Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Предлагаемые технические решения относятся к области радиолокации и могут быть использованы для измерения угловой координаты объектов.
Известен способ измерения угловой координаты объекта в процессе обзора пространства импульсной радиолокационной станцией (РЛС), включающий излучение зондирующих сигналов, прием отраженных от объекта сигналов, измерение их параметров, обнаружение в принятых сигналах пачек импульсов, вычисление угловой координаты объекта (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. - М.: Военное издательство Министерства обороны СССР, 1968, стр. 109).
Известна радиолокационная станция, реализующая указанный способ измерения координаты объекта (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. - М.: Военное издательство Министерства обороны СССР, 1968, стр. 110, рис. 4.23).
Известная радиолокационная станция содержит последовательно соединенные антенну, радиоприемное устройство, устройство обнаружения сигнала, включающее пороговое устройство, вычислитель, а также датчик текущей угловой координаты, вход которого соединен с координатным выходом антенны, а выход - со входом вычислителя.
В известном способе измерения угловой координаты объекта и устройстве, реализующем данный способ, за угловую координату объекта θ берут среднее арифметическое двух отсчетов - начала (θн) и конца (θк) пачки импульсов сигналов по измеряемой координате:
θ=(θн+θк)/2
Недостатком известных способа и устройства является низкая точность измерения угловой координаты. Это связано с тем, что в них не учитывается неравномерность уровней сигналов в пачке импульсов принятых сигналов.
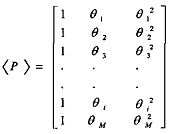
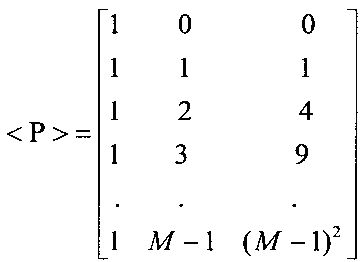
Наиболее близким к предлагаемому способу измерения угловой координаты объекта является способ по патенту RU 2426147 С2 от 07.07.2009, включающий излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов Ai и угловых координат θi луча, соответствующих принятым сигналам, обнаружение пачек импульсов принятых сигналов {Ai, θi} i=1…M, где М - число импульсов пачки, определение угловой координаты объекта, отличающийся тем, что определение угловой координаты объекта осуществляют путем обработки обнаруженных пачек импульсов принятых сигналов, следующим образом: из значений угловых координат {θi} луча формируют матрицу 〈P〉, имеющую М строк и три столбца следующей структуры
 ,
,
определяют вектор  , образованный тремя искомыми коэффициентами a
0, a
1, a
2 параболической аппроксимации огибающей пачки импульсов принятых сигналов
, образованный тремя искомыми коэффициентами a
0, a
1, a
2 параболической аппроксимации огибающей пачки импульсов принятых сигналов  , как решение трех алгебраических уравнений:
, как решение трех алгебраических уравнений:  , где
, где 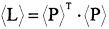 ,
,  ;
; 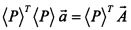 , где
, где  - транспонированная матрица
- транспонированная матрица  ;
;
 - M-мерный вектор амплитуд сигналов пачки;
- M-мерный вектор амплитуд сигналов пачки;
A1, A2, …Ai, …AM - амплитуды сигналов пачки;
после чего определение угловой координаты объекта осуществляют в соответствии с формулой:  , где
, где  - измеренная угловая координата объекта.
- измеренная угловая координата объекта.
Радиолокационная станция, реализующая этот способ, содержит передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока оценки угловых координат соответственно, при этом блок оценки угловых координат включает запоминающее устройство обнаруженных сигналов, блок обнаружения пачек импульсов принятых сигналов и вычислитель, причем первый и второй входы запоминающего устройства обнаруженных сигналов являются первым и вторым входами блока оценки угловых координат соответственно, M выходов запоминающего устройства обнаруженных сигналов соединены с M входами блока обнаружения пачек импульсов принятых сигналов, выходы которого соединены со входами блока определения мощности сигнала, соответствующего расположению объекта на направлении максимума луча. Выходы этого блока соединены со входами вычислителя, выход вычислителя является выходом блока оценки угловых координат.
Недостатком наиболее близких способа и устройства является низкое быстродействие при оценке угловых координат и значительный объем занимаемой оперативной памяти процессора, связанные с обработкой и хранением массивов чисел с плавающей запятой.
Заявляемое изобретение направлено на устранение указанных недостатков.
Решаемой задачей (техническим результатом) является повышение быстродействия при оценке угловой координаты и сокращение необходимого объема оперативной памяти процессора.
Указанный технический результат в способе измерения угловой координаты объекта, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание амплитуд принятых сигналов {Am} и угловых координат {θm} антенны, соответствующих принятым сигналам, обнаружение пачки импульсов принятых сигналов {Am, θm} m=1…M, где М - число импульсов пачки, формирование огибающей пачки импульсов принятых сигналов, достигается тем, что запоминают угловую координату θ1 антенны, соответствующую первому импульсу пачки принятых сигналов, определяют значение углового дискрета Δθ как угол поворота антенны за период повторения зондирующих сигналов, определяют коэффициенты a
0, a
1 и a
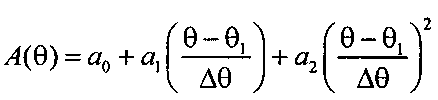
2 полинома второй степени  из условия аппроксимации амплитуд импульсов пачки принятых сигналов A(θm)≅Am, после чего угловую координату объекта θоб вычисляют по формуле
из условия аппроксимации амплитуд импульсов пачки принятых сигналов A(θm)≅Am, после чего угловую координату объекта θоб вычисляют по формуле

При этом может использоваться любой из известных алгоритмов полиномиального приближения, включая итерационные или поисковые [см., например, Ю.Ю. Тарасевич. Численные методы на Mathcad′e. Учебное пособие. Астрахань, Астраханский гос. пед. ун-т, 2000, - 70 с или Лоран, П.Ж. Аппроксимация и оптимизация. - М.: Мир, 1975. - С. 496.].
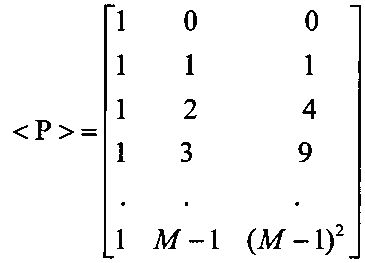
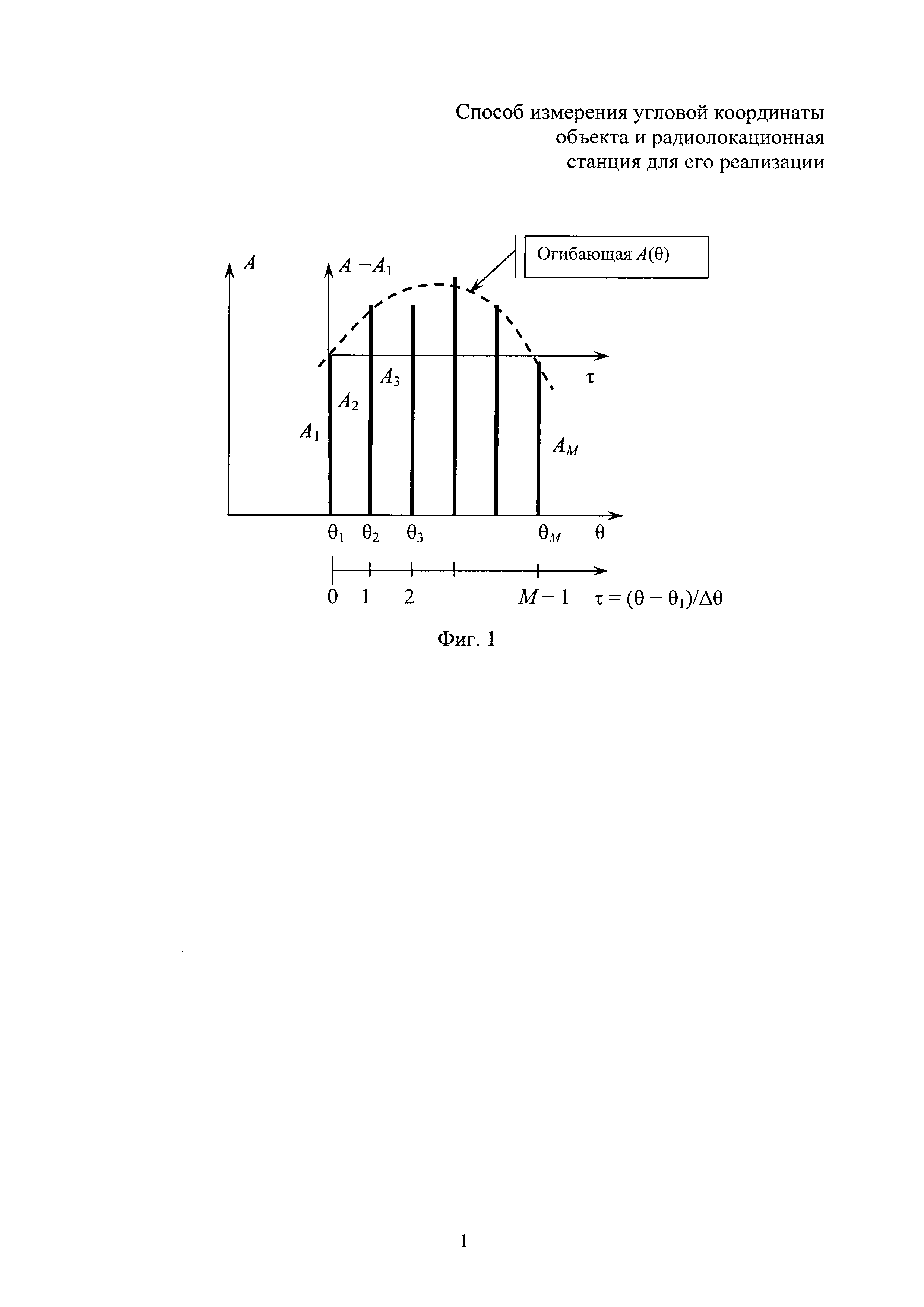
В предлагаемом способе осуществляют переход от абсолютной угловой координаты θ к относительной координате τ=(θ-θ1)/Δθ (см. фиг. 1), при которой угловым координатам θm импульсов пачки соответствуют целочисленные отсчеты τm=(θm-θ1)/Δθ=m-1. Благодаря этому, вычисление аппроксимирующего полинома A(θ) связано с операциями над целыми числами (точнее, целочисленными матрицами), которые выполняются быстрее и требуют меньше оперативной памяти.
Искомые коэффициенты a 1 и a 2 полинома A(θ) могут определять следующим образом: формируют целочисленную квадратную матрицу третьего порядка <L>=<P>T<P>, где <Р> - целочисленная матрица из М строк и трех столбцов следующей структуры
 ,
,
а <Р>T - транспонированная матрица <Р>, амплитуды принятых сигналов {Am} преобразуют в вектор-столбец из трех коэффициентов  ,
,  ,
,  и определяют коэффициенты a
0, a
1 и a
2 в результате решения системы линейных алгебраических уравнений третьего порядка
и определяют коэффициенты a
0, a
1 и a
2 в результате решения системы линейных алгебраических уравнений третьего порядка

Такой алгоритм поиска коэффициентов a
0, a
1 и a
2 полинома A(θ) соответствует наилучшему среднеквадратичному приближению, т.е. минимуму суммы квадратов отклонений  [см., например, Ю.Ю. Тарасович. Численные методы на Mathcad′e. Учебное пособие. Астрахань, Астраханский гос. пед. ун-т, 2000, - 70 с]. Операции с целочисленными матрицами <Р> и <L> требуют существенно меньших временных затрат, чем операции с аналогичными по структуре матрицами чисел с плавающей запятой (по прототипу).
[см., например, Ю.Ю. Тарасович. Численные методы на Mathcad′e. Учебное пособие. Астрахань, Астраханский гос. пед. ун-т, 2000, - 70 с]. Операции с целочисленными матрицами <Р> и <L> требуют существенно меньших временных затрат, чем операции с аналогичными по структуре матрицами чисел с плавающей запятой (по прототипу).
В способе измерения угловой координаты объекта коэффициенты a
1 и a
2 полинома A(θ) могут определять следующим образом: формируют целочисленную квадратную матрицу второго порядка <L>, коэффициенты которой вычисляют по формулам L11=(M-1)М(2М-1)/6, L22=(M-1)М(2M-1)(3M2-3M-1)/30, L12=L21=((M-1)M/2)2, где М - число импульсов пачки, амплитуды принятых сигналов {Am} преобразуют в вектор-столбец из двух коэффициентов  ,
,  , где A1 - амплитуда первого импульса пачки, и определяют коэффициенты a
1 и a
2 в результате решения системы линейных алгебраических уравнений второго порядка
, где A1 - амплитуда первого импульса пачки, и определяют коэффициенты a
1 и a
2 в результате решения системы линейных алгебраических уравнений второго порядка

Суть этого состоит в том, что вводится система отсчета амплитуд, начало которой привязано к амплитуде первого импульса (см. фиг. 1). Тогда коэффициент a 0 аппроксимирующей параболы тождественно равен нулю, и число искомых коэффициентов сокращается до двух. Кроме того, элементы матрицы <L> являются суммами степеней целых чисел, для которых известны явные выражения [Справочник по математике для инженеров и учащихся втузов. Бронштейн И.Н., Семендяев К.А. - М.: Наука. Главная редакция физмат. литературы, 1981. с. 160]
Σm2=(M-1)M(2М-1)/6, Σm3=(M-1)М(2М-1)(3М2-3М-1)/30, Σm4=((М-1)М/2)2.
Определение отношения коэффициентов а
1 и а
2 в (1) могут осуществлять следующим образом: в соответствии с п. 3 вычисляют коэффициенты матрицы <L>: L11=(M-1)М(2М-1)/6, L22=(M-1)M(2M-1)(3M2-3M-1)/30, L12=L21=((M-1)M/2)2, где M - число импульсов пачки, и два коэффициента вектора b:  ,
,  , после чего значение а
1/а
2 определяют следующим образом
, после чего значение а
1/а
2 определяют следующим образом

Дело в том, что в соответствии с правилом Крамера [Справочник по математике для инженеров и учащихся втузов. Бронштейн И.Н., Семендяев К.А. - М.: Наука. Главная редакция физмат, литературы, 1981. с. 192] искомые неизвестные системы уравнений (3) определяются отношениями алгебраических дополнений к определителю системы. Но поскольку нас интересуют не сами искомые переменные а 1 и а 2, а их отношение, то оно дается отношением алгебраических дополнений (4). Тем самым сокращается объем вычислений.
Изобретение иллюстрируется следующими чертежами.
На фиг. 1 изображена пачка импульсов, системы координат и параболическая огибающая пачки, иллюстрирующие суть заявляемого способа.
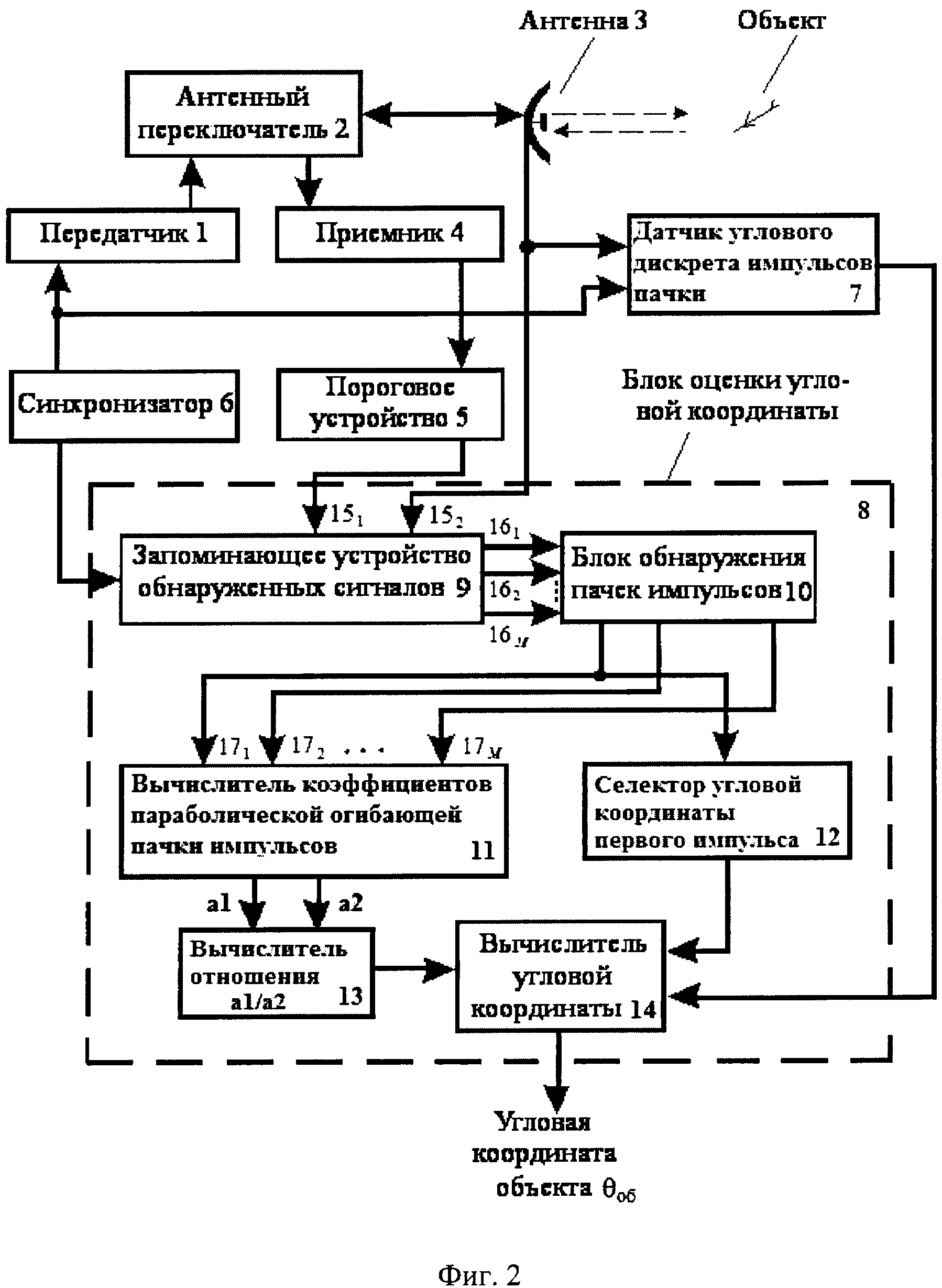
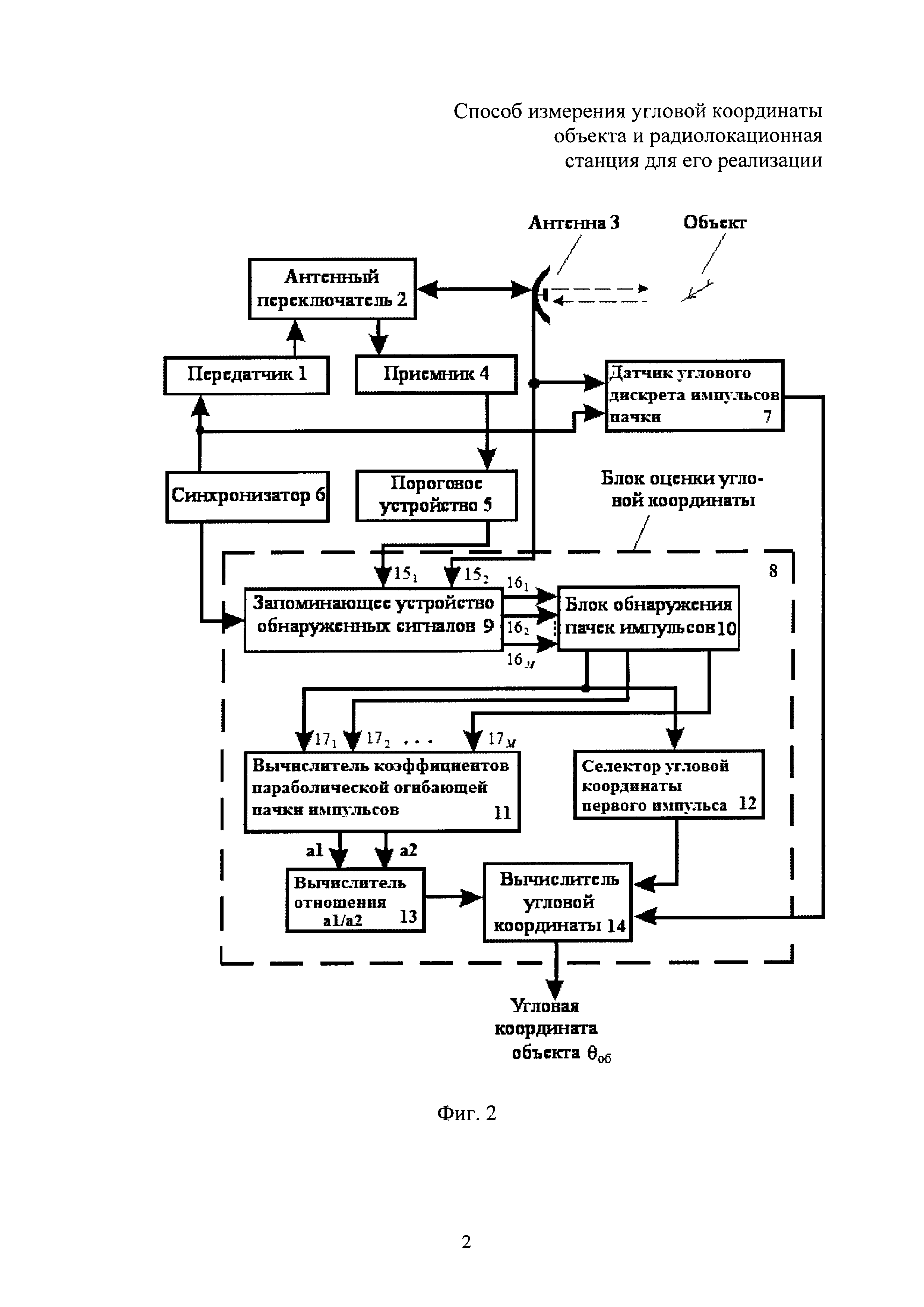
На фиг. 2 изображена блок-схема РЛС, реализующая заявляемый способ измерения угловых координат.
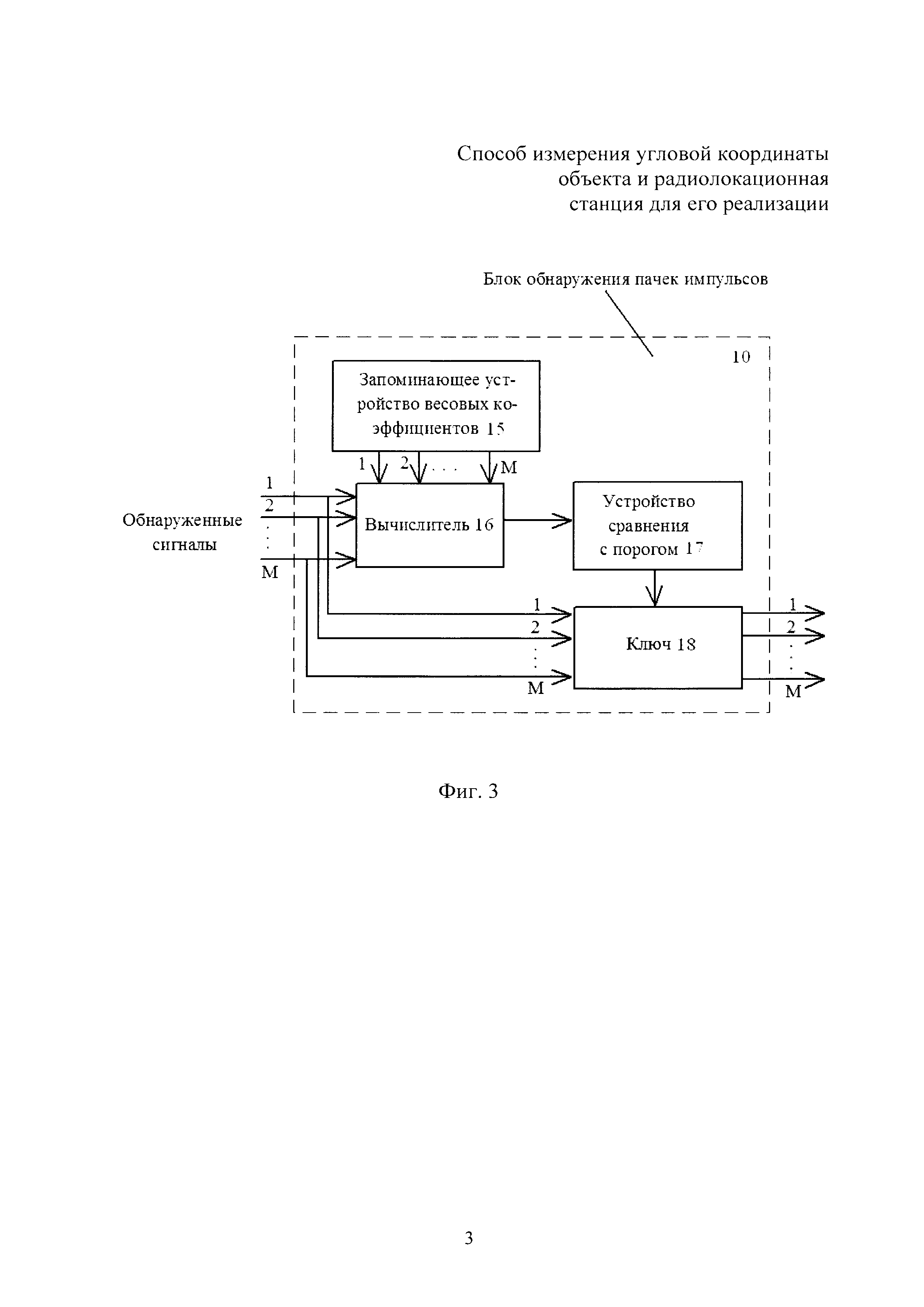
На фиг. 3 представлена структурная схема блока обнаружения пачек импульсов.
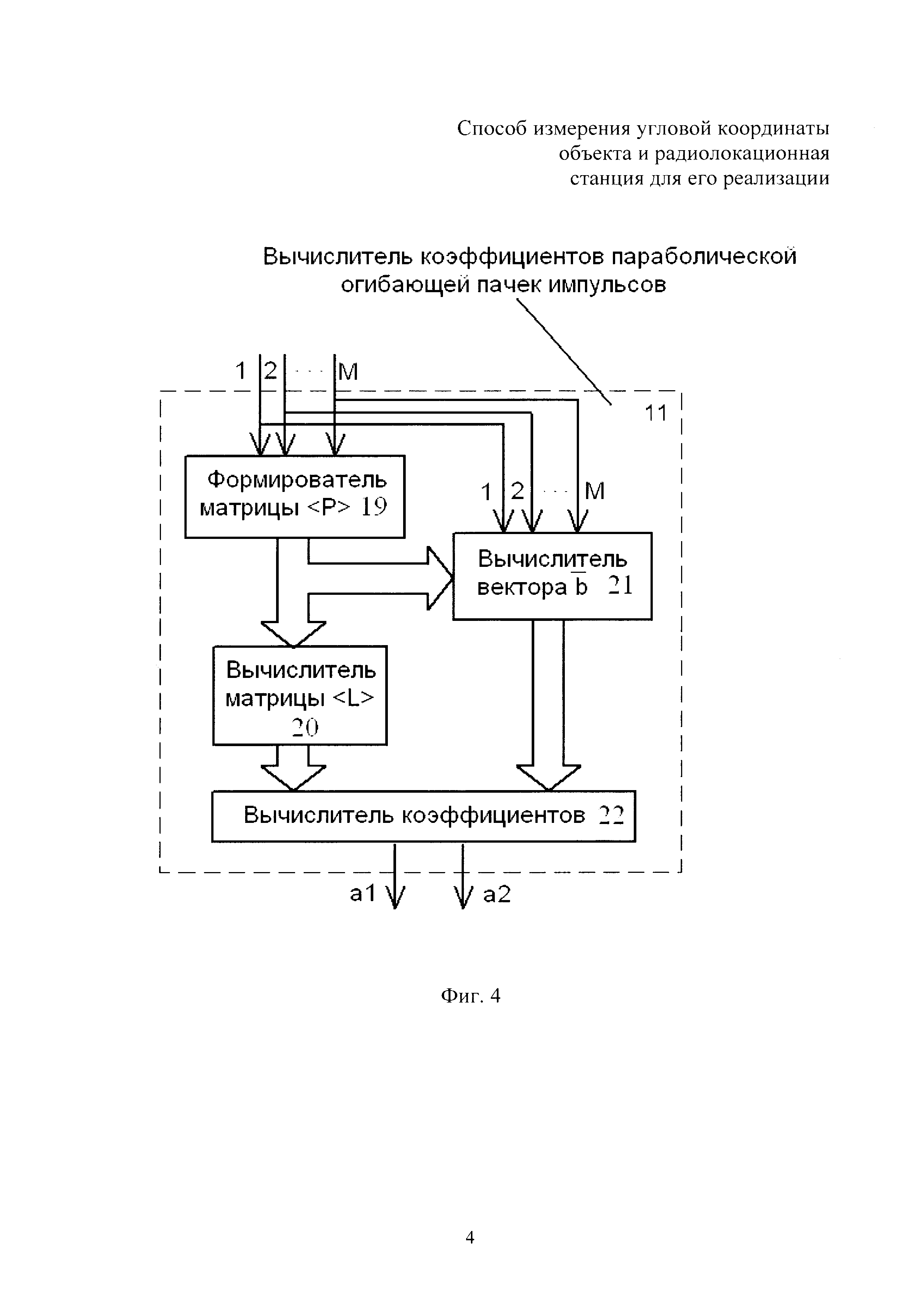
На фиг. 4 представлена структурная схема вычислителя коэффициентов параболической аппроксимации пачек импульсов.
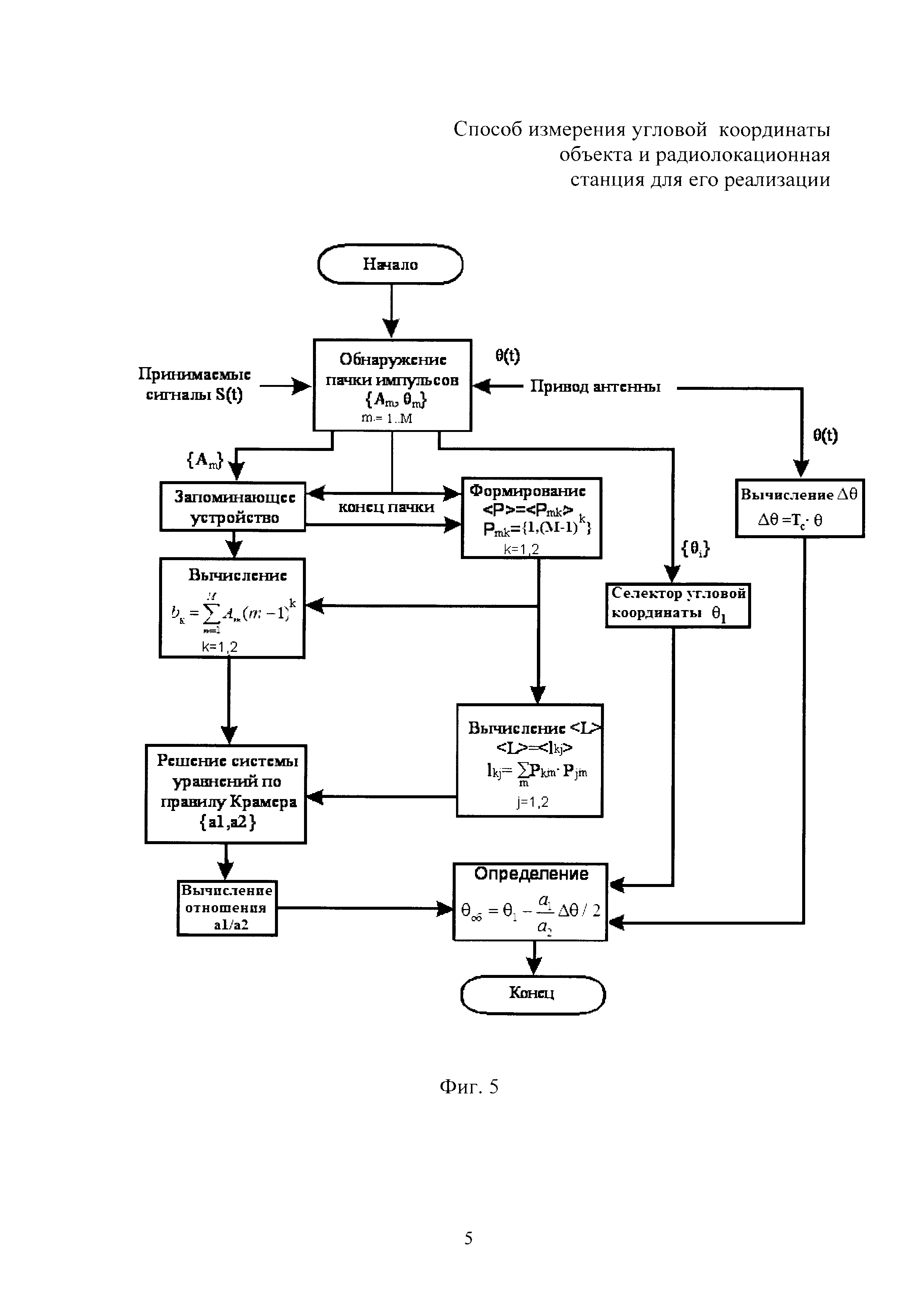
На фиг. 5 представлен алгоритм работы блока оценки угловой координаты объекта.
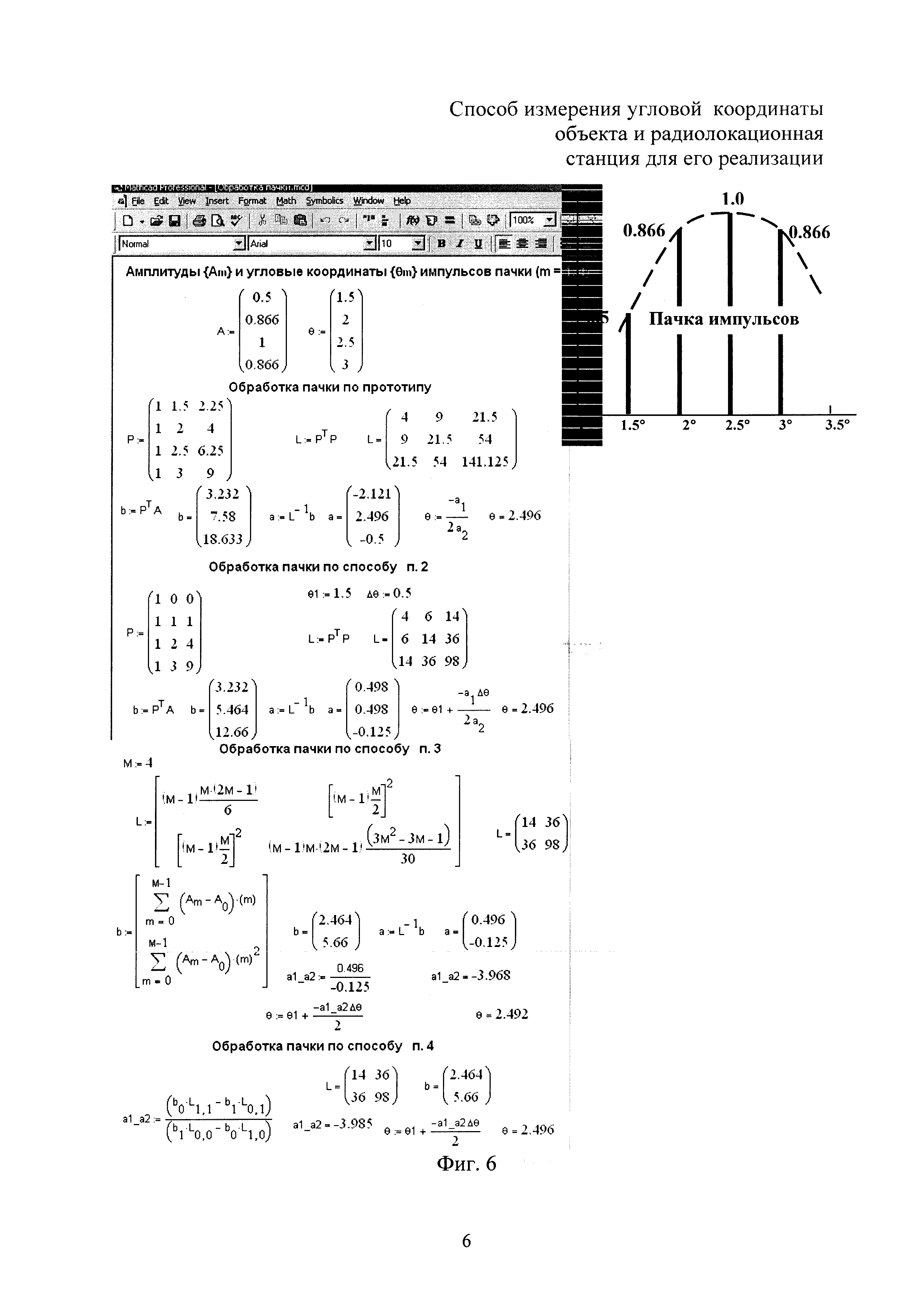
На фиг. 6 представлены скриншоты MathCad-программы обработки несимметричной пачки из четырех импульсов по прототипу и по трем вариантам заявляемого способа, подтверждающие идентичность получаемых результатов.
Радиолокационная станция для осуществления предлагаемого способа представлена на фиг. 2 и содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, датчик углового дискрета импульсов пачки 7, блок 8 оценки угловой координаты, при этом выход передатчика 1 соединен с первым входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 подключен к последовательно соединенным приемнику 4 и пороговому устройству 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым 81 и вторым 82 входами блока 8 оценки угловой координаты, первый и второй выходы синхронизатора соединены с входом запуска передатчика и третьим входом 83 синхронизации блока 8 оценки угловой координаты, который содержит запоминающее устройство 9 обнаруженных сигналов, блок 10 обнаружения пачек импульсов, вычислитель 11 коэффициентов параболической огибающей пачки импульсов, причем к вычислителю 11 подключен вычислитель 12 отношения a 1/a 2, а также вычислитель 13 угловой координаты объекта, три входа которого соединены соответственно с выходами вычислителя 13, селектора 14 угловой координаты первого импульса пачки и датчика 7 углового дискрета импульсов пачки, причем первый и второй входы запоминающего устройства 9 обнаруженных сигналов являются соответственно первым 81 и вторым 82 входами блока 8 оценки угловой координаты, M выходов запоминающего устройства 9 обнаруженных сигналов соединены с входами блока 10 обнаружения пачек импульсов, M выход которого соединены с входами вычислителя 11 коэффициентов параболической огибающей пачки импульсов соответственно, выход вычислителя 13 угловой координаты является выходом блока 8 оценки угловой координаты.
Технический результат достигается за счет того, что введены датчик углового дискрета импульсов пачки 7, в блок оценки угловой координаты дополнительно введены селектор угловой координаты первого импульса 14, вычислитель отношения а 1/а 2 12, выход датчика углового дискрета импульсов пачки 7 соединен с четвертым входом блока оценки угловой координаты 8, выход синхронизатора 6 и координатный выход антенны соединены с первым и вторым входами датчика углового дискрета импульсов пачки 7 соответственно, два выхода вычислителя коэффициентов параболической огибающей пачек импульсов 11 соединены с двумя входами вычислителя отношения а 1/а 2 12 соответственно, выход вычислителя отношения a 1/a 2 12 соединен с первым входом вычислителя угловой координаты 13, выход селектора угловой координаты первого импульса пачки 14 соединен со вторым входом вычислителя угловой координаты 13, первый выход блока обнаружения пачек импульсов 10 соединен с входом селектора угловой координаты первого импульса 14.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - M., 1967, с. 278).
Антенный переключатель 2 - может быть выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с. 146-147).
Антенна 3 - зеркальная антенна с приводом для механического вращения или фазированная антенная решетка с электронным сканированием (Справочник по радиолокации. Под ред. М. Сколника. Т. 2. - М.: Сов. радио, 1977, с. 132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М, 1967, с. 343-344).
Цифровые элементы: запоминающее устройство обнаруженных сигналов 9 может быть выполнено на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина. - М.: Радио и связь, 1984).
Блок обнаружения пачек импульсов 10 (фиг. 3) не отличается от соответствующего блока прототипа и включает запоминающее устройство весовых коэффициентов 15, вычислитель 16, устройство сравнения с порогом 17 и ключ 18 и может быть построен на основе известных элементов цифровой обработки (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Советское радио, 1974, стр. 38-40, рис. 1.11).
Вычислитель коэффициентов параболической аппроксимации 11, структурная схема которого представлена на фиг. 4, может быть реализован на программируемых логических интегральных микросхемах, например, серии Л1879ВМ1 или TMS320C6711 (фирмы "Texas Instruments Inc.")
Вычислитель угловой координаты 13 и вычислитель коэффициентов параболической огибающей пачек импульсов 11 реализуют вычисления в соответствии с формулами заявляемого способа и выполняются на основе программируемого микропроцессора, например, серии Л1879ВМ1. На фиг 5 показан алгоритм работы блока оценки угловой координаты 8.
Датчик углового дискрета импульсов пачки 7 построен на основе сдвигового регистра КР1533ИР8 (Пухальский Г.И., Новосельцева Т.Я. Цифровые устройства: Учебное пособие для вузов. - СПб.: Политехника, 1996. - С. 600. - 885 с.).
Работа заявляемой РЛС и осуществление заявляемого способа измерения угловой координаты объекта происходит следующим образом. В передатчике 1 по импульсам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4. С координатного выхода антенны 3 и по командам синхронизатора 6 в датчике углового дискрета импульсов пачки формируется значение углового дискрета Δθ, как угол поворота антенны за период повторения зондирующих сигналов, который поступает на вход вычислителя угловой координаты 14. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается, исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловой координаты 8. Значения мощности сигналов с соответствующими угловыми координатами {θm} антенны по мере движения антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 9 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 9 извлекаются записанные в них данные и подаются в блок обнаружения пачек импульсов 10, где происходит обнаружение пачек импульсов. Уровни принятых сигналов {Am} и соответствующие принятым сигналам угловые координаты {θm} антенны поступают на первые M входов блока обнаружителя пачек импульсов 10, который аналогично прототипу из потока принятых сигналов выделяет пачки импульсов, отраженных от целей, в соответствии с принятыми в системе статистическими критериями начала и конца пачки. В селекторе угловой координаты первого импульса запоминают угловую координату θ1 антенны, соответствующую первому импульсу пачки принятых сигналов. В вычислителе коэффициентов параболической огибающей пачки импульсов осуществляются операции по вычислению коэффициентов а1 и а2, которые поступают в вычислитель отношения a1/a2 13, результаты которого обрабатываются в вычислителе угловой координаты 14 в соответствии с формулой (1) заявляемого способа и формируется оценка угловой координаты объекта.
Таким образом, заявляемые способ и устройство сочетают точность прототипа с сокращенным временем вычислений, благодаря переходу к формированию и обработке целочисленных матриц, а также благодаря дополнительной возможности применения замкнутых формул, заменяющих вычислительные операции по умножению и обращению матриц при решении системы уравнений. Кроме того, сокращается необходимый объем оперативной памяти процессора.



Универсальная лазерная оптическая головка
Способ определения углов наклона блока инерциальных измерителей комплексной системы угловой ориентации относительно плоскости горизонта
Климатическая система транспортного средства
Устройство определения углов наклона блока инерциальных измерителей комплексной системы угловой ориентации относительно плоскости горизонта
Злаковый батончик для питания работающих с ртутью и ее неорганическими соединениями
Механизм машущего крыла
Цилиндропоршневая группа двигателя внутреннего сгорания
Мотор-колесо
Способ лазерной сварки заготовок больших толщин
Способ лазерной термической обработки металлического листа
Универсальная лазерная оптическая головка
Устройство измерения диаграммы направленности антенны
Способ стабилизации лучей спутниковой многолучевой гибридной зеркальной антенны по сигналам от смещенных наземных маяков
Способ измерения комплексной диэлектрической проницаемости материала в диапазоне свч

