Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПЕРВИЧНЫМ МАГНИТНЫМ ПОТОКОМ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к методике управления синхронным электродвигателем, содержащим обмотку возбуждения и якорь.
В частности, настоящее изобретение относится к методу управления поворотным электрическим двигателем на основе так называемого первичного магнитного потока, представляющего собой синтез магнитного потока, который генерируется полем, и магнитного потока реакции якоря, генерируемого током якоря, протекающим в обмотке якоря.
Уровень техники
Традиционно предлагаются различные устройства управления поворотным электрическим двигателем на основе первичного магнитного потока, т.е. так называемые устройства управления первичным магнитным потоком. Коротко говоря, управление первичным магнитным потоком является методом устойчивого регулирования поворотного электрического двигателя путем управления магнитным потоком поворотного электрического двигателя в соответствии со значением его команды.
Считается, например, что фаза потока Λ0 поля используется на оси d во вращающейся системе координат, фаза первичного магнитного потока [λ1] (он рассматривается как вектор, имеющий направление и амплитуду) используется на оси δ в другой вращающейся системе координат, а разность фаз оси δ относительно оси d является нагрузочным углом φ. Необходимо отметить, что в данном случае ось γ используется при опережающей фазе 90° относительно оси δ. Кроме того, ось δс и ось γс определяются как оси управления во вращающейся системе координат, которая используется при управлении первичным магнитным потоком [λ1]. Ось δс и ось γс соответствуют оси δ и оси γ соответственно, а разность фаз оси δс относительно оси d принимается равной φс.
В этом случае значение [Λ1*] команды первичного магнитного потока [λ1] (именуемое далее «значением команды первичного магнитного потока») (оно рассматривается как вектор, имеющий направление и амплитуду) имеет положительную величину Λδ* как составляющую по оси δс, а составляющая по оси γс является нулевой. Следовательно, когда первичный магнитный поток [λ1] совпадает со значением [Λ1*] команды первичного магнитного потока, составляющая λ1δс по оси δс первичного магнитного потока [λ1] равна положительному значению Λδ* (оно также является амплитудой значения [Λ1*] команды первичного магнитного потока), разность φс фаз равна нагрузочному углу φ, а ось δс совпадает с осью δ.
При управлении первичным магнитным потоком управление, например, подлежащим корректировке значением команды напряжения выполняется таким образом, что не только составляющая λ1δс по оси δс первичного магнитного потока [λ1] должна быть приравнена к амплитуде Λδ* значения [Λ1*] команды первичного магнитного потока, но и его составляющая λ1γс по оси γс должна быть нулевой. Разность φс фаз при этом совпадает с нагрузочным углом φ.
Таким образом, при управлении первичным магнитным потоком амплитуда Λδ первичного магнитного потока [λ1] приравнивается к амплитуде Λδ* значения [Λ1*] команды, а разность φс фаз устанавливается совпадающей с нагрузочным углом φ, благодаря чему крутящий момент Т поворотного электродвигателя может регулироваться пропорционально составляющей iγc амплитуды ia тока якоря по оси γc независимо от скорости угла вращения. Обычно регулирование осуществляется исходя из того, что амплитуда Λδ* постоянна.
В частности, число n пар полюсов, амплитуда ia тока, фаза (так называемая фаза тока) β относительно оси q (это 90-градусная опережающая фаза относительно оси d) тока якоря и амплитуда Λδ вводятся в нижеследующее выражение (1) для нахождения крутящего момента Т.
T=n⋅Λδ⋅iγ=n⋅Λδ⋅ia⋅cos(φ-β) (1)
Необходимо отметить, что среди нижеследующих документов известного уровня техники в Непатентном документе 6 заменяются и используются ось δ и ось γ по сравнению с указанными осями в нижеследующих прочих документах известного уровня техники.
Документы известного уровня техники
Патентные документы
Патентный документ 1: Патент Японии № 3672761.
Патентный документ 2: Выложенная заявка на патент Японии № 4-91693 (1992).
Непатентные документы
Непатентный документ 1: Hotta, Asano, and Tsunehiro, “Method of controlling Position Sensorless DC brushless motor” (Хотта, Асано и Цунехиро «Способ управления не имеющим датчиков положения бесщеточным электродвигателем постоянного тока»), 1988, Tokai-Section Joint Conference of the Institutes of Electrical and Related Engineers, с. 161.
Непатентный документ 2: Kaku and Tsunehiro, “A Novel Technique for a DC Brushless Motor Having No Position-Sensors” (Каку и Цунехиро «Новый метод для бесщеточного электродвигателя постоянного тока, не имеющего датчиков положения»), 1990, Tokai-Section Joint Conference of the Institutes of Electrical and Related Engineers, с. 172.
Непатентный документ 3: Kaku, Yamamura, and Tsunehiro “A Novel Technique for a DC Brushless Motor Having No Position-Sensors” (Каку, Ямамура и Цунехиро «Новый метод для бесщеточного электродвигателя постоянного тока, не имеющего датчиков положения»), IEEJ Transaction on Industry Application, 1991, том 111, № 8, с. 639-644.
Непатентный документ 4: Urita, Tsukamoto, and Tsunehiro, “Constant estimation method for synchronous machines with the primary magnetic flux controlled” (Урита, Цукамото и Цунехиро «Метод постоянной оценки для синхронных машин с управлением первичным магнитным потоком»), 1998, Tokai-Section Joint Conference of the Institutes of Electrical and Related Engineers, с. 101.
Непатентный документ 5: Urita, Yamamura, and Tsunehiro, “On General Purpose Inverter for Synchronous Motor Drive” (Урита, Ямамура и Цунехиро «Об универсальном инверторе для синхронного привода»), IEEJ Transaction on Industry Application, 1999, том 119, № 5, с. 707-712.
Непатентный документ 6: Yabe and Sakanobe, “A Sensor-less Drive of IPM Motor with Over-modulation PWM” (Ябе и Саканобе «Не имеющий датчиков привод электродвигателя IPM, содержащего широтно-импульсный модулятор с перемодуляцией»), доклады на техническом совещании по вращающимся механизмам, IEE Japan, 2001 (159), с. 7-12.
Непатентный документ 7: Takeda, Matsui, Morimoto, and Honda, “Design and Control of Interior Permanent Magnet Synchronous Motor” (Такеда, Мацуи, Моримото и Хонда «Конструкция и управление внутреннего синхронного электродвигателя с постоянным магнитом»), Ohmsha, 2001, с. 23-26.
Сущность изобретения
Задачи, решаемые с помощью изобретения
При управлении поворотным электрическим двигателем традиционно требуется так называемое управление с максимальным крутящим моментом/током, при котором отношение T/ia максимизировано. С помощью управления вектором тока находится фаза β тока, которая максимизирует амплитуду ia, когда крутящий момент является постоянным (например, см. Непатентный документ 7).
С другой стороны, чтобы установить надлежащую фазу β тока при управлении первичным магнитным потоком, требуется подход, отличный от управления вектором тока. Это вызвано тем, что управление фазой тока не может осуществляться непосредственно, как при управлении вектором тока. Однако такой подход до сих пор неизвестен.
Поскольку при управлении магнитным потоком управление обычно выполняется при постоянной амплитуде первичного магнитного потока, управление с эффективной фазой тока не выполняется, если крутящий момент в некоторых случаях флуктуирует.
Настоящее изобретение сделано с учетом приведенных выше замечаний, и его задачей является создание метода надлежащего управления фазой тока путем изменения значения команды первичного магнитного потока в соответствии с крутящим моментом при управлении первичным магнитным полем и приведения в действие поворотного электродвигателя в эффективной рабочей точке в соответствии с крутящим моментом.
Средства решения задач
Способ управления первичным магнитным потоком в соответствии с настоящим изобретением представляет собой способ, включающий в себя установку значения ([Λ1*]) команды первичного магнитного потока, представляющего собой значение команды первичного магнитного потока ([λ1]), в поворотном электродвигателе, содержащем якорь, имеющий обмотку якоря, и ротор, представляющий собой обмотку возбуждения, вращающуюся относительно якоря; и управление первичным магнитным потоком в соответствии со значением команды первичного магнитного потока.
Первичный магнитный поток представляет собой синтез потока (Λ0) обмотки возбуждения, который генерируется обмоткой возбуждения, и магнитного потока ([λa]: id⋅Ld, iq⋅Lq) реакции якоря, генерируемого током (ia) якоря, протекающим в якоре.
В первом аспекте значение команды первичного магнитного потока изменяется в соответствии с крутящим моментом (Т) поворотного электродвигателя для поддержания фазы (β) тока якоря относительно оси q, которая опережает на π/2 ось d, в фазе (синфазно) с потоком (Λ0) обмотки возбуждения, являющейся необходимой фазой в соответствии с крутящим моментом.
В соответствии со вторым аспектом способа управления первичным магнитным потоком настоящего изобретения, в первом аспекте на основе соотношений между первичным магнитным потоком ([λ1]), током (ia) якоря и крутящим моментом (Т) поворотного электродвигателя амплитуда (Λδ0(Т)) первичного магнитного потока, который минимизирует ток якоря, устанавливается в качестве амплитуды (Λδ*) значения ([Λ1*]) команды первичного магнитного потока в соответствии с крутящим моментом.
В соответствии с третьим аспектом способа управления первичным магнитным потоком настоящего изобретения, во втором аспекте соотношения определяются следующим образом: T = n⋅Λδ⋅ia⋅cos(φ-β), Λδ⋅sinφ = Lq⋅iq, Λδ⋅cosφ = Ld⋅id+Λ0, tanβ = -id/iq, ia = √(id2+iq2), где вводятся нагрузочный угол φ относительно оси d первичного магнитного потока ([λ1]), фаза β тока относительно оси q тока (ia) якоря, амплитуда Λ0 потока обмотки возбуждения, амплитуда Λδ первичного магнитного потока, индуктивность Ld по оси d и индуктивность Lq по оси q поворотного электродвигателя, составляющая id по оси d и составляющая iq по оси q тока якоря, число n пар полюсов поворотного электродвигателя и крутящий момент Т.
В соответствии с четвертым аспектом способа управления первичным магнитным потоком настоящего изобретения, во втором аспекте или в третьем аспекте на основе соотношения между током якоря, принимающим минимальное значение относительно первичного магнитного потока, и крутящим моментом значение команды первичного магнитного потока устанавливается по току якоря.
В соответствии с пятым аспектом способа управления первичным магнитным потоком настоящего изобретения, во втором аспекте или в третьем аспекте на основе соотношения между синфазной составляющей (iδ) и крутящим моментом, причем синфазная составляющая находится в фазе с первичным магнитным потоком в токе якоря, принимающем минимальное значение относительно первичного магнитного потока, значение команды первичного магнитного потока устанавливается по синфазной составляющей тока якоря.
В соответствии с шестым аспектом способа управления первичным магнитным потоком настоящего изобретения, во втором аспекте или в третьем аспекте на основе соотношения между ортогональной составляющей (iγ) и крутящим моментом, причем ортогональная составляющая перпендикулярна первичному магнитному потоку в токе якоря, принимающем минимальное значение относительно первичного магнитного потока, значение команды первичного магнитного потока устанавливается по ортогональной составляющей тока якоря.
В соответствии с седьмым аспектом способа управления первичным магнитным потоком настоящего изобретения, в третьем аспекте на основе соотношения между нагрузочным углом (φ) и крутящим моментом, причем нагрузочный угол определяется магнитным потоком реакции якоря, генерируемого током якоря, принимающим минимальное значение относительно первичного магнитного потока, и потоком обмотки возбуждения, значение команды первичного магнитного потока устанавливается по нагрузочному углу.
В соответствии с восьмым аспектом способа управления первичным магнитным потоком настоящего изобретения, в первом аспекте на основе соотношения между первичным магнитным потоком ([λ1]), потерями поворотного электродвигателя, крутящим моментом (Т) и скоростью вращения поворотного электродвигателя первичный магнитный поток, который минимизирует потери, устанавливается в качестве значения команды первичного магнитного потока в соответствии с крутящим моментом и скоростью вращения.
В соответствии с девятым аспектом способа управления первичным магнитным потоком настоящего изобретения, в любом из аспектов с первого по восьмой период обновления значения команды первичного магнитного потока отличается от периода управления первичным магнитным потоком на основе значения команды первичного магнитного потока.
В соответствии с десятым аспектом способа управления первичным магнитным потоком настоящего изобретения, в любом из аспектов с первого по восьмой значение команды первичного магнитного потока не изменяется в переходном периоде управления первичным магнитным потоком на основе значения команды первичного магнитного потока, а обновляется в состоянии, когда управление является устойчивым.
В соответствии с одиннадцатым аспектом способа управления первичным магнитным потоком настоящего изобретения, в четвертом аспекте значение команды первичного магнитного потока изменяется в соответствии с крутящим моментом (Т) поворотного электродвигателя, обрабатываемым с помощью фильтра нижних частот.
В соответствии с двенадцатым аспектом способа управления первичным магнитным потоком настоящего изобретения, в пятом аспекте значение команды первичного магнитного потока изменяется в соответствии с синфазной составляющей (iδ), обрабатываемой с помощью фильтра нижних частот.
В соответствии с тринадцатым аспектом способа управления первичным магнитным потоком настоящего изобретения, в шестом аспекте значение команды первичного магнитного потока изменяется в соответствии с ортогональной составляющей (iγ), обрабатываемой с помощью фильтра нижних частот.
В соответствии с четырнадцатым аспектом способа управления первичным магнитным потоком настоящего изобретения, в седьмом аспекте значение команды первичного магнитного потока изменяется в соответствии с нагрузочным углом (φ), обрабатываемым с помощью фильтра нижних частот.
В соответствии с аспектами способа управления первичным магнитным потоком настоящего изобретения с первого по четырнадцатый, например, значение команды первичного магнитного потока изменяется в соответствии с расчетным значением крутящего момента.
Эффекты изобретения
В соответствии с первым аспектом способа управления первичным магнитным потоком настоящего изобретения, изменение значения команды первичного магнитного потока в соответствии с крутящим моментом обеспечивает надлежащее управление фазой тока, при этом поворотный электродвигатель должен приводиться в действие в эффективной рабочей точке в соответствии с крутящим моментом.
В соответствии с аспектами способа управления первичным магнитным потоком настоящего изобретения со второго по седьмой, виду того, что ток якоря имеет минимальное значение относительно первичного магнитного потока при условии постоянного крутящего момента, используемого в качестве значения команды первичного магнитного потока, соответствующего минимальному значению, может быть реализовано управление с максимальным крутящим моментом/током. В соответствии с восьмым аспектом способа управления первичным магнитным потоком настоящего изобретения, ввиду того, что потери имеют минимальное значение относительно первичного магнитного потока при условии постоянного крутящего момента и постоянной скорости вращения, используемых в качестве значения команды первичного магнитного потока, соответствующего минимальному значению, реализуется управление с максимальной эффективностью.
В соответствии с девятым аспектом способа управления первичным магнитным потоком настоящего изобретения, помехи между установкой значения команды первичного магнитного потока и управлением первичным магнитным потоком подавляются.
В соответствии с десятым аспектом способа управления первичным магнитным потоком настоящего изобретения, даже в тех случаях, когда значение команды первичного магнитного потока изменяется, трудно ухудшить устойчивость управления первичным магнитным потоком.
В соответствии с аспектами способа управления первичным магнитным потоком настоящего изобретения с одиннадцатого по четырнадцатый, влияние на само управление первичным магнитным потоком путем установки амплитуды значения команды первичного магнитного потока может быть уменьшено.
Цель, признаки, аспекты и преимущества настоящего изобретения станут более понятными из нижеследующего подробного описания и прилагаемых чертежей.
Краткое описание чертежей
Фиг. 1 и 2 представляют собой векторные диаграммы для описания управления первичным магнитным потоком;
Фиг. 3 представляет собой график, иллюстрирующий соотношения между амплитудой первичного магнитного потока, амплитудой тока якоря и нагрузочным углом;
Фиг. 4 представляет собой график, иллюстрирующий соотношения между амплитудой первичного магнитного потока, амплитудой тока якоря и фазой тока;
Фиг. 5 и 6 представляют собой блок-схемы, иллюстрирующие конфигурацию для получения амплитуды значения команды первичного магнитного потока;
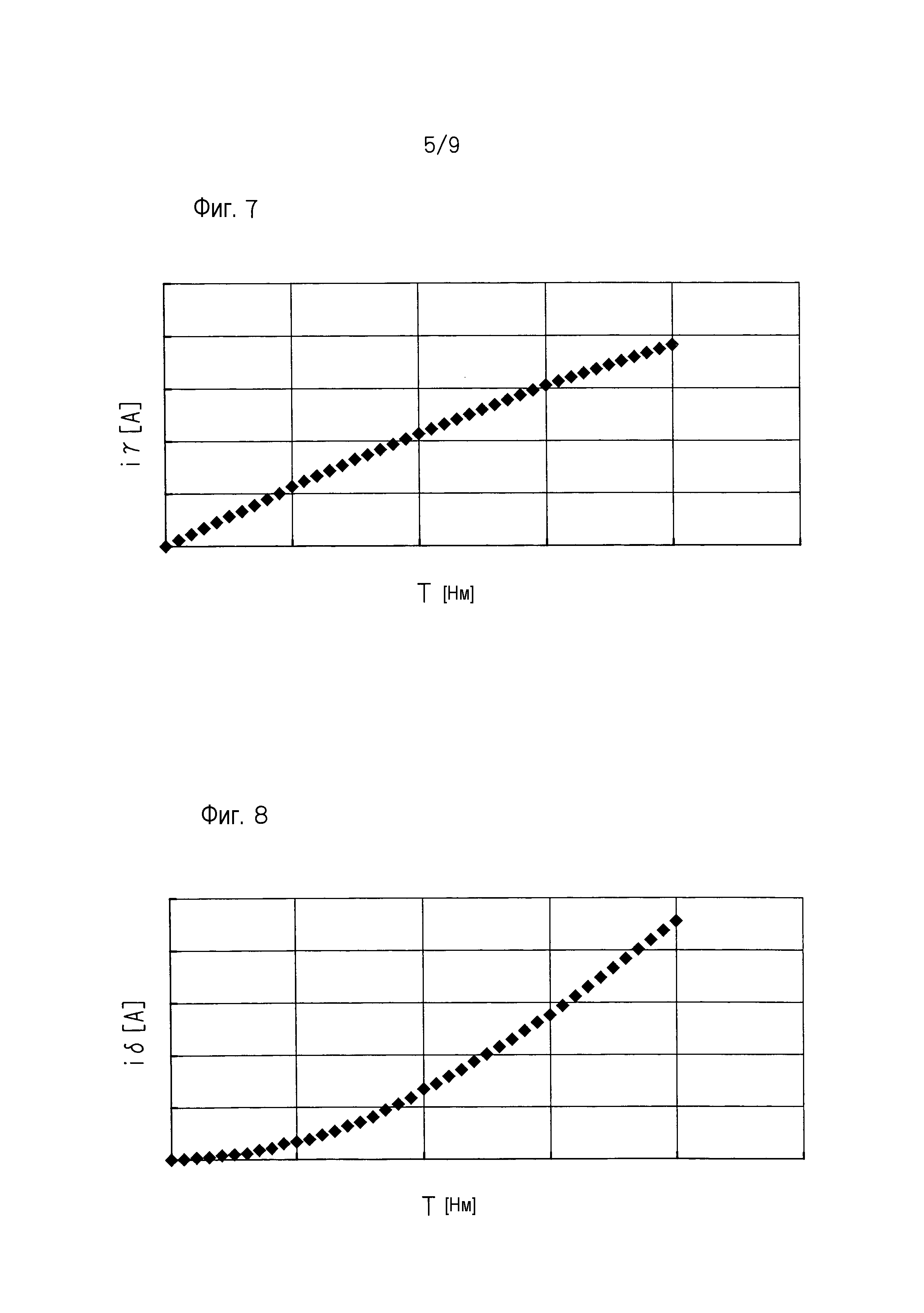
Фиг. 7 представляет собой график, иллюстрирующий соотношение между крутящим моментом и составляющей по оси γ амплитуды тока якоря в рабочей точке, в которой реализуется максимальный крутящий момент/ток;
Фиг. 8 представляет собой график, иллюстрирующий соотношение между крутящим моментом и составляющей по оси δ амплитуды тока якоря в рабочей точке, в которой реализуется максимальный крутящий момент/ток;
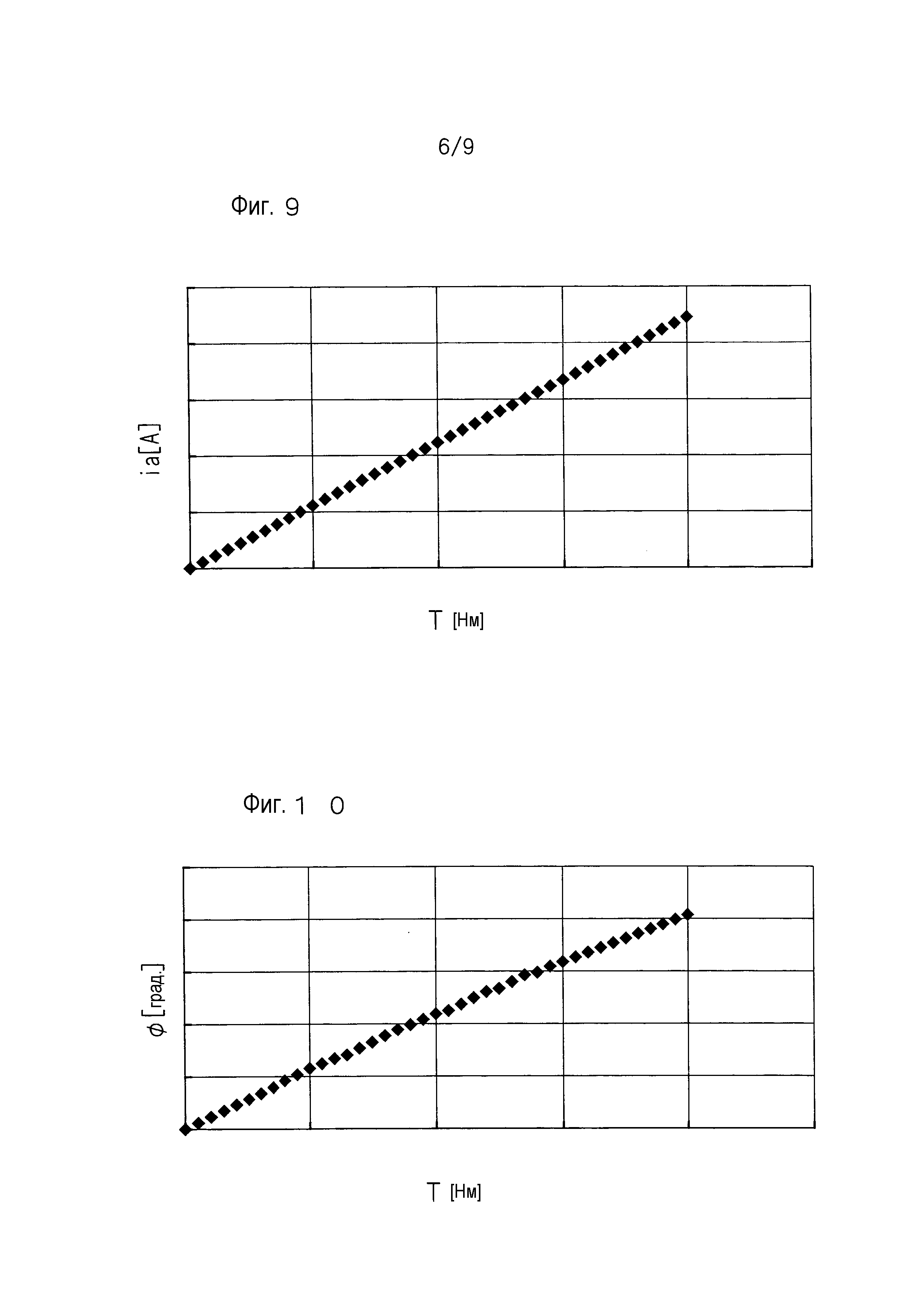
Фиг. 9 представляет собой график, иллюстрирующий соотношение между крутящим моментом и амплитудой тока якоря в рабочей точке, в которой реализуется максимальный крутящий момент/ток;
Фиг. 10 представляет собой график, иллюстрирующий соотношение между крутящим моментом и нагрузочным углом в рабочей точке, в которой реализуется максимальный крутящий момент/ток;
Фиг. 11–13 представляют собой блок-схемы, иллюстрирующие конфигурацию для получения амплитуды значения команды первичного магнитного потока;
Фиг. 14 представляет собой график, иллюстрирующий соотношение между составляющей iδ по оси δ и амплитудой первичного магнитного потока в рабочей точке, в которой реализуется максимальный крутящий момент/ток;
Фиг. 15 представляет собой график, иллюстрирующий соотношение между составляющей iγ по оси γ и амплитудой первичного магнитного потока в рабочей точке, в которой реализуется максимальный крутящий момент/ток;
Фиг. 16 представляет собой график, иллюстрирующий потери относительно амплитуды первичного магнитного потока; и
Фиг. 17 представляет собой блок-схему, иллюстрирующую конфигурацию для получения амплитуды значения команды первичного магнитного потока.
Описание вариантов осуществления
В нижеследующих вариантах осуществления поворотный электродвигатель содержит якорь, имеющий обмотку якоря, и ротор, представляющий собой обмотку возбуждения, вращающуюся относительно якоря. Поворотный электродвигатель снабжен постоянным магнитом или обмоткой возбуждения, которая генерирует поток поля.
Первый вариант осуществления
Фиг. 1 и 2 представляют собой векторные диаграммы для описания управления первичным магнитным потоком.
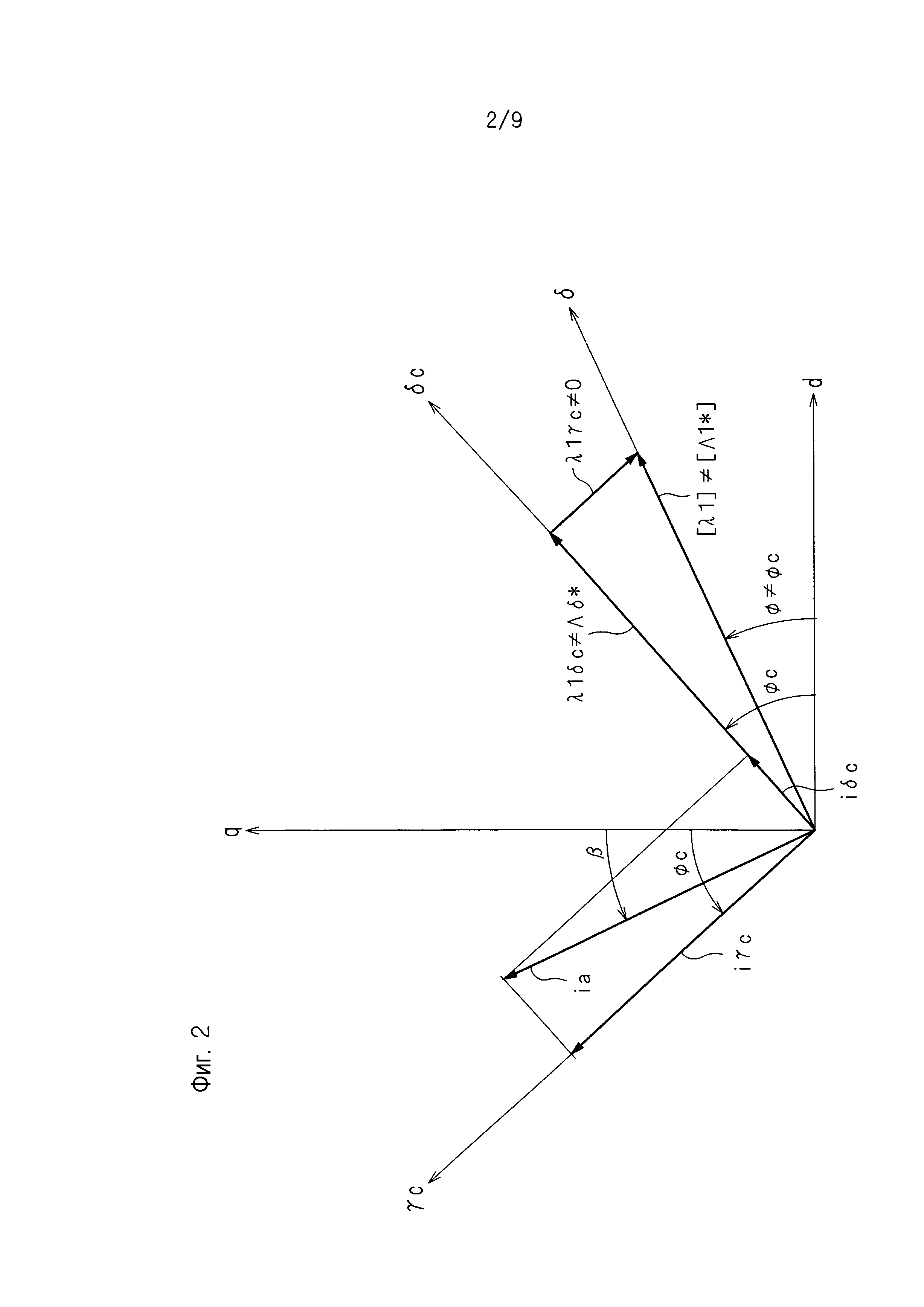
При управлении первичным магнитным потоком устанавливается система координат δс-γс, которая опережает по фазе систему координат d-q (ось d находится в фазе с потоком Λ0 поля, а ось q имеет 90-градусное опережение по фазе относительно оси d), использующую в качестве опорной фазу потока Λ0 поля (т.е. вращение ротора), на разность φс фаз. При этом напряжение, подаваемое на поворотный электродвигатель, регулируется таким образом, чтобы ось δс совпадала с осью δ, которая находится в фазе с первичным магнитным потоком.
Сначала на фиг. 1 изображен случай, в котором разность φс фаз совпадает с нагрузочным углом φ. Как показано на фиг. 1, магнитный поток [λа] (он рассматривается как вектор, имеющий направление и амплитуду) реакции якоря является синтезом магнитного потока Lq⋅iq в положительном направлении оси q и магнитного потока Ld⋅id в отрицательном направлении оси d.
При этом первичный магнитный поток [λ1] является синтезом магнитного потока [λа] и потока Λ0 обмотки возбуждения и принимает положительное значение Λδ (оно совпадает с амплитудой Λδ* значения команды первичного магнитного потока) по оси δ.
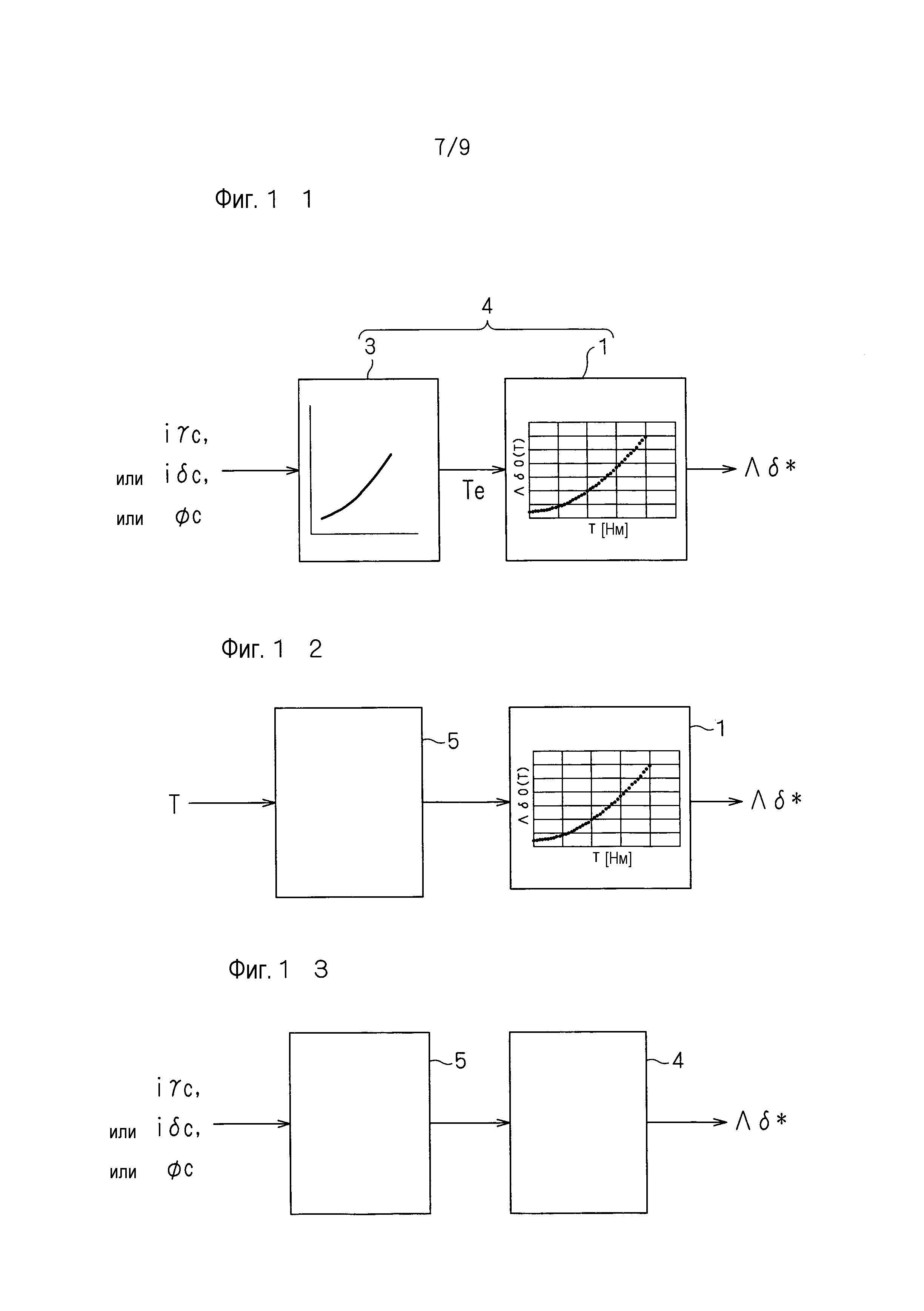
Необходимо отметить, что если первичный магнитный поток [λ1] не совпадает со значением [Λ1*] команды первичного магнитного потока, в некоторых случаях возникает расхождение между разностью φс фаз и нагрузочным углом φ, как показано на фиг. 2.
Во вращающейся системе координат δс-γс, в которой осуществляется управление первичным магнитным потоком, управление осуществляется таким образом, что составляющая λ1δс по оси δс первичного магнитного потока [λ1] должна совпадать с составляющей Λδ* по оси δс значения [Λ1*] команды первичного магнитного потока, а составляющая λ1γс по оси γс первичного магнитного потока [λ1] должна совпадать с составляющей Λγ* (=0) по оси γс значения [Λ1*] команды первичного магнитного потока.
Для тока якоря его фаза опережает ось q на фазу β тока, а его амплитуду ia можно разложить на составляющую iq по оси q и составляющую id по оси d. Аналогичным образом его амплитуду ia можно разложить на составляющую iγс по оси γс и составляющую iδс по оси δс. На фиг. 1 изображен случай, в котором ось γс совпадает с осью γ, и поэтому показана составляющая iγ, соответствующая составляющей iγс по оси γс. В данном случае, чтобы избежать усложнения чертежей, на фиг. 1 не показана составляющая, соответствующая составляющей iδс по оси δс, а на фиг. 2 не показаны составляющая iq по оси q и составляющая id по оси d.
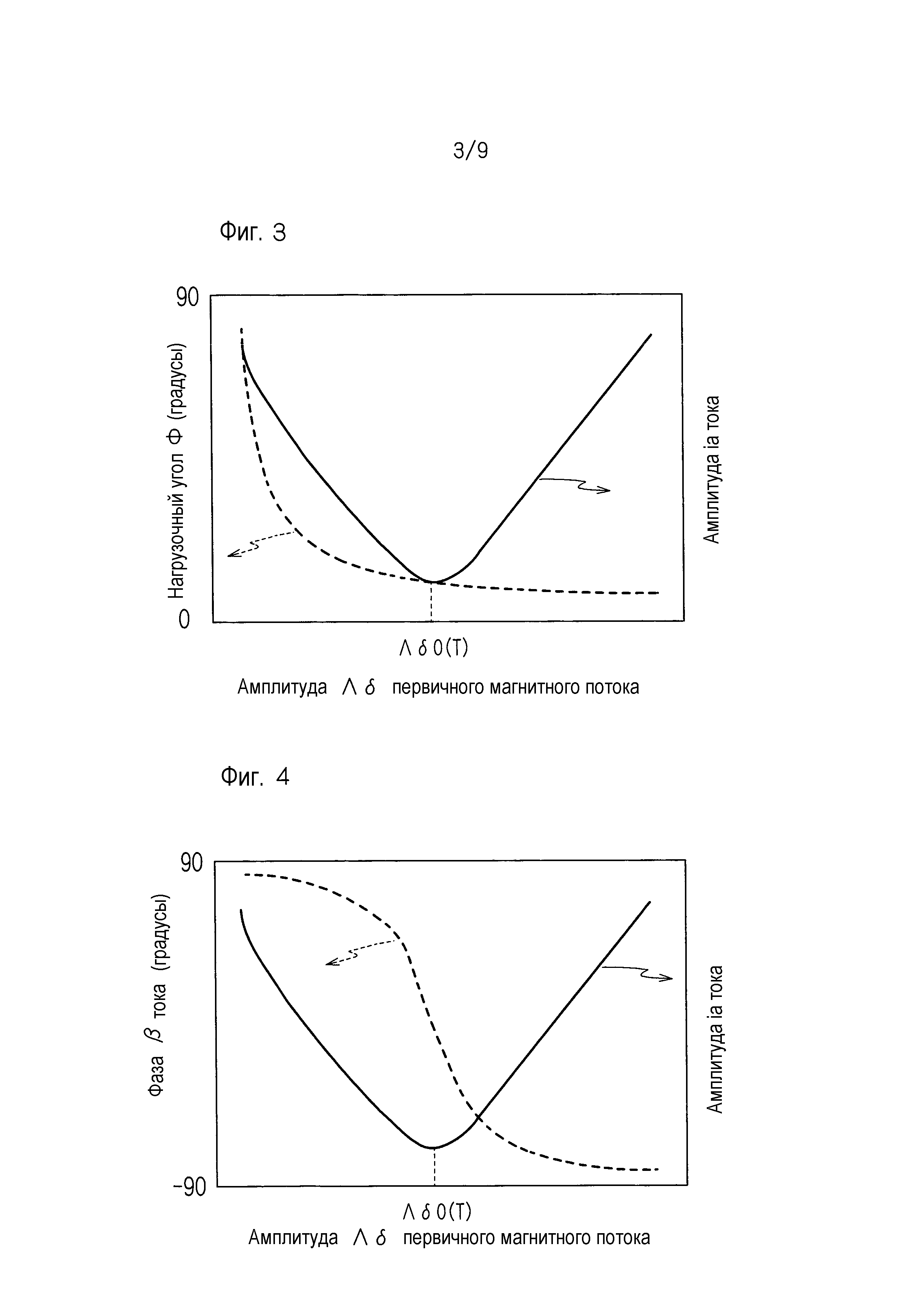
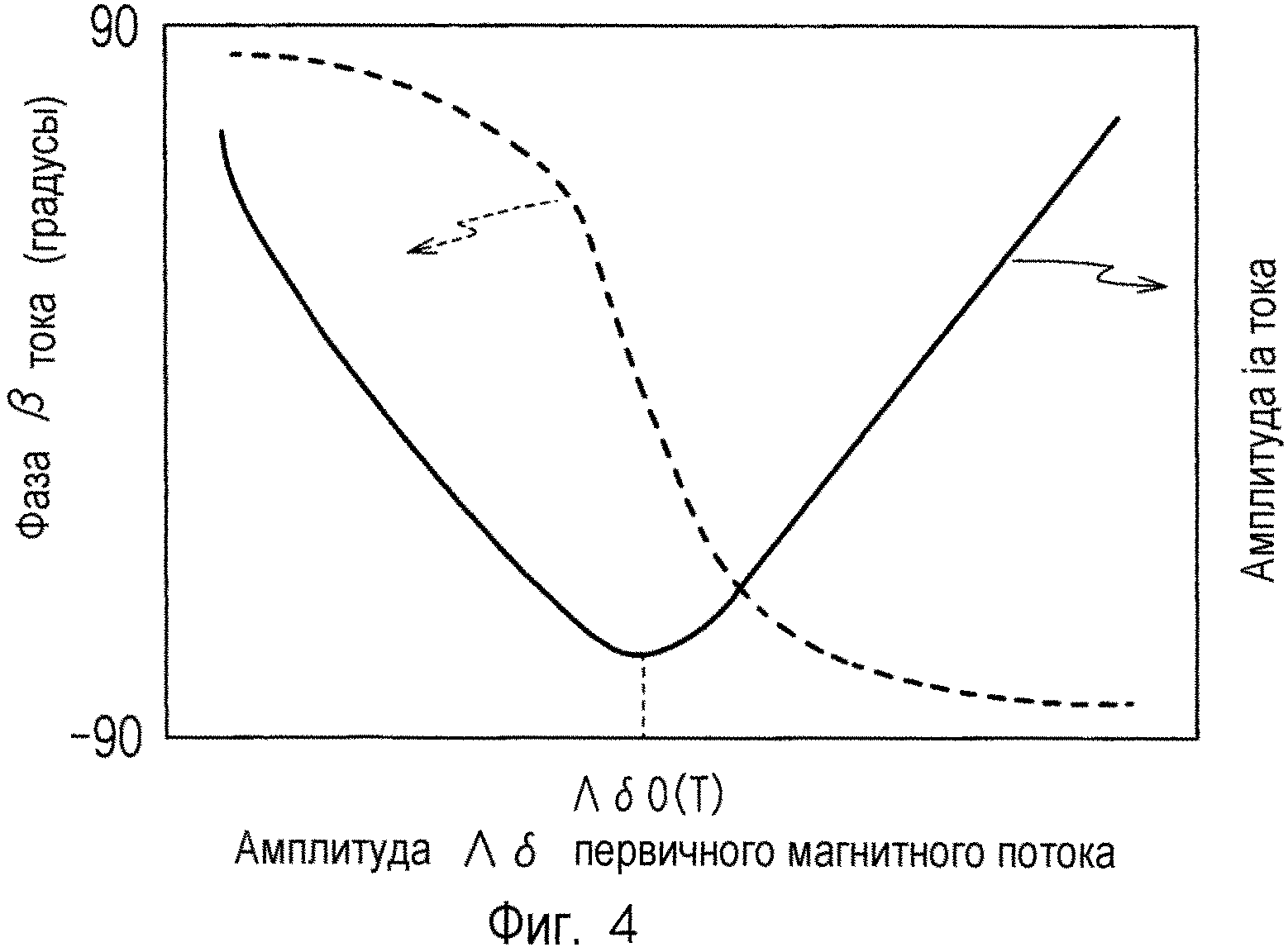
Фиг. 3 представляет собой график, иллюстрирующий соотношения между положительной величиной Λδ, являющейся амплитудой первичного магнитного потока [λ1], амплитудой ia тока якоря и нагрузочным углом φ в тех случаях, когда крутящий момент Т поддерживается на некотором постоянном уровне. Ясно, что амплитуда ia имеет значение локального минимума относительно положительной величины Λδ. Управление первичным магнитным потоком осуществляется с помощью вышеописанной положительной величины Λδ, которая дает вышеописанное значение локального минимума амплитуды ia (он показан как величина Λδ0(Т)), благодаря чему может быть реализовано управление с максимальным крутящим моментом/током.
При управлении первичным магнитным полем ввиду того, что, как описано выше, не только составляющая λ1δс по оси δс первичного магнитного потока [λ1] устанавливается совпадающей с положительной величиной Λδ*, но и составляющая λ1γс по оси γс первичного магнитного потока [λ1] устанавливается совпадающей с составляющей 0 по оси γ значения [Λ1*] команды первичного магнитного потока, установка только положительной величиной Λδ* равной величине Λδ0(Т) обеспечивает однозначное определение как амплитуды Λδ, так и нагрузочного угла φ в первичном магнитном потоке [λ1].
Определение первичного магнитного потока [λ1] приводит к однозначному определению магнитного потока [λа], поскольку поток Λ0 обмотки возбуждения является постоянным (см. фиг. 1). Магнитные потоки Lq⋅iq, Ld⋅id, образующие магнитный поток [λа], пропорциональны составляющей iq по оси q и составляющей id по оси d тока якоря соответственно, при этом коэффициенты Lq, Ld пропорциональности определяются на основе индуктивностей поворотного электродвигателя. Следовательно, только определение положительной величины Λδ*, принимающей значение Λδ0(Т) относительно некоторого крутящего момента Т, обеспечивает надлежащее управление фазой β тока без необходимости повторного выполнения вычисления, такого как управление вектором тока. Фиг. 4 представляет собой график, иллюстрирующий соотношения между положительной величиной Λδ, амплитудой ia и фазой β тока в тех случаях, когда крутящий момент Т поддерживается на некотором постоянном уровне.
Очевидно, величина Λδ0(Т) принимает различные значения в зависимости от крутящего момента Т. При этом для различных крутящих моментов Т соотношение между амплитудой Λδ первичного магнитного потока и амплитудой ia тока якоря находится заранее, благодаря чему величина Λδ0(Т), получаемая в соответствии с крутящим моментом, может использоваться в качестве амплитуды Λδ* значения команды первичного магнитного потока. Это позволяет реализовать управление максимальным крутящим моментом/током при управлении первичным магнитным потоком. Иными словами, значение [Λ1*] команды первичного магнитного потока изменяется в соответствии с крутящим моментом Т для выполнения управления первичным магнитным потоком, благодаря чему управление фазой β тока может осуществляться с целью получения необходимой фазы в соответствии с крутящим моментом Т.
Если, как на известном уровне техники, осуществляется управление первичным магнитным потоком при постоянной амплитуде Λδ* значения [Λ1*] команды первичного магнитного потока, поворотный электродвигатель в некоторых случаях приводится в действие в неэффективной рабочей точке относительно крутящего момента Т. В отличие от этого, в вышеописанном методе изменение амплитуды Λδ* в соответствии с крутящим моментом Т обеспечивает надлежащее управление фазой β тока, при этом поворотный электродвигатель приводится в действие в эффективной рабочей точке относительно крутящего момента Т.
В частности, использование величины Λδ0(Т) в качестве амплитуды Λδ* позволяет реализовать управление максимальным крутящим моментом/током. Необходимо отметить, что управление первичным магнитным потоком после получения амплитуды Λδ* вкратце описано выше и хорошо известно, поэтому в данном случае подробные описания действия и конфигураций, требуемых для действия, не приводятся.
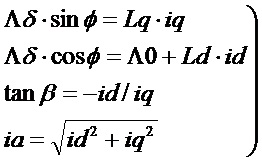
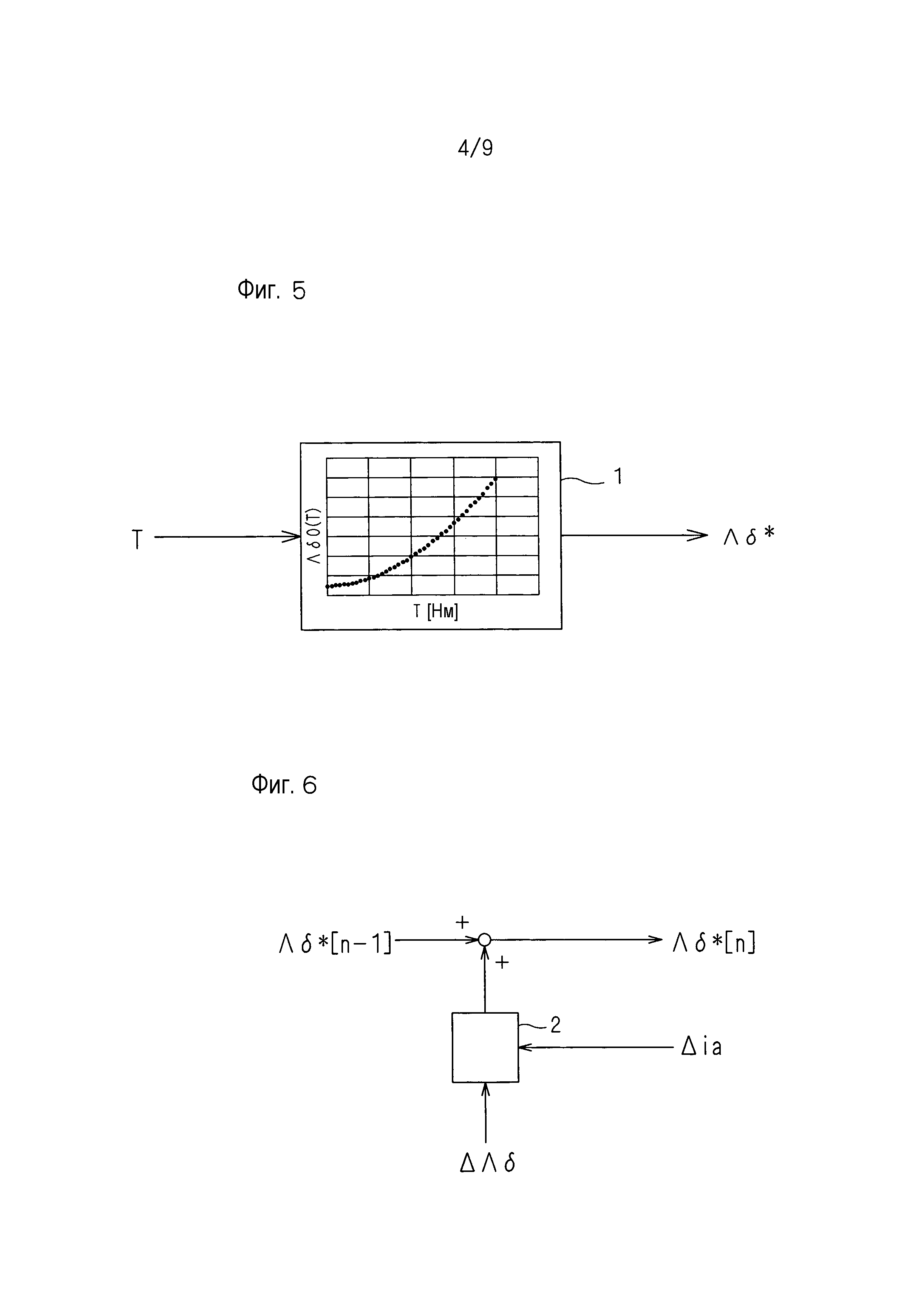
Фиг. 5 представляет собой блок-схему, иллюстрирующую конфигурацию для получения вышеописанной амплитуды Λδ*. Блок 1 установки значения команды первичного магнитного потока запоминает соотношения между амплитудой Λδ первичного магнитного потока [λ1], амплитудой ia тока якоря и крутящим моментом Т поворотного электродвигателя. Величина Λδ0(Т), которая минимизирует амплитуду ia, выдается в виде амплитуды Λδ* значения [Λ1*] команды первичного магнитного потока в соответствии с крутящим моментом Т.
На фиг. 5 показано изображение, на котором соотношения между амплитудой ia и величиной Λδ0(Т), показанными на фиг. 3 и 4, запоминаются в отношении различных крутящих моментов Т в блоке 1 установки значения команды первичного магнитного потока.
В качестве альтернативы, блок 1 установки значения команды первичного магнитного потока выполняет вычисление на основе вышеописанного соотношения для выдачи амплитуды Λδ*. Хорошо известно, что существует приведенное в нижеследующем выражении (2) соотношение между амплитудой Λδ первичного магнитного потока, коэффициентами Lq, Ld пропорциональности, нагрузочным углом φ, амплитудой ia тока якоря, составляющей iq по оси q, составляющей id по оси d и фазой β тока. Однако существует соотношение iγ = iq⋅cosφ-id⋅sinφ.
 (2)
(2)
Таким образом, путем вычисления выражений (1) и (2) может быть найдено значение Λδ0(Т) первичной амплитуды Λδ, которое минимизирует амплитуду ia для каждого крутящего момента Т.
Необходимо отметить, что для крутящего момента Т может использоваться найденное значение. В качестве альтернативы, может использоваться расчетное значение Т^. Расчетное значение Т^ находится с помощью нижеследующего выражения (3) применительно к фиг. 2.
Т^ = n(λ1δc⋅iγс-λ1γc⋅iδс) (3)
В качестве альтернативы, считается, что когда поворотный электродвигатель находится в установившемся режиме, первичный магнитный поток [λ1] и значение [Λ1] его команды совпадают. Таким образом, применительно к фиг. 1 и 2 расчетное значение Т^ может быть найдено с помощью нижеследующего выражения (4).
Т^ = n⋅Λδ*⋅iγс (4)
В качестве альтернативы, значение Λδ0(Т), которое должна принимать амплитуда Λδ*, может быть получено при фактическом осуществлении управления первичным магнитным потоком при желаемом крутящем моменте Т. Фиг. 6 представляет собой блок-схему, иллюстрирующую метод нахождения – по амплитуде Λδ*[n-1] значения [Λ1*] команды первичного магнитного потока в некоторый момент времени управления - амплитуды Λδ*[n] значения [Λ1*] команды первичного магнитного потока в следующий момент времени управления. При этом находится амплитуда Λδ*, которая минимизирует амплитуду ia, и используется тот же способ, что и так называемый «метод поиска экстремума», в котором параметр изменяется для нахождения значения локального минимума значения цели управления.
Допускается случай, в котором увеличение на величину ΔΛδ изменения от амплитуды Λδ*[n-2] значения [Λ1*] команды первичного магнитного потока в некоторый момент времени управления до амплитуды Λδ*[n-1] в следующий момент времени управления приводит к увеличению амплитуды ia на разность Δia. В этом случае изменение, начинающееся с величины Λδ0(Т), которая минимизирует амплитуду ia, осуществляется от амплитуды Λδ*[n-2] до амплитуды Λδ*[n-1]. При этом считается, что амплитуда Λδ*[n] уменьшается относительно амплитуды Λδ*[n-1] на величину ΔΛδ изменения, благодаря чему амплитуда Λδ*[n] приближается к величине Λδ0(Т).
И наоборот, допускается случай, в котором увеличение на величину ΔΛδ изменения от амплитуды Λδ*[n-2] до амплитуды Λδ*[n-1] приводит к уменьшению амплитуды ia на разность Δia. В этом случае изменение, приближающееся к величине Λδ0(Т), которая минимизирует амплитуду ia, осуществляется от амплитуды Λδ*[n-2] до амплитуды Λδ*[n-1]. При этом считается, что амплитуда Λδ*[n] увеличивается относительно амплитуды Λδ*[n-1] на величину ΔΛδ изменения, благодаря чему амплитуда Λδ*[n] приближается к величине Λδ0(Т).
Таким образом, необходима операция, при которой генератор 2 приращений имеет величину ΔΛδ изменения и разность Δia, вводимые для выдачи ΔΛδ × g(Δia), а сумматор суммирует ΔΛδ × g(Δia) с амплитудой Λδ*[n-1] для нахождения амплитуды Λδ*[n]. Однако функция g(Q) принимает значение (-1), когда величина Q является положительной, и принимает значение 1, когда величина Q является отрицательной.
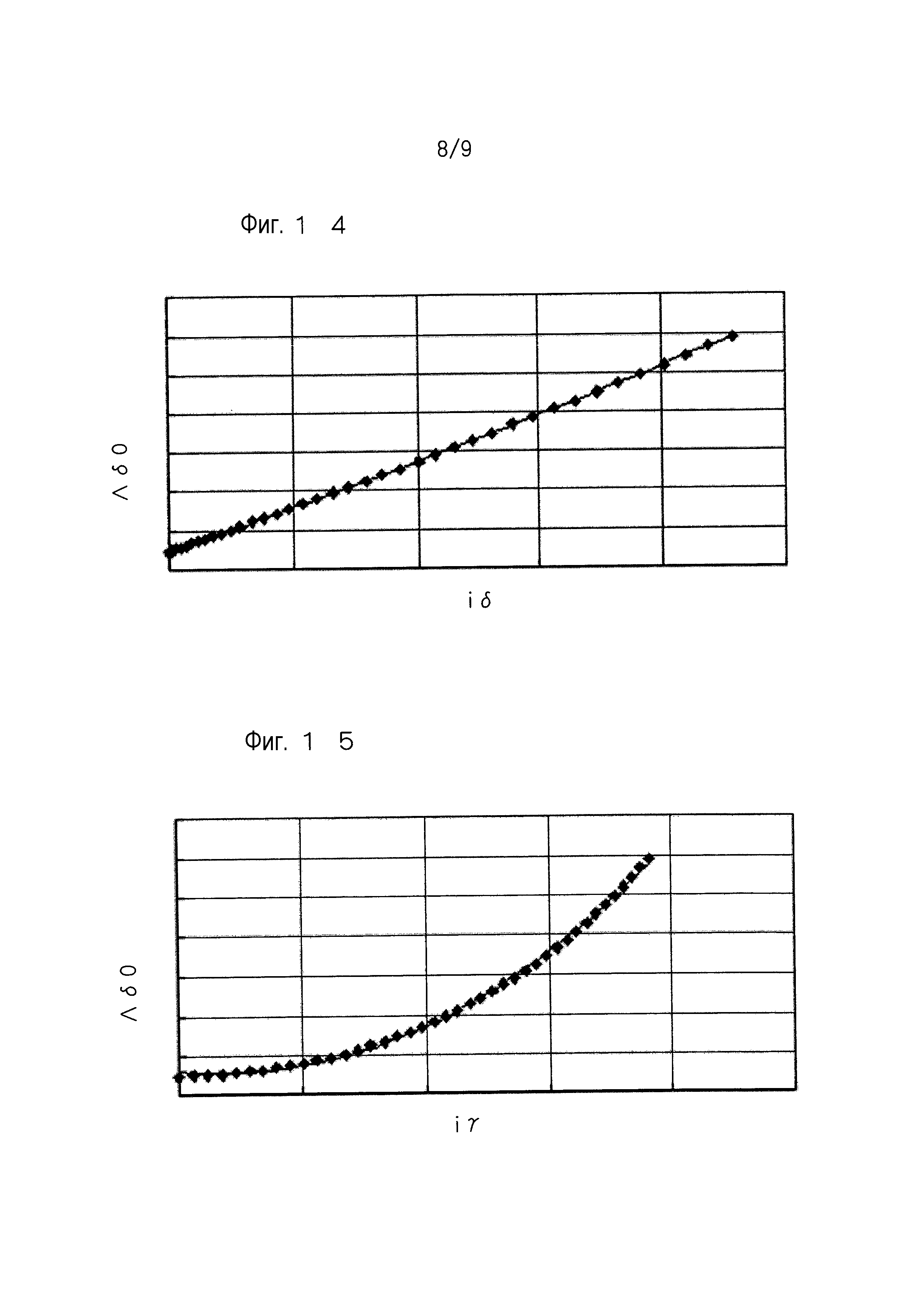
Фиг. 7-9 представляют собой графики, каждый из которых иллюстрирует соотношение между крутящим моментом Т и током якоря в рабочей точке, в которой реализуется максимальный крутящий момент/ток. Фиг. 7 представляет собой график, иллюстрирующий соотношение между крутящим моментом Т и составляющей iγ по оси γ амплитуды ia, фиг. 8 представляет собой график, иллюстрирующий соотношение между крутящим моментом Т и составляющей iδ по оси δ амплитуды ia, а фиг. 9 представляет собой график, иллюстрирующий соотношение между крутящим моментом Т и амплитудой ia. Фиг. 10 представляет собой график, иллюстрирующий соотношение между крутящим моментом Т и нагрузочным углом φ в рабочей точке, в которой реализуется максимальный крутящий момент/ток. Эти графики иллюстрируют, что крутящий момент Т однозначно определяется составляющей iγ по оси γ, составляющей iδ по оси δ, амплитудой ia и нагрузочным углом φ применительно к рабочей точке, в которой реализуется максимальный крутящий момент/ток.
Например, графики, изображенные на фиг. 7-10, могут быть найдены по выражениям (1) и (2) либо могут быть найдены экспериментальным путем.
Очевидно, что благодаря объединению составляющей iγ по оси γ и составляющей iδ по оси δ для нахождения нового показателя, зависящего от крутящего момента Т, величина Λδ0(Т), соответствующая этому показателю, может использоваться в качестве амплитуды Λδ*. Однако этот показатель должен однозначно определять крутящий момент Т. C учетом фиг. 2 амплитуду ia можно считать соответствующим показателем.
В установившемся режиме устанавливаются φ = φс, iγ = iγс и iδ = iδс. При этом вместо крутящего момента величина Λδ0(Т), соответствующая каждой из составляющей iγс по оси γс, составляющей iδс по оси δс, амплитуды ia и разности φс фаз, используется для амплитуды Λδ*, что позволяет реализовать максимальный крутящий момент/ток. В этом случае устройство, которое обнаруживает крутящий момент Т, не требуется.
Фиг. 11 представляет собой блок-схему, иллюстрирующую метод выдачи величины Λδ0(Т), соответствующей каждой из составляющей iγс по оси γс, составляющей iδс по оси δс, амплитуды ia и разности φс фаз, в качестве амплитуды Λδ*.
Блок 4 установки значения команды первичного магнитного потока содержит блок 3 оценки крутящего момента и блок 1 установки значения команды первичного магнитного потока. Блок 3 оценки крутящего момента устанавливает расчетное значение Те крутящего момента на основе составляющей iγс по оси γс, составляющей iδс по оси δс (либо дополнительно амплитуды ia) или разности φс фаз. Расчетное значение Те крутящего момента является не расчетным значением Т^, получаемым с помощью выражений (3) и (4), а расчетным значением крутящего момента Т, получаемым с помощью выражений (1) и (2), либо фиг. 7-10.
Таким образом, максимальный крутящий момент/ток может быть реализован без обнаружения крутящего момента Т.
Фиг. 12 иллюстрирует конфигурацию, в которой на предыдущей ступени блока 1 установки значения команды первичного магнитного потока предусмотрен фильтр 5. Кроме того, фиг. 13 иллюстрирует конфигурацию, в которой на предыдущей ступени блока 4 установки значения команды первичного магнитного потока предусмотрен фильтр 5. Фильтр 5 действует как фильтр нижних частот. На основе крутящего момента Т, получаемого путем обработки с помощью фильтра нижних частот, установка значения команды первичного магнитного потока сдерживает быстрое изменение значения команды первичного магнитного потока. Это может снизить влияние на само управление первичным магнитным потоком за счет установки амплитуды Λδ* в каждом крутящем моменте Т (или каждом его расчетном значении Те), либо в каждой составляющей iδс по оси δс и составляющей iγс по оси γс, либо в каждой разности φс фаз.
Блок 4 установки значения команды первичного магнитного потока, изображенный на фиг. 11, не обязательно должен содержать блок 3 оценки крутящего момента и блок 1 установки значения команды первичного магнитного потока. Это скорее желательно для экспериментального получения соотношения между составляющей iδ по оси δ и значением Λδ0 (см. фиг. 14) и соотношения между составляющей iγ по оси γ и значением Λδ0 (см. фиг. 15) и для сохранения их путем представления в виде формулы или в виде таблицы (или карты). Это вызвано тем, что расчетное значение Те крутящего момента не обязательно должно находиться однократно.
Второй вариант осуществления
Значение Λδ0(Т) может являться первичным магнитным потоком [λ1], который обеспечивает минимальную электрическую мощность/крутящий момент, вместо амплитуды первичного магнитного потока [λ1], который обеспечивает максимальный крутящий момент/ток. В этом случае точно так же, поскольку определяется амплитуда Λδ*, принимающая значение Λδ0(Т), и осуществляется управление первичным магнитным потоком, фаза β тока для получения максимальной эффективности регулируется надлежащим образом без необходимости повторного выполнения вычисления, такого как управление вектором тока.
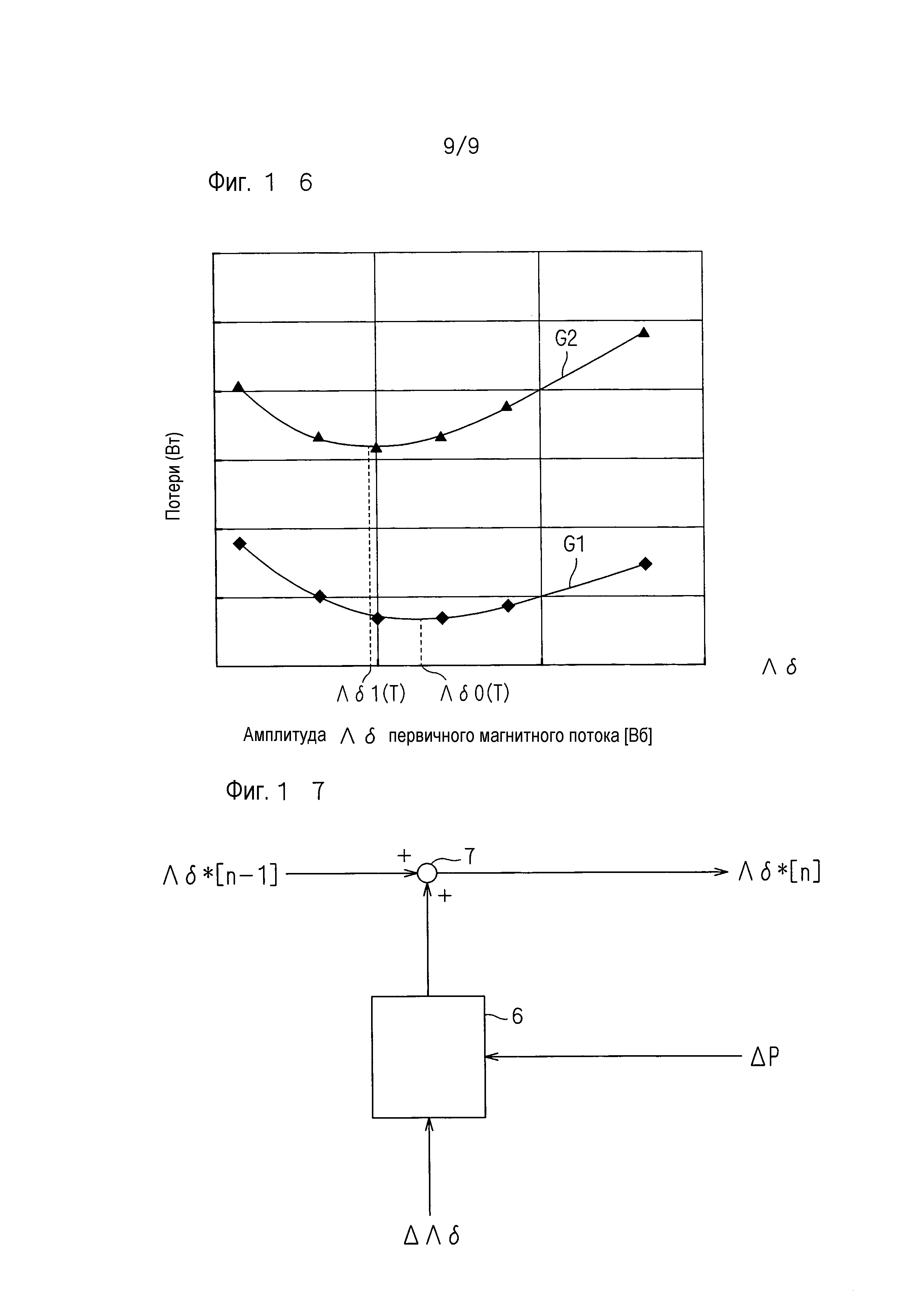
То есть, на основе соотношений между первичным магнитным потоком [λ1], потерями поворотного электродвигателя, крутящим моментом Т и скоростью вращения поворотного электродвигателя первичный магнитный поток, который минимизирует потери, устанавливается в качестве значения команды первичного магнитного потока в соответствии с крутящим моментом Т и скоростью вращения для выполнения управления первичным магнитным потоком, которое может реализовывать управление максимальной эффективностью.
Фиг. 16 представляет собой график, иллюстрирующий потери относительно амплитуды Λδ первичного магнитного потока [λ1], когда крутящий момент Т и скорость вращения поворотного электродвигателя постоянны. Кривыми G1, G2 показаны потери в меди и сумма потерь в меди и потерь в железе поворотного электродвигателя соответственно. Поскольку потери в меди пропорциональны квадрату тока, протекающего в поворотном электродвигателе, первичный магнитный поток, который обеспечивает минимальное значение кривой G1, может использоваться в качестве значения Λδ0(Т) в первом варианте осуществления.
В настоящем варианте осуществления амплитуда первичного магнитного потока [λ1], который обеспечивает минимальное значение кривой G2, находится как величина Λδ1(Т), и она используется в качестве амплитуды Λδ* значения [Λ1*] команды первичного магнитного потока.
Вышеописанная величина Λδ1(Т) может быть найдена способом, аналогичным так называемому «методу поиска экстремума», как в описании применительно к фиг. 6.
В частности, что касается фиг. 17, по амплитуде Λδ*[n-1] в некоторый момент времени управления находится амплитуда Λδ*[n] в следующий момент времени управления. При этом находится амплитуда Λδ*, которая минимизирует электрическую мощность.
Допускается случай, в котором увеличение на величину ΔΛδ изменения от амплитуды Λδ*[n-2] в некоторый момент времени управления до амплитуды Λδ*[n-1] в следующий момент времени управления приводит к увеличению электрической мощности на разность ΔР.
Генератор 6 приращений имеет величину ΔΛδ изменения и разность ΔР, вводимые для выдачи ΔΛδ × g(ΔР), а сумматор 7 суммирует ΔΛδ × g(ΔР) с амплитудой Λδ*[n-1] для нахождения амплитуды Λδ*[n]. Функция g описана выше.
Во втором варианте осуществления, так же, как и в первом варианте осуществления, фильтр может использоваться для исключения составляющих вблизи управляющей частоты управления первичным магнитным потоком крутящего момента Т (или его расчетного значения Те) и для установки амплитуды Λδ*.
Кроме того, путем экспериментального предварительного нахождения величины Λδ1(Т) первичного магнитного потока, которая минимизирует потери в соответствии со скоростью вращения, или величины первичного магнитного потока, которая минимизирует потери в соответствии со скоростью вращения и крутящим моментом Т, может быть создана таблица (или карта) этих значений. В соответствии со скоростью вращения и крутящим моментом Т путем считывания из таблицы величины первичного магнитного потока, которая минимизирует потери, считанная величина может быть установлена в качестве значения команды первичного магнитного потока.
Кроме того, скорость вращения может являться величиной электрического угла или величиной механического угла. Поскольку в установившемся режиме скорости осей управления (оси δс и оси γс) и управление скоростью (электрического угла) совпадают со скоростью вращения, они могут заменяться скоростью вращения.
В качестве альтернативы, в первом варианте осуществления и втором варианте осуществления вместо использования фильтра период обновления амплитуды Λδ* может задерживаться относительно периода управления первичным магнитным потоком. Это может подавлять помехи между установкой значения [Λ1*] команды первичного магнитного потока и управлением первичным магнитным потоком.
В качестве альтернативы, амплитуда Λδ* обновляется только в тех случаях, когда пульсация скорости падает в заданном диапазоне без обновления в другой момент времени, благодаря чему управление первичным магнитным потоком может осуществляться устойчиво.
Иными словами, с точки зрения сложности ухудшения устойчивости управления первичным магнитным потоком, даже если значение [Λ1*] команды первичного магнитного потока изменяется, желательно, чтобы значение [Λ1*] команды первичного магнитного потока не изменялось в периоде установления управления первичным магнитным потоком на основе значения [Λ1*] команды первичного магнитного потока, а обновлялось в состоянии, когда управление первичным магнитным потоком на основе значения [Λ1*] команды первичного магнитного потока, а обновлялось в состоянии, когда управление первичным магнитным потоком является устойчивым.
Несмотря на то, что настоящее изобретение подробно описано, приведенное выше описание является иллюстративным и не ограничивает настоящее изобретение во всех аспектах. Следует понимать, что в пределах объема настоящего изобретения может допускаться множество изменений, не приведенных в качестве примера.
Устройство для детектирования углового положения и воздушный кондиционер
Холодильное устройство для контейнера
Холодильное устройство контейнера
Компрессор
Способ получения 1,1-дибром-1-фторэтана
Способ производства фтороводорода
Способ очистки производного акриловой кислоты
Компрессор и способ его изготовления (варианты)
Способ изготовления компрессора и компрессор
Схема защиты от перенапряжений и система источника питания
Спиральный компрессор
Устройство для детектирования углового положения и воздушный кондиционер
Холодильное устройство для контейнера
Холодильное устройство контейнера
Компрессор

