Результат интеллектуальной деятельности: БЕСПРОВОДНОЙ МАРКЕР ПЕРСПЕКТИВНОГО ДВИЖЕНИЯ
Вид РИД
Изобретение
Настоящая заявка относится к области медицинских технологий, технологиям магнитно-резонансной томографии и смежным областям. Настоящая заявка находит применение, в частности, при беспроводном определении положения и коррекции движения и поясняется ниже с конкретной ссылкой на упомянутое применение.
В процессе магнитно-резонансной (МР) томографии пациент, предпочтительно, должен оставаться неподвижным во время процедуры сканирования. Однако на практике пациенты могут двигаться и в некоторых случаях вынуждены двигаться во время процедуры сканирования. Например, в ходе кратковременных процедур сканирования пациенты вынуждены двигаться для дыхания. В ходе более длительных процедур сканирования существует вероятность, что пациенты могут изменять свое положение в некоторый момент времени во время процедуры из-за усталости, повышенной возбудимости и т.п. Вероятность перемещения пациента, в общем, повышается с увеличением продолжительности процедуры сканирования, а также повышается в случае с детьми, пожилыми людьми или пациентами с некоторыми заболеваниями (например, болезнью Паркинсона). Коррекция движения становится еще более важной вследствие повышения разрешающей способности, получаемой в результате последних усовершенствований способов МР томографии.
Для коррекции движения пациента в ходе процедур МР сканирования применяли различные способы, включающие в себя методы ретроспективной коррекции движения и методы перспективной коррекции движения. Методы ретроспективной коррекции движения вводят поправку на движение пациента после того, как данные собраны с использованием методов постобработки изображений. Ретроспективная коррекция движения как часть постобработки использует объемное совмещение с интерполяцией вокселей или интерполяцией сигналов в k-пространстве. Ретроспективную коррекцию применяют для ввода поправок на преобразования в плоскости (например, перемещения по осям x, y), которые требуют простых сдвигов и поворотов пикселей изображения. Однако ретроспективная коррекция является неудовлетворительной при коррекции движения через плоскость (например, поступательного перемещения в направлении среза или оси). Интерполяция между срезами вносит значительные эффекты частичного объемного затенения и ухудшение качества вследствие поворота. Изобразительную информацию, потерянную из-за движения через плоскость, невозможно будет восстановить полностью методом ретроспективной коррекции с использованием интерполяции.
Методы перспективной коррекции движения вводят поправку на движение пациента в ходе процедуры сканирования. Перспективная коррекция движения заключается в измерении текущего местоположения пациента или планировании предстоящего(щих) местоположения(ний) пациента и в регулировке сбора данных или обработки изображений для удерживания пациента неподвижным в реконструированном пространстве изображений. При сравнении с методами ретроспективной коррекции движения, методы перспективной коррекции движения могут быть точнее и эффективнее при коррекции движения твердого тела.
Однако большинство способов перспективной коррекции движения не совсем совместимы с существующей последовательностью действий МР томографии. Например, один из способов включает в себя применение камеры для контроля и отслеживания перемещения маркера, размещенного на пациенте в ходе процедуры сканирования. Упомянутый подход дает преимущество непосредственного измерения положения поверхности пациента. Однако применение камер для контроля пациента не подходит, если пациент или участок пациента, который представляет интерес, находится вне поля зрения камеры, время от времени загораживается и т.п. Другой способ включает в себя применение проводных датчиков для контроля перемещения пациента в ходе процедуры сканирования. Однако данный способ неудобен, и проводные соединения могут представлять угрозу безопасности во время сбора магнитно-резонансных данных или могут отсоединяться, что приводит к потере ценных данных. Существуют также способы, основанные на действительном МР сигнале для перспективной коррекции движения. Однако упомянутые способы требуют ввода длительных навигационных модулей и задержек, обусловленных алгоритмами определения движения в реальном времени, в нормальную последовательность томографии.
Настоящая заявка предлагает новые и усовершенствованные систему и способ определения положения пациента и перспективной коррекции движения, которые решают вышеупомянутые и другие проблемы.
В соответствии с одним аспектом предлагается способ магнитно-резонансной томографии (МРТ) с компенсацией движения. Принимают сигналы показания движения от множества маркеров. Сканируют пациента с использованием параметра сканирования МРТ для формирования данных о резонансах МРТ. Реконструируют данные о резонансах МРТ в изображение с использованием параметров сканирования МРТ. Определяют относительное положение пациента по сигналам, показывающим движение. По меньшей мере, один из параметров сканирования и параметров реконструкции изображения модифицируют для компенсации движения пациента.
В соответствии с другим аспектом, магнитно-резонансная система включает в себя магнитно-резонансный сканер и контроллер управления магнитно-резонансным сканированием. Контроллер сканирования управляет магнитно-резонансным сканером для формирования данных ядерного магнитного резонанса от участка объекта обследования в обследуемой области, при этом упомянутый участок объекта обследования совершает движение. К объекту обследования прикрепляют множество маркеров для контроля движения участка объекта обследования внутри обследуемой области. Блок управления движением получает данные движения от маркеров, указывающих движение участка объекта обследования в обследуемой области, и управляет контроллером магнитно-резонансного сканирования, чтобы регулировать параметры сканирования для компенсации движения участка объекта обследования в обследуемой области.
В соответствии с другим аспектом, маркер включает в себя элемент, который движется в ответ на движение пациента, и передатчик, который передает сигналы, несущие данные движения.
Одно преимущество заключается в измерении в реальном времени положения пациента.
Другое преимущество заключается в перспективной коррекции движения.
Еще одно преимущество заключается в полной совместимости с существующей последовательностью действий МРТ.
Дополнительные преимущества настоящего изобретения будут очевидны специалистам в данной области техники после прочтения и изучения нижеследующего подробного описания.
Изобретение может быть осуществлено в форме различных компонентов и схем расположения компонентов, и различных этапов и схем расположения этапов. Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не подлежат истолкованию в смысле ограничения изобретения.
Фиг. 1 - схематическое представление беспроводной системы коррекции движения в соответствии с настоящей заявкой;
Фиг. 2 и 3 - схематические представления другого варианта осуществления беспроводной системы коррекции движения в соответствии с настоящей заявкой;
Фиг. 4 - примерное изображение беспроводного маркера движения в соответствии с настоящей заявкой;
Фиг. 5 и 6 - блок-схемы последовательности операций способа работы беспроводной системы коррекции движения в соответствии с настоящей заявкой.
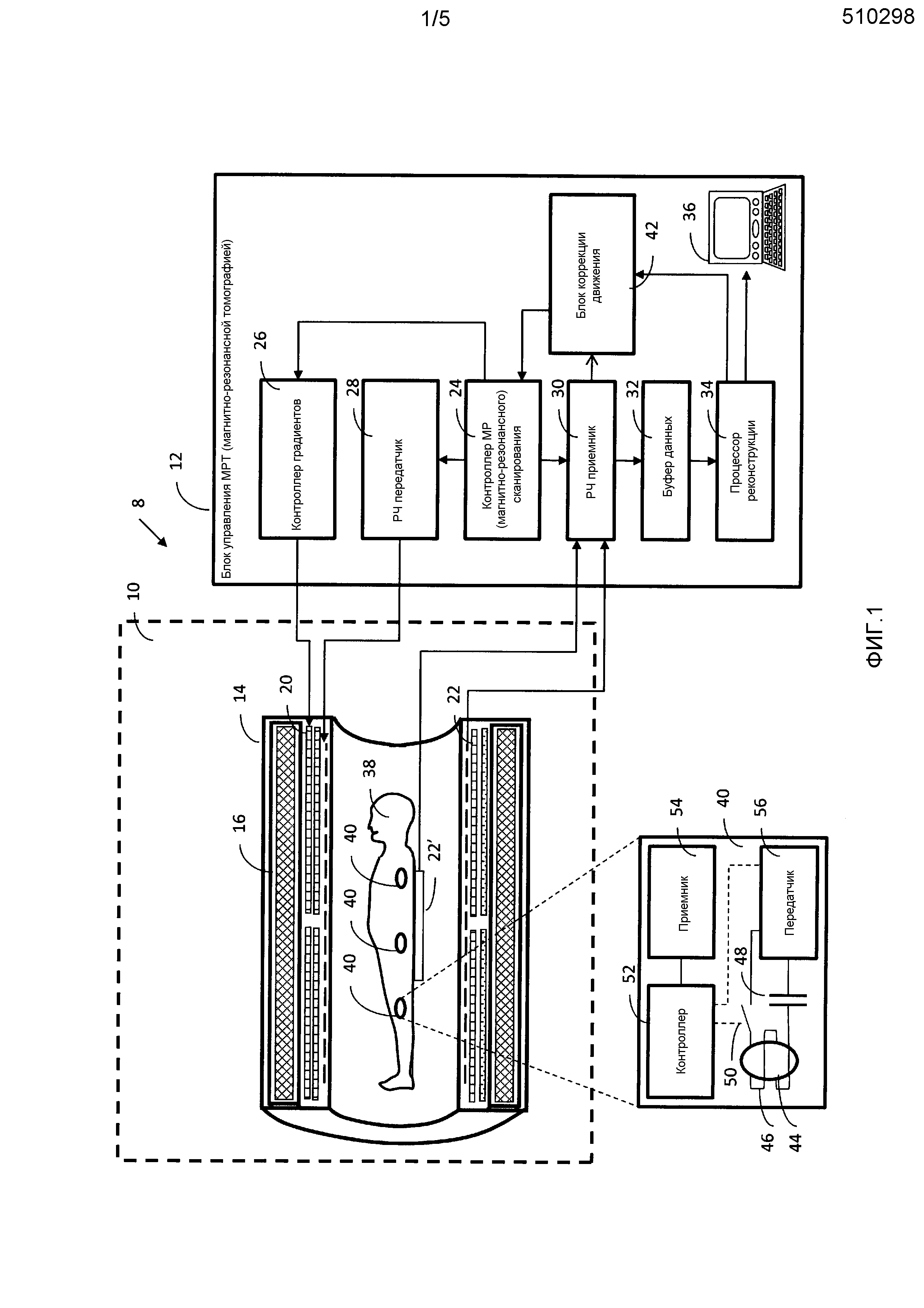
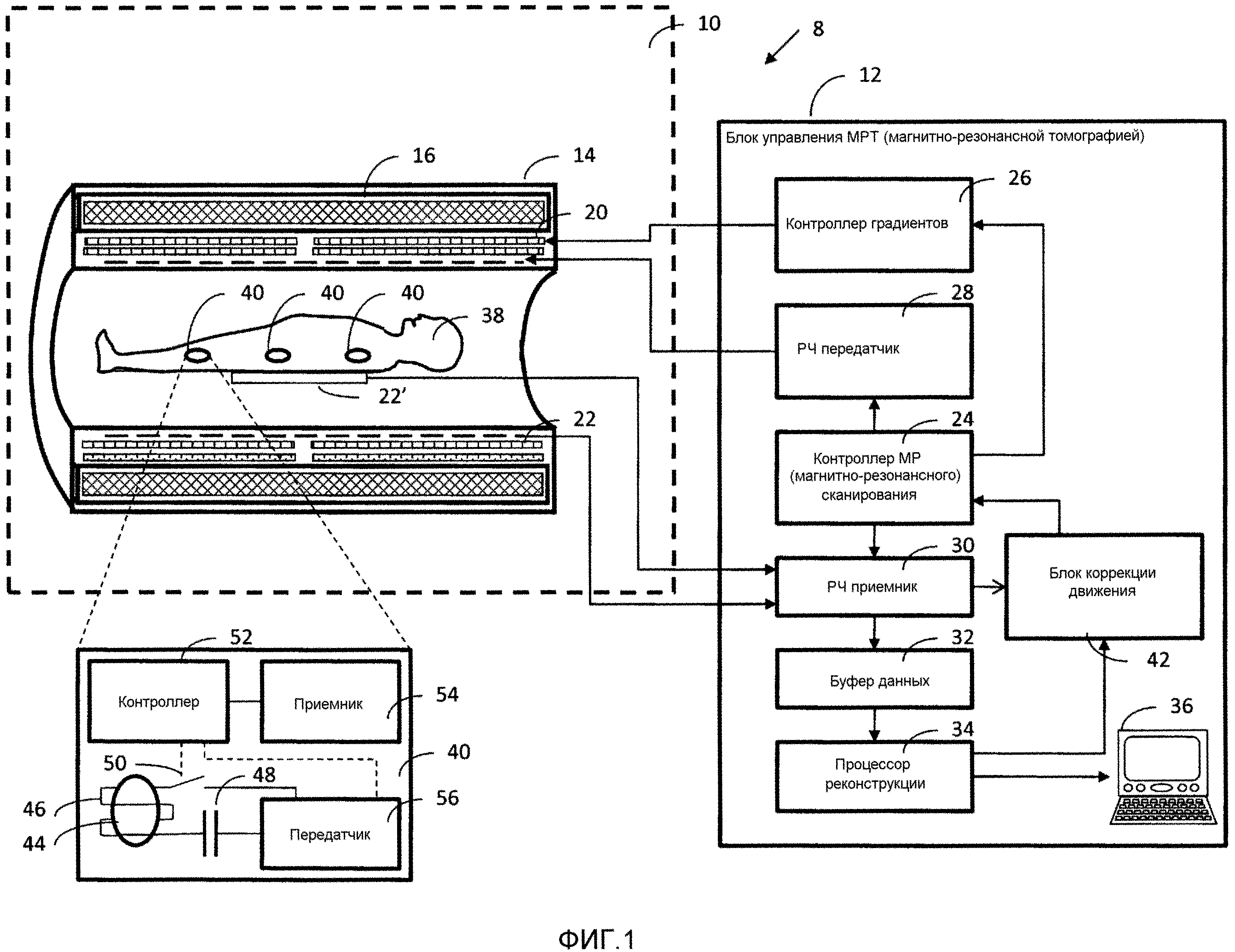
На фиг. 1 поясняется система 8 магнитно-резонансного (МР) сканирования выполнения перспективной коррекции движения (PMC) с использованием сканера 14 для магнитно-резонансной томографии (МРТ сканера), в соответствии с различными вариантами осуществления, описанными в настоящей заявке. Методы PMC заключаются в измерении изменений геометрии, обусловленных движением объекта обследования во время сбора временных последовательностей (например, во время сканирования). Движение объекта обследования корректируется в реальном времени в сканере, что дает, в результате, повышение точности объемного совмещения в последовательностях изображений. МР система 8 включает в себя беспроводные устройства одноразового применения для измерения движения в реальном времени, допускающего выполнение динамических корректировок. Таким образом, положение и перемещение пациента можно обнаруживать в реальном времени, и в геометрические схемы сканирования, параметры реконструкции и т.п. можно вносить регулировки в реальном времени, по мере того как пациент движется во время сканирования (например, в течение 10 минут, 30 минут и т.п.).
На фиг. 1 показан экранированный от радиопомех кабинет МРТ 10, расположенный вблизи помещения для управления МРТ, которое включает в себя блок 12 управления МРТ для управления работой МРТ сканера 14. При этом экранирование от радиопомех обеспечено огораживанием кабинета медными листами, металлической фольгой, плазмой, стеклом с высоким содержанием металла (например, металлической сеткой) или другим материалом, подходящим для экранирования от радиопомех, например, проволочной сеткой. МРТ сканер 14 включает в себя основной магнит 16, который формирует постоянное во времени однородное поле B0 через обследуемую область 18. Основной магнит может быть магнитом кольцевого или туннельного типа, C-образным открытым магнитом, открытым магнитом других конструкций и т.п. Градиентные магнитные катушки 20, расположенные около основного магнита 16, служат для формирования градиентов магнитного поля вдоль выбранных осей относительно магнитного поля B0 для позиционного кодирования принимаемых сигналов. Радиочастотная катушка, например радиочастотная катушка 22 для всего тела, расположена вблизи обследуемой области для возбуждения резонансных и/или принимаемых РЧ (радиочастотных) сигналов. По желанию обеспечивают локальные, поверхностные или специальные трансректальные РЧ катушки 22' в дополнение к РЧ катушке 22 для всего тела или вместо нее.
Контроллер 24 сканирования управляет контроллером 26 градиента, который заставляет градиентные катушки подавать выбранные импульсы градиентов магнитного поля через область визуализации, в зависимости от выбранной последовательности магнитно-резонансной томографии или спектроскопии. Градиентные импульсы задают также центр визуализируемого объема, ориентации x-, y- и z-координат визуализируемого объема и т.п. Контроллер 24 сканирования управляет также РЧ передатчиком 28, который заставляет РЧ катушки для всего тела или локального типа генерировать импульсы поля B1 для возбуждения магнитного резонанса и манипуляции им. Контроллер 24 управления сканированием управляет также РЧ приемником 30, который подсоединен к РЧ катушкам для всего тела или локального типа для приема из них магнитно-резонансных сигналов. МРТ сканер 14 работает с управлением от контроллера 24 сканирования в соответствии с выбранной последовательностью для возбуждения магнитного резонанса.
Полученные данные из РЧ приемника 30 временно хранятся в буфере 32 данных и обрабатываются процессором 34 реконструкции магнитного резонанса. Процессор 34 реконструкции магнитного резонанса может выполнять различные функции, которые известны в данной области техники, в том числе реконструкцию изображений, магнитно-резонансную спектроскопию, локализацию катетера или интервенционного инструмента и т.п. Реконструированные магнитно-резонансные изображения, спектроскопические показания, информация о местоположении интервенционного инструмента и другие обработанные МР данные отображаются на графическом пользовательском интерфейсе 36. Графический пользовательский интерфейс 36 также включает в себя устройство для пользовательского ввода, которым врач может воспользоваться для управления контроллером 24 сканирования, чтобы подбирать последовательности и протоколы для сканирования и т.п.
По меньшей мере, три маркера 40, прикрепленные к пациенту 38, используют для определения движения и/или положения пациента 38. Блок 42 коррекции движения в блоке 12 управления МРТ использует маркеры 40 для перспективной коррекции движения и обновления в реальном времени параметров сканирования. Маркеры 40 размещены на пациенте так, чтобы можно было обнаруживать составляющие перемещения вдоль x-, y- и z-осей и составляющие поворотного перемещения вокруг упомянутых осей. В частности, блок 42 коррекции движения анализирует данные положения и, в частности, для периодического движения использует модели движения для измерения и прогнозирования движения пациента во время сканирования. Маркеры 40 настраивают соответственно конкретной резонансной частоте. Маркеры 40 включают в себя камеру, которая содержит материал 44, который резонирует на подходящей резонансной частоте вблизи, но со смещением от частоты визуализации в присутствии основного магнитного поля. Подходящие материалы включают в себя раствор NaCl, сульфат меди, растворенный в воде, витамин E и т.п. Резонансная частота пропорциональна напряженности магнитного поля. Соответственно, в присутствии градиента магнитного поля резонансная частота изменяется вдоль направления градиента. Для определения положения в x-направлении, например, создают x-градиент. В таком случае, резонансная частота указывает положение по x-направлению. Последовательным созданием x-, y- и z-градиентов и измерением частоты легко определяется положение материала по x-, y- и z-направлениям, т.е. x-, y- и z-координатам. Аналогичным образом, x-, y- и z-градиенты можно использовать для создания фазового сдвига вдоль x-, y- и z-направлений.
Измерительная катушка 46 настраивается на резонансную частоту маркера посредством конденсатора 48 или подобного устройства. Компонент 50, например переключатель, работает с управлением от контроллера 52, например микроконтроллера, для настройки и расстройки измерительной катушки 46. Приемник 54 принимает управляющие сигналы из контроллера 24 МР сканирования, чтобы настраивать и расстраивать измерительную катушку 46. Контроллер 52 управляет также передатчиком 56 для передачи резонансного сигнала. В одном варианте осуществления, передача и прием осуществляются посредством РЧ сигнала на частоте, достаточно смещенной от частоты визуализации, чтобы не создавать помех, например, в стандарте Bluetooth. В другом варианте осуществления, передатчик 56 и приемник 54 передают и принимают оптические сигналы. В другом варианте осуществления, сигналы являются акустическими. В другом варианте осуществления, МР катушки 22, 22' передают и принимают команды. В другом варианте осуществления, передатчик является индуктивной связью между катушкой 46 и РЧ катушкой 20, 22'. Предусмотрено применение как аналоговых, так и цифровых сигналов.
РЧ и градиентные импульсы для измерения положения разделены промежутками в визуализирующей последовательности, например, за РЧ импульсом возбуждения следует три ортогональных градиентных импульса. Контроллер 24 МР сканирования вынуждает контроллер 54 маркеров расстраивать измерительную катушку 46 для маркеров во время визуализации и настраивать измерительную катушку 46 для маркеров во время каждого из градиентных импульсов для измерения положения и передатчик 56 передавать сигналы показания движения.
РЧ приемная катушка 22, 22' обнаруживает резонансные частоты, выдаваемые маркерами 40, и передает информацию в процессор 34 реконструкции. Блок 42 коррекции движения использует данные обнаруженных резонансных частот для формирования позиционной информации, указывающей положение маркеров 40, в частности положение области интереса относительно центра визуализируемого объема и поворота относительно начальных осей координат визуализируемого объема. В одном варианте осуществления, позиционную информацию, сформированную на основании маркеров 40, используют для модификации параметров сканирования сканирующей последовательности для ввода поправок на движение пациента. Например, область визуализации сдвигается, поворачивается и т.п. для сохранения области интереса в одинаковом относительном положении и ориентации. Для другого варианта осуществления, принятые резонансные сигналы перед реконструкцией подвергают регулировкам для коррекции движения.
Во время процедуры сканирования, РЧ импульс для определения местоположения маркера и, по меньшей мере, три ортогональных проекции подают время от времени в сканирующей последовательности, чтобы идентифицировать положения маркеров. В некоторых вариантах осуществления, РЧ импульс МР последовательности используют в целях как визуализации, так и определения местоположения маркеров. Полученные данные используют для обновления параметров сканирования или реконструкции изображения в реальном времени. Данную задачу решают вводом нестационарных последовательностей импульсов для обнаружения движения, чередующихся с обычными визуализирующими последовательностями импульсов. В ответ на прием последовательностей импульсов для обнаружения движения, конкретные резонансные частоты, выдаваемые маркерами, служат для измерения маркеров 40 и, следовательно, движения пациента во время сканирования. Для компенсации движения пациента, параметры сканирования и/или реконструкции изображения подвергаются перспективной регулировке во время сканирования. Например, процедура сканирования включает в себя серию кадров получения изображений, которые включают в себя серию чередующихся последовательностей импульсов для обнаружения движения. Каждая последовательность для обнаружения движения включает в себя множество импульсов для обнаружения движения. Во время начальной последовательности для обнаружения движения, собранные импульсные сигналы обнаружения движения оцифровывают и сохраняют как опорные сигналы положения/поворота. Упомянутые опорные сигналы указывают положение пациента в начале сканирования и затем служат как опорные сигналы, с которыми можно сравнивать впоследствии собранные импульсные сигналы обнаружения движения. Конкретные резонансные частоты, принятые от маркеров, обрабатывают для вычисления поступательного перемещения пациента вдоль соответствующих x-, y- и z-осей и поворотного перемещения пациента. Перемещения вычисляют сравнением сигналов положения/поворота, собранных во время сканирования, с опорными сигналами положения/поворота, собранными в начале сканирования. Видя периодические перемещения, ускорения, траектории и т.п., можно спрогнозировать будущие положения.
Блок 12 управления МРТ, контроллер 24 МР сканированием, контроллер 26 градиентов, процессор 34 реконструкции, графический пользовательский интерфейс 36 и блок 42 коррекции движения в изображенном варианте осуществления включают в себя, по меньшей мере, один процессор, например микропроцессор или другое программно-управляемое устройство, сконфигурированное с возможностью исполнения программного обеспечения для перспективной коррекции движения, чтобы выполнять операции, дополнительно подробнее описанные ниже. Обычно, программное обеспечение для перспективной коррекции движения содержится в физической памяти или на компьютерно-считываемом носителе информации для исполнения процессором. Типы долговременных компьютерно-считываемых носителей информации включают в себя такую память, как накопитель на жестких дисках, CD-ROM, DVD-ROM, Internet-серверы и т.п. Предусмотрены также другие варианты исполнения процессора. Контроллеры отображения, специализированные интегральные схемы (ASIC), FPGA (программируемые пользователем вентильные матрицы) и микроконтроллеры являются наглядными примерами других типов компонента, который может быть реализован для обеспечения функций процессора. Варианты осуществления могут быть реализованы с использованием программного обеспечения для исполнения процессором, аппаратными средствами или каким-то их сочетанием.
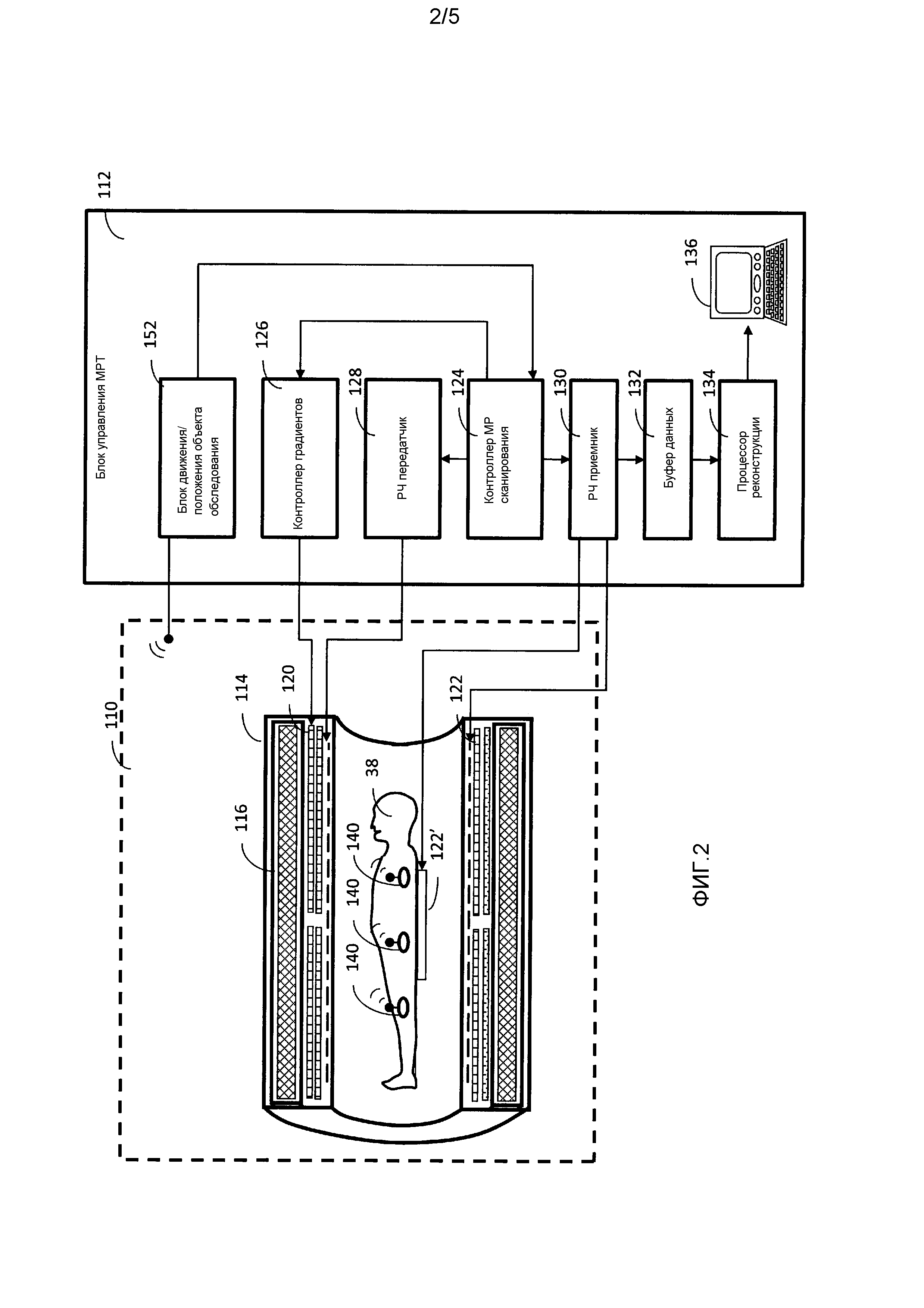
На фиг. 2 и 3 представлен другой вариант осуществления беспроводной системы коррекции движения. Экранированный от радиопомех кабинет 110 для исследований методом магнитно-резонансной томографии (МРТ) расположен вблизи помещения для управления МРТ, которое включает в себя блок 112 управления МРТ для управления работой МРТ сканера 114. МРТ сканер 114 включает в себя основной магнит 116, который формирует постоянное во времени однородное поле B0 через обследуемую область 118, при этом градиентные магнитные катушки 120, расположенные около основного магнита 116, служат для формирования градиентов магнитного поля вдоль выбранных осей относительно магнитного поля B0, и радиочастотная катушка, например радиочастотная катушка 122 для всего тела, расположена вблизи обследуемой области.
Контроллер 124 сканирования управляет контроллером 126 градиентов, который заставляет градиентные катушки подавать выбранные импульсы градиентов магнитного поля через область визуализации, в зависимости от выбранной последовательности магнитно-резонансной томографии или спектроскопии. Контроллер 124 сканирования управляет также РЧ преобразователем 128, который заставляет РЧ катушки для всего тела или локального типа генерировать импульсы поля B1 для возбуждения магнитного резонанса и манипуляции им. Контроллер 124 сканирования управляет также РЧ приемником 130, который подсоединен к РЧ катушкам 122, 122' для всего тела или локального типа для приема из них магнитно-резонансных сигналов.
Полученные данные из РЧ приемника 130 временно сохраняются в буфере 132 данных и обрабатываются процессором 134 реконструкции магнитного резонанса. Реконструированные магнитно-резонансные изображения, спектроскопические показания, информация о местоположении интервенционного инструмента и другие обработанные МР данные отображаются на графическом пользовательском интерфейсе 136. Графический пользовательский интерфейс 136 включает в себя также устройство для пользовательского ввода, которым врач может воспользоваться для управления контроллером 124 сканирования, чтобы подбирать последовательности и протоколы для сканирования и т.п.
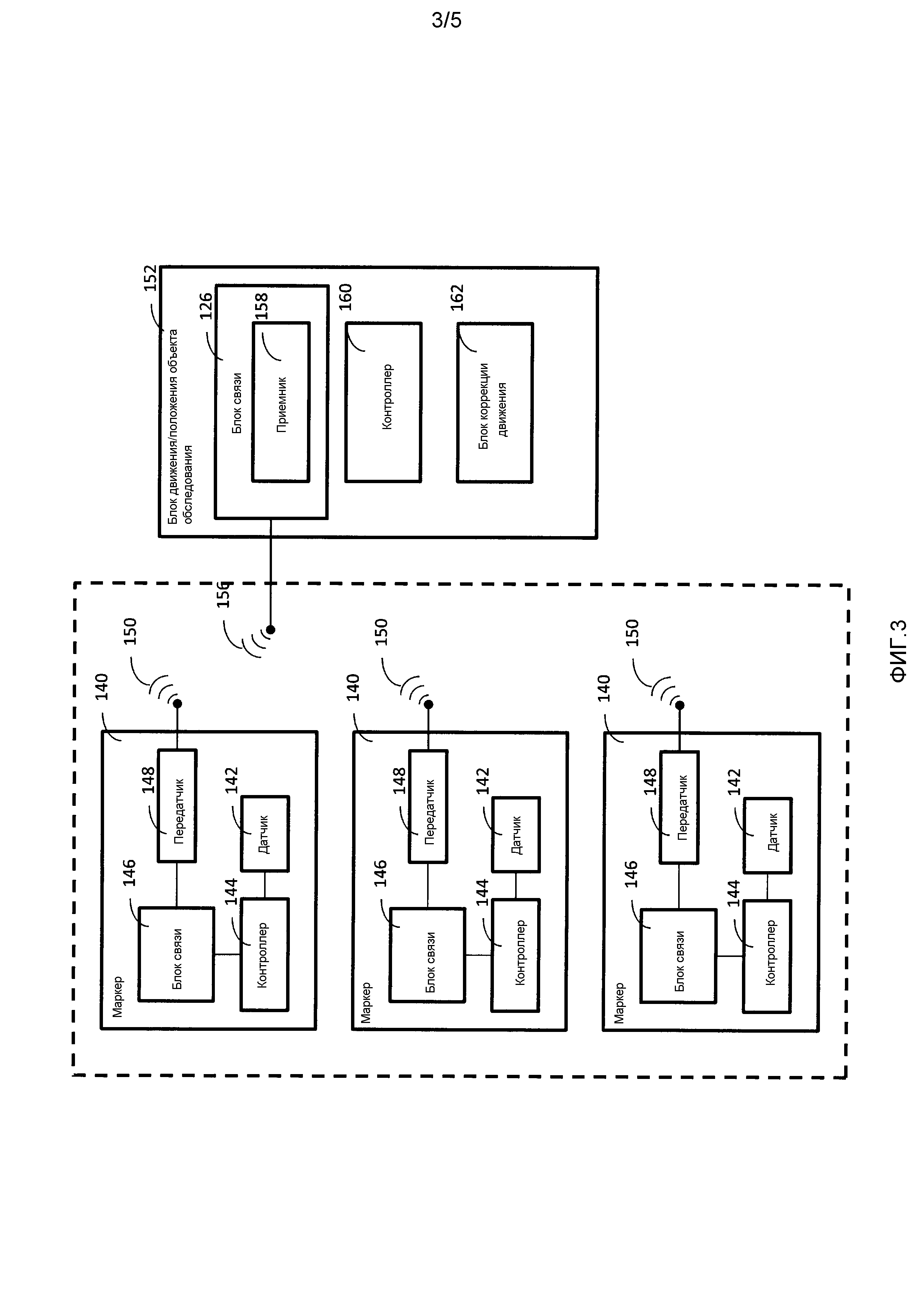
К пациенту 138 прикреплены, по меньшей мере, три маркера 140 для измерения движения пациента 138 или представляющего интерес объема или органа и для формирования данных перемещения пациента, указывающих упомянутое перемещение. Каждый из маркеров 140 включает в себя, по меньшей мере, один датчик 142, который обнаруживает, по меньшей мере, одно из местоположения, ориентации, изменения местоположения, изменения ориентации и т.п. пациента 138. Маркеры 140 размещены на пациенте так, чтобы можно было измерять относительное перемещение вдоль x-, y- и z-осей и относительное поворотное перемещение вокруг упомянутых осей. Датчики 142 включают в себя акселерометры, гироскопы, элементы на эффекте Холла и т.п., которые могут обеспечивать информацию о местоположении и перемещении пациента 138. Например, акселерометр в маркере 140 измеряет направление и скорость каждого перемещения пациента и формирует данные перемещения пациента, указывающие перемещение. Разумеется, с маркером 140 могут быть связаны другие датчики 142, и не все из вышеупомянутых датчиков 142 должны быть связаны с маркером 140 в любой данный момент времени.
Датчики 142 передают сформированные данные перемещения в контроллер 144 соответствующего маркера 140. Контроллер 144 служит пунктом сбора данных перемещения, измеренных датчиком 142, и обеспечивает временное хранилище для данных. Маркер 140 может получать питание от батареи или питание, индуктивно отбираемое из последовательности МРТ. Контроллер 144 соединен с блоком 146 связи, который передает сформированные данные перемещения беспроводным способом. Сформированные данные перемещения могут передаваться непрерывно или периодически. Маркер 140 включает в себя передатчик 148 и антенну 150 для беспроводной передачи сформированных данных перемещения в блок 152 движения/положения объекта обследования блока 112 управления МРТ. Следует понимать, что, хотя для каждого маркера 140 показана только одна антенна 150, предусмотрена возможность применения большего числа антенн. Передатчик 148 может быть РЧ передатчиком, работающим на частоте системы визуализации, акустическим приемопередатчиком, ИК (инфракрасным) или другим оптическим приемопередатчиком и т.п.
Блок 152 движения/положения объекта обследования блока 112 управления МРТ, в показанном варианте осуществления, включает в себя блок 154 связи, который управляет приемником 158, и одну антенну 156, продолжающуюся через экран от радиопомех кабинета 110 для исследований МРТ, чтобы принимать сформированные данные перемещения из маркеров. Антенна 156 блока движения/положения объекта обследования изображена расположенной, например, на экранированной от радиопомех стенке кабинета 110 для исследований МРТ. Следует также понимать, что антенна 156 блока движения/положения объекта обследования расположена на экранированной от радиопомех стенке кабинета 110 для исследований МРТ таким образом, чтобы частота связи передавала сигналы через экран в помещение для управления. Кроме того, следует также понимать, что, хотя на схеме показана только одна антенна 156, предусмотрена возможность применения большего числа антенн. Линии связи между приемопередатчиком 148 и приемопередатчиком 158 могут быть оптическими, акустическими, РЧ или комбинированными.
Блок 154 связи передает сформированные данные перемещения в контроллер 160 в блоке 152 перемещения/положения объекта обследования, который служит пунктом сбора данных перемещения, измеренных датчиками 142 и обеспечивает временное хранилище данных. Контроллер 160 соединен с блоком 162 коррекции движения, который определяет движение или относительное положение пациента 138 по данным перемещения. Блок 162 коррекции движения также анализирует данные перемещения с использованием, по меньшей мере, общеизвестного алгоритма перспективной коррекции движения для компенсации перемещения пациента во время сканирования. Блок 162 коррекции движения применяет данные перемещения с использованием, по меньшей мере, общеизвестного алгоритма перспективной коррекции движения и формирует относительную позиционную информацию, характеризующую положение пациента 38. Позиционную информацию, сформированную по маркерам 140, используют для модификации параметров сканирования сканирующей последовательности или параметров реконструкции, чтобы ввести поправки на движение пациента, как изложено выше. Можно отметить, что не обязательно определять абсолютное положение маркера, достаточно только относительного положения. Можно выбрать произвольное положение и воспользоваться информацией о движении для коррекции и формирования изображений в выбранном произвольном положении.
Блок 112 управления МРТ, контроллер 124 МР сканирования, контроллер 126 градиентов, процессор 134 реконструкции, графический пользовательский интерфейс 136, блок 152 движения/положения объекта обследования, блок 158 связи и блок 162 коррекции движения в изображенном варианте осуществления включают в себя, по меньшей мере, один процессор, например микропроцессор или другое программно-управляемое устройство, сконфигурированное с возможностью исполнения программного обеспечения для перспективной коррекции движения, чтобы выполнять операции, дополнительно, более подробно описанные ниже. Обычно, программное обеспечение для перспективной коррекции движения содержится в физической памяти или на компьютерно-считываемом носителе информации для исполнения процессором. Типы долговременных компьютерно-считываемых носителей информации включают в себя такую память, как накопитель на жестких дисках, CD-ROM (постоянное запоминающее устройство на компакт-диске), DVD-ROM (постоянное запоминающее устройство на универсальном цифровом диске), Internet-серверы и т.п. Предусмотрены также другие варианты исполнения процессора. Контроллеры отображения, специализированные интегральные схемы (ASIC), FPGA (программируемые пользователем вентильные матрицы) и микроконтроллеры являются наглядными примерами других типов компонента, который может быть реализован для обеспечения функций процессора. Варианты осуществления могут быть реализованы с использованием программного обеспечения для исполнения процессором, аппаратными средствами или каким-то их сочетанием.
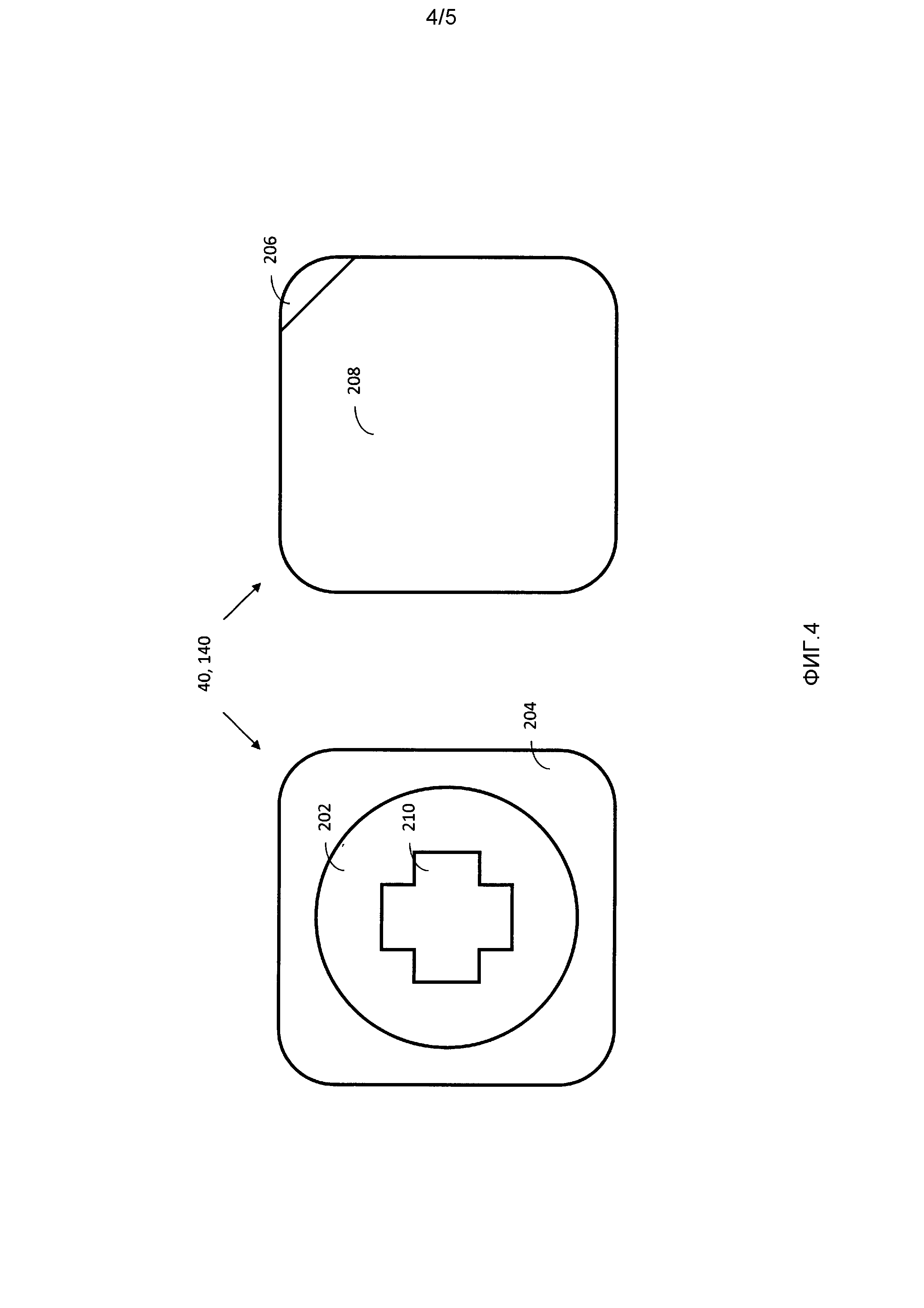
На фигуре 4 изображен беспроводной маркер 40, 140 движения. Маркер включает в себя устройство 202 движения, которое используют для определения движения пациента. Устройство движения включает в себя устройства, которые доставляют информацию о движении, например варианты осуществления, представленные на фиг. 1 или 3, как изложено выше. Устройство 202 движения закреплено на верхней поверхности 204 адгезивного слоя 206. На адгезивную накладку наложена съемная подложка 210, которую снимают для закрепления маркеров на пациенте. Вместо нахождения устройства 202 движения на верхней поверхности, упомянутое устройство может находиться на нижней адгезивной поверхности. Подложка находится на аксиальном участке или участке накладки вокруг устройства движения. Перед процедурой сканирования, съемную подложку 208 снимают, и маркер 40, 140 размещают на пациенте в подходящем местоположении для определения движения. Например, множество маркеров можно разместить на нижней части туловища, средней части туловища и верхней части туловища пациента, чтобы обнаруживать перемещение грудной клетки пациента, например перемещение диафрагмы во время дыхания. Размер, форма и число маркеров может изменяться соответственно подлежащему контролю движению и способу беспроводной перспективной коррекции движения. Следует понимать, что устройство движения может иметь небольшой диаметр около 1 миллиметра, но адгезивная накладка большего размера может облегчать ручное наложение. Маркеры 40, 140 могут быть упакованы в стерильных условиях в упаковку или оболочку. Следует также понимать, что маркеры 200 выполнены из материалов, которые являются дешевыми и одноразовыми, чтобы, после использования маркеров 200, маркеры 200 можно было выбрасывать. На маркеры может быть нанесен визуальный указатель 210 для обозначения местоположения содержащего элемента определения движения. Предполагается также, что маркеры дополнительно контролируют физиологические параметры пациента, например температуру и частоту сердечных сокращений.
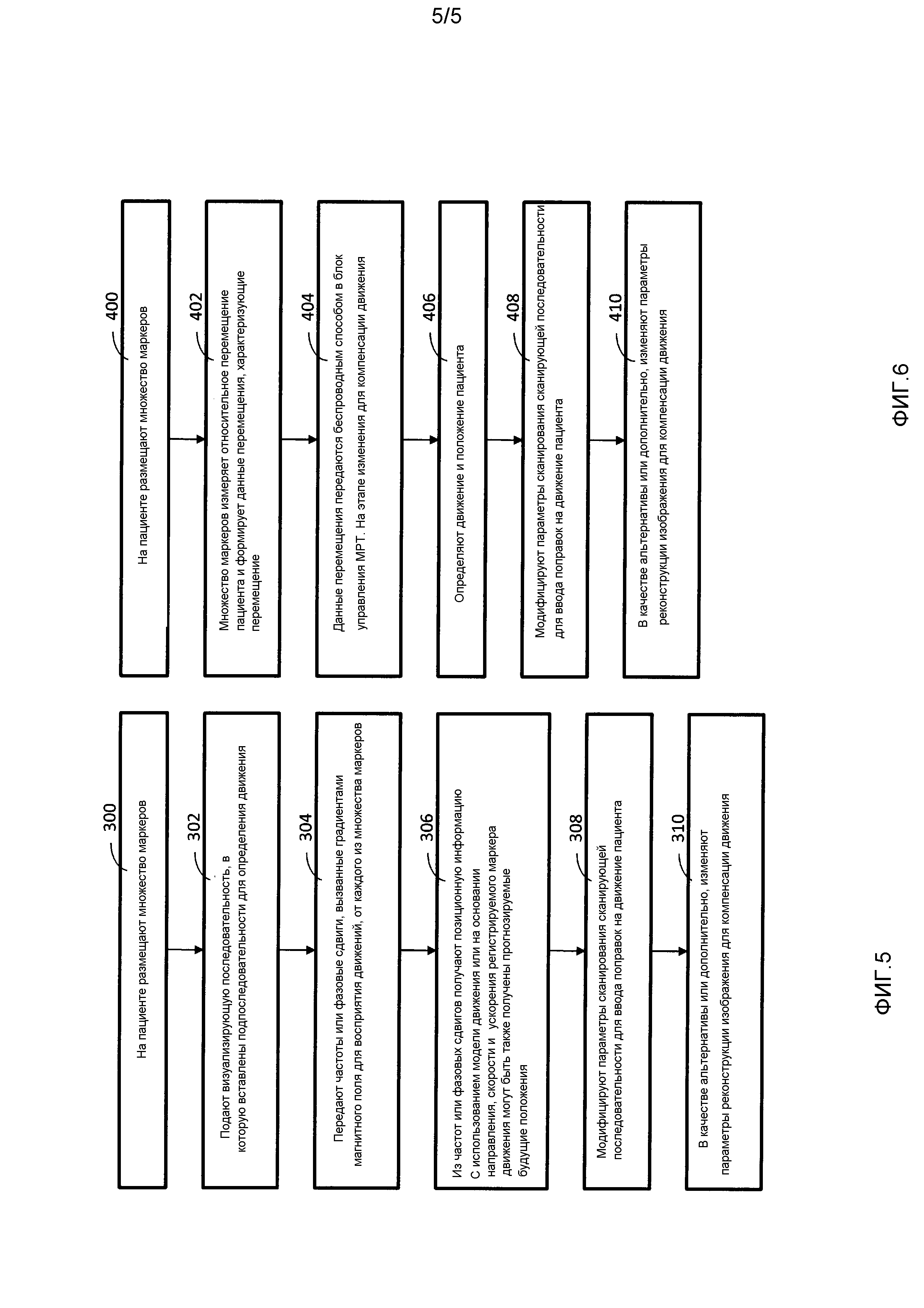
На фиг. 5 показана блок-схема последовательности операций способа работы беспроводной системы перспективной коррекции движения. На этапе 300, на пациенте размещают множество маркеров 40. На этапе 302 подают визуализирующую последовательность, в которую вставлены подпоследовательности для определения движения. На этапе 304 передаются частоты или фазовые сдвиги, вызванные градиентами магнитного поля для определения движений, от каждого из множества маркеров. На этапе 306, из данных частот или фазовых сдвигов выводят позиционную информацию. С использованием модели движения или на основании направления, скорости и ускорения обнаруживаемого маркера движения можно также оценить прогнозируемые на будущее положения. На этапе 308 модифицируют параметры сканирования сканирующей последовательности для ввода поправок на движение пациента. В качестве альтернативы или дополнительно, на этапе 310 изменяют параметры реконструкции изображения для компенсации движения.
На фиг. 6 показана блок-схема последовательности операций способа работы другого варианта осуществления беспроводной системы перспективной коррекции движения. На этапе 400, на пациенте размещают множество маркеров 140. На этапе 402 множество маркеров измеряет относительное перемещение пациента и формирует данные перемещения, характеризующие перемещение. На этапе 404, данные перемещения передаются беспроводным способом в блок управления МРТ. На этапе 406 определяют движение и положение пациента. На этапе 408 модифицируют параметры сканирования сканирующей последовательности для ввода поправок на движение пациента. В качестве альтернативы или дополнительно, на этапе 410 изменяют параметры реконструкции изображения для компенсации движения.
Выше описание настоящего изобретения приведено со ссылкой на предпочтительные варианты осуществления. После прочтения и изучения вышеприведенного подробного описания, специалистами могут быть созданы модификации и внесены изменения. Предполагается, что настоящее изобретение следует интерпретировать как включающее в себя все упомянутые модификации и изменения в той степени, насколько они попадают в пределы объема прилагаемой формулы изобретения или ее эквивалентов.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Быстрая параллельная реконструкция для произвольных траекторий к-пространства
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Быстрая параллельная реконструкция для произвольных траекторий к-пространства

