Результат интеллектуальной деятельности: Мобильный робототехнический комплекс
Вид РИД
Изобретение
Изобретение относится к области робототехники, а именно к той ее части, где носитель, например гусеничное шасси, вместе с манипулятором представляет собой единый мобильный робототехнический комплекс (МРК) с автономным питанием и системой дистанционного управления, предназначенный для поиска, обнаружения, эвакуации или разрушения (уничтожения) подозрительных предметов на месте их обнаружения.
Изобретение может быть использовано: при ликвидации или предотвращении техногенных аварий; при работе с взрывоопасными предметами и веществами; при проведении химических, радиологических и других разведок. Кроме того, изобретение может быть использовано как внутрипроизводственное технологическое оборудование, где по условиям техники безопасности присутствие человека недопустимо, например, при запредельной загазованности, радиации, во враждебной для человека микробиологической среде и других подобных условиях.
Известна конструкция мобильного робототехнического комплекса МРК-25 - разработка НИИСМ и СКТБ МГТУ им. Баумана, 1995 г. Источник информации по МРК-25: - конструкторско-технологическая документация НИИСМ и СКТБ МГТУ им. Баумана, разработка 1995 г. Кроме этого, данная разработка известна из следующих публикаций: журнал «Специальная техника» №1-4, 2000 г. Цикл статей: «Технология применения мобильных дистанционно управляемых комплексов; журнал "Гражданская защита" №4, апрель 1998 г., стр. 9-12, статья - "Интуиция - опыт - расчет".
В МРК-25 гусеничное шасси выполнено с передним расположением приводных мотор-звездочек и с механизмами изменения геометрии гусеничных обводов. Внутри каждого гусеничного обвода смонтированы приводы перемещения ленивцев по высоте. Каждый ленивец имеет винтовую нажимную пружину. Пружина выполняет двойную роль: с одной стороны, она является непосредственно элементом, с помощью которого выполняется натяжение гусеничного обвода, а с другой - она является компенсатором при изменении геометрии гусеничных обводов.
Недостатками данного устройства являются то, что при бортовых поворотах шасси с поднятыми в крайнее верхнее положение ленивцами усилия винтовой нажимной пружины недостаточно, что приводит к образованию "петли" за приводными звездочками и ленивцами с последующим сбросом гусеничного обвода.
Ближайшим аналогом предлагаемого технического решения является мобильный робототехнический комплекс (патент РФ №2230683), содержащий гусеничное шасси с манипулятором, с блоками управления и энергетической установкой и пост дистанционного управления, при этом гусеничное шасси имеет дифференциальный механизм синхронного изменения величины клиренса и геометрии гусеничных обводов, включающий в себя подвижные бортовые синхронизаторы, поперечные траверсы и общий центральный привод. При этом на бортовых синхронизаторах ленивцы, блоки поддерживающих роликов и тележки опорных катков установлены так, что при повороте бортовых синхронизаторов длина гусеничных обводов остается неизменной, опорные катки, ленивцы и блоки поддерживающих роликов находятся во взаимодействии с внутренними поверхностями гусениц, а величина клиренса изменяется пропорционально углу поворота бортовых синхронизаторов.
Недостатками данного технического решения, взятого нами в качестве аналога, являются: применение дифференциального механизма синхронного изменения величины клиренса и геометрии гусеничных обводов с его передним (по ходу движения) расположением создает возможность "пробуксовки" на месте и к опрокидыванию МРК при движении вверх на лестничных маршах вследствие недостаточной опорной поверхности гусениц; также данное решение не позволяет использовать МРК на сложной местности, где требуется раздельная работа ленивцев.
Задачей настоящего технического решения является создание мобильного робототехнического комплекса с повышенной проходимостью и устойчивостью при минимальных габаритах мобильного робота по длине.
Поставленная задача решается тем, что МРК, содержащий мобильный робот (MP) с установленным на нем навесным оборудованием и пульт дистанционного управления, осуществляет синхронное и раздельное изменение геометрии гусеничных обводов каждого борта MP.
Технический результат достигается тем, что МРК, содержащий мобильный робот (MP) и пост дистанционного управления, при этом мобильный робот состоит из манипулятора с навесным оборудованием, устанавливаемым на гусеничное шасси в сборе, включающее соединенный с ходовой частью корпус, на котором с обоих бортов внутри замкнутого гусеничного обвода установлены приводные мотор-звездочки и механизм изменения геометрии гусеничного обвода и размещены кабельная катушка и антенно-фидерное устройство. При этом внутри каждого замкнутого гусеничного обвода на корпусе установлены по нижнему краю два опорных катка и балансирная тележка с катками, по верхнему краю - поддерживающий каток и упомянутый механизм изменения геометрии гусеничного обвода. С наружной стороны гусеничного обвода на корпусе шасси установлен кронштейн с прижимным катком, обеспечивающим сцепление гусеничного обвода с приводной мотор-звездочкой. При этом механизм изменения геометрии гусеничного обвода состоит из линейного привода с подвижным штоком, соединенным с ленивцем, на одном конце которого установлена роликовая опора, а на другом механизм натяжения с опорным катком, выполненные с возможностью постоянного контакта с гусеничным обводом посредством подпружиненного штока механизма натяжения. При этом линейный привод, ленивец и балансирная тележка установлены на осях и шарнирно закреплены на корпусе с возможностью качения относительно этих осей.
Конструктивно МРК состоит из MP и поста дистанционного управления (ПДУ), связь между которыми осуществляется по командно-информационному кабелю или по радиолинии. MP (фиг. 1) представляет собой транспортное средство, предназначенное для выполнения различных технологических операций при дистанционном управлении с ПДУ (ПДУ на фиг. не показан) оператором в командном режиме. Установленная система дистанционного управления позволяет управлять MP и навесным оборудованием, производить обмен данными между MP и ПДУ, выводить информацию на монитор ПДУ. Конструктивно система дистанционного управления делится на пультовую и бортовую части. Пультовая часть монтируется на ПДУ и предназначена для задания команд управления, формирования командных посылок и преобразования их в код для передачи по кабелю или по радиолинии. Задание команд управления осуществляется с помощью ручек управления, переключателей и кнопок, расположенных на лицевой панели ПДУ. Бортовая часть монтируется в шасси и манипуляторе MP, предназначена для приема сигналов управления, их обработки и распределения по соответствующим исполнительным устройствам и механизмам.
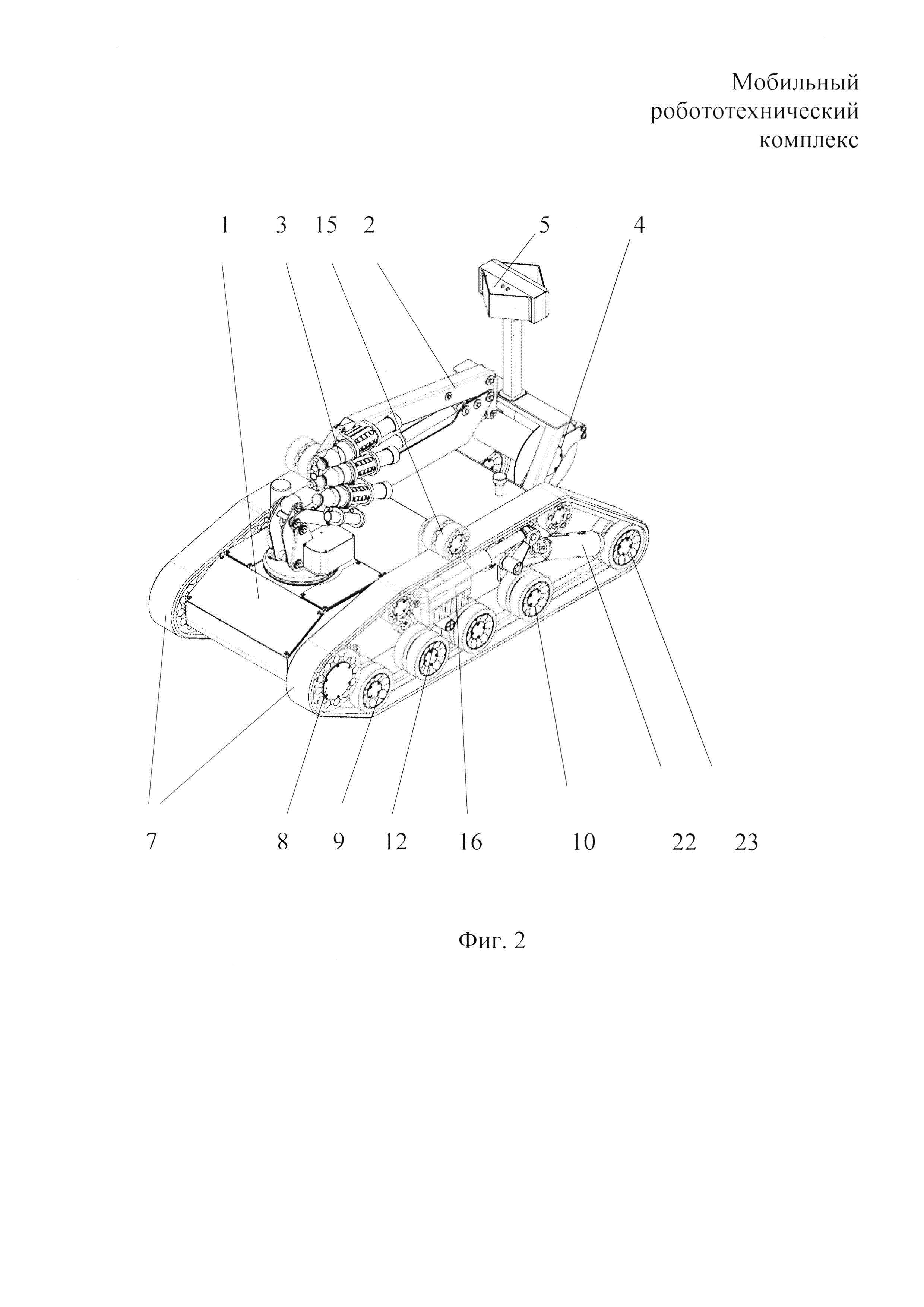
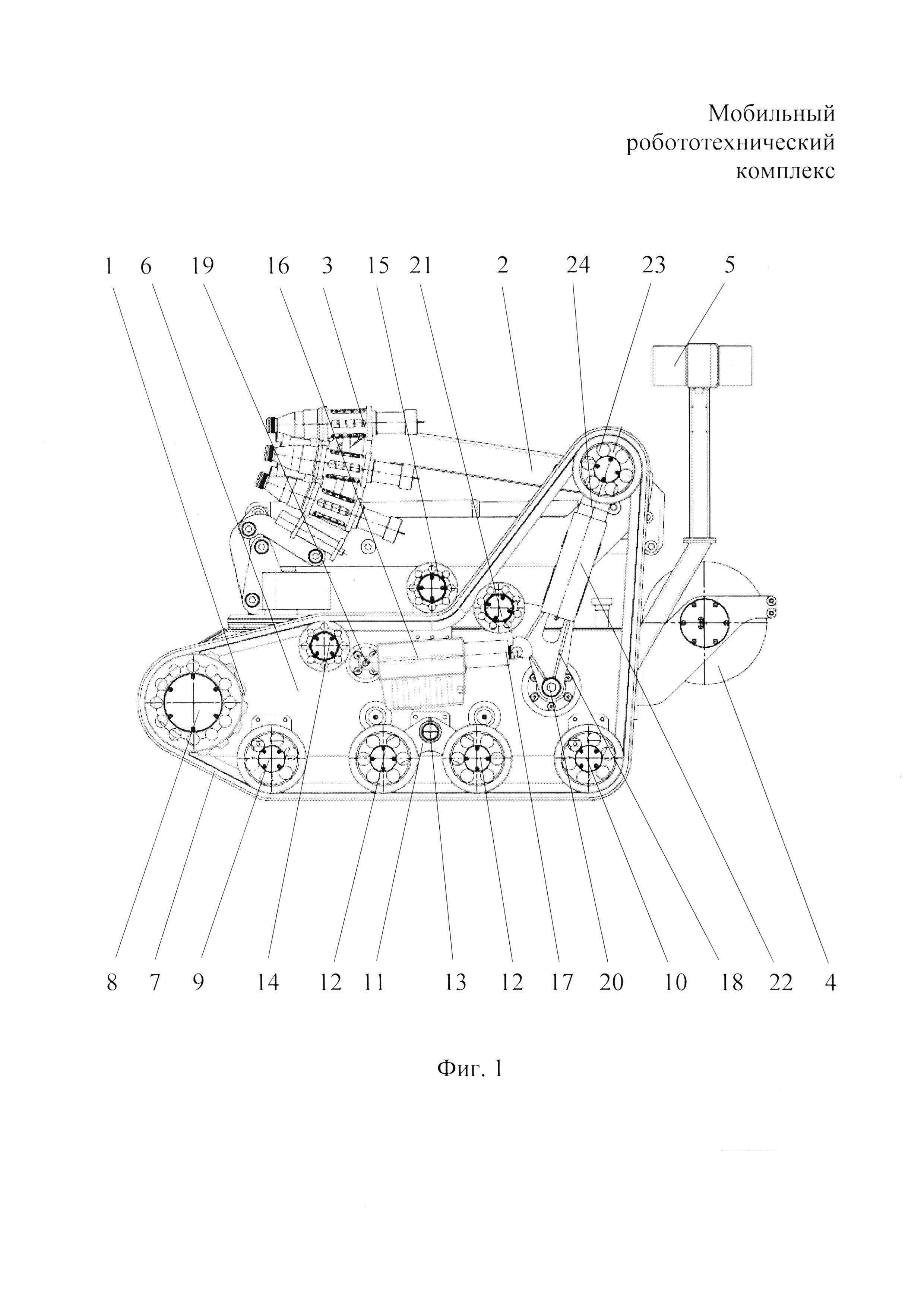
Конструкция MP по предлагаемому изобретению поясняется чертежами, где на фиг. 1 изображен мобильный робот, гусеничное шасси изображено с ленивцем в верхнем крайнем положении; на фиг. 2 - гусеничное шасси MP с ленивцем в нижнем крайнем положении.
MP содержит гусеничное шасси 1 в сборе, на которое устанавливают манипулятор 2 (на фиг. 1 манипулятор изображен в транспортном положении) с навесным оборудованием 3, устанавливаемым в зависимости от проведения требуемых работ, кабельную катушку 4 и антенно-фидерное устройство 5, соединяемые с бортовой частью системы дистанционного управления (на фиг. 1 не показана). Гусеничное шасси 1 в сборе, включающее соединенный с ходовой частью корпус 6, на который с обеих сторон внутри замкнутых гусеничных обводов 7 в передней части установлены приводные мотор-звездочки 8, по нижнему краю опорные катки 9 и 10 и балансирная тележка 11 с катками 12, закрепленная с возможностью покачивания на оси 13, по верхнему краю - поддерживающий каток 14 и механизм изменения геометрии гусеничного обвода. С наружной стороны гусеничного обвода 7 на корпусе 6 устанавливают кронштейн с прижимным катком 15.
Механизм изменения геометрии гусеничного обвода состоит из линейного привода 16 с подвижным штоком 17, который соединен с ленивцем 18. Линейный привод 16 закреплен с возможностью качения на оси 19. Ленивец 18 шарнирно закрепляют с возможностью качения в вертикальной плоскости на оси 20. На одном конце ленивца 18 установлена роликовая опора 21, а на другом механизм натяжения 22 с опорным катком 23. Механизм натяжения 22 представляет собой цилиндр с подпружиненным штоком 24, за счет этого роликовая опора 21 и опорный каток 23 механизма натяжения 22 постоянно находятся в контакте с гусеничным обводом 7.
Прижимной каток 15 предназначен для лучшего сцепления гусеничного обвода 7 с приводной мотор-звездочкой 8 при поднятых ленивцах 18, а также исключает сход гусеничного обвода 7 в момент поворота (разворота) MP.
MP и пост дистанционного управления содержат энергетические установки, например аккумуляторы, блоки электроавтоматики и телемеханики и блоки ЭВМ, на графических изображениях которые не показаны, но ссылки, на которые будут осуществляться в процессе описания работы МРК в динамике.
Работа MP происходит следующим образом. По команде с поста дистанционного управления по командно-информационному кабелю через кабельную катушку 4 либо по радиолинии через антенно-фидерное устройство 5 код команды поступает в автономные блоки бортовой части системы дистанционного управления. В зависимости от кода команды приводятся в действие соответствующие механизмы: мотор-звездочка 8, исполнительные механизмы манипулятора 2, механизм изменения геометрии гусеничных обводов и другие механизмы.
Для движения и маневрирования MP служат расположенные по бортам гусеничного шасси 1 в передней части мотор-звездочки 8, вращающие гусеничные обводы 7. Направление движения и поворот MP (вплоть до разворота на месте) осуществляется путем изменения относительных скоростей и направлений вращения мотор-звездочек 8.
При поступлении команды на механизм изменения геометрии гусеничных обводов включается линейный привод 16, за счет поступательного движения шток 17 начинает перемещаться, в сторону линейного привода 16 либо от него (шток 17 работает на растяжение). И взаимодействуя с ленивцем 18, движение передается через механизм натяжения 22 на опорный каток 23, который перемещается по гусеничному обводу 7, уменьшая или увеличивая опорную поверхность MP.
При изменении геометрии гусеничных обводов увеличивается опорная и профильная проходимость MP (преодоление уступов, уклонов и подъемов), а также повышается продольная устойчивость MP особенно при выполнении взрывотехнических работ с помощью манипулятора. Изменение геометрии гусеничного обвода дает возможность маневрирования MP в ограниченных пространствах (лестничные марши, дверные проемы и т.д.).
Мобильные робототехнические комплексы, в которых в качестве движителя используются гусеничные шасси, обладают всеми достоинствами и недостатками, которые присущи любым машинам на гусеничном ходу.
Вопросы проходимости и устойчивости являются первостепенными. Поэтому предложенная конструкция МРК с гусеничным шасси, имеющая в своем составе манипулятор, который в процессе работы создает дополнительные трудности, т.к. постоянно изменяет момент опрокидывания, смещает центр тяжести, в зависимости от поднимаемого груза изменяет удельное давление на опорную поверхность, особенно актуально для работы в экстремальных ситуациях. То есть изменение площади опорной поверхности за счет изменения геометрии гусеничных обводов значительно увеличивает надежность всей системы, живучесть и вероятность выполнения поставленной задачи, обладает более высоким КПД и, следовательно, более высоким запасом хода - временным рабочим запасом.
Мобильный робототехнический комплекс, содержащий мобильный робот и пост дистанционного управления, при этом мобильный робот состоит из манипулятора с навесным оборудованием, устанавливаемым на гусеничное шасси в сборе, включающее соединенный с ходовой частью корпус, на котором с обоих бортов внутри замкнутого гусеничного обвода установлены приводные мотор-звездочки и механизм изменения геометрии гусеничного обвода и размещены кабельная катушка и антенно-фидерное устройство, соединенные с бортовой частью системы дистанционного управления, отличающийся тем, что внутри каждого замкнутого гусеничного обвода на корпусе установлены по нижнему краю два опорных катка и балансирная тележка с катками, по верхнему краю - поддерживающий каток и упомянутый механизм изменения геометрии гусеничного обвода, с наружной стороны гусеничного обвода на корпусе шасси установлен кронштейн с прижимным катком, обеспечивающим сцепление гусеничного обвода с приводной мотор-звездочкой, при этом механизм изменения геометрии гусеничного обвода состоит из линейного привода с подвижным штоком, соединенным с ленивцем, на одном конце которого установлена роликовая опора, а на другом механизм натяжения с опорным катком, выполненные с возможностью постоянного контакта с гусеничным обводом посредством подпружиненного штока механизма натяжения, при этом линейный привод, ленивец и балансирная тележка установлены на осях и шарнирно закреплены на корпусе с возможностью качения относительно этих осей.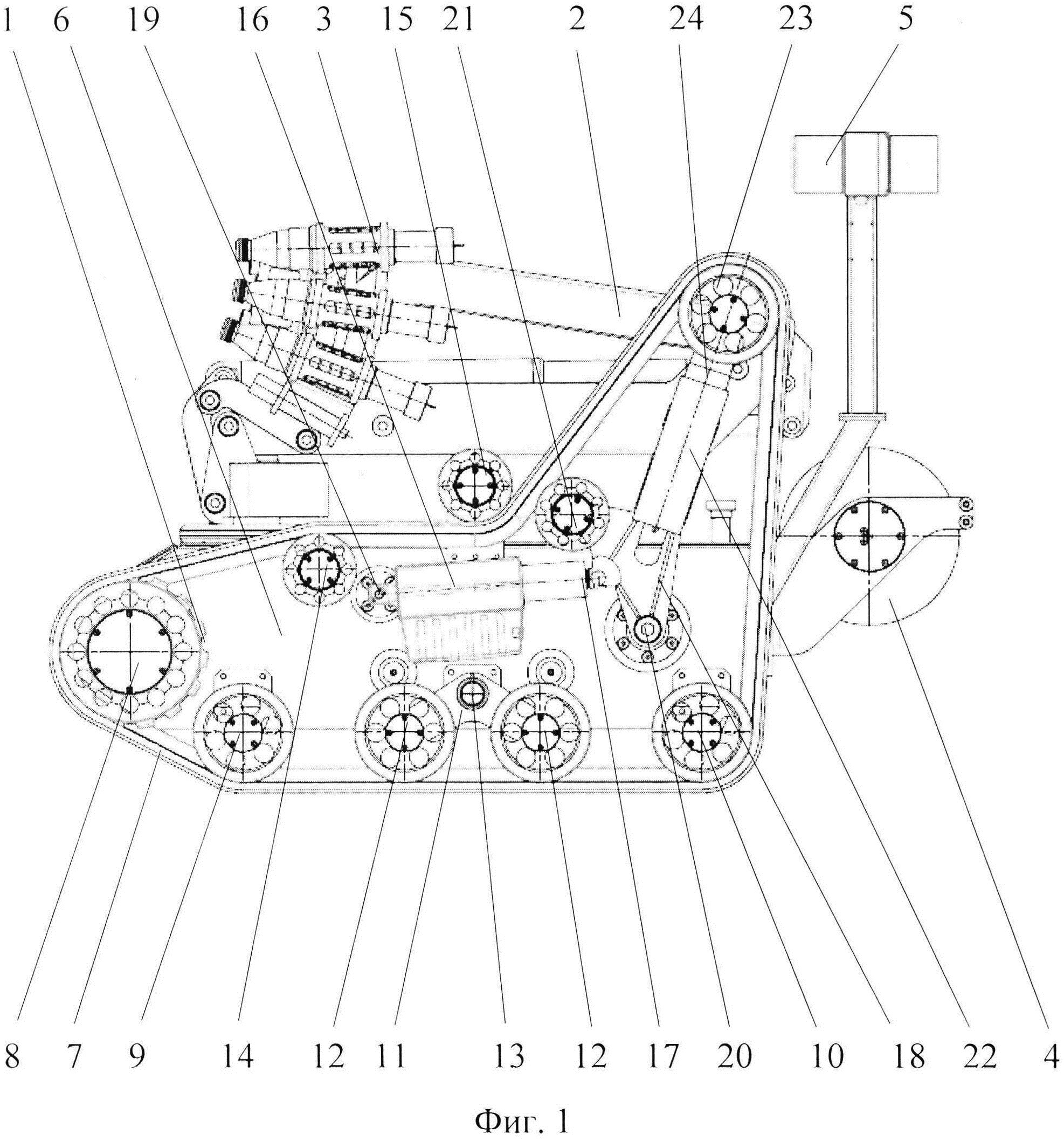
Способ управления процессом закачки рабочего агента для поддержания давления среды в многопластовой скважине
Способ одновременно-раздельной закачки рабочего агента, установка и регулирующее устройство для его реализации
Система передачи телеметрической информации и модуль погружной
Устройство мониторинга состояния кабеля
Способ коммутации блоков датчиков телеметрической системы передачи информации
Ретранслятор и конвертер радиосигналов
Оптико-электронное устройство и способ юстировки параллельности оптических осей компонентов оптико-электронного устройства
Приемопередающая антенная система
Многолучевая передающая активная фазированная антенная решетка
Способ определения расхода жидкости и вихревой расходомер для его осуществления
Блок вычислителя
Локомотивная система обеспечения безопасности движения поездов
Модуль погружной (варианты) и система передачи питания (варианты)
Устройство защиты источника питания постоянного тока
Устройство коммутации с контролем состояния и способ контроля состояния устройства коммутации
Радиостанция
Манипулятор робота

