Результат интеллектуальной деятельности: УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ, СПОСОБ ОБРАБОТКИ СИГНАЛОВ И УСТРОЙСТВО СЧИТЫВАНИЯ ИНФОРМАЦИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству считывания информации, имеющему датчик. Более конкретно, изобретение относится к устройству считывания информации, подходящему для считывания информации структуры, такой как изображение, напечатанное магнитными чернилами на бумажных денежных знаках или других подобных бумажных банкнотах, с использованием линейного датчика, в котором множество элементов распознавания расположено в линию.
Уровень техники
В качестве одного устройства считывания информации такого типа существует магнитное устройство распознавания, имеющее линейный датчик с множеством магнитных датчиков, значения сопротивления которых изменяются при приложении магнитного поля, и которые расположены в линию. Магнитное устройство распознавания используется, например, в устройстве идентификации бумажных денежных знаков, которое идентифицирует бумажные денежные знаки. Посредством магнитных датчиков устройство идентификации бумажных денежных знаков распознает изображение, напечатанное магнитными чернилами на бумажных денежных знаках, подлежащих идентификации. Устройство идентификации бумажных денежных знаков также осуществляет определение подлинности, номинала и т.п. для бумажных денежных знаков на основании подобия между распознанным напечатанным изображением и сохраненным эталонным изображением.
Поскольку магнитное поле, формируемое магнитными чернилами, используемыми для печати изображения на бумажных денежных знаках или тому подобном, является довольно слабым, сигнал распознавания, получаемый магнитным устройством распознавания, является довольно слабым. Кроме того, в магнитном устройстве распознавания к сигналу распознавания добавляется компонент постоянного тока (компонент смещения). Соответственно, сигнал распознавания должен быть усилен и компонент смещения должен быть устранен. Однако компонент смещения изменяется вместе с изменениями в среде, такими как изменения в окружающей температуре, и с изменениями, связанными с износом и тому подобным, в магнитных датчиках. Таким образом, отделить компонент смещения в сигнале распознавания не просто.
Методика коррекции неоднородности в уровне сигнала распознавания, обусловленной температурой магнитных элементов распознавания и тому подобным, раскрыта в устройстве распознавания магнитной структуры, описанном в патентном источнике 1. Устройство распознавания магнитной структуры по патентному источнику 1 выполняет коррекцию смещения в течение каждого интервала между проведением одного экземпляра бумажного денежного знака через магнитное устройство распознавания и проведением следующего экземпляра магнитного денежного знака через магнитное устройство распознавания.
Источники из уровня техники
Патентные источники
Патентный источник 1: Публикация заявки на патент Японии №2012-128683 (абзацы 0049-0062, Фиг. 4-6)
Раскрытие изобретения
Проблема, решаемая изобретением
Способ коррекции смещения по патентному источнику 1, однако, вычисляет значение коррекции смещения в интервале между одним экземпляром денежного знака и следующим экземпляром. На протяжении интервала, в котором он считывает экземпляр бумажного денежного знака, способ коррекции смещения по патентному источнику 1 применяет одно и то же значение коррекции. В результате существует проблема, состоящая в том, что когда уровень сигнала распознавания изменяется во время интервала, в котором считывается экземпляр бумажного денежного знака, неоднородность уровня сигнала распознавания не может быть достаточным образом скорректирована.
Аналогичная проблема существовала в устройстве, которое считывает информацию из структур изображений, отличных от магнитных структур.
Настоящее изобретение решает данную проблему, снижая воздействие изменений в сигнале распознавания, которые происходят во время периода считывания каждого распознаваемого объекта. Путем быстрой коррекции неоднородности в уровне сигнала распознавания изобретение может точно считывать информацию структуры.
Средство для решения проблемы
Устройство обработки сигнала согласно настоящему изобретению содержит:
блок формирования значения оценки наличия/отсутствия структуры для вычисления на основании данных распознавания, которые включают в себя компонент сигнала распознаваемого объекта, и которые получают путем последовательного распознавания посредством элемента распознавания, для сканируемого объекта, степени включения компонента сигнала в данных распознавания;
блок обновления данных коррекции для получения взвешенной суммы данных коррекции, представляющих компонент постоянного тока элемента распознавания, и данных распознавания для формирования обновленных данных коррекции, причем вес, присваиваемый данным коррекции, увеличивается по мере увеличения упомянутой степени, и вес, присваиваемый данным распознавания, увеличивается по мере уменьшения упомянутой степени; и
блок вычитания данных коррекции для вычитания обновленных данных коррекции из данных распознавания для формирования скорректированных данных распознавания.
Эффект изобретения
Изобретение может уменьшить воздействие изменений в уровне сигнала распознавания, которые происходят во время периода считывания каждого распознаваемого предмета.
Краткое описание чертежей
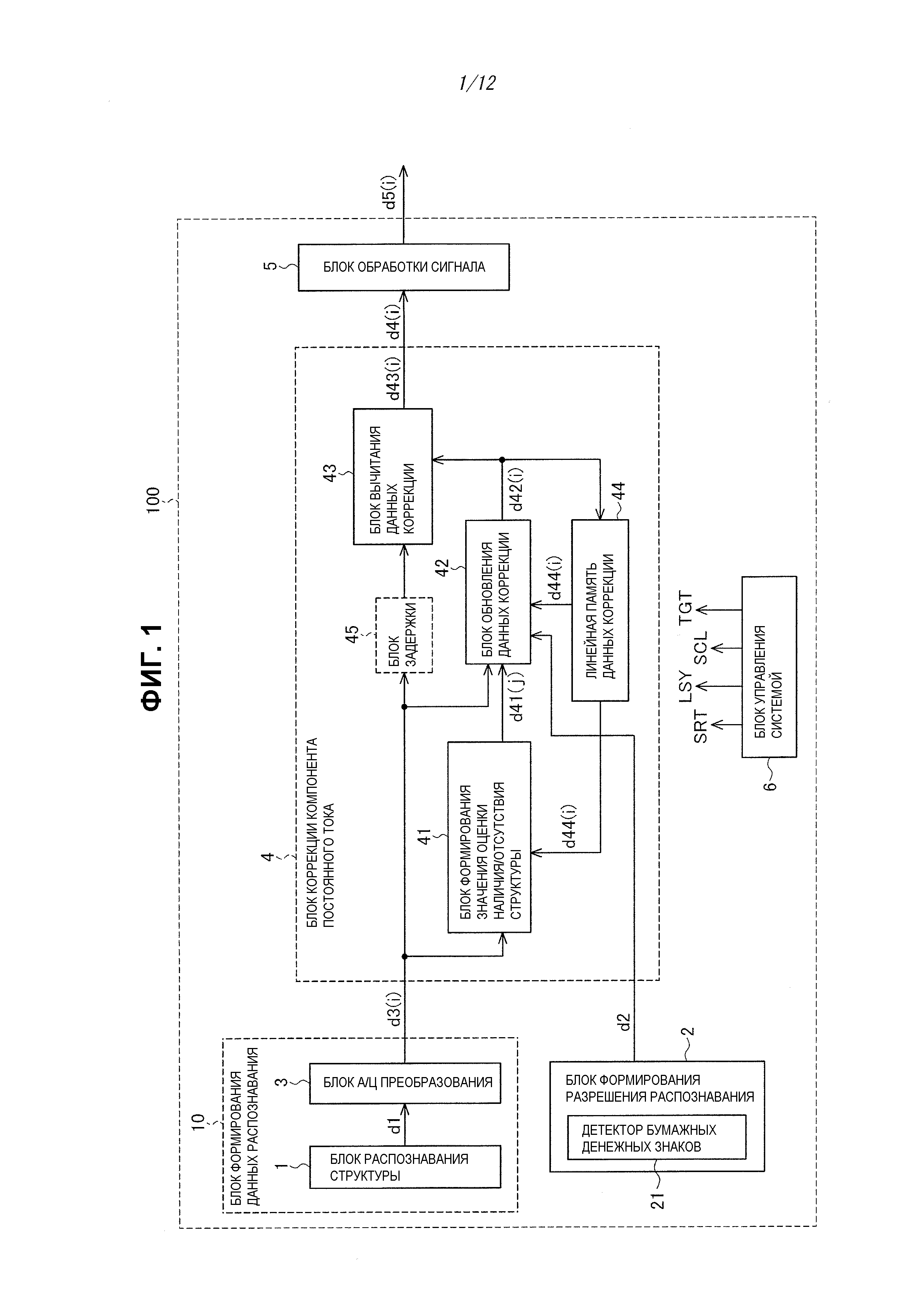
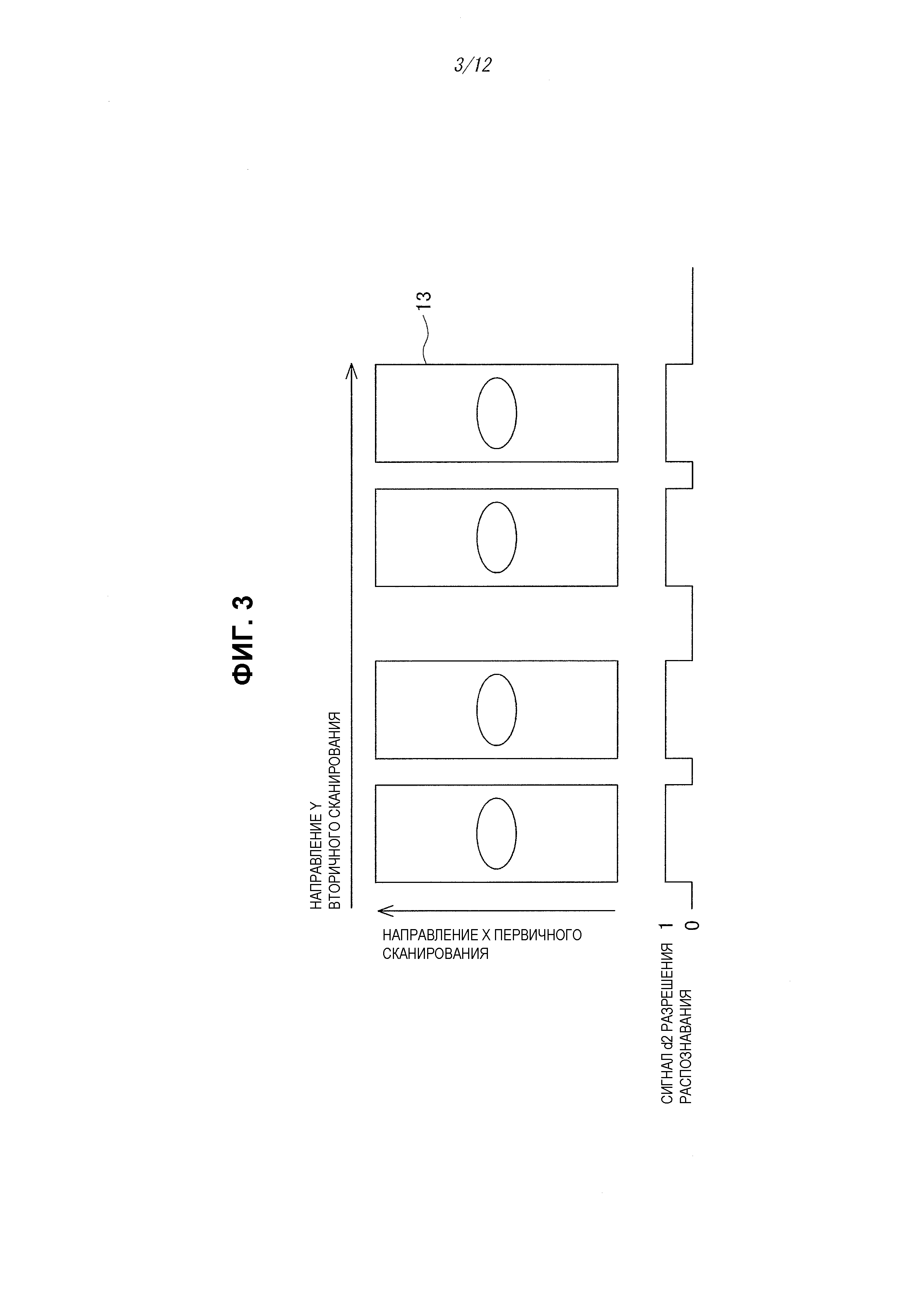
Фиг. 1 - блок-схема, иллюстрирующая устройство считывания информации в первом варианте выполнения изобретения.
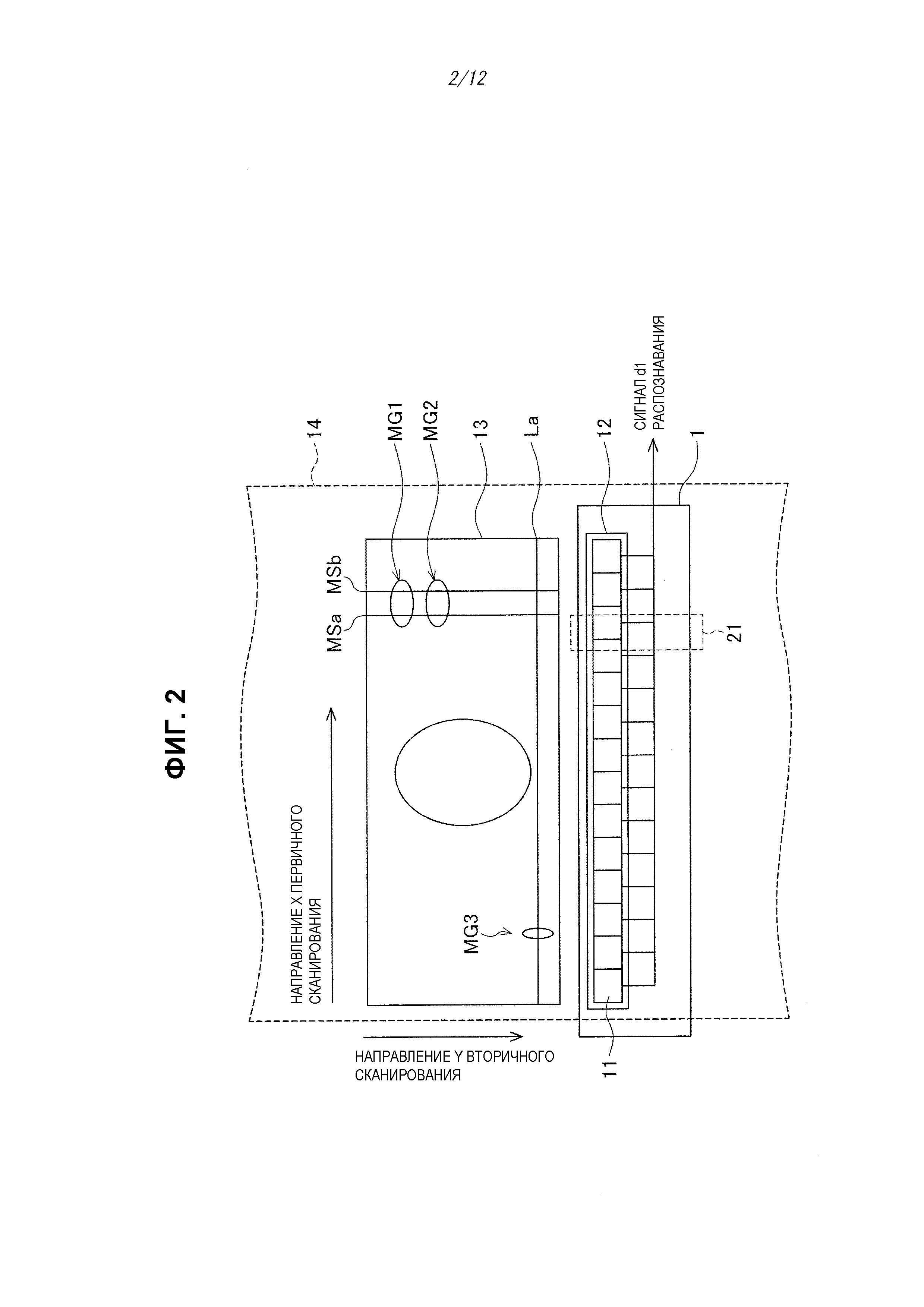
Фиг. 2 схематично иллюстрирует структуру и работу блока 1 распознавания структуры по Фиг. 1.
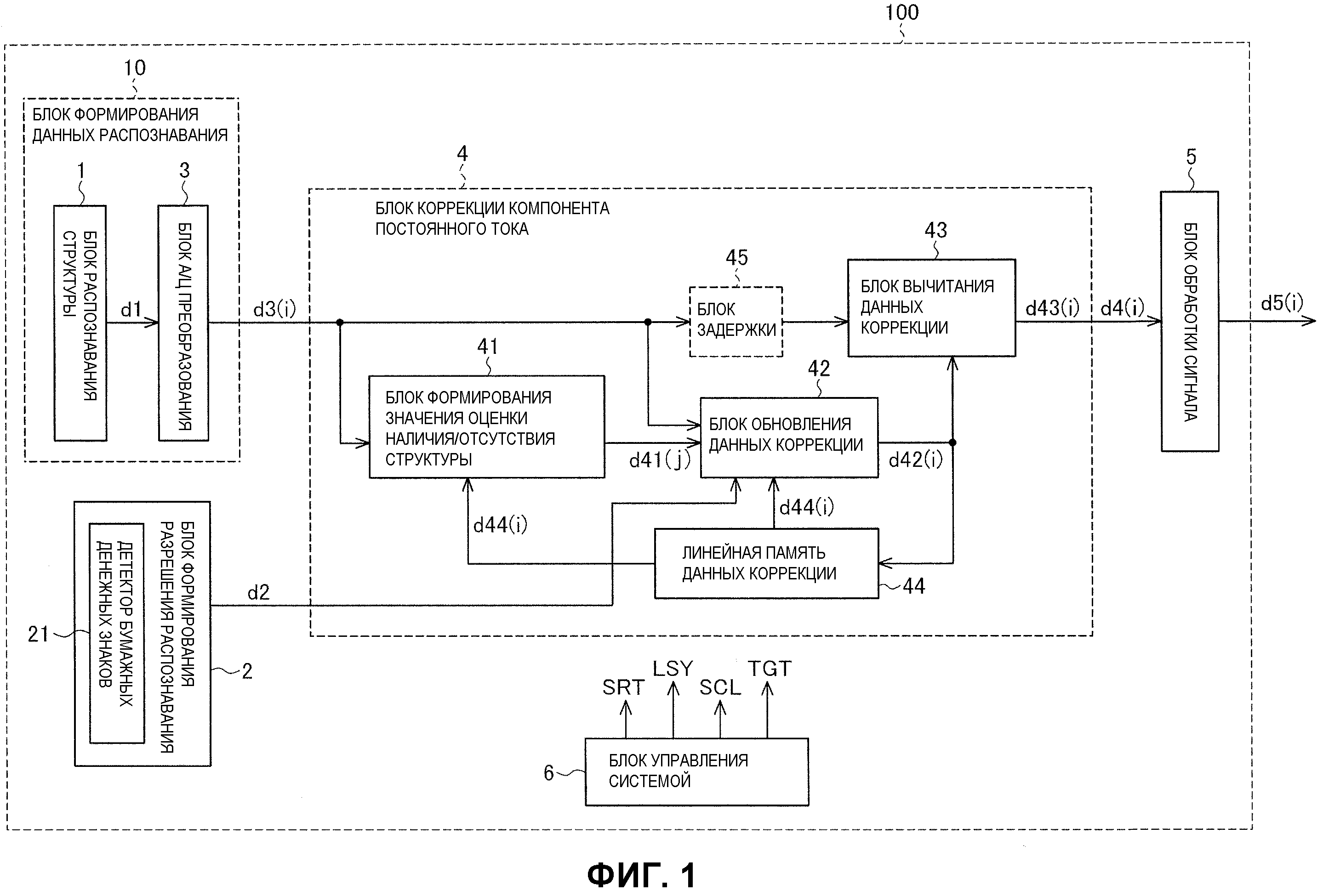
Фиг. 3 иллюстрирует работу блока 2 формирования разрешения распознавания по Фиг. 1.
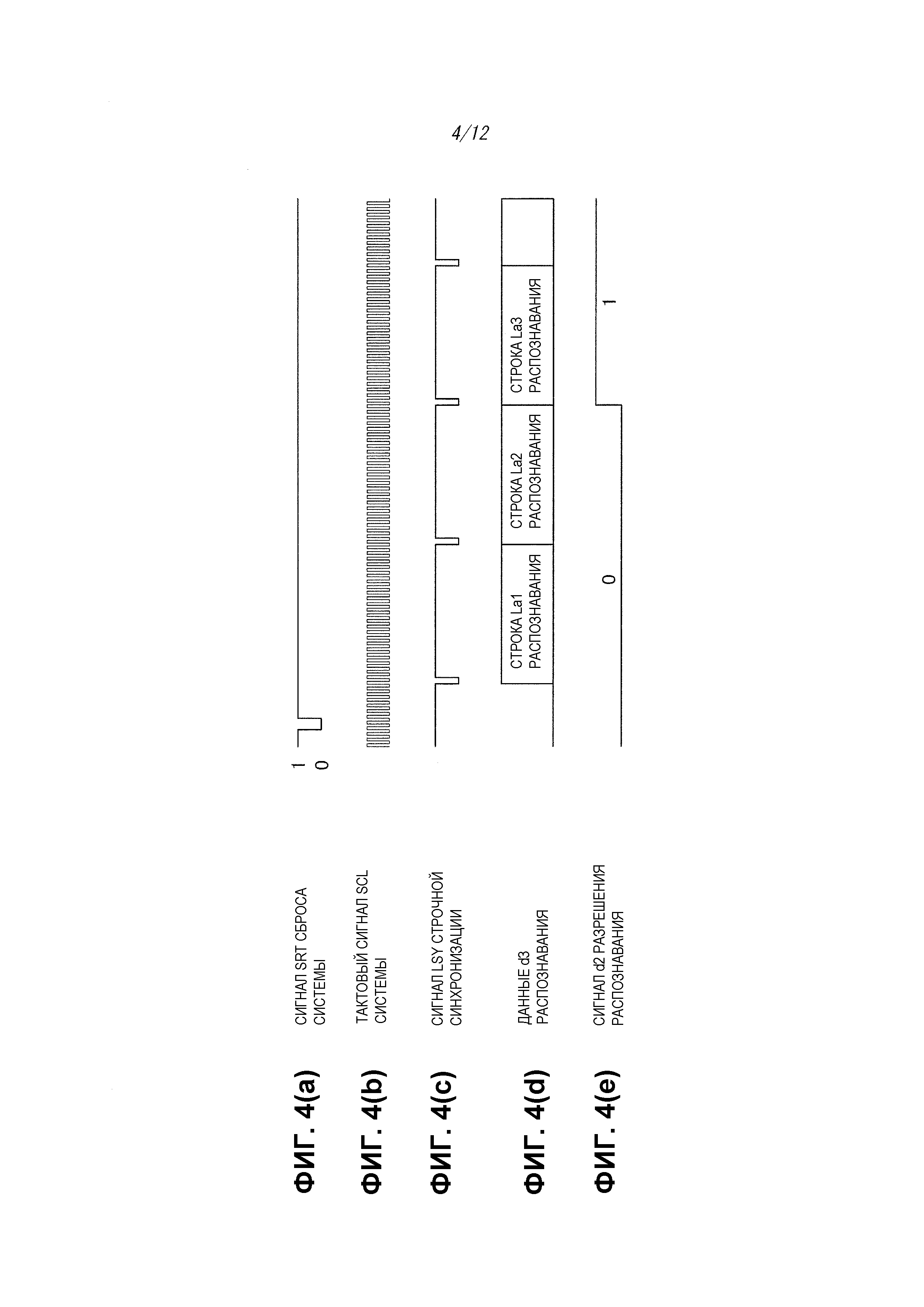
Фиг. 4(a)-4(e) - схемы синхронизации, иллюстрирующие сигналы, выдаваемые блоком 3 аналого-цифрового (А/Ц) преобразования по Фиг. 1.
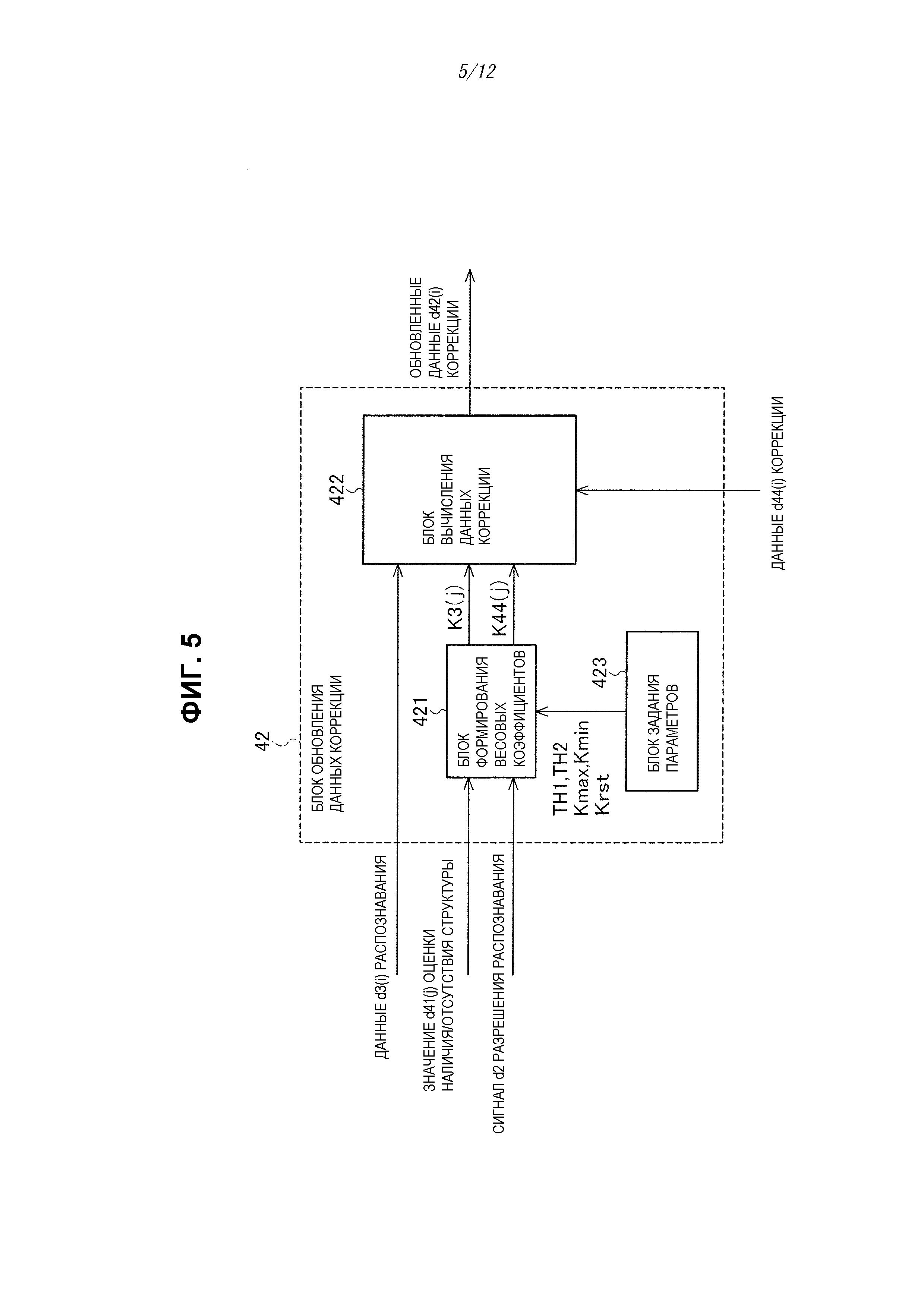
Фиг. 5 - блок-схема, демонстрирующая пример структуры блока 42 обновления данных коррекции по Фиг. 1.
Фиг. 6 иллюстрирует отношение между входными и выходными данными блока 421 формирования весовых коэффициентов по Фиг. 5.
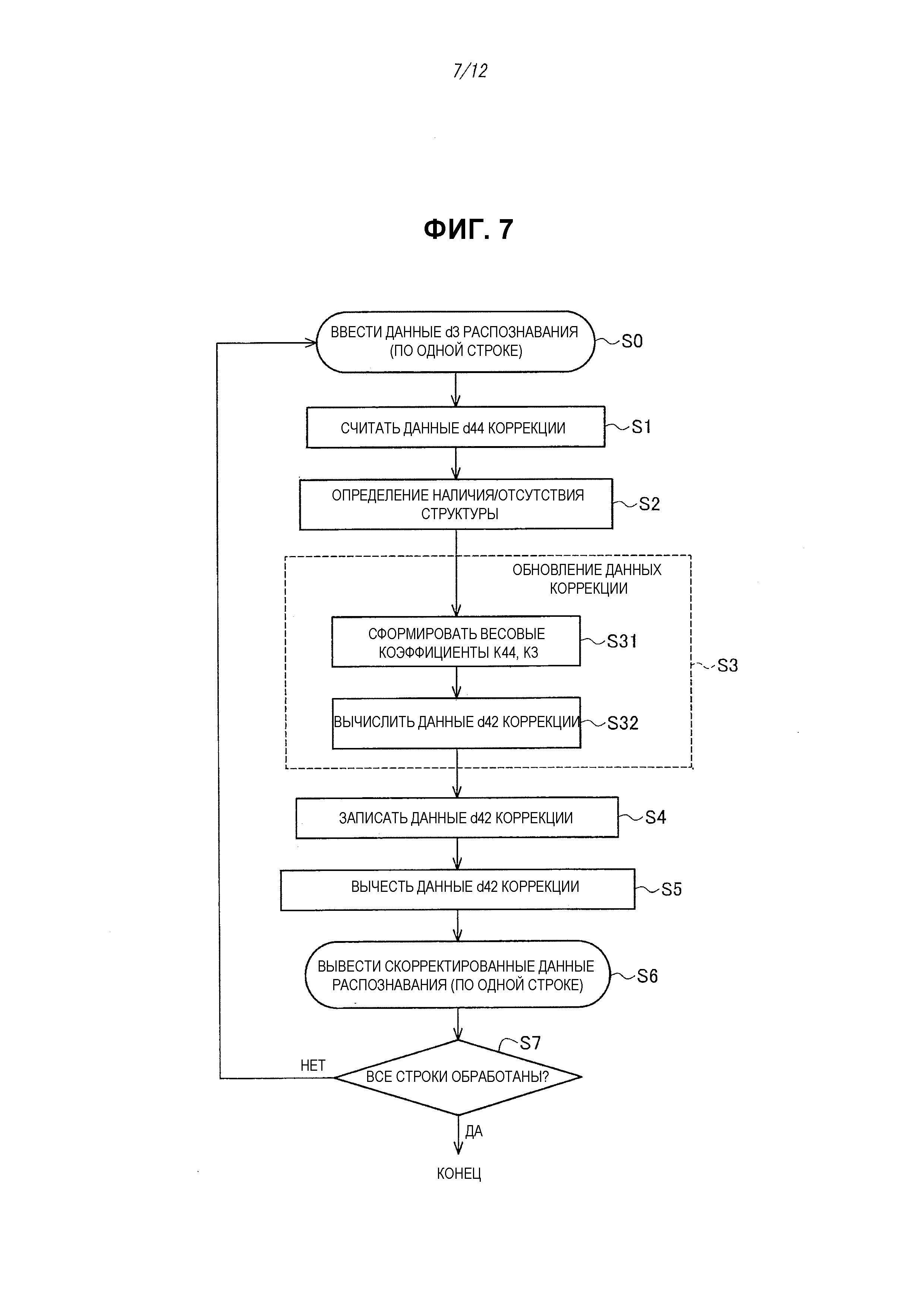
Фиг. 7 - блок-схема, иллюстрирующая работу блока 4 коррекции компонента постоянного тока по Фиг. 1.
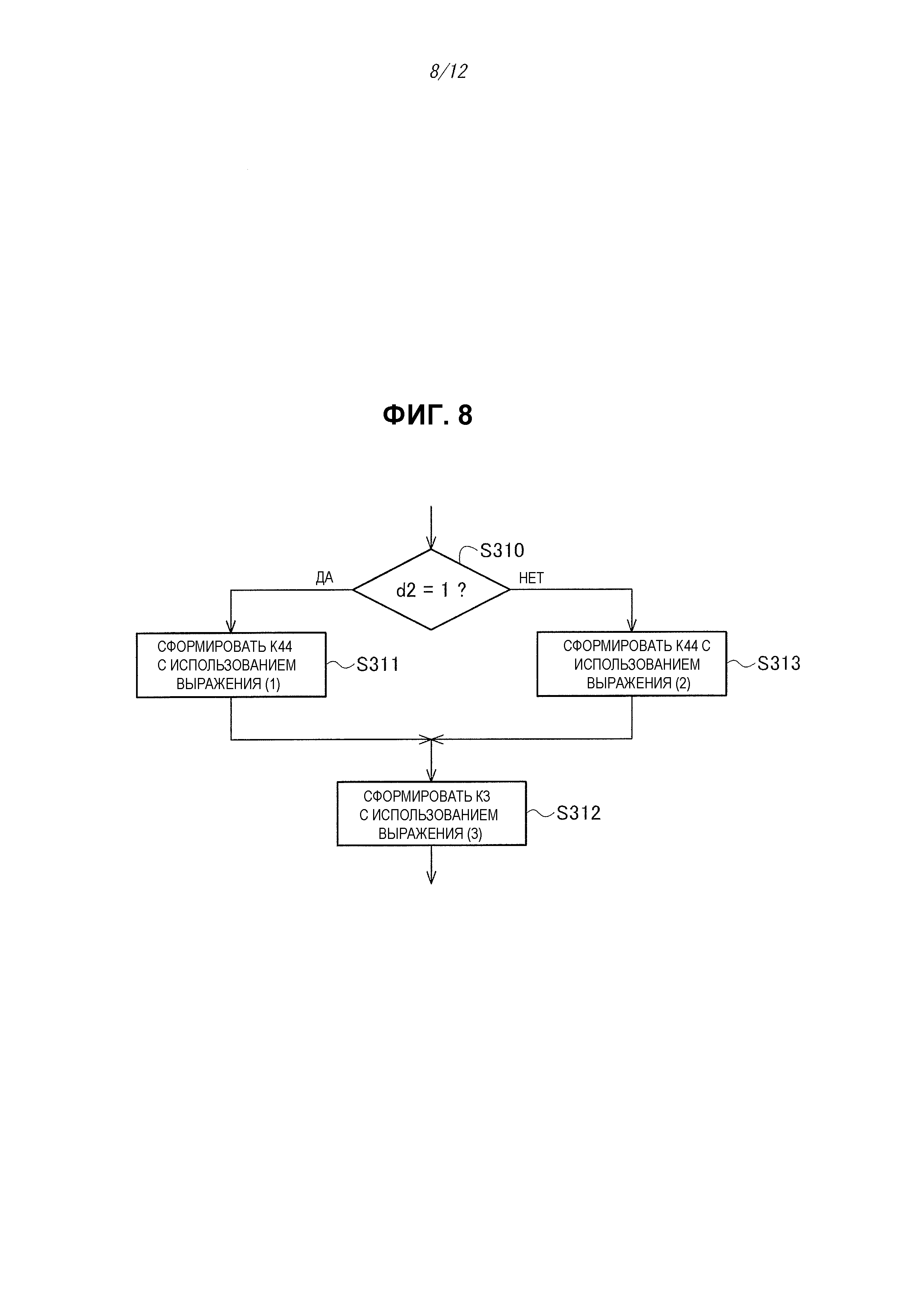
Фиг. 8 - блок-схема, иллюстрирующая подробности этапа S31 формирования весовых коэффициентов по Фиг. 7.
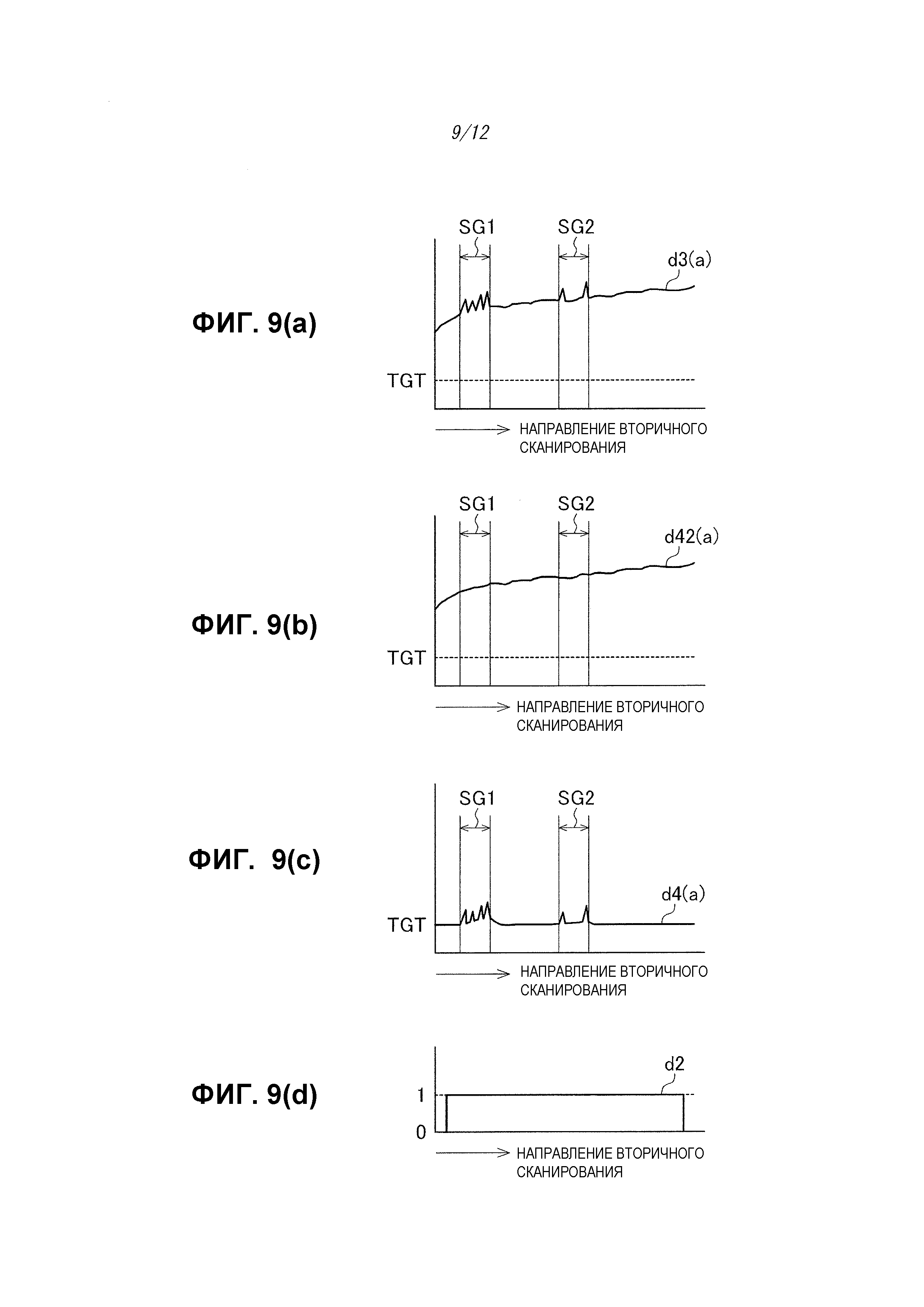
Фиг. 9(a)-9(d) демонстрируют примеры изменений в направлении вторичного сканирования в сигналах отдельных блоков блока 4 коррекции компонента постоянного тока по Фиг. 1.
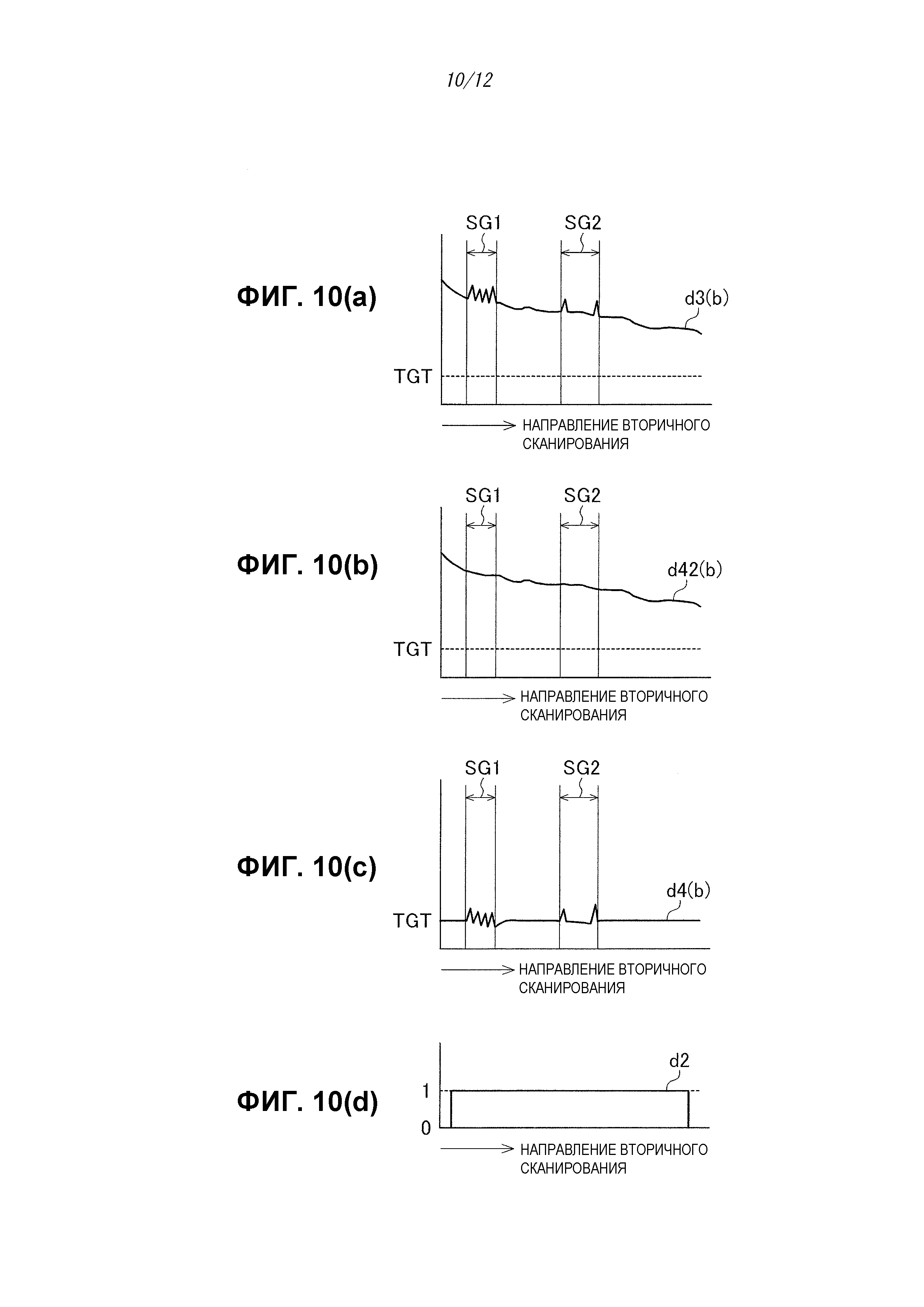
Фиг. 10(a)-10(d) демонстрируют другие примеры изменений в направлении вторичного сканирования в сигналах отдельных блоков блока 4 коррекции компонента постоянного тока по Фиг. 1.
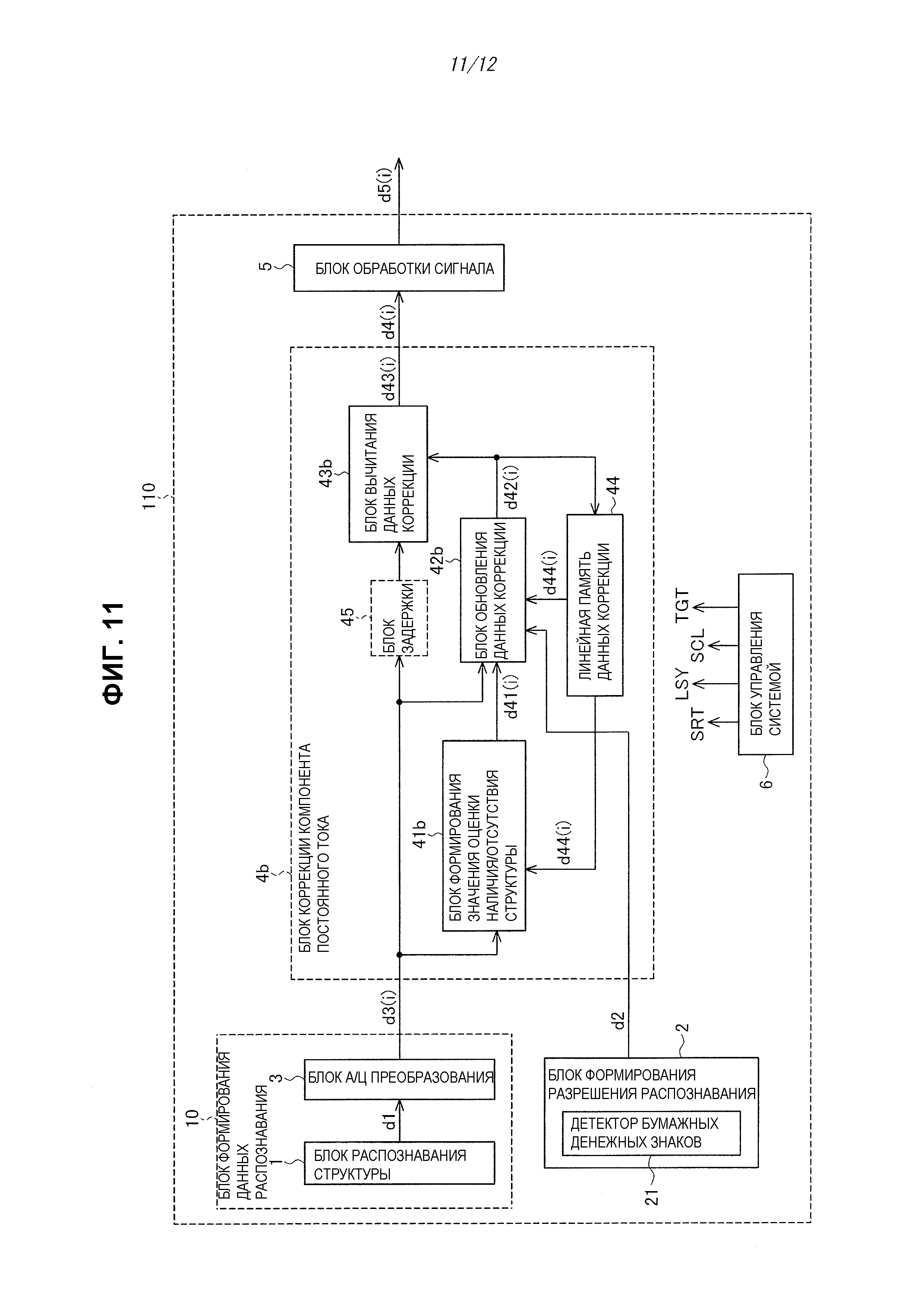
Фиг. 11 - блок-схема, иллюстрирующая устройство считывания информации в третьем варианте выполнения изобретения.
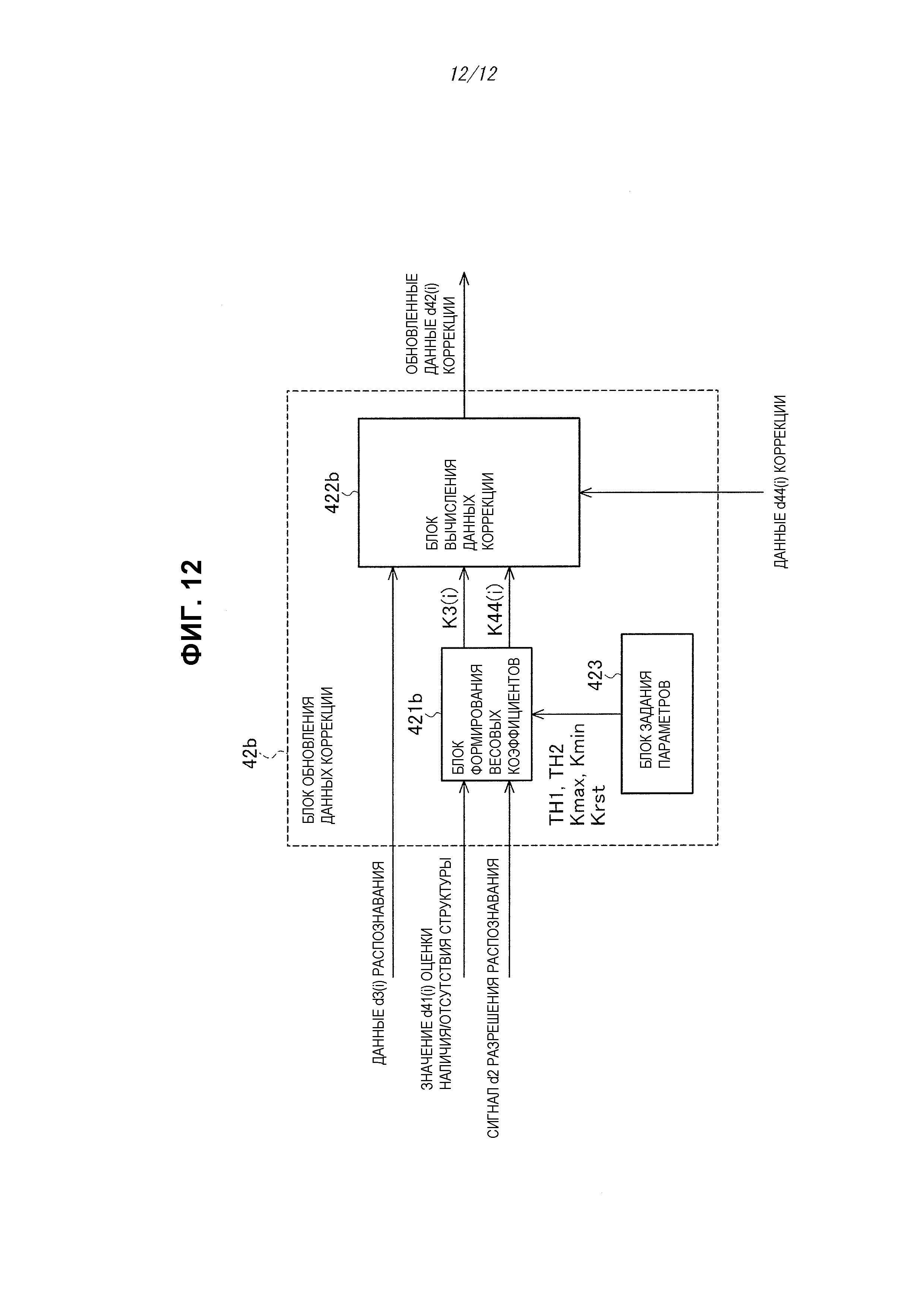
Фиг. 12 - блок-схема, демонстрирующая пример структуры блока 42b обновления данных коррекции по Фиг. 11.
Осуществление изобретения
Первый вариант выполнения
На Фиг. 1 показана структура устройства 100 считывания информации согласно первому варианту выполнения изобретения. Устройство 100 считывания информации имеет блок 1 распознавания структуры, блок 2 формирования разрешения распознавания, блок 3 аналого-цифрового (А/Ц) преобразования, блок 4 коррекции компонента постоянного тока, блок 5 обработки сигнала и блок 6 управления системой. Блок 4 коррекции компонента постоянного тока имеет блок 41 формирования значения оценки наличия/отсутствия структуры, блок 42 обновления данных коррекции, блок 43 вычитания данных коррекции и линейная память 44 данных коррекции. Блок 4 коррекции компонента постоянного тока также может иметь блок 45 задержки. Блок 4 коррекции компонента постоянного тока представляет собой устройство обработки сигнала.
Блок 1 распознавания структуры распознает структуру изображения в распознаваемом объекте (в считываемом объекте). Блок 1 распознавания структуры выдает сигнал d1 распознавания в аналоговой форме.
Блок 2 формирования разрешения распознавания выдает сигнал d2 разрешения распознавания. Сигнал d2 разрешения распознавания различает интервалы, в которых выполняется и не выполняется распознавание структуры изображения. Например, он указывает, находится ли объект в области распознавания. ‘Область распознавания’ представляет собой область, в которой считывается информация структуры.
Блок 3 А/Ц преобразования принимает на входе сигнал d1 распознавания. Блок 3 А/Ц преобразования преобразует сигнал d1 распознавания в данные d3 распознавания в цифровой форме.
Блок 10 формирования данных распознавания включает в себя блок 1 распознавания структуры и блок 3 А/Ц преобразования. Блок 10 формирования данных распознавания распознает структуру изображения. Блок 10 формирования данных распознавания выдает данные d3 распознавания, представляющие результат распознавания.
Блок 4 коррекции компонента постоянного тока принимает на входе данные d3 распознавания и сигнал d2 разрешения распознавания. Блок 4 коррекции компонента постоянного тока выдает скорректированные данные d4 распознавания, в которых компонент постоянного тока в направлении Y вторичного сканирования устранен из данных d3 распознавания. Направление движения (направление транспортировки) бумажного денежного знака 13 по отношению к блоку 1 распознавания структуры называется направлением вторичного сканирования.
Блок 5 обработки сигнала принимает на входе скорректированные данные d4 распознавания. Блок 5 обработки сигнала выполняет обработку сигнала для скорректированных данных d4 распознавания. Блок 5 обработки сигнала выдает обработанные данные d5 распознавания.
Ниже будет приведено более подробное описание, в котором в качестве примера рассмотрен случай, при котором считываемый объект представляет собой бумажный денежный знак, а устройство считывания информации является магнитным устройством распознавания, которое распознает магнитную структуру в изображении, напечатанном магнитными чернилами на бумажном денежном знаке.
Блок 6 управления системой выдает сигнал SRT сброса системы, сигнал LSY строчной синхронизации, тактовый сигнал SCL системы, и данные, указывающие на целевое значение TGT.
Сигнал LSY строчной синхронизации - это сигнал, который выравнивает хронирование в циклах из одной строки. Сигнал LSY строчной синхронизации формируется однократно за цикл строки. Сигнал LSY строчной синхронизации является сигналом синхронизации с отрицательной полярностью.
Сигнал SRT сброса системы представляет собой сигнал для приведения устройства 100 считывания информации в исходное состояние.
Целевое значение TGT является значением компонента постоянного тока сигнала, который подвергается коррекции компонента постоянного тока в блоке 4 коррекции компонента постоянного тока.
Тактовый сигнал SCL системы представляет собой сигнал, который выравнивает хронирование работы множества схем путем циклического перехода в состояние высокого напряжения и в состояние низкого напряжения.
Сигнал LSY строчной синхронизации и тактовый сигнал SCL системы подаются в блок 1 распознавания структуры, блок 3 А/Ц преобразования, блок 4 коррекции компонента постоянного тока и в блок 5 обработки сигнала (линии передачи сигналов, по которым они подаются, не показаны на чертежах). Сигнал LSY строчной синхронизации и тактовый сигнал SCL системы используются для синхронизации обработки в блоке 1 распознавания структуры, блоке 3 А/Ц преобразования, блоке 4 коррекции компонента постоянного тока и в блоке 5 обработки сигнала.
Фиг. 2 схематично иллюстрирует структуру и работу блока 1 распознавания структуры. Как показано на Фиг. 2, блок 1 распознавания структуры имеет линейный датчик 12. Линейный датчик 12 имеет множество магнитных датчиков (элементов распознавания) 11, которые расположены в линию, и значение сопротивления которых изменяется при приложении магнитного поля. Линейный датчик 12 распознает магнитную структуру, сформированную на бумажном денежном знаке 13. Линейный датчик 12 выдает сигнал d1 распознавания.
Множество элементов 11 распознавания линейного датчика 12 распознает магнитную структуру по порядку своего расположения. Последовательный вывод сигнала d1 распознавания элементами 11 распознавания называется первичным сканированием. Из нижней части каждого элемента 11 распознавания по Фиг. 2 продолжается проводник. Сигнал d1 распознавания выводится по этим проводникам. Направление длины линейного датчика 12 называется направлением первичного сканирования. Направление длины является направлением слева направо по Фиг. 2. Бумажный денежный знак 13 имеет области MG1, MG2 и MG3 с магнитными структурами. Область MG3 расположена на строке La распознавания в направлении X первичного сканирования по Фиг. 2.
Бумажный денежный знак 13 транспортируется посредством транспортерной ленты 14 или тому подобного. Бумажный денежный знак 13 проходит через область распознавания. Область распознавания представляет собой область, в которой магнитная структура распознается блоком 1 распознавания структуры. Транспортерная лента 14 схематично показана пунктирными линиями на Фиг. 2. Бумажный денежный знак 13 ориентирован таким образом, что направление его короткой стороны находится в направлении Y вторичного сканирования, а направление его длинной стороны находится в направлении X вторичного сканирования. Направление перемещения (направление транспортировки) бумажного денежного знака 13 по отношению к блоку 1 распознавания структуры называется направлением вторичного сканирования. В данном случае направление транспортировки бумажного денежного знака 13 является направлением Y вторичного сканирования. В зависимости от конфигурации устройства блок 1 распознавания структуры может перемещаться по отношению к бумажному денежному знаку 13.
Первичное сканирование выполняется, принимая каждый элемент 11 распознавания за единицу. Вторичное сканирование выполняется, принимая каждую строку La распознавания за единицу. ‘Строка распознавания’ - это подобная строке область, которая считывается за одно первичное сканирование. Область распознавания является расстоянием, в пределах которого распознается магнитная структура по мере того, как строка распознавания перемещается в направлении вторичного сканирования.
Блок 10 формирования данных распознавания сканирует бумажный денежный знак 13 в направлении X первичного сканирования посредством линейного датчика 12, в то время как бумажный денежный знак 13 перемещается в направлении транспортировки по отношению к линейному датчику 12. В результате блок 10 формирования данных распознавания может получать данные, представляющие двумерное изображение бумажного денежного знака 13. В данном случае данные, представляющие двумерное изображение, являются данными d3 распознавания.
Бумажный денежный знак 13 имеет области MG1 и MG2 с магнитными структурами. Области MG1 и MG2 расположены на линиях MSa и MSb, проходящих в направлении Y вторичного сканирования.
Распознавание магнитной структуры на бумажном денежном знаке 13 посредством блока 1 распознавания структуры выполняется в синхронизации с сигналом LSY строчной синхронизации, выдаваемым блоком 6 управления системой. То есть распознавание одной строки La распознавания выполняется каждый раз, когда поступает сигнал LSY строчной синхронизации. Распознавание одной строки La распознавания состоит в распознавании всеми элементами 11 распознавания в линейном датчике 12. Вместе с распознаванием одной строки La распознавания бумажный денежный знак 13 транспортируется на одну строку La распознавания в направлении Y вторичного сканирования.
Сигналы распознавания для множества строк La сканирования последовательно выдаются путем повторений данного процесса.
Когда размер бумажного денежного знака 13 в направлении X первичного сканирования меньше, чем размер в длину линейного датчика 12, распознавание магнитной структуры может выполняться только элементами 11 распознавания, расположенными в пределах протяженности размера бумажного денежного знака 13 в направлении X первичного сканирования. Распознавание магнитной структуры представляет собой считывание магнитной структуры. В данном случае первичное сканирование одной строки La распознавания, завершается распознаванием всеми элементами 11 распознавания, которые расположены в пределах протяженности ширины бумажного денежного знака 13.
Как показано на Фиг. 1 и 2, блок 2 формирования разрешения распознавания имеет детектор 21 бумажных денежных знаков. На основании выходного сигнала детектора 21 бумажных денежных знаков блок 2 формирования разрешения распознавания формирует сигнал d2 разрешения распознавания, как показано на Фиг. 3. Блок 2 формирования разрешения распознавания выдает сигнал d2 разрешения распознавания.
Фиг. 3 иллюстрирует работу блока 2 формирования разрешения распознавания. Для облегчения понимания отношения между бумажным денежным знаком 13 и сигналом d2 разрешения распознавания на Фиг. 3 как бумажный денежный знак 13, так и сигнал d2 разрешения распознавания изображены на одном чертеже.
Бумажный денежный знак 13 изображен в верхней части Фиг. 3. Направление X первичного сканирования является направлением сверху вниз на Фиг. 3; направление Y вторичного сканирования является направлением справа налево на Фиг. 3. Четыре экземпляра бумажного денежного знака 13 расположены в ряд в направлении Y вторичного сканирования.
Сигнал d2 разрешения распознавания изображен в нижней части Фиг. 3. Направление слева направо на Фиг. 3 указывает интервалы считывания в направлении Y вторичного сканирования. Направление сверху вниз на Фиг. 3 показывает выходное значение сигнала d2 разрешения распознавания.
Сигнал d2 разрешения распознавания является сигналом прямоугольной формы. Сигнал d2 разрешения распознавания имеет значение ‘1’ в интервалах в направлении Y вторичного сканирования, в которых размещен бумажный денежный знак 13. Сигнал d2 разрешения распознавания имеет значение ‘0’ в интервалах в направлении Y вторичного сканирования, в которых не размещен бумажный денежный знак 13.
Сигнал d2 разрешения распознавания является сигналом, который указывает, является ли распознавание действительным или недействительным в интервалах считывания в направлении Y вторичного сканирования. Сигнал d2 разрешения распознавания имеет значение ‘1’ в интервалах, в которых бумажный денежный знак 13 проходит через область распознавания (в интервалах, в которых распознается магнитная структура). Сигнал d2 разрешения распознавания имеет значение ‘0’ в интервалах, в которых бумажный денежный знак 13 не проходит через область распознавания.
Интервалы, в которых бумажный денежный знак 13 проходит через область распознавания, являются интервалами, в которых распознавание магнитной структуры является действительным. Интервалы, в которых бумажный денежный знак 13 не проходит через область распознавания, являются интервалами, в которых распознавание магнитной структуры является недействительным.
Фиг. 4(a)-4(e) демонстрируют схемы хронирования, иллюстрирующие сигналы, выдаваемые блоком 3 А/Ц преобразования по Фиг. 1. На Фиг. 4(a)-4(e) горизонтальная ось указывает время, и вертикальная ось указывает уровень сигнала.
Принимая сигнал d1 распознавания на входе, блок 3 А/Ц преобразования работает в синхронизации с сигналом SRT сброса системы, тактовым сигналом SCL системы и сигналом LSY строчной синхронизации. Сигнал SRT сброса системы показан на Фиг. 4(a). Тактовый сигнал SCL системы показан на Фиг. 4(b). Сигнал LSY строчной синхронизации показан на Фиг. 4(c). Блок 3 А/Ц преобразования выполняет А/Ц преобразование сигнала d1 распознавания и выдает данные d3 распознавания в цифровой форме. Данные d3 распознавания в цифровой форме показаны на Фиг. 4(d). Сигнал d2 разрешения распознавания показан на Фиг. 4 (e).
Когда система сбрасывается, сигнал SRT сброса системы изменяется с ‘1’ на ‘0’, а затем обратно на ‘1’.
Сигнал LSY строчной синхронизации изменяется с ‘1’ на ‘0’ и затем обратно на ‘1’, когда выводятся данные d3 распознавания для строки La распознавания. Данные d3 распознавания для соответствующих строк La выводятся по очереди. На Фиг. 4(d) показаны строка La1 распознавания, строка La2 распознавания и строка La3 распознавания, выровненные в направлении оси времени.
Сигнал d2 разрешения распознавания имеет значение ‘0’ для строк La1 и La2 распознавания.
Сигнал d2 разрешения распознавания имеет значение ‘1’ в строке La3 распознавания и после нее.
Чтобы подчеркнуть, что данные d3 распознавания указывают значение для каждого элемента 11 распознавания, ниже иногда будут использоваться условные символы d4(i). Условный символ i указывает, что данные ассоциированы с i-ым элементом 11 распознавания в линейном датчике 12. То же самое относится к другим данным, к которым прикреплен условный символ i. Для указания данных в каждой строки La распознавания иногда будет добавлен символ ‘(j)’. Условный символ j указывает, что данные ассоциированы с j-ой строкой La распознавания в направлении Y вторичного сканирования. ‘(i)’ или ‘(j)’ не будут указаны, если нет необходимости подчеркнуть, что данные ассоциированы с отдельными элементами 11 распознавания или строками La распознавания.
Блок 4 коррекции компонента постоянного тока принимает на входе данные d3(i) распознавания и сигнал d2 разрешения распознавания. Блок 4 коррекции компонента постоянного тока выдает скорректированные данные d4(i) распознавания, в которых устранен компонент постоянного тока.
Блок 4 коррекции компонента постоянного тока имеет блок 41 формирования значения оценки наличия/отсутствия структуры, блок 42 обновления данных коррекции, блок 43 вычитания данных коррекции и линейную память 44 данных коррекции. Блок 4 коррекции компонента постоянного тока может также иметь блок 45 задержки.
Блок 41 формирования значения оценки наличия/отсутствия структуры сравнивает данные d3(i) распознавания и данные d44(i) коррекции и определяет, имеется ли структура или отсутствует. Данные d3(i) распознавания - это данные распознавания, полученные каждым элементом 11 распознавания (i-ым элементом распознавания). Данные d44(i) коррекции - это данные, относящиеся к i-ому элементу 11 распознавания, сохраняемые в линейной памяти 44 данных коррекции. Значение d41 оценки наличия/отсутствия структуры представляет степень включения компонентов сигнала, соответствующих магнитной структуре. Блок 41 формирования значения оценки наличия/отсутствия структуры выдает значение d41 оценки наличия/отсутствия структуры. В нижеследующем описании линейная память 44 данных коррекции используется для хранения данных коррекции, но память не обязательно должна быть линейной памятью, коль скоро она является памятью, которая хранит данные; нижеследующее является примером.
Решение о наличии или отсутствии структуры является решением о степени включения компонентов сигнала, соответствующих магнитной структуры. На основании решения о наличии/отсутствии структуры блок 41 формирования значения оценки наличия/отсутствия структуры выдает значение оценки (значение d41 оценки наличия/отсутствия структуры), представляющее степень включения компонентов сигнала, соответствующих магнитной структуре.
В качестве значения d41 оценки наличия/отсутствия структуры используется, например, значение, указывающее вариационный компонент данных d3 распознавания каждого элемента 11 распознавания. Более конкретно, в качестве значения, указывающего вариационный компонент данных распознавания каждого элемента 11 распознавания используется разность значений данных между данными d3 распознавания и данными d44 коррекции или величина изменения в значении данных. В качестве альтернативы, значение, полученное обобщением разностей значений данных d3 распознавания по отношению к данным d44 коррекции или величин изменения в значении данных, используется в качестве вариационного компонента данных распознавания элемента 11 распознавания. Значение, полученное обобщением, представляет собой, например, среднее значение для абсолютных значений разности для всей строки La распознавания. ‘Разность’ представляет собой разность двух значений.
Блок 41 формирования значения оценки наличия/отсутствия структуры определяет, например, среднее значение MAD(j) абсолютных значений разности между данными d3(i) распознавания и данными d44(i) коррекции для того же элемента 11 распознавания для каждой строки La распознавания (ниже определяемое таким образом среднее значение будет называться средним значением MAD(j) строки). Блок 41 формирования значения оценки наличия/отсутствия структуры выдает это среднее значение MAD(j) строки в качестве значения d41(j) оценки наличия/отсутствия структуры. ‘Абсолютное значение разности’ является абсолютным значением разности двух значений.
Как описано выше, об абсолютном значении разности данных d3(i) распознавания и данных d44(i) коррекции, относящихся к тому же элементу 11 распознавания можно сказать, что оно представляет величину изменения данных d3(i) распознавания по отношению к данным d44(i) коррекции. Данные d44(i) коррекции представляют компонент постоянного тока, включенный в данные d3 распознавания для каждого элемента 11 распознавания, определяемый из результатов распознавания вплоть до предыдущей строки La распознавания. ‘Предыдущая строка распознавания’ является строкой La распознавания, распознанной на одну строку ранее строки La распознавания, распознаваемой в данный момент.
Когда величина изменения в данных d3(i) по отношению к данным d44(i) коррекции, представляющим компонент постоянного тока, велика, можно сделать вывод о том, что в распознаваемую в данный момент строку La распознавания включена большая величина компонентов сигнала, соответствующих магнитной структуре. Напротив, когда величина изменения в данных d3(i) распознавания по отношению к данным d44(i) коррекции, представляющим компонент постоянного тока, мала, можно сделать вывод о том, что лишь малая величина компонентов сигнала, соответствующих магнитной структуре, включена в распознаваемую в данный момент строку La распознавания.
Блок 42 обновления данных коррекции получает взвешенную сумму данных d3(i) распознавания и данных d44(i) коррекции. Блок 42 обновления данных коррекции получает эту взвешенную сумму на основании значения d41(j) оценки наличия/отсутствия структуры и сигнала d2 разрешения распознавания. Значение d41(j) оценки наличия/отсутствия структуры является значением, выдаваемым блоком 41 формирования значения оценки наличия/отсутствия структуры. Блок 42 обновления данных коррекции выдает результат такого сложения в качестве новых данных d42(i) коррекции. ‘Новые данные коррекции’ являются обновленными данными коррекции.
Блок 42 обновления данных коррекции получает взвешенную сумму данных d3(i) распознавания и данных d44(i) коррекции, когда сигнал d2 разрешения распознавания имеет значение ‘1’. Блок 42 обновления данных коррекции получает обновленные данные d42(i) коррекции. Когда на основании значения оценки d41(j) наличия/отсутствия структуры имеется большая величина компонентов сигнала, соответствующих магнитной структуре, блок 42 обновления данных коррекции увеличивает вес данных d44 коррекции. Когда имеется малая величина компонентов сигнала, соответствующих магнитной структуре, блок 42 обновления данных коррекции увеличивает вес данных d3(i) распознавания.
Интервал, в котором сигнал d2 разрешения распознавания имеет значение ‘1’, является интервалом, в котором распознавание магнитной структуры является действительным. Значение d41(j) оценки наличия/отсутствия структуры является результатом решения, выдаваемого блоком 41 формирования значения оценки наличия/отсутствия структуры.
Когда сигнал d2 разрешения распознавания имеет значение ‘0’ (интервал, в котором распознавание магнитной структуры является недействительным), блок 42 обновления данных коррекции увеличивает вес данных d3(i) распознавания независимо от значения d41(j) значения оценки наличия/отсутствия структуры блока 41 формирования значения оценки наличия/отсутствия структуры. Значение d41(j) оценки наличия/отсутствия структуры является результатом решения о наличии/отсутствии структуры блока 41 формирования значения оценки наличия/отсутствия структуры.
Блок 42 обновления данных коррекции получает взвешенную сумму данных d3(i) распознавания и данных d44(i) коррекции. Блок 42 обновления данных коррекции таким образом получает обновленные данные d42(i) коррекции.
Фиг. 5 - это блок-схема, демонстрирующая пример структуры блока 42 обновления данных коррекции.
Блок 42 обновления данных коррекции имеет блок 421 формирования весовых коэффициентов, блок 422 вычисления данных коррекции и блок 423 задания параметров.
Блок 421 формирования весовых коэффициентов принимает на входе значение d41(j) оценки наличия/отсутствия структуры и сигнал d2 разрешения распознавания. Блок 421 формирования весовых коэффициентов выдает весовой коэффициент K3(j) данных распознавания и весовой коэффициент K44(j) данных коррекции в блок 422 вычисления данных коррекции.
Когда сигнал d2 разрешения распознавания имеет значение ‘1’ (интервал, в котором распознавание магнитной структуры является действительным), блок 421 формирования весовых коэффициентов вычисляет весовой коэффициент K44(j) данных коррекции из отношения, показанного в следующем математическом выражении (1).
[Математическое выражение 1]
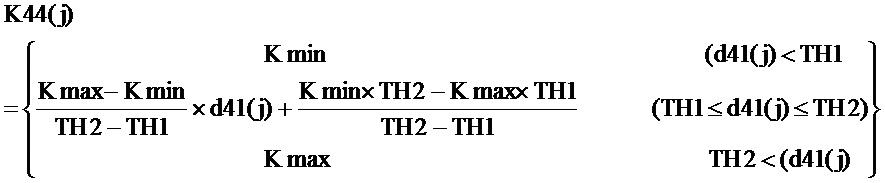
В выражении (1) применяются следующие определения.
TH1 - первое пороговое значение.
TH2 - второе пороговое значение.
Kmax - максимальное значение весового коэффициента данных коррекции.
Kmin - минимальное значение весового коэффициента данных коррекции.
Первое пороговое значение TH1 и второе пороговое значение TH2 соответствуют отношению TH1≤TH2.
Максимальное значение Kmax весового коэффициента данных коррекции и минимальное значение Kmin весового коэффициента данных коррекции соответствуют отношению 0≤Kmin≤Kmax≤1.
То есть когда значение оценки наличия/отсутствия структуры меньше первого порогового значения, блок 421 формирования весовых коэффициентов выдает минимальное значение весового коэффициента данных коррекции в качестве весового коэффициента данных коррекции.
Когда значение оценки наличия/отсутствия структуры больше второго порогового значения, блок 421 формирования весовых коэффициентов выдает максимальное значение весового коэффициента данных коррекции в качестве весового коэффициента данных коррекции.
Когда значение оценки наличия/отсутствия структуры больше или равно первому пороговому значению и меньше или равно второму пороговому значению, блок 421 формирования весовых коэффициентов выдает в качестве весового коэффициента данных коррекции значение, которое монотонно увеличивается по отношению к значению оценки наличия/отсутствия структуры в интервале от минимального значения весового коэффициента данных коррекции до максимального значения весового коэффициента данных коррекции.
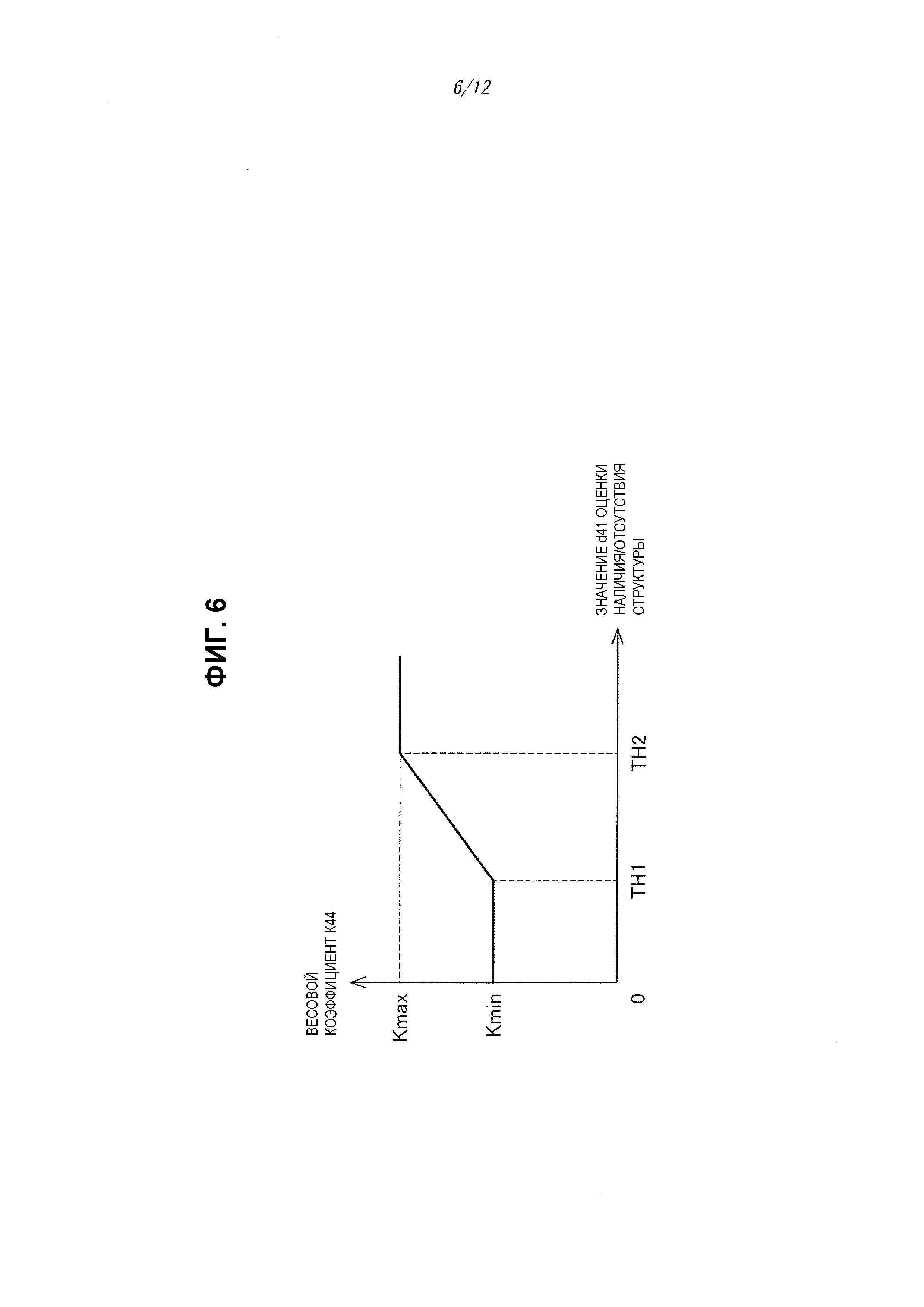
Отношение в выражении (1) показано на Фиг. 6. Фиг. 6 иллюстрирует отношение между данными на входе и на выходе блока 421 формирования весовых коэффициентов. Горизонтальная ось представляет значение d41 оценки наличия/отсутствия структуры. Вертикальная ось представляет весовой коэффициент K44.
Теперь будет описана работа блока 421 формирования весовых коэффициентов, проиллюстрированная выражением (1) и Фиг. 6. Интервал, в котором сигнал d2 разрешения распознавания имеет значение ‘1’ - это интервал, в котором выполняется распознавание магнитной структуры (интервал действительного распознавания магнитной структуры). Интервал, в котором сигнал d2 разрешения распознавания имеет значение ‘0’ - это интервал, в котором распознавание магнитной структуры не выполняется (интервал недействительного распознавания магнитной структуры).
Сначала будет описана работа в случае, когда сигнал d2 разрешения распознавания имеет значение ‘1’.
При работе блока 421 формирования весовых коэффициентов имеют место следующие три случая.
В первом случае, когда значение d41(j) оценки наличия/отсутствия структуры меньше первого порогового значения TH1, блок 421 формирования весовых коэффициентов обнаруживает, что магнитная структура отсутствует. Блок 421 формирования весовых коэффициентов выдает минимальное значение Kmin весового коэффициента данных коррекции в качестве весового коэффициента K44(j) данных коррекции. ‘Отсутствие магнитной структуры’ означает, что включена пренебрежимо малая величина компоненты сигнала, соответствующие магнитной структуре.
Во втором случае, когда значение d41(j) оценки наличия/отсутствия структуры больше второго порогового значения TH2, блок 421 формирования весовых коэффициентов обнаруживает наличие магнитной структуры. Блок 421 формирования весовых коэффициентов выдает максимальное значение Kmax весового коэффициента данных коррекции в качестве весового коэффициента K44(j) данных коррекции. ‘Наличие магнитной структуры’ означает, что включена большая величина компонентов сигнала, соответствующих магнитной структуре.
В третьем случае, когда значение d41(j) оценки наличия/отсутствия структуры больше или равно первому пороговому значению TH1 и меньше или равно второму пороговому значению TH2, блок 421 формирования весовых коэффициентов выдает значение, определяемое характеристикой, которая монотонно увеличивается от минимального значения Kmin до максимального значения Kmax весового коэффициента данных коррекции в качестве весового коэффициента K44(j) данных коррекции.
Далее будет описана работа, когда сигнал d2 разрешения распознавания имеет значение ‘0’.
Блок 421 формирования весовых коэффициентов вычисляет весовой коэффициент K44(j) данных коррекции из отношения, указанного в следующем выражении (2).
K44(j)=Krst (2)
Здесь Krst - параметр, указывающий значение весового коэффициента K44(j) данных коррекции во время интервалов недействительного распознавания магнитной структуры. Krst соответствует отношению 0≤Krst≤Kmin.
Как показано в выражении (2), когда сигнал d2 разрешения распознавания имеет значение ‘0’, блок 421 формирования весовых коэффициентов выдает весовой коэффициент K44(j) данных коррекции без учета значения d41(j) оценки наличия/отсутствия структуры. В это время значение весового коэффициента K44(j) данных коррекции является значением Krst. Значение Krst меньше или равно значению Kmin. Сигнал d2 разрешения распознавания имеет значение ‘0’ в интервалах, в которых распознавание магнитной структуры является недействительным.
Блок 421 формирования весовых коэффициентов также вычисляет весовой коэффициент K3(j) данных распознавания, который дает в сумме 1 при сложении с весовым коэффициентом K44(j) данных коррекции, как следует из отношения, показанного выражением (3).
K3(j)=1-K44(j) (3)
Как описано выше, блок 421 формирования весовых коэффициентов формирует весовой коэффициент K44(j) данных коррекции, который увеличивается, когда значение d41(j) оценки наличия/отсутствия структуры велико, и весовой коэффициент K3(j) данных распознавания, который в сумме с весовым коэффициентом K44(j) данных коррекции дает 1.
Далее блок 422 вычисления данных коррекции получает взвешенную сумму данных d3(i) распознавания и данных d44(i) коррекции согласно выражению (4), приведенному ниже. Затем блок 422 вычисления данных коррекции выдает обновленные данные d42(i) коррекции. При получении взвешенной суммы блок 422 вычисления данных коррекции использует весовые коэффициенты K3(j) и K44(j).
d42(i)=K44(j)×d44(i)+K3(j)×d3(i) (4)
Как показано в вышеприведенном выражении, блок 422 вычисления данных коррекции умножает данные d44(i) коррекции на весовой коэффициент K44(j) данных коррекции, умножает данные d3(i) распознавания на весовой коэффициент K3(j) данных распознавания и выполняет сложение (взвешенное сложение) результатов умножения.
Блок 423 задания параметров сохраняет параметры TH1, TH2, Kmax, Kmin и Krst, которые заранее установлены пользователем. Блок 423 задания параметров выдает параметры TH1, TH2, Kmax, Kmin и Krst в блок 421 формирования весовых коэффициентов. Задание параметров TH1, TH2, Kmax, Kmin и Krst не ограничено их получением от пользователя. Они могут также быть установлены изготовителем на линии производства или где-либо еще. То есть параметры TH1, TH2, Kmax, Kmin и Krst устанавливаются извне.
Первое пороговое значение TH1 и второе пороговое значение TH2 задаются с учетом отношения сигнала к шуму для устройства считывания информации. Это делается для того, чтобы сделать все возможное для предотвращения возникновения некорректных решений по сигналу или невозможности обнаружения сигнала из-за шума.
Максимальное значение Kmax весового коэффициента данных коррекции задано в виде 1 или значения, близкого к 1. Это делается для того, чтобы придать большой вес данным d44(i) коррекции при обновлении данных коррекции, когда определено, что имеются компоненты сигнала, соответствующие магнитной структуре. Здесь то, что ‘имеются компоненты сигнала’, означает что имеется достаточно большая величина компонентов сигнала.
Минимальное значение Kmin весового коэффициента данных коррекции задано с учетом быстроты изменений в уровне сигнала распознавания и частотной характеристики сигнала. Это делается для того, чтобы гарантировать, что при том, что изменения в уровне сигнала распознавания отражаются при обновлении данных коррекции, когда определено, что компоненты сигнала, соответствующие магнитной структуре, отсутствуют, низкочастотные компоненты сигнала распознавания не удаляются. Здесь то, что ‘компоненты сигнала отсутствуют’ означает наличие пренебрежимо малой величины компонентов сигнала.
Весовой коэффициент Krst данных коррекции в интервалах недействительного распознавания магнитной структуры задан в значении, меньшем или равном Kmin. Это делается для того, чтобы придать данным d3(i) распознавания больший вес по отношению к данным коррекции.
Устройство выполнено с обеспечением возможности обновления этих параметров извне, например пользователем.
Блок 42 обновления данных коррекции выдает обновленные данные d42(i) коррекции посредством вышеописанной конфигурации.
Блок 43 вычитания данных коррекции вычитает данные d42(i) коррекции, обновленные блоком 42 обновления данных коррекции, из данных d3(i) распознавания. Блок 43 вычитания данных коррекции выдает результат этого вычитания в качестве скорректированных данных d43(i) распознавания.
Линейная память 44 данных коррекции сохраняет обновленные данные d42(i) коррекции для одной строки La распознавания. Обновленные данные d42(i) коррекции являются данными, обновленными блоком 42 обновления данных коррекции. Обновленные данные d42(i) коррекции, сохраняемые в линейной памяти 44 данных коррекции, используются при обработке следующей строки La распознавания блоком 41 формирования значения оценки наличия/отсутствия структуры и блоком 42 обновления данных коррекции в качестве данных d44(i) коррекции.
Посредством вышеописанной конфигурации блок 4 коррекции компонента постоянного ока выдает скорректированные данные d43(i) распознавания в качестве данных d4(i) распознавания со скорректированным компонентом постоянного тока.
Данные d4(i) распознавания со скорректированным компонентом постоянного тока, выдаваемые блоком 4 коррекции компонента постоянного тока, передаются в блок 5 обработки сигнала. Блок 5 обработки сигнала включает в себя, например, схему регулирования усиления, которая регулирует усиление, или схему уменьшения шума, которая выполняет уменьшение шума. Блок 5 обработки сигнала выполняет обработку сигнала, такую как регулирование усиления или уменьшение шума, для скорректированных данных d4(i) распознавания. Затем блок 5 обработки сигнала выдает обработанные данные d5(i) распознавания.
Работа блока 4 коррекции компонента постоянного тока в устройстве 100 считывания информации согласно первому варианту выполнения будет описана ниже с обращением к Фиг. 7.
Фиг. 7 - это блок-схема, иллюстрирующая работу блока 4 коррекции компонента постоянного тока.
Обработка посредством блока 4 коррекции компонента постоянного тока выполняется по одной строке La распознавания. Сначала на этапе S0 вводят данные d3(i) распознавания для одной строки La распознавания.
На этапе S1 считывания данных коррекции считывают данные d44(i) коррекции для одной строки La распознавания, сохраняемые в линейной памяти 44 данных коррекции.
Затем на этапе S2 определения наличия/отсутствия структуры определяют среднее значение MAD(j) строки для абсолютных значений разности между данными d3(i) распознавания и данными d44(i) коррекции для тех же элементов 11 распознавания. На этапе S2 определения наличия/отсутствия структуры выдают это среднее значение MAD(j) строки в качестве значения d41(j) оценки наличия/отсутствия структуры для строки La распознавания, для которой производится обработка сигнала. ‘Среднее значение строки’ является значением, получаемым делением суммы значений, основанных на выходных данных элементов распознавания, расположенных в линию, на число элементов распознавания. То есть это среднее значение из значений, полученных распознаванием в строке La распознавания.
Далее на этапе S3 обновления данных коррекции обновляют данные d44(i) коррекции на основании значения d41(j) оценки наличия/отсутствия структуры. Это обновление выполняется для всех элементов распознавания в строке La распознавания, для которой производится обработка сигнала.
На этапе S3 обновления данных коррекции сначала формируют весовые коэффициенты K3(j) и K44(j) на основании значения d41(j) оценки наличия/отсутствия структуры и сигнала d2 разрешения распознавания на этапе S31 формирования весовых коэффициентов.
Фиг. 8 - это блок-схема, иллюстрирующая подробности этапа S31 формирования весовых коэффициентов.
На этапе S310 проверяют d2 разрешения распознавания для строки La распознавания, для которой производится обработка сигнала. Если на этапе S310 сигнал d2 разрешения распознавания для строки La распознавания, для которой производится обработка сигнала, имеет значение ‘1’ (интервал действительного распознавания магнитной структуры; Да в условном переходе на этапе S310), процесс переходит к этапу S311. На этапе S311 формируют весовой коэффициент K44(j) на основании условного выражения (выражения (1)) в зависимости от значения d41(j) оценки наличия/отсутствия структуры, и процесс переходит к этапу S312. Далее на этапе S312 формируют весовой коэффициент K3(j) на основании выражения (3).
Напротив, если сигнал d2 разрешения распознавания для строки La распознавания, для которой производится обработка сигнала, имеет значение ‘0’ (интервал недействительного распознавания магнитной структуры; Нет в условном переходе на этапе S310), формируют весовой коэффициент K44(j) на основании условного выражения (выражения (2)), который не зависит от значения d41(j) оценки наличия/отсутствия структуры, и процесс переходит к этапу S312. Затем на этапе S312 формируют весовой коэффициент K3(j) на основании выражения (3).
Теперь описание возвращается к Фиг. 7.
На этапе S32 вычисления данных коррекции используют сформированные весовые коэффициенты K3(j) и K44(j) для получения взвешенной суммы данных d3(i) распознавания и данных d44(i) коррекции в соответствии с выражением (4). Значение взвешенной суммы выводят в качестве обновленных данных d42(i) коррекции.
Здесь взвешенную сумму получают из данных d3(i) распознавания и данных d44(i) коррекции для того же элемента 11 распознавания. Обработка одной строки La распознавания на этапе S32 вычисления данных коррекции завершается получением вышеупомянутой взвешенной суммы для всех элементов 11 распознавания в одной строке La распознавания.
После того, как данные коррекции для одной строки La распознавания обновлены на этапе S3 обновления данных коррекции, обновленные данные d42(i) коррекции записывают в линейную память 44 данных коррекции на этапе S4 записи данных коррекции.
Далее на этапе S5 вычитают обновленные данные d42(i) коррекции из данных d3(i) распознавания. Этим вычитанием на этапе S5 получают скорректированные данные d4(i) распознавания. Здесь вычитание выполняют для данных d3(i) распознавания и обновленных данных d42(i) коррекции для того же элемента 11 распознавания.
Далее скорректированные данные d4(i) распознавания, полученные на этапе S5, выдают на этапе S6. Обработку на этапе S6 также выполняют по одной строке La распознавания. Скорректированные данные распознавания для одной строки La распознавания выводят на этапе S6. ‘По одной строке La распознавания’ означает для всех элементов распознавания в строке La распознавания, для которой производится обработка сигнала.
Когда обработка одной строки La распознавания завершена, процесс возвращается к этапу S0 и начинается обработка следующей строки La распознавания. Когда подобная обработка завершена для всех строк La распознавания (Да в условном переходе на этапе S7), процесс завершается.
В качестве дополнения может быть предусмотрен блок 45 задержки, указанный пунктирной линией на Фиг. 1.
На Фиг. 1 блок 45 задержки (указанный пунктирной линией) расположен на стороне входа блока 43 вычитания данных коррекции. То есть данные d3(i) распознавания могут быть введены в блок 43 вычитания данных коррекции через блок 45 задержки. Это делается для того, чтобы вычесть обновленные данные d42(i) коррекции из данных d3(i) распознавания, которые использовались для их обновления. В этом случае время задержки, обеспечиваемое блоком 45 задержки, эквивалентно времени, необходимому для обработки, выполняемой блоком 41 формирования значения оценки наличия/отсутствия структуры и блоком 42 обновления данных коррекции.
Выше приведено описание работы блока 4 коррекции компонента постоянного тока в устройстве 100 считывания информации согласно первому варианту выполнения настоящего изобретения.
Далее с использованием Фиг. 9(a)-9(d) и 10(a)-10(d) будут описаны эффекты, обеспечиваемые блоком 4 коррекции компонента постоянного тока в устройстве 100 считывания информации согласно первому варианту выполнения настоящего изобретения.
Фиг. 9(a)-9(d) и 10(a)-10(d) демонстрируют профили данных для различных линий MSa и MSb, проходящих в направлении Y вторичного сканирования на бумажном денежном знаке 13 по Фиг. 2. На каждой из Фиг. 9(a)-9(d) и 10(a)-10(d), горизонтальная ось указывает направление Y вторичного сканирования и вертикальная ось указывает значение сигнала.
Фиг. 9(a) и 10(a) показывают данные d3(i) распознавания (i=a, b) для соответствующих линий MSa, MSb в направлении Y вторичного сканирования. Как показано на Фиг. 2, элемент 11 распознавания, расположенный на линии MSa, является элементом 11 распознавания, отличным от элемента 11 распознавания, расположенным на линии MSb. То есть Фиг. 9(a) и 10(a) представляют данные d3 распознавания для различных элементов 11 распознавания в соответствии с положением в направлении Y вторичного сканирования. Эти данные d3(i) распознавания представляют собой соответствующие последовательности данных d3(i) распознавания, считываемых различными элементами 11(a), 11(b) распознавания в линейном датчике 12.
Фиг. 9(b) и 10(b) демонстрируют обновленные данные d42(i) коррекции (i=a, b) для линий MSa и MSb в направлении Y вторичного сканирования.
Фиг. 9(c) и 10(c) демонстрируют данные d4(i) распознавания (i=a, b) со скорректированным компонентом постоянного тока для линий MSa и MSb в направлении Y вторичного сканирования.
Фиг. 9(d) и 10(d) демонстрируют сигнал d2 разрешения распознавания.
На линиях MSa и MSb в направлении Y вторичного сканирования, показанных на Фиг. 2, имеются области MG1 и MG2, имеющие магнитные структуры, сформированные печатью магнитными чернилами на бумажном денежном знаке 13. Как показано на Фиг. 9(a) и 10(a), компоненты сигнала, соответствующие магнитным структурам, появляются в положениях SG1 и SG2, соответствующих этим областям.
На линии MSa в направлении Y вторичного сканирования уровень сигнала распознавания стремится к постепенному повышению от одного конца к другому. На линии MSb в направлении Y вторичного сканирования, уровень сигнала распознавания стремится к постепенному снижению от одного конца к другому.
На Фиг. 2 ‘от одного конца к другому’ означает ‘от верхнего конца к нижнему концу’. На Фиг. 9(a)-9(d) и 10(a)-10(d), ‘от одного конца к другому’ означает ‘от левого конца к правому концу’.
Уровень сигнала распознавания от элемента 11 распознавания (элемента магнитного датчика) может быть различным из-за температуры и других факторов во время интервала, в котором считывается один экземпляр бумажного денежного знака. То, каким образом изменяется уровень сигнала распознавания, также может различаться от одного элемента 11 распознавания к другому. Таким образом, неоднородность уровня сигнала распознавания в направлении X первичного сканирования проявляется в виде полосового шума в направлении Y вторичного сканирования в данных d3(i) распознавания.
Способ коррекции смещения, показанный в патентном источнике 1, вычисляет значение коррекции смещения только в интервалах между одним экземпляром бумажного денежного знака и другим. То есть способ коррекции смещения, показанный в патентном источнике 1, вычисляет значение коррекции смещения в интервалах недействительного магнитного распознавания. Таким образом, когда уровень выходного сигнала изменяется при считывании одного экземпляра бумажного денежного знака, даже если неоднородность уровня сигнала распознавания в направлении X первичного сканирования подавляется у переднего края бумажного денежного знака, уровни выходного сигнала, которые неоднородны в направлении X первичного сканирования, могут иметь место у заднего края бумажного денежного знака.
Здесь ‘у переднего края бумажного денежного знака’ означает область на экземпляре бумажного денежного знака, в которой начинается считывание. ‘У заднего края бумажного денежного знака’ означает область на экземпляре денежного знака, в которой считывание заканчивается. То есть существует проблема сниженной точности идентификации бумажного денежного знака, поскольку способ коррекции смещения по патентному источнику 1 не способен полностью устранить полосовой шум.
Настоящее изобретение направлено на решение данной проблемы путем обновления значения коррекции смещения во время интервалов действительного распознавания магнитной структуры, как описано выше. Значение коррекции смещения взвешивается в соответствии с наличием или отсутствием компонентов сигнала, соответствующих магнитной структуре.
Этот момент будет пояснен ниже.
Обновленные данные d42(i) коррекции, показанные на Фиг. 9(b) и 10(b), представляют результат определения компонента постоянного тока в данных распознавания на основании данных d3(i) распознавания от начала считывания до строки La распознавания (строки в направлении X первичного сканирования) на одну строку раньше.
Изменение компонента постоянного тока не является значительным между строкой La распознавания в направлении X первичного сканирования на одну строку раньше и текущей строкой La распознавания в направлении X первичного сканирования. Компонент постоянного тока в данных d3(i) распознавания, таким образом, является одинаковым в строке La распознавания в направлении X первичного сканирования на одну строку раньше и текущей строке La распознавания в направлении X первичного сканирования. Здесь ‘компонент постоянного тока’ является значением, получаемым путем вычитания компонентов сигнала, соответствующих магнитной структуре, из данных d3(i) распознавания для текущей строки La распознавания в направлении X первичного сканирования.
В блоке 4 коррекции компонента постоянного тока в устройстве 100 считывания информации в первом варианте выполнения, когда сигнал d2 разрешения распознавания имеет значение ‘0’ (в интервале недействительного распознавания магнитной структуры), вес данных d3(i) распознавания при формировании обновленных данных d42(i) коррекции увеличивается. В начальной точке считывания бумажного денежного знака значение обновленных данных d42(i) коррекции, таким образом, соответствует значению данных d3(i) распознавания.
Есть моменты, когда из внешнего сигнала, такого как сигнал d2 разрешения распознавания, уже известно, что компоненты сигнала, соответствующие магнитной структуре, отсутствуют. В эти моменты блок 42 обновления данных коррекции увеличивает вес данных d3(i) распознавания вне зависимости от значения d41(j) оценки наличия/отсутствия структуры от блока 41 формирования значения оценки наличия/отсутствия структуры. Это улучшает характеристики отслеживания обновленных данных d42(i) коррекции по отношению к данным d3 распознавания. Данные d44(i) коррекции также могут быть инициализированы в течение краткого периода времени между двумя экземплярами бумажного денежного знака 13.
При вхождении в интервал, в котором сигнал d2 разрешения распознавания имеет значение ‘1’ (интервал действительного распознавания магнитной структуры), блок 4 коррекции компонента постоянного тока определяет весовые коэффициенты в соответствии со значением d41(j) оценки наличия/отсутствия структуры от блока 41 формирования значения оценки наличия/отсутствия структуры. Значение d41(j) оценки наличия/отсутствия структуры указывает степень включения магнитной структуры в данных d3(i) распознавания. Блок 4 коррекции компонента постоянного тока выполняет обновление данных коррекции с использованием определенных весовых коэффициентов K3 и K44.
Когда магнитная структура отсутствует, блок 4 коррекции компонента постоянного тока увеличивает вес данных d3(i) распознавания и получает взвешенную сумму данных d3(i) распознавания и данных d44(i) коррекции. Затем он далее обновляет обновленные данные d42(i) коррекции. Обновленные данные d42(i) коррекции, соответственно, приближаются к данным d3(i) распознавания.
Однако когда магнитная структура присутствует, блок 4 коррекции компонента постоянного тока увеличивает вес данных d44(i) коррекции и получает взвешенную сумму данных d3(i) распознавания и данных d44(i) коррекции. Затем он далее обновляет обновленные данные d42(i) коррекции. Обновленные данные d42(i) коррекции, соответственно, приближаются к данным d44(i) до коррекции. Это означает, что сохраняются данные d44(i) коррекции, определенные на основании данных d3(i) распознавания в различных строках La распознавания.
В случаях, промежуточных между ситуацией, в которой ‘магнитная структура присутствует’ и ситуацией, в которой ‘магнитная структура отсутствует’, блок 4 коррекции постоянного тока определяет весовые коэффициенты K3(j) и K44(j) в соответствии со значением d41(j) оценки наличия/отсутствия структуры. «Случаи, промежуточные между ситуацией, в которой ‘магнитная структура присутствует’ и ситуацией, в которой ‘магнитная структура отсутствует’» - это случаи, при которых среднее значение MAD(j) линии абсолютных значений больше или равно пороговому значению TH1 и меньше или равно пороговому значению TH2. ‘В соответствии со значением d41(j) оценки наличия/отсутствия структуры’ означает ‘в соответствии со степенью включения компонентов сигнала, соответствующих магнитной структуре’. Блок 4 коррекции компонента постоянного тока использует определенные весовые коэффициенты K3, K44 для обновления обновленных данных d42(i) коррекции.
Например, однобитовый сигнал может выражать только одно из двух состояний.
Если бы значение d41(j) оценки наличия/отсутствия структуры составляло, например, всего один бит, то оно могло бы выражать одно из ‘магнитная структура присутствует’ или ‘магнитная структура отсутствует’. В первом варианте выполнения значение d41(j) оценки присутствия/отсутствия структуры не является значением (однобитовым значением), которое может указывать только ‘магнитная структура присутствует’ или ‘магнитная структура отсутствует’. Значение, которое непрерывно изменяется в соответствии со степенью включения компонентов сигнала, соответствующих магнитной структуре, используется в качестве значения d41(j) оценки наличия/отсутствия структуры. Блок 421 формирования коэффициентов взвешивания выполнен с возможностью формирования коэффициентов K44(j), K3(j) взвешивания, которые постоянно изменяются в соответствии со значением d41(j) оценки наличия/отсутствия структуры. Блок 4 коррекции компонента постоянного тока может при этом выполнять надлежащее обновление в соответствии со степенью включения компонентов сигнала, соответствующих магнитной структуре.
Когда нет ничего кроме ‘магнитная структура присутствует’ или ‘магнитная структура отсутствует’, в местах переходов между этими двумя значениями могут появляться ступенчатые края в двумерном изображении, представленном скорректированными данными d4 распознавания. Первый вариант выполнения стремится исключать такие ступенчатые края путем обработки в соответствии со степенью наличия/отсутствия структуры.
Данные d4(i) распознавания со скорректированным компонентом постоянного тока, показанные на Фиг. 9(c), получают вычитанием обновленных данных d42(i) коррекции, показанных на Фиг. 9(b), из данных d3(i) распознавания, показанных на Фиг. 9(a).
Аналогичным образом, данные d4(i) распознавания со скорректированным компонентом постоянного тока, показанные на Фиг. 10(c), получают путем вычитания обновленных данных d42(i) коррекции, показанных на Фиг. 10(b), из данных d3(i) распознавания, показанных на Фиг. 10(a).
Как показано на Фиг. 9(c) и 10(c), компоненты сигнала, которые соответствуют магнитным структурам в областях MG1 и MG2 и которые имеются на участках SG1 и SG2, не теряются в данных d4(i) распознавания со скорректированным компонентом постоянного тока.
Как также показано на Фиг. 9(c) и 10(c), в местах (отличных от SG1 и SG2), где компоненты сигнала, соответствующие магнитным структурам, отсутствуют, скорректированные данные d4(i) распознавания выровнены на уровне целевого значения TGT.
Блок 4 коррекции компонента постоянного тока таким образом подавляет неоднородность в уровне сигнала распознавания в направлении X первичного сканирования в местах, где компоненты сигнала, соответствующие магнитной структуре, отсутствуют, даже когда уровень сигнала распознавания изменяется в пределах интервала считывания одного экземпляра бумажного денежного знака. Устройство 100 считывания информации согласно первому варианту выполнения настоящего изобретения таким образом может уменьшить полосовой шум в направлении Y вторичного сканирования.
Как описано выше, в соответствии с первым вариантом выполнения изобретения данные коррекции могут обновляться в пределах интервала, в котором считывается один экземпляр бумажного денежного знака. Таким образом, первый вариант выполнения настоящего изобретения может снизить воздействие изменений в уровне сигнала распознавания, которые возникают в интервале, в котором считывается каждый объект, для которого выполняется распознавание. Первый вариант выполнения настоящего изобретения также может получать данные распознавания, в которых неоднородность уровня достаточным образом скорректирована.
Устройство 4 обработки сигнала имеет блок 41 формирования оценки наличия/отсутствия структуры, блок 42 обновления данных коррекции и блок 43 вычитания данных коррекции.
На основании данных d3 распознавания, включающих в себя компоненты сигнала распознаваемого объекта, получаемые последовательным распознаванием распознаваемого объекта элементами 11 распознавания, блок 41 формирования оценки наличия/отсутствия структуры вычисляет степень включения компонентов сигнала в данные d3 распознавания.
Блок 42 обновления данных коррекции формирует обновленные данные d42 коррекции путем получения взвешенной суммы данных d3 распознавания и данных d44 коррекции, представляющих компонент постоянного тока элементов распознавания, придавая больший вес данным d44 коррекции по мере того, как упомянутая степень возрастает, и придавая больший вес данным d3 распознавания по мере того, как упомянутая степень уменьшается.
Блок 43 вычитания данных коррекции вычитает обновленные данные d42 коррекции из данных d3 распознавания для формирования скорректированных данных распознавания.
Второй вариант выполнения
В первом варианте выполнения блок 41 формирования значения оценки наличия/отсутствия структуры использует среднее значение MAD(j) строки для абсолютных значений разностей между данными d3(i) распознавания и данными d44(i) коррекции для одних и тех же элементов 11 распознавания в качестве значения d41(j) оценки наличия/отсутствия структуры. Во втором варианте выполнения значение d41(j) оценки наличия/отсутствия структуры определяется другим способом.
Компоненты, сходные с аналогичными компонентами в устройстве 100 считывания информации в первом варианте выполнения, будут обозначены теми же условными обозначениями и их описание будет пропущено. Компоненты, сходные с аналогичными компонентами в первом варианте выполнения - это блок 10 формирования данных распознавания (блок 1 распознавания структуры и блок 3 А/Ц преобразования), блок 2 формирования разрешения распознавания, блок 42 обновления данных коррекции, линейная память 44 данных коррекции, блок 43 вычитания данных коррекции, блок 45 задержки, блок 6 управления системой и блок 5 обработки сигнала. Те же условные обозначения 100, что и в первом варианте выполнения, будут также использованы в описании устройства считывания информации.
Во втором варианте выполнения блок 41 формирования значения оценки наличия/отсутствия структуры использует, например, среднеквадратическое отклонение s(j) в строке для разностей данных d3(i) распознавания и данных d44(i) коррекции для одних и тех же элементов 11 распознавания в качестве значения d41(j) оценки наличия/отсутствия структуры.
Среднеквадратическое отклонение s(j) в строке может быть определено из нижеприведенного выражения (5).
[Математическое выражение 2]
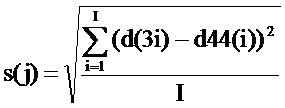 (5)
(5)
В выражении (5) применяются следующие определения.
d3(i) - данные распознавания для i-го элемента 11 распознавания в каждой строке La распознавания.
d44(i) - данные коррекции для того же i-го элемента 11 распознавания.
I - общее число элементов 11 распознавания в строке La распознавания.
В вышеописанном случае перед тем, как устройство 100 считывания информации считает информацию, блок 41 формирования значения оценки наличия/отсутствия структуры вычисляет среднеквадратическое отклонение шума. Блок 41 формирования значения оценки наличия/отсутствия структуры использует вычисленное стандартное отклонение шума в качестве вышеупомянутого первого порогового значения TH1.
В операции считывания информации устройства 100 считывания информации, когда среднеквадратическое отклонение s(j) в строке больше или равно первому пороговому значению TH1, можно сделать вывод, что в эту строку La распознавания включена большая величина компонентов сигнала, соответствующих магнитной структуре.
Когда среднеквадратическое отклонение s(j) в строке меньше первого порогового значения TH1 в операции считывания информации устройства 100 считывания информации, можно сделать вывод, что в эту строку La распознавания включена малая величина компонентов сигнала, соответствующих магнитной структуре.
Среднеквадратическое отклонение часто используется для оценки уровней шума. Вычисление среднеквадратического отклонения s(j) в строке в качестве значения d41(j) оценки наличия/отсутствия структуры способствует заданию порогового значения TH1 для решения о наличии/отсутствии структуры с учетом неоднородности в уровне сигнала распознавания из-за шума.
Третий вариант выполнения
В первом варианте выполнения определение наличия/отсутствия структуры посредством блока 41 формирования значения оценки наличия/отсутствия структуры и формирование весовых коэффициентов K3, K44 блоком 42 обновления данных коррекции выполняются для каждой строки La распознавания. Однако в третьем варианте выполнения формирование весовых коэффициентов K3, K44 выполняется для каждого элемента 11 распознавания.
В этом случае блок 4b коррекции компонента постоянного тока, показанный на Фиг. 11, используется вместо блока 4 коррекции компонента постоянного тока по Фиг. 1. Кроме того, блок 42b обновления данных коррекции, показанный на Фиг. 12, используется вместо блока 42 обновления данных коррекции по Фиг. 5.
Фиг. 11 - это блок-схема, иллюстрирующая устройство 110 считывания информации. Фиг. 12 - это блок-схема, демонстрирующая пример конфигурации блока 42b обновления данных коррекции. Компонентам, сходным с аналогичными компонентами устройства 100 считывания информации в первом варианте выполнения, будут присвоены те же условные обозначения и их описание будет пропущено. Компонентами, сходными с аналогичными компонентами в первом варианте выполнения, являются блок 10 формирования данных распознавания (блок 1 распознавания структуры и блок 3 А/Ц преобразования), блок 2 формирования разрешения распознавания, линейная память 44 данных коррекции, блок 45 задержки, блок 6 управления системой и блок 5 обработки сигнала.
Конфигурации, показанные на Фиг. 11 и 12, имеют в общем ту же структуру блоков и отношения вводов и выводов, как на Фиг. 1 и 5, но отличаются в следующих моментах.
Блок 41 формирования значения оценки наличия/отсутствия структуры в первом варианте выполнения выдает среднее значение MAD(j) строки для абсолютных значений разностей между данными d3(i) распознавания и данными d44(i) коррекции для одних и тех же элементов распознавания, в качестве значения d41(j) оценки наличия/отсутствия структуры.
В противоположность этому, блок 41b формирования значения оценки наличия/отсутствия структуры выдает абсолютное значение разности между данными d3(i) распознавания и данными d44(i) коррекции для одного и того же элемента распознавания в качестве значения d41(i) оценки наличия/отсутствия структуры для этого элемента 11 распознавания.
Блок 421 формирования весовых коэффициентов в блоке 42 обновления данных коррекции в первом варианте выполнения формирует весовой коэффициент K44(j) данных коррекции и весовой коэффициент K3(j) данных распознавания для каждой строки La распознавания в соответствии со значением d41(j) оценки наличия/отсутствия структуры для строки La распознавания.
В противоположность этому, блок 421b формирования весовых коэффициентов в блоке 42b обновления данных коррекции формирует весовой коэффициент K44(i) данных коррекции и весовой коэффициент K3(i) данных распознавания для каждого элемента 11 распознавания в соответствии со значением d41(i) оценки наличия/отсутствия структуры для элемента 11 распознавания.
Блок 422 вычисления данных коррекции в первом варианте выполнения выполняет вычисление с использованием весовых коэффициентов K44(j), K3(j), сформированных для каждой строки La распознавания. В вышеупомянутом вычислении данные d44(i) коррекции взвешивают весовым коэффициентом K44(i), данные d3(i) распознавания взвешивают весовым коэффициентом K3(j) и получают сумму этих взвешенных данных.
В противоположность этому, блок 422b вычисления данных коррекции выполняет вычисление с использованием весовых коэффициентов K44(i), K3(i), сформированных для каждого элемента 11 распознавания. Отличие от первого варианта выполнения состоит в том, что весовые коэффициенты K44(i), K3(i) различны для каждого элемента 11 распознавания. Однако вычисление с использованием весовых коэффициентов K44(i), K3(i) является тем же, что и в первом варианте выполнения. Обновленные данные d42(i) коррекции получают посредством вычисления, выполняемого в блоке 422b вычисления данных коррекции.
Поскольку блок 42b обновления данных коррекции определяет весовые коэффициенты K3, K44 для каждого элемента 11 распознавания, когда компоненты сигнала, соответствующие магнитной структуре, получают только из области в одной части строки La распознавания, могут использоваться различные способы обновления данных коррекции в области, из которой получают компоненты сигнала, соответствующие магнитной структуре, и в других областях.
Когда область, из которой получают компоненты сигнала, соответствующие магнитной структуре, занимает только часть строки La распознавания, решение, принимаемое для каждой строки La распознавания, обнаружит невысокий уровень включения компонентов сигнала, соответствующих магнитной структуре, в этой строке La распознавания. В этом случае данные коррекции будут обновлены с присвоением большого веса данным коррекции.
Однако такое обновление будет некорректным для частей, которые включают в себя большую величину компонентов сигнала, соответствующих магнитной структуре.
Это будет пояснено с использованием Фиг. 2. Например, область MG3, имеющая магнитную структуру, расположена на строке La распознавания на бумажном денежном знаке 13. Однако часть строки La распознавания, занятая областью MG3, мала.
Таким образом, когда наличие/отсутствие структуры оценивается способом по первому варианту выполнения, не будет принято решение, что магнитная структура присутствует (больше TH2). В результате не будет выполнена надлежащая обработка для области MG3, которая имеет магнитную структуру. Область MG3 является частью, в которой включена большая величина компонентов сигнала.
В противоположность этому, в третьем варианте выполнения наличие или отсутствие компонентов структуры определяется для каждого элемента 11 распознавания. Соответственно, если степень включения компонентов сигнала, соответствующих магнитной структуре, высока, элементы 11 распознавания в части, соответствующей области MG3, будут обрабатываться, исходя из предположения о том, что магнитная структура имеется. Элементы 11 распознавания, отличные от тех, что расположены в части, соответствующей области MG3, будут обрабатываться, исходя из предположения, что магнитная структура отсутствует.
Соответственно, в месте (область MG3), где имеется магнитная структура, обновленные данные d42(i) коррекции будут иметь значение, близкое к данным d44(i) коррекции, определенным на основании данных d3(i) распознавания в предыдущих строках La распознавания.
В местах (областях, отличных от области MG3), где магнитная структура отсутствует, обновленные данные d42(i) коррекции будут иметь значение, близкое к данным d3(i) распознавания.
Данные d4(i) со скорректированным компонентом постоянного тока получают путем вычитания обновленных данных d42(i) коррекции, полученных таким образом, из данных d3(i) распознавания.
Из вышесказанного следует, что в местах (в области MG3), где имеется магнитная структура, устройство 110 считывания информации согласно третьему варианту выполнения не потеряет компоненты сигнала, соответствующие магнитной структуре. В местах (в областях, отличных от области MG3), где магнитная структура отсутствует, устройство 110 считывания информации получает скорректированные данные d4(i) распознавания, которые выровнены на уровне целевого значения TGT.
Во втором и третьем вариантах выполнения части, отличные от описанных выше, могут иметь ту же конфигурацию, что и в первом варианте выполнения.
В интервалах недействительного распознавания магнитной структуры в вариантах выполнения с первого по третий определяются весовые коэффициенты K3, K44 на основании внешнего сигнала, т.е. сигнала d2 разрешения распознавания. Однако весовые коэффициенты K3, K44 могут быть определены на основании данных d44(i) коррекции и данных d3(i) распознавания также и в интервалах недействительного распознавания магнитной структуры.
В первом варианте выполнения бумажный денежный знак 13 был описан как перемещаемый транспортерной лентой 14. Однако вместо транспортерной ленты 14 перемещаться может линейный датчик 12. То есть достаточно создать относительное перемещение между распознаваемым объектом и линейным датчиком 12 и обеспечить средство для создания относительного перемещения.
Это также применимо ко второму и третьему вариантам выполнения.
Каждый из вышеприведенных вариантов выполнения был описан для случая, когда распознаваемые объекты представляли собой бумажные денежные знаки. Однако настоящее изобретение также применимо к случаям, когда распознаваемые объекты являются бумажными банкнотами, отличными от бумажных денежных знаков.Бумажные банкноты не ограничены бумажным материалом в той степени, в которой они имеют форму, аналогичную бумажным банкнотам.
Также настоящее изобретение было описано для случая, в котором оно используется в устройстве для распознавания магнитной структуры. Однако настоящее изобретение также применимо к устройству для распознавания структур изображений, отличных от магнитных структур. Структуры изображений не ограничены структурами изображений в той степени, в которой они являются структурами, аналогичными структурам изображений. Например, настоящее изображение также применимо в устройстве распознавания изображений, имеющем множество светоприемных элементов.
Изобретение было описано выше в виде устройства считывания информации, но устройство обработки сигналов, составляющее часть устройства считывания информации, и способы обработки сигналов, выполняемые устройством обработки сигналов, также составляют часть изобретения.
Выше были описаны варианты выполнения изобретения, но изобретение не ограничено этими вариантами выполнения.
Условные обозначения
1 - блок распознавания структуры, 2 - блок формирования разрешения распознавания, 3 - блок А/Ц преобразования, 4, 4b - блок коррекции компонента постоянного тока, 5 - блок обработки сигнала, 6 - блок управления системой, 11 - магнитный датчик, 12 - линейный датчик, 13 - бумажный денежный знак, 21 - детектор бумажных денежных знаков, 41, 41b - блок формирования значения оценки наличия/отсутствия структуры, 42, 42b - блок обновления данных коррекции, 43, 43b - блок вычитания данных коррекции, 44 - линейная память данных коррекции, 421, 421b - блок формирования весовых коэффициентов, 422, 422b - блок вычисления данных коррекции, 423 - блок задания параметров.
Устройство управления ходом электромоторного вагона
Внутренний блок кондиционера воздуха и кондиционер воздуха
Система связи, терминальное устройство оптической линии на стороне станции, терминальное устройство оптической линии на стороне пользователя, устройство управления и способ связи
Система мобильной связи
Устройство преобразования мощности для транспортного средства
Двухступенчатый ротационный компрессор
Кодер изображения и декодер изображения, способ кодирования изображения и способ декодирования изображения
Устройство управления силовой установкой
Устройство управления информацией для пассажиров и способ обеспечения видеоданных для устройства управления информацией для пассажиров
Кодер изображения и декодер изображения, способ кодирования изображения и способ декодирования изображения
Устройство управления ходом электромоторного вагона
Преобразователь электрической энергии электрического железнодорожного подвижного состава
Внутренний блок кондиционера воздуха и кондиционер воздуха
Система связи, терминальное устройство оптической линии на стороне станции, терминальное устройство оптической линии на стороне пользователя, устройство управления и способ связи
Система мобильной связи
Устройство преобразования мощности для транспортного средства
Двухступенчатый ротационный компрессор
Кодер изображения и декодер изображения, способ кодирования изображения и способ декодирования изображения
Устройство управления силовой установкой
Устройство управления информацией для пассажиров и способ обеспечения видеоданных для устройства управления информацией для пассажиров

