Результат интеллектуальной деятельности: Способ и устройство контроля самопроизвольного трогания поезда
Вид РИД
Изобретение
Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте, а именно к поездным указателям для сигнализации о нештатных значениях и отклонениях скорости подвижного состава (локомотива).
Известно локомотивное устройство контроля самопроизвольного трогания (УКСТ) поезда [1] на основе скоростемера [2], получающего через редуктор вращение от приводного вала локомотива, при этом измеритель скорости и регистрирующее устройство выполнены по кинематической схеме часового механизма со стрелочным индикатором данных на приборной панели локомотива.
При самопроизвольном трогании поезда и превышении уровня его скорости, «минимально контролируемой скоростемером» [1], УКСТ выдает машинисту звуковой сигнал на протяжении 6-7 с, по истечении которых, в случае отсутствия действий машиниста по управлению движением поезда, УКСТ замыкает реле электропневматического клапана автостопа локомотива, что приводит к экстренному торможению поезда.
Уровень скорости, «минимально контролируемой скоростемером», определяется числом оборотов, а также угловым положением приводного вала локомотива, «при этом 30 оборотов приводного вала должны соответствовать 1 км пройденного локомотивом пути, а 0,016 об/с приводного вала - скорости движения локомотива 2 км/ч» [2]. Эти соотношения должны быть обеспечены «для соблюдения требований безопасности движения всех типов тяговых подвижных составов (ТПС)» [5] на локомотивах любых серий путем подбора требуемого передаточного отношения редуктора скоростемера.
В скоростемере от приводного вала работает специальный механизм регистрации направления движения локомотива [2].
Скоростемер приводит в действие группу реле [2], расположенных внутри его корпуса, в частности реле фиксации положения электропневматического клапана, реле автоматического управления тормозами и контакт «0-10» превышения локомотивом скорости, минимально контролируемой скоростемером [1].
Недостатками данного устройства УКСТ являются:
- контактный метод определения скорости, что ухудшает: точность измерения; герметичность корпуса; технологичность эксплуатации скоростемера;
- механический способ измерения и регистрации скорости, что снижает: информативность; уровень системной совместимости; надежность, в частности, вибро- и ударопрочность скоростемера;
- сложность измерительной системы скоростемера, в частности, наличие специального механизма регистрации направления движения локомотива;
- малая достоверность контроля движения поезда с момента его самопроизвольного трогания до окончания экстренного торможения из-за наличия люфтов в механической системе скоростемера, а также из-за малой разрешающей способности устройства УКСТ при малых скоростях движения, вызывающей неопределенность в диапазоне «0-10» значения скорости локомотива, минимально контролируемой скоростемером.
Известен бесконтактный способ определения направления и скорости вращения объекта, реализованный в устройстве [3], содержащем магнитометрический датчик в виде феррозондового градиентомера, закрепленного с внешней стороны корпуса прибора над вращающимся объектом, оснащенным магнитными метками различных уровней намагниченности для формирования заданной последовательности уровней информационного сигнала градиентомера за один оборот объекта, определяющей направление вращения, причем длительность периода сигналов за один оборот объекта определяет скорость его вращения.
Недостатками данного способа являются:
- сложность схемотехнического аналогового преобразования уровней сигнала датчика в кодовую последовательность;
- сложность изготовления объекта вращения из-за необходимости оснащения его кодовыми метками;
- сложность реализации при увеличении количества меток с целью повышения угловой разрешающей способности.
Известно устройство бесконтактного преобразователя скорости вращения и углового положения зубчатого колеса, выполненного из магнитомягкого материала, заключенное в немагнитный корпус с закрепленным на нем с внешней стороны датчиком на основе постоянного кольцевого магнита, определяющим градиент магнитного поля при смене положения зуба и впадины колеса, с возможностью настройки на различные зазоры и геометрию зуба [4]. В результате повышается эксплуатационная надежность преобразователя.
Недостатками данного устройства являются:
- особые требования к магнитным свойствам материала - сложность технологии изготовления зубчатого колеса;
- наличие постоянного магнита, вызывающего накопление магнитосодержащих частиц в зазорах «датчик - зубчатое колесо» и оказывающего дестабилизирующее влияние в виде собственного магнитного потока на работу измерительной и электронной схем преобразователя;
- отсутствие функций схемотехнического управления внешними регистрирующими и исполнительными устройствами;
- низкая разрешающая способность определения углового положения зубчатого колеса, ограниченная суммарной угловой мерой сектора «зуб-впадина»;
- невозможность определения направления вращения зубчатого колеса.
Наиболее близким по технической сущности и достигаемому результату к заявляемым способу и устройству является изобретение, предназначенное для автоматизированного управления тягой и тормозами подвижного состава с соблюдением требований безопасности движения всех типов ТПС, содержащее средство измерения скорости вращения колесной пары локомотива с возможностью реализации функций скоростемера для регистрации направления движения и его параметров в блоке регистрации и индикации, установленном на пульте машиниста, микропроцессорный блок с аналоговыми и дискретными средствами измерения, обработки данных и управления, приборы состояния и показаний безопасности с возможностью обмена информацией с микропроцессорным блоком для управления аппаратурой комплекса локомотивных устройств безопасности [5].
Недостатками данного способа и устройства его реализации являются:
- малая разрешающая способность датчика скоростемера, приводящая к неопределенности контроля движения поезда с момента его самопроизвольного трогания до окончания автоматического экстренного торможения;
- наличие в скоростемере дополнительного устройства определения и регистрации направления движения локомотива;
- необходимость обеспечения бесконтактного метода измерения скорости вращения приводного вала локомотива;
- необходимость устранения кодовых меток из конструкции тела вращения преобразователя.
Задача предлагаемого изобретения заключается в обеспечении автоматизированного контроля направления и скорости движения поезда с момента его самопроизвольного трогания с целью автоматического включения экстренного торможения в случае отсутствия действий машиниста по управлению движением поезда.
Техническим результатом применения предлагаемого изобретения является повышение эффективности автоматизированной системы контроля и управления движением поезда за счет улучшения метрологических и эксплуатационных характеристик локомотивного скоростемера, основанного на: бесконтактном способе преобразования параметров движения; повышении разрешающей способности в области скоростей минимально контролируемых скоростемером; определении по общему информационному каналу блока микропроцессора, без дополнительных устройств скоростемера, всех параметров движения поезда.
Поставленная задача решается, а технический результат достигается тем, что в способе и устройстве автоматизированного управления тяговым подвижным составом, содержащих средства управления, связанные с блоком регистрации, блоком ввода аналоговых и дискретных сигналов, содержащим микропроцессорные средства обработки информации, измерительным блоком и установленными на пульте машиниста средствами индикации, причем измерительный блок с возможностью реализации функций скоростемера содержит преобразователь параметров вращения колесной пары локомотива, который выполнен бесконтактным за счет закрепления его зубчатого колеса из ферросодержащего материала на ведущем валу локомотива с внешней стороны герметичного корпуса преобразователя, а его магнитометрического датчика, присоединенного к электронным устройствам обработки аналоговых и цифровых сигналов микропроцессорного блока, - с внутренней, при этом магнитометрический датчик выполнен в виде двух плоскостных феррозондовых градиентомеров с параллельными полуэлементами, разнесенными на расстояние Δδ, при ориентации обеих плоскостей градиентомеров по радиальным плоскостям зубчатого колеса, чем обеспечивается уровень сигнала каждого градиентомера, соответствующий цифровой «1» в его угловом положении над зубом колеса, и уровень сигнала, соответствующий цифровому «0» в его угловом положении над впадиной колеса, причем преобразование аналоговых сигналов градиентомеров в цифровые уровни осуществляется электронными устройствами блока микропроцессора, а расстояние между градиентомерами задается требуемой угловой разрешающей способностью преобразователя и соотношением угловых мер секторов «зуб/впадина» зубчатого колеса, направление вращения которого определяется микропроцессорным блоком как совокупный результат дешифрации чередования сигналов «1», «0» от обоих градиентомеров за период изменения углового положения зубчатого колеса на величину угловой меры сектора «зуб + впадина», причем скорость вращения определяется длительностью этого периода, а ускорение-замедление вращения определяется как результат сравнения длительностей предыдущей с последующей, при этом параметры вращения преобразуются и отображаются при помощи блока микропроцессора в параметры движения локомотива: скорость; ускорение-замедление; направление движения, с возможностью выдачи блоком микропроцессора управляющих сигналов на устройства автоматизированного управления тяговым подвижным составом.
На Фиг. 1÷3 представлены данные, раскрывающие сущность изобретения.
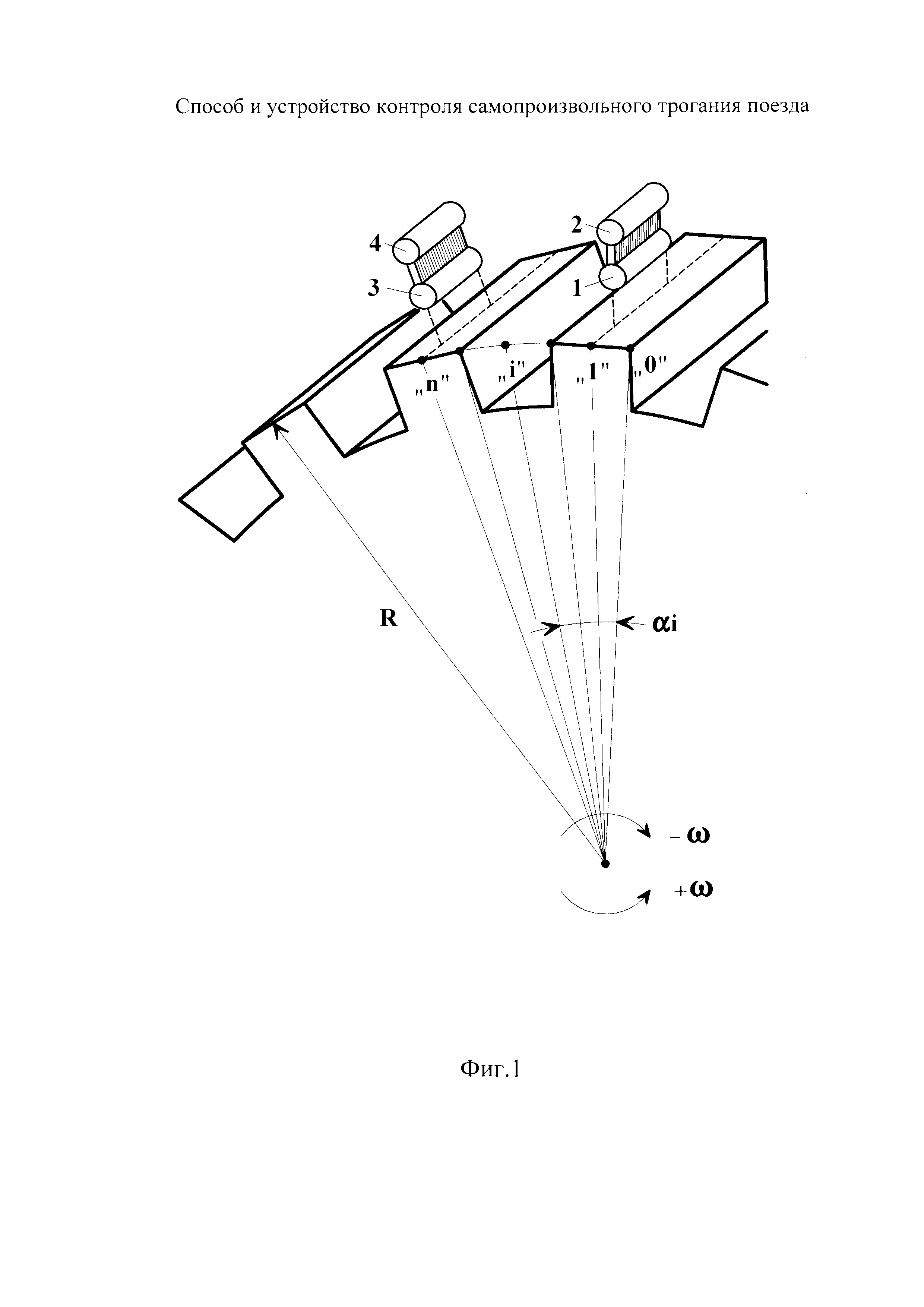
На Фиг. 1 представлена схема преобразователя угловых положений зубчатого колеса скоростемера. Корпус и способ крепления на нем датчика условно не показаны.
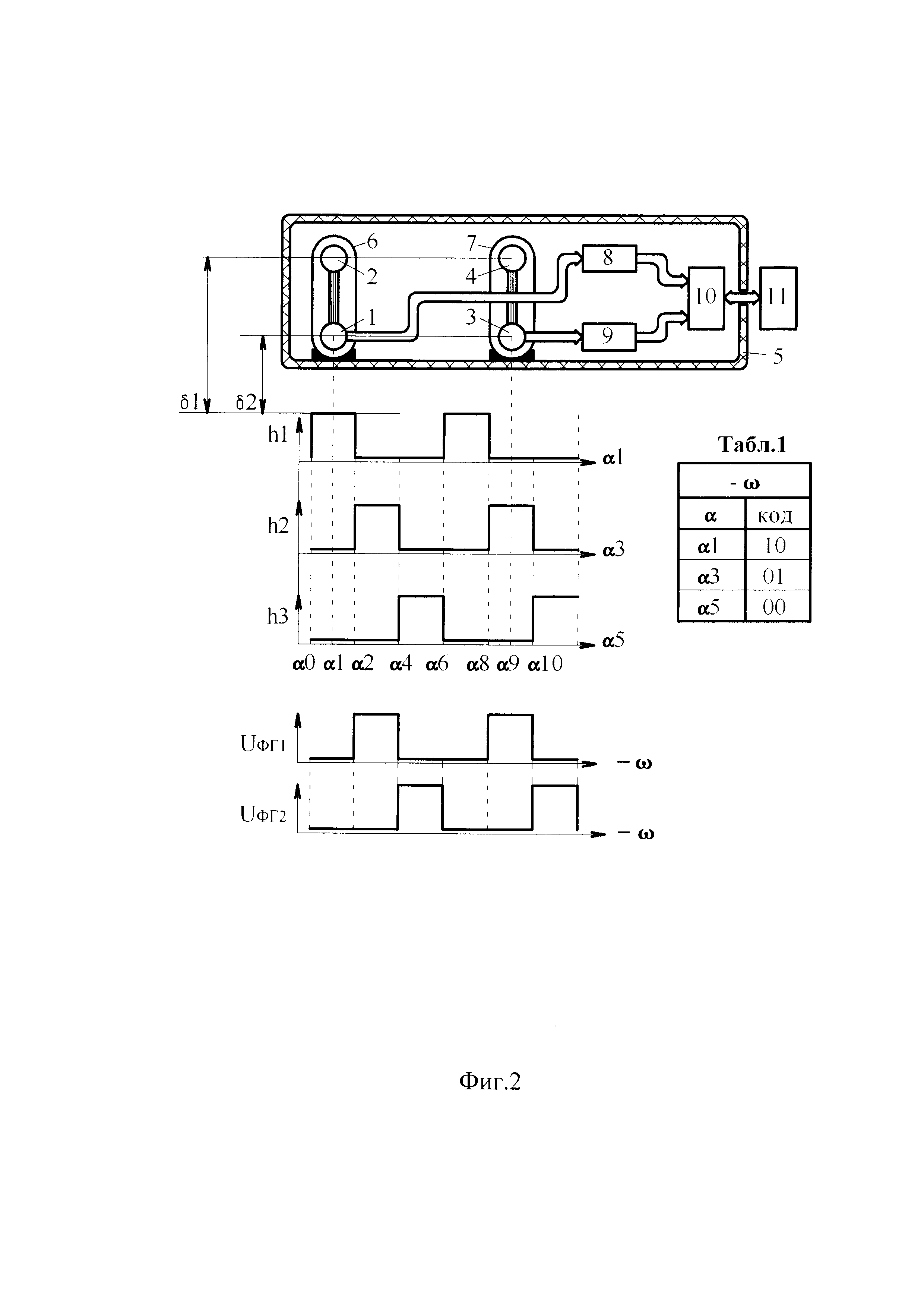
На Фиг. 2 представлены данные, раскрывающие, согласно Фиг. 1, способ определения направления вращения (-ω) зубчатого колеса с отношением 1/2 угловых мер секторов зуб/впадина.
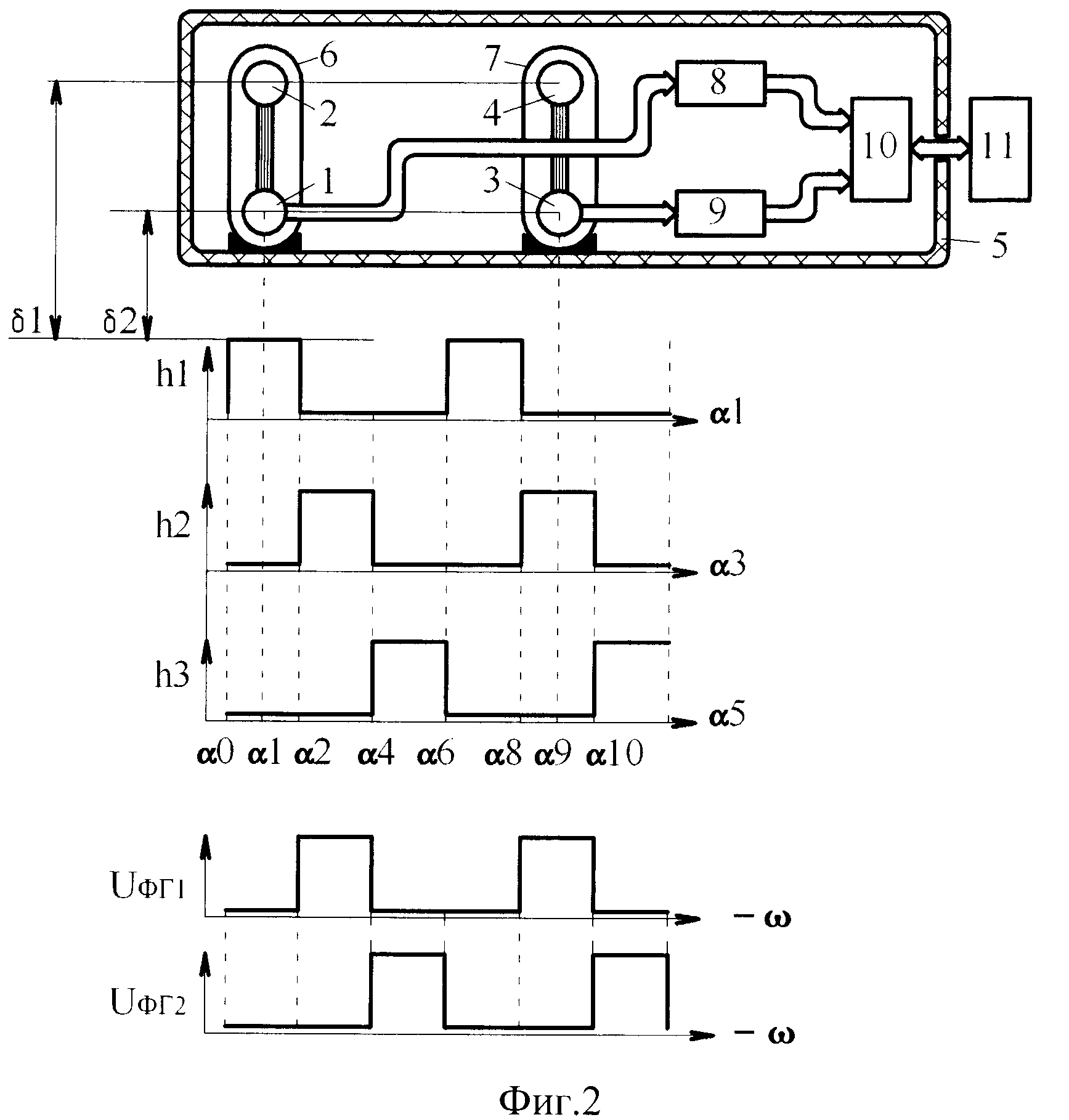
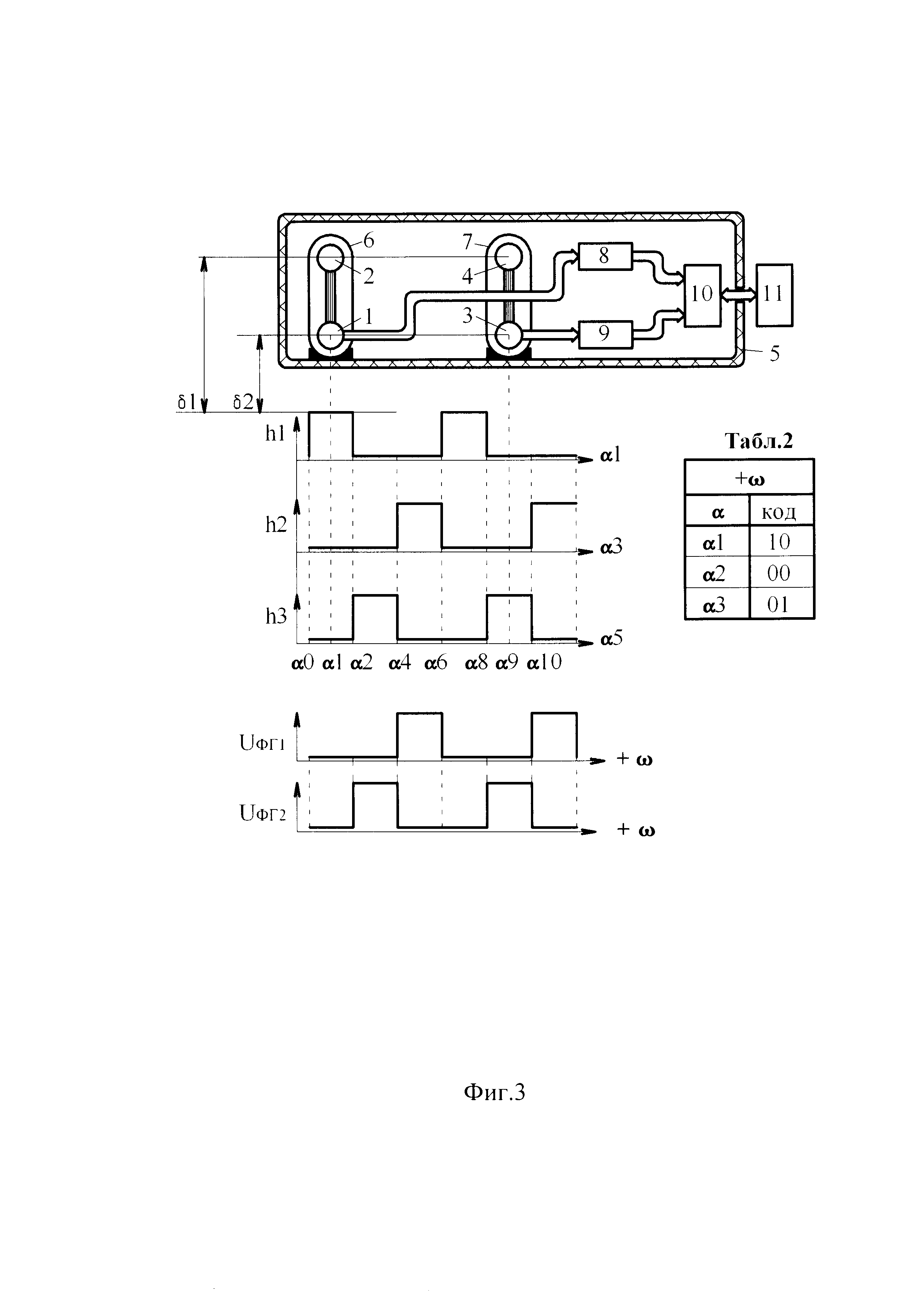
На Фиг. 3 представлены данные, раскрывающие, согласно Фиг. 1, способ определения направления вращения (+ω) зубчатого колеса с отношением 1/2 угловых мер секторов зуб/впадина.
Сущность изобретения состоит в следующем.
Самопроизвольное трогание ТПС относится к наиболее опасным предпосылкам аварийных ситуаций на железнодорожном транспорте. Данного рода опасность возникает как проявление субъективного фактора - потери машинистом контроля и функции управления локомотивом. Предотвращение проявлений субъективного фактора обеспечивается в автоматизированных системах контроля и управления ТПС на основе объективных данных измерительных устройств, приводящих в действие исполнительные механизмы экстренного торможения. Экстренную остановку большегрузного состава эффективнее осуществлять в начальной фазе самопроизвольного трогания, то есть при малой скорости движения. В нормативных документах по автоматическому контролю и управлению движением ТПС в условиях самопроизвольного трогания утверждено определение уровня скорости 2 км/ч, «минимально контролируемой скоростемером», имеющего ограничение снизу в виде разрешающей способности 0,016 об/с преобразователя угловых положений приводного вала локомотива. Одним из факторов данного ограничения является механический контактный способ преобразования датчика скоростемера, представляемого в нормативных документах по ТПС в качестве базового, что ухудшает также его вибро- и ударопрочность.
Еще одним фактором ограничения функциональных возможностей разрабатываемых преобразователей для локомотивных скоростемеров является требование наличия, подобно нормативному датчику, дополнительного устройства для регистрации направления угловых перемещений тела вращения с целью определения направления движения локомотива.
Также немаловажным является требование применения, в качестве тела вращения бесконтактного преобразователя, ферросодержащего зубчатого колеса, изготавливаемого по традиционным технологиям, без применения специальных, а тем более намагниченных материалов.
Совокупности приведенных требований отвечает предлагаемое изобретение, основу которого составляет сочетание: отличительных свойств феррозондовых градиентомеров (ФГ) как магниточувствительных элементов; принципов построения мультисенсорных устройств, а также синхронной алгоритмической обработки данных по нескольким информационным каналам.
При расположении, согласно Фиг. 1-3, любого из феррозондовых градиентомеров, например 6, над поверхностью зуба различие δ1 и δ2 расстояний от поверхности до полуэлементов 1 и 2 воспринимается ими как разность магнитных воздействий зуба, что, согласно принципу действия градиентомера, определяет максимум выходного сигнала 6, преобразуемого электронным (ЭУ) устройством 8 в логический уровень «1». При расположении любого из ФГ, например 6, над поверхностью впадины градиент магнитного воздействия на 1 и 2 резко снижается из-за удаленности ФГ от ферросодержащих поверхностей на величину h высоты зуба. Малая величина разности магнитных воздействий на 1 и 2 определяет минимум выходного сигнала 6, преобразуемый 8 в логический уровень «0». Ортогональная ориентация плоскости полуэлементов 1-2 относительно поверхностей зуба и впадины задает острую радиальную направленность ФГ, что отражается в виде высокой разрешающей способности датчика по параметру Δδ. В результате обеспечивается дистанционность считывания через немагнитную стенку герметичного корпуса 5 датчика, угловых перемещений зубчатого колеса не только в центральных, но и в краевых и промежуточных 0; 1; …i; …n положениях зуба и впадины относительно плоскости полуэлементов 1-2 градиентомера 6.
Датчик состоит из 6, 7 градиентомеров, сигнальные цепи которых образуют два физически разделенных, но информационно совмещенных канала на входе блока 10 микропроцессора (МП) для синхронной обработки данных обоих каналов по его алгоритму. По алгоритму микропроцессора также реализуется функция преобразования угловых перемещений (скорость; ускорение-замедление; направление вращения) зубчатого колеса в линейные параметры движения локомотива (ТПС): скорость; ускорение-замедление; направление - с представлением информации о данных параметрах движения на выходе блока 10.
Алгоритмы определения направлений вращения зубчатого колеса задаются соотношением угловых мер секторов «зуб/впадина». На Фиг. 2, Фиг. 3 даны алгоритмы по соотношению 1/2, при этом угловая мера суммарного сектора «зуб + впадина» составляет 3 угловых меры зуба. На Фиг. 2, согласно Фиг. 1, при направлении вращения (-ω) угловые метки «0; 1…i; …n», условно принадлежащие колесу с высотой зуба h, перемещаются относительно угловых базовых (неподвижных) координат полуэлементов 1-2 и 3-4 по алгоритму нарастания номеров α0, α1…α6, α9… меток. На диаграммах h(α) определен период повторяющихся положений соседних зубьев относительно двух градиентомеров 6 и 7, равный 3-м угловым мерам зуба. Совокупность UФГ1, UФГ2 информационных сигналов 6 и 7, как синхронизированная последовательность в пределах периода α0-α6, при вращении (-ω), после обработки в 8, 9, представляется в блоке 10 в виде последовательности двухразрядных кодов (Табл. 1 по Фиг. 2). В блоке 10, по методу сравнения с шаблоном, последовательность кодов Табл. 1 (Фиг. 2) отражает направление вращения (-ω); последовательность кодов Табл. 2 (Фиг. 3) отражает направление вращения (+ω). Период чередования кодов (Табл. 1, Табл. 2) пересчитывается в блоке 10 в скорость вращения зубчатого колеса и, следовательно, в скорость движения ТПС (локомотива). Методом сравнения периодов - предыдущего с последующим - чередования кодов (Табл. 1, Табл. 2) определяются ускорения-замедления движения ТПС (локомотива). Метод дешифрации кодов по Табл. 1; Табл. 2 позволяет алгоритмически повысить в блоке 10 разрешающую способность преобразователя до 1/3 угловой меры сектора «зуб + впадина».
Устройство для технической реализации способа содержит: зубчатое колесо преобразователя диаметра 2R из ферросодержащего материала (Фиг. 1) с возможностью вращения и угловых перемещений αi как по часовой стрелке (-ω), так и против (+ω). Величины угловых перемещений αi, а также угловые размеры зуба и впадины определяются координатами «0; 1…i; …n», при этом перемещения αi как в (-ω), так и в (+ω) направлениях отсчитываются от базовых координат градиентомеров на полуэлементах 1, 2 и 3, 4, неподвижно закрепленных (Фиг. 2, Фиг. 3) на немагнитном корпусе (К) 5 преобразователя (К на Фиг. 1 условно не показан). Полуэлементы 1, 2 и 3, 4 разнесены в плоскостях феррозондовых градиентомеров 6 и 7 на расстояние Δδ=δ1-δ2 при δ1; δ2 удаленностях полуэлементов от образующей поверхности зубчатого колеса при h высоте зуба относительно впадины (Фиг. 2, Фиг. 3). Электронные устройства 8; 9 содержат схемы возбуждения, а также схемы аналоговой и цифровой обработки сигналов 6 и 7. Блок 10 микропроцессора производит алгоритмическую обработку данных преобразователя, формирует и выдает сигналы управления на внешние индицирующие и исполнительные (ИИУ) устройства 11 автоматизированной системы. Диаграммы h1; h2; h3 представляют на Фиг. 2 последовательность угловых αi перемещений зубчатого колеса в направлении (-ω) на величину ширины зуба при соотношении 1/2 угловых мер секторов зуб/впадина. Диаграммы UФГ1; UФГ2 цифровых сигналов ЭУ градиентомеров в совокупности представляют данные (Табл. 1 по Фиг. 2) для определения в МП параметров (скорость; ускорение-замедление; направление) движения ТПС. Причем направление движения определяется по общему информационному каналу, что освобождает преобразователь от дополнительного функционального устройства.
На Фиг. 3 диаграммы h1; h2; h3 представляют последовательность угловых αi перемещений зубчатого колеса в направлении (+ω) на величину ширины зуба при соотношении 1/2 угловых мер секторов зуб/впадина. Диаграммы UФГ1; UФГ2 цифровых сигналов градиентомеров в совокупности представляют данные (Табл. 2 по Фиг. 3) для определения в блоке МП параметров движения ТПС, подобно Фиг. 2, Табл. 1.
Устройство реализации способа работает следующим образом.
Закрепленное на ведущем валу локомотива зубчатое колесо (Фиг. 1) преобразователя угловых перемещений при самопроизвольном трогании ТПС изменяет свое угловое положение αi относительно градиентомеров 6 и 7 датчика. Немагнитный герметичный корпус 5 датчика (Фиг. 2, Фиг. 3), как деталь локомотива, неподвижно установлен в непосредственной близости от зубчатого колеса так, чтобы плоскости полуэлементов 1-2 и 3-4 градиентомеров 6 и 7 находились в радиальных продольных плоскостях колеса. Изменение углового положения αi колеса как в направлении (-ω), так и в направлении (+ω) воспринимается 6 и 7 и отображается ими в виде уровней напряжений, которые преобразуются схемами 8 и 9 в UФГ1 и UФГ2 цифровые сигналы «1»; «0». Сигнал «1» соответствует угловому положению ФГ над зубом, сигнал «0» - над впадиной, причем острая направленность чувствительности ФГ в радиальных продольных плоскостях колеса обеспечивает идентификацию зуба и впадины не только в их центральных радиальных сечениях, но и в краевых и промежуточных. Кодовые последовательности UФГ1 и UФГ2, образующиеся при угловых перемещениях колеса, поступают в блок 10 микропроцессора (МП), где в результате алгоритмической обработки представляются параметры: скорости; ускорения-замедления; направления вращения, определение которого происходит без специальных дополнительных устройств. В МП также производится преобразование параметров угловых перемещений зубчатого колеса в параметры линейных перемещений локомотива (ТПС), отображаемые в блоке 11 исполнительных и индицирующих устройств. Применение блока МП обеспечивает также повышение уровня системной совместимости и информативности скоростемера при автоматизации и сочетании функций измерения, обработки и управления аппаратурой комплекса локомотивных устройств безопасности, в частности УКСТ. Причем повышение угловой разрешающей способности в предлагаемом способе и устройстве позволяет снизить порог скорости «минимально контролируемый скоростемером» по сравнению с базовым устройством. Так, для получения известными датчиками, подобными аналогу [4], разрешающей способности базового скоростемера 0,016 об необходимо зубчатое колесо с числом зубьев 63. Техническая реализация предлагаемого способа позволяет получить при данном числе зубьев угловую разрешающую способность 0,0053 об, что обеспечивает возможность снижения порога скорости, «минимально контролируемый скоростемером», с 2 км/ч до 0,67 км/ч, а следовательно, опережающего контроля за изменением параметров движения при самопроизвольном трогании ТПС (локомотива).
Источники информации
1. Бервинов В.И., Доронин Е.Ю. Локомотивные устройства безопасности. - М.: Маршрут, 2005. - 156 с.
2. Венцевич Л.Е. Локомотивные скоростемеры и расшифровка скоростемерных и диаграммных лент DJVU. - М.: УМК МПС РФ, 2002. - 272 с.
3. Патент RU №2182660, МПК Е21В 47/10, 20.05.2002 г.
4. Патент RU №2207575, МПК G01P 3/488, 27.06.2003 г.
5. Патент RU №2254256, МПК B61L 15/00, 20.06.2005 г.
Устройство для линейной сварки трением блисков
Экзоскелет с электропневматической системой управления
Устройство и способ полета в воздухе с возможностью вертикального взлета и посадки
Способ утилизации тепловой энергии, вырабатываемой электрической станцией
Способ нагрева сетевой воды на тепловой электрической станции
Универсальный электрошариковый первичный преобразователь расхода электропроводной жидкости
Трехфазное симметрирующее устройство и способ управления им
Магнитопровод статора электромеханических преобразователей энергии с интенсивным охлаждением (варианты) и способ его изготовления
Способ настройки многоцелевого станка для пятикоординатной обработки
Способ деформационно-термической обработки объемных полуфабрикатов из al-cu-mg сплавов
Матрица для высадки деталей сложного профиля
Способ повышения показателя чувствительности магниторезистивных датчиков
Способ определения коэффициента извилистости русла реки
Способ контроля местоположения и состояния контейнера с грузом
Роторная система магнитоэлектрической машины
Способ электролитно-плазменного удаления полимерных покрытий с поверхности пластинчатого торсина несущего винта вертолета
Способ разгрузки подшипников электромеханических преобразователей энергии
Железнодорожный вагон с минимизацией центробежных сил, воздействующих на железнодорожный состав
Способ упрочнения поверхности титановых сплавов в вакууме
Интеллектуальный бесконтактный мутномер

