Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ
Вид РИД
Изобретение
Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для обеспечения безопасности полета группы ЛА, выполняющих совместные действия в сложных навигационных условиях, в том числе при плохой видимости.
Известные способы определения относительного положения ЛА предполагают определение положения каждого из группы ЛА по крайней мере одним из навигационных способов и передачу данных о положении через каналы информационного обмена между всеми ЛА и, дополнительно, радиолокационным способом путем излучения и приема зондирующих сигналов каждым ЛА с целью определения положения соседнего ЛА [1-5]. Необходимость дополнительного определения положения объясняется недостаточной точностью и надежностью определения относительного положения навигационным способом.
В упомянутых патентах для повышения точности навигационного способа определения относительного положения используется спутниковая навигационная система и передача данных о положении между ЛА и, дополнительно, из-за низкой надежности спутниковых данных, определение относительного положения соседних ЛА с помощью датчика относительного положения, построенного, например, на радиолокационном способе.
В патенте [1] в качестве такого датчика используется радиолокационная станция межсамолетной навигации РЛС-МСН, в [2] выполняется измерение интенсивности высокочастотного сигнала, передаваемого соседним ЛА, в [3] и [4] используется миллиметровый радар, а в [5] - дальномерная система.
Если бы спутниковая навигационная система и передача данных обладали достаточной надежностью, требуемой для управления ЛА, дополнительные датчики относительного положения не потребовались. Существующие навигационные спутниковые системы GPS и ГЛОНАСС имеют вероятность выдачи ошибочных данных 10-4 в час [6], что не удовлетворяет требованиям безопасности полета ЛА. По этой причине в существующих способах относительной навигации и управления полетом группы ЛА используют дополнительные системы определения относительного положения.
Наиболее распространенным предложением в патентах [1-4] является использование радиолокационного способа, позволяющего определить дальность и угловое положение соседних ЛА. При использовании первичного радиолокационного способа для измерения положения используется отраженный сигнал, поэтому измерения дальности и углов выполняются для «блестящей» точки отражения радиосигнала на корпусе ЛА. Так как эта точка беспорядочно перемещается по корпусу ЛА при его маневре, возникают случайные ошибки измерения, влияние которых особенно существенно при малых дальностях между ЛА в группе. Кроме того, точность измерения углового положения соседних ЛА зависит от расстояния. Если, например, ширина диаграммы направленности антенны равна 3 град., а размер корпуса соседнего ЛА равен 20 м, то на расстояниях меньше 400 м угловой размер корпуса превысит ширину диаграммы направленности и угловое положение будет измеряться с большими ошибками. Другим недостатком традиционного способа первичной локации (радио, тепловой, оптической) по отраженному от цели сигналу является отсутствие опознавания цели.
Для опознавания цели в авиационной практике управления воздушным движением находит применение способ вторичной радиолокации, при котором на ЛА устанавливаются ответчики радиолокационных сигналов, передающие, кроме ответного дальномерного сигнала, также информационный сигнал [7]. Использование ответчиков также повышает точность и надежность радиолокационного способа. В указанных аналогах, применяющих радиолокационный способ, задача опознавания радиолокационной цели не рассматривается и формируется лишь сигнал о приближении соседнего ЛА без определения его номера. Таким образом, подобные способы определения относительного положения практически пригодны только для группы из двух ЛА.
Существенным недостатком радиолокационного способа является сложность реализации. Например, в [3] для обзора пространства вокруг ЛА предлагается применить шесть локаторов. Более простым в реализации является дальномерный метод [5] с использованием ответчиков, который решает задачу измерения дальности между ЛА и задачу опознавания. Для реализации этого способа не требуется использовать узконаправленные антенны, но недостатком дальномерного способа является отсутствие информации об угловом положении соседних ЛА.
Способ-прототип [3] состоит в том, что предлагается способ определения относительного положения ЛА при межсамолетной навигации, предусматривающий для каждого ЛА определение относительного положения соседних ЛА по отношению к данному ЛА первым и вторым способами, совместную комплексную обработку информации об относительном положении ЛА, полученной первым и вторым способами, при этом первый способ предусматривает определение навигационной информации каждым ЛА, передачу и прием ее через каналы информационного обмена ЛА, а второй способ предусматривает определение радиолокационной информации путем передачи и приема зондирующих сигналов каждым ЛА через приемоизлучающую антенну для определения относительных координат соседних ЛА.
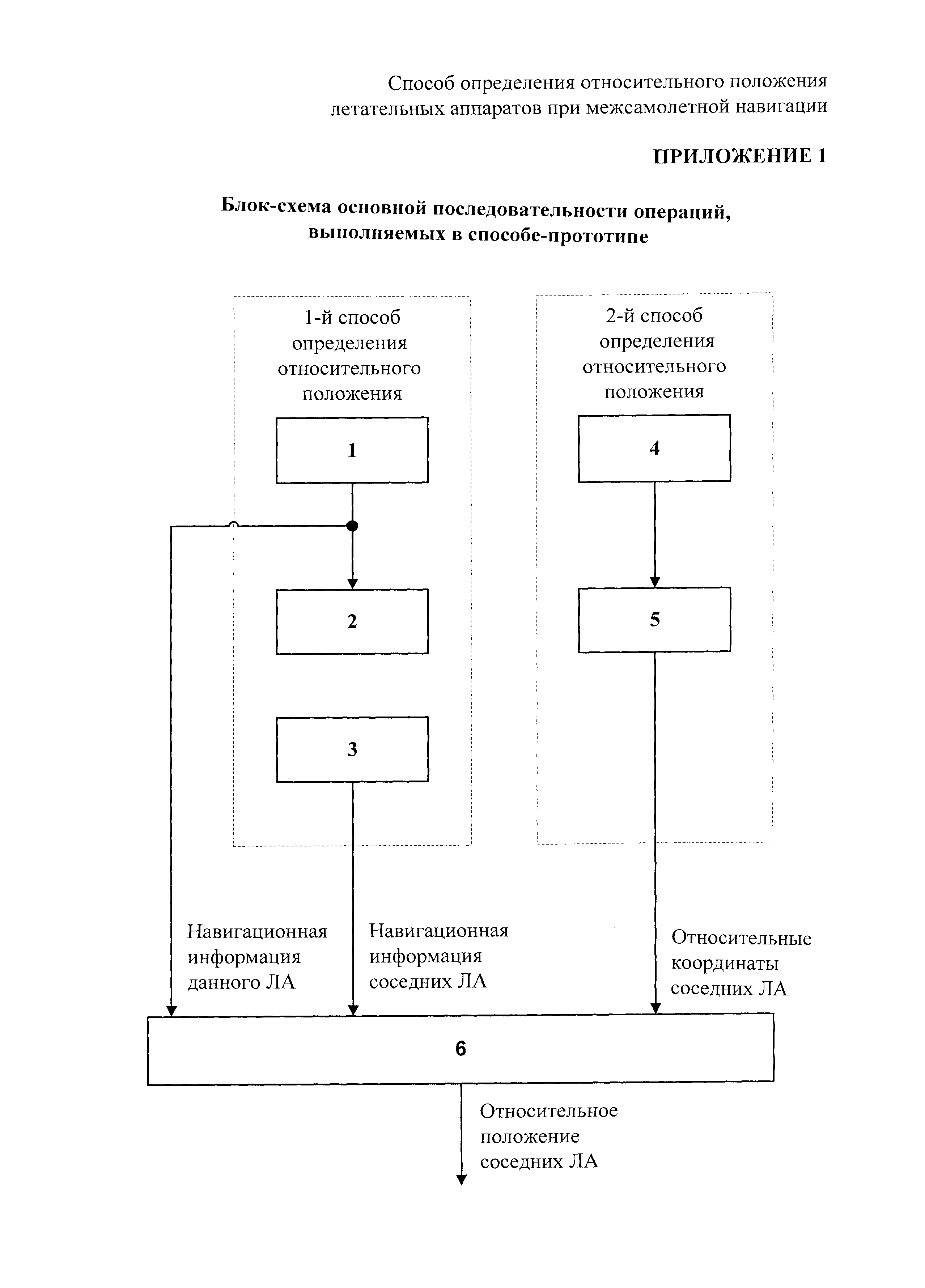
Блок-схема последовательности действий по способу-прототипу и расшифровка обозначений приведены в Приложениях 1 и 2.
Общим недостатком прототипа и аналогов изобретения является низкая точность и надежность дополнительных способов определения относительного положения. Точность и надежность измерений можно повысить, если использовать метод вторичной локации с ответчиком. Такой способ измерения дальности применяется также в дальномерной системе [5]. Однако при использовании ответчика невозможно создать всенаправленную антенну, и на ЛА устанавливают систему из нескольких антенн. В связи с тем, что измерение дальности осуществляется между антеннами запросчика и ответчика, возникает неопределенность в измерениях дальности в том случае, если используется несколько антенн, установленных в различных частях ЛА. Эта неопределенность несущественна, если погрешность дальномера намного больше размеров ЛА. Например, при использовании стандартного дальномера DME [7] погрешность на малых дальностях превышает 200 м, что существенно больше размеров ЛА. Такая высокая погрешность объясняется малой шириной спектра сигналов DME, но если для измерений использовать широкополосный сигнал, погрешность дальномерных измерений снижается до единиц метров, и при определении дальности до ЛА необходимо учитывать положение антенн на корпусе ЛА. В существующих аналогах положение антенн на корпусе ЛА не учитывается.
Задачей заявляемого способа является повышение точности и надежности определения относительного положения ЛА на малых дальностях. Поставленная задача решается следующим образом.
Предлагается способ определения относительного положения ЛА при межсамолетной навигации, предусматривающий для каждого ЛА определение относительного положения соседних ЛА по отношению к данному ЛА первым и вторым способами, совместную комплексную обработку информации об относительном положении ЛА, полученной первым и вторым способами, при этом первый способ предусматривает определение навигационной информации каждым ЛА, передачу и прием ее через каналы информационного обмена ЛА, а второй способ предусматривает определение радиолокационной информации путем передачи и приема зондирующих сигналов каждым ЛА через приемоизлучающую антенну и определение относительных координат соседних ЛА,
при этом в первом способе определения относительного положения соседних ЛА по отношению к данному ЛА дополнительно определяют углы ориентации данного ЛА, а во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА формируют, исходя из навигационной информации, вектор положения приемоизлучающей антенны для каждого ЛА в локальной системе координат (ЛСК) с учетом упомянутых углов ориентации, передают в общем информационном пакете данного ЛА сообщение о координатах упомянутого вектора положения антенны другим ЛА, выполняют прием упомянутых сообщений соседних ЛА, вычисляют разности векторов положения приемоизлучающих антенн данного и соседних ЛА, с помощью которых вычисляют уточненные относительные координаты соседних ЛА, и используют упомянутые уточненные относительные координаты в комплексной обработке информации об относительном положении ЛА для формирования уточненного относительного положения соседних ЛА по отношению к данному ЛА, при этом погрешность второго способа определения относительного положения ЛА зависит от величин модулей векторов положения антенн данного и соседнего ЛА и должна соответствовать неравенству:

где σ2 - погрешность второго способа определения относительного положения ЛА; |V1| и |V2| - модули векторов положения антенн данного и соседнего ЛА.
Предлагается вариант способа, в котором на каждом ЛА формируют базу данных, содержащую векторы положения приемоизлучающих антенн в связанной с ЛА системе координат (ССК), затем с помощью навигационной информации выполняют преобразование вектора положения используемой в данный момент времени приемоизлучающей антенны в ЛСК и передают координаты упомянутого вектора положения соседним ЛА.
Предлагается также вариант способа, в котором во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА для передачи и приема упомянутых зондирующих сигналов применяют метод вторичной радиолокации, при этом используют направленную антенну для передачи запросных сигналов на данном ЛА и всенаправленную антенную систему для формирования ответных сигналов на соседних ЛА.
Предлагается также вариант способа, в котором во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА для передачи и приема упомянутых зондирующих сигналов применяют дальномерный метод, при этом на данном и соседних ЛА используют всенаправленную антенную систему для передачи и приема запросных и ответных сигналов.
Предлагается также вариант способа, в котором во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА для передачи и приема упомянутых зондирующих сигналов применяют псевдодальномерный метод, при этом ответные сигналы не излучаются, а моменты времени излучения зондирующих сигналов всех ЛА согласованы с общей для них временной шкалой, причем для коррекции временной шкалы каждого ЛА также применяется упомянутый дальномерный метод.
Суть заявляемого способа поясняется с помощью Фиг. 1, 2, 3 и 4.
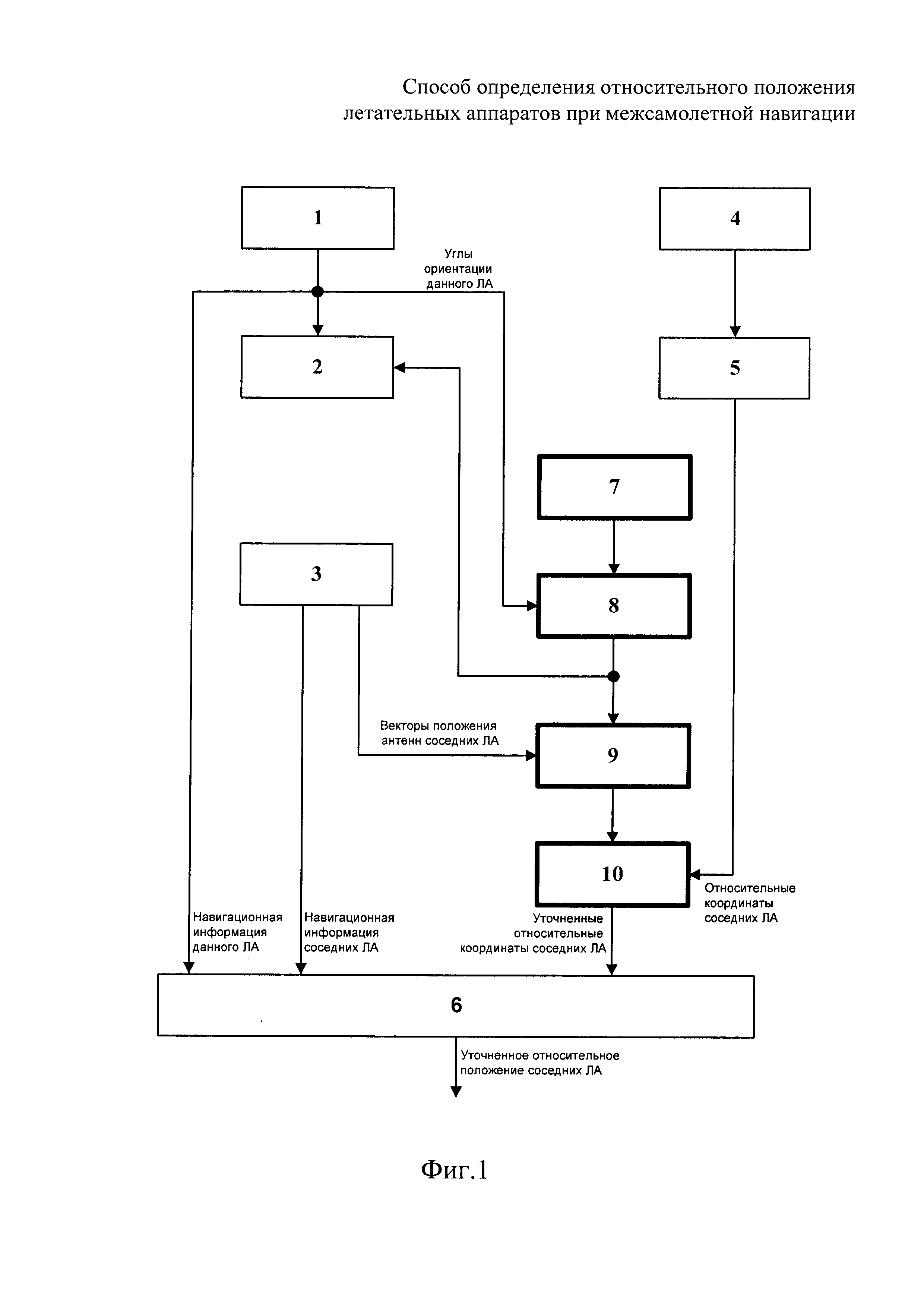
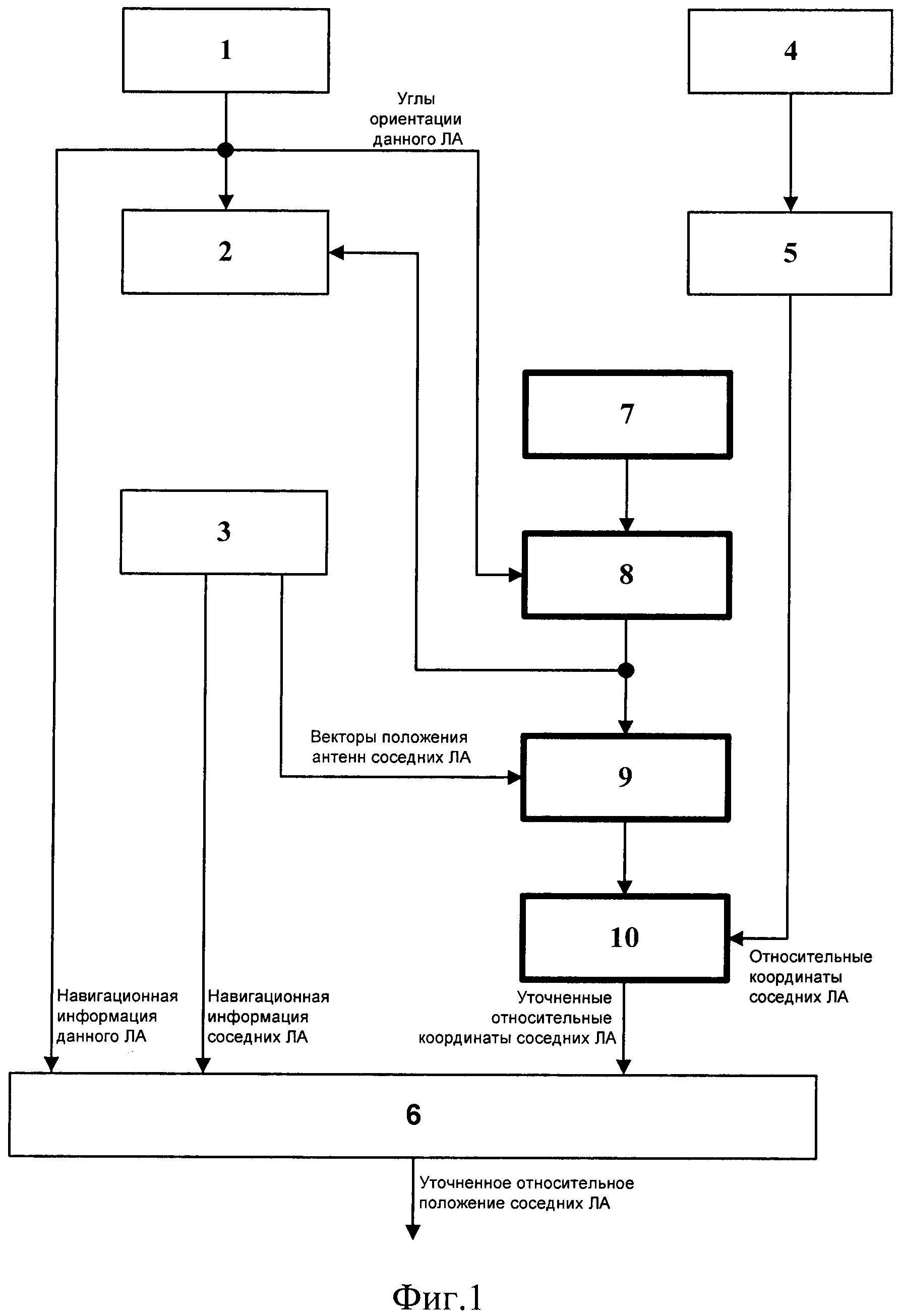
На Фиг. 1 представлена блок-схема основной последовательности операций предложенного способа определения относительного положения ЛА. Операции, используемые в способе-прототипе, выделены прямоугольниками с тонкими линиями, вновь предложенные операции выделены прямоугольниками с толстыми линиями.
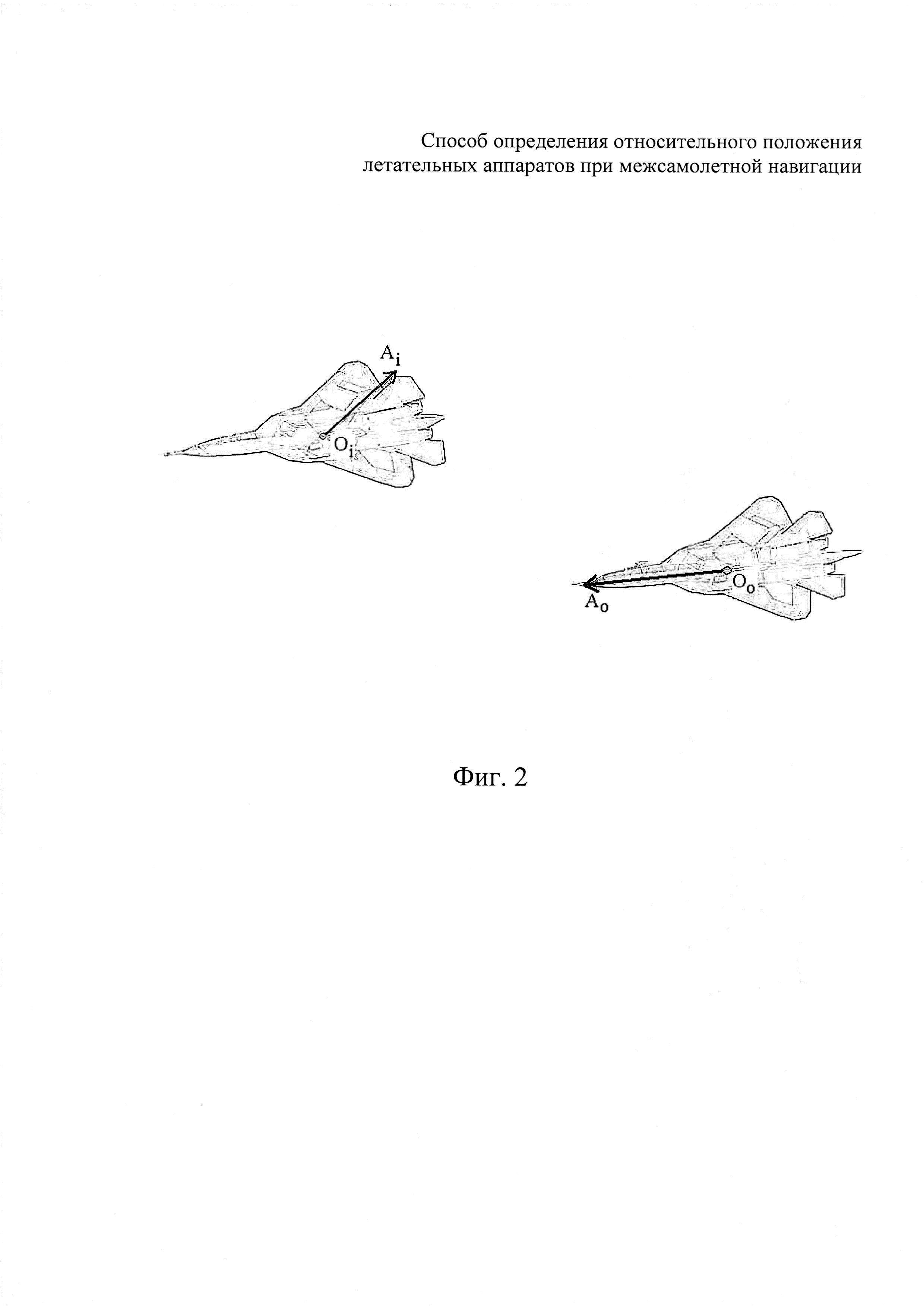
На Фиг. 2 приведен пример расположения антенн на ЛА.
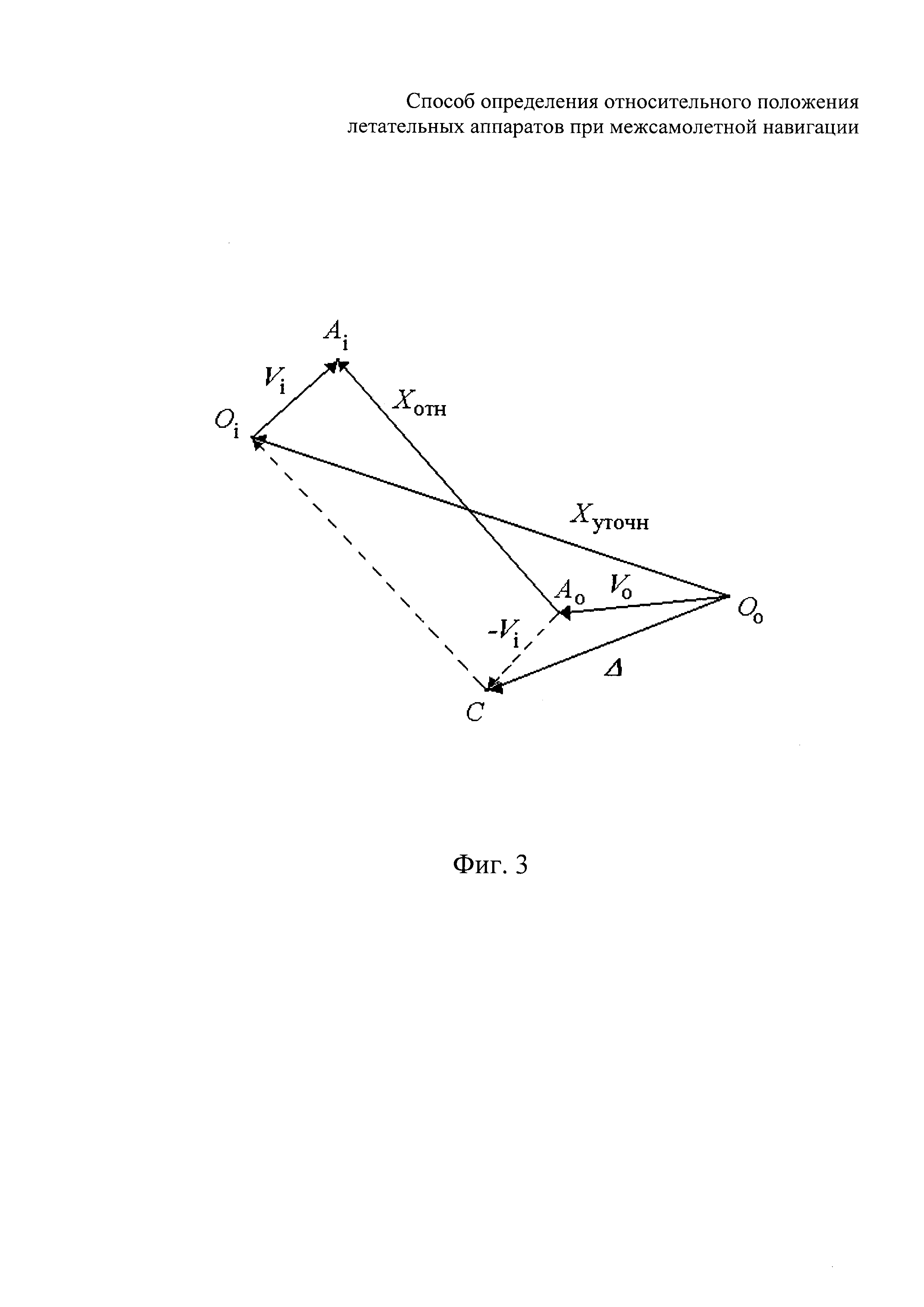
На Фиг. 3 дано векторное представление задачи определения относительного положения центра масс соседнего ЛА методом вторичной радиолокации.
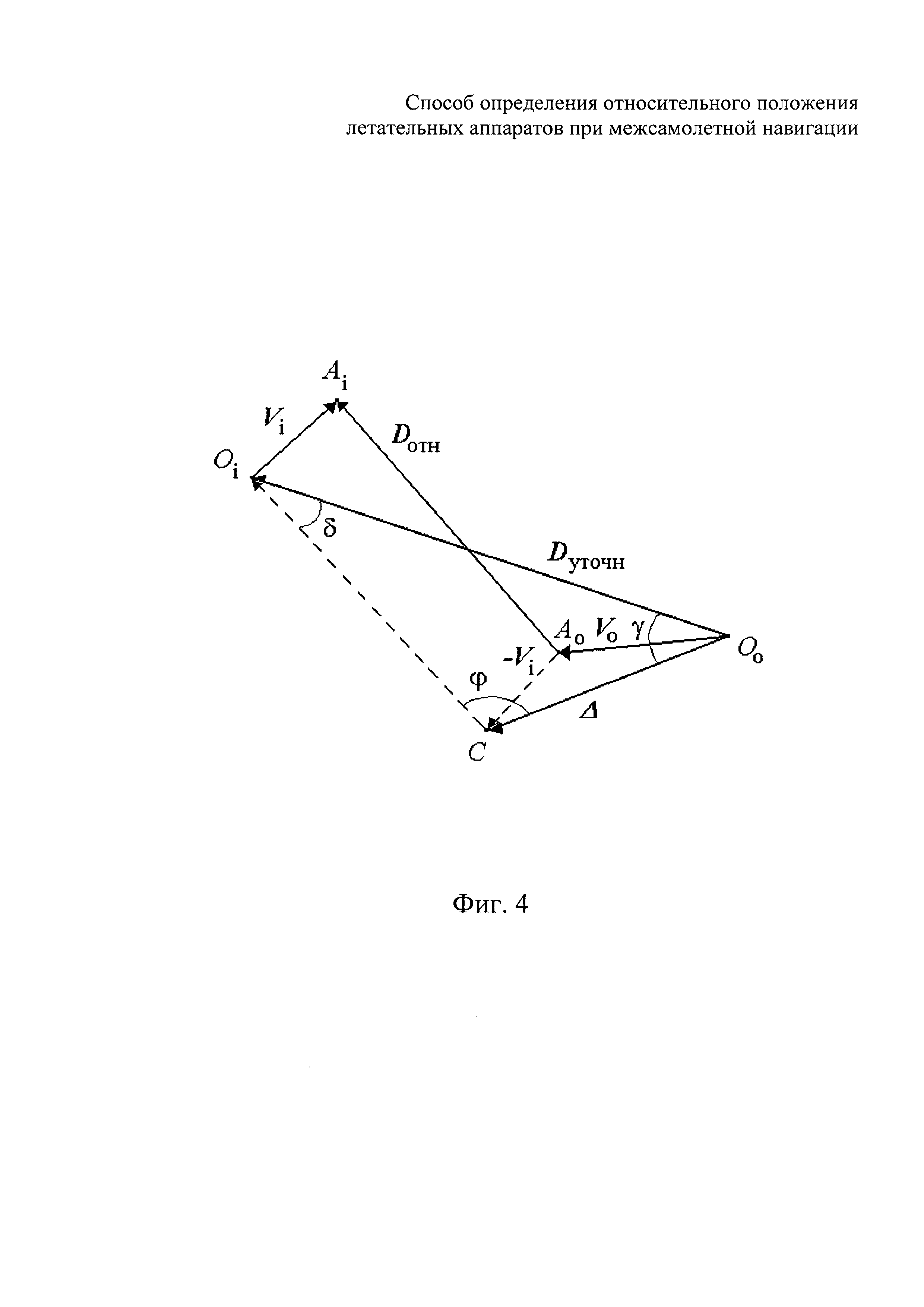
На Фиг. 4 дано векторное представление задачи определения относительного положения центра масс соседнего ЛА дальномерным методом.
В приложении 1 раскрыта блок-схема основной последовательности операций, выполняемых в способе-прототипе.
В приложении 2 приведена расшифровка обозначений, используемых на Фиг. 1 и на блок-схеме основной последовательности операций, выполняемых в способе-прототипе.
Способ согласно Фиг. 1 и Приложению 1 включает характерные для способа-прототипа действия: определение навигационной информации данного ЛА 1, передача навигационной информации соседним ЛА 2, прием навигационной информации соседних ЛА 3, определение радиолокационной информации путем передачи и приема зондирующих сигналов 4, определение относительных координат соседних ЛА 5, комплексная обработка информации об относительном положении ЛА 6. Операции 1-3 составляют 1-й способ определения относительного положения, а операции 4 и 5 составляют 2-й способ.
Предложены новые действия, реализующие заявленный способ. Новизна способа согласно Фиг. 1 состоит в том, что в процессе определения навигационной информации данного ЛА 1 выполняется формирование не только навигационной информации данного ЛА, например координат, как в прототипе, но и формирование углов ориентации данного ЛА, которые, совместно с информацией о координатах приемоизлучающих антенн данного ЛА в ССК, хранящейся в базе данных 8, используются для формирования вектора положения приемоизлучающей антенны в ЛСК для данного ЛА 7. При этом координаты положения приемоизлучающей антенны данного ЛА в ЛСК включаются в навигационную информацию для передачи соседним ЛА 2. Далее, информация о положении приемоизлучающих антенн данного ЛА и соседних ЛА, полученная при приеме навигационной информации соседних ЛА 3, используется для вычисления разности векторов положения приемоизлучающих антенн данного и соседних ЛА 9, после чего вычисляются уточненные относительные координаты соседних ЛА 10, которые, совместно с навигационной информацией (координатами) данного и соседних ЛА, используются в комплексной обработке информации об относительном положении ЛА 6 для формирования уточненного относительного положения соседних ЛА.
Работа заявляемого способа происходит следующим образом. Действия 1, 4, 5 и 6 выполняются полностью аналогично прототипу. Действия 2 и 3 отличаются добавлением в общий пакет навигационной информации данных о векторе положения приемоизлучающей (рабочей) антенны, при этом осуществляется кодирование и декодирование упомянутых данных.
Определение навигационной информации данного ЛА 1 включает в себя, помимо определения пространственных координат ЛА (например, с помощью спутниковой навигационной системы), еще и определение углов ориентации ЛА (например, с помощью инерциальной навигационной системы). Определение относительных координат соседних ЛА 5 с использованием радиолокационной информации, получаемой путем передачи и приема зондирующих сигналов 4, может осуществляться с помощью радиолокационного способа [3, 4], дальномерного способа [5] и других способов. Комплексная обработка информации об относительном положении ЛА 6 обычно строится на базе алгоритма калмановской фильтрации [9]. В простейшем варианте осуществляется весовое суммирование двух оценок относительных координат соседних ЛА: оценки, полученной первым способом в результате вычитания из принятых в навигационном сообщении пространственных координат соседних ЛА 3 пространственных координат данного ЛА 1, и оценки, полученной вторым способом 5.
Определение относительных координат соседних ЛА в случае использования нескольких приемоизлучающих антенн, установленных в различных частях ЛА, выполняется следующим образом. Допустим, приемоизлучающая антенна данного ЛА А0 установлена в носовой части, а на соседнем ЛА (Ai) - на хвостовом стабилизаторе (Фиг. 2). На каждом ЛА по угловой ориентации (действие 1) и информации о координатах приемоизлучающих антенн данного ЛА в ССК, хранящейся в базе данных векторов положения приемоизлучающих антенн в ССК для данного ЛА 7, формируют вектор положения приемоизлучающей (рабочей) антенны в ЛСК 8. Координаты этого вектора кодируют и формируют общий пакет навигационной информации, включающий в себя пространственные координаты ЛА и координаты вектора положения упомянутой антенны в ЛСК. При этом пространственные координаты ЛА определяются в единой для группы ЛА ЛСК с началом в заданной точке, а координаты вектора положения приемоизлучающей антенны - в ЛСК с началом в центре масс ЛА (точки О0 и Oi на Фиг. 2). Сформированный общий пакет навигационной информации далее по каналу информационного обмена передается всем соседним ЛА 2, где выполняется прием и декодирование пакета навигационной информации 3. В результате этих операций на борту каждого ЛА имеется возможность вычисления разности векторов положения антенн данного и соседнего ЛА 9 с последующим вычислением уточненных относительных координат соседних ЛА 10, причем алгоритм такого вычисления зависит от способа определения относительных координат соседних ЛА 5.
Предложенные действия целесообразно использовать в случае достаточно высокой точности второго способа определения относительного положения ЛА. Погрешность второго способа зависит от величин модулей векторов положения антенн данного и соседнего ЛА; при высокой точности она должна соответствовать неравенству (1). Если указанное неравенство не выполняется, учитывать положение приемоизлучающих антенн на ЛА нецелесообразно.
Ниже рассмотрены варианты, развивающие и уточняющие предложенный способ.
Предлагается вариант способа, в котором для формирования вектора положения приемоизлучающей антенны в ЛСК на каждом ЛА формируют базу данных, содержащую векторы положения приемоизлучающих антенн в ССК (начало ССК - в центре масс ЛА), затем с помощью навигационной информации выполняют преобразование вектора положения используемой в данный момент времени приемоизлучающей антенны в локальную систему координат и передают координаты упомянутого вектора положения соседним ЛА. Преобразование упомянутого вектора положения используемой в данный момент времени (рабочей) приемоизлучающей антенны в ЛСК (т.е. поворот системы координат [8]) выполняют с использованием информации об угловой ориентации ЛА, включающей в себя углы крена, тангажа и рысканья ЛА (действие 1 на Фиг. 1). Например, при глубокой интеграции бесплатформенной инерциальной навигационной системы (БИНС) и спутниковой радионавигационной системы (СРНС) для поворота системы координат целесообразно использовать косинусную матрицу или кватернион преобразования, формируемые в БИНС [9].
Предлагается вариант способа, где вычисление уточненных относительных координат соседнего ЛА при использовании радиолокационного способа измерения выполняется следующим образом: во втором (радиолокационном) способе определения относительного положения соседних ЛА по отношению к данному ЛА для передачи и приема упомянутых зондирующих сигналов применяют метод вторичной радиолокации, при этом используют направленную антенну для передачи запросных сигналов на данном ЛА и всенаправленную антенную систему для формирования ответных сигналов на соседних ЛА. Центры масс данного и соседнего ЛА расположены в точках Oo и Oi, соответственно, а антенны для передачи и приема зондирующего и ответного сигналов расположены в точках Ao (данный ЛА) и Ai (соседний ЛА) (см. Фиг. 2 и 3).
Радиолокационный способ позволяет измерить вектор относительного положения Хотн, расположенный на Фиг. 3 между антеннами Ao и Ai. Чтобы определить уточненный вектор положения Хуточн, связывающий центры масс данного и соседнего ЛА, смещаем вектор Хотн так, что его начало оказывается в точке С, а конец - в точке Oi (Фиг. 3).
Рассмотрим треугольник OoCAo. Сторона OoAo образована вектором положения антенны относительно центра масс данного ЛА, сторона AoC - вектором положения антенны соседнего ЛА с обратным знаком: -Vi, а сторона OoC является разностью векторов Δ, определяемой выражением:

Вектор уточненного положения Хуточн определяется из треугольника OoOiC как сумма векторов Хотн (сторона COi) и А (сторона OoC):

Для вычисления вектора (2) необходимо представить векторы Vo и Vi в виде:  ,
,  тогда
тогда
Это выражение описывает действие 9 (Фиг. 1), причем для реализации этого действия необходимо формировать, передавать и принимать данные вектора Vi соседнего ЛА (действия 8, 2, 3 на Фиг. 1).
При вычислении выражения (3) радиолокационное измерение, содержащее дальность d, азимут α и угол места β преобразуется в вектор Хотн в виде 
Тогда уточненное значение вектора относительного положения Хуточн определяется выражением

Это выражение описывает действие 10 на Фиг. 1 для метода вторичной радиолокации.
Во всех расчетах предполагается, что ось х направлена на Север (угол азимута измеряется от направления на Север), ось y - на Восток, а ось z - вниз. Поэтому знак последнего элемента вектора Хотн в выражении (5) инвертирован.
Предлагается вариант способа для вычисления уточненных относительных координат соседнего ЛА, при котором во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА для передачи и приема упомянутых зондирующих сигналов применяют дальномерный метод, при этом на данном и соседних ЛА используют всенаправленную антенную систему для передачи и приема запросных и ответных сигналов.
Дальномерный способ позволяет измерить только расстояние между антеннами Ao и Ai, т.е. относительную дальность Dотн (Фиг. 4). При этом требуется определить расстояние между центрами масс данного и соседнего ЛА, которые расположены в точках Oo и Oi, т.е. требуется найти Dуточн.
В данном случае угловая информация не определяется, однако для точки Oi определяются относительные координаты [xотн yотн zотн] путем вычитания из координат соседнего ЛА координат данного ЛА, полученных первым (навигационным) способом (действия 1-3 прототипа, Приложение 1). Затем можно определить направляющие косинусы отрезка OoOi (вектора Dуточн):

Далее строится треугольник AoOoC и определяется вектор Δ (отрезок OoC):
его модуль:  и его направляющие косинусы:
и его направляющие косинусы:

Выражения (6)-(7) описывают действие 9 (Фиг. 1).
Используя направляющие косинусы (6) и (8), вычисляется косинус угла γ между отрезками OoC и OoOi:

Уточненное значение дальности между центрами масс данного и соседнего ЛА Dуточн определяется как неизвестная сторона треугольника COoOi, в котором сторона OiC равна Dотн, сторона OoC равна  и угол γ определяется выражением (9).
и угол γ определяется выражением (9).
Если  (расстояние между ЛА всегда превышает их размеры), решаемая задача имеет единственное решение.
(расстояние между ЛА всегда превышает их размеры), решаемая задача имеет единственное решение.
С помощью теоремы синусов [8] определим угол δ:
Затем определим угол δ и угол ϕ из выражения ϕ=π-δ-γ. Тогда уточненное значение дальности равно

Это выражение описывает действие 10 (Фиг. 1) для дальномерного метода.
Предлагается вариант способа, в котором во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА для передачи и приема упомянутых зондирующих сигналов применяют псевдодальномерный метод. При этом ответные сигналы не излучаются, а моменты времени излучения зондирующих сигналов всех ЛА согласованы с общей для них временной шкалой, причем для коррекции временной шкалы каждого ЛА также применяется упомянутый дальномерный метод.
Псевдодальномерный способ позволяет измерить относительные дальности Dотн (Фиг. 4) с дополнительной погрешностью, обусловленной сдвигом временных шкал ЛА. Эта погрешность на каждом ЛА должна быть скомпенсирована с помощью оценки сдвига временной шкалы, формируемой при определении навигационной информации 1 (например, с помощью спутниковой навигационной системы). Если точность такой оценки сдвига временной шкалы недостаточна, то возможно периодическое применение дальномерного метода, позволяющего снизить дополнительную погрешностью до уровня одного метра. После компенсации сдвига временных шкал, относительные дальности Dотн используются для вычисления уточненных относительных координат соседних ЛА 10 аналогично описанным ранее действиям (в соответствии с выражениями (6)-(10)).
Комплексная обработка информации об относительном положении ЛА (6 на Фиг. 1) для формирования уточненного относительного положения соседних ЛА по отношению к данному ЛА выполняется следующим образом.
В первом способе определения относительного положения определяются координаты данного ЛА X1Д (действие 1) и соседнего ЛА Х1С (действие 3). При комплексной обработке информации об относительном положении ЛА 6 вычисляется разность  которая представляет собой относительные координаты соседнего ЛА. Во втором способе определения относительного положения определяются относительные координаты соседнего ЛА
которая представляет собой относительные координаты соседнего ЛА. Во втором способе определения относительного положения определяются относительные координаты соседнего ЛА  (действие 5). Кроме того, в обоих способах определяются элементы корреляционных матриц ошибок определения координат: Р1С - корреляционная матрица ошибок определения координат соседнего ЛА первым способом,
(действие 5). Кроме того, в обоих способах определяются элементы корреляционных матриц ошибок определения координат: Р1С - корреляционная матрица ошибок определения координат соседнего ЛА первым способом,  - корреляционная матрица ошибок определения относительных координат соседнего ЛА первым способом,
- корреляционная матрица ошибок определения относительных координат соседнего ЛА первым способом,  - корреляционная матрица ошибок определения относительных координат соседнего ЛА вторым способом
- корреляционная матрица ошибок определения относительных координат соседнего ЛА вторым способом
Объединение навигационной информации, получаемой первым и вторым способами, и определение оптимальной оценки  выполняется с помощью комплексного алгоритма [9]:
выполняется с помощью комплексного алгоритма [9]:

где K - оптимальный коэффициент усиления:

Поскольку  комплексный алгоритм определения оптимальной оценки
комплексный алгоритм определения оптимальной оценки  можно представить также в следующей форме:
можно представить также в следующей форме:

Погрешность определения навигационных параметров ЛА по первому способу навигации характеризуют элементы матрицы  погрешность определения навигационных параметров ЛА по второму способу навигации характеризуют элементы матрицы
погрешность определения навигационных параметров ЛА по второму способу навигации характеризуют элементы матрицы  . В зависимости от погрешностей определения навигационных параметров ЛА в алгоритме комплексной обработки выполняется вычисление весовых коэффициентов (I-K и K), с которыми учитываются оценки координат по первому и второму способам. Корреляционные матрицы могут вычисляться в реальном времени (действия 1 и 5) либо храниться в базе данных. При этом корреляционная матрица ошибок определения относительных координат ЛА с помощью комплексного алгоритма Р равна:
. В зависимости от погрешностей определения навигационных параметров ЛА в алгоритме комплексной обработки выполняется вычисление весовых коэффициентов (I-K и K), с которыми учитываются оценки координат по первому и второму способам. Корреляционные матрицы могут вычисляться в реальном времени (действия 1 и 5) либо храниться в базе данных. При этом корреляционная матрица ошибок определения относительных координат ЛА с помощью комплексного алгоритма Р равна:

В режиме группового полета ЛА первый способ (спутниковой навигации) обеспечивает лучшие точностные характеристики (элементы матрицы K существенно меньше элементов матрицы I-K). Второй способ является альтернативным дополнением и используется в форс-мажорных обстоятельствах (интенсивный маневр ЛА, наличие эффектов радиоинтерференции и пр.). Именно в этих обстоятельствах второй способ позволяет выявить неработоспособность спутникового способа навигации и повысить надежность предложенного способа определения относительного положения ЛА. Если второй способ также обеспечивает высокие точностные характеристики (элементы матрицы K соизмеримы с элементами матрицы I-K), то использование предложенного способа позволяет повысить и точность определения относительного положения соседних ЛА.
Таким образом, в предложенном способе введены новые операции и новые сочетания их с известными операциями, связанные с учетом положения приемоизлучающих антенн на ЛА:
- формирование в радиолокационном способе вектора положения приемоизлучающей антенны в локальной системе координат с учетом данных по ориентации ЛА, формируемых в навигационном способе;
- вычисление разности векторов положения антенн данного и соседних ЛА;
- вычисление уточненных относительных координат ЛА.
При этом существенно, что:
- при формировании вектора положения приемоизлучающей антенны в локальной системе координат учитывается информация о координатах антенн, хранящаяся в базе данных, а также угловая ориентация ЛА;
- для вычисления разности векторов положения антенн данного и соседних ЛА используется канал информационного обмена ЛА;
- вычисление уточненных относительных координат ЛА зависит от второго способа определения относительного положения соседних ЛА, причем варианты его реализации расширяют функциональные возможности предложенного способа.
Указанные действия определяют существенную новизну предложенного способа. Эффективность предложенного способа подтверждена результатами имитационного цифрового и полунатурного моделирования на комплексных стендах при разработке и отладке программного обеспечения бортовых навигационно-посадочных комплексов перспективных ЛА. При этом во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА применен дальномерный метод с использованием сложного фазоманипулированного зондирующего сигнала (погрешность измерения дальности с вероятностью 0,95 составила 1,2 м).
Проведенные летные проверки на двух самолетах типа Су-27 показали техническую целесообразность и эффективность предложенного способа.
Заявляемое изобретение является перспективным для решения проблем повышения надежности и точности систем межсамолетной навигации нового поколения и, в конечном итоге, для снижения вероятности авиационных катастроф.
Таким образом, из вышеприведенного следует новизна и полезность предложенного способа.
Литература
1. Патент RU 2222781, кл. G01C 21/00, G01C 23/00, дата 27.01.2004, «Информационная система межсамолетной навигации».
2. Patent GB 2476149, «Process and automatic control system of the formation of flight of aircraft without pilot».
3. Patent US 7,024,309 B2 кл. G01S 13/93 Apr. 4, 2006 «Autonomous station keeping system for formation flight».
4. Patent US 6,926,233 кл. B64C 13/20, G05D 1/104 Aug. 9, 2005 «Automatic formation flight control system (AFFCS) - a system for automatic formation flight control of vehicles not limited to aircraft, helicopters, or space platforms».
5. Патент RU 2478979 C1, кл. G01S 5/14, дата 11.11.2011, «Дальномерная радиотехническая система ближней навигации летательных аппаратов».
6. Navstar GPS Space Segment/Navigation User interfaces, ICD-GPS-200C // ARINC Research Corporation, 10 October 1993. Режим доступа http://www.arinc.com/gps
7. Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
8. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. М., Наука, 1965.
9. Roger R.M. Applied mathematics in integrated navigation systems. AIAA, 2007.
Дальномерная радиотехническая система ближней навигации летательных аппаратов
Многоцелевая самолетная антенно-фидерная система
Комплексный способ навигации летательных аппаратов
Способ инерциально-спутниковой навигации летательных аппаратов
Комплексный способ навигации летательных аппаратов
Способ определения относительного положения при межсамолетной навигации
Система предупреждения столкновения летательного аппарата с землей
Способ предупреждения столкновения летательного аппарата с землей и устройство на его основе
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы и система посадки на его основе
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы и система посадки на его основе
Дальномерная радиотехническая система ближней навигации летательных аппаратов
Многоцелевая самолетная антенно-фидерная система
Комплексный способ навигации летательных аппаратов
Способ инерциально-спутниковой навигации летательных аппаратов
Комплексный способ навигации летательных аппаратов
Способ определения относительного положения при межсамолетной навигации
Стабилизатор напряжения аппаратуры электропитания посадочного радиолокатора
Способ контроля достоверности данных системы автоматического зависимого наблюдения
Система предупреждения столкновения летательного аппарата с землей
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы и система посадки на его основе

