Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ
Вид РИД
Изобретение
Изобретение относится к области приема и обработки сигналов спутниковых систем навигации, а именно, к устройствам для одновременного приема сигналов различных систем спутниковой навигации и может быть использовано в навигаторах, обеспечивающих прокладывание маршрутов транспортных средств и других подвижных объектов, а также для ускоренного определения местоположения в условиях высокого уровня помех, частой потери сигналов спутниковой навигации или многократных отражений сигналов от различного вида объектов.
В настоящее время имеется две орбитальные группировки спутников, позволяющие осуществлять навигацию, это такие глобальные системы позиционирования как Американская GPS и Российская ГЛОНАСС. Используемые на сегодняшний день коммерческие навигационные приемники предполагают использование открытых кодов одной или обеих из них в частотных диапазонах L1 и/или L2. В последнем случае такие приемники часто называют приемниками глобальной спутниковой навигационной системы (GNSS). Кроме этого, активно развиваются и перспективные проекты Европейской системы Galileo, а также Китайская BieDou (Compass). С появлением новой элементной базы мультистандартные, мультидиапазонные приемники, использующие все возможности видимой группировки спутников уже имеющихся систем и готовые к приему сигналов новых навигационных стандартов, становятся все более и более доступными и востребованными у массового потребителя.
Одной из основных проблем, решаемых в современных навигационных приемниках, является быстрое обнаружение и устойчивый прием сигналов, обеспечивающие быстрое определение местоположения пользователя и бесперебойное слежение за последующим его перемещением. Особенно эта задача актуальна при сложных условиях приема, таких как высокая скорость передвижения объекта и/или наличие множества препятствий, нарушающих прямую видимость спутников и приводящих к быстрой смене их видимой группировки (например, таких как плотная городская застройка). Необходимость отслеживать максимально возможное количество спутников разных систем навигации для оперативного включения их в решение ведет к созданию мультистандартных навигационных приемников, заметно выигрывающих в скорости и точности определения местоположения у своих моностандартных аналогов. Существующие различия в формировании сигналов всех актуальных на сегодняшний день стандартов навигации не позволяют использовать многие известные решения для GPS-ГЛОНАСС приемников. С другой стороны, простое наращивание числа каналов для приема сигналов спутников каждой новой системы навигации делает приемник ресурсоемким, что зачастую неприемлемо, в частности для мобильных устройств. Таким образом, на передний план выходит задача создания высокоскоростного, энергоэффективного, универсального многоканального приемника, ресурсы которого могут быть гибко адаптированы к текущей ситуации.
Известен из уровня техники патент США №6441780 ((Receiver for pseudo-noise signals from satellite radio-navigation system», опубл. 27.08.2002 г. Данное изобретение представляет собой многоканальный двухстандартный GPS-ГЛОНАСС приемник диапазона L1. Основной задачей, решаемой известным устройством, является борьба с многолучевым распространением принимаемого со спутника сигнала. Для оценки влияния многолучевости и ее компенсации, в каждый из параллельных каналов, помимо корреляционных подканалов Р (Prompt, точная настройка ПСП) и EML (дифференциальная оценка временной синхронизации при помощи кодовой комбинации Early Minus Late - опережающей и запаздывающей ПСП), вводится дополнительный корреляционный подканал для оценки смещения строба ПСП принимаемого сигнала, а подаваемая на EML канал кодовая последовательность может суммироваться с корректирующей последовательностью символов. К недостаткам данного устройства можно отнести относительно низкую скорость захвата сигналов спутников, поскольку поиск ведется последовательным перебором всех кодовых задержек с использованием имеющегося набора параллельных каналов. Кроме этого, такой приемник не позволит принимать сигналы Bei Dou и Galileo.
В патенте РФ №2435307 «Устройство для обработки навигационных сигналов ГЛОНАСС, GPS и Galileo», опубл. 27.11.2011, предлагается также приемник, построенный на основе Prompt-EML канала, но модифицированный для приема Galileo. В сигнале этой навигационной системы кроме вторичного кода используется модуляция поднесущей последовательностью, в частности ВОС (1,1). ВОС - Binary Offset Carrier - меандровая (двухуровневая) модуляция. ВОС (1,1) означает, что каждый символ дальномерного кода, следующего с тактовой частотой 1,023 МГц, модулируется одним периодом прямоугольного колебания типа меандр. Для снятия этого поднесущего колебания в канал добавлен соответствующий демодулятор. Однако описанный следящий канал не позволяет производить быстрый поиск сигналов и не предполагает расширения принимаемых сигналов за счет приема сигналов BieDou (Compass).
Наибольшую скорость обнаружения, захвата и слежения за принимаемым сигналом обеспечивают устройства, использующие набор параллельных корреляторов. При этом основным недостатком многоканальных устройств такого типа остается их ресурсоемкость. Решение, предложенное в патенте США №6208291 «Highly parallel GPS correlator system and method», опубл. 27.03.2001 г., направлено на уменьшение ресурсоемкости коррелятора. Оно состоит в том, что используется несколько параллельных каналов приема, в каждом из которых для обнаружения и временной синхронизации при помощи К подканалов анализируются все возможные задержки сигнала данного спутника (в случае GPS с ПСП 1023 отсчета, при 2-х отсчетах на чип это составляет К=2046 позиций кода), а для уменьшения габаритов накопление производится при помощи многовходового мультиплексора, одного сумматора и блока памяти для хранения всех результатов накоплений, работающих на частоте в несколько раз выше частоты обработки данных в подканалах. Такая структура позволяет очень быстро произвести временную синхронизацию, но оно оптимизировано под прием только GPS сигналов и не позволяет эффективно корректировать смещение частоты в условиях высокой динамики объекта.
Заявка на выдачу патента США №20070160121 «Method and apparatus for performing signal correlation.)), опубл. 12.07.2007 г., предлагает альтернативный подход к уменьшению аппаратных ресурсов при построении многоканального приемника. Согласно данному изобретению в каждом из каналов производится частичная корреляция для блока символов, длиной X, и последующее суммирование результатов накопления Y таких блоков, причем X*Y равно длине ПСП. В режиме поиска тактовая частота в каналах может повышаться в несколько раз относительно режима слежения для повышения точности, а частичные когерентные накопления на смежных временных интервалах могут быть использованы для оценки доплеровского смещения частоты. Не смотря на повышенную точность подстройки в каналах, поиск в таком устройстве все также производится последовательным перебором всех возможных гипотез при помощи имеющегося набора каналов, что приводит к длительному времени поиска. Кроме этого такой приемник также не позволит принимать сигналы Bei Dou и Galileo.
Решение, предложенное в патенте США №7061972 «GPS receiver having dynamic correlator allocation between a memory-enhanced channel for acquisition and standard channels for tracking», опубл. 13.06.2006 г., использует поисковый канал, содержащий память данных и набор параллельных корреляционных каналов для слежения за сигналами спутников. Канал с памятью позволяет записать выборку данных произвольной длины в память и на высокой скорости произвести ее анализ при помощи имеющегося в канале коррелятора, следящие каналы в это время отключаются. После обнаружения сигнала, канал с памятью отключается, а прием осуществляется при помощи следящих каналов. Недостатком такой архитектуры можно считать то, что корреляционное ядро следящих каналов в режиме захвата также используется для обработки записанного в память сигнала, т.е. выключается из приема сигнала и не позволяет одновременно проводить высокоскоростной поиск и эффективное слежение/подстройку уже найденных сигналов спутников. Кроме этого, такой приемник также не приспособлен к приему сигналов Bei Dou и Galileo.
Идея записи выборки сигнала и последующего поиска по записанной выборке рассмотрена также в патенте США №6091785 «Receiver Having a memory based search for fast acquisition of a spread spectrum signal», опубликованном 18.04.2000 г., В изобретении предусмотрены аппаратно непересекающиеся устройство для быстрого обнаружения сигнала и набор каналов слежения. Быстрый поиск выполняется путем записи реплики принимаемого сигнала в память и сравнения ее с репликами кода во всех возможных комбинациях сдвига по частоте и по задержке ПСП. Количество хранимых в памяти реплик в этом случае будет равно количеству возможных сдвигов кода, что ведет к использованию большого элемента памяти, заменяющего в данном решении традиционные генератор ПСП и гетеродин, используемый для компенсации доплеровского сдвига частоты. Для поиска Следящие каналы используют слежение с помощью параллельных корреляторов и Е, Р и L - кодов ПСП. Помимо большой ресурсоемкости, оно ориентировано только на прием GPS сигнала, что можно также считать недостатком приведенного в описании изобретения устройства.
В патенте РФ №245663 «Спутниковый навигационный глонасс/gps/galileo-приемник с корреляторами, асинхронно управляемыми внешним процессором» от 20.07.2012 представлен по сути программно-аппаратный комплекс, в котором для выполнения части операций, необходимых для обработки принятых сигналов, используется внешний компьютер, не входящий в состав приемника. В качестве внешнего компьютера может выступать специализированное устройство, ориентированное на решение навигационных задач, а также настольный компьютер, ноутбук, планшетный компьютер, смартфон или другое мобильное устройство.
Аппаратные блоки корреляторов ГЛОНАСС и GPS/Galileo, согласно описанию, включают в себя корреляторы двух типов. Блок корреляторов первого типа содержит один или несколько массивов корреляторов, обеспечивающих параллельное вычисление корреляций для группы смежных позиций возможного начала эпохи определенного спутника при заданном доплеровском смещении. Корреляции вычисляются для задаваемого диапазона позиций, отстоящих друг от друга на фиксированный шаг. Блок корреляторов второго типа содержит набор корреляторов, обеспечивающих параллельное вычисление корреляций для произвольных позиций и доплеровских смещений одного или нескольких спутников. Особенностью корреляторов в предлагаемом устройстве является возможность загрузки в них модифицированных образцов навигационного сигнала (реплик). Размер реплик соответствует длительности повторяемого псевдослучайного кода (эпохи), равной одной миллисекунде для сигналов GPS и ГЛОНАСС и четырем миллисекундам для сигнала Galileo.
Очевидным недостатком такого решения, прямо указанном в описании изобретения, является то, что из-за использования внешнего программного модуля навигационная задача решается в предположении, что динамика объекта, на котором установлен приемник, не слишком высока, а предельная чувствительность обеспечивается лишь в статическом режиме.
В патенте RU 2334357 «Устройство поиска навигационных сигналов» от 20.09.2008 также рассматривается решение с использованием трех систем навигации, однако описанный многоканальный коррелятор позволяет только осуществлять поиск систем GPS, Galileo и ГЛОНАСС без слежения.
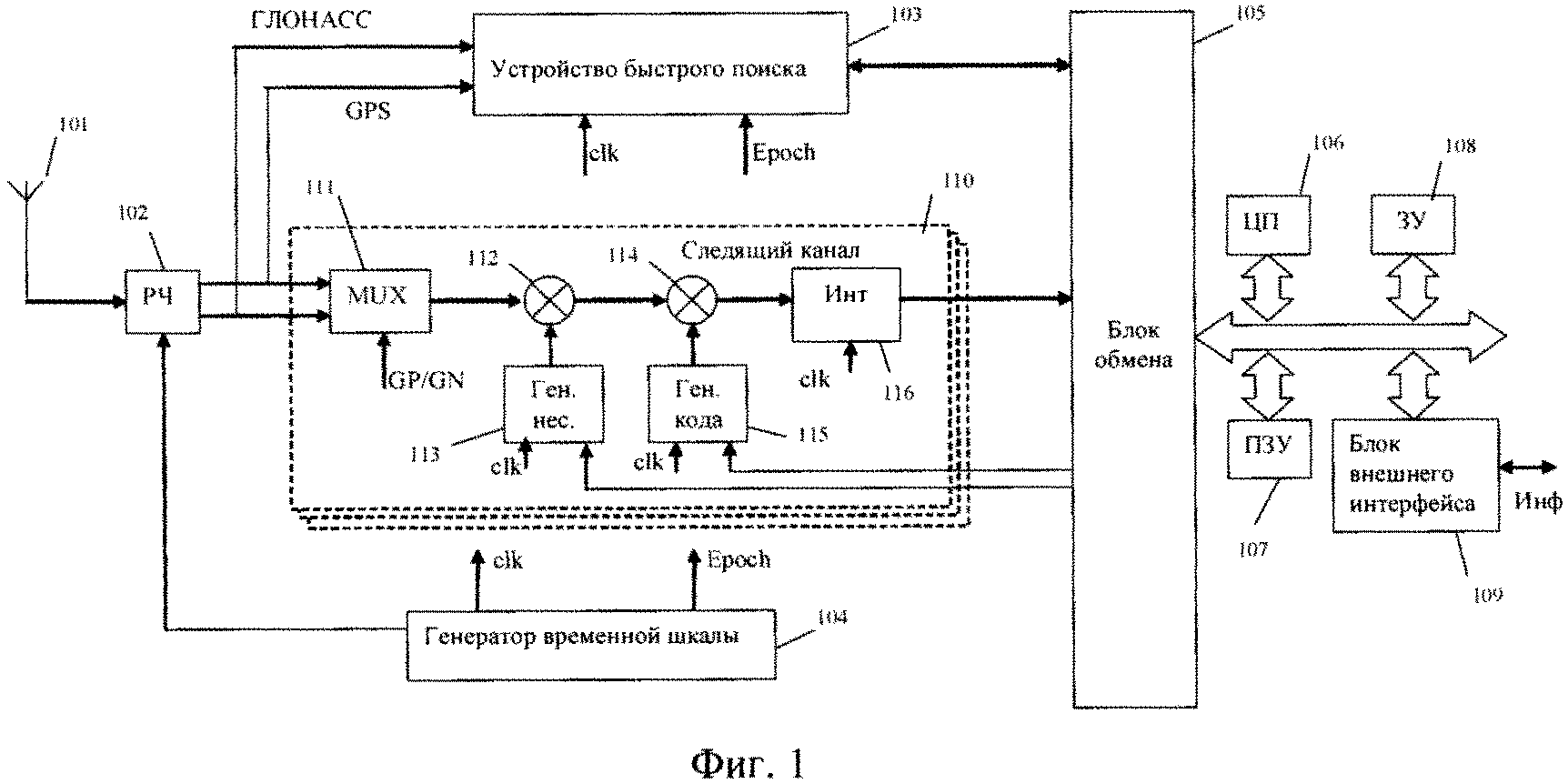
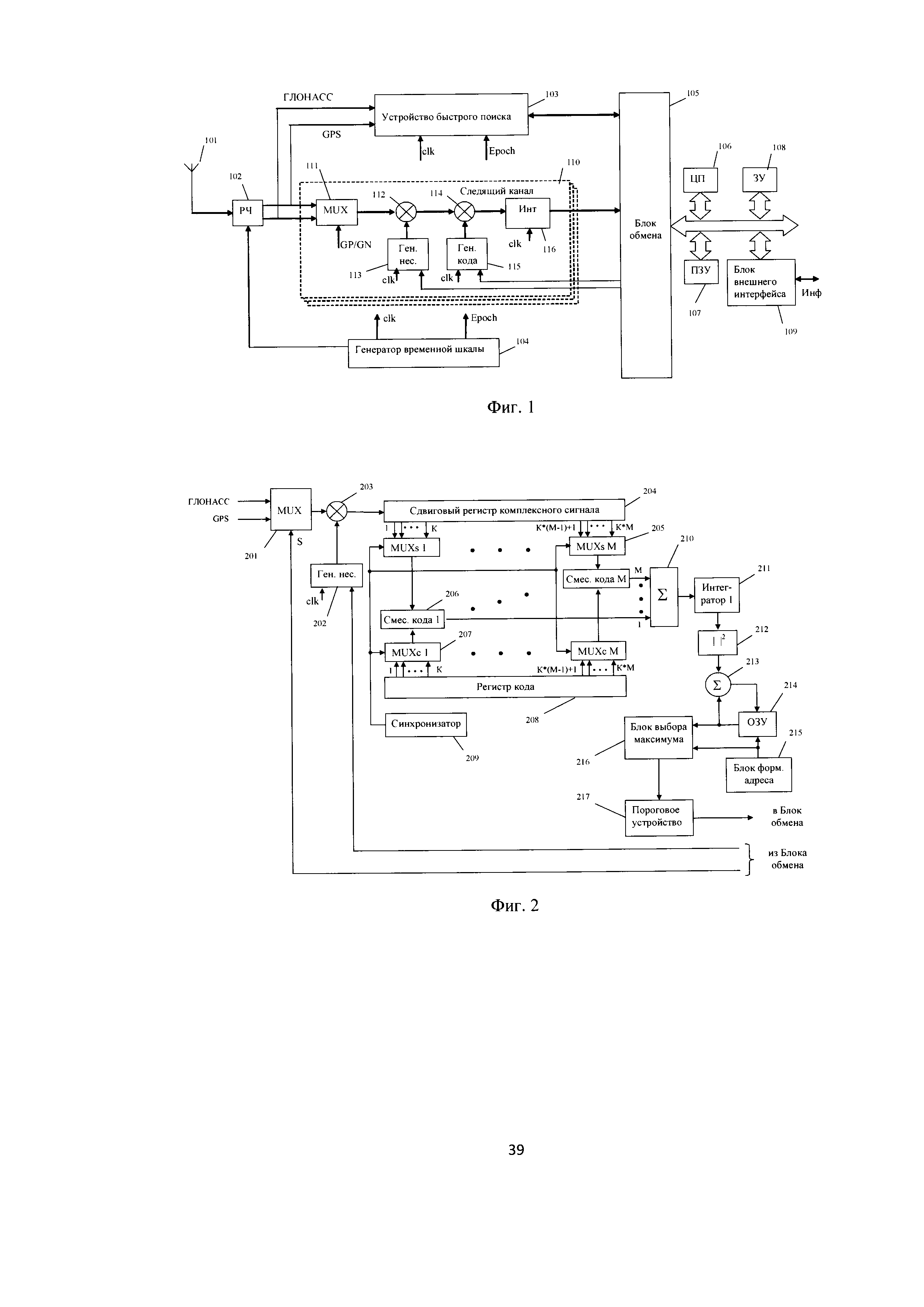
Наиболее близким к заявленному изобретению является приемник спутниковой навигации с устройством быстрого поиска навигационных сигналов в условиях высокой динамики объекта, описанный в патенте РФ 2341898, опубликованном 20.12.2008 г.. Блок-схема устройства приведена на рис 1. Блок-схема устройства быстрого поиска раскрыта на рис 2. Данный приемник выбран в качестве прототипа заявленного изобретения.
Приемник-прототип относится к приемникам сигналов спутниковых радионавигационных систем GPS и ГЛОНАСС открытого кода частотного диапазона L1. Его технический результат заключается в уменьшении времени поиска сигнала. Приемник содержит антенну 101, радиочастотный преобразователь 102, N канальный цифровой коррелятор 110, устройство быстрого поиска 103, формирователь сигналов меток времени 104 и вычислитель, в котором устройство быстрого поиска 103 содержит входной мультиплексор 201 сигналов GPS/ГЛОНАСС, цифровой генератор несущий 202, смеситель несущий 203, сдвиговый регистр сигнала 204, регистр кода 208, М мультиплексоров сигнала 205, М мультиплексоров кода 207, М смесителей кода 206, М-входовый сумматор 210, интегратор 211, блок вычисления квадрата модуля комплексного числа 212, второй сумматор 213, ОЗУ 214, блок формирования адреса ОЗУ 215, блок выбора максимума 216, пороговое устройство 217 и синхронизатор 209. Устройство быстрого поиска 103 обеспечивает свертку сигнала из сдвигового регистра комплексного сигнала 204 и кодовой последовательности из регистра кода 208, когерентное накопление сигнала на интервале 1 мс в интеграторе 211 с последующим некогерентным накоплением (сумматор 213 и ОЗУ 214) в течение времени, задаваемого вычислителем в зависимости от ожидаемого отношения сигнал-шум. Управление работой приемника осуществляется при помощи микропроцессора 106 (ЦП), использующего для хранения программы ПЗУ 107, для хранения промежуточных данных оперативную память (ЗУ 108) и осуществляющего взаимодействие с остальными блоками приемника при помощи шины данных и Блока обмена 105. Обмен данными с внешними относительно приемника устройствами осуществляется при помощи блока внешнего интерфейса 109.
Устройство-прототип представляет собой приемник спутниковой навигации с устройством быстрого поиска навигационных сигналов в условиях высокой динамики объекта, содержащий последовательно соединенные радиочастотный преобразователь 102, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор 110, связанный посредством блока обмена данными 105 с вычислителем, содержащим связанные шиной обмена данными центральный процессор (ЦП) 106, оперативное запоминающее устройство (ОЗУ) 108, постоянное запоминающее устройство (ПЗУ) 107 и блок внешнего интерфейса 109, входы-выходы которого образуют информационные входы-выходы приемника, причем N канальный цифровой коррелятор содержит генератор временной шкалы приемника 104, а каждый канал цифрового коррелятора содержит входной мультиплексор GPS/ГЛОНАСС 111, генератор несущей 113, смеситель несущей 112, генератор кода 115, смеситель кода 114 и интегратор 116. С целью сокращения времени поиска в условиях высокой динамики объекта, дополнительно вводится устройство быстрого поиска 103, содержащее синхронизатор 209, входной мультиплексор GPS/ГЛОНАСС 201, генератор несущей 202, смеситель несущей 203, один вход которого соединен с выходом радиочастотного преобразователя, а второй вход соединен с выходом генератора несущей, сдвиговый регистр комплексного сигнала 204, вход которого соединен с выходом смесителя несущей, регистр кода 208, первую группу М мультиплексоров 205, каждый из которых имеет К входов, причем j-й вход i-го мультиплексора соединен с (j+(i-1)⋅К)-м разрядом сдвигового регистра комплексного сигнала, а входы управления всех мультиплексоров соединены с выходом синхронизатора 209, вторую группу М мультиплексоров 207, каждый из которых имеет К входов, причем j-й вход i-го мультиплексора соединен с (j+(i-1)⋅К)-м разрядом регистра кода, а входы управления всех мультиплексоров соединены с выходом синхронизатора 209, М смесителей кода 206, причем один вход i-го смесителя входа соединен с выходом i-го мультиплексора из первой группы мультиплексоров 205, а второй вход i-го смесителя кода 206 соединен с выходом i-го мультиплексора из второй группы мультиплексоров 207, первый М-входовой сумматор 210, входы которого соединены с выходами смесителей кода, интегратор 211, вход которого соединен с выходом первого М-входового сумматора 210, блок формирования квадрата модуля комплексного сигнала 212, вход которого соединен с выходом интегратора, второй сумматор 213, запоминающее устройство (ОЗУ) 214, блок формирования адреса ОЗУ 215, причем один вход второго сумматора 213 соединен с выходом блока формирования квадрата модуля комплексного сигнала 212, а второй вход соединен с выходом ОЗУ 214, причем вход ОЗУ 214 соединен с выходом последовательного сумматора 213, а вход адреса ОЗУ 214 соединен с выходом блока формирования адреса ОЗУ 215, блок выбора максимума 216, один вход которого соединен с выходом ОЗУ 214, а второй вход соединен с выходом блока формирования адреса ОЗУ 215, и пороговое устройство 217, вход которого соединен с выходом блока выбора максимума 216, а выход соединен с входом блока обмена данными 105.
Недостатки прототипа заключаются в следующем. Приемник-прототип предназначен для ускорения поиска сигналов хорошо известных стандартов GPS и ГЛОНАСС и принципиально не позволяет принимать сигналы новых стандартов навигации, поскольку не имеет ряда необходимых для этого дополнительных блоков, обусловленных структурой этих сигналов. Кроме того, одно устройство быстрого поиска, как показывает практика, не дает желаемого увеличения скорости поиска, поскольку позволяет за одну итерацию проверить только одну гипотезу смещения частоты для сигнала только одного спутника. Вместе с этим, однократного анализа всей области неопределенности зачастую бывает недостаточно для точной синхронизации и необходимо проводить более длительный анализ вычисления на интервалах, превышающих одну эпоху.
Задачей заявленного изобретения является создание устройства для одновременного приема сигналов различных систем спутниковой навигации с увеличенной скоростью определения местоположения в сложных условиях приема, а также с увеличенным объемом и достоверностью информации о географических координатах объекта и с возможностью использования нескольких спутниковых навигационных систем: ГЛОНАСС, GPS, Galileo и BeiDou/Compass.
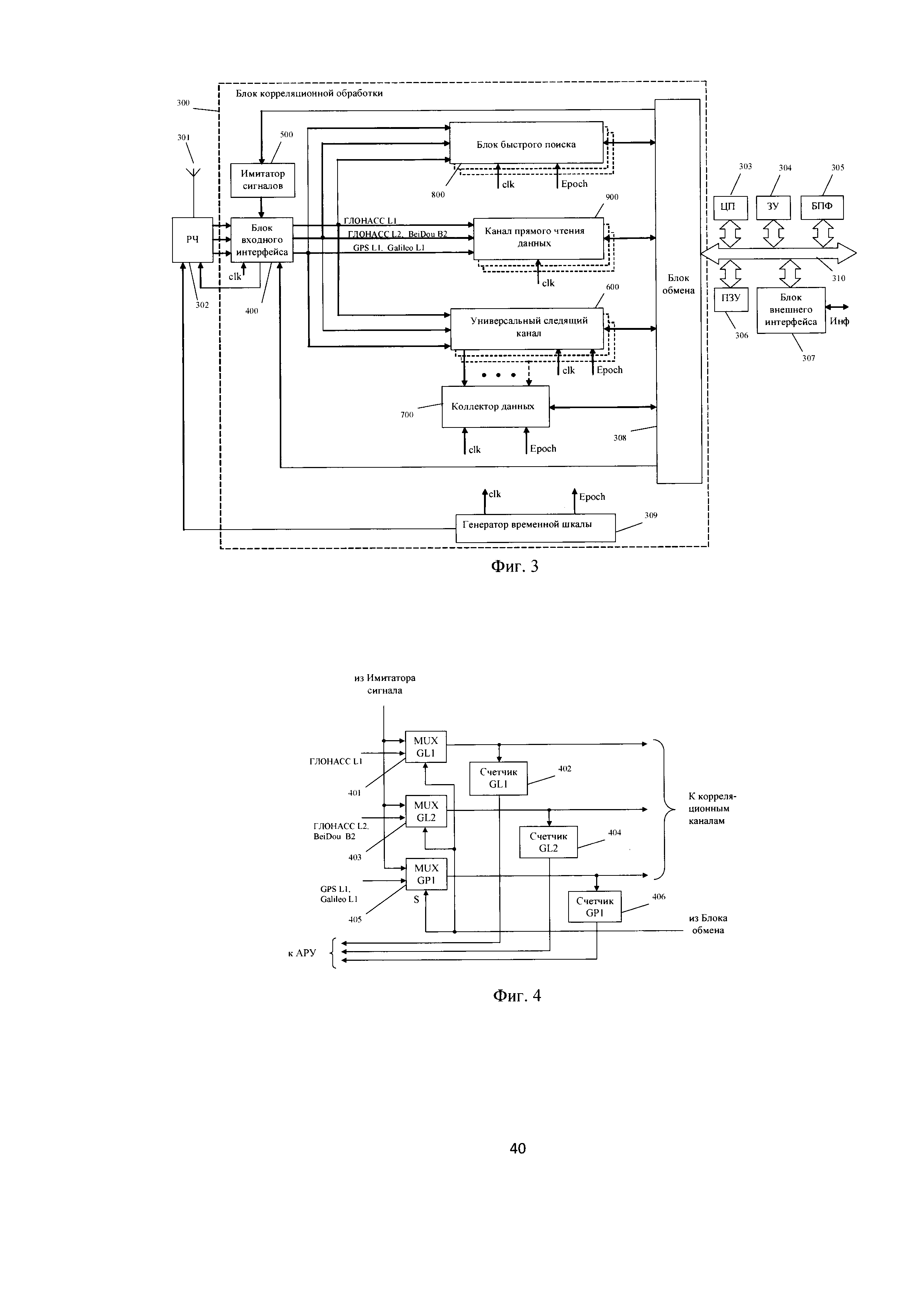
Поставленная задача решена путем создания устройства для одновременного приема сигналов различных систем спутниковой навигации, содержащего антенну 301, которая соединена с входом приемного радиочастотного тракта 302, который соединен с блоком корреляционной обработки (БКО) 300, а также навигационный центральный процессор (ЦП) 303, оперативное запоминающее устройство (ЗУ) 304, постоянное запоминающее устройство (ПЗУ) 306, и блок быстрого преобразования Фурье (БПФ) 305, которые соединены между собой и с блоком корреляционной обработки (БКО) 300 через шину данных и выполненные с возможностью взаимодействия с другими блоками устройства через блок обмена (БО) 308, входящий в состав блока корреляционной обработки (БКО) 300, который также содержит многоканальный коррелятор (МКК) с различными типами каналов, состоящий из Q блоков быстрого поиска (ББП) 800, Z универсальных следящих каналов (УСК) 600, N каналов прямого чтения данных 900, коллектора 700, блока входного интерфейса (БВИ) 400, блока обмена (БО) 308, имитатора сигналов (ИС) 500 и генератора временной шкалы (ГВШ) 309, при этом блок обмена 308 соединен с блоками быстрого поиска (ББП) 800, с универсальными следящими каналами (УСК) 600, с каналами прямого чтения данных 900, с коллектором 700, с блоком входного интерфейса (БВИ) 400, с блоком обмена (БО) 308, с имитатором сигналов (ИС) 500 и с генератором временной шкалы (ГВШ) 309, который соединен с радиочастотным трактом 302, который соединен с блоком входного интерфейса 400, который соединен с имитатором сигналов 500, при этом коллектор 700 соединен с универсальными следящими каналами, а блоки быстрого поиска 800, универсальные следящие каналы 600, каналы прямого чтения данных 900 и блок входного интерфейса 400 соединены между собой, причем
- приемный радиочастотный тракт 302 содержит демодулятор, выполненный с возможностью выделения сигналов, содержащих сигналы навигационных спутников, в заранее заданном диапазоне несущих частот;
- блок внешнего интерфейса 307 выполнен с возможностью обмена информацией с конечными потребителями;
- блок входного интерфейса 400 выполнен с возможностью организации взаимодействия между блоком корреляционной обработки 300 и радиочастотным трактом 302, а также с возможностью подключения входов корреляционных каналов к выходу имитатора сигналов 500 в режиме самотестирования;
- блок входного интерфейса 400 выполнен с возможностью передачи сигналов на входы блоков быстрого поиска 800, универсальных следящих каналов 600 и каналов прямого чтения данных 900, выполненных с возможностью обработки этих сигналов в соответствии с заданными настройками каждого из каналов;
- в рабочем режиме блок корреляционной обработки 300 выполнен с возможностью функционирования во взаимодействии с центральным процессором 303, а центральный процессор 303 выполнен с возможностью считывания результатов корреляционной обработки посредством блока обмена 308 из каналов и с возможностью записи данных управления каналами в соответствующие регистры каналов;
- генератор временной шкалы 309, выполнен с возможностью формирования шкалы времени устройства, сигналов эпохи, длительность интервалов между которыми равна длительности эпохи системы спутниковой навигации, а также с возможностью генерации тактового сигнала, необходимого для синхронизации работы всех блоков и модулей устройства;
- блоки быстрого поиска 800 выполнены с возможностью проверки наличия сигнала навигационного спутника в принимаемом радиочастотном сигнале, с возможностью определения временного сдвига сигнала навигационного спутника относительно сигнала эпохи, а также, с возможностью определения доплеровского смещения частоты, вызванного взаимным перемещением спутника и устройства, при этом блоки быстрого поиска 800 выполнены с возможностью обнаружения наличия и положения, относительно сигналов эпохи, последовательности проверяемых сигналов в сигналах, выделенных демодулятором, по меньшей мере, за две эпохи;
- каждый блок быстрого поиска 800 содержит формирователь гипотезы о принимаемом сигнале, которая является представленными в машиночитаемом виде данными, которые обеспечивают формирование последовательности проверяемых сигналов, соответствующих последовательности сигналов навигационных спутников и задается в соответствии с настройками, передаваемыми из центрального процессора 303 через блок обмена 308;
- каждый блок быстрого поиска 800 соединен с шиной данных, адресов и управления устройства, что обеспечивает возможность передачи проверенной гипотезы, вместе с данными об указанном положении, на один из универсальных следящих каналов 600, а также возможность непрерывного определения и подстройки положения гипотезы относительно сигнала эпохи и, таким образом, оптимального выделения принимаемого сигнала, кроме того, блок быстрого поиска 800 выполнен с возможностью запроса и/или установки через шину данных, адресов и управления, новой гипотезы после проверки гипотезы как при наличии, так и при отсутствии последовательности проверяемых сигналов в сигналах, выделенных демодулятором;
- каждый универсальный следящий канал 600 содержит мультиплексор 601 выбора одного из входных сигналов, доплеровский гетеродин, состоящий из генератора несущей 602 и перемножителя 603, L корреляторов 620, демодулятор 604, программируемый генератор кода 608, табличный генератор кодовой последовательности на ОЗУ 609, программируемой линии задержки ПЛЗ 630 и два связанных с ними мультиплексора 605 и 610, при этом
- демодулятор 604 выполнен с возможностью съема дополнительной модуляции сигнала поднесущей;
- табличный генератор кодовой последовательности на ОЗУ 609 выполнен с возможностью использования произвольных нерекурсивных кодовых последовательностей;
- программируемый генератор кода 608 выполнен с возможностью рекурсивной генерации кода на основе заданного полинома;
- первый мультиплексор 610 выполнен с возможностью переключения между табличным генератором кода 609 и программируемым генератором кода 608 на основе полиномов;
- второй мультиплексор 605 выполнен с возможностью выбора для дальнейшей обработки сигнала с входа или с выхода демодулятора 604;
- каждый из L корреляторов 620 выполнен с возможностью использования задержанной относительно других корреляторов кодовой последовательности;
- каналы прямого чтения данных 900 выполнены с возможностью осуществления предварительной обработки в соответствии с заданными настройками и с возможностью накапливания обработанных данных;
- коллектор 700 выполнен с возможностью считывания в соответствии с заданными настройками результатов работы универсального следящего канала 600, с возможностью формирования пакетов данных, с возможностью преобразования пакеты данных к требуемому машиночитаемому виду и с возможностью выдачи их по запросу ЦП 303;
- в случае использования блока быстрого преобразования Фурье 305 для быстрого поиска сигнала навигационного спутника, запоминающее устройство 304 выполнено с возможностью записи через блок обмена 308 принимаемых данных после предварительной обработки, а блок быстрого преобразования Фурье 305 выполнен с возможностью обработки под управлением центрального процессора 303 данных из запоминающего устройства 304, при этом использования центрального процессора 303 для получения необходимых оценок смещения частоты и временной задержки принимаемого сигнала.
В предпочтительном варианте осуществления устройства блок входного интерфейса 400 и блок внешнего интерфейса 307, выполнены с возможностью обмена данными с внешними устройствами, при этом блок входного интерфейса 400 выполнен с возможностью преобразования входного сигнала в формат машиночитаемых данных, используемых в устройстве, а блок внешнего интерфейса 307 выполнен с возможностью осуществления обратного преобразования.
В предпочтительном варианте осуществления устройства радиочастотный тракт 302 выполнен с возможностью выделения сигналов, содержащих сигналы навигационных спутников, выбранных из набора сигналов, включающего в себя сигнал ГЛОНАСС диапазона L1 и L2, сигнал GPS диапазона L1, сигнал Galileo диапазона L1, сигнал BeiDou диапазона В2 из выходного сигнала приемного радиочастотного тракта.
В предпочтительном варианте осуществления устройства универсальные следящие каналы 600, выполнены с возможностью удерживания синхронизации с обнаруженным сигналом навигационного спутника, с возможностью выделения полезного сигнала навигационного спутника, а также с возможностью проведения допоиска сигнала навигационного спутника в плохих условиях приема.
В предпочтительном варианте осуществления устройства блоки быстрого поиска 800 выполнены в виде согласованного фильтра, выполненного в виде тактируемого сдвигового регистра сигнала навигационных спутников и программируемого регистра кода, с возможностью проведения когерентного и/или некогерентного выявления корреляции путем сравнения, на каждом такте, отдельных разрядов кода регистра кода и соответствующих отдельных разрядов кода сдвигового регистра, а также с возможностью накопления когерентных и/или некогерентных оценок корреляции на длительности как минимум двух эпох.
В предпочтительном варианте осуществления устройства формирователь гипотезы выполнен в виде генератора опорной кодовой последовательности, выполненного с возможностью формирования сигнала с произвольной задержкой по времени и отстройкой по частоте.
В предпочтительном варианте осуществления устройства блок корреляционной обработки 300 выполнен с возможностью приема на вход сигналов, подлежащих обработке, из трех радиочастотных трактов аналоговой приемно-усилительной части навигационного приемника, при этом каждый из трех входных сигналов является комплексным, вещественная и мнимая компоненты сигналов могут быть одноразрядными или двухразрядными в формате «знак-амплитуда».
В предпочтительном варианте осуществления устройства коррелятор 620 выполнен с возможностью перемножения принимаемого сигнала с опорной кодовой последовательностью и накопления полученной свертки на интервале одной эпохи в первом интеграторе 622 с последующим накоплением этих оценок во втором интеграторе 623 на интервале как минимум двух эпох.
В предпочтительном варианте осуществления устройства
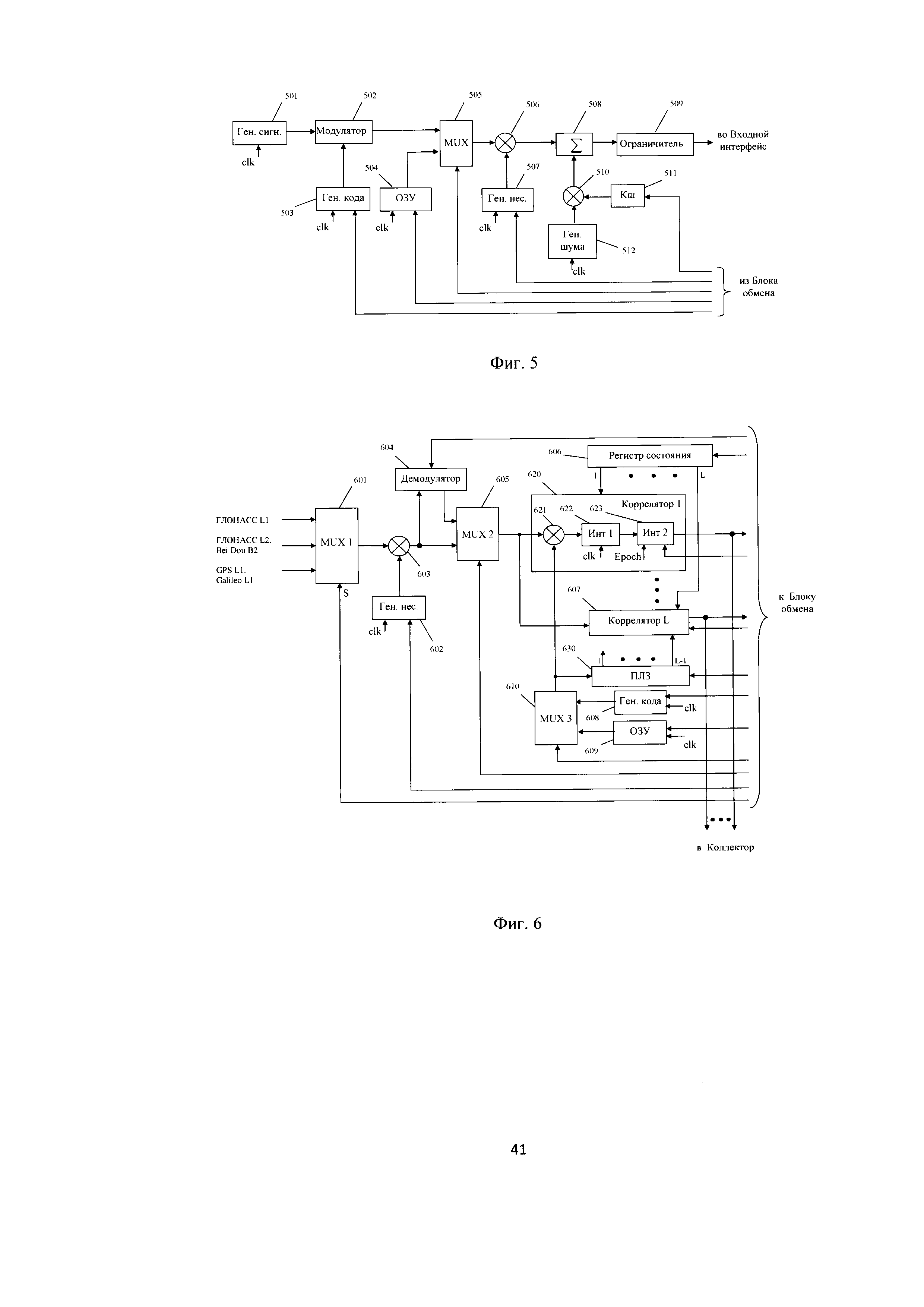
- имитатор сигнала 500 содержит генератор сигнала 501, модулятор 502, генератор кода 503, табличный генератор кодовой последовательности на ОЗУ 504, мультиплексор 505 выбора одного из входных сигналов, доплеровский гетеродин, состоящий из генератора несущей 507 и перемножителя 506, имитатор шума, состоящий из генератора шума 512, регистра коэффициента шума 511, перемножителя 510, сумматор сигнала и шума 508 и выходной ограничитель сигнала 509, при этом
- генератор сигнала 501 выполнен в виде генератора бинарной последовательности в форме меандра;
- табличный генератор кодовой последовательности на ОЗУ 504 выполнен с возможностью использования произвольных реплик сигнала или нерекурсивных кодовых последовательностей;
- программируемый генератор кода 503 выполнен с возможностью рекурсивной генерации кода на основе заданного полинома;
- мультиплексор 505 выполнен с возможностью переключения между табличным генератором кода 504 и программируемым генератором кода 503 на основе полиномов.
Для выполнения задачи заявленного изобретения в устройстве для одновременного приема сигналов различных систем спутниковой навигации реализованы следующие аппаратные возможности:
- поиск сигналов Galileo при помощи блока быстрого преобразования Фурье;
- ускоренный поиск новых спутников ГЛОНАСС, GPS и BeiDou/Compass в заданном диапазоне частотных и временных отстроек при помощи блоков быстрого поиска с возможностью получения когерентных и некогерентных оценок сигнала произвольной длительности на интервале нескольких эпох;
- допоиск сигнала для уже обнаруженных спутников всех четырех систем навигации в процессе слежения за ними непосредственно в следящих каналах, а также поиск сигнала с использованием комбинации этих блоков;
- прием сигналов всех типов при помощи универсальных следящих каналов, позволяющих принимать сигналы как модулированные поднесущей сигналы, так и нет, при этом расширяющая кодовая последовательность может быть задана как полиномом; так и в виде таблицы;
- использование коллектора для ускорения обмена данных между навигационным процессором и следящими каналами посредством предварительной обработки и формирования пакетов данных с заданной структурой.
Удовлетворение требований всех стандартов навигации и условий приема достигается за счет гибко переключаемой структуры блоков в соответствии с заданными настройками, а повышенная точность и скорость определения местоположения за счет использования максимально возможного количества спутников всех стандартов навигации, удовлетворяющих заданным критериям отбора.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
Фиг. 1. Блок-схема приемника спутниковой навигации, выполненная согласно прототипу.
Фиг. 2. Блок-схема устройства быстрого поиска, выполненная согласно прототипу.
Фиг. 3. Блок-схема устройства для одновременного приема сигналов различных систем спутниковой навигации, выполненная согласно изобретению.
Фиг. 4. Блок-схема блока входного интерфейса, выполненная согласно изобретению.
Фиг. 5. Блок-схема имитатора сигнала, предназначенного для проверки работоспособности устройства для одновременного приема сигналов различных систем спутниковой навигации, выполненная согласно изобретению.
Фиг. 6. Блок-схема универсального следящего канала, выполненная согласно изобретению.
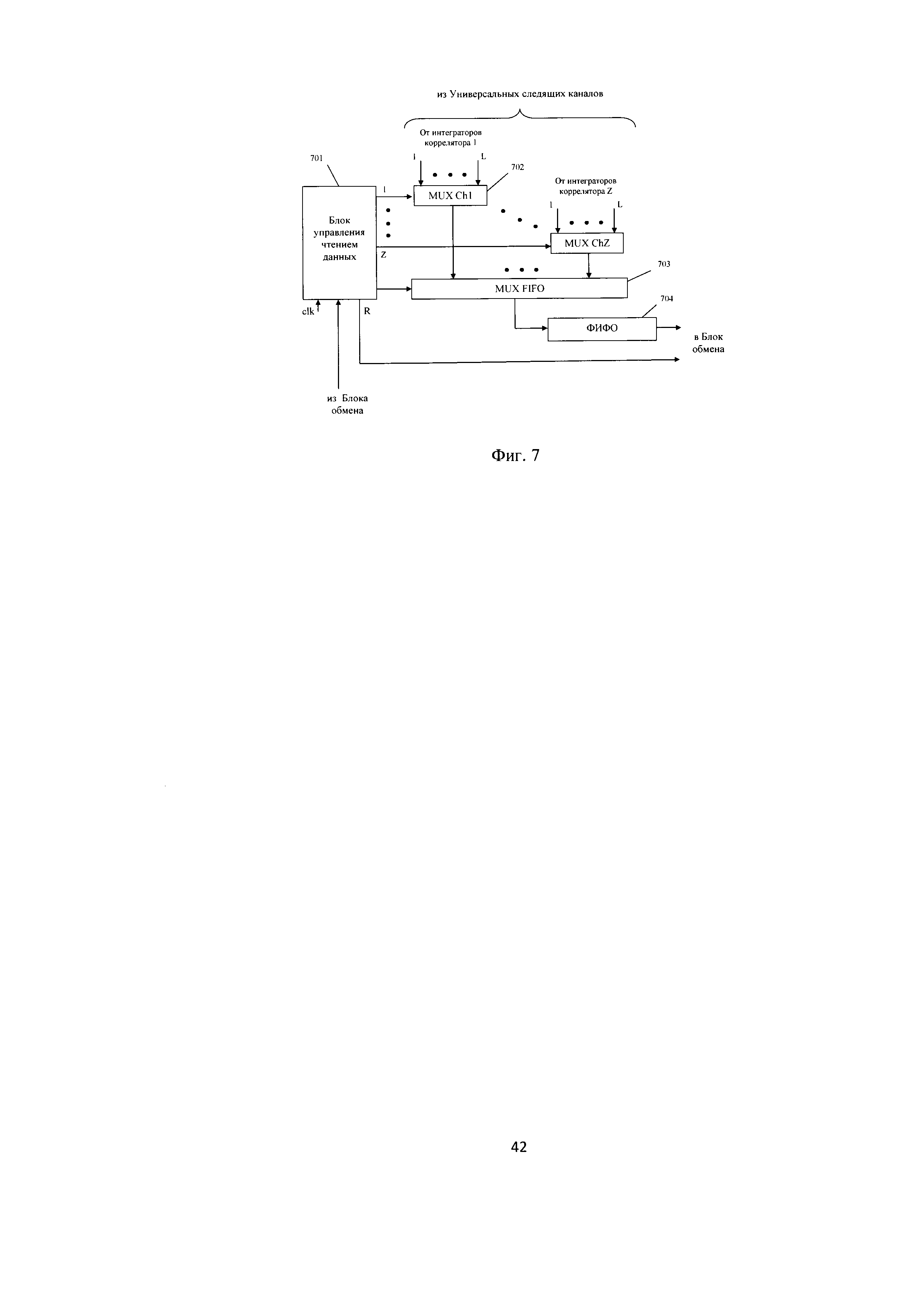
Фиг. 7. Блок-схема коллектора, выполненная согласно изобретению.
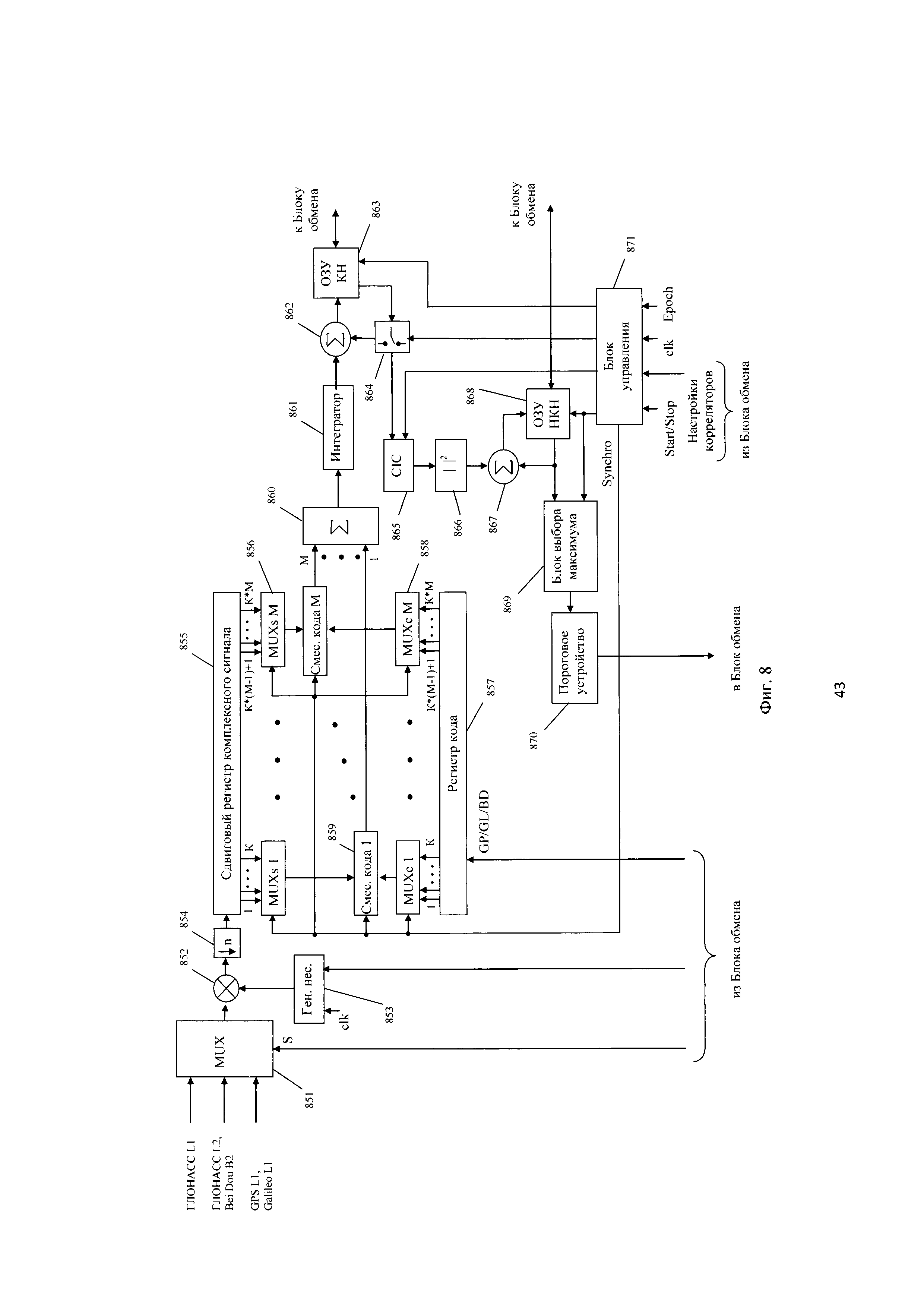
Фиг. 8. Блок-схема блока проверки гипотезы, выполненная согласно изобретению.
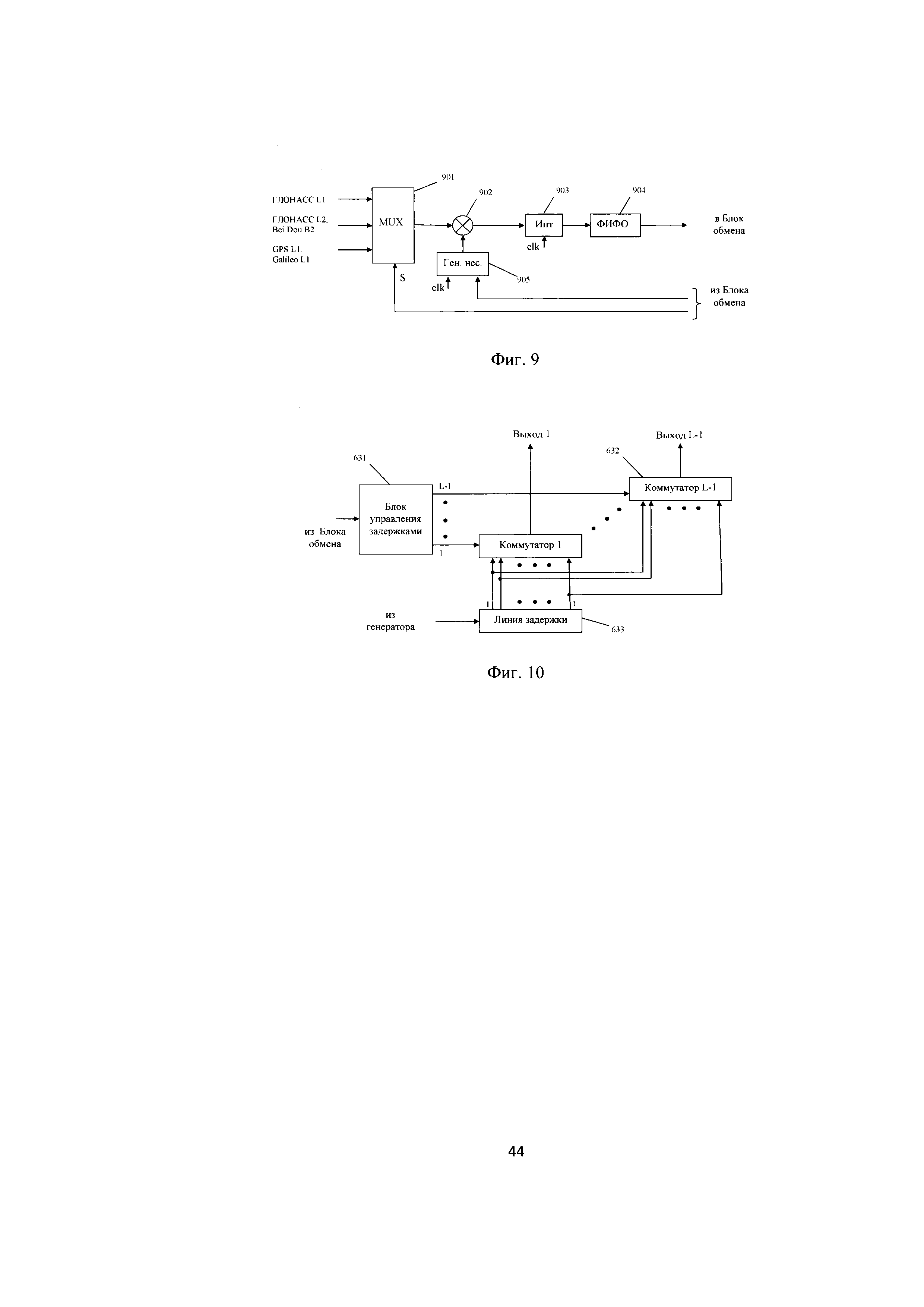
Фиг. 9. Блок-схема канала прямого чтения данных, предназначенного для реализации методов программного поиска, выполненная согласно изобретению.
Фиг. 10. Блок-схема программируемой линии задержки, выполненная согласно изобретению.
Рассмотрим более подробно вариант выполнения заявленного изобретения, представленный на Фиг. 1-10.
Решение задачи быстрого поиска для всех систем навигации, кроме Galileo, и последующего слежения за всеми обнаруженными спутниками осуществляется при помощи блока корреляционной обработки (БКО) 300. БКО представляет собой, с функциональной точки зрения, многоканальный коррелятор (МКК) с различными типами каналов и состоит из нескольких блоков быстрого поиска (ББП) 800, группы универсальных следящих каналов (УСК) 600, коллектора 700, блока входного интерфейса (БВИ) 400, блока обмена (БО) 308, имитатора сигналов (ИС) 500 и генератора временной шкалы (ГВШ) 309. Для быстрого поиска сигналов Galileo используется набор каналов прямого чтения данных (КПЧД) 900, также входящих в состав БКО, центральный процессор (ЦП) 303 и блок быстрого преобразования Фурье (БПФ) 305. Для большей наглядности чертежей, множество идентичных параллельных каналов и их межблочных соединений показано на примере одного блока такого типа, причем передаваемые из блока в блок сигналы являются многоразрядными шинами, включающими в себя все сигналы, передаваемые между этими блоками.
В рабочем режиме БКО функционирует во взаимодействии и под управлением навигационного центрального процессора (ЦП) 303, хранение необходимых для работы БКО и ЦП данных и настроек осуществляется в запоминающих устройствах 306 и 304. ЦП посредством блока обмена 308 считывает результаты корреляционной обработки из каналов и записывает данные управления каналами в соответствующие регистры каналов. Объединение всех блоков в единое функционально-законченное устройство выполняется посредством шины данных 310 и блока обмена 308, обеспечивающих необходимый обмен данными и управляющими командами. Для обмена данными с внешними относительно заявляемого изобретения устройствами используются блок входного интерфейса 400 и блок внешнего интерфейса 307. Необходимые для синхронной многоканальной корреляционной обработки тактовые синхросигналы формируются в генераторе временной шкалы 309.
Блок входного интерфейса 400 предназначен для организации взаимодействия между БКО 300 и радиочастотным трактом (РЧ) 302, а также для подключения входов корреляционных каналов (блоков 600, 800 и 900) к выходу имитатора сигнала 500 в режиме самотестирования. Радиочастотный тракт обеспечивает выделение полезного сигнала в трех частотных диапазонах: L1 GPS/Galileo (СА), L1 ГЛОНАСС(СТ) и L2 ГЛОНАСС/В2 BeiDou(CT).
Как видно из чертежа блока входного интерфейса 400, показанного на Фиг. 4, помимо трех мультиплексоров 401, 403 и 405 («MUX GL1», «MUX GL2» и «MUX GP1» соответственно), переключающих вход БКО 300 в режим самотестирования и обратно в рабочий режим, в нем реализованы счетчики уровней входных сигналов 402, 404 и 406 (соответственно, на чертеже это «Счетчик GL1», «Счетчик GL2» и «Счетчик GP1»). Счетчики предназначены для подсчета среднего уровня сигналов, поступающих из радиочастотного тракта. Для оценки уровня сигналов в каждом подканале на заданном интервале накапливают число единичных состояний каждого из битов входных сигналов. В конце накопления результат передают на выход устройства и он может быть использован для регулировки уровня входного АРУ. Для самотестирования на соответствующие входы мультиплексоров подают сигнал GPS или Galileo (блок 405), ГЛОНАСС (блоки 401 и 403) или BeiDou (блок 403).
Имитатор 500 предназначен для формирования сигнала, который с достаточной достоверностью повторяет сигнал одного из спутников GPS, GLONASS, Galileo либо BeiDou. Этот сигнал может использоваться вместо входного сигнала из радиочасти 302 в приемнике, что позволяет проверить работу модулей, входящих в его состав.
В состав имитатора, представленного на Фиг. 5, входят генератор сигнала 501, генератор кода (псевдослучайной последовательности - ПСП) 503, модулятор 502, ОЗУ 504, мультиплексор 505, генератор несущей (доплеровский гетеродин) 507, перемножитель 506, генератор шума 512 с масштабирующим умножителем в составе перемножителя 510 и регистра задания масштабирующего коэффициента (Кш) 511, а также сумматор 508 и ограничитель уровня сигнала 509.
Генератор кода 503 служит для задания опорной ПСП, имитирующей ПСП спутника. Модулятор 502 служит для наложения меандра с частотой 50 Гц, генерируемого генератором сигнала, на выходной сигнал генератора ПСП. Это имитирует биты информационной последовательности, которые модулируют ПСП со спутника. Параметры ПСП задают извне через блок обмена 308. Для формирования сигнала Galileo, использующего табличные коды, применяют запись необходимой реплики сигнала в ОЗУ 504 и последующую циклическую ее выдачу. Выбор источника тестового сигнала осуществляют при помощи мультиплексора 505. Использование записанных в ОЗУ 504 реплик для формирования тестового сигнала позволяет также расширить возможность самотестирования оборудования в целом путем имитации самых различных ситуаций, реплики которых также могут быть записаны в ОЗУ 504.
Генератор несущей 507 служит для формирования опорного сигнала, который используют для переноса тестового сигнала с нулевой частоты на доплеровскую. Уровень шума задают масштабирующим коэффициентом Кш в регистре 511. После формирования требуемой смеси сигнала и шума в сумматоре 508 полученный сигнал ограничивают при помощи ограничителя 509 до входной разрядности корреляционных каналов (600, 800 и 900) блока корреляционной обработки 300.
Блок обмена 308, в наиболее общем случае, представляет собой микроконтроллер, связанный с ЦП 303 шиной данных. При передаче управляющих сигналов от ЦП 303 к блокам БКО 300, микроконтроллер получает из ЦП 303 сигналы управления, декодирует их, считывает необходимые данные из оперативной памяти ЗУ 304 и передает их в соответствующие блоки. При передаче данных от блоков к ЦП 303 микроконтроллер выполняет обратную операцию, считывая полученные данные с выходов блоков и записывая их в оперативную память для дальнейшей обработки их в ЦП 303. Другим вариантом реализации БО 308 может быть блок регистров, представляющий собой двухпортовую оперативную память, хранящую текущие настройки каналов и результаты их работы, доступ к элементам которой с одной стороны есть у всех блоков БКО 300, а с другой стороны у ЦП 303.
Генератор временной шкалы 309 формирует шкалу времени приемника, которая представляет собой импульс миллисекундной эпохи Epoch с длительностью в один такт clk и периодом 1 мс, и генерирует сам тактовый сигнал clk, необходимый для синхронизации работы всех блоков и модулей приемника.
Универсальные следящие каналы (УСК) 600 предназначены для слежения за сигналом спутников GPS, Galileo, ГЛОНАСС и BeiDou. Большое количество подканалов, обеспечивающих высокую точность слежения, делают их наиболее эффективными при слежении за спутниками с маленьким отношением сигнал/шум или в условиях сильной многолучевости распространения сигнала. Другим назначением универсальных следящих каналов 600 в составе устройства является допоиск полезного сигнала в тех случаях, когда сигнал спутника обнаружен блоком проверки гипотезы (блоком быстрого поиска 800), но точность слежения за ним все еще недостаточна по тем или иным критериям алгоритма обнаружения сигнала.
Каждый из универсальных следящих каналов 600, представленный на Фиг. 6, состоит из L подканалов 620 с регулируемой отстройкой по времени прихода входного сигнала от 0 до t тактов частоты оцифровки. На входе канала с помощью мультиплексора 601 (MUX1), управляемого сигналом ЦП 303 S (Select), осуществляют выбор между сигналами GPS L1//Galileo L1//ГЛОНАСС L1//ГЛОНАСС L2//BeiDou В2, после чего выбранный сигнал перемножают в перемножителе 603 на опорный сигнал гетеродина 602 (Ген. нес.) для переноса сигнала с ПЧ с учетом доплеровской частоты на нулевую. При приеме сигнала с поднесущей (например, такого как Galileo) необходима его дополнительная демодуляция, которую выполняют в демодуляторе 604. Управление демодулятором осуществляет ЦП 303 через БО 308. Мультиплексор 605 (MUX2) позволяет выбирать, какой из двух сигналов будет использован в дальнейшем для снятия расширяющего кода, при этом при помощи мультиплексора 610 (MUX3) подключают необходимый источник кодовой последовательности: генератор кода 608 или ОЗУ 609. После свертки выбранного сигнала и кода производят накопление результата на протяжении заданного времени (от 1 до 32 эпох) в интеграторах 622 и 623. Таким образом, в каждом подканале возможно получение оценки принимаемого сигнала на длительности, превышающей длительность эпохи. Управление выбором принимаемого сигнала и используемого расширяющего кода осуществляется внешним ЦП 303.
Работа каждого подканала в УСК 600 разрешается записью единицы в соответствующий бит L-разрядного регистра состояния 606. Если работа подканала запрещена, то он переключается в режим пониженного энергопотребления. Таким образом, запретив работу всех L подканалов, дезактивируется весь канал.
Результатами работы канала являются накопления во всех используемых подканалах в интеграторах 622 (Инт.1) на длительности эпохи и интеграторах 623 (Инт. 2) на длительности нескольких эпох, которые доступны для считывания напрямую через БО 308 или с использованием коллектора 700. Длительность накопления задается ЦП 303 посредством БО 308 как число от 0 до 31, которое определяет число эпох, в течение которых будут производиться накопления.
Формирование опорной кодовой последовательности для каждого из подканалов выполняют при помощи генератора кода 608, ОЗУ 609 и программируемой линии задержки (ПЛЗ) 630 с L-1 отводами. Генератор кода 608 используют для генерации ПСП, которые могут быть описаны в виде полиномов, ОЗУ 609 используют для генерации табличных кодов, которые могут, как загружаться при начальной инициализации устройства, так и подгружаться из внешнего ПЗУ 306 по необходимости. Количество отводов программируемой линии задержки на единицу меньше количества подканалов, поскольку на первый канал опорная последовательность подается без задержки
В одном из вариантов программируемой линии задержки (ПЛЗ), представленной на Фиг. 10, для подключения любого элемента линии задержки 633, хранящей отсчеты ПСП, к любому из L-1 выходов ПЛЗ 630 используют L-1 коммутаторов 632, каждый из которых своими входами соединен с элементами линии задержки. Управление переключением коммутаторов осуществляют Блоком управления задержками 631, получающим управляющий сигнал из блока обмена 308 и декодирующим его в управляющие сигналы коммутаторов 632.
При обработке информации от нескольких систем навигации с разными структурами сигналов возникает необходимость отслеживать момент окончания декодирования и накопления в интеграторах данных в каждом из каналов. При большом количестве следящих каналов и подканалов в них опрос готовности и последующее считывание разрозненных данных занимает значительное время, создавая излишнюю нагрузку на блок обмена 308, ЦП 303 и связанную с ним шину данных, снижая производительность устройства в целом. Для исправления этой ситуации в заявляемом изобретении добавлен коллектор данных 700, показанный на Фиг. 7.
Коллектор содержит Z мультиплексоров 702 («MUX1»…«MUXZ») по числу УСК 600, каждый из которых имеет L входов, по числу подканалов в УСК. Выходы этих мультиплексоров в свою очередь, при помощи мультиплексора 703 («MUX FIFO») могут коммутироваться к выходному ФИФО 704. Для управления работой коллектора 700 используется блок управления чтением данных 701 (БУЧД), который может быть реализован, например, на микроконтроллере. БУЧД 701 получает из ЦП 303 всю необходимую информацию о настройках отдельных следящих каналов и необходимой длине формируемых пакетов данных. В нужный момент времени БУЧД 701 разрешает считывание результатов накоплений в каналах и запись их в ФИФО 704. Результаты накоплений подканалов и каналов записываются в ФИФО 704 друг за другом, формируя, таким образом, последовательность данных, которая может быть считана ЦП 303 через БО 308 сплошным потоком через обращение к одному единственному адресу. При этом разрозненные данные от каналов также остаются доступными при обращении к каналам через БО 308 и могут быть использованы при необходимости. По окончании формирования пакета данных БУЧД 701 передает в БО 308 флаг готовности R.
Канал прямого чтения данных 900 (КПЧД) показан на Фиг. 9 и предназначен для реализации методов программного поиска с использованием БПФ 305 (в нашем случае для приема Galileo), либо других программных алгоритмов поиска и слежения. Он включает в себя входной мультиплексор 901, гетеродин для переноса сигнала с ПЧ и компенсации доплеровского смещения (блоки 905 и 902), интегратор 903 с программируемой длительностью накоплений и буфер данных типа ФИФО 904.
Первоначально, входные данные попадают в мультиплексор 901, который, в зависимости от настроек, выбирает один из входов. Затем данные переносятся с ПЧ на нулевую частоту путем умножения на сигнал гетеродина 905 в перемножителе 902. Результат перемножения накапливается в интеграторе 903, результаты накоплений сохраняются в буфере данных 904 типа ФИФО глубиной в 2048 отсчетов, откуда ЦП 303 может считать их через БО 308 и шину данных.
Для поиска временной задержки сигнала Galileo данные из ФИФО 904 сохраняют в ЗУ 304, далее путем программной интерполяции и/или децимации в ЦП 303 формируются две выборки с равной частотой дискретизацией, одну из которых формируют из принимаемого сигнала, а вторую из опорной последовательности. Путем прямого преобразования Фурье обеих выборок, их поэлементного перемножения и обратного преобразования Фурье формируют выборку решений, максимум которой указывает на временную задержку сигнала. Для поиска частотного сдвига эту операцию выполняют многократно с заданным шагом для всех возможных частотных позиций. При этом в зависимости от особенностей реализации алгоритма ЦП 303 может быть использован как программный перенос по частоте уже полученной выборки, так и коррекция опорного сигнала гетеродина в КПЧД 900 перед накоплением данных в его ФИФО 904.
Блоки быстрого поиска 800 предназначены для поиска сигналов спутников в диапазонах GPS L1/ГЛОНАСС L1/ГЛОНАСС L2/BeiDou В2. Поиск производят по всем гипотезам по задержке ПСП, при заданной ПСП, и доплеровской частоте, в связи с чем данный блок представляет собой, по сути, блок проверки гипотезы о сигнале с данными параметрами, при этом генератор ПСП (ОЗУ для табличных кодов) и доплеровский гетеродин являются формирователем гипотезы, а результат корреляционного накопления - оценкой правдоподобия данной гипотезы. Результатом поиска является амплитуда максимального полученного корреляционного пика и его позиция относительно сигнала эпохи в чипах и долях чипа с дискретом в полчипа для GPS и ГЛОНАСС и один чип для BeiDou. Реализация ББП 800, показана на Фиг. 8, работает блок следующим образом.
ББП 800 производит вычисление взаимокорреляционной функции (ВКФ) входного сигнала и ПСП в 2046(GPS)/2044(ГЛОНАСС)/2046(BeiDou) позициях ПСП относительно сигнала. Выбор опорной ПСП, используемой для поиска, осуществляют путем подачи управляющего сигнала «GP/GL/BD», переключающего регистр кода, хранящего опорные последовательности, в режима поиска GPS, ГЛОНАСС или BeiDou. Значения корреляции когерентно накапливают на длительности 1-16 эпох, после чего результат когерентного накопления учитывают в некогерентном накоплении от 1 до 16 раз.
ББП 800 может находиться в режиме ожидания и в режиме поиска. В режиме ожидания обработка поступающих данных не производят, результаты последнего поиска хранят в ОЗУ КН 863 (ОЗУ когерентных накоплений) и ОЗУ НКН 868 (ОЗУ некогерентных накоплений) блока и доступны для ЦП 303 через блок обмена 308. По команде ЦП 303 блок быстрого поиска 800 переключают в режим поиска или останавливается. Это производят путем подачи сигнала запуска/остановки (Start/Stop) на соответствующий вход блока управления 871.
Блок управления управляет 871 общей работой устройства и формирует все необходимые для работы сигналы. В блоке вырабатывается необходимый для работы мультиплексоров кода 858 («MUXc 1» - «MUXc М») и мультиплексоров сигнала 856 («MUXs 1» - «MUXs М»), а также смесителей кода 859 («Смес. кода 1» - «Смес. Кода М») синхронизирующий сигнал (Synchro). Прекращение подачи данного сигнала прекращает работу указанных блоков. Помимо этого блок управления 871 управляет настройками когерентных и некогерентных накоплений в ОЗУ 863 и 868, переключением ключа выдачи информации 864 из ОЗУ КН 863 в CIC-фильтр 865, изменением порядка CIC-фильтра и адресацией данных в ОЗУ 863 и 868 при записи/чтении.
В режиме поиска входные сигналы блока с антенны 301 и радиочастотного тракта 302 через блок входного интерфейса 400 поступают на мультиплексор 851 («MUX»), где из трех входных сигналов выбирается один для обработки. Затем сигнал перемножают (в перемножителе 852) на опорный сигнал доплеровского гетеродина («Ген. нес») 853, частота которого задается ЦП 303. Результат перемножения децимируют в n раз дециматором 854 (если необходимо, до достижения 1-го отсчета на чип ПСП для BeiDou, 2-х отсчетов на чип ПСП для GPS и 4-х отсчетов на чип для ГЛОНАСС) и сохраняют в линии задержки 855. Так сохраняют 2046(GPS)/2044(ГЛОНАСС)/2046(BeiDou) результата, после чего ББП начинает вычислять ВКФ отсчетов сохраненного сигнала с ПСП, хранящейся в памяти (регистр кода 857). Вычисленную комплексную ВКФ аккумулируют в буфере когерентных накоплений (ОЗУ КН 863) по адресу, соответствующему анализируемой позиции сигнала относительно ПСП (в начальный момент по адресу 0). При первом когерентном накоплении происходит загрузка числа в ОЗУ КН (ОЗУ когерентного накопления), при остальных - накопление.
После этого сохраненная в линии задержки 855 выборку циклически сдвигают, снова вычисляют ВКФ и накапливают в ОЗУ КН 863 по следующему адресу. Это повторяют 2046/2044 раза, что дает ВКФ для всех взаимных положений данных относительно ПСП. Для получения когерентного накопления на длительности нескольких эпох данный процесс вычисления повторяют несколько раз, результаты последующих комплексных ВКФ суммируют с предыдущими в ОЗУ КН 863. Количество повторений задают посредством ЦП 303.
Сформированные когерентные оценки всех позиций сдвига опорного кода выдают через ключ 864, контролируемый блоком управления 871 на вход КИХ фильтра с единичными коэффициентами 365 («CIC»). В тех случаях, когда сигнал обрабатывается на частоте больше чиповой, использование фильтрации позволяет собрать энергетику нескольких чипов в один и максимизировать таким образом истинный корреляционный пик. Порядок фильтра изменяется в зависимости от настроек, передаваемых из блока управления 871 (для BeiDou 1-й, для GPS 2-ой, для ГЛОНАСС 4-й).
По накоплению заданного количества когерентных накоплений и фильтрации, блок быстрого поиска производит некогерентное накопление: вычисляет мощность для каждой позиции когерентного накопления и накапливает их в ОЗУ НКН 868. На первом обращении к ОЗУ НКН 868 происходит загрузка данных в ОЗУ, на остальных - накопление.
Весь приведенный выше цикл повторяют столько раз, сколько сигналом из ЦП 303 задано некогерентных накоплений. Из результатов некогерентных накоплений выбирают максимальный (в блоке 869) и запоминают его позицию; если максимумов несколько, запоминают первый встреченный из них. Кроме того, результаты НКН на всем протяжении работы ББП сравнивают с порогом досрочного останова поиска (пороговое устройство 870). В случае превышения любым накоплением этого порога поиск останавливают, а позицию накопления запоминают в блоке выбора максимума 369. По окончании всех операций машину переключают в режим ожидания. Приведенную процедуру поиска применяют как для GPS, так и ГЛОНАСС.
Заявленное изобретение позволяет принимать сигналы как уже давно существующих GPS и ГЛОНАСС, так и новых, активно развиваемых систем навигации, например, таких как Galileo и BeiDou (Compass). Использование большого количества спутников, принадлежащих к орбитальным группировкам разных стандартов навигации, не только позволяет повысить скорость и точность решения навигационной задачи за счет выбора сигналов спутников с наилучшими условиями приема, но и дает возможность стабильно поддерживать навигацию на высоком уровне в случаях, когда по техническим, политическим, коммерческим или иным причинам одна из орбитальных группировок спутников оказывается недоступной. Кроме того, увеличение точности и скорости поиска новых спутников достигается за счет когерентно-некогереного накопления в ББП 800. Использование УСК 600 увеличивает возможности слежения за многолучевым сигналом и позволяет производить точный дополнительный поиск сигналов непосредственно в процессе работы приемника.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.
Устройство коммуникационного интерфейса для сети spacewire
Устройство видеонаблюдения
Система и способ трехмерной визуализации яркостной радиолокационной карты местности
Система и способ идентификации транспортных средств, противоправно вторгшихся на выделенную полосу
Рлс с программируемой временной диаграммой и способ ее функционирования
Система и способ определения нарушений правил дорожного движения при проезде перекрестка
Ядро сопроцессора быстрого преобразования фурье реального времени
Радиационно-стойкая библиотека элементов на комплементарных металл-окисел-полупроводник транзисторах
Способ и устройство ввода, обработки и вывода видеоизображения
Система регулирования уличного освещения и определения правонарушений и внештатных происшествий
Устройство коммуникационного интерфейса для сети spacewire
Устройство видеонаблюдения
Система и способ трехмерной визуализации яркостной радиолокационной карты местности
Система и способ идентификации транспортных средств, противоправно вторгшихся на выделенную полосу
Рлс с программируемой временной диаграммой и способ ее функционирования
Система и способ определения нарушений правил дорожного движения при проезде перекрестка
Ядро сопроцессора быстрого преобразования фурье реального времени
Радиационно-стойкая библиотека элементов на комплементарных металл-окисел-полупроводник транзисторах
Способ и устройство ввода, обработки и вывода видеоизображения
Система регулирования уличного освещения и определения правонарушений и внештатных происшествий

