Результат интеллектуальной деятельности: Электропривод антенны РЛС
Вид РИД
Изобретение
Предлагаемое изобретение относится к области радиолокационной техники, в частности к электроприводу антенн РЛС кругового обзора или навигации для вращения антенн при круговом или секторном обзоре пространства.
В настоящее время известен безредукторный привод антенн РЛС (см. "Вопросы радиоэлектроники", серия - общетехническая; вып.19; 1970 г., Д.Л. Глушкин, И.А. Фрагин. "Пути повышения надежности и долговечности приводов вращения крупногабаритных антенн РЛС").
Известный привод (см. фиг. 1) включает в себя 4 дуговых статора 4 и ротор, который одновременно является поворотным столом антенны. Ротор представляет из себя обычное исполнение ротора короткозамкнутого асинхронного двигателя с обмоткой типа "беличья клетка" (см. фиг. 2 указанного источника или фиг. 1 настоящей заявки).
Известный безредукторный привод обладает следующими недостатками.
Каждый тип антенн, их размещение на конкретном объекте однозначно определяют возможные габариты ротора, его радиус и, соответственно, кривизну рабочей поверхности дуговых статоров.
Таким образом, для каждой конкретной антенны РЛС необходимо индивидуально проектировать все элементы безредукторного привода.
Известно, что к величине и стабильности зазора между дуговыми статорами и ротором предъявляются весьма высокие требования. Поэтому кривизна рабочей поверхности дуговых статоров (см. фиг. 1) и рабочей поверхности ротора должны быть выполнены с большой точностью. Это определяет высокие требования к точности изготовления всех элементов привода, объясняет сложность технологии изготовления и высокую стоимость.
Толщина ротора должна соответствовать ширине рабочей поверхности статора, которую необходимо увеличивать при увеличении требуемой тяговой силы статоров. Поэтому вес и габариты ротора значительны. А так как ротор выполнен в виде "беличьей клетки", то его конструкция сложна. Сложность конструкции и значительный вес вызывают большой момент инерции привода.
В предлагаемом безредукторном приводе устранены указанные недостатки и улучшены динамические характеристики за счет того, что статоры выполнены линейными, включают в себя несколько типоразмеров, а ротор выполнен в виде плоского диска, причем статоры расположены в плоскости, параллельной плоскости диска-ротора, их число, типоразмер и расстояния до оси вращения антенны зависят от размеров антенны и требуемых параметров вращения.
Выполнение ротора в виде диска упрощает конструкцию ротора, облегчает его вес, уменьшает момент инерции ротора и улучшает динамические характеристики привода.
Благодаря тому, что статоры выполнены линейными, конструкция их и, следовательно, технология изготовления значительно упрощена, а значит, снижается стоимость изготовления. Так как ротор выполнен в виде диска, и рабочей поверхностью является плоская поверхность диска, а не цилиндрическая, то упрощается технология изготовления ротора привода, и это также снижает стоимость изготовления.
В предлагаемом приводе возникает возможность, изменяя расстояния установки статоров от оси вращения, изменять скорость вращения антенны и крутящий момент.
Таким образом, однажды разработав и изготовив серию статоров с различными тяговыми усилиями, получена возможность, варьируя их числом и расстояниями от оси вращения антенны, обеспечить заданные режимы вращения антенн различных РЛС при их проектировании. Это значительно ускоряет разработку, снижает затраты на нее и в дальнейшем значительно ускоряет и удешевляет изделие при его серийном изготовлении.
Так как к величине и равномерности воздушных зазоров между статорами и ротором предъявляются высокие требования, a в процессе изготовления и эксплуатации выдержать их между плоскостями значительно проще, чем между цилиндрическими поверхностями, то в предлагаемом приводе увеличивается надежность и упрощается эксплуатация.
На предприятии был рассчитан, изготовлен и исследован опытный образец предлагаемого привода, испытания которого подтвердили его работоспособность и положительные качества.
Механические характеристики безредукторного привода антенны РЛС приведены на фиг. 5. В результате испытаний получены характеристики привода при различных материалах ротора. Для случая применения материала с более высокой электропроводностью получены лучшие значения вращающего момента, КПД и других параметров.
Материалы заявки рассматривались на заседании секции НТС, протокол решения которого прилагается.
Предлагаемое изобретение будет понятно из нижеприведенного описания.
Перечень фигур на чертежах
Фиг. 1 - Конструктивная схема известного безредукторного привода антенны РЛС.
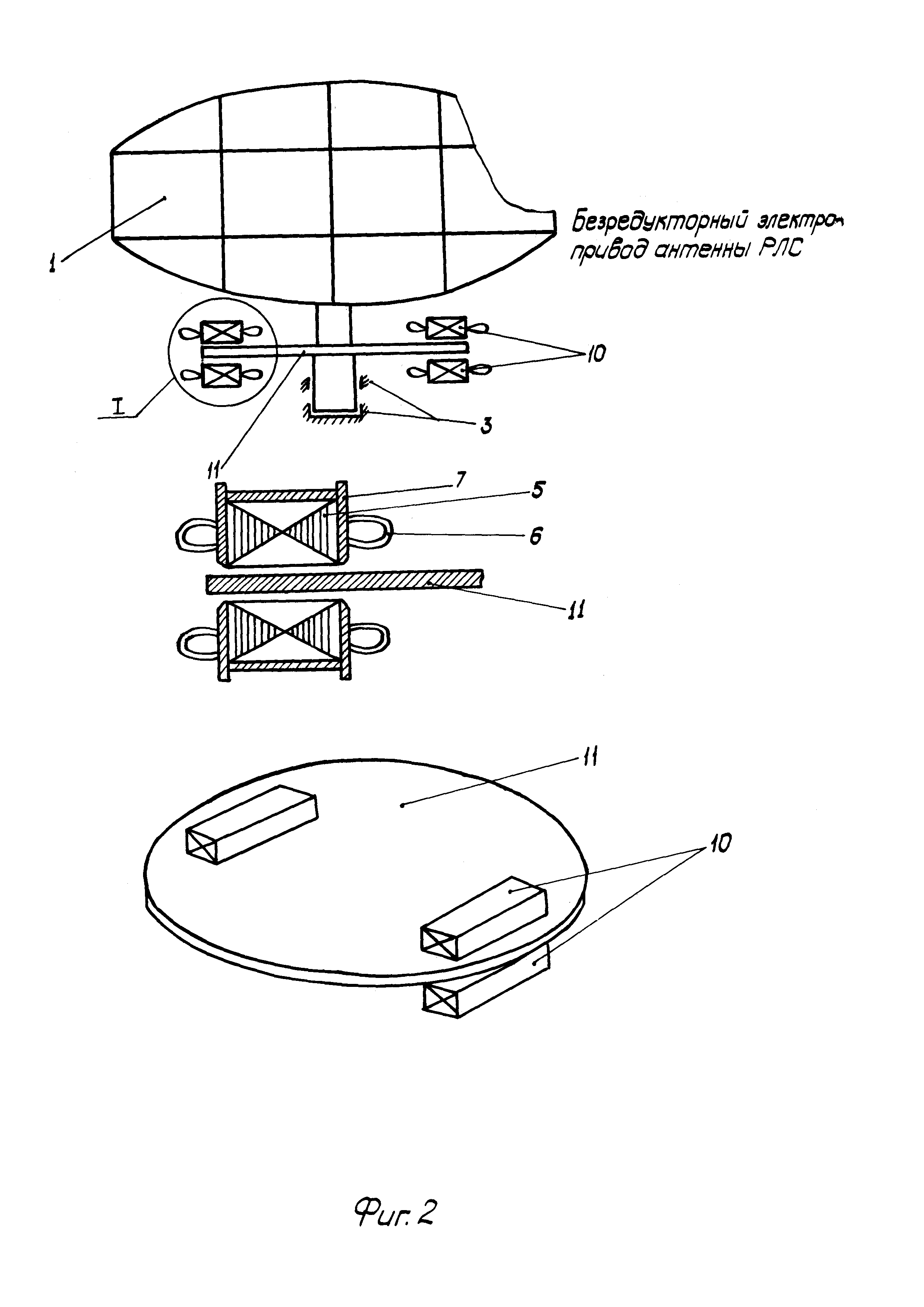
Фиг. 2 - Конструктивная схема предлагаемого безредукторного привода.
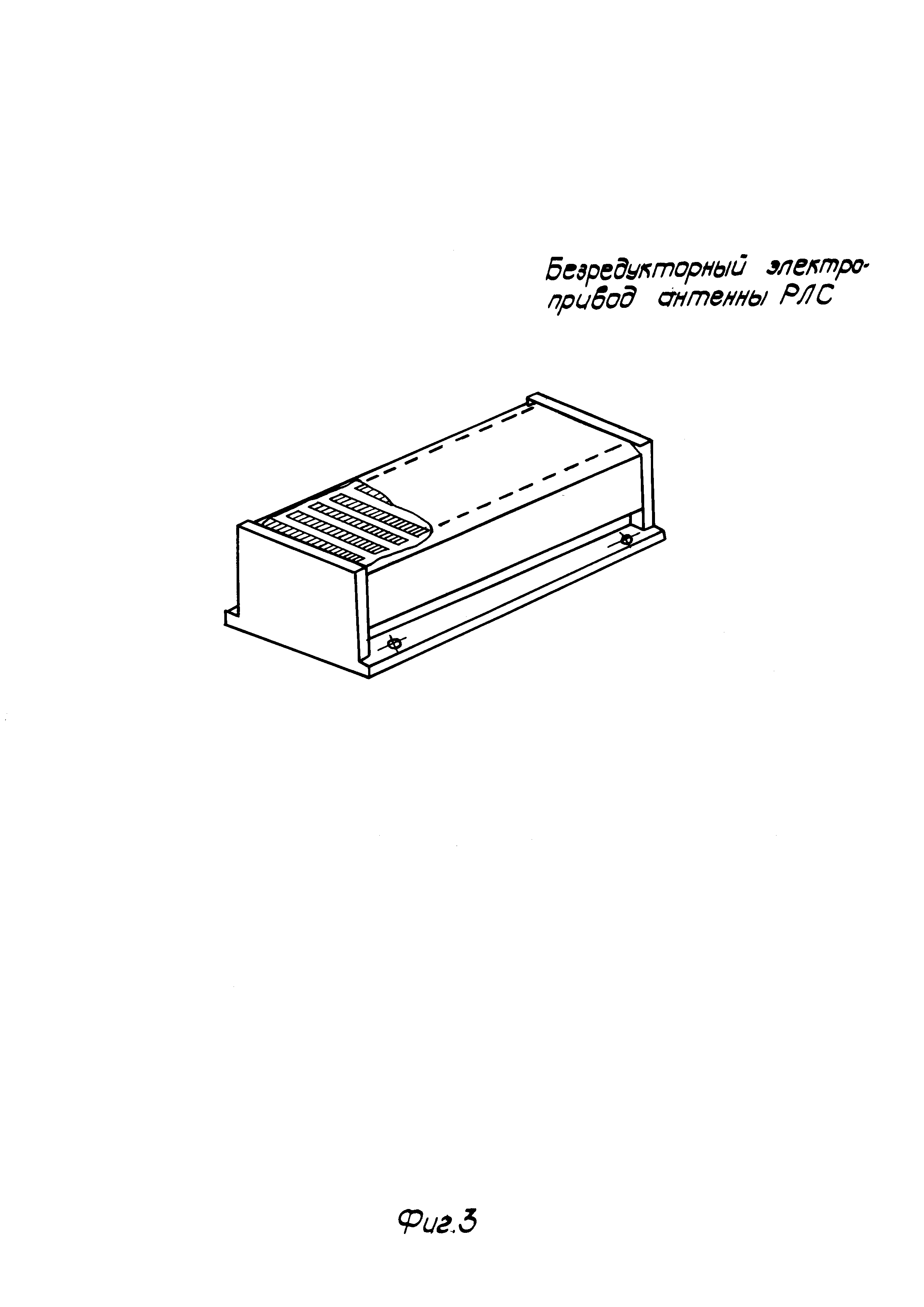
Фиг. 3 - Линейный статор.
Фиг. 4 - Диск-ротор.
Фиг. 5 - Механические характеристики безредукторного привода.
Обозначения
1 - Антенна (вращающаяся часть антенны);
2 - ротор (он же поворотный стол);
3 - подшипник;
4 - дуговой статор;
5 - сталь статора;
6 - обмотка статора;
7 - сталепрессующие детали статора;
8 - алюминиевый стержень ("беличья клетка");
9 - короткозамыкатель (кольцо "беличьей клетки");
10 - линейный статор;
11 - диск-ротор;
12 - основание антенны;
13 - фланец.
Детальное описание
Предлагаемый безредукторный электропривод антенны РЛС (см. фиг. 2) состоит из следующих основных узлов:
I - вращающаяся часть антенны;
II - линейные статоры (10);
III - диск-ротор (11).
I. Вращающаяся часть антенны (1) укреплена и сбалансирована на основании антенны (12) в подшипниках (3) и имеет возможность вращаться в любом направлении вокруг вертикальной оси антенны.
II. Линейные статоры (10) (см. фиг. 3) выполнены шихтованными из листов электротехнической стали (для уменьшения потерь на вихревые токи и перемагничивание). В пакете статора выфрезерованы пазы, в которых уложена трехфазная обмотка (6), соединенная по схеме "звезда" или "треугольник". Полюсный шаг обмотки выбирается в зависимости от линейной скорости перемещения диска-ротора относительно статоров с учетом величины скольжения и синхронной скорости переменного (с частотой сети) магнитного поля, бегущего вдоль статоров при подключении обмотки к трехфазной сети.
III. Диск-ротор (11) (см. фиг.4) выполнен из немагнитного металла с высокой электропроводимостью (например: алюминий или медь). Диск может быть выполнен и из магнитного материала (например: железо), однако, в этом случае кроме высокого сопротивления роторным токам диск будет притягиваться к статорам, т.е. будут возникать дополнительные силы притяжения ротора к линейным статорам, что вызывает возникновение дополнительных требований к конструкции вращающейся части антенны.
Диск своим фланцем (13) крепится на подвижной части антенны.
Выполнение ротора привода в виде диска упрощает конструкцию ротора, облегчает его вес, уменьшает момент инерции и улучшает динамические характеристики привода.
При подаче переменного 3-фазного напряжения на обмотки статоров (6) образуется магнитное поле, бегущее вдоль статоров. Направление перемещения поля зависит от схемы включения обмоток статора.
Так как это поле переменно и по величине и по направлению, то в диске-роторе индуктируются токи, которые, в свою очередь, создают вторичное магнитное поле.
Бегущее поле статоров увлекает за собой поле ротора, а следовательно, и сам ротор, приводя во вращение антенну. Таким образом происходят процессы, полностью идентичные происходящим в известном трехфазном двигателе.
Так как статоры выполнены линейными, а ротор - дисковым, предлагаемый привод дает возможность, варьируя числом, типоразмерами и расстоянием статоров от оси вращения антенны, осуществлять круговое или секторное вращение антенн различных размеров и с различными параметрами вращения.
Электропривод антенны РЛС, содержащий статоры и ротор, связанный с подвижной частью антенны, причем ротор выполнен в виде металлического диска, а обмотки статора выполнены линейными, отличающийся тем, что, с целью регулировки числа оборотов электропривода за счет электрической угловой скорости, статоры закреплены подвижно относительно ротора, с возможностью перемещения их к центру, по радиусу ротора.
Устройство селекции движущихся целей
Мультипликативная антенна

