Результат интеллектуальной деятельности: Способ обнаружения радиолокационных сигналов и радиолокационная станция для его осуществления
Вид РИД
Изобретение
Заявляемые технические решения относятся к области радиолокации, в частности к обзорным радиолокационным станциям (РЛС).
Известен способ обнаружения радиолокационных сигналов (Справочник по радиолокации. Под ред. М.И. Сколника, т.1. - М., «Сов. радио», 1976, с. 182-183), включающий излучение и прием зондирующих сигналов, вычисление отношения правдоподобия, которое сравнивают с порогом обнаружения. Если порог обнаружения превышен, принимают решение об обнаружении сигнала, в противном случае - решение о наличии только шума.
Известное устройство для осуществления известного способа содержит антенну, передающее и приемное устройства, вычислитель и последовательно соединенное с ним пороговое устройство (Справочник по радиолокации. Под ред. М.И. Сколника, т.1. - М., «Сов. радио», 1976, с. 183, рис. 1). Обнаруженные сигналы выдаются потребителю радиолокационной информации (РЛИ). Потребителем РЛИ может быть как внешний потребитель, так и внутренний, например система вторичной обработки РЛИ данной РЛС.
Недостатком известных технических решений является увеличение, иногда значительное, количества обнаруженных сигналов в условиях интенсивных пассивных помех. Пассивными помехами являются отражения зондирующего сигнала от подстилающей поверхности, от облачности, а в боевых условиях - от специально рассеиваемых в пространстве отражателей. Различить сигналы от целей и сигналы от других отражателей в известных технических решениях невозможно, поэтому потребителю РЛИ выдаются все обнаруженные сигналы. Значительное увеличение количества обнаруженных сигналов приводит к перегрузке системы обработки РЛИ и в конечном счете - к невыполнению РЛС боевой задачи.
Наиболее близким к заявляемому является способ обнаружения радиолокационных сигналов с постоянным уровнем ложных тревог, описанный в патенте РФ №2411535. Способ включает излучение зондирующих сигналов, прием, обработку, в частности череспериодную компенсацию (ЧПК), принятых сигналов в зоне обзора, запоминание уровней и координат сигналов после обработки, выдачу обнаруженных сигналов потребителю РЛИ. Обработку и выдачу сигналов потребителю производят для каждого положения луча РЛС независимо.
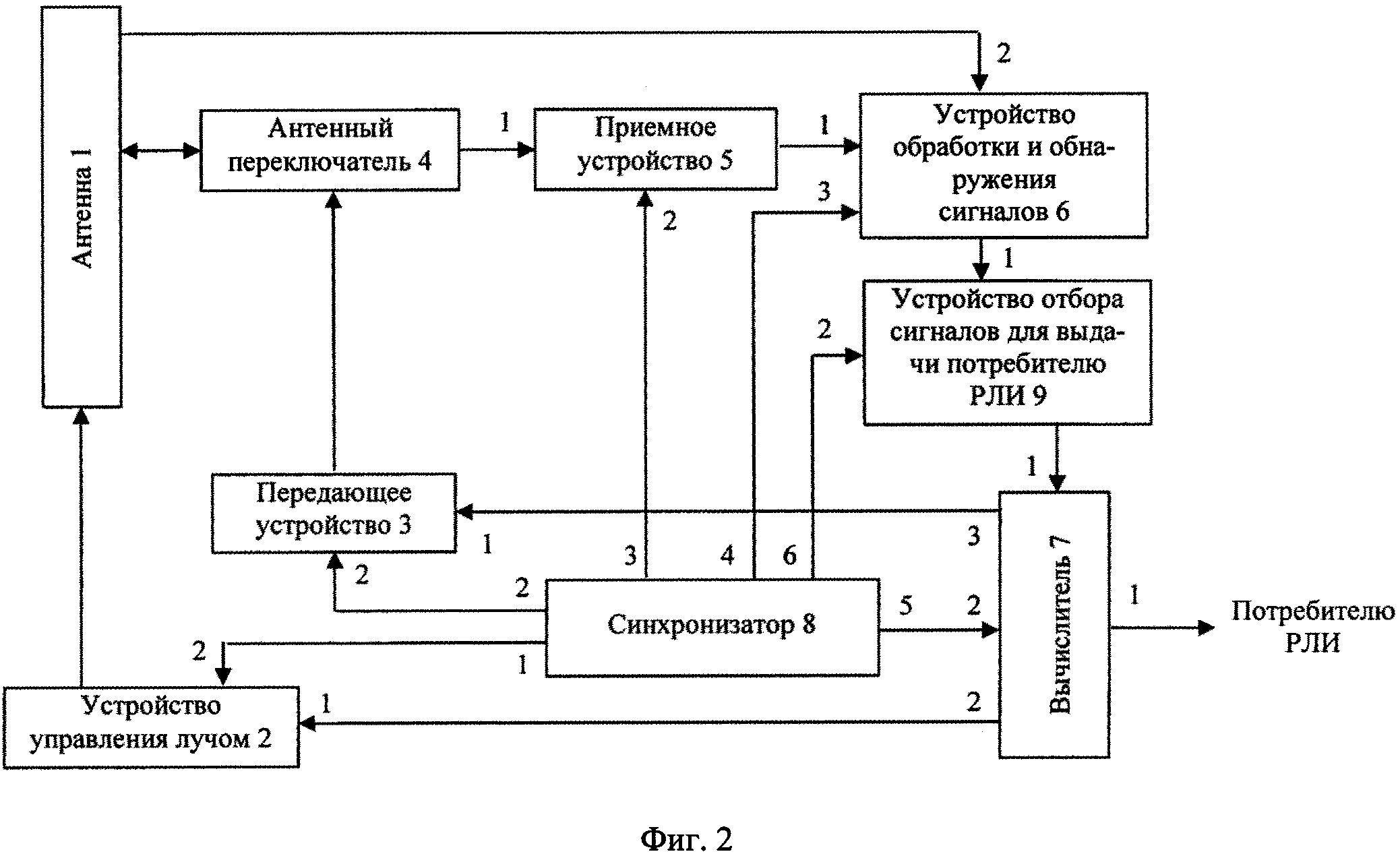
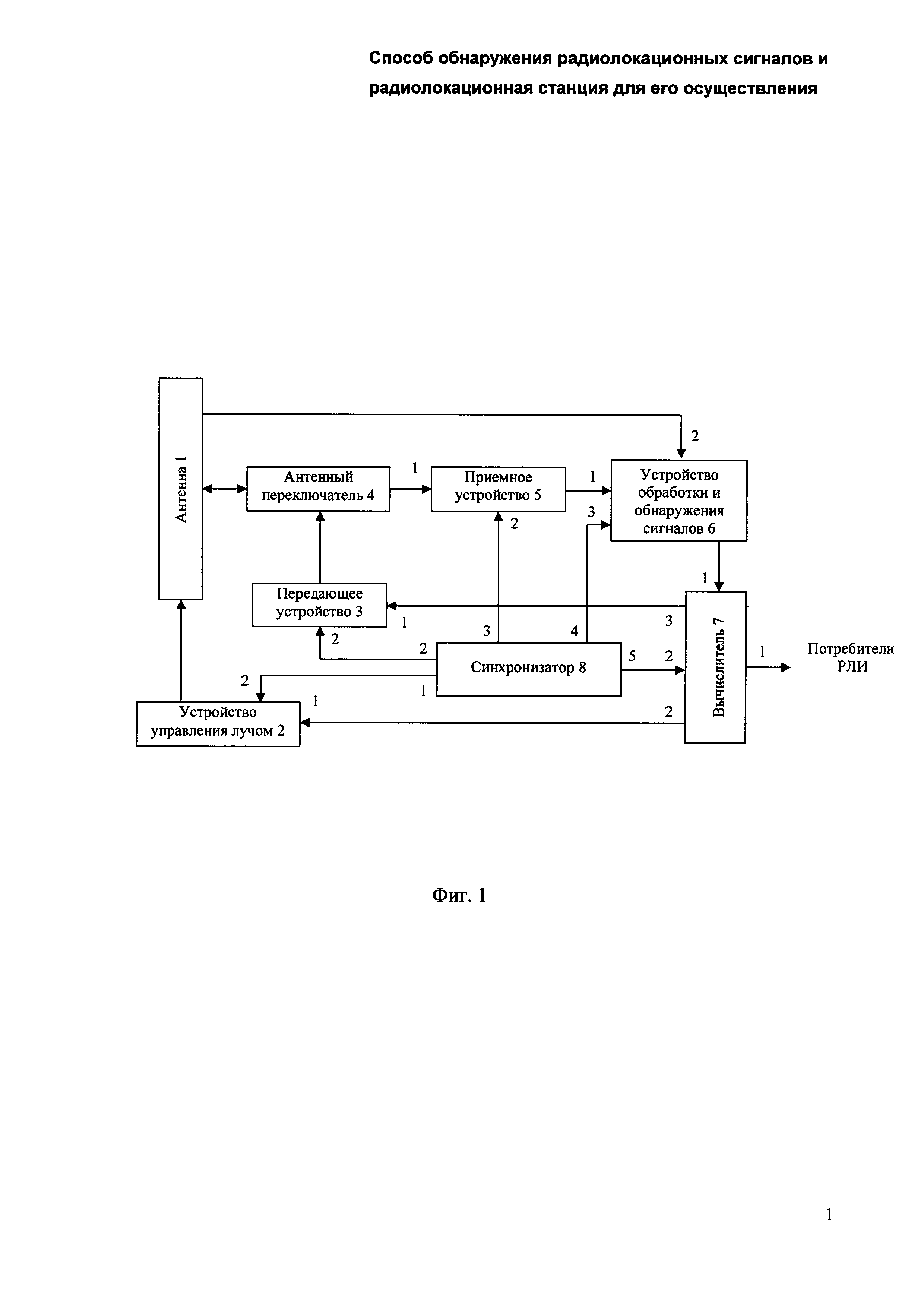
Наиболее близким к заявляемому устройству является РЛС (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. Введение в теорию. Пер. с англ. - М., 1986, с. 19), содержащая (фиг. 1) антенну 1, устройство управления лучом 2, выход которого соединен с управляющим входом антенны 1, последовательно соединенные передающее устройство 3, антенный переключатель 4, приемное устройство 5, устройство обработки и обнаружения сигналов 6 и вычислитель 7, а также синхронизатор 8, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом устройства обработки и обнаружения сигналов 6, первый выход вычислителя 7 является выходом РЛС, второй и третий выходы вычислителя 7 соединены соответственно с первым входом устройства управления лучом 2 и с первым входом передающего устройства 3, выходы синхронизатора 8 с первого по пятый соединены соответственно со вторым входом устройства управления лучом 2, вторым входом передающего устройства 3, вторым входом приемного устройства 5, с третьим входом устройства обработки и обнаружения сигналов 6 и со вторым входом вычислителя 7.
Наиболее близкое устройство работает следующим образом.
Зона обзора осматривается по программе, записанной в памяти вычислителя 7. Команды, управляющие формированием и положением луча в зоне обзора, поступают со второго выхода вычислителя 7 на первый вход устройства управления лучом 2. В этом устройстве рассчитывается распределение токов по элементам антенны 1, и в момент времени, определяемый синхроимпульсом, поступающим на второй вход устройства с первого выхода синхронизатора 8, луч устанавливается в требуемое по программе обзора направление зоны обзора.
Зондирующий сигнал формируется в передающем устройстве 3. Тип сигнала определяется командой, поступающей с третьего выхода вычислителя 7 на первый вход передающего устройства 3, а момент его излучения определяется синхроимпульсом, поступающим со второго выхода синхронизатора 8 на второй вход передающего устройства 3.
Отраженный сигнал, принятый с помощью антенны 1, через антенный переключатель 4 поступает в приемное устройство 5, где преобразуется на промежуточную частоту, фильтруется, усиливается и подается на первый вход устройства обработки и обнаружения сигналов 6, где производится череспериодная обработка сигналов, анализируются сигналы на развертке по дальности и для каждой дискреты дальности определяется порог обнаружения, с которым сравниваются сигнал. Сигналы, превысившие порог обнаружения, считаются обнаруженными и поступают на первый вход вычислителя 7.
На второй вход устройства обработки и обнаружения сигналов 6 с координатного выхода антенны 1 поступают угловые координаты луча. Одновременно с излучением зондирующего сигнала с четвертого выхода синхронизатора 8 на третий вход устройства обработки и обнаружения сигналов 6 подается импульс, от которого отсчитывается величина задержки зондирующего сигнала, и по известным формулам (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М.: Сов. Радио, 1970, с. 221) определяется дальность до цели.
Порог обнаружения в дискрете по дальности определяется путем усреднения уровней сигналов (после обработки с использованием ЧПК), принимаемых в окне по дальности, содержащем заданное количество соседних дискрет относительно дискреты, для которой определяется порог. Если сигнал в дискрете превышает вычисленный таким образом порог, то он считается отраженным от цели. Для увеличения вероятности обнаружения целей с малой ЭПР сигналы с уровнем, значительно превышающим среднее значение в окне, принимаются за сигналы от целей, минуя сравнение с порогом, и не участвуют в усреднении. Таким образом, на выходе устройства обработки и обнаружения сигналов 6 присутствуют сигналы от движущихся целей и нескомпенсированные остатки пассивных помех. При этом количество обнаруженных сигналов как в направлении луча, так и в целом за обзор не контролируется.
Наилучшие условия для обнаружения целей создаются при близких уровнях помех (гладких помехах) и превышающих их уровнях сигналов от целей. В этом случае большая часть помех оказывается ниже порогов обнаружения и не обнаруживается. Эти условия обеспечиваются также при наличии в обработке ЧПК, когда неподвижные пассивные помехи в виде отражений от подстилающей поверхности, местных предметов, эффективно компенсируются, а сигналы от движущихся целей изменяются незначительно, поэтому превышают уровни порогов и обнаруживаются.
Однако в условиях существенно неоднородных пассивных помех при отсутствии ЧПК, а также при наличии ЧПК, но при помехах в виде движущихся под действием ветра пассивных отражателей, таких как метеообразования, искусственные отражатели, сигналы от которых не могут быть полностью скомпенсированы ЧПК, потребителю РЛИ вместе с сигналами от целей выдаются помехи.
Выделение целей среди помех в дальнейшем осуществляется потребителем РЛИ, например, методами вторичной обработки. Но, поскольку количество сигналов, обнаруженных в каждом направлении луча и в целом за обзор не контролируется и не ограничивается, количество сигналов, поступающих потребителю РЛИ, может превысить допустимое, при котором потребитель в состоянии осуществить вторичную обработку поступающей РЛИ. В этом случае происходит перегрузка системы обработки РЛИ, что может привести к срыву выполнения РЛС боевой задачи. Это является недостатком наиболее близких технических решений.
Решаемой задачей (техническим результатом), таким образом, является защита потребителя РЛИ от перегрузки за счет ограничения количества выдаваемых ему обнаруженных сигналов без существенных потерь в обнаружении целей.
Технический результат достигается тем, что в способе обнаружения радиолокационных сигналов, включающем излучение зондирующих сигналов в зоне обзора РЛС, обработку и обнаружение принятых сигналов, запоминание уровней и координат обнаруженных сигналов, выдачу обнаруженных сигналов потребителю РЛИ, согласно изобретению, на каждом обзоре подсчитывают количество обнаруженных в зоне обзора сигналов, сигналы для выдачи потребителю РЛИ на текущем обзоре выбирают по результатам обнаружения на предыдущем обзоре следующим образом:
а) если на предыдущем обзоре количество обнаруженных сигналов не превышает количество, заданное потребителем РЛИ, то на текущем обзоре потребителю РЛИ выдают все обнаруженные сигналы;
б) если на предыдущем обзоре количество обнаруженных сигналов превышает количество, заданное потребителем РЛИ, то обнаруженные на текущем обзоре сигналы для передачи потребителю РЛИ отбирают в следующей последовательности:
- уровни обнаруженных на предыдущем обзоре сигналов пересчитывают в соответствии с заранее заданной математической формулой:

где  - приведенное к опорной дальности Rоп значение уровня сигнала (квадрата огибающей амплитуды) в i-й дискрете по дальности в j-м направлении луча в зоне обзора, i=1,…,М, где М - количество дискрет по дальности, j=1,…, N, где N - количество направлений луча в зоне обзора;
- приведенное к опорной дальности Rоп значение уровня сигнала (квадрата огибающей амплитуды) в i-й дискрете по дальности в j-м направлении луча в зоне обзора, i=1,…,М, где М - количество дискрет по дальности, j=1,…, N, где N - количество направлений луча в зоне обзора;
Rоп - опорная дальность, к которой пересчитывают (приводят) уровни обнаруженных на предыдущем обзоре сигналов, выбирают равной половине инструментальной дальности РЛС;
 - уровень обнаруженного сигнала (квадрат огибающей амплитуды) в i-й дискрете по дальности в j-м направлении луча в зоне обзора;
- уровень обнаруженного сигнала (квадрат огибающей амплитуды) в i-й дискрете по дальности в j-м направлении луча в зоне обзора;
Rij - дальность до отражателя обнаруженного сигнала, соответствующая i-й дискрете по дальности в j-м направлении луча в зоне обзора;
 - функция, описывающая зависимость уровня сигнала на опорной дальности Rоп от его уровня на дальности Rij и от величины опорной дальности Rоп;
- функция, описывающая зависимость уровня сигнала на опорной дальности Rоп от его уровня на дальности Rij и от величины опорной дальности Rоп;
- сигналы, обнаруженные на предыдущем обзоре, упорядочивают по убыванию приведенного значения уровня и из полученного ряда в качестве порогового значения выбирают значение уровня  сигнала с порядковым номером, равным заданному потребителем РЛИ количеству обнаруженных сигналов;
сигнала с порядковым номером, равным заданному потребителем РЛИ количеству обнаруженных сигналов;
- для каждого обнаруженного на текущем обзоре сигнала вычисляют приведенное к той же величине опорной дальности Rоп значение уровня по математической формуле (1) и сравнивают его с выбранным пороговым значением  принимают решение о передаче обнаруженного сигнала потребителю РЛИ, если приведенный уровень сигнала не менее порогового значения
принимают решение о передаче обнаруженного сигнала потребителю РЛИ, если приведенный уровень сигнала не менее порогового значения 
Технический результат достигается также тем, что функция  в математической формуле (1) имеет вид:
в математической формуле (1) имеет вид:

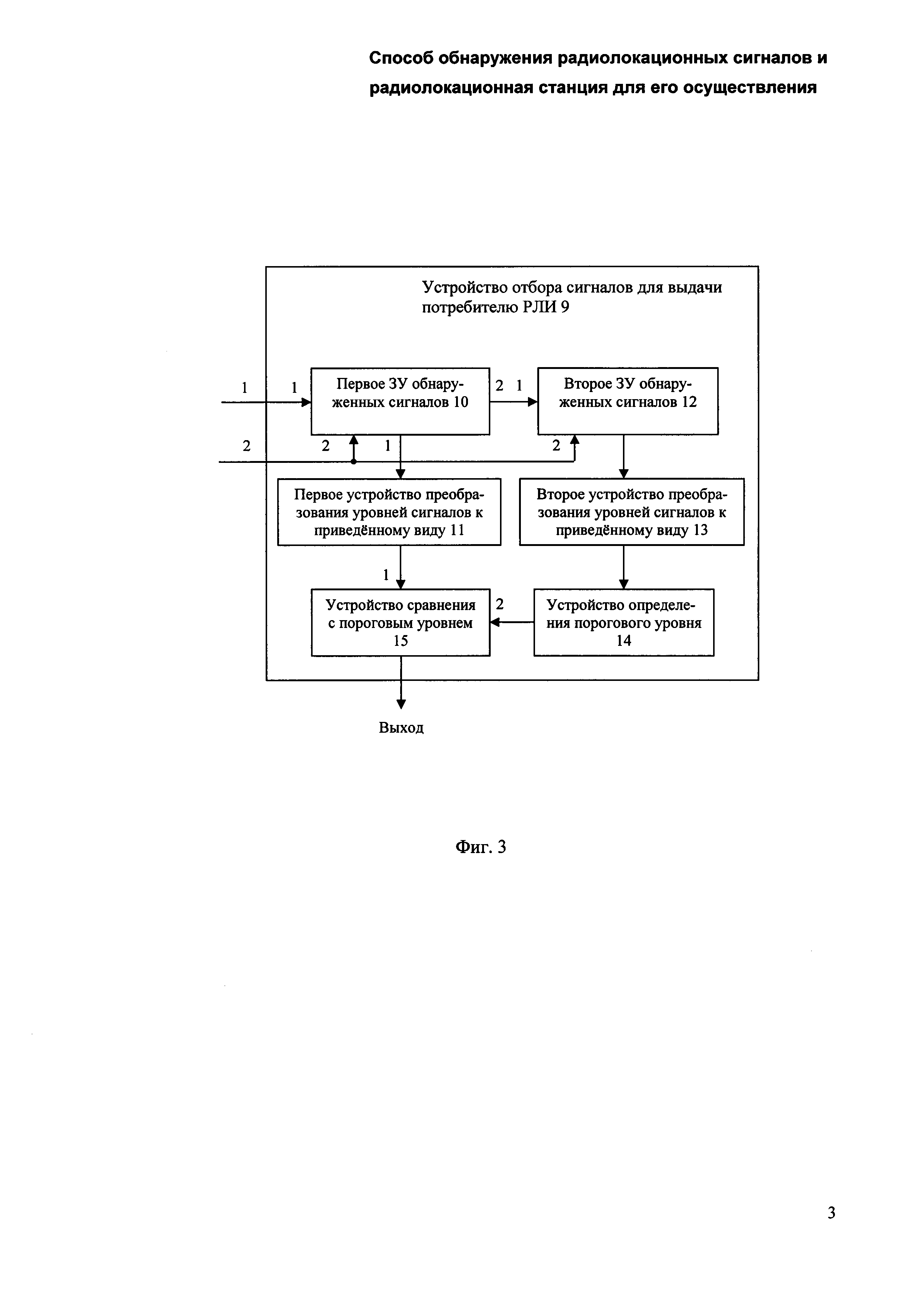
Технический результат достигается также тем, что в РЛС, содержащей антенну, устройство управления лучом, выход которого соединен с управляющим входом антенны, последовательно соединенные передающее устройство, антенный переключатель, приемное устройство, устройство обработки и обнаружения сигналов, а также вычислитель и синхронизатор, при этом сигнальный вход/выход антенны соединен со входом/выходом антенного переключателя, а координатный ее выход - со вторым входом устройства обработки и обнаружения сигналов, первый выход вычислителя является выходом РЛС, второй и третий выходы вычислителя соединены соответственно с первым входом устройства управления лучом и с первым входом передающего устройства, выходы синхронизатора с первого по пятый соединены соответственно со вторым входом устройства управления лучом, вторым входом передающего устройства, вторым входом приемного устройства, с третьим входом устройства обработки и обнаружения сигналов и со вторым входом вычислителя, согласно изобретению, введено устройство отбора сигналов для выдачи потребителю РЛИ, первый вход которого соединен с выходом устройства обработки и обнаружения сигналов, второй вход - с шестым выходом синхронизатора, а выход соединен с первым входом вычислителя, при этом устройство отбора сигналов для выдачи потребителю РЛИ содержит первое запоминающее устройство (ЗУ) обнаруженных сигналов, первый выход которого соединен со входом первого устройства преобразования уровней сигналов к приведенному виду, а второй его выход соединен с последовательно соединенными вторым ЗУ обнаруженных сигналов, вторым устройством преобразования уровней сигналов к приведенному виду и устройством определения порогового уровня, а также устройство сравнения с пороговым уровнем, первый вход которого соединен с выходом первого устройства преобразования уровней сигналов к приведенному виду, а второй - с выходом устройства определения порогового уровня, вход первого ЗУ обнаруженных сигналов является первым входом устройства отбора сигналов для выдачи потребителю РЛИ, выход устройства сравнения с пороговым уровнем является выходом этого устройства.
Суть заявляемых технических решений заключается в следующем.
Сигналы, выдаваемые потребителю РЛИ в известных технических решениях, представляют собой сигналы (от целей и остатки пассивных помех) на выходе ЧПК, поэтому к ним могут быть применены два следующих положения:
- наибольшие вероятности того, что обнаруженные в зоне обзора сигналы принадлежат целям, имеют наиболее мощные сигналы; это положение использовано в наиболее близких технических решениях, оно обеспечивает минимальные потери в обнаружении целей;
- уровни принимаемых сигналов от целей и помех, их количество и координаты от обзора к обзору изменяются незначительно; это положение подтверждается практически, оно обеспечивает возможность определить на предыдущем обзоре пороговый уровень сигнала для текущего обзора.
При выборе сигналов для передачи потребителю РЛИ исходят из наибольшего их количества, которое может быть обработано потребителем РЛИ. Эта величина задается потребителем РЛИ. Выбор сигналов для передачи потребителю РЛИ на текущем обзоре осуществляется по результатам анализа сигналов, обнаруженных на предыдущем обзоре, следующим образом.
На каждом обзоре подсчитывается количество обнаруженных сигналов.
Если количество сигналов, обнаруженных на предыдущем обзоре, не превышает значение, заданное потребителем РЛИ, то на текущем обзоре потребителю РЛИ выдают все обнаруженные сигналы.
Если количество сигналов, обнаруженных на предыдущем обзоре, превышает заданное потребителем РЛИ, то из обнаруженных на текущем обзоре сигналов для передачи потребителю РЛИ отбираются сигналы, которые с наибольшей вероятностью являются сигналами от целей. Указанный отбор осуществляется в следующей последовательности.
1. Для каждого сигнала, обнаруженного на предыдущем обзоре, вычисляется приведенное к пороговой дальности Rоп значение его уровня по математической формуле (1).
Опорная дальность Rоп взята равной половине инструментальной дальности РЛС. Хотя выбор опорной дальности не является принципиальным, указанная ее величина для большинства целей соответствует достаточно высокому уровню обнаруженного сигнала, что обеспечивает необходимую достоверность получаемых в соответствии с формулой (1) значений приведенных к величине Rоп уровней обнаруженных сигналов.
Относительная произвольность выбора величины опорной дальности Rоп объясняется тем, что при определении порогового уровня передаваемых потребителю РЛИ сигналов, а также при отборе сигналов для передачи потребителю РЛИ осуществляется упорядочивание сигналов, для чего проводится сравнение их уровней между собой. Абсолютные значения уровней сигналов при этом не важны. Требуется лишь неизменность величины Rоп от обзора к обзору.
Математическая формула (1), по которой пересчитываются уровни обнаруженных на предыдущем обзоре сигналов  к опорной дальности Rоп, представлена в общем виде. Конкретный вид этой формулы определяется имеющимися в РЛС устройствами обработки сигнала.
к опорной дальности Rоп, представлена в общем виде. Конкретный вид этой формулы определяется имеющимися в РЛС устройствами обработки сигнала.
Так, например, если при обработке сигнала вид зависимости уровня отраженного сигнала от дальности на всей ее развертке не изменяется, то формула (1) имеет вид (2) (Справочник по радиолокации. Под ред. М.И. Сколника, т.1. - М., «Сов. радио», 1976, с. 28).
2. Сигналы предыдущего обзора упорядочиваются по убыванию приведенного значения уровня, и из полученного ряда в качестве порогового значения выбирают значение уровня  сигнала с порядковым номером, равным заданному потребителем РЛИ количеству обнаруженных сигналов. Пороговое значение
сигнала с порядковым номером, равным заданному потребителем РЛИ количеству обнаруженных сигналов. Пороговое значение  используется на текущем обзоре.
используется на текущем обзоре.
3. На текущем обзоре по мере обнаружения сигналов по той же математической формуле (1) вычисляются приведенные значения их уровней и сравниваются с пороговым значением  при этом если приведенный уровень сигнала не менее порогового значения
при этом если приведенный уровень сигнала не менее порогового значения  то сигнал вместе с соответствующими координатами выдается потребителю РЛИ.
то сигнал вместе с соответствующими координатами выдается потребителю РЛИ.
Важно отметить, что заявляемые технические решения могут быть применены как во всей зоне обзора РЛС, так и в пределах заранее заданных границ.
Таким образом, заявляемые технические решения позволяют ограничить количество сигналов, передаваемых потребителю РЛИ, при этом сигналы передаются по мере их обнаружения, то есть без задержки, и без существенных потерь в обнаружении целей. Таким образом достигается заявляемый технический результат.
Изобретения иллюстрируются следующими чертежами.
Фиг. 1 - функциональная схема наиболее близкой РЛС.
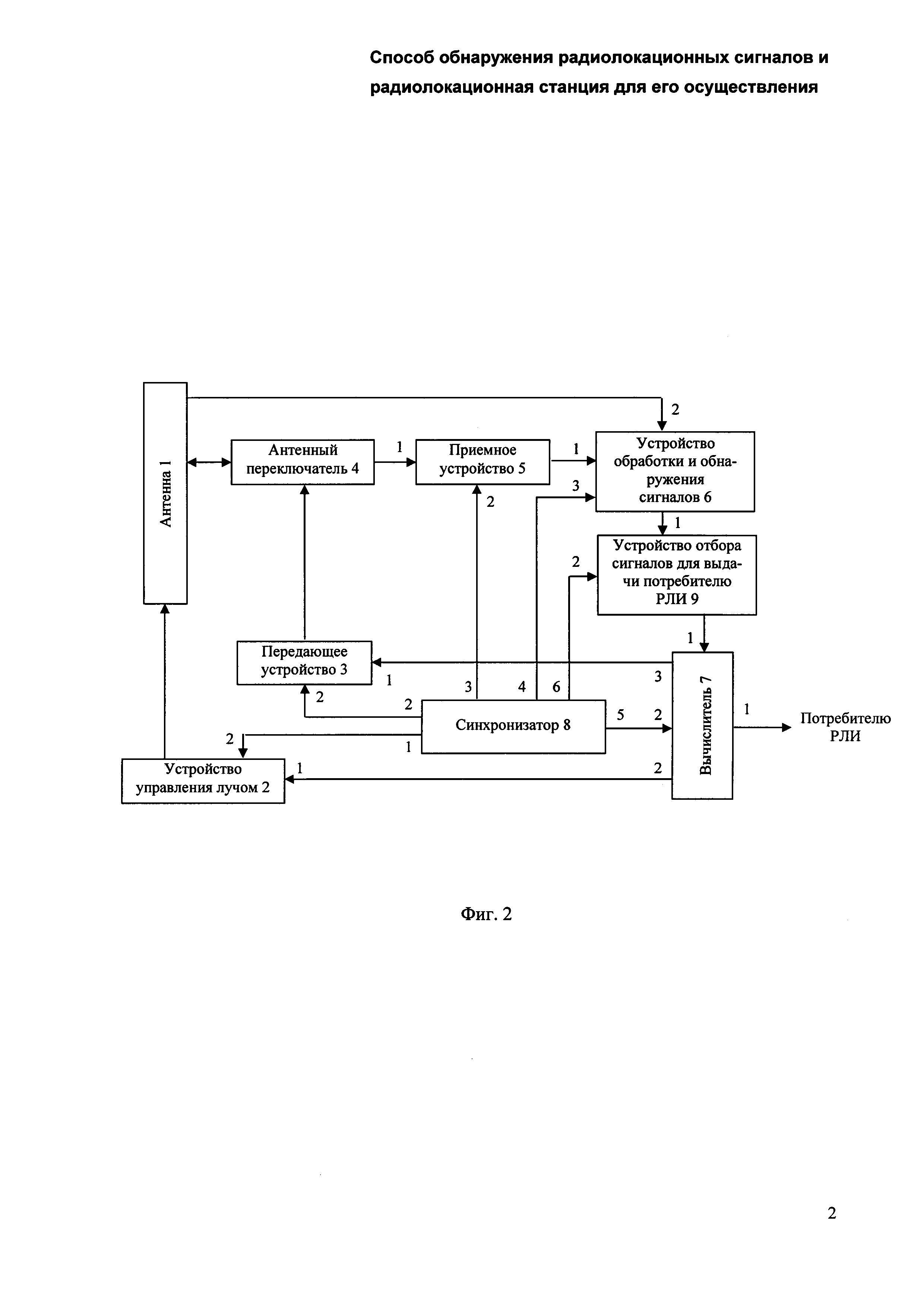
Фиг. 2 - функциональная схема заявляемой РЛС.
Фиг. 3 - функциональная схема устройства отбора сигналов для выдачи потребителю РЛИ.
Заявляемая РЛС, реализующая заявляемый способ, содержит (фиг. 2) антенну 1, устройство управления лучом 2, выход которого соединен с управляющим входом антенны 1, последовательно соединенные передающее устройство 3, антенный переключатель 4, приемное устройство 5, устройство обработки и обнаружения сигналов 6, устройство отбора сигналов для выдачи потребителю РЛИ 9, вычислитель 7, а также синхронизатор 8, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом устройства обработки и обнаружения сигналов 6, первый выход вычислителя 7 является выходом РЛС, второй и третий его выходы соединены соответственно с первым входом устройства управления лучом 2 и первым входом передающего устройства 3, выходы синхронизатора 8 с первого по шестой соединены соответственно со вторым входом устройства управления лучом 2, вторым входом передающего устройства 3, вторым входом приемного устройства 5, с третьим входом устройства обработки и обнаружения сигналов 6, вторым входом вычислителя 7 и вторым входом устройства отбора сигналов для выдачи потребителю РЛИ 9, устройство отбора сигналов для выдачи потребителю РЛИ 9 содержит (фиг. 3) первое ЗУ обнаруженных сигналов 10, первый выход которого соединен со входом первого устройства преобразования уровней сигналов к приведенному виду 11, а второй его выход соединен с последовательно соединенными вторым ЗУ обнаруженных сигналов 12, вторым устройством преобразования уровней сигналов к приведенному виду 13 и устройством определения порогового уровня 14, а также устройство сравнения с пороговым уровнем 15, первый вход которого соединен с выходом первого устройства преобразования уровней сигналов к приведенному виду 11, а второй - с выходом устройства определения порогового уровня 14, вход первого ЗУ обнаруженных сигналов 10 является первым входом устройства отбора сигналов для выдачи потребителю РЛИ 9, выход устройства сравнения с пороговым уровнем 15 является выходом устройства 9.
РЛС может быть выполнена с использованием следующих функциональных элементов.
Антенна 1 - одномерная ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: Сов. радио, 1977, с. 138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний элементов ФАР и формирования луча в заданном направлении (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: Сов. радио, 1977, с. 141-143).
Передающее устройство 3 - многокаскадный импульсный передатчик на клистроне (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с. 278-279, рис. 7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с. 166-168).
Приемное устройство 5 - супергетеродинный приемник (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с. 343-344, рис. 8.1).
Устройство обработки и обнаружения сигналов 6 - выполнено в соответствии с патентом РФ №2411535.
Вычислитель 7 - цифровой вычислитель, реализующий операции определения порядка осмотра зоны обзора и выбора типа сигналов в соответствии с заданной программой, а также преобразования сигналов, выдаваемых потребителю РЛИ, в требуемый формат (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Синхронизатор 8 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, с. 602-603).
Устройство отбора сигналов для выдачи потребителю РЛИ 9 может быть выполнено с использованием следующих элементов.
Первое ЗУ обнаруженных сигналов 10, второе ЗУ обнаруженных сигналов 12 - запоминающие устройства (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Первое устройство преобразования уровней сигналов к приведенному виду 11, второе устройство преобразования уровней сигналов к приведенному виду 13 - цифровые вычислители, реализующие преобразования уровней сигналов в соответствии с математической формулой (1) (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Устройство определения порогового уровня 14 - цифровой вычислитель, реализующий операцию упорядочивания сигналов по убыванию приведенного значения уровня и выбора из полученного ряда в качестве порогового значения значение уровня сигнала с порядковым номером, равным заданному потребителем РЛИ количеству обнаруженных сигналов (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Устройство сравнения с пороговым уровнем 15 - цифровой вычислитель, реализующий операции упорядочивания уровней сигналов по убыванию и сравнения их с пороговым значением , принятия решения об обнаружении сигналов, если их уровни не менее порогового значения (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Рассмотрим работу заявляемой РЛС, реализующей заявляемый способ (фиг. 2).
Зона обзора осматривается в соответствии с программой обзора, хранящейся в памяти вычислителя 7. Синхронизатор 8 обеспечивает согласованную работу устройств РЛС путем выдачи соответствующих синхроимпульсов.
Команды управления лучом при осмотре зоны поступают со второго выхода вычислителя 7 на первый вход устройства управления лучом 2. По сигналам устройства управления лучом 2 осуществляется перемещение луча антенны 1 в зоне обзора.
Зондирующий сигнал формируется в передающем устройстве 3. Тип зондирующего сигнала определяется командой, поступающей с третьего выхода вычислителя 7 на первый вход передающего устройства 3, а момент его излучения определяется синхроимпульсом, поступающим со второго выхода синхронизатора 8 на второй вход передающего устройства 3.
Отраженный сигнал, принятый с помощью антенны 1, через антенный переключатель 4 поступает в приемное устройство 5, где преобразуется на промежуточную частоту, фильтруется, усиливается и подается на первый вход устройства обработки и обнаружения сигналов 6, где производится череспериодная компенсация сигналов, анализируются уровни сигналов на развертке по дальности, и на основании анализа для каждой дискреты дальности определяется порог обнаружения, с которым сравнивается сигнал этой дискреты (патент РФ №2411535). Сигналы, превысившие пороги обнаружения, считаются обнаруженными и вместе с угловыми координатами (угол места и азимут), поступающими с координатного выхода антенны 1 на второй вход устройства обработки и обнаружения сигналов 6, и дальностями, рассчитанными в этом устройстве по величине задержки зондирующего сигнала (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М.: Сов. Радио, 1970, с. 221), подаются на первый вход устройства отбора сигналов для выдачи потребителю РЛИ 9.
В устройстве отбора сигналов для выдачи потребителю РЛИ 9 по окончании каждого осмотра зоны обзора в первом ЗУ обнаруженных сигналов 10 оказываются записанными данные текущего обзора, во втором ЗУ обнаруженных сигналов 12 - данные предыдущего обзора. Записанные в указанных ЗУ данные поступают соответственно в первое (11) и второе (13) устройства преобразования уровней сигналов к приведенному виду, где они преобразуются в соответствии с формулой (1) и подаются на вход устройства определения порогового уровня 14 и вход устройства сравнения с пороговым уровнем 15 соответственно.
В устройстве определения порогового уровня 14 сигналы предыдущего обзора упорядочиваются по убыванию приведенного значения уровня и из полученного ряда в качестве порогового значения выбирается значение уровня сигнала с порядковым номером, равным заданному потребителем РЛИ количеству обнаруженных сигналов.
В устройстве сравнения с пороговым уровнем 15 приведенные значения уровней сигналов текущего обзора по мере их поступления с выхода первого устройства преобразования уровней сигналов к приведенному виду 11 сравниваются с пороговым значением уровня  поступившим с выхода устройства определения порогового уровня 14. Сигналы, приведенные уровни которых равны или превышают пороговое значение
поступившим с выхода устройства определения порогового уровня 14. Сигналы, приведенные уровни которых равны или превышают пороговое значение  вместе с их координатами с выхода устройства сравнения с пороговым уровнем 15 подаются на выход устройства отбора сигналов для выдачи потребителю РЛИ 9 и далее - на вход вычислителя 7, где преобразуются в требуемый формат и выдаются потребителю РЛИ.
вместе с их координатами с выхода устройства сравнения с пороговым уровнем 15 подаются на выход устройства отбора сигналов для выдачи потребителю РЛИ 9 и далее - на вход вычислителя 7, где преобразуются в требуемый формат и выдаются потребителю РЛИ.
Таким образом, в заявляемой РЛС, реализующей заявляемый способ, достигается заявляемый технический результат.






Способ измерения угловых координат цели
Способ защиты обзорной радиолокационной станции с фазированной антенной решеткой от помех (варианты)
Способ защиты от пассивных помех и радиолокационная станция для его осуществления
Способ пеленгации постановщика активных помех
Способ радиолокационного обзора
Способ радиолокационного обзора пространства (варианты)
Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления
Способ радиолокационного обзора пространства
Способ сопровождения цели обзорной радиолокационной станцией (варианты)
Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты)
Способ измерения угловых координат цели
Способ защиты обзорной радиолокационной станции с фазированной антенной решеткой от помех (варианты)
Способ защиты от пассивных помех и радиолокационная станция для его осуществления
Способ пеленгации постановщика активных помех
Способ радиолокационного обзора
Способ радиолокационного обзора пространства (варианты)
Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления
Способ радиолокационного обзора пространства
Способ измерения угловых координат цели
Способ распознавания отраженных сигналов от цели и сигналов ответной импульсной помехи

