Результат интеллектуальной деятельности: Устройство для прекращения неуправляемого движения модели летательного аппарата при ее динамических испытаниях на устойчивость и управляемость
Вид РИД
Изобретение
Изобретение относится к области экспериментальных исследований летательных аппаратов в аэродинамических трубах.
Для исследования динамики полета самолета на больших углах атаки в настоящее время используются испытания динамических моделей летательных аппаратов в аэродинамических трубах (АДТ) [Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета. Динамика продольного и бокового движения // Москва. Машиностроение. - 1979, стр. 31-35]. При этом применяются как свободнолетающие модели [Chambers, Joseph R. Modeling flight: the role of dynamically scaled free-flight models in support of NASA's aerospace programs / NASA SP 2009-575], так и модели, закрепленные на шарнире поддерживающего устройства [Прудников Ю.А., Сохи Н.П., Темляков Ю.Н. Патент РФ от 10.04.2004 г. №2226680 на изобретение «Устройство для исследования штопора самолета»]. Одной из главных опасностей при таких испытаниях является возникновение неуправляемого движения модели в потоке АДТ с большой амплитудой и скоростью, что может привести к удару модели о поддерживающее устройство, стенки рабочей части, сопла и диффузора трубы, ее разрушению и повреждению АДТ.
Известно устройство для прекращения неуправляемого движения модели летательного аппарата (ЛА) при динамических испытаниях, имеющее державку в виде направляющей, с закрепленной на ней моделью на шарнире [Беговщиц В.Н., Кабин С.В., Колинько К.А., Нуштаев П.Д., Храбров А.Н. Ученые записки ЦАГИ №3-4 /том XXVII/ 1996, «Метод свободных колебаний на упругом шарнире для исследования нестационарных аэродинамических производных при трансзвуковых скоростях потока»]. На державке установлена подвижная каретка в виде круглой втулки со скошенным краем, приводимая в движение пневмоцилиндром, расположенном в державке. По команде оператора каретка подводится к хвостовой части модели и прекращает ее неуправляемое движение. Это устройство малопроизводительно и неэкономично из-за больших затрат трубного времени, требующегося для его перенастройки при различных режимах испытаний, близких к потере устойчивости и управляемости. Также, при срабатывании устройства, хвостовая часть модели ударяется о втулку и испытывает значительные нагрузки.
В качестве прототипа рассмотрим устройство для прекращения неуправляемого движения модели летательного аппарата при динамических испытаниях на трехстепенной опоре, содержащее вертикальную стойку в виде направляющей, на которой установлена каретка, снабженная приводом перемещения вдоль стойки, и ограничитель перемещения модели при возникновении неустойчивости [Oesterlin Wilfried, Kraftmessung bei einrm Nachmbrsystem far den Modell - hubschrauber - Schweibeflug, "Messtehn Briefe", 14, №3, 1978, 49-53]. Перемещение модели и каретки измеряются тензодатчиками, наклеенными на упругие измерительные пластины, которые вырабатывают сигнал обратной связи, поступающий на серводвигатели, ограничивающие или прекращающие движение модели при ее неуправляемом движения.
Поскольку управление захватом модели производится оператором в ручном режиме, это увеличивает время спасения и повышает вероятность поломки модели. Также принцип механического ограничения движения модели приводит к возникновению больших ударных нагрузках на модель в момент срабатывания устройства. Кроме того, устройство громоздко и не позволяет точно моделировать условия обтекания модели из-за искажения поля потока при испытаниях в аэродинамических трубах.
Техническим результатом является увеличение скорости срабатывания устройства, устранение действующих на модель ударных нагрузок, уменьшение влияния на обтекание потоком модели и повышение точности испытаний.
Технический результат достигается тем, что в устройстве для прекращения неуправляемого движения модели летательного аппарата при ее динамических испытаниях на устойчивость и управляемость, содержащем вертикальную стойку с трехстепенной опорой, в модели выполнен внутренний отсек с дном, установленным на пружине, и закрытым крышкой с замком, управляемым дистанционно, парашютом, прикрепленном к хвостовой части модели и помещенным во внутреннем отсеке, при этом безразмерная длина строп парашюта  где lп - длина строп парашюта, ba - средняя аэродинамическая хорда крыла модели ЛА, находится в диапазоне от 3 до 5, а безразмерную площадь парашюта
где lп - длина строп парашюта, ba - средняя аэродинамическая хорда крыла модели ЛА, находится в диапазоне от 3 до 5, а безразмерную площадь парашюта  где Sп - площадь парашюта, S - площадь крала модели ЛА, определяют по формуле:
где Sп - площадь парашюта, S - площадь крала модели ЛА, определяют по формуле:
где  - безразмерное расстояние от оси вращения до точки крепления парашюта,
- безразмерное расстояние от оси вращения до точки крепления парашюта,  - величина безразмерного значения продольного момента инерции модели ЛА, где V∞ - скорость потока в АДТ, q=0,5ρV2∞ - величина скоростного напора, а ρ - плотность воздуха в АДТ.
- величина безразмерного значения продольного момента инерции модели ЛА, где V∞ - скорость потока в АДТ, q=0,5ρV2∞ - величина скоростного напора, а ρ - плотность воздуха в АДТ.
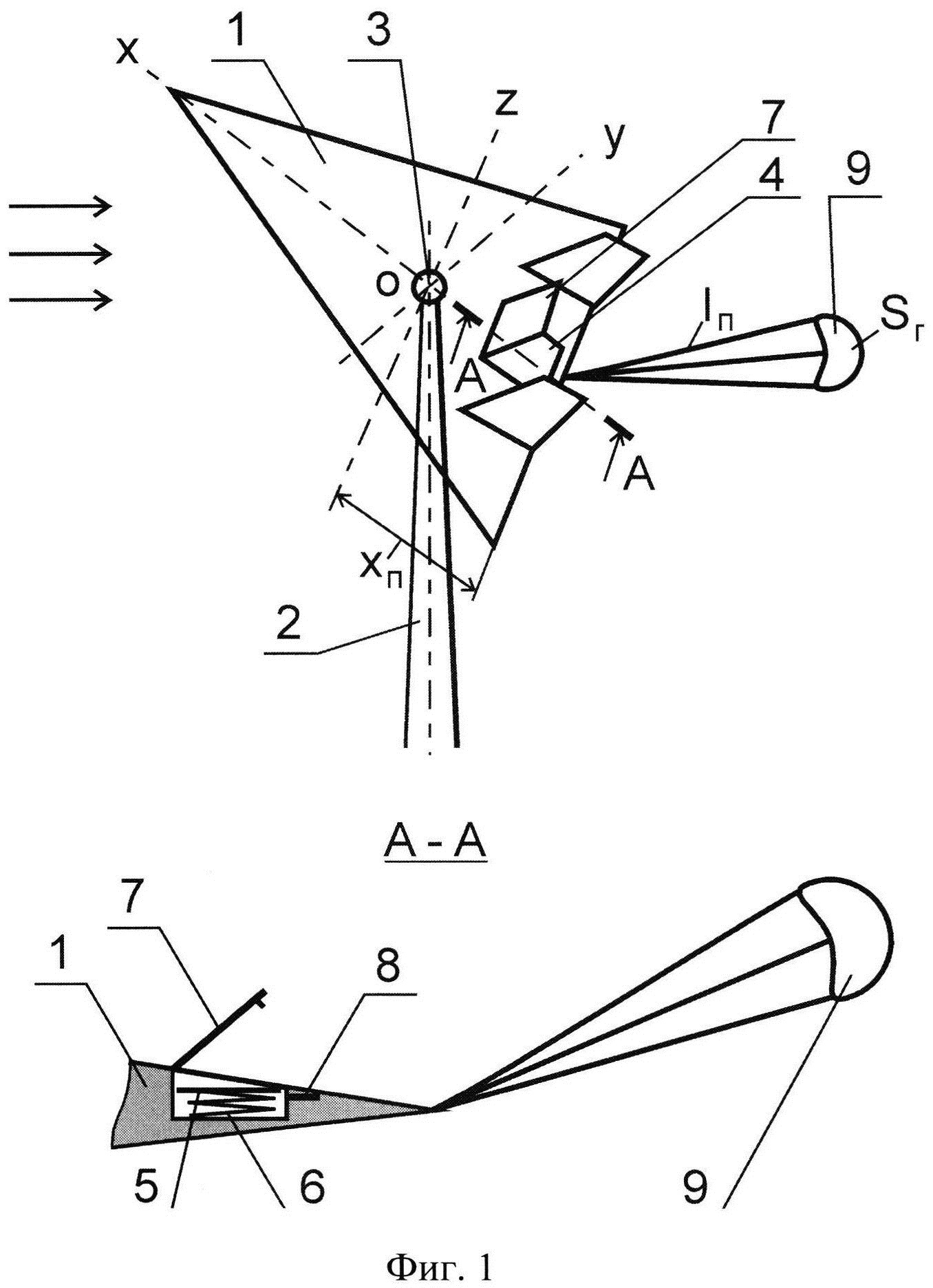
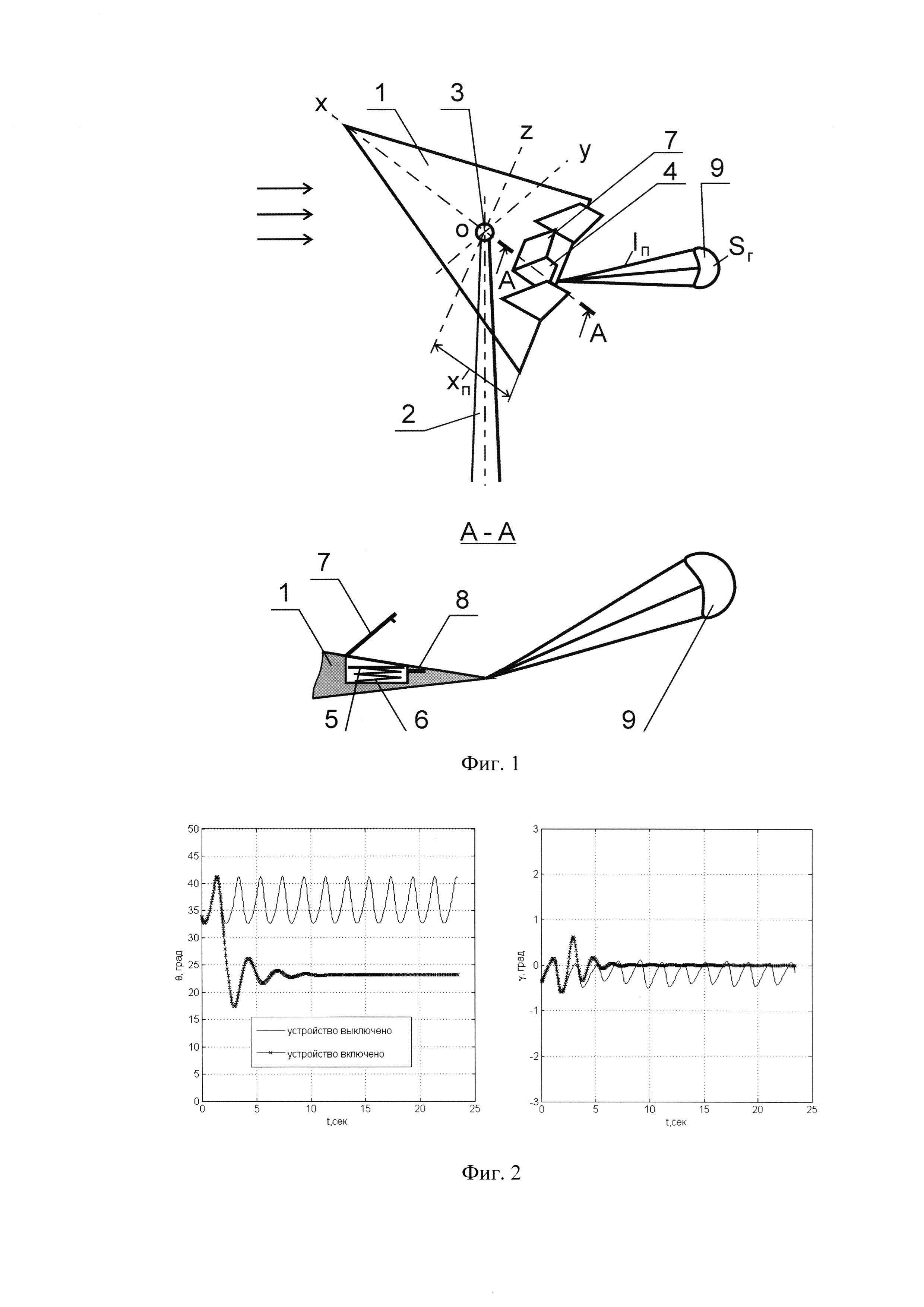
На фиг. 1 изображена схема устройства.
На фиг. 2 приведены зависимости во времени изменения углов тангажа и крена модели при ее неустойчивом движении с и без применения устройства, полученные методом расчета.
Устройство состоит из модели 1, установленной на стойке 2 в потоке АДТ при помощи трехстепенной опоры 3. В модели выполнен внутренний отсек 4, с дном 5, установленным на пружине 6, и крышкой 7 с замком 8, управляемым дистанционно от пульта управления (на схеме не показан). В отсеке помещен парашют 9, прикрепленный к хвостовой части модели. При этом безразмерная длина строп парашюта  , где lп - длина строп парашюта, ba - средняя аэродинамическая хорда крыла модели ЛА, находится в диапазоне от 3 до 5, а безразмерную площадь парашюта
, где lп - длина строп парашюта, ba - средняя аэродинамическая хорда крыла модели ЛА, находится в диапазоне от 3 до 5, а безразмерную площадь парашюта  где Sп - площадь парашюта, S - площадь крала модели ЛА, определяют по формуле:
где Sп - площадь парашюта, S - площадь крала модели ЛА, определяют по формуле:

где  - безразмерное расстояние от оси вращения до точки крепления парашюта,
- безразмерное расстояние от оси вращения до точки крепления парашюта,  ,
,  - величина безразмерного значения продольного момента инерции модели ЛА, где V∞ - скорость потока в АДТ, q=0,5ρV2∞ - величина скоростного напора, а ρ - плотность воздуха в АДТ. Так, для аэродинамической модели летательного аппарата с ba=0,2 м, S=0,3 м2, JZ=0,05 кг м2, хп=0,4 м и параметрами потока в АДТ V∞= 20 м/с, ρ=1,25 кг/м3 длина строп парашюта может меняться в пределах
- величина безразмерного значения продольного момента инерции модели ЛА, где V∞ - скорость потока в АДТ, q=0,5ρV2∞ - величина скоростного напора, а ρ - плотность воздуха в АДТ. Так, для аэродинамической модели летательного аппарата с ba=0,2 м, S=0,3 м2, JZ=0,05 кг м2, хп=0,4 м и параметрами потока в АДТ V∞= 20 м/с, ρ=1,25 кг/м3 длина строп парашюта может меняться в пределах  , а площадь парашюта будет равна
, а площадь парашюта будет равна 
Устройство работает следующим образом. При наличии набегающего потока в аэродинамической трубе и движении модели 1 относительно трех осей вращения, вследствие потери аэродинамической эффективности рулей управления, срыва потока с несущих поверхностей модели может возникнуть неуправляемое движение модели, сопровождающееся ее движением с большими амплитудами и скоростями. По сигналу с пульта управления, задаваемого оператором, или автоматически замок 8 освобождает крышку 7 отсека 4. Под действием пружины 6 дно 5 поднимает крышку 7 и выталкивает парашют 9, прикрепленный к хвостовой части модели, из отсека в поток АДТ. Парашют раскрывается в потоке. Усилие, создаваемое парашютом, заставляет модель развернуться по потоку, вследствие чего восстанавливается ее управляемое движение.
Эффективность предложенного устройства подтверждается результатами расчетного моделирования неуправляемого движения модели летательного аппарата на трехстепенной опоре в потоке АДТ и ее движения при срабатывании описанного устройства, представленными на фиг. 2. При выбрасывании парашюта амплитуда и скорость колебаний модели по углам тангажа и крена быстро убывает и становится равной нулю, модель прекращает неуправляемое движение и становится устойчивой и управляемой.
Таким образом, предлагаемое устройство для прекращения неуправляемого движения модели летательного аппарата в отличие от известных устройств позволяет практически мгновенно прекратить неуправляемое движение модели, при этом не оказывает ударных нагрузок на модель и вплоть до срабатывания не влияет на обтекание потоком модели, что повышает точность испытаний.





Способ газолазерной резки крупногабаритных деталей из композиционных материалов и устройство для его осуществления
Полимерная композиция
Грунтовочная композиция
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Способ получения конъюгата нона-β-(1→3)-глюкозида с бычьим сывороточным альбумином скваратным методом
Износостойкий сплав на основе никеля для нанесения износо- и коррозионно-стойких покрытий на конструкционные элементы микроплазменным или сверхзвуковым газодинамическим напылением
Способ измерения температуры поверхности конструкции резистивным чувствительным элементом, устройство для его осуществления и способ изготовления устройства
Способ определения температурной характеристики резисторного чувствительного элемента, устройство для его осуществления и способ изготовления устройства
Устройство для измерения звукового давления
Устройство для измерения давления, температуры и теплового потока
Способ газолазерной резки крупногабаритных деталей из композиционных материалов и устройство для его осуществления
Полимерная композиция
Грунтовочная композиция
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Способ определения запасов устойчивости рулевого привода и устройство для его осуществления
Способ измерения температуры термопарами, измерительная информационная система для его осуществления и температурный переходник
Способ получения конъюгата нона-β-(1→3)-глюкозида с бычьим сывороточным альбумином скваратным методом
Износостойкий сплав на основе никеля для нанесения износо- и коррозионно-стойких покрытий на конструкционные элементы микроплазменным или сверхзвуковым газодинамическим напылением
Способ измерения температуры поверхности конструкции резистивным чувствительным элементом, устройство для его осуществления и способ изготовления устройства
Способ определения температурной характеристики резисторного чувствительного элемента, устройство для его осуществления и способ изготовления устройства

