Результат интеллектуальной деятельности: УПРАВЛЕНИЕ С ОБРАТНОЙ СВЯЗЬЮ ПОЛОЖЕНИЕМ ОТКЛОНИТЕЛЯ В ХОДЕ БУРЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Описанные варианты реализации изобретения, в целом, относятся к способам обеспечения проводки скважины при операциях направленного бурения и, в частности, к способу определения отхода угла положения отклонителя во время бурения.
УРОВЕНЬ ТЕХНИКИ
Использование автоматизированных способов бурения становится все более распространенным при бурении подземных стволов скважин. Например, данные способы могут использоваться для управления направлением бурения на основании различных измеренных в скважине данных обратной связи, таких как измеренные значения угла наклона и азимута, которые были измерены во время бурения, или каротажа во время бурения.
Одной из проблем, связанных с автоматизированными способами бурения (и способами направленного бурения в целом), является то, что инструменты для направленного бурения обнаруживают тенденцию к бурению (или изменению направления) в направлении, смещенном от выбранного в данной точке направления. Например, в случае бурения прямолинейной горизонтальной скважины некоторые буровые инструменты могут иметь тенденцию к отходу от угла наклона (изменению направления вниз) и/или к изменению направления влево или вправо. Данные тенденции усложняют задачу и могут быть вызваны рядом факторов, а также могут привести к неожиданным изменениям во время буровых работ. Факторы, влияющие на тенденцию изменения направления, могут включать, например, свойства подземного пласта, конфигурацию низа компоновки бурильной колонны (КНБК), износ долота, отход долота/стабилизатора, незапланированную точку касания (например, из-за сжатия или изгиба КНБК), взаимодействие стабилизатора с породой, отклоняющий механизм, используемый в отклоняющем инструменте, а также различные параметры бурения.
При выполнении текущих буровых операций оператор буровой установки обычно корректирует тенденцию к отклонению от заданного направления с помощью оценки переданных на поверхность данных скважинных исследований. Вычисления гравитационной ориентации отклонителя в скважине обычно выполняются на поверхности с интервалами от 9,144 м (30 футов) до 30,48 м (100 футов) (например, в станциях для статических скважинных исследований). В то время как данные методы являются эффективными, существует необходимость в дальнейшем улучшении, в частности, с целью аккомодации (или коррекции) данных тенденций в скважине при бурении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Описан способ управления положением отклонителя в ходе бурения в подземном стволе скважины с обратной связью. Способ включает получение эталонных и измеренных угловых положений подземного ствола скважины во время бурения, причем эталонные угловые положения измеряют с помощью верхней станции скважинных исследований, а измеренные угловые положения измеряют с помощью нижней станции скважинных исследований. Эталонные и измеренные угловые положения обрабатывают в стволе скважины во время бурения (с помощью скважинного процессора) для вычисления изменения угла подземного ствола скважины между верхней станцией для скважинных исследований и нижней станцией для скважинных исследований. Вычисленное изменение угла сопоставляют с заданным пороговым значением. Данный процесс могут непрерывно повторять до тех пор, пока изменение угла не окажется меньше порогового значения. Эталонное угловое положение и измеренное угловое положение дополнительно обрабатывают в скважине для вычисления угла положения отклонителя в случае, если изменение угла подземного ствола скважины больше или равно пороговому значению. Угол положения отклонителя затем могут дополнительно обрабатывать для управления направлением бурения подземного ствола скважины.
Данные варианты реализации изобретения могут иметь ряд технических преимуществ. Например, в описанных вариантах реализации изобретения предусмотрено управление положением отклонителя в ходе бурения с обратной связью в масштабе реального времени. Таким образом, благодаря описанным способам достигают улучшения размещения скважин, а также снижения искривления скважин. Кроме того, благодаря обеспечению управления с обратной связью с помощью описанных способов, как правило, повышают эффективность и последовательность бурения.
Данное краткое описание приводится для выбора концепций, которые дополнительно описаны ниже в подробном описании. Данное краткое описание не предназначено для идентификации ключевых или существенных признаков заявленного объекта изобретения, а также не предназначено для использования с целью ограничения объема заявленного объекта изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Для более полного понимания описанного объекта изобретения и его преимуществ приводятся ссылки на последующее описание, связанные с прилагаемыми графическими материалами, на которых:
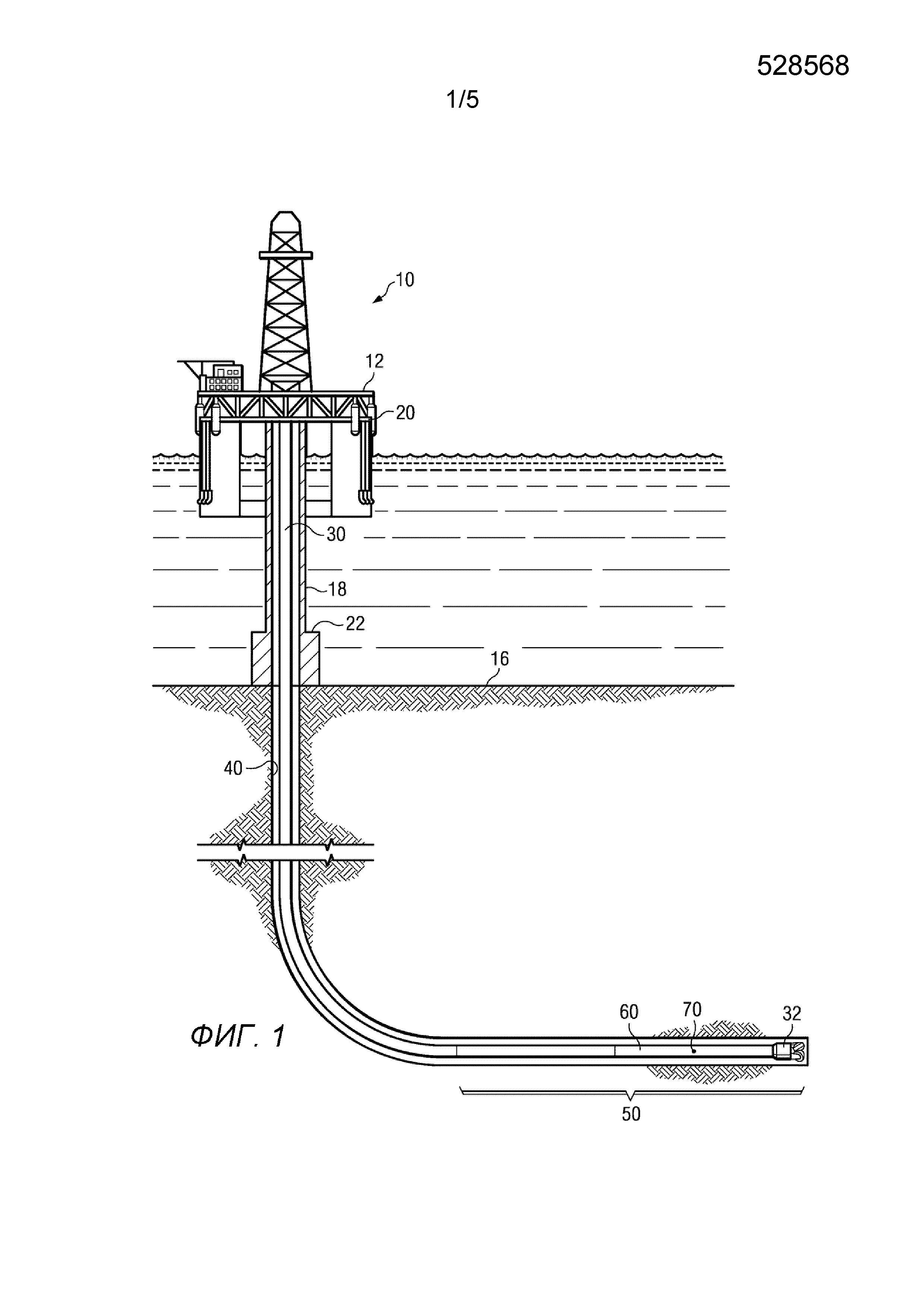
На Фиг. 1 проиллюстрирована типовая плавучая буровая установка, на которой могут использоваться описанные варианты реализации изобретения.
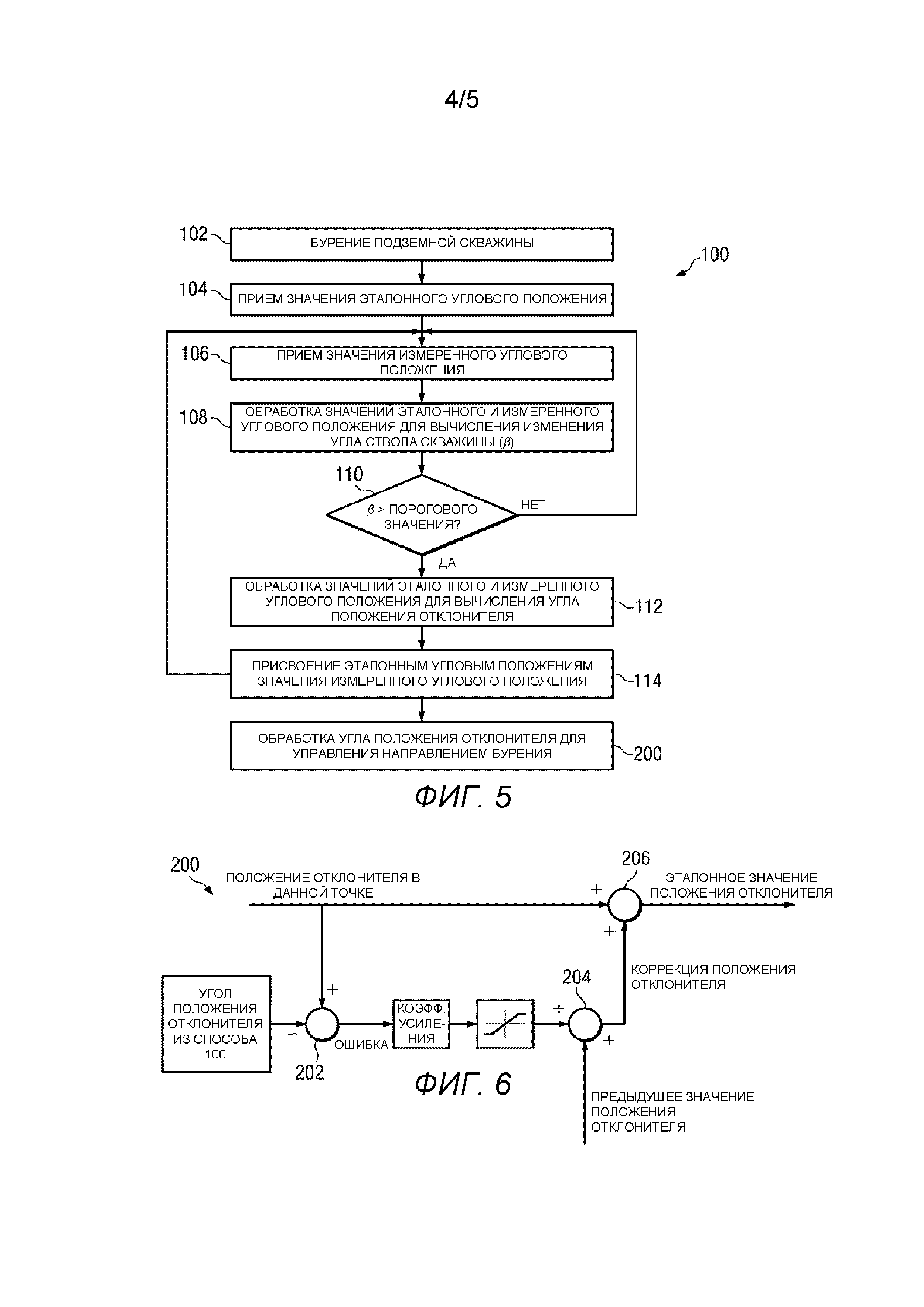
На Фиг. 2 проиллюстрирована нижняя часть КНБК (компоновки низа бурильной колонны), проиллюстрированной на Фиг. 1.
На Фиг. 3 проиллюстрирована схема, на которой представлены параметры углового положения и отклонения в координатах глобальной системы координат.
На Фиг. 4 проиллюстрирована схема, на которой представлена гравитационная ориентация положения отклонителя и ориентация положения отклонителя по магнитному северу в глобальной системе координат.
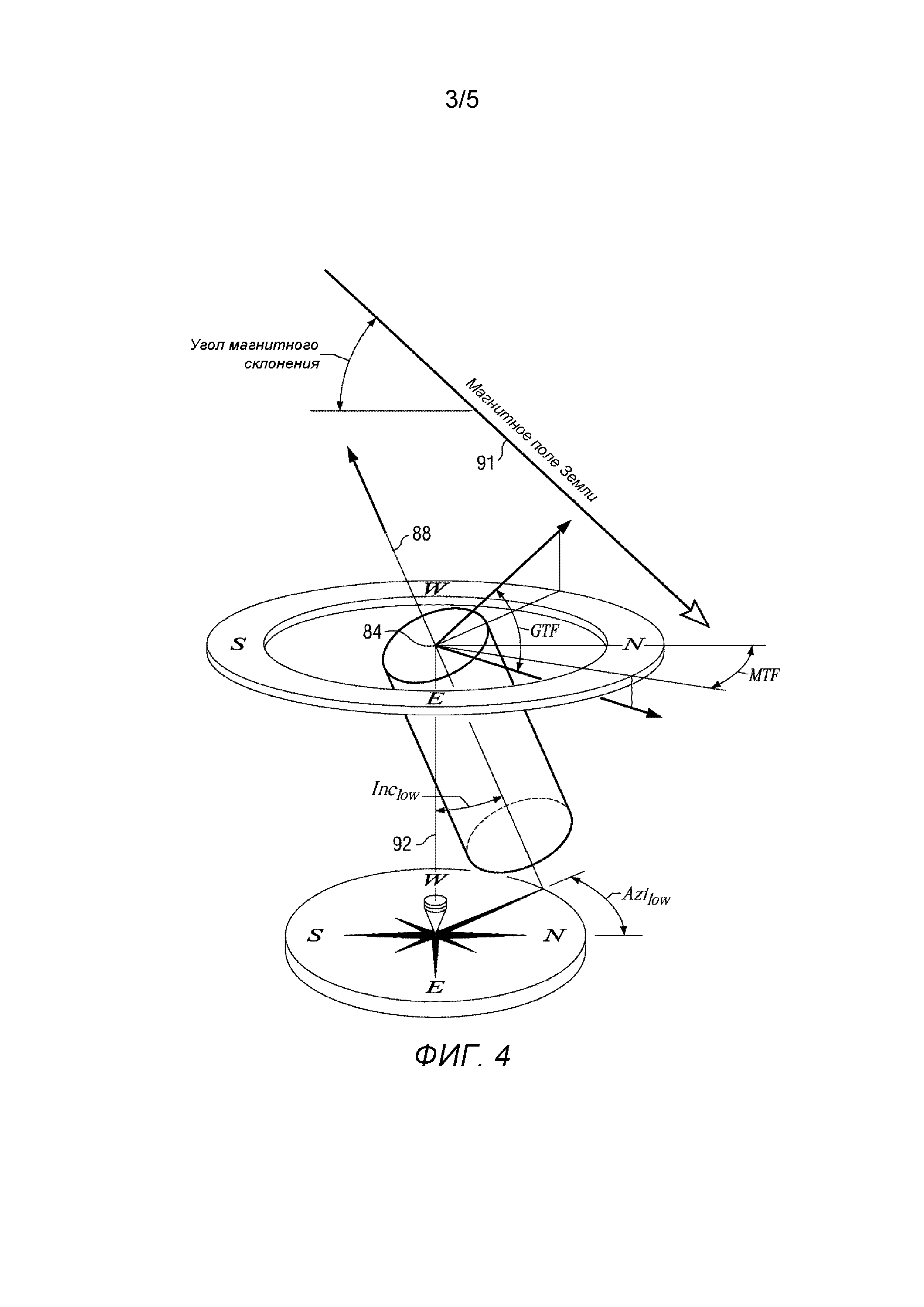
На Фиг. 5 проиллюстрирована блок-схема варианта реализации способа с обратной связью для получения данных положения отклонителя в ходе бурения.
На Фиг. 6 проиллюстрирован один из вариантов реализации регулятора, с помощью которого могут обрабатывать угол отклонения положения отклонителя, полученный с помощью способа, проиллюстрированного на Фиг. 5, для управления направлением бурения.
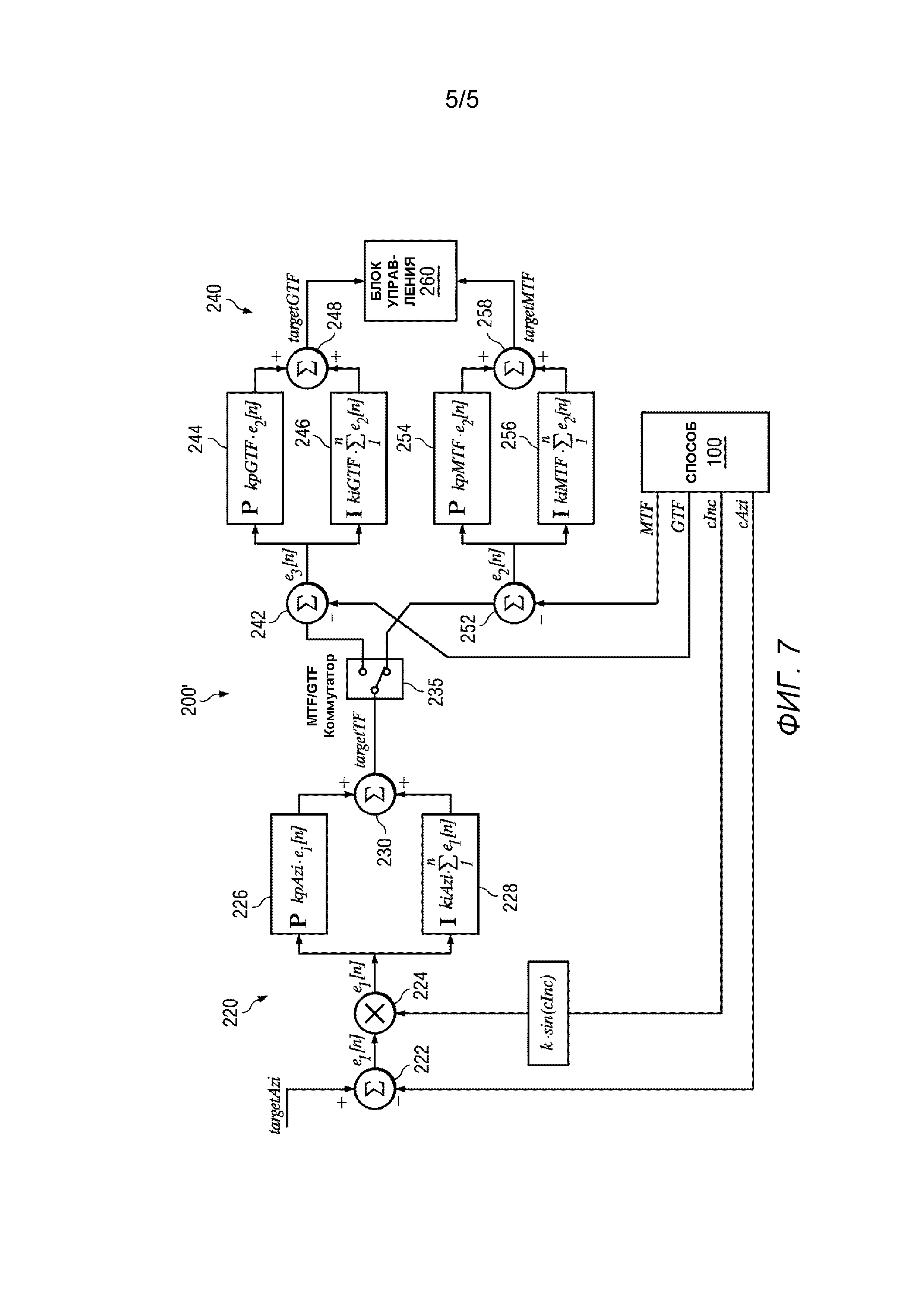
На Фиг. 7 проиллюстрирован каскадный регулятор, с помощью которого могут обрабатывать угол отклонения положения отклонителя, полученный с помощью способа, проиллюстрированного на Фиг. 5, для перемещения бурильного инструмента на определенный азимутальный угол.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 проиллюстрирована типовая плавучая буровая установка 10, применяемая для использования различных вариантов реализации способов и систем, описанных в данной заявке. Полупогружная буровая платформа 12 расположена над нефтяным или газовым пластом (не показан), находящимся ниже морского дна 16. Подводный трубопровод 18 простирается от палубы 20 платформы 12 к устьевой арматуре 22. Платформа может содержать вышку и подъемное устройство для подъема и спуска бурильной колонны 30, которая, как проиллюстрировано, простирается внутрь ствол скважины 40 и содержит компоновку низа бурильной колонны (КНБК) 50. КНБК 50 содержит буровое долото 32, отклоняющий инструмент 60 (также называемый направленным бурильным инструментом), и один или более скважинных навигационных датчиков 70, таких как датчики для измерений во время бурения, содержащие трехосные акселерометры и/или трехосные магнитометры. КНБК 50 может дополнительно содержать практически любые подходящие скважинные инструменты, например, винтовой забойный двигатель, скважинную телеметрическую систему, расширитель ствола скважины и т.д. Описанные варианты реализации изобретения не ограничивают использование других подобных инструментов.
Следует иметь в виду, что КНБК может содержать практически любой приемлемый отклоняющий инструмент 60, например, включая инструмент для наклонно-направленного бурения роторным способом. Различные конфигурации инструментов для наклонно-направленного бурения роторным способом известны в данной области техники и содержат различные отклоняющие механизмы для управления направлением бурения. Например, многие существующие инструменты для наклонно-направленного бурения роторным способом содержат практически неподвижный наружный корпус с лопастями, которые взаимодействуют со стенкой ствола скважины. При взаимодействии лопастей со стенкой ствола скважины корпус инструмента направляется эксцентрично, тем самым ориентируя или отклоняя буровое долото во время бурения в требуемом направлении. Расположенный в наружном корпусе вращающийся вал передает во время бурения вращательную энергию и осевую нагрузку на долото буровому долоту. Наборы акселерометра и магнитометра могут размещаться в наружном корпусе, и поэтому не вращаются или медленно вращаются относительно стенки ствола скважины.
Роторно-управляемые системы PowerDrive® (предлагаемые Schlumberger) полностью вращаются вместе с бурильной колонной (т.е. наружный корпус вращается вместе с бурильной колонной). В системе PowerDrive® XceedTM используется внутренний отклоняющий механизм, не требующий контакта со стенкой ствола скважины, который позволяет корпусу инструмента полностью вращаться вместе с бурильной колонной. В роторно-управляемых системах PowerDrive® X5, X6 и PowerDrive Orbit® для активации лопастей (или прижимных башмаков), контактирующих со стенкой ствола скважины, используют буровую грязь. Выдвижение лопастей (или прижимных башмаков) быстро и непрерывно регулируется при вращении системы в стволе скважины. В системе PowerDrive Archer® используется нижняя направляющая секция, соединенная с верхней секцией с помощью шарнирно-сочлененного вертлюга. Вертлюг активно поворачивают с помощью поршней таким образом, чтобы изменить угол нижней секции относительно верхней секции и поддерживать требуемое направление бурения при вращении компоновки низа бурильной колонны в стволе скважины. Наборы акселерометра и магнитометра могут вращаться вместе с бурильной колонной или, как вариант, могут располагаться в стабилизированном вращением корпусе таким образом, что наборы акселерометра и магнитометра остаются практически неподвижными (в фазе смещения) или медленно вращаются относительно ствола скважины (в нейтральной фазе). Для бурения скважины требуемой кривизны фаза смещения и нейтральная фаза периодически сменяют друг друга при бурении с заданным соотношением (называемым временем направленного бурения). При этом описанные варианты реализации изобретения не ограничиваются использованием какой-либо конкретной конфигурации отклоняющего инструмента.
В скважинных датчиках 70 может использоваться практически любое подходящее расположение датчиков, с помощью которых производят скважинные навигационные измерения (измерения угла наклона ствола скважины, азимута ствола скважины и/или угла положения отклонителя). Данные датчики могут включать, например, акселерометры, магнитометры, гироскопы и т.п. Расположение данных датчиков хорошо известно в данной области техники и по этой причине нет необходимости в подробном описании. Описанные варианты реализации изобретения не ограничиваются использованием каких-либо конкретных вариантов реализации или конфигураций. Способы проведения измерений угла наклона ствола скважины и азимута ствола скважины во время бурения в масштабе реального времени описаны, например, в принадлежащих одному и тому же правообладателю публикациях заявок на патент США №2013/0151157 и №2013/0151158. В описанном варианте реализации изобретения датчики 70 проиллюстрированы как размещенные в бурильной колонне 60. Данное описание приводится исключительно для удобства, поскольку датчики 70 могут быть расположены в любом месте КНБК.
Для специалистов в данной области техники будет очевидно, что размещение оборудования, проиллюстрированное на Фиг. 1, приводится исключительно в качестве примера. Далее будет понятно, что описанные варианты реализации изобретения не ограничиваются использованием полупогружной платформы 12, проиллюстрированной на Фиг. 1. Описанные варианты реализации изобретения в равной степени вполне пригодны для использования при подземных буровых работах любого типа, либо на шельфе, либо на суше.
На Фиг. 2 проиллюстрирована нижняя часть КНБК бурильной колонны 30, содержащая буровое долото 32 и отклоняющий инструмент 60. Как было проиллюстрировано выше применительно к Фиг. 1, отклоняющий инструмент может содержать навигационные датчики 70, включая навигационные датчики трехосного (три оси) акселерометра и магнитометра. Подходящие акселерометры и магнитометры могут быть выбраны из практически любых подходящих устройств, известных в данной области техники и имеющихся на рынке. На Фиг. 2 дополнительно проиллюстрировано схематическое представление наборов датчиков трехосного акселерометра и магнитометра. Трехосный подразумевает, что каждый набор датчиков содержит три взаимно перпендикулярных датчика, причем акселерометры обозначены как Ax, Ay и Az , а магнитометры обозначены как Bx, By и Bz. По определению, правовинтовой называется система, в которой оси z акселерометра и магнитометра (Az и Bz) ориентированы практически параллельно стволу буровой скважины, как проиллюстрировано (хотя описанные варианты реализации изобретения не ограничиваются данными определениями). Таким образом, каждый из наборов акселерометра и магнитометра может рассматриваться как определяющий плоскость (оси х и у) и полюс (ось z вдоль оси КНБК).
На Фиг. 3 проиллюстрирована схема, на которой представлены параметры углового положения в глобальной системе координат в первой и второй верхней и нижней станциях для скважинных исследований 82 и 84. Угловым положением КНБК определяется ориентация оси КНБК (оси 86 на верхней станции скважинных исследований 82 и оси 88 на нижней станции скважинных исследований 84) в трехмерном пространстве. В случае использования при скважинных исследованиях угловое положение ствола скважины представляет собой направление оси КНБК в координатах глобальной системы координат (и обычно понимают, что данное направление приблизительно совпадает с направлением движения бурового долота). Угловое положение может быть представлено единичным вектором, направление которого обычно определяется углом наклона и азимутом ствола скважины. На Фиг. 2 углу наклона ствола скважины в верхней и нижней станциях для скважинных исследований 82 и 84 соответствует Incвверх и Incвниз , в то время как азимуту ствола скважины соответствует Aziвверх и Aziвниз. Угол β соответствует общему изменению угла ствола скважины между первой и второй станциями для скважинных исследований 82 и 84.
На Фиг. 4 проиллюстрирована дополнительная схема углового положения и угла положения отклонителя в координатах глобальной системы координат во второй нижней станции скважинных исследований 84. Направления магнитного поля Земли и гравитационного поля проиллюстрированы как 91 и 92. Угол наклона ствола скважины Incвниз соответствует отклонению оси 88 от вертикали, при этом Aziвниз соответствует отклонению проекции оси 88 от магнитного севера на горизонтальную плоскость. Гравитационная ориентация положения отклонителя (GTF) является угловым отклонением по окружности скважинного инструмента какого-либо компонента инструмента относительно высокой стороны (HS) фланца для крепления инструментов (или ствола скважины). В данном описании гравитационная ориентация положения отклонителя (GTF) соответствует угловому отклонению между направлением вращения бурового долота и направлением высокой стороны (например, при бурении забойным двигателем, гравитационная ориентация положения отклонителя соответствует угловому отклонению между разметочной линией кривого переводника и направлением высокой стороны). Магнитная ориентация положения отклонителя (MTF) подобна GTF, но отличается тем, что в качестве начального направления используется магнитный север. В частности, MTF является угловым отклонением в горизонтальной плоскости между направлением вращения бурового долота и магнитным севером.
Следует иметь в виду, что описанные варианты реализации изобретения не ограничиваются вышеприведенными допущениями для определения координат ствола скважины, проиллюстрированных на Фиг. 2, 3 и 4. Следует также иметь в виду, что данные допущения могут оказывать влияние на вид определенных математических формул, приведенных в данном описании. Специалистам в данной области техники будет несложно использовать другие допущения, а также получать эквивалентные математические формулы.
На Фиг. 5 проиллюстрирована блок-схема варианта реализации способа 100 для получения данных угла отклонения положения отклонителя с обратной связью. В блоке 102 пробуривают подземную скважину, например, с помощью вращения бурильной колонны, прокачивания бурового раствора через забойный гидротурбинный двигатель, и т.п. Инструмент для наклонно-направленного бурения (отклоняющий инструмент) может также быть активирован таким образом, чтобы управлять направлением бурения (ориентацией бурения) и таким образом направлять буровое долото. В блоке 104 принимают эталонное значение углового положения. Эталонное значение углового положения может, например, включать ранее измеренное значение углового положения. В блоке 106 принимают измеренное значение углового положения. Эталонные и измеренные значения углового положения могут содержать величины угла наклона и азимута, измеренные с использованием практически любых приемлемых расположений датчиков, например, включая вышеуказанные акселерометрические, магнитометрические и гироскопические датчики. Эталонное значение углового положения может включать ранее измеренное значение углового положения, полученное от верхней станции скважинных исследований, при этом измеренное значение углового положения может включать текущее измеренное значение углового положения, полученное от нижней станции для скважинного исследования.
В блоке 108 обрабатывают эталонное и измеренное значение углового положения для вычисления общего изменения угла β ствола скважины между первой и второй станциями для скважинных исследований (см. Фиг. 3). Затем в блоке 110 угол β сопоставляют с заданным пороговым значением. В случае, если β меньше порогового значения, способ возвращается к блоку 106 и принимают следующее измеренное значение углового положения (значение углового положения, измеренное позже во время сопоставления с предыдущим измеренным значением углового положения) и затем заново вычисляют β в блоке 108. В случае, если β больше или равно пороговому значению в блоке 110, эталонное и измеренное значения углового положения дополнительно обрабатывают в блоке 112 для вычисления угла положения отклонителя (например, GTF и/или MTF) бурового долота (например, угол положения отклонителя в направлении вращения бурового долота). Затем вычисленный угол положения отклонителя дополнительно обрабатывают в блоке 200, как более подробно описано ниже со ссылкой на Фиг. 6 и 7 для управления направлением бурения. В блоке 114 эталонное значение углового положения (изначально полученное в блоке 104) сбрасывают таким образом, что данное значение равняется последнему измеренному значению углового положения, принятого в блоке 106. Затем способ циклически возвращается к блоку 106, и принимают другое измеренное значение углового положения и затем заново вычисляют β в блоке 108.
Значение углового положения в блоке 106 могут измерять, например, с помощью способов статического и/или непрерывного измерения угла наклона и азимута. Значения статического измерения могут быть получены, например, если бурение временно приостанавливают для добавления в бурильную колонну новой бурильной свечи. Значения непрерывного измерения могут быть получены, например, из соответствующих значений непрерывных измерений осевого компонента гравитационного и магнитного полей (Az и Bz на Фиг. 2) с помощью известных в данной области техники способов (например, описанных в публикации заявки на патент США №2013/0151157, содержание которой полностью включено в данную заявку посредством ссылки). С целью снижения влияния шумов значения непрерывного изменения угла наклона и азимута могут дополнительно отфильтровывать. Например, подходящий цифровой фильтр может включать фильтр с бесконечной импульсной характеристикой (БИХ) первого порядка. Данные алгоритмы фильтрации также известны специалистам в данной области техники, и нет необходимости в более детальном рассмотрении в данной заявке.
Эталонное и измеренное значения могут обрабатывать в блоке 108 для вычисления угла β между верхней и нижней станциями для скважинных исследований, как указано ниже:
QUOTE  (1)
(1)
где QUOTE  и QUOTE
и QUOTE  соответствует измеренному угловому положению (углу наклона и азимуту) и QUOTE
соответствует измеренному угловому положению (углу наклона и азимуту) и QUOTE  и QUOTE
и QUOTE  соответствует эталонному угловому положению (углу наклона и азимуту). При условии, что общее изменение угла скважины при непрерывном бурении, как правило, мало, в случае, если значение β мало (например, меньше 5 градусов), может быть сделано одно или более следующих приближений:
соответствует эталонному угловому положению (углу наклона и азимуту). При условии, что общее изменение угла скважины при непрерывном бурении, как правило, мало, в случае, если значение β мало (например, меньше 5 градусов), может быть сделано одно или более следующих приближений:
QUOTE  (2)
(2)
QUOTE  (3)
(3)
QUOTE  (4)
(4)
В случае проведения непрерывных (во время бурения) измерений углового положения значения непрерывных измерений азимута, как правило, имеют более высокий уровень шумов, в отличие от значений непрерывных измерений угла наклона. По этой причине Формулы 2-4 могут быть изменены для добавления весового коэффициента AW для снижения чувствительности к влиянию значений измерений азимута с более высоким уровнем шумов на общее изменение угла β.
QUOTE  (5)
(5)
QUOTE  (6)
(6)
QUOTE  (7)
(7)
при этом весовой коэффициент AW находится в диапазоне от 0 до 1 и может выбираться в зависимости от уровней шумов в измеренных значениях угла наклона и азимута. В некоторых вариантах реализации изобретения весовой коэффициент AW может находиться в диапазоне от около 0,1 до около 0,5 (хотя описанные варианты реализации изобретения не указывают на ограничения в данном отношении). Формулы 2-7 могут преимущественно использоваться в скважинном компьютере/процессоре, поскольку с их помощью сокращают число тригонометрических функций (вычисление которых требует использования значительных вычислительных ресурсов).
В блоке 110 могут использовать практически любое приемлемое пороговое значение, например, в диапазоне от около 0,25 до около 2,5 градуса. В целом увеличение порогового значения приводит к уменьшению ошибки значения положения отклонителя, которое вычисляют в блоке 112. В одном из вариантов реализации изобретения ошибка положения отклонителя находится в диапазоне около 5-10 градусов и может быть достигнута при использовании порогового значения 0,5 градуса. Использование порогового значения 1,0 градус может быть предпочтительным, поскольку дополнительно снижается ошибка положения отклонителя. Следует иметь в виду, что пороговое значение связано с кривизной отрезка ствола пробуриваемой скважины и пробуренным расстоянием. Например, при кривизне 5 градусов на 30,48 м (100 футов) ствола скважины пороговое значение 0,5 градуса соответствует пробуренному расстоянию 3,048 м (10 футов). По этой причине контур обратной связи, проиллюстрированный на Фиг. 5, можно фактически рассматривать практически как контроллер глубины области.
Следует также иметь в виду, что измеренное значение β может обрабатываться в стволе скважины для получения приблизительной скорости проходки ROP , например, как указано ниже:
QUOTE  (8)
(8)
где DLS представляет интенсивность искривления (кривизну) отрезка ствола пробуриваемой скважины и QUOTE  соответствует интервалу времени между проведением измерений в первой и второй верхней и нижней станциях для скважинных исследований. Данное оценочное значение ROP преимущественно используют, например, при планировании измерений датчика для непрерывных скважинных исследований в непосредственной близости от долота (или в других частях бурильной колонны). Имеется в виду, что могут вычисляться “статические” и/или практически непрерывные значения ROP . Например, статическое значение ROP может быть вычислено в блоке 112 при превышении β порогового значения. Практически непрерывные значения ROP могут вычисляться, например, в блоке 108 при вычислении β, таким образом получают практически мгновенную скорость проходки. Данная практически мгновенная скорость проходки дополнительно может отфильтровываться, например, с помощью алгоритма скользящего среднего или другого алгоритма фильтрации.
соответствует интервалу времени между проведением измерений в первой и второй верхней и нижней станциях для скважинных исследований. Данное оценочное значение ROP преимущественно используют, например, при планировании измерений датчика для непрерывных скважинных исследований в непосредственной близости от долота (или в других частях бурильной колонны). Имеется в виду, что могут вычисляться “статические” и/или практически непрерывные значения ROP . Например, статическое значение ROP может быть вычислено в блоке 112 при превышении β порогового значения. Практически непрерывные значения ROP могут вычисляться, например, в блоке 108 при вычислении β, таким образом получают практически мгновенную скорость проходки. Данная практически мгновенная скорость проходки дополнительно может отфильтровываться, например, с помощью алгоритма скользящего среднего или другого алгоритма фильтрации.
Эталонное и измеренное угловые положения могут дополнительно обрабатывать в блоке 112 для вычисления углов GTF или MTF, например, как указано ниже:
QUOTE  (9)
(9)
QUOTE  (10)
(10)
Приблизительное значение GTF может быть вычислено на основе предположения, что значение β является малым (например, меньше чем около 5 градусов), например, как указано ниже:
QUOTE  (11)
(11)
Аналогично, приблизительное значение MTF может быть вычислено, если значение угла наклона ствола скважины мало (например, меньше чем около 5 градусов) в верхней и нижней станциях для скважинных исследований, например, как указано ниже:
QUOTE  (12)
(12)
Вычисление формул 11 и 12 требует меньше вычислительных ресурсов и может быть предпочтительным при реализации описанного способа в скважинном контроллере. Следует иметь в виду, что MTF и/или GTF альтернативно (и/или дополнительно) могут вычисляться с использованием других известных математических соотношений, например, путем использования угла наклона и угла магнитного склонения или угла наклона, азимута и угла магнитного склонения. Данные математические соотношения описаны, например, в патенте США №7243719 и публикации заявки на патент США №2013/0126239, каждый из которых полностью включен в данную заявку посредством ссылки.
Вычисленные значения положения отклонителя могут сопоставлять со значением положения отклонителя в выбранной точке для вычисления значений коррекции положения отклонителя (ошибки или смещения между значением в выбранной точке и фактическим измеренным значением) при бурении практически в масштабе реального времени. Значения смещения положения отклонителя могут дополнительно обрабатывать для получения функции преобразования системы направленного бурения. Для оценки производительности бурильной системы данная функция преобразования может быть дополнительно оценена в сочетании с различными параметрами бурения и КНБК (например, тип пласта, скорость проходки, конфигурация КНБК и т.д.).
На Фиг. 6 проиллюстрирован вариант реализации контроллера 200, посредством которого могут вычислять угол положения отклонителя для управления направлением бурения. Значение угла положения отклонителя, полученное от способа 100, могут суммировать в 202 со значением положения отклонителя в данной точке (например, с требуемым углом положения отклонителя, выбранным оператором буровой установки) для получения значения ошибки ориентации отклонителя. Значение ошибки ориентации отклонителя снова могут суммировать в 204 с предыдущим значением коррекции ориентации отклонителя для получения текущего значения коррекции ориентации отклонителя, которую могут дополнительно суммировать в 206 со значением положения отклонителя в данной точке для получения эталонного значения ориентации отклонителя. Следует иметь в виду, что архитектура системы управления, проиллюстрированная на Фиг. 6, функционирует подобно пропорционально-интегральному (P+I) регулятору (с коэффициентом усиления P, равным 1) для изменений значения положения отклонителя в данной точке и подобно лишь интегральному регулятору в случае отклика на нарушения ориентации отклонителя. Следует иметь в виду, что описанные варианты реализации изобретения не ограничиваются каким-либо конкретным типом регулятора. Например, могут использоваться другие регуляторы, такие как пропорциональный регулятор, пропорционально-дифференциальный регулятор или пропорционально-интегрально-дифференциальный регулятор. Не могут быть использованы классические регуляторы, такие как моделирующий предикативный регулятор, регулятор с нечетким алгоритмом и т.п.
На Фиг. 7 проиллюстрирован каскадный регулятор 200', который может обрабатывать угол ориентации отклонителя, полученный от способа 100, для направления бурильного инструмента к целевому азимуту. Проиллюстрированный регулятор содержит P+I внешнюю петлю обратной связи 220 для приведения измерения азимута во время цикла бурения к целевому азимуту, введенному оператором буровой установки, и P+I внутреннюю петлю обратной связи 240 для приведения измеренного значения положения отклонителя (MTF или GTF) к значению целевого положения отклонителя. В начале внедрения (например, в начале автоматизированной буровой операции), возможно, будет желательным заблокировать (выключить) внешнюю петлю обратной связи 220, чтобы сделать возможной настройку внутренней петли обратной связи 240 путем установки коэффициентов усиления QUOTE  и QUOTE равными нулю.
и QUOTE равными нулю.
Во внешней петле обратной связи 220 значение целевого азимута QUOTE  суммируют в 222 с измеренным значением азимута QUOTE
суммируют в 222 с измеренным значением азимута QUOTE  от способа 100 для получения сигнала ошибки азимута: QUOTE
от способа 100 для получения сигнала ошибки азимута: QUOTE  . Сигнал ошибки азимута дополнительно суммируют в 224 с весовым значением измеренного угла наклона QUOTE
. Сигнал ошибки азимута дополнительно суммируют в 224 с весовым значением измеренного угла наклона QUOTE  для получения взвешенного сигнала азимутальной ошибки: QUOTE
для получения взвешенного сигнала азимутальной ошибки: QUOTE  . Пропорциональный и интегральный коэффициенты усиления взвешенного сигнала азимутальной ошибки вычисляют в 226 и 228 и суммируют в 230 для получения значения целевого положения отклонителя скважины: QUOTE
. Пропорциональный и интегральный коэффициенты усиления взвешенного сигнала азимутальной ошибки вычисляют в 226 и 228 и суммируют в 230 для получения значения целевого положения отклонителя скважины: QUOTE  . Целевым положением отклонителя может быть или GTF, или MTF и может автоматически (или вручную) выбираться в 235, например, в зависимости от угла наклона ствола скважины.
. Целевым положением отклонителя может быть или GTF, или MTF и может автоматически (или вручную) выбираться в 235, например, в зависимости от угла наклона ствола скважины.
Во внутренней петле обратной связи 240 вычисляют целевой GTF или целевой MTF и вводят в блок управления 260, с помощью которого управляют направлением бурения. В случае, если MTF/GTF коммутатор 235 выбирает GTF, целевое положение отклонителя скважины QUOTE  суммируют в 242 с GTF, полученным от способа 100 для получения сигнала ошибки GTF: QUOTE
суммируют в 242 с GTF, полученным от способа 100 для получения сигнала ошибки GTF: QUOTE  . Пропорциональный и интегральный коэффициенты усиления сигнала ошибки GTF вычисляют в 244 и 246 и суммируют в 248 для получения целевого GTF блока управления: QUOTE
. Пропорциональный и интегральный коэффициенты усиления сигнала ошибки GTF вычисляют в 244 и 246 и суммируют в 248 для получения целевого GTF блока управления: QUOTE  . В случае, если MTF/GTF коммутатор 235 установлен для выбира MTF, целевое положение отклонителя скважины QUOTE суммируют в 252 с MTF, полученным от способа 100 для получения сигнала ошибки MTF: QUOTE
. В случае, если MTF/GTF коммутатор 235 установлен для выбира MTF, целевое положение отклонителя скважины QUOTE суммируют в 252 с MTF, полученным от способа 100 для получения сигнала ошибки MTF: QUOTE 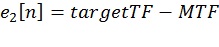 . Пропорциональный и интегральный коэффициенты усиления сигнала ошибки MTF вычисляют в 254 и 256 и суммируют в 258 для получения целевого MTF блока управления: QUOTE
. Пропорциональный и интегральный коэффициенты усиления сигнала ошибки MTF вычисляют в 254 и 256 и суммируют в 258 для получения целевого MTF блока управления: QUOTE  .
.
Способы, описанные в данной заявке, предназначены для реализации в стволе скважины с помощью одного или более контроллеров, расположенных в стволе скважины (например, в отклоняющем/направляющем буровом инструменте). Подходящий контроллер может содержать, например, программируемый процессор, такой как микропроцессор или микроконтроллер и процессорно-читаемый или компьютерно-читаемый программный код, с помощью которого процессор выполняет логические операции. Подходящий процессор может использоваться, например, для выполнения вариантов реализации способа, описанного выше со ссылкой на Фиг. 5, 6 и 7, а также соответствующих описанных математических формул. Подходящий контроллер может также дополнительно содержать другие управляемые компоненты, такие как датчики (например, датчик глубины), устройства хранения данных, источники питания, таймеры и т.п. Контроллер также может быть выполнен с возможностью осуществлять связь с помощью электронных средств связи с датчиками углового положения (например, для получения непрерывных измеренных значений угла наклона и азимута). Подходящий контроллер может также дополнительно осуществлять связь с другими инструментами в бурильной колонне, такими как, например, системы телеметрии, которые осуществляют связь с оборудованием, расположенным на поверхности. Подходящий контроллер может также дополнительно содержать энергонезависимую память или устройство для хранения данных.
Снова ссылаясь на Фиг. 7, описанные варианты реализации изобретения могут дополнительно содержать скважинный отклонитель, содержащий корпус скважинного отклонителя, отклоняющий механизм для управления направлением бурения подземного ствола скважины и датчики для измерения углового положения подземного ствола скважины. Отклонитель может дополнительно содержать скважинный контроллер, содержащий: (i) модуль положения отклонителя, содержащий команды (как в способе 100 на Фиг. 5) для обработки измеренных значений углового положения, принятых от датчиков для получения положения отклонителя в ходе бурения, (ii) внешнюю петлю обратной связи, содержащую команды для обработки измеренных значений изменения угла, принятых от датчиков и целевого азимута для получения целевого направления отклонителя, (iii) внутреннюю петлю обратной связи, содержащую команды для обработки значений положения отклонителя в ходе бурения для получения сигнала ошибки, и (iv) целевой блок управления, содержащий команды для обработки сигнала ошибки с целью получения команд для отклоняющего механизма для управления направлением бурения.
Несмотря на то, что управление с обратной связью положением отклонителя в ходе бурения, а также некоторые преимущества данного способа были описаны достаточно подробно, следует понимать, что в данную заявку могут быть внесены различные изменения, замены и исправления без отклонения от идеи и объема изобретения, определенного прилагаемой формулой изобретения.






















Абсолютные концентрации элементов из ядерной спектроскопии
Скважинное измерение посредством нейтронной активации
Маломощные генераторы нейтронов
Способ гидроразрыва подземных пластов во время их бурения
Способы и устройство для планирования и динамического обновления операций отбора проб во время бурения в подземном пласте
Система и способ для отбора текучей среды из ствола скважины
Способ и устройство для обработки спектроскопических данных в скважине
Способ и устройство для определения во время бурения насыщения водой пласта
Способы и системы для проведения спускоподъемных операций
Система и способ для управления многочисленными скважинными инструментами
Устройство электромагнитного каротажа
Устройство, способ и система стохастического изучения пласта при нефтепромысловых операциях
Способ оптимизации добычи в скважине с искусственным подъемом
Применение разлагаемых волокон в растворах обращенных эмульсий для глушения скважины
Подводная насосная система
Способы производства нефтепромысловых разлагаемых сплавов и соответствующих продуктов
Буровая труба, система покрытия и способ нефтепромысловых применений
Скважинный перфоратор (варианты) и способ перфорации
Установка и система для геологического сопровождения бурения скважины и определения характеристик коллектора
Абсолютные концентрации элементов из ядерной спектроскопии

