Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для измерения траектории движения транспортных средств и знакопеременных перемещений объектов.
Известно устройство для измерения скорости (см. авторское свидетельство СССР №626420, «Устройство для измерения скорости», В.Е. Волков, опубликованное 30.09.78, БИ №36, G01Р 7/00), содержащее датчик перемещения исследуемого объекта, датчик ускорения, сумматор, генератор тактовых импульсов и два интегратора, включенных последовательно между датчиком ускорения и сумматором. Один из выходов генератора подключен к датчику перемещения, к входам интеграторов и сумматору, а другой выход подключен к входу разрешения считывания сумматора.
Недостатком данного устройства является низкая точность измерения, так как технологический разброс характеристики датчика ускорения не компенсируется.
Известно устройство для измерения перемещений объекта (см. патент РФ 2018086, «Устройство для измерения перемещений объекта», А.Н. Петров, Г.П. Токарева, опубликованный 15.08.94 в БИ №15, G01С 21/16, 22/00), содержащее акселерометр с нормирующим преобразователем, подключенным к интегратору, вычислитель, компаратор, последовательно соединенные синхронный выпрямитель, преобразователь напряжения в частоту, реверсивный счетчик, регистр и интерфейс, соединенный с вычислителем. Вход интегратора подключен к входам синхронного выпрямителя и компаратора, выход которого соединен с управляющими входами синхронного выпрямителя и реверсивного счетчика. Соответствующие выходы интерфейса подключены к входу разрешения записи регистра и входу обнуления реверсивного счетчика.
Недостатком данного устройства является низкая точность измерения, так как технологический разброс характеристики датчика ускорения не компенсируется. Кроме того, аналоговые устройства (нормирующий преобразователь, интегратор, компаратор, синхронный выпрямитель, преобразователь напряжения в частоту) вносят свои составляющие в погрешность измерения.
Вышеуказанное устройство является наиболее близким по технической сущности к заявляемому устройству и поэтому выбрано в качестве прототипа.
Достигаемым техническим результатом является повышение точности измерения перемещений объекта.
Указанный технический результат достигается тем, что в устройстве для измерения перемещений объекта, содержащем акселерометр, реверсивный счетчик, регистр и вычислитель, новым является то, что дополнительно введены первое и второе входные буферные устройства, выходное буферное устройство, сумматор, триггер знака, логический элемент ИЛИ, резисторы привязки, первая и вторая группы диодов, причем катоды диодов одной труппы попарно объединены с катодами соответствующих диодов другой группы и соединены через соответствующие резисторы привязки с минусовой шиной питания и с соответствующими входами второго входного буферного устройства, группа выходов которого соединена с первой группой входов сумматора и группой информационных входов регистра, группа выходов которого соединена с первой группой информационных входов вычислителя, вторая группа информационных входов которого соединена с группой выходов реверсивного счетчика, группа информационных входов которого соединена с группой выходов сумматора, вторая группа входов которого является группой поступления кода номинальной нулевой частоты акселерометра, выход которого через первое входное буферное устройство соединен с первым входом логического элемента ИЛИ, второй вход которого соединен с первым выходом вычислителя, а выход соединен со счетным входом реверсивного счетчика, управляющий вход которого соединен с входом вычислителя и с выходом триггера знака, S-вход которого соединен с выходом реверсивного счетчика, а R-вход - с входом записи реверсивного счетчика, со вторым входом вычислителя и с первым входом второго входного буферного устройства, второй вход которого соединен со входом записи регистра и с третьим выходом вычислителя, первый и второй выходы второго входного буферного устройства соединены соответственно с анодами диодов первой и второй групп.
Указанная совокупность существенных признаков позволяет повысить точности измерения траектории перемещения объекта за счет компенсации технологического разброса характеристики акселерометра и использования цифрового метода обработки показаний акселерометра.
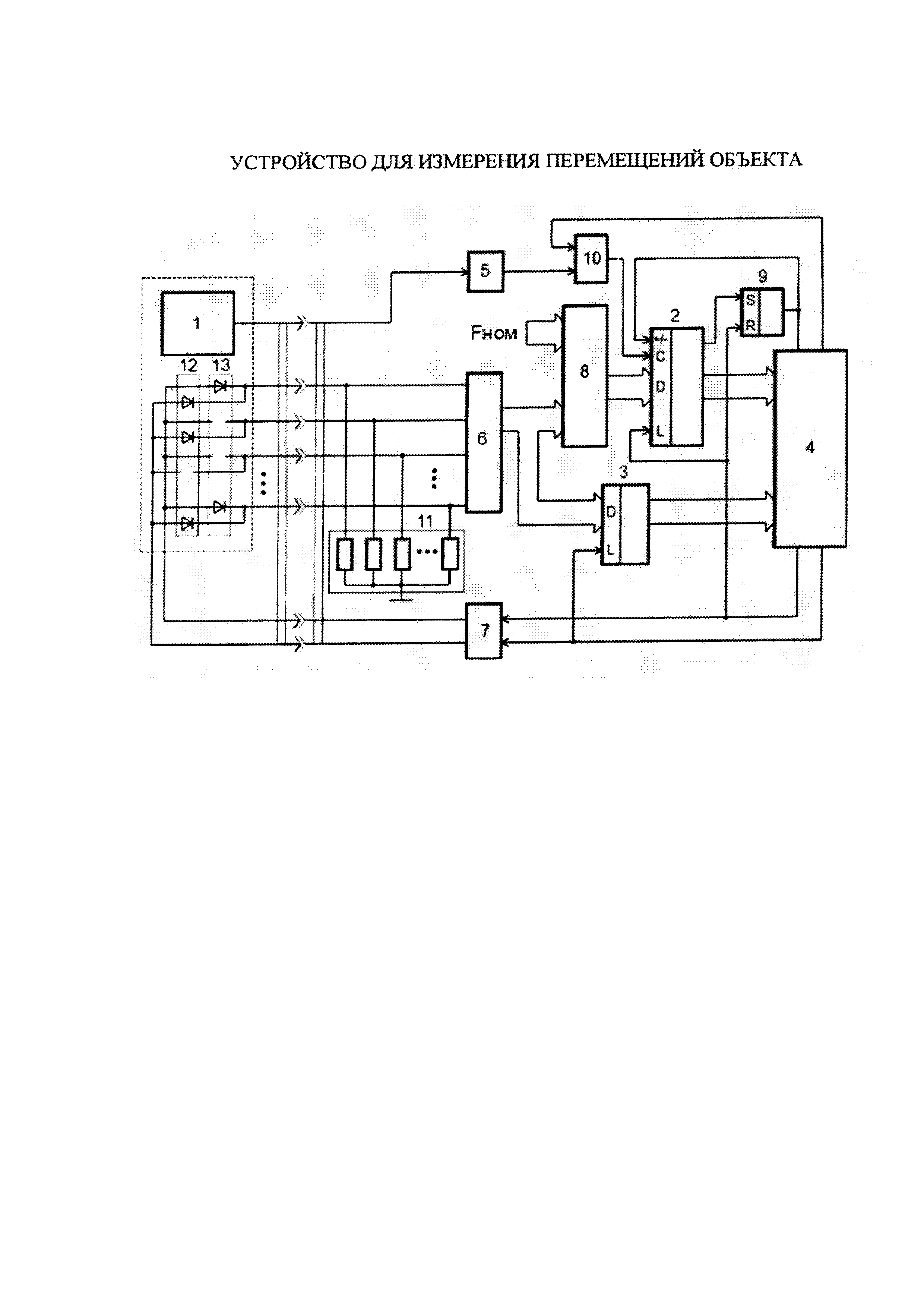
На фигуре приведена схема устройства для измерения перемещений объекта.
Устройство для измерения перемещений объекта содержит акселерометр 1, реверсивный счетчик 2, регистр 3, вычислитель 4, первое 5 и второе 6 входные буферные устройства, выходное буферное устройство 7, сумматор 8, триггер знака 9, логический элемент ИЛИ 10, резисторы привязки 11, первую 12 и вторую 13 группы диодов. Катоды диодов одной группы 12 попарно объединены с катодами соответствующих диодов другой группы 13 и соединены через соответствующие резисторы привязки 11 с минусовой шиной питания и с соответствующими входами второго входного буферного устройства 6, группа выходов которого соединена с первой группой входов сумматора 8 и группой информационных входов регистра 3, группа выходов которого соединена с первой группой информационных входов вычислителя 4, вторая группа информационных входов которого соединена с группой выходов реверсивного счетчика 2. Группа информационных входов реверсивного счетчика 2 соединена с группой выходов сумматора 8, вторая группа входов которого является группой поступления кода Fном номинальной нулевой частоты акселерометра 1. Выход акселерометра 1 через первое входное буферное устройство 5 соединен с первым входом логического элемента ИЛИ 10, второй вход которого соединен с первым выходом вычислителя 4, а выход соединен со счетным входом реверсивного счетчика 2. Управляющий вход реверсивного счетчика 2 соединен с входом вычислителя 4 и с выходом триггера знака 9, S-вход которого соединен с выходом реверсивного счетчика 2, а R-вход с - входом записи реверсивного счетчика 2, со вторым выходом вычислителя 4 и с первым входом выходного буферного устройства 7, второй вход которого соединен со входом записи регистра 3 и с третьим выходом вычислителя 4, первый и второй выходы выходного буферного устройства 7 соединены соответственно с анодами диодов первой 12 и второй 13 групп.
Устройство для измерения перемещений объекта (см. Фигуру) работает следующим образом.
После включения питания вычислителя 4 на его третьем выходе формируется импульс, который через выходное буферное устройство 7 поступает на аноды диодов первой группы 12. Указанные диоды (как и диоды второй группы 13) конструктивно расположены в корпусе акселерометра 1 и устанавливаются при изготовлении конкретного экземпляра акселерометра 1 в соответствии с кодом отклонения угла наклона, несущим информацию об отклонении угла наклона характеристики акселерометра от номинального значения. В разрядах группы, соответствующих единицам указанного кода, диоды устанавливаются, а в разрядах, соответствующих нулям, диоды не устанавливаются. Поэтому при появлении на анодах диодов первой группы 12 импульса на входах второго буферного устройства 6 появятся сигналы высокого уровня в тех разрядах, в которых диоды установлены. В разрядах, в которых диоды не установлены, останутся сигналы низкого уровня за счет резисторов привязки 11. Таким образом, на информационных входах регистра 3 появится код, несущий информацию об отклонении угла наклона характеристики акселерометра от номинального значения, который запишется в регистр 3 по заднему фронту импульса на третьем выходе вычислителя 4. После этого вычислитель 4 считывает указанный код и запоминает его в своем ОЗУ.
Диоды второй группы 13 устанавливаются при изготовлении акселерометра 1 в соответствии с кодом отклонения частоты, несущим информацию об отклонении нулевой частоты (которая формируется на выходе акселерометра 1, когда ускорение а=0) от номинального значения Fном. После приема вычислителем 4 команды начала отсчета начинается процесс измерения перемещений объекта. На втором выходе вычислителя 4 формируется импульс, который через выходное буферное устройство 7 поступает на аноды диодов второй группы 13. Код отклонения частоты через второе буферное устройство 6 поступает на первую группу входов сумматора 8, на второй группе входов которого присутствует код Fном номинальной нулевой частоты, а на группе выходов - код фактической нулевой частоты акселерометра 1, который запишется в реверсивный счетчик 2 по заднему фронту импульса на втором выходе вычислителя 4. Одновременно данный импульс устанавливает в нулевое состояние триггер знака 9. На первом выходе вычислителя 4 присутствует высокий уровень напряжения, который блокирует прохождение импульсов с выхода акселерометра 1 через логический элемент ИЛИ 10 на счетный вход реверсивного счетчика 2.
До начала интервала измерения реверсивный счетчик 2 находится в состоянии, двоичный код которого соответствует фактической нулевой частоте акселерометра 1. Интервал измерения начинается с появлением на время tизм низкого уровня напряжения на первом выходе вычислителя 4. Импульсы с выхода акселерометра 1 через логический элемент ИЛИ 10 поступают на счетный вход реверсивного счетчика 2. Низкий уровень напряжения, поступающий с выхода триггера знака 9 на управляющий вход реверсивного счетчика 2, задает для него реверсивный режим работы. Число импульсов, которое пройдет на счетный вход счетчика 2 за время tизм, равно
где f частота акселерометра 1.
Если ускорение равно нулю (а=0), то к концу интервала измерения счетчик 2 окажется в нулевом состоянии. При этом состояние триггера знака 9 не имеет значения.
Если ускорение отрицательное (а<0, то есть происходит торможение объекта), то к концу интервала измерения счетчик 2 не дойдет до нулевого состояния и остановится в состоянии, двоичный код которого соответствует отклонению частоты акселерометра 1 от нулевой частоты, которое пропорционально абсолютной величине ускорения. При этом триггер знака 9 останется в нулевом состоянии, соответствующем знаку «минус».
Если ускорение положительное (а>0, то есть происходит ускорение объекта), то за время интервала измерения счетчик 2 пройдет нулевое состояние и по S-входу переключит триггер знака 9 в единичное состояние. При этом режим работы счетчика 2 изменится на режим прямого счета. К концу интервала измерения счетчик 2 остановится в состоянии, двоичный код которого соответствует отклонению частоты акселерометра 1 от нулевой частоты, которое пропорционально абсолютной величине ускорения. При этом триггер знака 9 будет находиться в единичном состоянии, соответствующем знаку «плюс».
После завершения интервала измерения вычислитель 4 считывает состояния реверсивного счетчика 2 и триггера знака 9 и производит итерацию двойного интегрирования. В результате первого интегрирования получается значение текущей скорости объекта, а в результате второго интегрирования - текущее значение перемещения объекта.
Далее происходит циклическое повторение установки реверсивного счетчика 2 и триггера знака 9 в исходное состояние» измерения текущего значения ускорения и следующей итерации вычисления скорости и перемещения объекта.
Заявляемое техническое решение позволяет существенно снизить себестоимость устройства измерения перемещений объекта, так как, во-первых, отпадает необходимость использования дорогостоящего прецизионного акселерометра для обеспечения высокой точности измерения, во-вторых, расширение допусков технологического разброса нулевой частоты и угла наклона характеристики акселерометра сводит практически к нулю количество отбракованных акселерометров.
Проведено макетирование устройства для измерения перемещений объекта с использованием микросхемы БМК 5517БЦ2У, диодов 2Д510А и резисторов С2-33Н. Испытания макета подтвердили работоспособность заявляемого устройства и его практическую ценность.
Устройство для измерения перемещений объекта, содержащее акселерометр, реверсивный счетчик, регистр и вычислитель, отличающееся тем, что дополнительно введены первое и второе входные буферные устройства, выходное буферное устройство, сумматор, триггер знака, логический элемент ИЛИ, резисторы привязки, первая и вторая группы диодов, причем катоды диодов одной группы попарно объединены с катодами соответствующих диодов другой группы и соединены через соответствующие резисторы привязки с минусовой шиной питания и с соответствующими входами второго входного буферного устройства, группа выходов которого соединена с первой группой входов сумматора и группой информационных входов регистра, группа выходов которого соединена с первой группой информационных входов вычислителя, вторая группа информационных входов которого соединена с группой выходов реверсивного счетчика, группа информационных входов которого соединена с группой выходов сумматора, вторая группа входов которого является группой поступления кода номинальной нулевой частоты акселерометра, выход которого через первое входное буферное устройство соединен с первым входом логического элемента ИЛИ, второй вход которого соединен с первым выходом вычислителя, а выход соединен со счетным входом реверсивного счетчика, управляющий вход которого соединен с входом вычислителя и с выходом триггера знака, S-вход которого соединен с выходом реверсивного счетчика, а R-вход - с входом записи реверсивного счетчика, со вторым выходом вычислителя и с первым входом выходного буферного устройства, второй вход которого соединен со входом записи регистра и с третьим выходом вычислителя, первый и второй выходы выходного буферного устройства соединены соответственно с анодами диодов первой и второй групп.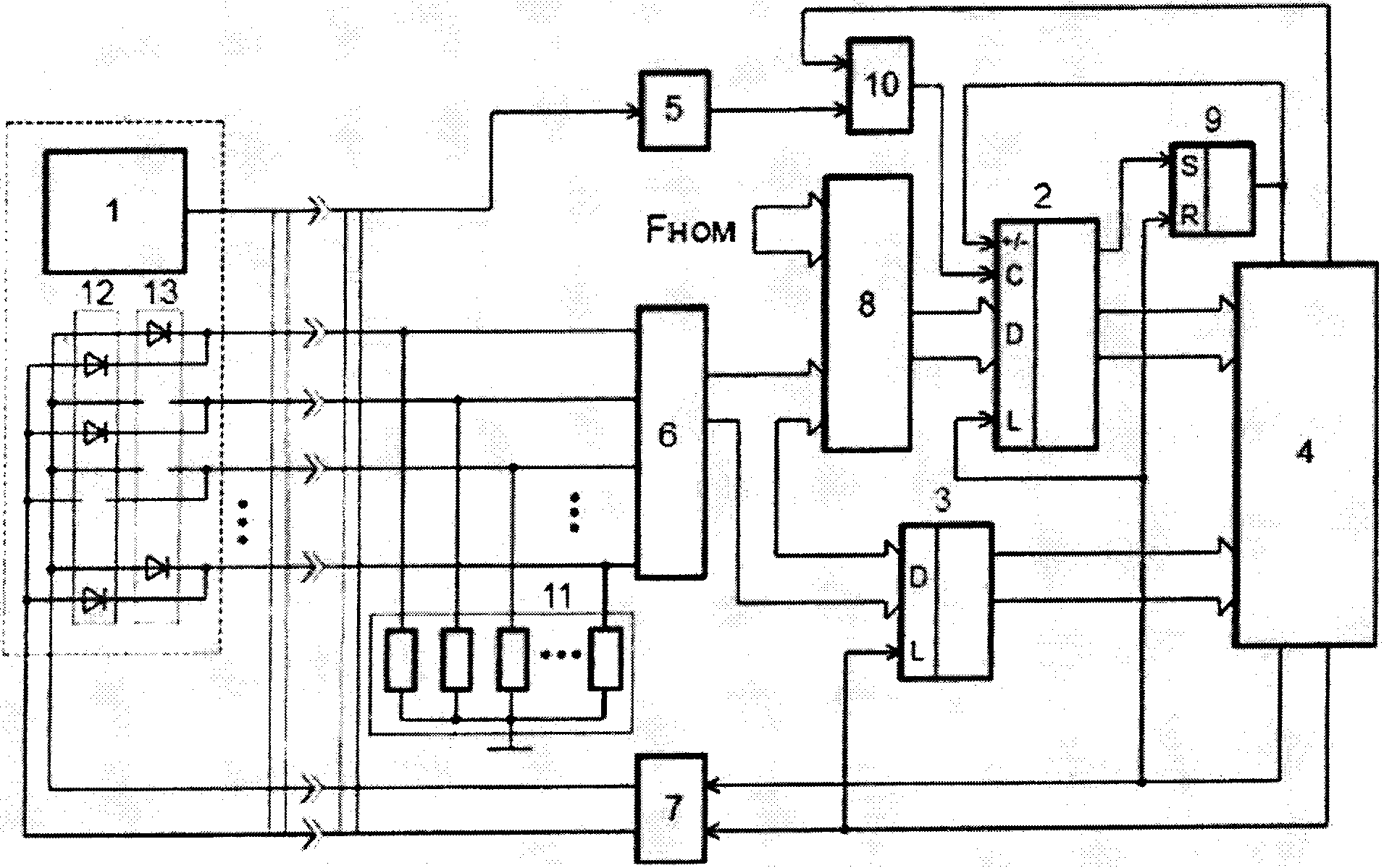
Способ изготовления полых микросфер из вспучивающегося порошкового материала
Формирователь меток времени
Дифференциальный измерительный преобразователь
Генератор высоковольтных импульсов с оптическим управлением
Гидропривод
Субнаносекундный ускоритель электронов
Устройство для перемотки ленточного сверхпроводника
Система управления неустойчивостью внутреннего срыва плазмы в режиме реального времени в установках типа токамак
Оптическая система наведения
Энергонезависимый транспондер
Несимметричный триггер

