Результат интеллектуальной деятельности: Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов
Вид РИД
Изобретение
Изобретение относится к области навигационных систем и может быть использовано для позиционирования удаленных объектов на основе информации, получаемой от двух и более пространственно разнесенных дальномерно-угломерных узлов.
Как в военных, так и гражданских областях приходится решать задачи, основанные на определении координат удаленных объектов, недоступных для непосредственного позиционирования с помощью, например, спутникового навигационного приемника (СИП). Позиционирование удаленных объектов в гражданской сфере востребовано при проведении геологоразведочных и строительных работ в условиях труднодоступности в горной, лесистой или болотистой местности. В военной области поставленные задачи решаются в целях разведки и целеуказания, при этом особенно остро стоят проблемы удобства использования, точности и достоверности получаемой информации.
В настоящее время широкое применение получили индивидуальные дальномерно-угломерные приборы (ДУП), снабженные дальномером (как правило, лазерным) и средствами для измерения вертикальных и горизонтальных углов (обычно это магнитометры). Направив луч прибора на позиционируемый объект можно получить с его помощью сферические координаты объекта по отношению к точке наблюдения, где располагается ДУП (наклонную дальность, магнитный азимут и угол места). Для определения собственных координат (привязки к местности) ДУП может непосредственно включать либо подключаются к приборам, содержащим СНП.
Позиционирование объектов удобно проводить в связанной с поверхностью земли декартовой локальной системе координат (ЛСК), переведя в нее предварительно координаты пунктов наблюдения. Затем, при необходимости, можно провести обратные преобразования из ЛСК в используемую рабочую систему координат (СК), например в систему координат Гаусса-Крюгера либо геодезическую.
Чаще всего на практике используют способ позиционирования удаленных объектов методом прямой засечки, базирующимся на найденных координатах ДУП и определенных с его помощью сферических координатах объекта: наклонной дальности, магнитного азимута и угла подъема. В ЛСК «восток-север-верх» с началом в точке наблюдения, с учетом собственных координат ДУП и магнитного склонения ,координаты объекта могут быть определены по известным формулам преобразования сферических координат в декартовы:

где ρ - наклонная дальность, β - угол магнитного азимута, α - угол подъема объекта, λ - магнитное склонение в пункте наблюдения.
Далее, при необходимости, проводят преобразование координат в выбранную СК.
Способ прост в исполнении, но имеет ряд недостатков, таких как низкая точность из-за погрешности определения магнитного азимута и магнитного склонения, невозможность использования вблизи металлических конструкций и в зонах магнитных аномалий, возможность грубой ошибки позиционирования из-за отсутствия критерия попадания луча на удаленный объект (ошибка прицеливания).
Для позиционирования с помощью ДУП может быть использован способ (ангуляция), основанный на определении углов на объект с двух позиций (Дардари Д. Методы спутникового и наземного позиционирования. Перспективы развития технологий обработки сигналов. М.: Техносфера, 2012, с. 128, 129).
Позиция определяется в ходе решения треугольника, у которого найдено основание (расстояние между позициями наблюдения) и два прилежащих к нему угла на объект.
Данный способ исключает грубую ошибку прицеливания, но сохраняются и даже могут быть ухудшены за счет двойного использования угловых измерений остальные недостатки:
- низкая точность из-за погрешности определений магнитных азимутов и магнитных склонений;
- невозможность работы вблизи металлических конструкций и в зонах магнитных аномалий.
Наиболее близким к предлагаемому способу является латерационный (основанный на определении расстояний) способ позиционирования, при котором позицию объекта определяют пересечением сфер с центрами в трех либо более позициях наблюдения и с радиусами, найденными с помощью дальномера (Дардари Д. Методы спутникового и наземного позиционирования. Перспективы развития технологий обработки сигналов. М.:Техносфера, 2012, с. 126).
Для k точек наблюдения (k≥3), если координаты в ЛСК i-й точки наблюдения обозначить (xi, yi, zi), а расстояние от нее до объекта ρi, определить позицию объекта можно в ходе решения системы уравнений:

При k=3 помимо основного решения получают и побочное решение, которое должно быть выявлено и отброшено; при k>3 имеют избыточность данных, которая позволяет избавиться от неопределенности и уточнить позицию объекта.
Этот способ более универсален и обеспечивает более высокую по сравнению с предыдущими точность позиционирования объекта за счет более высокой точности измерения линейных расстояний по сравнению с измерением угловых параметров и за счет исключения из расчетов магнитного склонения.
Недостатками данного способа является то, что для позиционирования требуется не менее трех не расположенных на одной прямой точек наблюдения (четырех - если нет логической возможности отбросить побочное решение), точность позиционирования существенно зависит от взаимного расположения точек наблюдения (геометрический фактор), которое не всегда может быть обеспечено для достижения необходимой точности в условиях наземного позиционирования с относительно плоским расположением объектов и точек наблюдения (Генике А.А., Побединский Г.Г. Глобальные спутниковые системы определения местоположения и их применение в геодезии. - М. - Картгеоцентр. - 2004. - с. 170-173), возможна грубая ошибка прицеливания из-за отсутствия критерия попадания луча ДУП на удаленный объект.
Целью изобретения является повышение точности и достоверности позиционирования объекта, а так же упрощение процедуры прицеливания за счет уменьшения точек наблюдения, ввода критерия правильного выбора этих точек и критерия попадания лучей на объект.
Для достижения цели предложен способ пространственного позиционирования удаленного объекта с помощью дальномерно-угломерных приборов, заключающийся в том, что координаты удаленного объекта определяют с использованием нескольких, предварительно измеренных с помощью дальномерно-угломерных приборов расстояний до объекта, при этом в процессе определения расстояний лучи приборов наводятся на объект с точек наблюдения, координаты которых известны. Число необходимых точек наблюдения снижено до двух, используют измеренные с помощью приборов не только расстояния, но и угловые координаты объекта (магнитные азимуты и углы подъема) по отношению к точкам наблюдения, введен критерий выбора точек наблюдения, позволяющий обеспечить необходимую точность позиционирования, введен критерий попадания лучей дальномерно-угломерных приборов на объект в процессе измерений. При этом используют измеренные с помощью дальномерно-угломерных приборов углы подъема и два расстояния до объекта для определения его координат в плане (координат X, Y на горизонтальной плоскости), используют угол подъема и расстояние до объекта, измеренные с помощью дальномерно-угломерного прибора от одной из точек наблюдения, для определения высоты расположения объекта (координата Z), используют разность магнитных азимутов на объект измеренных с помощью дальномерно-угломерных приборов с обеих точек наблюдения для проверки возможности обеспечения необходимой точности позиционирования и (при необходимости) выдачи рекомендаций по смене точки наблюдения, используют измеренные с помощью дальномерно-угломерных приборов магнитные азимуты объекта с обеих точек наблюдения и угол подъема на объект с одной из точек наблюдения для проверки попадания лучей дальномерно-угломерных приборов на объект в процессе измерения и (при необходимости) выдачи предупреждения об ошибке измерения.
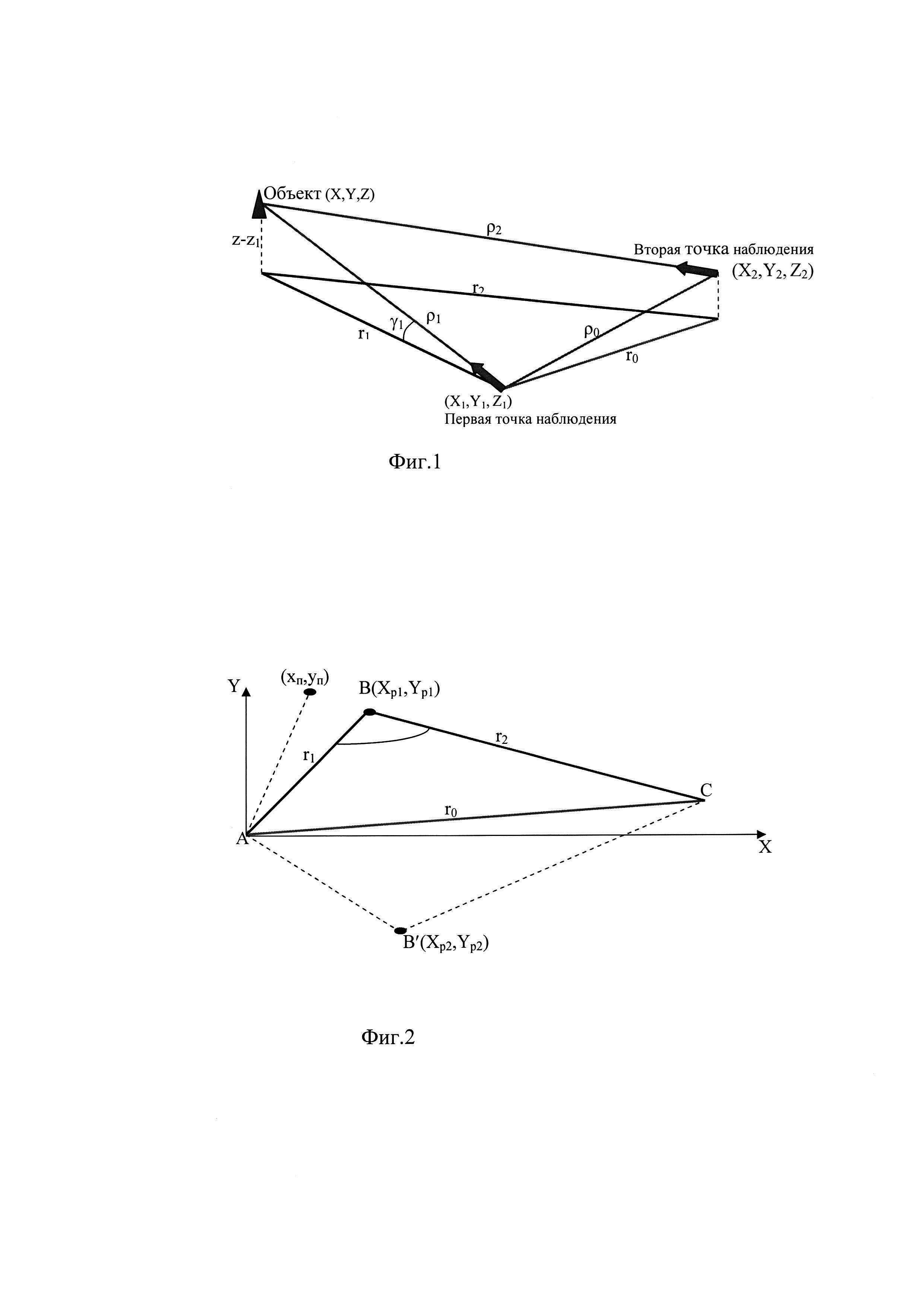
Способ вычисления координат удаленного объекта в ЛСК, центр которой совмещен с ближайшим к объекту пунктом наблюдения, состоит из следующих основных шагов (на фиг. 1 показана поясняющая схема пространственного позиционирования, а на фиг. 2 - ее горизонтальная проекция):
Шаг 1. Направляя лучи дальномерно-угломерного прибора на позиционируемый объект, с каждой из двух точек наблюдения получают два комплекта сферических координат объекта.
Шаг 2 (Предварительное позиционирование). Определяют декартовы координаты объекта методом прямой засечки (1) из ближайшего к объекту пункта наблюдения (Xп, Yп, Zп) (расчетная позиция в целях упрощения показана лишь на фиг. 2).
Шаг 3 (Проверка геометрического фактора и критерий выбора точек наблюдения). Определяют приближенный угол сходимости, как приведенной (по модулю 2π) абсолютной разности между магнитными азимутами на объект с обеих точек наблюдения (dm). Если dm выходит за обеспечивающий необходимую точность диапазон (для большинства задач этот диапазон находится в пределах 30÷150°), то выдается признак недостоверности позиционирования с рекомендацией по смене позиции наблюдения и с ориентировочными координатами прямой засечки: X=Xп, Y=Yп, Z=Zп. Прекращают процедуру вычислений.
Шаг 4. Проецируют на горизонтальную плоскость треугольник, образованный расстоянием между пунктами наблюдения (ρ0) и дистанциями от пунктов наблюдения до объекта (ρ1, ρ2):

Шаг 5. Определяют по трем сторонам полученного треугольника (r0, r1, r2) угол при вершине (фиг. 2):

Шаг 6 (критерий попадания лучей на объект). Проводят сравнение между полученным углом при вершине (В) и dm (см. шаг 2). Если сравниваемые значения отличаются друг от друга на допустимую пороговую величину, то осуществляют переход к следующему шагу, в противном случае выдается признак ошибочности засечки и процедуру вычислений прекращают.
Шаг 6. Пересечением окружностей определяют два варианта координат в плане (координат на горизонтальной плоскости) точки схода лучей (фиг. 2):

Из 2-х полученных в ходе решения системы уравнений (5) расчетных решений B(Xp1, Yp1), B'(Xp2, Yp2) оставляют вариант (X, Y), ближайший к точке (Xп, Yп). Фиксируют высоту объекта: Z=Zп. Процедуру вычислений заканчивают.
Достигаемым техническим результатом предлагаемого способа позиционирования удаленного объекта является повышение точности и достоверности позиционирования объекта, а также упрощение процедуры позиционирования за счет уменьшения точек наблюдения, ввода критерия правильного выбора этих точек и критерия попадания лучей на объект в процессе измерения.
Способ утилизации отработанного раствора анодного оксидирования алюминия и его сплавов
Способ контроля аппаратуры комплексов телекодовой связи
Способ позиционирования подвижного объекта
Способ кодовой цикловой синхронизации с мягкими решениями
Способ передачи многоблочных сообщений в комплексах телекодовой связи
Способ передачи многоблочных сообщений каскадным кодом в комплексах связи
Способ восстановления хрома(+6) в жидких отходах гальванического производства
Способ тактовой цифровой синхронизации
Способ позиционирования подвижного объекта на основе видеоизображений
Способ получения дигидрата бис(дигидродифосфато)купрата(ii) калия и его использование в промышленности
Способ утилизации отработанного раствора анодного оксидирования алюминия и его сплавов
Способ позиционирования подвижного объекта
Способ позиционирования подвижного объекта на основе видеоизображений
Способ формирования и расформирования текста сообщения в информационных бинарных в пакетах прикладного уровня
Способ контроля поступательного перемещения звеньев механизма с помощью инклинометров

