Способ управления штанговым скважинным насосом
Вид РИД
Изобретение
Область техники
Изобретение относится к способам управления штанговым скважинным насосом (ШСН), включающим контроль заполнения скважины по объему всасываемой насосом жидкости, которые основаны на измерении электрических параметров приводного асинхронного электродвигателя. Такой контроль заполнения скважины не требует установки динамометрического датчика на элементах механического привода штангового насоса (например, на его штоке) для определения усилий, соответствующих степени заполнения всасывающей полости скважинного насоса.
Изобретение может найти применение в установках добычи нефти, снабженных механическим приводом в виде станка-качалки с кривошипно-шатунным механизмом или в виде зубчато-реечного линейного привода.
Уровень техники
Известен способ управления ШСН с контролем заполнения скважины, основанным на динамограмме усилий, отражающих степень заполнения всасывающей полости штангового насоса [RU 2546376].
Недостаток этого аналога - необходимость установки и эксплуатационного обслуживания динамографа (датчика, измеряющего механические усилия на верхней штанге ШСН или на других элементах его механического привода), снабженного автономным источником питания.
Известны способы управления ШСН с контролем степени заполнения всасывающей полости насоса (и, следовательно, заполнения скважины) по измеряемым электрическим параметрам (току, напряжению) приводного электродвигателя, которые используют для определения величины, характеризующей вращающий момент на валу приводного электродвигателя, что, в свою очередь, позволяет отслеживать усилия на верхней штанге ШСН [ЕА 201500517, US 5362206].
В качестве прототипа выбран известный способ управления штанговым скважинным насосом с контролем заполнения скважины, заключающийся в том, что измеряют ток и напряжение питания электродвигателя, определяют фазовый угол между ними и при превышении указанным углом заданного порога останавливают электродвигатель на ожидаемое (прогнозируемое) время заполнения скважины, после чего возобновляют работу электродвигателя с контролем указанного превышения [патент US 5362206].
Недостаток прототипа - низкая достоверность оценки заполнения скважины по выбранному в прототипе критерию - фазовому углу между током и напряжением питания электродвигателя.
Сущность изобретения
Предметом изобретения является способ управления штанговым скважинным насосом с контролем заполнения скважины, заключающийся в том, что измеряют ток питания асинхронного электродвигателя насоса, рассчитывают активную составляющую измеренного тока, формируют и запоминают эталонную диаграмму активной составляющей за цикл работы насоса, формируют текущие диаграммы указанной составляющей, вычисляют по выбранному критерию их отклонение от эталонной диаграммы и при превышении вычисленным отклонением порога останавливают электродвигатель на прогнозируемое время заполнения скважины, после чего возобновляют работу электродвигателя с контролем указанного превышения.
Развития изобретения раскрывают две возможности вычисления активной составляющей измеренного тока, которые состоят в том, что:
- активную составляющую измеренного тока рассчитывают с использованием паспортных данных асинхронного электродвигателя;
- активную составляющую измеренного тока рассчитывают как проекцию вектора измеренного тока на направление вектора дополнительно измеренного напряжения питания электродвигателя.
Заявляемый способ, как и выбранный прототип, основан на измерении электрических параметров асинхронного электродвигателя штангового насоса, позволяющих оценивать вращающий момент на валу приводного электродвигателя ШСН, но отличается тем, что в нем в качестве критерия оценки используют не фазовый угол между током и напряжением, а активную составляющую измеряемого тока, которая, как будет показано в разделе «Осуществление изобретения», точнее отражает фактические значения вращающего момента на валу электродвигателя и соответствующего усилия в верхней штанге насоса.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, - повышение достоверности контроля заполнения скважины.
Осуществление изобретения с учетом его развития
ШСН связан с приводным асинхронным электродвигателем через механический привод, преобразующий вращательное движение вала электродвигателя в возвратно-поступательное движение штока, колонны штанг и плунжера скважинного насоса. Такой механический привод выполняют в виде станка-качалки с кривошипно-шатунным механизмом [RU 2532488] или линейного привода с зубчато-реечным механизмом [RU 159640].
Предлагаемый способ может быть осуществлен с помощью программируемого контроллера управления ШСН, снабженного аналого-цифровым преобразователем для оцифровки показаний датчика тока (и, возможно, датчика напряжения).
Способ осуществляют следующим образом.
Измеряют ток I1 питания приводного асинхронного электродвигателя ШСН. По оцифрованным значениям измеренного тока рассчитывают его активную составляющую (активный ток статора асинхронного двигателя).
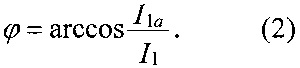
Описанные далее расчеты, выполняемые контроллером ШСН, основаны на известной векторной диаграмме асинхронного двигателя, представленной на фиг. 1 [В.Я. Беспалов, И.Ф. Котеленец. Электрические машины. - М.: Изд. Центр Академия, 2006, стр. 138].
Из векторной диаграммы асинхронного двигателя (фиг. 1) имеем:
где  - вектор питающего тока (тока статора),
- вектор питающего тока (тока статора),  - приведенный к статору вектор тока ротора,
- приведенный к статору вектор тока ротора,  - вектор тока намагничивания.
- вектор тока намагничивания.
Расчеты выполняются исходя из того, что в установившемся режиме работы асинхронного двигателя его скольжение мало и приведенный к статору ток ротора является активным, т.е. совпадает по фазе с приложенным напряжением U1. Поэтому
где  - приведенная к статору активная составляющая тока ротора, I1a - активная составляющая тока статора.
- приведенная к статору активная составляющая тока ротора, I1a - активная составляющая тока статора.
По формуле  рассчитывается активная составляющая тока статора приводного асинхронного двигателя. Здесь Iμн - номинальный ток намагничивания, предварительно рассчитанный по формуле
рассчитывается активная составляющая тока статора приводного асинхронного двигателя. Здесь Iμн - номинальный ток намагничивания, предварительно рассчитанный по формуле  , где I1н и cosϕн - номинальные (паспортные) значения тока статора и коэффициента мощности приводного асинхронного двигателя.
, где I1н и cosϕн - номинальные (паспортные) значения тока статора и коэффициента мощности приводного асинхронного двигателя.
Активная составляющая тока статора I1а может быть определена также с помощью другой последовательности вычислений, выполняемых программируемым контроллером. Например, она может быть вычислена как проекция вектора измеренного тока I1 на направление вектора дополнительно измеренного напряжения питания электродвигателя.
Полученное значение I1а используют для формирования в памяти контроллера эталонной и текущей временных диаграмм  и
и  . Диаграммы
. Диаграммы  формируют за цикл работы штангового насоса, используя для этого (как и в прототипе) датчик перемещения, установленный на элементе механического привода и отражающий текущее положение плунжера и штока штангового насоса при возвратно-поступательном движении.
формируют за цикл работы штангового насоса, используя для этого (как и в прототипе) датчик перемещения, установленный на элементе механического привода и отражающий текущее положение плунжера и штока штангового насоса при возвратно-поступательном движении.
Эталонную диаграмму  снимают (формируют и обновляют в памяти контроллера) изредка (например, раз в месяц), когда насос заведомо работает в штатном режиме (полное заполнение полости насоса, отсутствие неисправностей и т.п.).
снимают (формируют и обновляют в памяти контроллера) изредка (например, раз в месяц), когда насос заведомо работает в штатном режиме (полное заполнение полости насоса, отсутствие неисправностей и т.п.).
Текущую диаграмму  снимают непрерывно или с заданной периодичностью (например, каждые полчаса).
снимают непрерывно или с заданной периодичностью (например, каждые полчаса).
Снятые текущие диаграммы  сравнивают с хранящейся в памяти контроллера эталонной диаграммой
сравнивают с хранящейся в памяти контроллера эталонной диаграммой  , вычисляя их отклонение от эталонной диаграммы.
, вычисляя их отклонение от эталонной диаграммы.
Отклонение вычисляют по выбранному критерию (в простейших случаях это может быть максимальная или среднеквадратичная разность совмещенных во времени диаграмм) и сравнивают с заданным допустимым значением отклонения. Выбранный критерий может предусматривать вычисление отклонений с разными весовыми коэффициентами на разных участках цикла (например, для части цикла, соответствующей подъему штанги, отклонения могут вычисляться с коэффициентом единица, а для остальной части цикла - с коэффициентом ноль).
Если полученное отклонение превысит заданный порог (что свидетельствует о существенном несоответствии текущей и эталонной диаграмм), приводной электродвигатель останавливают по сигналу контроллера и запускают таймер на ожидаемое (прогнозируемое) время естественного заполнения скважины (например, на один час). По окончании этого времени (по сигналу срабатывания таймера) возобновляют работу приводного двигателя и процесс формирования и запоминания текущей диаграммы, вычисления их отклонения друг от друга и сравнения полученного отклонения с заданным порогом. Повторное превышение указанного отклонения может использоваться как основание, в частности, для следующих выводов:
- о возникновении неисправности насоса или его механического привода (с последующей диагностикой дефекта);
- о целесообразности увеличения прогнозируемого времени заполнения скважины;
- о принятии мер по повышению пластового давления.
Сопоставим заявленный способ с прототипом.
Согласно вышеизложенному в заявленном способе оценка усилия на верхней штанге ШСН, т.е. оценка усилия, непосредственно отражающего степень заполнения всасывающей полости насоса и (в случае отсутствия дефектов в ШСН и его механическом приводе) степень заполнения скважины, производится косвенно - по значению вращающего момента как функции активной составляющей I1а статорного тока приводного двигателя, вычисляемой по результатам измерения тока питания, потребляемого двигателем.
Как известно [О.Д. Гольдберг, С.П. Хелемская. Электромеханика. - М.: Изд. Центр Академия, 2007, стр. 205], вращающий момент М на валу асинхронного двигателя связан с магнитным потоком Ф и активной составляющей тока статора I1а соотношением
где к постоянный коэффициент.
При постоянном магнитном потоке Ф это выражение может быть записано в виде линейной (пропорциональной) зависимости между активной составляющей тока асинхронного двигателя и вращающим моментом

где C=const.
В прототипе для оценки усилия в верхней штанге ШСН и соответствующего ему вращающего момента на валу приводного двигателя используется текущее значение угла ϕ между приложенным напряжением U1 (совпадающим по фазе с активной составляющей тока статора I1а) и измеряемым током статора I1. Как видно из векторной диаграммы (фиг. 1), значение угла ϕ определяется соотношением
Из совместного рассмотрения выражений (1) и (2) следует, что используемая в прототипе зависимость М(ϕ) имеет нелинейный характер и, следовательно, с большей погрешностью отражает вращающий момент на валу электродвигателя, чем линейная зависимость М(I1а), используемая в предлагаемом способе.
Таким образом, использование активной составляющей тока статора приводного асинхронного двигателя в качестве оценки величины вращающего момента на его валу (вместо фазового угла, используемого для этой цели в прототипе) позволяет получить вышеуказанный технический результат заявляемого способа - повышение достоверности контроля степени заполнения скважины.
Высоковольтный преобразователь частоты с накопителем энергии
Высоковольтный преобразователь частоты с накопителем энергии

