Результат интеллектуальной деятельности: Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Вид РИД
Изобретение
Изобретение относится к бортовым системам автоматического управления и стабилизации углового положения беспилотных летательных аппаратов (БПЛА).
Известна система автоматического управления БПЛА, в которой содержатся блок задающего воздействия, блок вычитания, суммирующий усилитель, датчики состояния [1].
Недостатками известной системы управления являются ограниченные функциональные возможности в условиях высоких по уровню значений сигналов управления и для режимов с минимальными скоростными напорами.
Наиболее близким решением является система стабилизации БПЛА по [2].
Известная система содержит задатчик сигнала управления по курсу, последовательно соединенные первый блок вычитания и первый усилитель, последовательно соединенные сумматор и ограничитель сигнала, выход которого является выходом устройства, измеритель угла курса, выход которого соединен со вторым входом первого блока вычитания, и последовательно соединенные измеритель угловой скорости и второй усилитель, выход которого соединен с первым входом сумматора.
Недостатками известного решения являются ограниченные функциональные возможности в канале курса в условиях высоких по уровню значений сигналов управления по курсу и тангажу и для режимов с минимальными скоростными напорами, обусловливающих существенное снижение качества стабилизации.
Решаемой в предложенном решении технической задачей является разработка усовершенствованной системы управления с целью повышения устойчивости процессов углового движения и расширения функциональных возможностей с учетом многофакторных условий полета по скорости, высоте, маневрах. Эти обстоятельства определяют необходимость в идентификации состояния объекта и системы стабилизации в целом. Предложенным построением обеспечивается повышение устойчивости и качества процессов в расширенных условиях полета БПЛА.
Указанный технический результат достигается тем, что в известную систему стабилизации, содержащую задатчик сигнала управления по курсу, последовательно соединенные первый блок вычитания и первый усилитель, последовательно соединенные сумматор и ограничитель сигнала, выход которого является выходом устройства, измеритель угла курса, выход которого соединен со вторым входом первого блока вычитания, и последовательно соединенные измеритель угловой скорости по курсу и второй усилитель, выход которого соединен с первым входом сумматора, дополнительно введены последовательно соединенные управляемый ключ, первый вход которого соединен с выходом первого блока вычитания, третий усилитель и второй блок вычитания, второй вход которого соединен с выходом первого усилителя, а выход - со вторым входом сумматора, первый задатчик порогового сигнала, последовательно соединенные адаптивное инерционное звено, вход которого соединен с выходом задатчика сигнала управления по курсу, а выход - со вторым входом первого блока вычитания, последовательно соединенные первый формирователь модульной функции, третий блок вычитания, второй вход которого соединен с выходом первого задатчика порогового сигнала, первое однополярное двухпозиционное реле с гистерезисом, первый логический элемент «ИЛИ» и второй логический элемент «ИЛИ», выход которого соединен со вторым входом управляемого ключа, второй задатчик порогового сигнала, последовательно соединенные задатчик сигнала управления по тангажу, второй формирователь модульной функции, четвертый блок вычитания, второй вход которого соединен с выходом второго задатчика порогового сигнала, и второе однополярное двухпозиционное реле с гистерезисом, выход которого соединен со вторым входом первого логического элемента «ИЛИ», третий задатчик порогового сигнала и последовательно соединенные датчик скоростного напора, пятый блок вычитания, второй вход которого соединен с выходом третьего задатчика порогового сигнала, и третье однополярное двухпозиционное реле с гистерезисом, выход которого соединен со вторым входом второго логического элемента «ИЛИ».
Действительно, при этом обеспечивается отработка сигналов боковой стабилизации БПЛА с максимальным качеством в широком диапазоне изменения скоростного напора и больших уровней управляющих сигналов.
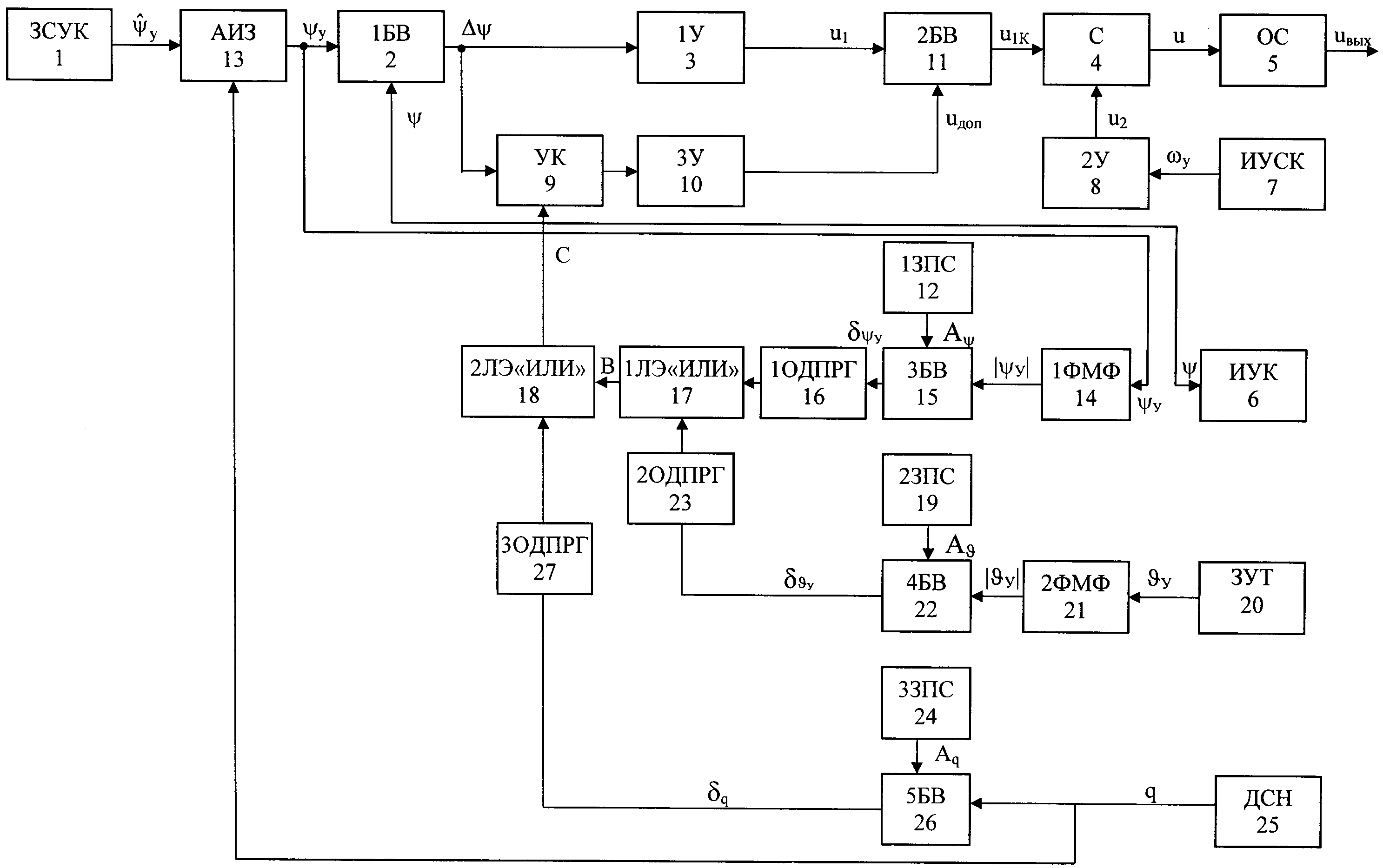
На чертеже представлена блок-схема предложенной модернизированной системы стабилизации.
Система содержит задатчик сигнала управления по курсу 1 (ЗСУК), последовательно соединенные первый блок вычитания 2 (1БВ) и первый усилитель 3 (1У), последовательно соединенные сумматор 4 (С) и ограничитель сигнала 5 (ОС), выход которого является выходом системы стабилизации, измеритель угла курса 6 (ИУК), выход которого соединен со вторым входом первого блока вычитания 2, последовательно соединенные измеритель угловой скорости по курсу 7 (ИУСК) и второй усилитель 8 (2У), выход которого соединен с первым входом сумматора 4, последовательно соединенные управляемый ключ 9 (УК), первый вход которого соединен с выходом первого блока вычитания 2, третий усилитель 10 (3У) и второй блок вычитания 11 (2БВ), второй вход которого соединен с выходом первого усилителя 3, а выход - со вторым входом сумматора 4, первый задатчик порогового сигнала 12 (1ЗПС), последовательно соединенные адаптивное инерционное звено 13 (АИЗ), вход которого соединен с выходом задатчика сигнала управления по курсу 1, а выход - со вторым входом первого блока вычитания 2, последовательно соединенные первый формирователь модульной функции 14 (1ФМФ), третий блок вычитания 15 (3БВ), второй вход которого соединен с выходом первого задатчика порогового сигнала 12, первое однополярное двухпозиционное реле с гистерезисом 16 (1ОДПРГ), первый логический элемент «ИЛИ» 17 (1ЛЭ «ИЛИ») и второй логический элемент «ИЛИ» 18 (2ЛЭ «ИЛИ»), выход которого соединен со вторым входом управляемого ключа 9, второй задатчик порогового сигнала 19 (2ЗПС), последовательно соединенные задатчик сигнала управления по тангажу 20 (ЗСУТ), второй формирователь модульной функции 21 (2ФМФ), четвертый блок вычитания 22 (4БВ), второй вход которого соединен с выходом второго задатчика порогового сигнала 19, и второе однополярное двухпозиционное реле с гистерезисом 23 (2ОДПРГ), выход которого соединен со вторым входом первого логического элемента «ИЛИ» 17, третий задатчик порогового сигнала 24 (3ЗПС) и последовательно соединенные датчик скоростного напора 25 (ДСН), пятый блок вычитания 26 (5БВ), второй вход которого соединен с выходом третьего задатчика порогового сигнала 24, и третье однополярное двухпозиционное реле с гистерезисом 27 (3ОДПРГ), выход которого соединен со вторым входом второго логического элемента «ИЛИ» 18.
Система функционирует следующим образом.
Сигналы управления по курсу  от задатчика 1 через инерционное звено 13 - в виде сигнала ψу - и текущего положения угла ψ от измерителя угла курса 6 поступают на первый блок вычитания 2, с выхода которого сигнал рассогласования Δψ
от задатчика 1 через инерционное звено 13 - в виде сигнала ψу - и текущего положения угла ψ от измерителя угла курса 6 поступают на первый блок вычитания 2, с выхода которого сигнал рассогласования Δψ

поступает на первый усилитель 3, который формирует базовую компоненту сигнала управления по рассогласованию

где К1 - передаточный коэффициент усилителя 3.
Компонента сигнала управления u2 по угловой скорости формируется в усилителе 8:

где ωу - сигнал угловой скорости, получаемый от измерителя 7;
К2 - передаточный коэффициент по угловой скорости усилителя 8.
В сумматоре 4 все компоненты сигнала управления суммируются, формируя сигнал u, который ограничивается звеном 5, вырабатывая выходной сигнал uвых.
Расчет значений передаточных коэффициентов К1 и К2 определен исходя из обеспечения устойчивости и качества процессов.
Управляемый ключ 9 разомкнут.
При возникновении ситуации с высокими по уровню значениями сигналов управления ψу от задатчика 1 или ϑу от задатчика сигнала угла тангажа 20, а также при малых значениях скоростного напора q от датчика 25, определенных соответствующими пороговыми значениями и установленными соответственно в блоках 12 (Aψ), 19 (Аϑ) и 24 (Aq), в реальной аппаратуре, имеющей реальные технические ограничения, возможен срыв устойчивого движения.
Предложенным решением такая ситуация исключается следующим образом. Выделяются функции модулей сигналов ψу и ϑу блоками 14 и 21 соответственно, т.е. |ψу| и |ϑу|. Блоки вычитания 15, 22 и 26 формируют разность сигналов:

При превышении величины любого из сигналов  ,
,  , δq над величиной зоны нечувствительности блоков 16, 23, 27 соответственно с управлением от логических элементов «ИЛИ» 17 и 18 по сигналам В и С соответственно обеспечивается замыкание ключа 9. Подключается дополнительная компонента сигнала управления по рассогласованию Δψ через третий усилитель 10 с коэффициентом ΔК1 ко второму блоку вычитания 11. На выходе блока 11 формируется сигнал u1к, равный
, δq над величиной зоны нечувствительности блоков 16, 23, 27 соответственно с управлением от логических элементов «ИЛИ» 17 и 18 по сигналам В и С соответственно обеспечивается замыкание ключа 9. Подключается дополнительная компонента сигнала управления по рассогласованию Δψ через третий усилитель 10 с коэффициентом ΔК1 ко второму блоку вычитания 11. На выходе блока 11 формируется сигнал u1к, равный

Сигнал u1к поступает на сумматор 4, на выходе которого формируется сигнал u, равный

Сигнал и ограничивается в блоке 5, сигнал с выхода которого является выходным сигналом системы uвых.
Необходимо отметить, что решение основано на уменьшении общего коэффициента сигнала по рассогласованию в канале курса, который становится равным (К1-ΔК1). При этом ΔК1=(0,5÷0,8)⋅К1. Такое решение позволяет добиться большей устойчивости.
В дальнейшем, при уменьшении сигналов  ,
,  и увеличении сигнала δq с учетом наличия гистерезисной функции в блоках 16, 23 и 27 ключ 9 размыкается, восстанавливая передаточный коэффициент по Δψ, равный К1, т.е. восстанавливая расчетное качество работы системы стабилизации. При этом в процессе функционирования устройства в инерционном звене 13 адаптивно, в функции от скоростного напора q изменяется постоянная времени этого звена также с целью повышения качества процессов.
и увеличении сигнала δq с учетом наличия гистерезисной функции в блоках 16, 23 и 27 ключ 9 размыкается, восстанавливая передаточный коэффициент по Δψ, равный К1, т.е. восстанавливая расчетное качество работы системы стабилизации. При этом в процессе функционирования устройства в инерционном звене 13 адаптивно, в функции от скоростного напора q изменяется постоянная времени этого звена также с целью повышения качества процессов.
Предложенная система несложно реализуется на элементах автоматики и вычислительной техники, например, по [3, 4] и алгоритмически и решает поставленную проблему.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов / Под ред. Г.С. Бюшгенса. М.: Наука. Физматлит, 1998, с. 443.
2. Патент РФ №2338236, 10.11.2008 г., G05D 1/08.
3. В.Б. Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с. 22, 41.
4. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с. 107, 126.
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата, содержащая задатчик сигнала управления по курсу, последовательно соединенные первый блок вычитания и первый усилитель, последовательно соединенные сумматор и ограничитель сигнала, выход которого является выходом устройства, измеритель угла курса, выход которого соединен со вторым входом первого блока вычитания, и последовательно соединенные измеритель угловой скорости по курсу и второй усилитель, выход которого соединен с первым входом сумматора, отличающаяся тем, что в нее дополнительно введены последовательно соединенные управляемый ключ, первый вход которого соединен с выходом первого блока вычитания, третий усилитель и второй блок вычитания, второй вход которого соединен с выходом первого усилителя, а выход - со вторым входом сумматора, первый задатчик порогового сигнала, последовательно соединенные адаптивное инерционное звено, вход которого соединен с выходом задатчика сигнала управления по курсу, а выход - со вторым входом первого блока вычитания, последовательно соединенные первый формирователь модульной функции, третий блок вычитания, второй вход которого соединен с выходом первого задатчика порогового сигнала, первое однополярное двухпозиционное реле с гистерезисом, первый логический элемент «ИЛИ» и второй логический элемент «ИЛИ», выход которого соединен со вторым входом управляемого ключа, второй задатчик порогового сигнала, последовательно соединенные задатчик сигнала управления по тангажу, второй формирователь модульной функции, четвертый блок вычитания, второй вход которого соединен с выходом второго задатчика порогового сигнала, и второе однополярное двухпозиционное реле с гистерезисом, выход которого соединен со вторым входом первого логического элемента «ИЛИ», третий задатчик порогового сигнала и последовательно соединенные датчик скоростного напора, пятый блок вычитания, второй вход которого соединен с выходом третьего задатчика порогового сигнала, и третье однополярное двухпозиционное реле с гистерезисом, выход которого соединен со вторым входом второго логического элемента «ИЛИ».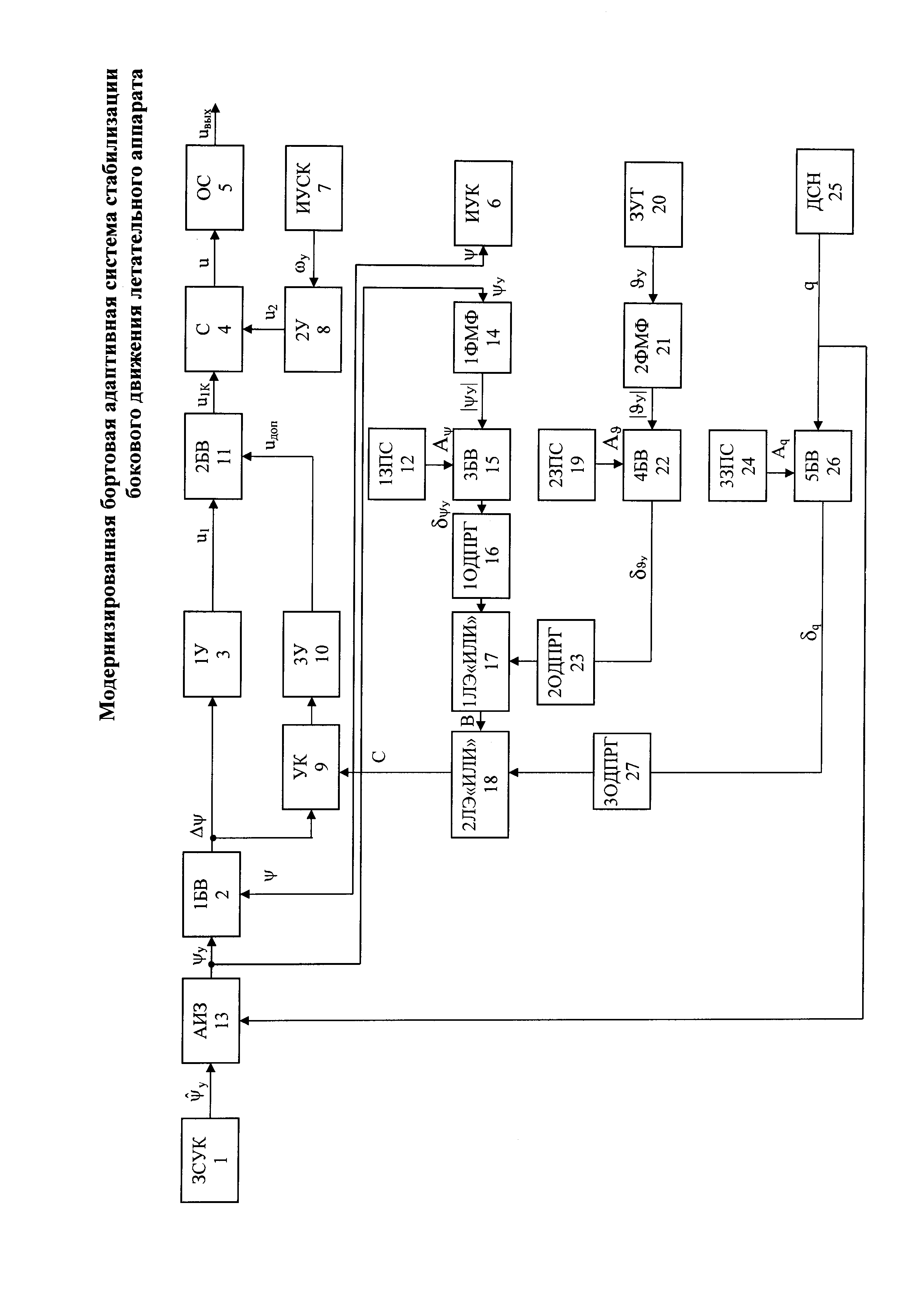
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ выбора инструментального материала
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ выбора инструментального материала

