Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ ДАТЧИКА ВОЗДУХА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области обработки воздуха, в частности, к способу калибровки датчика воздуха устройства обработки воздуха.
УРОВЕНЬ ТЕХНИКИ
Урбанизация и индустриализация приводят к загрязнению воздуха в крупных городах, в частности, в развивающихся странах. Для очистки воздуха, для улучшения качества воздуха в домах, офисах и автомобилях широко используются устройства обработки воздуха.
Индикатор качества воздуха обычно интегрирован в устройстве обработки воздуха и предоставляет пользователю показатель качества воздуха. Таким образом, устройство обработки воздуха может дополнительно содержать датчик воздуха и процессор. Датчик воздуха измеряет качество воздуха и выдает измерительный выходной сигнал, и затем процессор считывает измерительный выходной сигнал датчика воздуха и управляет индикатором качества воздуха для предоставления показателя для пользователя на основе измерительного выходного сигнала датчика воздуха. Однако в измерительном выходном сигнале датчика воздуха с течением времени может происходить дрейф, и сам датчик воздуха также может проявлять несоответствие между измерениями, даже в той же самой группе измерений, в результате чего индикатор качества воздуха может представлять неправильные показания для пользователя; следовательно, пользователю трудно проверять, действительно ли улучшилось качество воздуха внутри помещения, что вызывает беспокойство и может уменьшить доверие людей к устройству обработки воздуха.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Обычно для калибровки датчика воздуха используют нулевой воздух. Однако, каждый раз, когда датчик воздуха устройства обработки воздуха требуется откалибровать, пользователь должен приложить усилия, чтобы найти нулевой воздух для выполнения калибровки, что является довольно неудобным.
С учетом представленных выше проблем было бы предпочтительно предложить способ калибровки датчика воздуха устройства обработки воздуха, в котором чистый воздух, то есть нулевой воздух, для калибровки датчика воздуха, можно было бы формировать локально посредством устройства обработки воздуха. И также было бы желательно получить устройство обработки воздуха, датчик воздуха которого можно было бы калибровать, используя чистый воздух, то есть, нулевой воздух, формируемый локально посредством устройства обработки воздуха.
Для лучшего решения представленной выше задачи, в соответствии с одним вариантом осуществления изобретения, предложено устройство обработки воздуха, содержащее:
модуль очистки воздуха, выполненный с возможностью очистки воздуха;
датчик воздуха, выполненный с возможностью измерения первого количества воздуха и выдачи измерительного выходного сигнала, в котором первое количество воздуха содержит очищенный воздух, который был очищен модулем очистки воздуха; и
процессор, выполненный с возможностью генерирования первого значения на основе измеренного выхода датчика воздуха для калибровки датчика воздуха.
В варианте осуществления первое количество воздуха представляет собой очищенный воздух, и затем устройство обработки воздуха, дополнительно содержащее:
переключатель, расположенный между датчиком воздуха и модулем очистки воздуха;
при этом процессор дополнительно выполнен с возможностью открывания или закрывания переключателя для обеспечения потока очищенного воздуха к датчику воздуха или блокирования потока очищенного воздуха к датчику воздуха.
В другом варианте осуществления первое количество воздуха представляет собой смесь окружающего воздуха и очищенного воздуха, и устройство обработки воздуха расположено в воздухонепроницаемом пространстве, и процессор, кроме того, выполнен с возможностью определения, удовлетворяет ли качество первого количества воздуха в воздухонепроницаемом пространстве заданному критерию, и генерирования первого значения на основе измерительного выходного сигнала датчика воздуха, если качество первого количества воздуха удовлетворяет заданному критерию.
При использовании устройства обработки воздуха в соответствии с одним вариантом осуществления изобретения, чистый воздух, то есть нулевой воздух, формируют локально посредством устройства обработки воздуха для калибровки датчика воздуха, без необходимости внешнего формирования нулевого воздуха, что обеспечивает удобство для пользователя или других операторов, выполняющих калибровку датчика воздуха устройства обработки воздуха. Кроме того, по мере того, как измерительный выходной сигнал датчика воздуха калибруют, показатель качества воздуха, предоставляемого пользователю, становится точным.
В соответствии с другим вариантом осуществления изобретения предусмотрен способ калибровки датчика воздуха для устройства обработки воздуха, способ, включающий в себя этапы, на которых:
очищают воздух посредством использования устройства обработки воздуха; и
измеряют первое количество воздуха, используя датчик воздуха для получения первого значения для калибровки датчика воздуха, причем первое количество воздуха содержит очищенный воздух.
Эти и другие аспекты изобретения будут понятны из пояснения со ссылкой на приложенные варианты осуществления, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Представленные выше и другие задачи и свойства настоящего изобретения будут более понятны из следующего подробного описания изобретения, рассматриваемого совместно с приложенными чертежами, на которых:
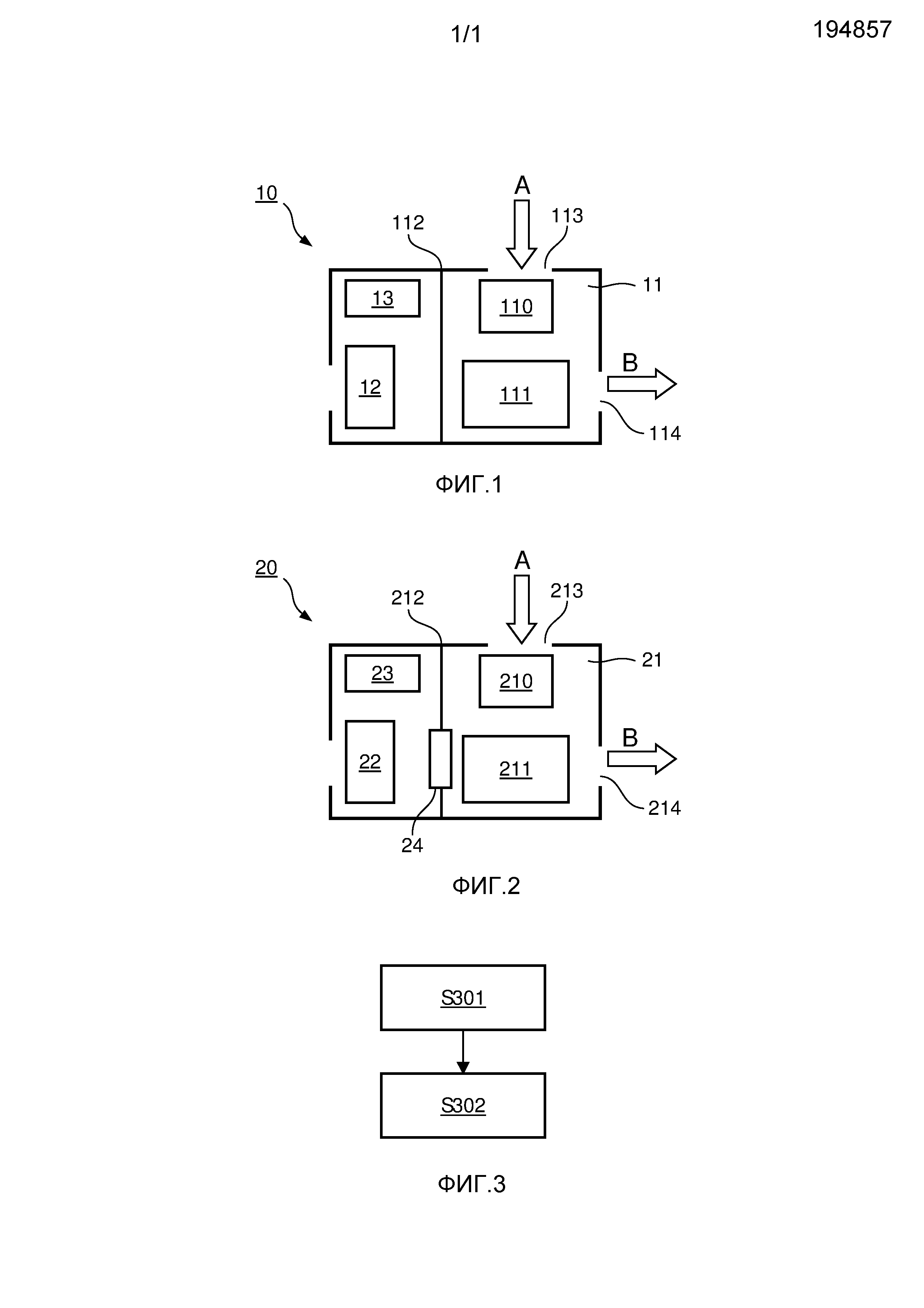
на фиг. 1 представлено примерное устройство 10 обработки воздуха в соответствии с одним вариантом осуществления изобретения;
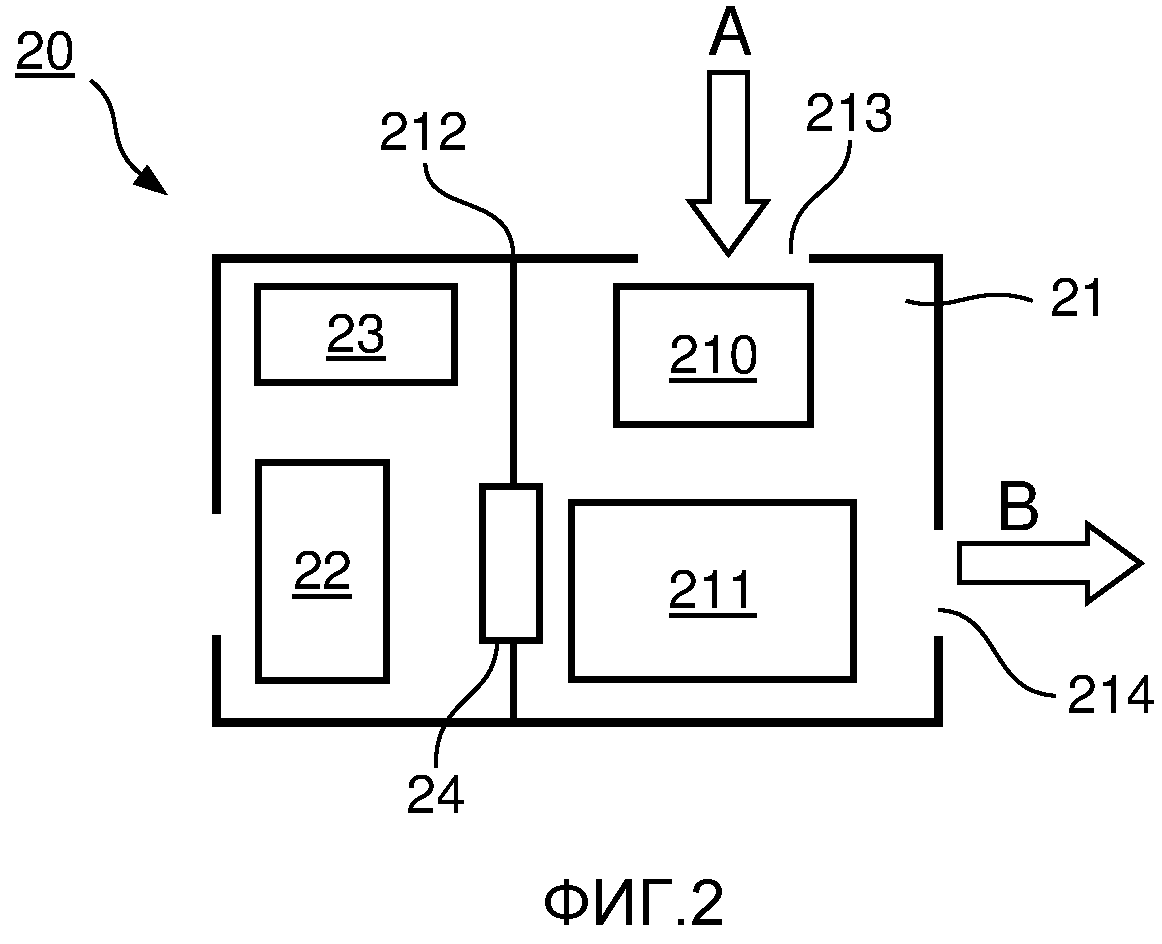
на фиг. 2 представлено примерное устройство 20 обработки воздуха в соответствии с другим вариантом осуществления изобретения;
на фиг. 3 представлена блок-схема последовательности операций способа калибровки датчика воздуха устройства обработки воздуха в соответствии с одним вариантом осуществления изобретения.
Одинаковые номера ссылочных позиций используются для обозначения одинаковых элементов на всех чертежах.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 представлен пример устройства 10 обработки воздуха в соответствии с одним вариантом осуществления изобретения. Устройство 10 обработки воздуха может, в общем, использоваться для очистки воздуха в домах, офисах, автомобилях и в других (общественных) местах. Как показано на фиг. 1, устройство 10 обработки воздуха содержит модуль 11 очистки воздуха, датчик 12 воздуха и процессор 13.
Модуль 11 очистки воздуха может принимать любую конфигурацию, но, в общем, содержит средство 110 фильтрации и электродвигатель 111, как показано на фиг. 1. Средство 110 фильтрации, в общем, может содержать, например, модуль фильтрации частиц для фильтрации частиц, таких как пыль, из пропускаемого воздуха и, например, модуль фильтрации газа для фильтрации газов, таких как химические газы, из пропускаемого воздуха. Электродвигатель 111 выполнен с возможностью осуществления пропускания воздуха, предназначенного для очистки, через средство 110 фильтрации и может быть выполнен, например, как обратная крыльчатка. Модуль 11 очистки воздуха может дополнительно содержать корпус 112, содержащий впускную область 113 и выпускную область 114, соответственно, выполненные с возможностью осуществления пропускания воздуха, предназначенного для очистки, для его ввода (обозначен стрелкой A) и вывода (обозначен стрелкой B) из модуля 11 очистки воздуха. Средство 110 фильтрации и электродвигатель 111 оба могут быть закрыты внутри корпуса 112, как показано на фиг. 1.
Датчик 12 воздуха может быть выполнен в любой форме датчика, который пригоден для измерения качества воздуха, например, как датчик частиц или датчик газа. Датчик 12 воздуха выполнен с возможностью измерения качества воздуха и выдачи измерительного выходного сигнала в процессор 13, который может представлять собой, например, модуль микроконтроллера (MCU, ММК).
В нормальном режиме работы, после того, как устройство 10 обработки воздуха, установленное, например, в автомобиле, будет включено, электродвигатель 111 начинает всасывать окружающий воздух, присутствующий в кабине автомобиля, в модуль 11 очистки воздуха через область 113 входного отверстия. Окружающий воздух затем проходит через средство 110 фильтрации, которое фильтрует, например, пыль и химические газы из проходящего окружающего воздуха, и затем очищенный воздух выходит из модуля 11 очистки воздуха через область 114 выходного отверстия и смешивается с окружающим воздухом в кабине. Описанный выше процесс повторяется в течение нормального рабочего режима устройства 10 обработки воздуха для очистки воздуха в кабине.
Датчик 12 воздуха измеряет качество воздуха в кабине и выдает измерительный выходной сигнал. Процессор 13 считывает измерительный выходной сигнал датчика 12 воздуха и затем выдает показатель качества воздуха для пользователя на основе измерительного выходного сигнала датчика 12 воздуха. Индикатор качества, например один светодиод или массив светодиодов, может быть установлен в устройстве 10 обработки воздуха для выдачи показателя качества воздуха. Когда процессор 13 считывает измерительный выходной сигнал датчика 12 воздуха, он может сравнивать измерительный выходной сигнал датчика 12 воздуха с заданным пороговым значением, и затем может управлять светодиодом для включения зеленого света, что обозначает, что качество воздуха является хорошим, если измерительный выходной сигнал датчика 12 воздуха, например, не превышает заданный порог, или может управлять светодиодом, чтобы включить красный свет, что обозначает, что качество воздуха является плохим, если измерительный выходной сигнал датчика воздуха 12, например, превышает заданное пороговое значение. Следует понимать, что больше, чем одно пороговое значение может быть определено для определения качества воздуха, и в этом отношении светодиодом можно управлять для получения больше чем двух цветов, для предоставления показателя разных уровней качества воздуха.
Когда датчик 12 воздуха устройства 10 обработки воздуха требуется откалибровать, например, из-за смещения измерительного выходного сигнала датчика 12 воздуха с течением времени, что приводит к неточным показаниям качества воздуха, устройство 10 обработки воздуха переходит в режим калибровки.
В одном варианте осуществления устройство 10 обработки воздуха может содержать пользовательский интерфейс, и режим калибровки может быть активирован, когда принимают инструкцию через пользовательский интерфейс, например, когда нажимают кнопку калибровки на устройстве 10 обработки воздуха. В качестве альтернативы, режим калибровки может быть активирован автоматически, например, периодически, без необходимости получения инструкции от пользователя или других операторов.
Предпочтительно режим калибровки может быть активирован после промывки и замены средства 110 фильтрации модуля 11 очистки воздуха.
Когда активируется режим калибровки, модуль 11 очистки воздуха устройства 10 обработки воздуха начинает очищать воздух в кабине. Как описано выше, в нормальном режиме работы, окружающий воздух в кабине засасывают в модуль 11 очистки воздуха через впускную область 113 посредством электродвигателя 111 и его пропускают через средство 110 фильтрации, и затем очищенный воздух выходит через модуль 11 очистки воздуха, через выпускную область 114 и смешивается с окружающим воздухом в кабине. Работа модуля 11 очистки воздуха повторяется для очистки воздуха в кабине.
Датчик 12 воздуха измеряет упомянутую смесь очищенного воздуха и окружающего воздуха и выдает измерительный выходной сигнал. Процессор 13 определяет, удовлетворяет ли качество смеси заданному критерию, на основе измерительного выходного сигнала датчика 12 воздуха, и генерирует первое значение на основе измерительного выходного сигнала датчика 12 воздуха, если качество смеси удовлетворяет заданному критерию, для калибровки датчика 12 воздуха. Следует отметить, что воздух в кабине можно, по существу, называть нулевым воздухом, если качество смеси удовлетворяет заданному критерию, и, следовательно, первое значение можно рассматривать как измерительный выходной сигнал датчика 12 воздуха при нулевом воздухе.
В одном варианте осуществления можно использовать алгоритмы скользящего среднего для определения, удовлетворяет ли качество смеси заданному критерию. Только с целью иллюстрации операция процессора 13 будет описана при установке размера окна равным десяти и интервала выборки, равным одной секунде. Более конкретно, процессор 13 набирает десять измерительных выходных сигналов от датчика 12 воздуха, то есть считывает измерительный выходной сигнал датчика 12 воздуха один раз через каждую секунду в течение десяти секунд и определяет, превышает ли среднеквадратичное отклонение или дисперсия для десяти измерительных выходных сигналов пороговое значение. Если среднеквадратичное отклонение или дисперсия для десяти измерительных выходных сигналов больше, чем пороговое значение, процессор 13 продолжает собирать следующие десять измерительных выходных сигналов датчика 12 воздуха и выполняет операцию определения, превышает ли среднеквадратичное отклонение или дисперсия для десяти измерительных выходных сигналов пороговое значение; если среднеквадратичное отклонение или дисперсия для десяти измерительных выходных сигналов не больше, чем пороговое значение, процессор 13 рассчитывает среднее значение для десяти измерительных выходных сигналов как первое значение. В качестве альтернативы, процессор 13 может считывать текущий измерительный выходной сигнал для датчика 12 воздуха как первое значение, если среднеквадратичное отклонение или дисперсия для десяти измерительных выходных сигналов не превышает пороговое значение.
Когда будет получено первое значение, в одном варианте осуществления, процессор 13 может дополнительно рассчитать разность между первым значением и опорным значением, как величину коррекции для калибровки измерительного выходного сигнала датчика 12 воздуха. Опорное значение представляет собой стандартный выходной сигнал датчика 12 воздуха при нулевом воздухе, который может быть предварительно сохранен в процессоре 13. Значение коррекции можно использовать для компенсации измерительного выходного сигнала датчика 12 воздуха в нормальном режиме работы, то есть когда устройство 10 обработки воздуха работает в нормальном режиме работы, процессор 13 будет считывать измерительный выходной сигнал датчика 12 воздуха и компенсировать измерительный выходной сигнал датчика 12 воздуха, используя значение коррекции, таким образом получают точный показатель качества воздуха посредством индикатора качества. В этом отношении желательно, чтобы отклик датчика 12 воздуха был линейным.
В качестве альтернативы, процессор 13 может изменять конфигурацию периферийных цепей датчика 12 воздуха на основе первого значения для калибровки измерительного выходного сигнала датчика 12 воздуха. В такой конфигурации непосредственный выходной сигнал периферийных цепей, окружающих датчик воздуха, может представлять собой непосредственный выходной сигнал процессора 13 без необходимости дополнительной компенсации.
Предпочтительно, ход калибровки может быть представлен индикатором хода, например одним светодиодом или массивом светодиодов в интерфейсе пользователя, который излучает свет в диапазоне от мигающего света красного цвета, на этапе обработки, до непрерывного света зеленого цвета, который представляет успешное завершение, что позволяет исключить перерывы между ними.
Следует отметить, что в данном варианте осуществления калибровка должна быть выполнена в воздухонепроницаемом пространстве, например воздухонепроницаемой кабине автомобиля.
На фиг. 2 представлен пример устройства 20 обработки воздуха по другому варианту осуществления настоящего изобретения. Устройство 20 обработки воздуха содержит модуль 21 очистки воздуха, датчик 22 воздуха, процессор 23 и переключатель 24, расположенный между датчиком 22 воздуха и модулем 21 очистки. Конфигурации модуля 21 очистки воздуха, датчика воздуха 22 и процессора 23 являются теми же, как и у соответствующих модулей на фиг. 1, и для простоты не будут здесь описаны.
Переключатель 24 может принимать любую конфигурацию, пригодную для переключения во включенное и выключенное состояние, но предпочтительно использовать откидную крышку или скользящую крышку.
В одном варианте осуществления процессор 23 дополнительно выполнен с возможностью открывания или закрывания переключателя 24 для обеспечения протекания потока воздуха, очищенного модулем 21 очистки, к датчику 22 воздуха или для блокирования потока очищенного воздуха к датчику 22 воздуха, соответственно. В качестве альтернативы, переключатель 24 можно вручную переключать в состояние включено или выключено.
В нормальном рабочем режиме переключатель 24 закрыт посредством процессора 23, чтобы блокировать поток воздуха, очищенного модулем 21 очистки, к датчику 22 воздуха, и поэтому операция каждого модуля в устройстве 20 обработки воздуха для очистки воздуха в кабине будет такой же, как описано со ссылкой на фиг. 1 и не будет здесь описана для простоты.
Когда требуется выполнить калибровку датчика 22 воздуха устройства 20 обработки воздуха, устройство 10 обработки воздуха переходит в режим калибровки. Режим калибровки может быть активирован по инструкции от пользователя или других операторов, или может быть активирован автоматически, как описано со ссылкой на фиг. 1. В режиме калибровки переключатель 24 открыт процессором 23, обеспечивая возможность протекания воздуха, очищенного посредством модуля 21 очистки, к датчику 22 воздуха.
Когда активируется режим калибровки, модуль 21 очистки воздуха устройства 20 обработки воздуха начинает выполнять очистку воздуха в кабине. Более конкретно, окружающий воздух в кабине всасывается в модуль 21 очистки воздуха через впускную область 213 посредством электродвигателя 211, и воздух пропускают через средство 210 фильтрации, и затем очищенный воздух выходит из модуля 21 очистки воздуха через выпускную область 214 и смешивается с окружающим воздухом в кабине. Поскольку переключатель 24 открыт, часть очищенного воздуха также направляется к датчику 22 воздуха. Обычно воздух, очищенный модулем 21 очистки, можно рассматривать, как нулевой воздух; следовательно, текущий выходной сигнал датчика 22 воздуха можно рассматривать как выходной сигнал при нулевом воздухе, то есть как первое значение для калибровки датчика 22 воздуха.
Следует отметить, что в данном варианте осуществления, поскольку воздух, очищенный модулем 21 очистки, подают непосредственно к датчику 22 воздуха для получения первого значения, калибровка может быть выполнена без необходимости использования воздухонепроницаемого пространства.
Кроме того, поскольку воздух, очищенный модулем 21 очистки, подают непосредственно к датчику 22 воздуха для получения первого значения, для устройства 20 обработки воздуха по фиг. 2 требуется меньше времени для окончания калибровки, чем для устройства 10 обработки воздуха по фиг. 1.
На фиг. 3 показана блок-схема последовательности операций способа калибровки датчика воздуха устройства обработки воздуха в соответствии с одним вариантом осуществления.
Вначале, на этапе 301, воздух очищают, используя устройство обработки воздуха.
Затем, на этапе 302, измеряют первое количество воздуха, используя датчик воздуха для получения первого значения, для калибровки датчика воздуха, в котором первое количество воздуха содержит очищенный воздух.
В случае необходимости после этапа 302 способ может дополнительно включать в себя этап, на котором генерируют значение компенсации на основе первого значения и опорного значения для калибровки датчика воздуха, причем опорное значение представляет собой стандартный выход датчика воздуха при нулевом воздухе.
В случае необходимости способ может дополнительно включать в себя этап, на котором принимают инструкцию через пользовательский интерфейс для начала или остановки любого одного из этапов 301 и 302.
В одном варианте осуществления первое количество воздуха представляет собой очищенный воздух, и последующий этап измерения на этапе 302 может дополнительно включать в себя этапы, на которых: направляют очищенный воздух к датчику воздуха; и измеряют очищенный воздух, используя датчик воздуха, для получения первого значения.
В другом варианте осуществления первое количество воздуха представляет собой смесь окружающего воздуха и очищенного воздуха, и устройство обработки воздуха расположено в воздухонепроницаемом пространстве, и последующий этап измерения на этапе 302 может дополнительно включать в себя этапы, на которых определяют, удовлетворяет ли качество первого количества воздуха в воздухонепроницаемом пространстве заданному критерию; и измеряют первое количество воздуха, используя датчик воздуха, для получения первого значения, если качество первого количества воздуха удовлетворяет заданному критерию.
В случае необходимости этап определения может дополнительно включать в себя этапы, на которых: собирают множество измерительных выходных сигналов датчика воздуха и определяют, не превышает ли среднеквадратичное отклонение множества измерительных выходных сигналов пороговое значение.
В соответствии с другим вариантом осуществления настоящего изобретения предусмотрен набор исполняемых компьютером инструкций, выполненных с возможностью выполнения этапов 301 и 302 по фиг. 3.
Следует отметить, что описанные выше варианты осуществления представляют собой, скорее, иллюстрацию, а не ограничение изобретения, и что специалисты в данной области техники будут иметь возможность разработать альтернативные варианты осуществления без выхода за пределы объема приложенной формулы изобретения. В формуле изобретения любые номера ссылочных позиций, расположенные между круглыми скобками, не следует рассматривать как ограничение формулы изобретения. Слово "содержащий" не исключает присутствие элементов или этапов, не представленных в пункте формулы изобретения или в описании. Употребление единственного числа не исключает присутствие множества таких элементов. В пунктах формулы изобретения, направленных на устройство, в которых перечислено несколько модулей, некоторые из этих модулей могут быть воплощены как один и тот же элемент аппаратных средств или программного средства. Использование слов первый, второй и третий и так далее не обозначает какой-либо порядок. Эти слова следует интерпретировать, как названия.
Устройство обработки воздуха
Осветительное устройство
Детектор рентгеновского излучения для формирования фазово-контрастных изображений
Светоизлучающее устройство бокового действия с преобразованием длины волны
Эпилятор, имеющий приводимый массажирующий элемент
Набор изделий, которые являются пригодными для использования в процессе приготовления напитка
Беспроводное наблюдение за пациентом с использованием потоковой передачи медицинских данных с помощью связанного с телом соединения
Модульное осветительное устройство
Устройство вывода автостереоскопического изображения
Безопасное стартерное устройство
Квазистатическая установка с распределенными источниками для рентгеновской визуализации с высокой разрешающей способностью

