Результат интеллектуальной деятельности: РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ
Вид РИД
Изобретение
Изобретение относится к устройствам для регулирования и управления, а именно к автоматическим регуляторам, и может быть использовано для управления динамическими объектами в химической промышленности, теплотехнике, приборостроении.
Регуляторы с релейной характеристикой (релейные регуляторы) широко распространены в технике (см., например, Цыпкин Я.З. Релейные автоматические системы. - М.: Наука, 1974). Известны также регуляторы с релейными характеристиками, работающие по принципу «включено-выключено» и имеющие положительный или отрицательный гистерезис (см., например, а.с. СССР №№631864, 1418648, 1585778).
Наиболее близким по технической сути к заявляемому устройству является регулятор с релейной характеристикой по а.с. СССР №1418648. Опубл. в БИ 1988, №31. Регулятор-прототип содержит индикатор экстремумов, нуль-орган, релейный блок, сумматор, два коммутирующих элемента, блок обнаружения отклонений, задатчики уровней выходного сигнала.
Регулятор-прототип является релейным двухпозиционным регулятором с отрицательным переменным гистерезисом и зоной нечувствительности, который работает по принципу «включено-переключено» или «включено-выключено». Величина гистерезиса при этом поставлена в линейную зависимость от амплитуды автоколебаний. Особенность его заключается в том, что переключения регулятора происходят с опережением (с «недоходом») по отношению к сигналам, определяющим границы зоны нечувствительности.
Уравнение регулятора (закон управления, реализованный в регуляторе прототипе) имеет вид

где М(t)=xH+k⋅(xэ(t)-xH)-x(t), если x(t)<хН,
М(t)=xB+k⋅(xэ(t)-xB)-x(t), если x(t)>xB,
хН=х0-с, хВ=х0+с - соответственно величины, определяющие нижнюю и верхнюю границы зоны нечувствительности,
k - постоянный коэффициент, меньший единицы (0≤k<1),
xэ(t) - экстремальные значения регулируемой координаты, равные ее максимуму xмах или минимуму xмin,
х0 - задание (заданное конечное значение регулируемой координаты x(t) (переменной)),
с - половина ширины зоны нечувствительности,
Sign - знаковая функция, равная +1 или -1 в зависимости от знака функции M(t),
В - величина управляющего воздействия («полка» реле),
∨ - знак дизъюнкции.
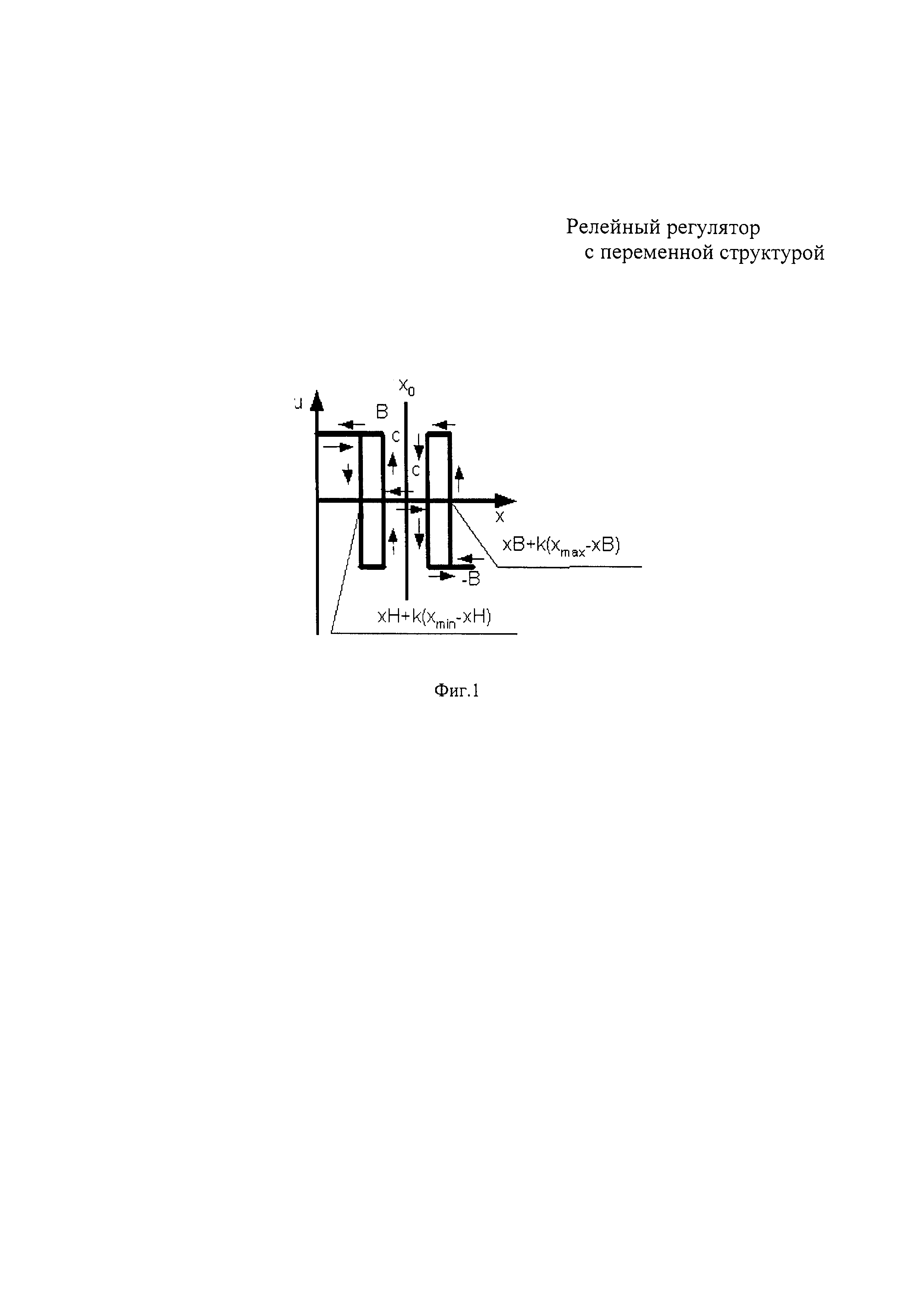
Статическая характеристика регулятора представлена на Фиг. 1.
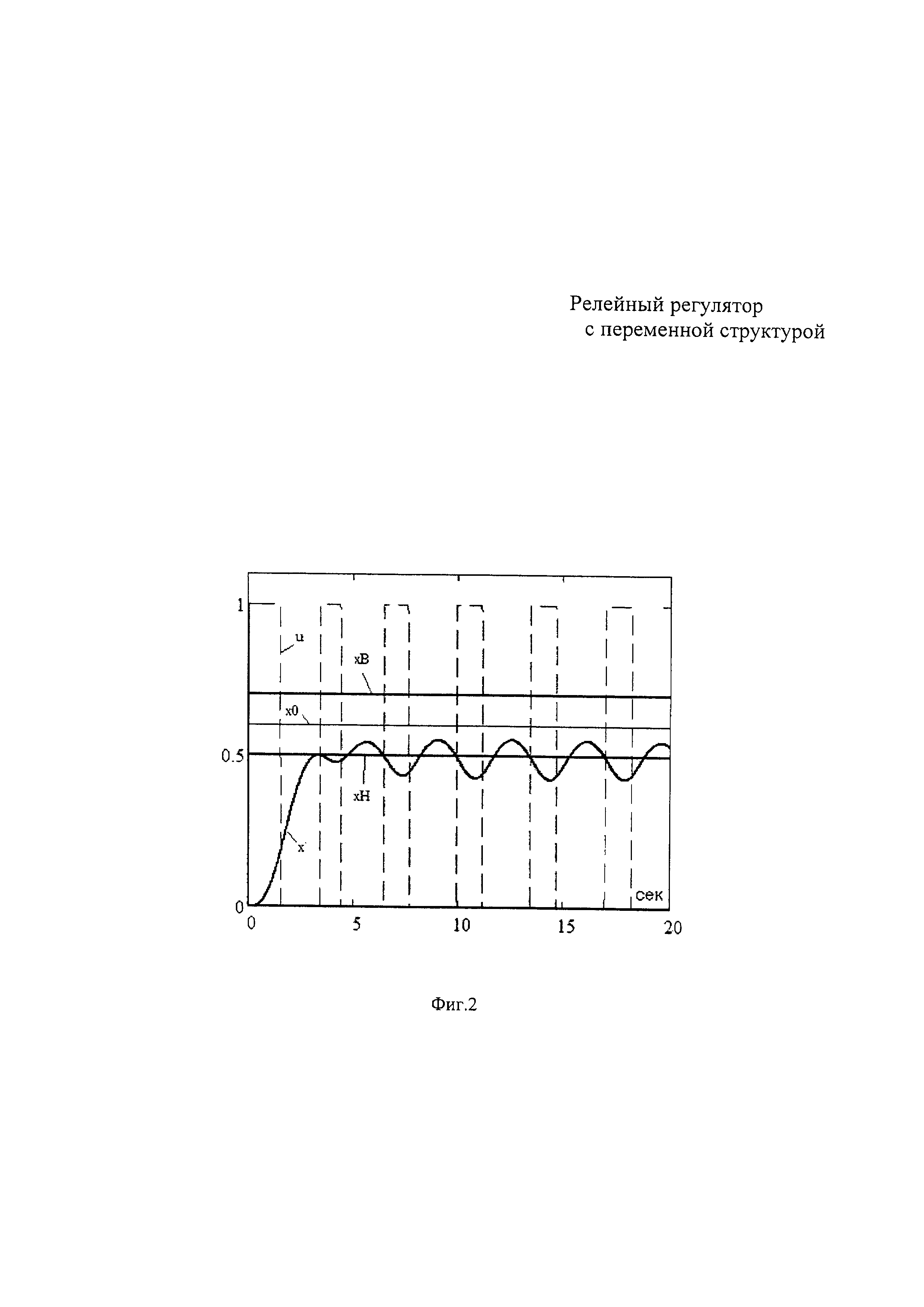
Недостатки регулятора обусловлены сложностями обеспечения точности управления как при управлении астатическими объектами, так и особенно объектами без астатизма в режиме работы регулятора по принципу «включено-выключено», «открыто-закрыто», когда управление становится асимметричным. В результате в системе возникают устойчивые автоколебания возле нижней или верхней границы зоны нечувствительности, что снижает точность регулирования. Проблема усугубляется действующими на объект сигнальными возмущениями. На фиг. 2 показаны результаты подобного эффекта, где приведены результаты компьютерного моделирования управления (1) объектом, который описывается дифференциальным уравнением

Техническим результатом изобретения является повышение точности управления.
Технический результат достигается тем, что в регулятор с релейной характеристикой, содержащий индикатор экстремумов, релейный блок, нуль орган, сумматор, коммутирующий элемент и блок обнаружения отклонений введен второй сумматор.
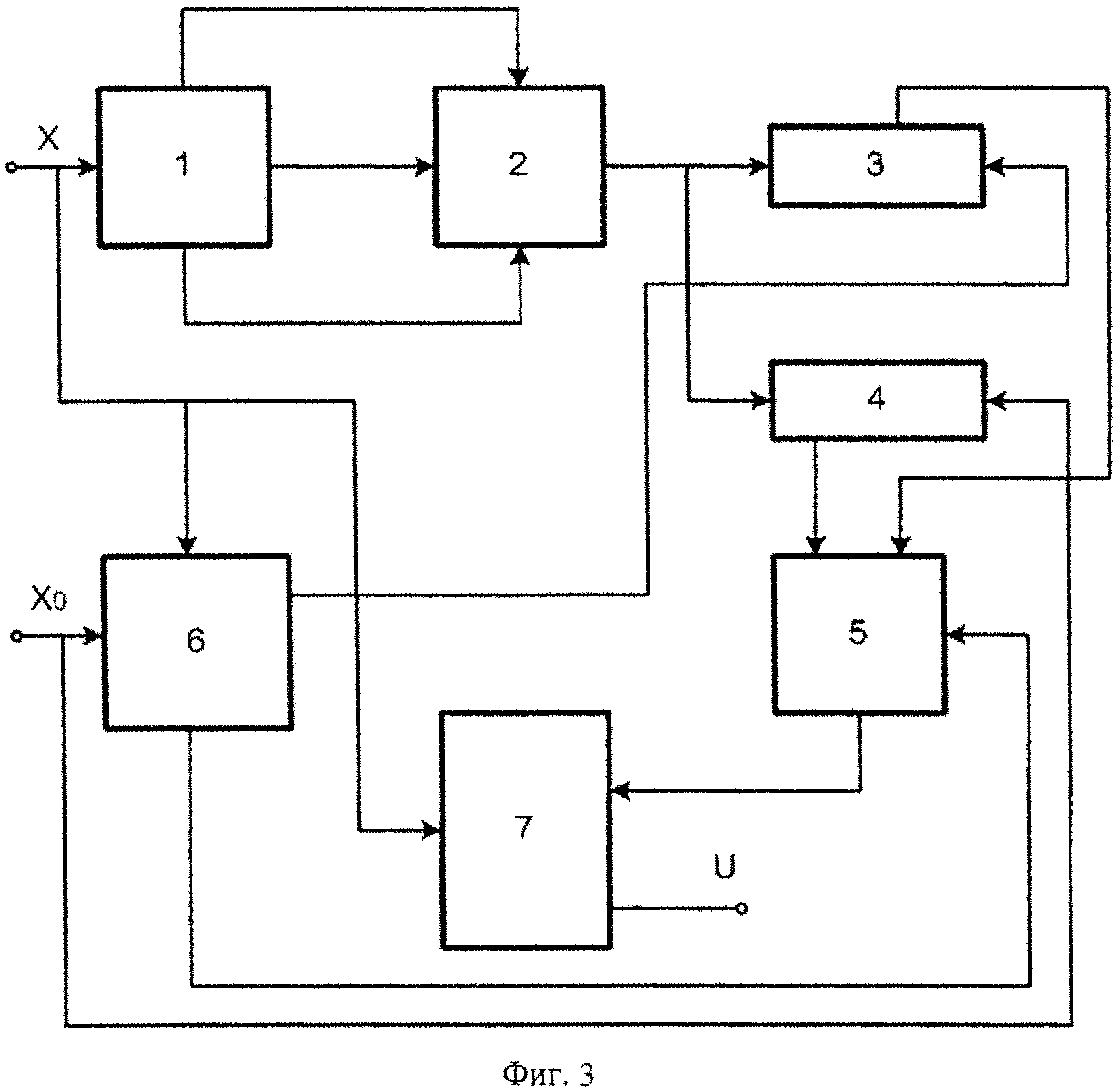
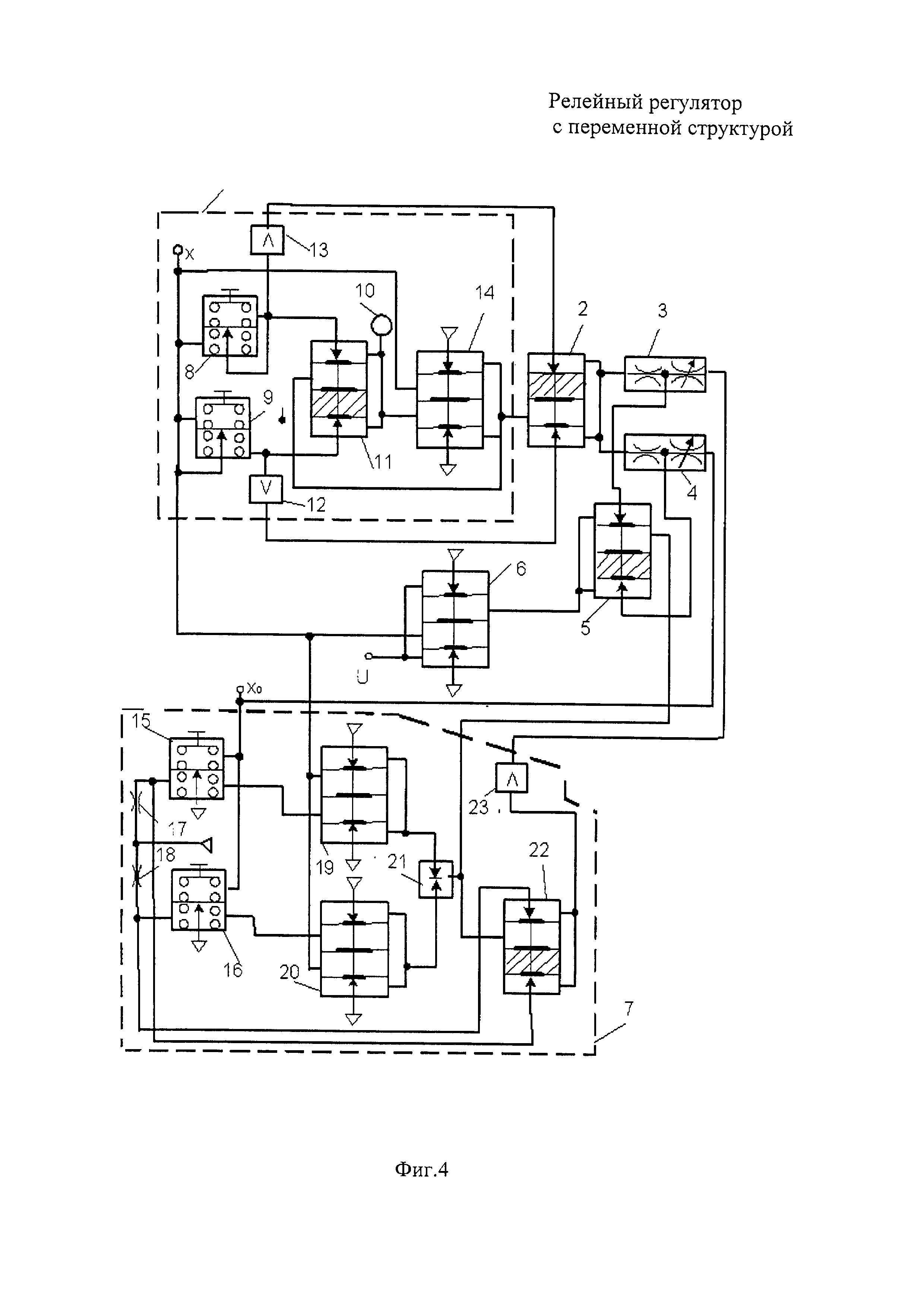
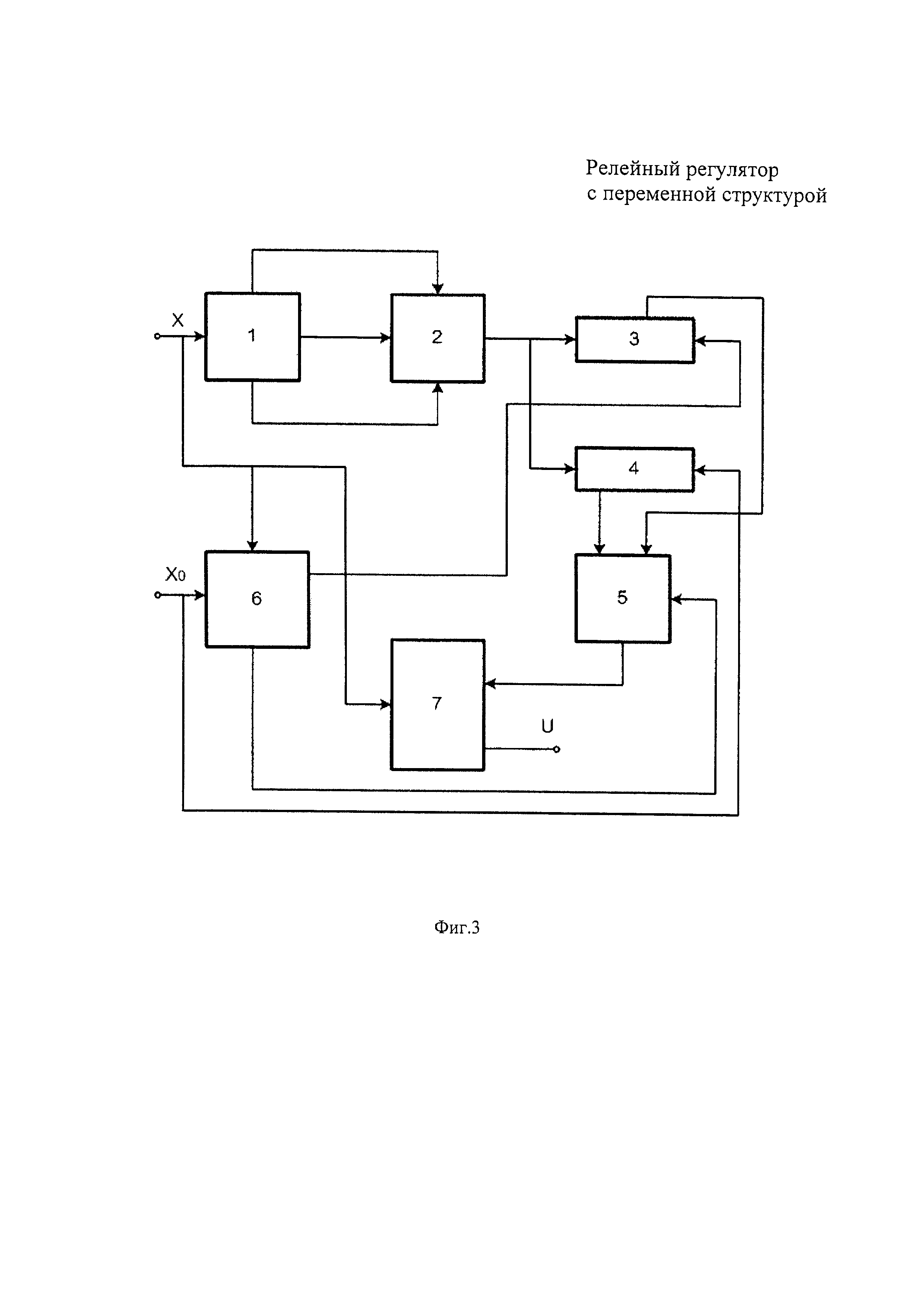
Регулятор изображен на фиг. 3, где представлена его блок-схема, фиг. 4 иллюстрирует пример конкретного выполнения регулятора на пневматических элементах, на фиг. 5 приведена его статическая характеристика, на фиг. 6 - процессы результатов исследования регулятора.
Регулятор содержит (фиг. 3) индикатор экстремумов 1, релейный блок 2, сумматоры 3 и 4, коммутирующий элемент 5, блок обнаружения отклонений 6, нуль-орган 7. Буквами X, Х0 и U - обозначены соответственно первый вход регулятора, второй вход регулятора и его выход. Первый вход регулятора (переменная - X) соединен с первыми входами индикатора экстремумов 1, блока обнаружения отклонений 6 и нуль-органа 7. Второй вход (X0 - уставка) связан со вторыми входами блока обнаружения отклонений 6 и сумматора 4. Информационный выход блока 6 соединен с первым входом сумматора 3, второй вход которого связан с выходом релейного блока 2 и вторым входом второго сумматора 4. Управляющий выход блока 6 соединен с управляющим входом коммутирующего элемента 5, коммутационные входы которого подключены к выходам сумматоров 3 и 4, выход соединен со вторым входом нуль-органа 7, выход которого соединен с выходом регулятора U. Выходной сигнал U регулятора принимает два значения 0 или В, которые обеспечивают выключение управления объектом или его включение. Подобное соединение элементов позволяет реализовать следующий закон управления:

где М=хН+k1⋅(Хэ-хН)-X, если X<хН,
М=хВ+k1⋅(Хэ-хВ)-X, если X>хВ,
М1=Х0+k2⋅(Хэ-Х0)-Х,
Xэ - экстремальные значения регулируемой координаты X, равные ее максимуму или минимуму,
хН=Х0-с, хВ=Х0+с - соответственно величины, определяющие нижнюю и верхнюю границы зоны нечувствительности,
k1 и k2 - постоянные коэффициенты, меньшие единицы (0≤k1, k2<1),
хэ - экстремальные значения регулируемой координаты X, равные ее максимуму Хмах или минимуму Xmin,
X0 - уставка (заданное конечное значение регулируемой координаты X (переменной)),
с - половина величины зоны нечувствительности,
В - величина управляющего воздействия («полка» реле),
∧, ∨ - знаки конъюнкции и дизъюнкции.
Таким образом, регулятор так же, как и регулятор-прототип, является регулятором с отрицательным переменным гистерезисом, но внутри зоны нечувствительности меняется структура управления - переключения управления осуществляются с опережением уже по отношению к X0, что позволяет удерживать регулируемую координату в допустимых переделах (в зоне нечувствительности) и обеспечить заданную точность автоколебаний в зоне нечувствительности за счет изменения структуры управления.
Рассмотрим работу отдельных элементов регулятора и устройства в целом.
Индикатор 1 экстремумов работает следующим образом. При изменении регулируемой координаты, например, в сторону уменьшения, на выходе элемента 8 запоминается сигнал Хmах при Х<(Хmin+а), где а - величина сдвига, настраиваемая в элементе 8 запоминания, элемент 14 срабатывает и отключает элемент запоминания 8, закрыв верхний контакт реле 11, а выход элемента запоминания 9 через другой контакт реле 11 соединяется с вторым входом элемента 14 сравнения. При дальнейшем уменьшении сигнала выходной сигнал элемента 14 сравнения не изменяется. С увеличением входного сигнала на выходе элемента 9 запоминания запоминается Хmin, элемент 14 сравнения принимает исходное положение, а второй вход элемента 14 сравнения вновь соединяется с выходом элемента 8 запоминания максимума. Повторители 12 и 13 обеспечивают гальваническую развязку сигналов Хmах, Хmin, а пневмоемкость 10 - предотвращает ложные срабатывания элемента 14 при переключениях реле 11.
Релейный блок 3 (двух контактное реле) обеспечивает коммутацию Хmax, Хmin по команде с выхода элемента 14 сравнения на входы сумматоров 3 и 4, которые выполнены по схеме дроссельного сумматора. Их выходы равны (1-ki)Аi+kiХэ, где ki=di/(di+bi), i=1, 2 di и bi - проводимости дросселей сумматоров 3 и 4, a Ai, i=1, 2 и Хэ - сигналы, действующие на входах сумматоров 3 и 4. Изменения ki приводят к изменению амплитуды автоколебаний.
Блок обнаружения отклонений 7 - устройство, формирующее на своем первом выходе дискретный сигнал, если входной сигнал X становится меньше сигнала хН или больше сигнала хВ, которые определяют нижнюю и верхнюю границы зоны нечувствительности. Он содержит (фиг. 4) дроссели питания 17, 18 и повторители со сдвигом 15 и 16, входы которых соединены со вторым входом регулятора X0, а выходы - со входами элементов 19 и 20. С помощью элементов 15 и 16 задается зона допустимых отклонений соответственно +с и -с относительно уставки X0. При этом, если сигнал X меньше сигнала хН, то срабатывает элемент 20, его выходной сигнал через элемент ИЛИ 21 появляется на первом выходе блока 7 и одновременно переключает реле 22, обеспечивая коммутацию сигнала хН на второй выход блока 5 через усилитель 23. Если сигнал X больше сигнала хВ, то срабатывает элемент 19 и его выходной сигнал через элемент ИЛИ 21 появляется на первом выходе блока 7 и одновременно переключает реле 22, обеспечивая коммутацию сигнала ХВ на второй выход блока 5 через усилитель 23. Элемент 19 при этом находится в исходном состоянии и на выход реле 22 по-прежнему проходит сигнал хВ. Если входной сигнал находится в зоне допустимых отклонений, то на выходах элементов 19 и 20 - «0».
Коммутирующий элемент 5 - реле, включенное по схеме коммутации двух сигналов, переключается дискретным сигналом блока 7. Этот элемент обеспечивает коммутацию выходных сигналов сумматоров 3 и 4 на второй вход нуль-органа 6.
Работу регулятора в целом рассмотрим с привлечением рисунков на фиг. 4, 5 и 6. Пусть сигнал X нарастает от нуля в сторону увеличения. Тогда экстремальные значения этого сигнала в момент включения регулятора равны нулю. Один из этих сигналов Хmin проходит через релейный блок 3 и сумматоры 3 и 4, на вторых входах которых действуют сигналы соответственно хН и Х0, на входы элемента 5. Верхний контакт элемента 5 открыт дискретным сигналом элемента 20, поскольку сигнал хН на входе элемента 20 больше входного сигнала X. Таким образом, на входе нуль-органа 2 в момент включения регулятора действует сигнал (1-k1)хН>0 и на его выходе формируется сигнал управления U=B=«1». Как только входной сигнал X достигнет величины (1-k1)хН, нуль-орган 2 принимает исходное состояние. В результате выходной сигнал регулятора становится равным U=0. Если появляется экстремальное значения входного сигнала регулятора Хэ=Хмах вне зоны допустимых отклонений, выходной управляющий сигнал индикатора экстремумов 1 становится равным «0», поскольку на прямом входе элемента 6 действует сигнал хН+k1(Хэ-хН)>Х=Хмах. Элемент 20 срабатывает и на его выходе - «1». В результате выходной сигнал регулятора вновь становится равным U=«1». Если сигнал X достигает нижней границы хН, элемент 20 вновь срабатывает и теперь на вход нуль-органа 6 через открытый верхний контакт элемента 5 проходит сигнал с выхода сумматора 4, равный X0+k2(Хэ-Х0)-Х. Теперь все переключения внутри зоны нечувствительности будут происходить с опережением относительно Х0. Если входной сигнал X окажется выше границы хВ, цикл всех переключений повторится, но теперь уже под управлением элемента 19.
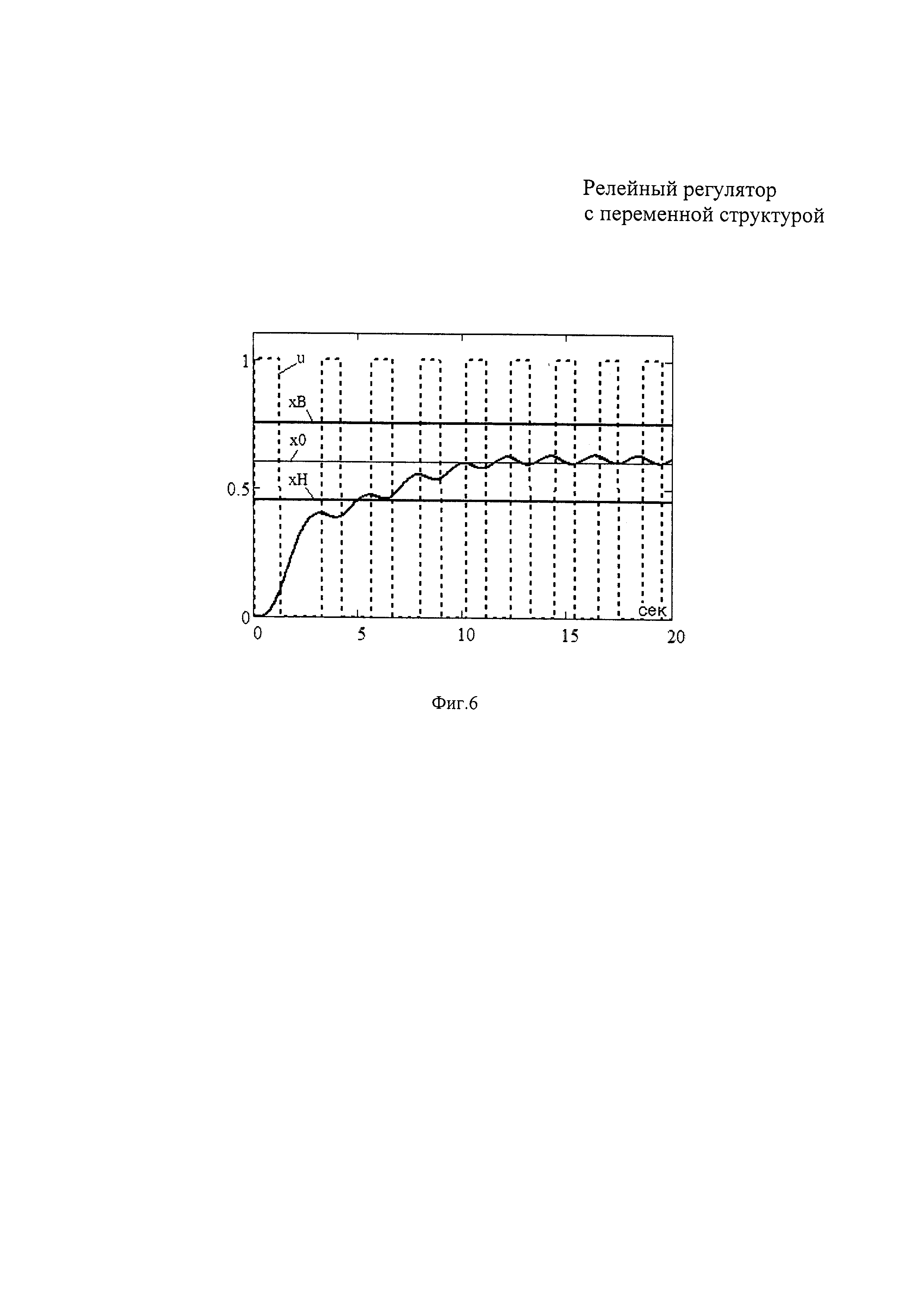
На фиг. 5 приведена статическая характеристика регулятора с переключениями в соответствии с описанием его работы в предположении, что сигнал X выходит за зону нечувствительности справа. Работа регулятора (3) в динамике иллюстрируется рисунком фиг. 6, где представлены процессы изменения сигналов регулятора при его использовании в системе управления объектом, который описывается дифференциальным уравнением (2).
Коэффициенты и выходные сигналы источников сигналов были следующими Х0=0.6, k1=0.25, k2=0.9, с=0.1, B=1. Из рисунка фиг. 6 видно, что первое переключение управления происходит с «недоходом» регулируемой координаты X до величины хН. Затем, когда X попадает в зону нечувствительности переключения, происходят с опережением теперь относительно Х0.
Настройка регулятора связана с установкой коэффициентов ki, i=1, 2, таким образом, чтобы амплитуда автоколебаний в системе была бы не больше величины зоны нечувствительности. Коэффициент k1<k2. Это позволяет при больших отклонениях (за зону нечувствительности) повысить быстродействие системы, а в зоне нечувствительности - точность.
Релейный регулятор с переменной структурой, содержащий блок обнаружения отклонений, сумматор, релейный блок, коммутирующий элемент, нуль-орган, индикатор экстремумов, вход которого подключен к первому входу регулятора, первому входу блока обнаружения отклонений и второму инверсному входу нуль-органа, а выходы соединены с входами релейного блока, выход которого подключен к первому входу сумматора, второй вход сумматора связан с информационным выходом блока обнаружения отклонений, а выход подключен к первому входу коммутирующего элемента, управляющий вход которого соединен с управляющим выходом блока обнаружения отклонений, второй вход которого подключен ко второму входу регулятора, отличающийся тем, что в него введен второй сумматор первый вход которого соединен с выходом релейного блока, второй вход - с первым входом регулятора, а выход - со вторым входом коммутирующего элемента, выход которого соединен с первым входом нуль-органа, выход которого подключен к выходу регулятора.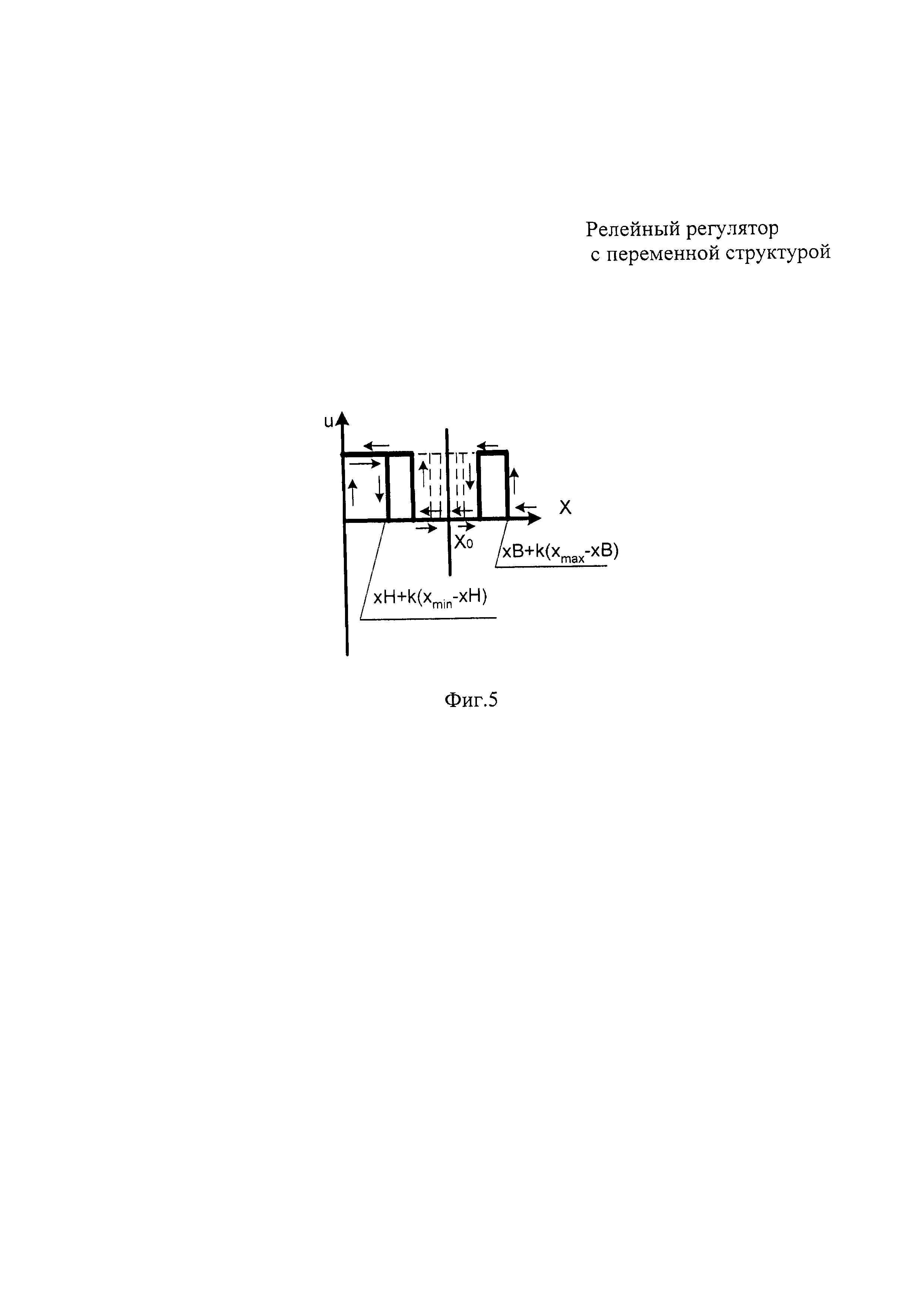
Энергоэффективная электрическая машина с нетрадиционным электромагнитным ядром
Теплоноситель
Зубострогальный инструмент
Способ изготовления керамического кирпича
Способ и устройство для изготовления удлиненных кумулятивных зарядов
Следящий электропривод с асинхронным исполнительным двигателем
Способ контроля процесса створения двухстворчатых ворот шлюзового отсека и устройство для его реализации
Шихта для получения порошка композитного материала на основе железа
Способ испытаний материалов для определения силовых параметров при получении полых заготовок обработкой давлением
Гидрораспределитель

