Результат интеллектуальной деятельности: ГИРОГОРИЗОНТКОМПАС
Вид РИД
Изобретение
Изобретение относится к области навигации, в частности к гирокомпасам, и предназначено для повышения точности определения курса.
Известны гирокомпасы с приведением в плоскость меридиана кинетических моментов гироскопов [1]. Такие гирокомпасы обладают большими габаритами и весом.
С появлением точных датчиков угловой скорости (ДУСов) появились гирокомпасы со слежением за минимальным значением восточной составляющей скорости вращения Земли [2]. Их недостатком является ограничение точности собственными уходами гироскопов.
Дрейф гироскопов отделяют от полезного сигнала автокомпенсацией путем ограниченного поворота чувствительных элементов [3] или их неограниченного вращения [4].
Недостатком принятого за прототип «Гирогоризонткомпаса» [4] является излишняя связь канала вертикали с каналом азимута. Гирогоризонт является звеном в канале азимута, и, следовательно, его выходной сигнал зависит от параметров двух фильтров. Это приводит к потере точности из-за искажения сигнала фильтрами обоих каналов и к сложности их оптимального выбора.
Целью изобретения является создание гирогоризонткомпаса, в котором определение азимута осуществляется без амплитудных и фазовых искажений, вносимых фильтрами.
Известный гирогоризонткомпас содержит датчик вертикальной угловой скорости, преобразователь координат, датчик курсового угла и состоящий из первого интегратора, регулируемого звена и второго интегратора замкнутый контур гирогоризонта, выход которого по углам качки расположен между вторым и первым интеграторами. Указанная цель достигается тем, что в гирогоризонт введен расположенный между регулируемым звеном и вторым интегратором второй выход по сигналу проекций скорости вращения Земли, а в гирогоризонткомпас введен новый замкнутый контур вычисления производных от проекций скорости вращения Земли. Контур вычисления производных состоит из последовательно соединенных суммирующего устройства, блока азимута, блока производных и фильтра. Новый контур через суммирующее устройство соединен со вторым выходом гирогоризонта. Параметры фильтра установлены так, что полезный сигнал на выходе суммирующего устройства от них не зависит. Блок производных соединен с датчиком вертикальной угловой скорости. Выход блока азимута является выходом гирогоризонткомпаса по азимуту и подключен к входу преобразователя координат, два других входа которого соединены с первым выходом гирогоризонта и датчиком курсового угла. Выход преобразователя координат является выходом гирогоризонткомпаса.
Технический эффект заключается в повышении точности выработки приборного азимута и курса объекта.
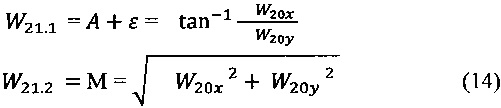
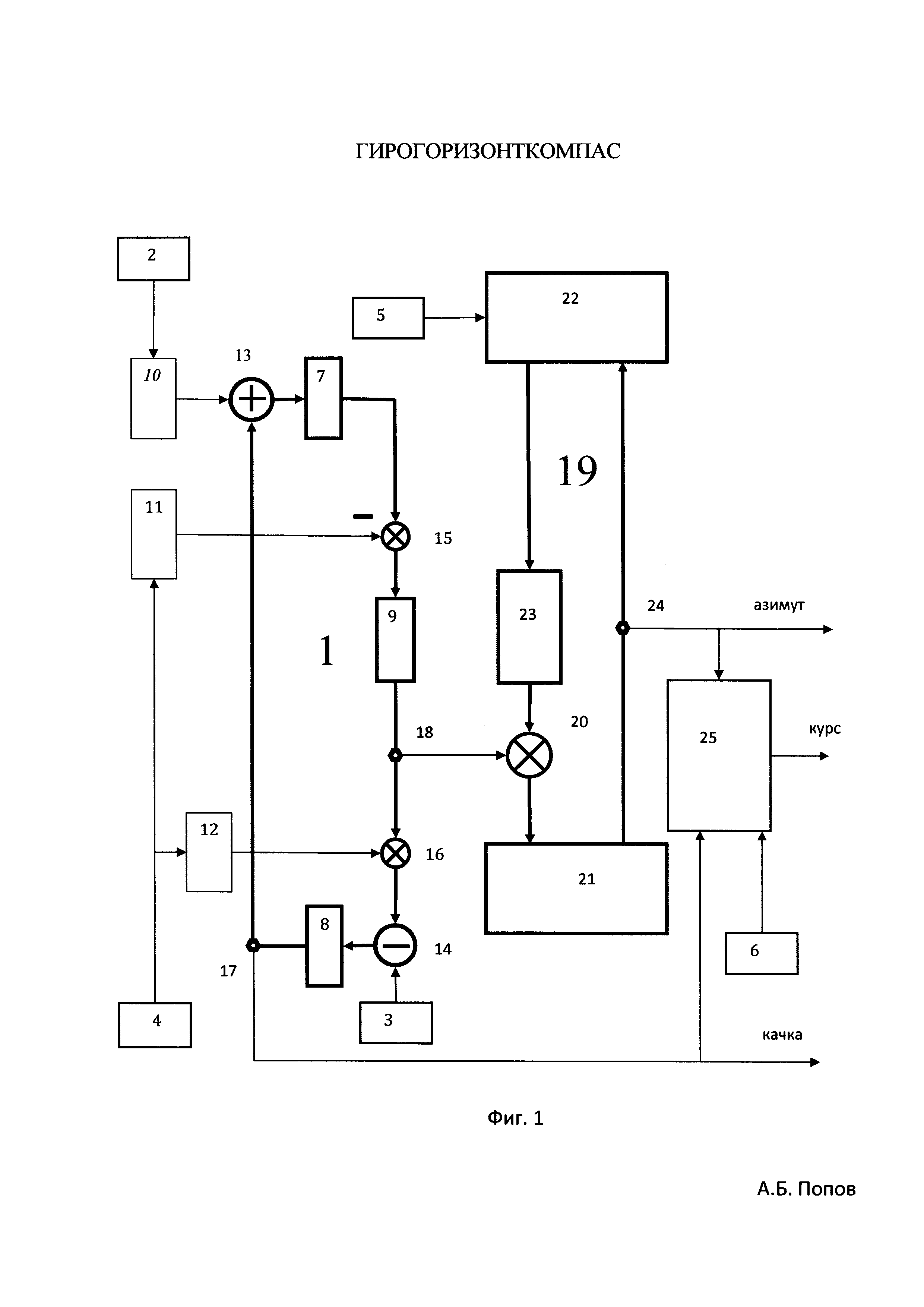
Устройство гирогоризонткомпаса приведено на Фиг. 1. На ней изображены следующие элементы: 1 - контур гирогоризонта,
2, 3, 4, 5, 6 - источники информации: 2 - акселерометры (АКС), 3 - датчики горизонтальных составляющих угловой скорости (ДУС), 4 - датчик линейной скорости - спутниковая навигационная система (СНС), 5 - датчик вертикальной угловой скорости (ДУСв), 6 - датчик курсового угла q
7, 8, 9 - звенья контура: 7, 8 - первый и второй интеграторы с передаточной функцией  , 9 - регулируемое звено с передаточной функцией
, 9 - регулируемое звено с передаточной функцией  ,10, 11, 12 - масштабирующие устройства: 10, 11 - с коэффициентом передачи
,10, 11, 12 - масштабирующие устройства: 10, 11 - с коэффициентом передачи  , 12 - с коэффициентом передачи
, 12 - с коэффициентом передачи  , g, R - ускорение свободного падения и радиус Земли соответственно.
, g, R - ускорение свободного падения и радиус Земли соответственно.
13, 14 - входы контура гирогоризонта по сигналам АКС и ДУС соответственно,
15, 16 - входы контура гирогоризонта по сигналу СНС,
17- выход контура гирогоризонта по углам качки α, β,
18 - выход контура гирогоризонта по горизонтальным проекциям скорости вращения Земли,
19 - контур производных от проекций скорости вращения Земли,
20 - суммирующее устройство,
21 - блок азимута,
22 - блок производных,
23 - фильтр
24 - выход гирогоризонткомпаса по азимуту.
25 - преобразователь координат (ПК).
Гирогоризонткомпас содержит замкнутый контур гировертикали 1 и источники информации: 2 - акселерометры, 3 - датчики горизонтальных составляющих угловой скорости, 4 - датчики линейной скорости, 5 - датчик вертикальной составляющей угловой скорости, 6 - датчик курсового угла. Контур гировертикали состоит из первого интегратора 7, второго интегратора 8 и регулируемого звена 9, расположенного между ними. Информационные сигналы масштабируются: сигнал акселерометра на устройстве 10, а сигнал датчика линейной скорости (СНС) на устройствах 11, 12. Контур имеет четыре входа: 13 - по сигналу акселерометров, 14 - по сигналу датчиков горизонтальных угловых скоростей, 15 и 16 - по сигналу спутниковой навигационной системы, и два выхода: 17- по углам качки и 18 - по горизонтальным проекциям скорости вращения Земли. Гировертикаль соединена с контуром производных от проекций скорости вращения Земли 19 через суммирующие устройство 20, которое является частью кольца из последовательно соединенных блока азимута 21, блока производных 22 и фильтра 23, который замыкает кольцо соединением его выхода с входом суммирующего устройства. Блок производных соединен с датчиком вертикальной скорости вращения. Выход 24, расположенный между блоками азимута и производных, является выходом гирогоризонткомпаса по азимуту и подключен к преобразователю координат 25, два других входа которого соединены с выходом гировертикали по качке и датчиком курсового угла. Выход преобразователя координат является выходом гирогоризонткомпаса по курсу.
Универсальное свойство контура 1 состоит в том, что если на его вход 13 подать полезный сигнал, например, угла качки, с ошибкой α+Δ1, а на вход 14 подать производную того же сигнала, с другой ошибкой pα+Δ2, то сигнал на выходе 17 - W1.1 будет содержать инвариантный к передаточной функции H сигнал, в частности, угла качки α. Ошибка сигнала отфильтрована на фильтре низких частот  , а ошибка его производной - на полосовом фильтре
, а ошибка его производной - на полосовом фильтре  :
:

Рассмотрим работу схемы гирогоризонта. Примем, что источники информации измеряют следующие сигналы
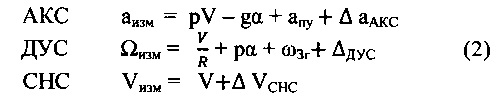
где V - линейная скорость корабля по поверхности Земли, Ω - угловая скорость, α - углы качки, ωЗг - горизонтальные составляющие скорости вращения Земли, aпу - переносные ускорения качки, ΔаАКС, ΔДУС, ΔVСНС - погрешности соответствующих датчиков.
После замены переменных  ,
,  и масштабирования на входы контура 1 поступят сигналы:
и масштабирования на входы контура 1 поступят сигналы:

где  - квадрат постоянной времени М. Шулера.
- квадрат постоянной времени М. Шулера.
Выходные сигналы контура 1 запишутся в общем виде:

После подстановки входных сигналов получим

Полезный сигнал выхода 17 инвариантен к передаточной функции H. Контур с этим выходом представляет собой гировертикаль, не возмущаемую линейными ускорениями маневрирования - pV.
Контур с выходом 18 – не возмущаемый линейными ускорениями и углами качки измеритель горизонтальных составляющих угловой скорости вращения Земли - ωЗГ.
Сигналы СНС компенсируют вырабатываемые АКС и ДУС сигналы скорости движения корабля по поверхности Земли, обеспечивая невозмущаемость обоих выходов.
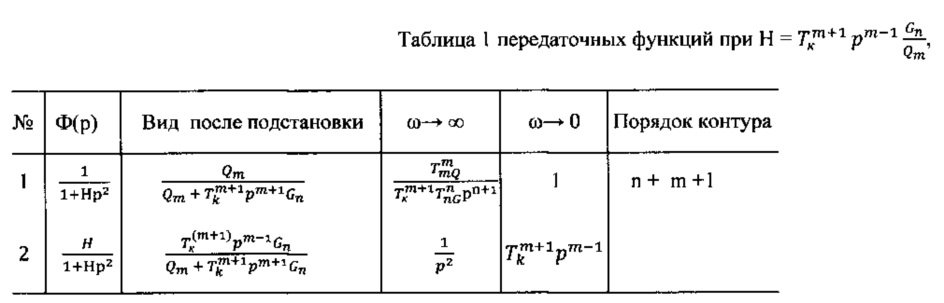
Рассмотрим самый общий вид передаточной функции регулируемого звена 9, не накладывая на нее никаких ограничений, кроме требования обеспечения устойчивости контура

где: Тк - постоянная времени, тип-показатели степени, Gn и Qm - полиномы степеней пит соответственно с единичными свободными членами:

Передаточные функции контура будут иметь вид, приведенный в таблице 1. В таблице приведен общий вид функций и вид, который они приобретают на высоких частотах ω→∞ и на низких частотах ω→0.
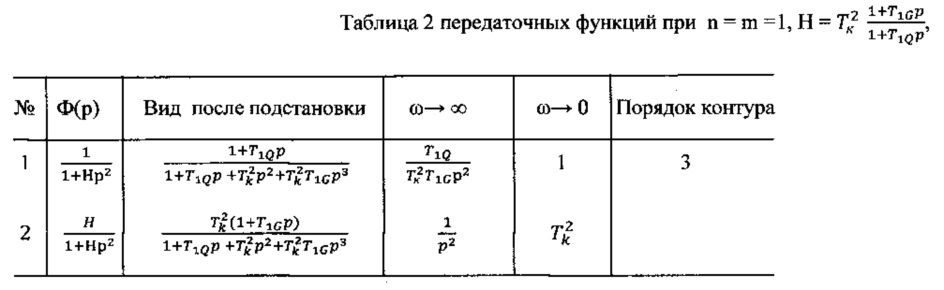
Для примера в таблице 2 приведены передаточные функции контура третьего порядка.
В таблице 3 показан уровень подавления погрешностей в зависимости от степеней n и m. В этой таблице колебания динамической вертикали αпу условно отнесены к высокочастотной погрешности, а остальные погрешности - к низкочастотным.
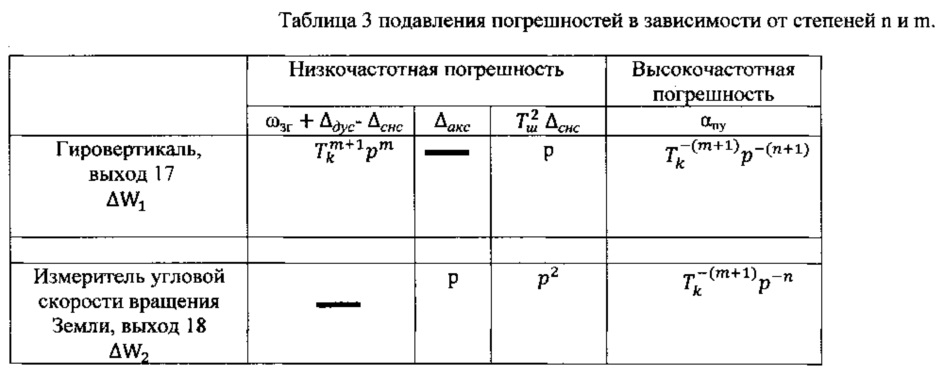
Низкочастотная погрешность подавляется за счет дифференцирования, кратность которого приведена в таблице, а высокочастотная - за счет интегрирования, кратность которого также приведена в таблице. Из таблицы видно, что для уменьшения погрешности при проектировании гирогоризонта желательно увеличивать m и n, а при разработке измерителя угловой скорости вращения Земли целесообразно увеличивать n.
На выходе 18 выбором порядка n высокочастотную погрешность можно сделать пренебрежимо малой, погрешность акселерометра и погрешность СНС, содержащая сомножитель  , исключаются при однократном или двукратном дифференцировании. В результате на втором выходе получим сигнал
, исключаются при однократном или двукратном дифференцировании. В результате на втором выходе получим сигнал

Используя автокомпенсацию [4], отделим дрейф гироскопа от полезного сигнала и получим

Погрешность Δснс не поддается ни фильтрации, ни автокомпенсации. В то же время передаточная функция  вносит амплитудные и фазовые искажения в измерения. Выражение (9) можно раскрыть в проекциях на приборные оси X, Y
вносит амплитудные и фазовые искажения в измерения. Выражение (9) можно раскрыть в проекциях на приборные оси X, Y

где: A - азимут платформы
Δснсх, Δснсу - погрешности СНС в проекциях на приборные оси,
 - модуль,
- модуль,
 - ошибка по фазе, вносимая сигналом СНС.
- ошибка по фазе, вносимая сигналом СНС.
Для того чтобы исключить зависимость от передаточной функции, можно по аналогии с (1) построить контур 19, в котором блок 22 вырабатывает сигналы производных:

Если в фильтре 23 установить передаточную функцию  , то на его выходе получим
, то на его выходе получим

При сложении в суммирующем устройстве 20 сигнала на выходе фильтра с сигналом выхода 18 гирогоризонта получим сигнал, инвариантный к передаточной функции.

По этим сигналам в блоке азимута 21 вычисляются азимут и модуль
Не зависимый от передаточной функции сигнал A+ε поступает на выход 24 контура азимута 19 и одновременно на блок производных 22. В этот же блок от датчика вертикальной угловой скорости 5 подается сигнал скорости изменения азимута с соответствующей погрешностью

В результате вырабатываются функции (11), которые по циклу поступают на фильтр 23. В фильтре формируется передаточная функция  , и на его выходе получим
, и на его выходе получим

Выражения (16) отличаются от формул (12) наличием погрешности  , вносимых датчиком вертикальной угловой скорости 5.
, вносимых датчиком вертикальной угловой скорости 5.
Обращаясь к таблице 1, можно заключить, что при высоком порядке m на выходе фильтра 23 погрешность от дрейфа вертикального гироскопа будет как угодно малой за счет многократного дифференцирования низкочастотного сигнала.
В конечном счете, на выходе 24 контура 19 получим азимут с единственной значимой погрешностью из-за ошибки в измерении скорости СНС.

Например, при ΔVCHC=0,2 м*с-1, ϕ=60°, погрешность не превысит величины ε=10-3=3 угл. мин.
По полученному в блоке 21 азимуту A, углам качки α, β, поступающим с выхода 17 гирогоризонта, и курсовому углу q, вырабатываемому датчиком 6, в преобразователе координат 25 вычисляется курс K, например, по формуле

где Q - курсовой угол в приборной горизонтной системе координат вычисляется из уравнения

где Ψ, θ - килевая и бортовая качка.
Курс K с выхода преобразователя координат поступает потребителю.
Повышение точности достигается за счет уменьшения погрешностей при увеличении порядка фильтров и исключения амплитудных и фазовых искажений, вносимых фильтрами.
Источники информации
1. Ривкин С.С. Теория гироскопических устройств. Часть 2. Судостроение. Л., 1964, с. 379-435.
2. Заявка CN 204177391. Marine gyrocompass control device. Priority date 2014-11-11.
3. Патент RU №2550592. Гирогоризонткомпас.
4. Игнатьев С.В. Гирогоризонткомас на волоконно-оптических гироскопах с вращением блока чувствительных элементов. Навигация и управление движением. Сб. докладов IV конференции молодых ученых. СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2002, с. 291-298.
Гирогоризонткомпас, содержащий датчик вертикальной угловой скорости, датчик курсового угла, замкнутый контур гирогоризонта, состоящий из первого интегратора, регулируемого звена и второго интегратора с первым выходом по углам качки, расположенным на выходе второго интегратора, и преобразователь координат, два входа которого соединены с первым выходом контура гирогоризонта и датчиком курсового угла, отличающийся тем, что в контур гирогоризонта введен расположенный между регулируемым звеном и вторым интегратором второй выход по сигналу проекций скорости вращения Земли, а в гирогоризонткомпас введен новый замкнутый контур вычисления производных от проекций скорости вращения Земли, состоящий из последовательно соединенных суммирующего устройства, блока азимута, блока производных и фильтра, второй выход контура гирогоризонта через суммирующее устройство соединен с новым контуром вычисления производных от проекций скорости вращения Земли, параметры фильтра установлены так, что полезный сигнал на выходе суммирующего устройства от них не зависит, блок производных соединен с датчиком вертикальной угловой скорости, выход блока азимута является выходом гирогоризонткомпаса по азимуту и подключен к третьему входу преобразователя координат, выход преобразователя координат является выходом гирогоризонткомпаса по курсу.
Способ абсолютных измерений гравитационного поля на подвижном объекте
Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании
Прямой преобразователь перемещений для микромеханических приборов (датчик перемещений)
Система определения уклонений отвесной линии
Способ абсолютных измерений гравитационного поля на подвижном объекте
Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании
Прямой преобразователь перемещений для микромеханических приборов (датчик перемещений)

