Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ УСТАНОВКИ НА СПУТНИКЕ ОРБИТАЛЬНОГО КОСМИЧЕСКОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области космической техники, в частности, к радиоастрономии, касается устройств, предназначенных для автоматического подъема, развертывания, пространственной ориентации и наведения на цель размещенных на спутнике различного вида и назначения орбитальных космических объектов (аппаратов, устройств), доставляемых на космическую орбиту в сложенном положении. Например, космических телескопов и радиотелескопов (интерферометров), лазерных, электромагнитных, электронных, нейтронных и всевозможных других излучателей и приемников излучения.
Космический объект, например, радиотелескоп, доставляемый на расчетную орбиту в сложенном положении, после занятия спутником на круговой орбите устойчивого равновесного состояния устанавливается в рабочее положение. То есть, космический объект в целом, или его рабочий орган (в радиотелескопе антенна с рефлектором и центральным узлом), имеющие собственный центр масс, поднимается (развертывается), стабилизируется и направляется (наводится) на цель. При этом равновесное состояние спутника на заданной орбите не должно быть нарушено, для чего центр тяжести поднимаемого объекта (или его рабочего органа) в процессе установки и после не должен отклоняться от общей гравитационной оси, проходящей через общий центр масс системы (спутник - объект) и центр масс планеты (Земли). В противном случае равновесное состояние будет нарушено и потребуется дополнительная корректировка положения спутника на расчетной орбите с помощью внешнего воздействия.
Известны устройства для установки (развертывания) орбитального космического объекта на спутнике - космического радиотелескопа, имеющего собственный центр тяжести (масс), расположенный в поднимаемом рабочем органе - в центральном узле антенны, и доставляемого на орбиту в сложенном положении, включающие механизмы автоматического подъема, развертывания рефлектора, пространственной ориентации, стабилизации положения и наведения рабочего органа на цель (патенты RU 2214659, 2262784, 2382452). Наиболее близким к изобретению в функциональном отношении является устройство для установки (развертывания) космического радиотелескопа на спутнике, выполненное в виде телескопической мачты с изменяющейся длиной /1/. В транспортируемом положении эта мачта должна быть минимально короткой, а при развертывании рефлектора достаточно длинной (не менее диаметра рефлектора). При этом телескопическая мачта при установке не должна нарушать равновесного положения спутника, быть достаточно жесткой и устойчивой, чтобы исключить отклонения, прогибы и колебания и обеспечить надежность и качество работы.
Недостаток известного устройства в виде телескопической мачты заключается в том, что она состоит из множества отдельных соединенных друг с другом элементов, например, вставленных друг в друга патрубков. При подъеме достаточно высокой мачты, например, для установки радиотелескопа большого диаметра сложно без дополнительных конструкций и компенсирующих отклонения устройств обеспечить необходимую жесткость и динамическую устойчивость конструкции под действием массовых гравитационных, центробежных и прочих инерционных сил /2/. Тем самым избежать смещения центра масс от общей со спутником гравитационной оси и не нарушить равновесного состояния. Кроме того, от неравномерного нагрева и охлаждения мачта может периодически (а при большой длине значительно) искривляться, нарушая равновесие, стабильность положения, точность наведения на цель. От этих недостатков снижаются надежность и качество работы самого космического объекта, например, из-за искривления рефлектора радиотелескопа.
С целью сохранения равновесия на орбите при установке на спутнике космического объекта (например, радиотелескопа), или его рабочего органа (в радиотелескопе - антенны с радиометром и рефлектором), исключением при подъеме смещения центра масс от общей гравитационной оси, и повышения при этом надежности (устойчивости, стабилизации положения) и качества (расширения обзора, точности пространственной ориентации и наведения на цель) работы, и предлагается данное изобретение.
Поставленная цель - сохранение равновесного состояния на орбите исключением смещения центра масс от оси гравитационного притяжения, при повышении надежности и качества работы достигается тем, что устройство для установки на спутнике орбитального космического объекта, (например, космического радиотелескопа), доставляемого на орбиту в сложенном положении, и включающее механизмы автоматического подъема, пространственной ориентации, стабилизации положения и наведения на цель, выполнено состоящим из пары расположенных в одной вертикальной плоскости идентичных по конструкции и сбалансированных по массе, и установленных симметрично относительно оси гравитационного притяжения прямолинейно-направляющих механизмов, имеющих закрепленную на спутнике общую горизонтальную траверсу и подвижные консоли, соединенные серединами шарнирно рычагами половинной длины консоли с установленной на траверсе по оси гравитационного притяжения общей опорой. При этом верхними концами консоли соединены подвижно с опорными элементами места нахождения центра масс космического объекта, а нижними концами - шарнирно с установленными подвижно на общей траверсе по обе стороны от общей опоры ползунами, связанными с приводным устройством, с возможностью их одновременного и синхронного, но, во взаимно противоположных направлениях перемещения по траверсе.
При этом приводное устройство, обеспечивающее одновременное синхронное (в общем случае, возвратно-поступательное) перемещение ползунов и тем самым подъем и опускание консолей прямолинейно-направляющих механизмов, а вместе с ними космического объекта (или его рабочего органа), состоит из одинаковых связанных с согласовательным устройством электродвигателей, закрепленных на ползунах неподвижными роторами, на подвижных статорах которых надеты шестерни, установленные в зацеплении с выполненной с зубчатой поверхностью траверсой.
Положительный технический результат - исключение при установке (подъеме-опускании) космического объекта возможности отклонения (смещения) центра масс от общей со спутником оси гравитации, обеспечивается геометрическим свойством конструкции собственно прямолинейно-направляющего механизма, в которой конец консоли (соединенный с местом расположения центра масс космического объекта) перемещается строго по прямолинейной траектории. А также уравновешенностью устройства в целом, обеспечиваемой использованием, именно, пары идентичных по конструкции и сбалансированных по массе прямолинейно-направляющих механизмов, и симметричностью их взаимного расположения в одной вертикальной плоскости относительно общей прямолинейной траектории, совпадающей с общей со спутником осью гравитации.
В другом варианте, с целью повышения надежности и качества работы за счет увеличения жесткости и устойчивости конструкции, описываемое устройство выполнено состоящим из двух идентичных по конструкции и взаимно сбалансированных по массе пар прямолинейно-направляющих механизмов, установленных взаимно параллельно в вертикальных плоскостях прямо напротив друг друга и симметрично относительно оси гравитационного притяжения. Причем каждая из этих взаимно параллельных пар прямолинейно-направляющих механизмов состоит из пары расположенных в одной вертикальной плоскости идентичных по конструкции и сбалансированных по массе, и установленных симметрично относительно оси гравитационного притяжения прямолинейно-направляющих механизмов, имеющих закрепленную на спутнике общую горизонтальную траверсу и подвижные консоли, соединенные серединами шарнирно рычагами половинной длины консоли с установленной на траверсе по оси гравитационного притяжения общей опоре. При этом находящиеся друг против друга консоли взаимно параллельных пар прямолинейно-направляющих механизмов верхними концами соединены подвижно с опорными элементами места нахождения центра масс космического объекта, а нижними концами консоли в каждой паре прямолинейно-направляющих механизмов с общей траверсой соединены шарнирно с установленными подвижно на траверсе по обе стороны от общей опоры ползунами, связанными с приводным устройством с возможностью одновременного и синхронного, но во взаимно противоположных направлениях парного перемещения по траверсам находящихся друг против друга ползунов взаимно параллельных пар прямолинейно-направляющих механизмов.
Увеличение жесткости и устойчивости (статической и динамической), а потому более стабильное состояние обеспечиваются сдвоенностью и пространственной симметричностью и разнесенностью конструкции, увеличением площади опоры.
При этом приводное устройство, обеспечивающее одновременное синхронное возвратно-поступательное перемещение ползунов и тем самым подъем (при сдвигании) и опускание (при раздвигании) консолей прямолинейно-направляющих механизмов, а вместе с ними, соответственно, подъем и опускание космического объекта, состоит из связанных с согласовательным устройством одинаковых электродвигателей, закрепленных на ползунах прямолинейно-направляющих механизмов неподвижными статорами, на противоположных концах вала роторов которых надеты шестерни, установленные в зацеплении с выполненными с зубчатой поверхностью траверсами.
При этом с целью повышения надежности за счет большей синхронизации перемещений, а также сокращения образующих приводное устройство количества электродвигателей, находящиеся друг против друга ползуны взаимно параллельных пар прямолинейно-направляющих механизмов попарно жестко соединены (скреплены) между собой или общим корпусом, или перемычками с возможностью совместного их парного перемещения по траверсам.
В другом варианте, приводное устройство выполнено состоящим из связанных с согласовательным устройством одинаковых электродвигателей, закрепленных неподвижными статорами на спутнике, и установленных параллельно между траверсами взаимно параллельных пар прямолинейно-направляющих механизмов двух одинаковых и с однонаправленными винтовыми линиями соосных винтовых стержней, одни концы которых шарнирно установлены в закрепленной на спутнике общей опоре, расположенной в середине между траверсами по оси гравитационного притяжения, а противоположные концы механически связаны с валами роторов вышеуказанных электродвигателей. При этом на винтовых стержнях установлены гаечные элементы, закрепленные на соединяющих попарно ползуны перемычках, с возможностью при одновременном разнонаправленном вращении совместно с валами роторов электродвигателей винтовых стержней синхронного, но во взаимно противоположных направлениях перемещения совместно с гаечными элементами пар ползунов.
В следующем варианте приводное устройство выполнено состоящим из связанных с согласовательным устройством одинаковых электродвигателей, закрепленных неподвижными статорами на спутнике, и установленных параллельно между траверсами взаимно параллельных пар прямолинейно-направляющих механизмов двух одинаковых, но с разнонаправленными (правой и левой) винтовыми линиями соосных винтовых стержней, одни концы каждого из которых шарнирно установлены в закрепленной на спутнике общей опоре, расположенной в середине между траверсами по оси гравитационного притяжения, а противоположные концы механически связаны с валами роторов вышеуказанных электродвигателей. При этом на винтовых стержнях установлены гаечные элементы, закрепленные на соединяющих попарно ползуны перемычках, с возможностью при одновременном однонаправленном вращении совместно с валами роторов электродвигателей винтовых стержней синхронного, но во взаимно противоположных направлениях возвратно-поступательного перемещения совместно с гаечными элементами пар ползунов.
В обоих вышеописанных вариантах выполнения привода с использованием винтовых элементов обеспечивается единство и большая жесткость конструкции устройства в целом, а также возможность более точного, фиксируемого шаговым поворотом винта регулирования перемещений ползунов и тем самым перемещения (подъема-опускания) устанавливаемого космического объекта, в том числе, для наведения на цель.
При всем при этом с целью повышения качества работы возможностью поворота космического объекта в вертикальной плоскости при его установке (подъеме-опускании), в описываемом устройстве верхние концы консолей одних расположенных напротив друг друга прямолинейно-направляющих механизмов из взаимно параллельных пар соединены с опорными элементами места нахождения центра масс космического объекта шарнирно, а верхние концы консолей двух других расположенных напротив друг друга прямолинейно-направляющих механизмов из этих взаимно параллельных пар соединены (скреплены) жестко. Это дает возможность космическому объекту при его подъеме-опускании совершать совместно с этой парой консолей и поворот в вертикальной плоскости.
Положительный эффект при этом состоит в том, что для поворота космического объекта и наведения на цель не требуется отдельного привода. Наведение на цель может производиться путем подъема-опускания космического объекта на соответствующую высоту.
Недостаток такого технического решения - односторонность (не более 90 градусов) наведения, и необходимость для наведения производить регулируемые подъем-опускание консолей, что усложняет работу и точность наведения и не позволяет осуществлять круговой обзор.
Поэтому в другом варианте, с целью повышения качества работы точностью наведения и расширением обзора за счет управляемого поворота космического объекта в вертикальной плоскости до 180 градусов, в описываемом устройстве концы консолей расположенных напротив друг друга прямолинейно-направляющих механизмов взаимно параллельных пар соединены подвижно с опорными элементами места нахождения центра масс космического объекта, которые механически связаны с валами роторов одинаковых управляющих электродвигателей, установленных на концевых участках консолей с возможностью сохранения неподвижности их статоров. Для чего, например, на статорах закреплены пластины с дуговыми пазами, а на концевых участках вышеупомянутых консолей выполнены пальцы с возможностью при повороте консолей их свободного перемещения в этих пазах.
Изобретение поясняется на следующих чертежах.
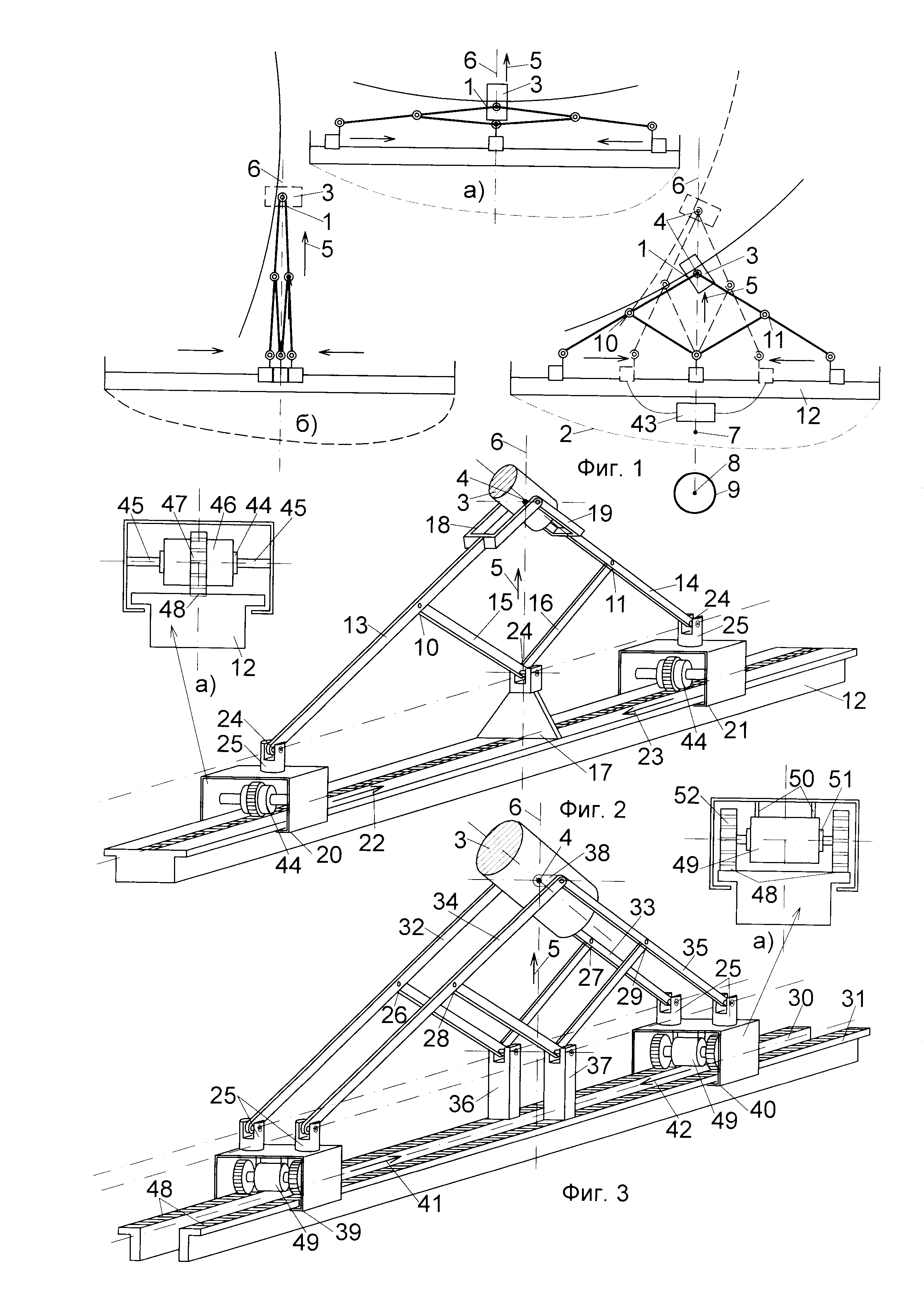
На фиг. 1 показана принципиальная конструктивная схема описываемого устройства.
На фиг. 2 показан вариант конструкции описываемого устройства с одной парой прямолинейно-направляющих механизмов с зубчатым приводным устройством.
На фиг. 3 показан вариант конструкции описываемого устройства с двумя взаимно параллельными парами прямолинейно-направляющих механизмов с зубчатым приводным устройством.
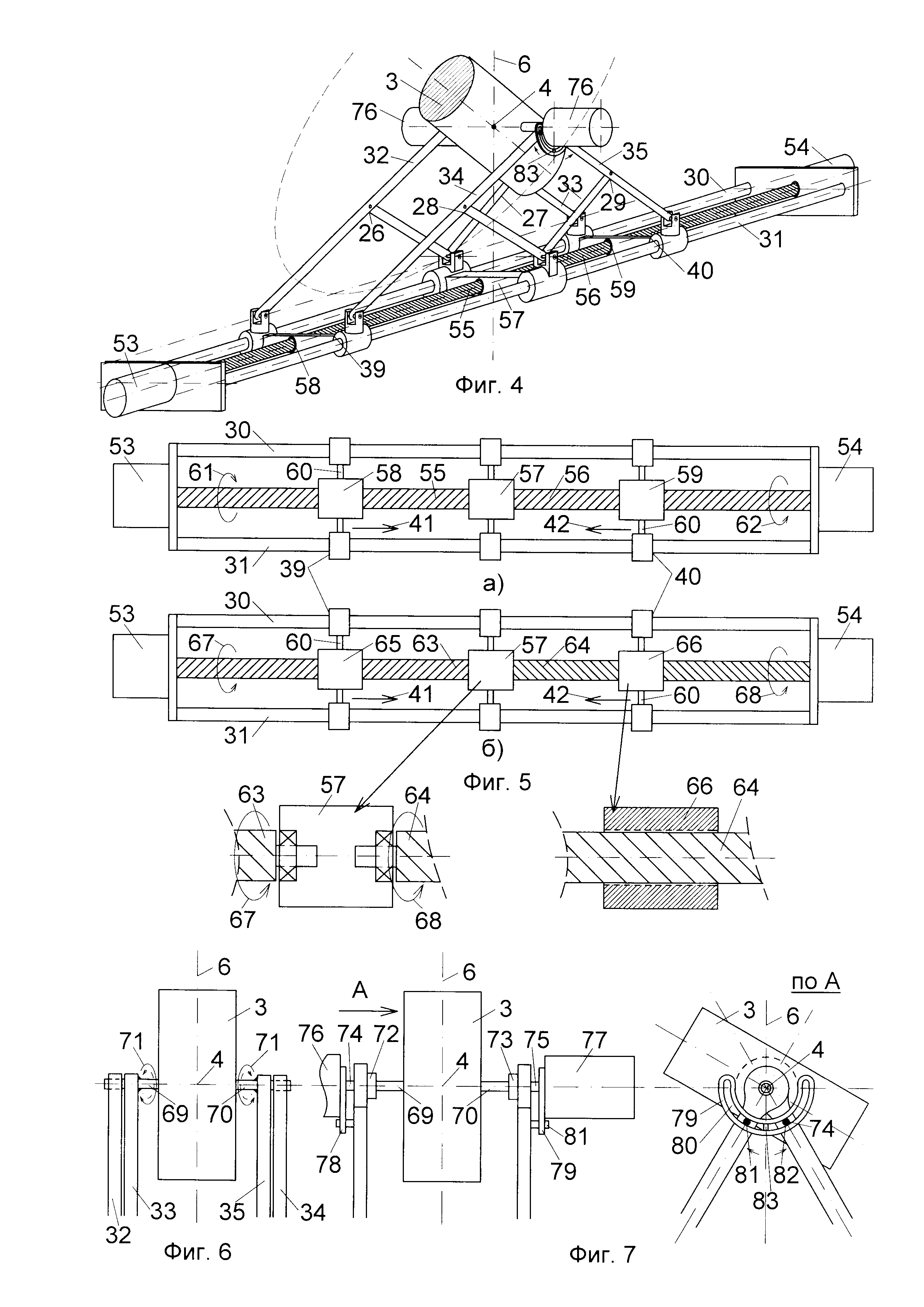
На фиг. 4 показан вариант конструкции описываемого устройства с двумя взаимно параллельными парами прямолинейно-направляющих механизмов с винтовым приводным устройством и устройством для управляемого поворота космического объекта в вертикальной плоскости.
На фиг. 5а, б показаны варианты конструкции винтового приводного устройства.
На фиг. 6 показана конструкция механизма поворота поднимаемого космического объекта в вертикальной плоскости.
На фиг. 7 показана конструкция устройства для управляемого поворота устанавливаемого космического объекта в вертикальной плоскости.
На фиг. 1 показана принципиальная конструктивная схема описываемого устройства 1 для установки на спутнике 2 орбитального космического объекта 3, который на чертеже (здесь и далее) показан в условном обобщенном изображении.
В качестве такого космического объекта 3 может иметься в виду любое генерирующее, излучающее и принимающее различного вида (типа) излучение (световое и электромагнитное, нейтронное и гамма частиц, рентгеновское, лазерное и т.д.) устройство, доставляемое на орбиту на спутнике 2 в сложенном (фиг. 1а) положении. В частности, таким объектом может быть космический радиотелескоп.
После занятия спутником 2 устойчивого равновесного состояния на орбите космический объект 3 (например, радиотелескоп) устанавливается в рабочее положение (фиг. 1б). То есть, космический объект 3 в целом или его рабочий орган (в радиотелескопе антенна с центральным узлом и рефлектором), имеющие собственный центр тяжести (масс) 4, поднимается (стрелка 5), стабилизируется и направляется (наводится) на цель. (Промежуточное положение на фиг. 1 показано пунктиром). Для этого описываемое устройство 1 содержит механизм автоматического подъема, пространственной ориентации, стабилизации положения и наведения объекта 3 (его рабочего органа) на цель. При этом равновесное состояние спутника 2 на заданной орбите не должно быть нарушено, для чего центр масс 4 устанавливаемого объекта 3, в процессе подъема и после установки не должен отклоняться от общей оси гравитационного притяжения 6, проходящей через центр масс (условно 7) спутника 2 (системы спутник - объект) и центр масс (условно 8) планеты 9 (Земли). В противном случае равновесное состояние будет нарушено и потребуется дополнительная корректировка положения спутника 2 на расчетной орбите с помощью внешнего воздействия.
Для сохранения орбитального равновесия при подъеме (стрелка 5) на спутнике 2 космического объекта 3 (или его рабочего органа) исключением смещения его центра масс 4 от общей гравитационной оси 6, описываемое устройство 1 выполнено состоящим из пары (10-11) идентичных по конструкции и сбалансированных по массе прямолинейно-направляющих механизмов, соответственно, 10 и 11, расположенных в одной вертикальной плоскости и установленных симметрично относительно оси гравитационного притяжения 6 (фиг. 2).
Прямолинейно-направляющие механизмы 10 и 11 содержат закрепленную на спутнике 2 общую горизонтальную траверсу 12 и подвижные консоли, соответственно, 13 и 14, соединенные своими серединами шарнирно рычагами 15 и 16 половинной длины консоли с закрепленной на траверсе 12 по оси гравитационного притяжения 6 общей опоре 17. При этом верхними концами консоли 13 и 14 соединены подвижно с местом нахождения центра масс 4 поднимаемого космического объекта 3 (или его рабочего органа). В данной конструкции - с концами 18 и 19 опорного элемента места нахождения центра масс 4, выполненного в виде двух полуосей. А нижними концами консоли 13 и 14 соединены шарнирно с установленными подвижно на траверсе 12 по обе стороны от общей опоры 17 ползунами, соответственно, 20 и 21, связанными с приводным устройством с возможностью их одновременного синхронного, но во взаимно противоположных направлениях (стрелки 22 и 23) перемещения по общей траверсе 12.
24 - здесь и далее шарнирные соединения.
Положительный технический результат достигается исключением отклонения (смещения) центра масс 4 поднимаемого объекта 3 или его рабочего органа (антенны с рефлектором радиотелескопа) от общей со спутником 2 оси гравитационного притяжения 6. Это обеспечивается известным геометрическим свойством собственно конструкции каждого из пары (10-11) прямолинейно-направляющих механизмов, в которых концы консолей 13 и 14 (совместно с центром масс 4 поднимаемого объекта 3) перемещаются (стрелка 5) строго по прямолинейной траектории, совпадающей с общей со спутником 2 осью гравитационного притяжения 6. А уравновешенность в целом обеспечивается идентичностью по конструкции и сбалансированностью по массе образующих эту пару прямолинейно-направляющих механизмов 10 и 11, а также симметричностью их взаимного и относительно общей прямолинейной траектории перемещения расположения в одной вертикальной плоскости.
Используемый в конструкции так называемый прямолинейно-направляющий механизм с его свойством, сам по себе, хорошо известен из общей теории механизмов и машин (ТММ). В изобретении пара таких механизмов, интегрированная в единую конструкцию, дает качественно новый положительный эффект - сохранение при движении устойчивого равновесного состояния.
В другом варианте, с целью повышения надежности и точности работы за счет увеличения жесткости и устойчивости конструкции, описываемое устройство выполнено состоящим из двух идентичных по конструкции и взаимно сбалансированных по массе пар прямолинейно-направляющих механизмов, установленных взаимно параллельно в вертикальных плоскостях прямо напротив друг друга и симметрично относительно общей оси гравитационного притяжения 6 (фиг. 3). Каждая из этих взаимно параллельных пар прямолинейно-направляющих механизмов (по аналогии с конструкцией на фиг. 2) состоит из пары (26-27) и пары (28-29) расположенных в одной вертикальной плоскости идентичных по конструкции и сбалансированных по массе прямолинейно-направляющих механизмов, соответственно, 26, 27 и 28, 29. Причем каждая из этих взаимно параллельных пар прямолинейно-направляющих механизмов имеет закрепленную на спутнике общую горизонтальную траверсу, соответственно, 30 и 31, и подвижные консоли, 32, 33 - в паре, (26-27) и 34, 35 - в паре (28-29), соединенные серединами шарнирно соответствующими рычагами половинной длины консоли с установленными на траверсах 30 и 31 симметрично и параллельно оси гравитационного притяжения 6 общих для каждой из этих пар опорами, соответственно, 36 и 37. При этом находящиеся друг напротив друга консоли 32, 34 и 33, 35 взаимно параллельных пар прямолинейно-направляющих механизмов верхними концами соединены подвижно с концами опорного элемента 38 места нахождения центра масс 4 поднимаемого (стрелка 5) космического объекта 3. А нижними концами указанные консоли в каждой из этих пар прямолинейно-направляющих механизмов соединены шарнирно с установленными подвижно на общей для каждой пары траверсе 30 и 31, по обе стороны от опор 36 и 37 ползунами, соответственно, 39 и 40, связанными с приводами с возможностью одновременного и синхронного, но во взаимно противоположных направлениях их парного перемещения по этим траверсам (стрелки 41 и 42).
Увеличение жесткости и устойчивости (статической и динамической), а также более стабильное состояние обеспечиваются сдвоенностью и пространственной симметричностью и разнесенностью конструкции, увеличением площади опоры.
При этом с целью повышения надежности работы за счет большей синхронизации перемещений, находящиеся друг против друга ползуны взаимно параллельных пар прямолинейно-направляющих механизмов попарно жестко соединены перемычками в единые пары 39 и 40 с возможностью совместного парного перемещения (стрелки 41 и 42) по траверсам 30 и 31 (фиг. 3).
Как в варианте конструкции описываемого устройства с одной парой (10-11) прямолинейно-направляющих механизмов (фиг. 2), так и в варианте конструкции с двумя парами (26-27) и (28-29) прямолинейно-направляющих механизмов (фиг. 3), приводное устройство для перемещения ползунов прямолинейно-направляющих механизмов выполнено состоящим из связанных с автономным энергоисточником и органом управления (на чертежах не показано) взаимосогласованных электродвигателей, установленных непосредственно на (в) ползунах.
Позицией 43 (см. фиг. 1) условно обозначено имеющееся на спутнике 2 управляющее согласовательное устройство какой-либо известной конструкции, обеспечивающее взаимосогласованную и синхронную работу входящих в приводное устройство электродвигателей.
В частности, приводное устройство для одновременного синхронного перемещения ползунов и тем самым согласованного подъема консолей прямолинейно-направляющих механизмов, а вместе с ними космического объекта или его рабочего органа (например, антенны радиотелескопа) может состоять из связанных с управляющим органом и согласовательным устройством 43 одинаковых электродвигателей 44, закрепленных, соответственно, на (в) ползунах 20 и 21 неподвижными валами 45 роторов, на подвижных статорах 46 которых надеты шестерни 47, установленные в зацеплении с выполненной с зубчатой поверхностью 48 траверсой 12 (см. фиг. 2 и выделенный фрагмент 2а).
В другом варианте (фиг. 3) приводное устройство состоит из связанных с общим управляющим органом и согласовательным устройством одинаковых электродвигателей 49, закрепленных неподвижными статорами 50 на сдвоенных парах ползунов 39 и 40 взаимно параллельных пар прямолинейно-направляющих механизмов. На противоположных концах вала 51 ротора этих электродвигателей 49 надеты шестерни 52, установленные в зацеплении с выполненными с зубчатой поверхностью 48 траверсами 30 и 31 (см. фиг. 3 и выделенный фрагмент 3а).
На фиг. 4 показана аналогичная фиг. 3 и с теми же обозначениями трубчатая конструкция описываемого устройства с единым винтовым приводным устройством и устройством для управляемого поворота устанавливаемого космического объекта 3 в вертикальной плоскости. А на фиг. 5а, б показаны возможные варианты конструкции этого единого винтового приводного устройства.
Винтовой привод выполнен состоящим из взаимосогласованных электродвигателей 53 и 54, закрепленных неподвижными статорами на спутнике, и установленных параллельно между выполненными трубчатыми траверсами 30 и 31 взаимно параллельных пар (26-27) и (28-29) прямолинейно-направляющих механизмов двух одинаковых соосных с однонаправленными винтовыми линиями винтовых стержней 55 и 56, одни концы каждого из которых шарнирно установлены в закрепленной на спутнике общей опоре 57, расположенной в середине между этими траверсами по оси гравитационного притяжения 6, а противоположные концы связаны напрямую, как показано на чертеже, или через какой-либо зубчатый передаточный механизм известной конструкции (на чертеже не показано) с валами роторов вышеуказанных электродвигателей (см. фиг. 4 и фиг. 5а). При этом на винтовых стержнях 55 и 56 установлены гаечные элементы, соответственно, 58 и 59, закрепленные на элементах (перемычках) 60, соединяющих пары 39 и 40 ползунов, с возможностью при одновременном разнонаправленном вращении совместно с валами роторов электродвигателей 53 и 54 этих винтовых стержней 55 и 56 одновременного синхронного, но, во взаимно противоположных направлениях (показано стрелками 61 и 62 перемещения (стрелки 40, 41) совместно с гаечными элементами 58 и 59 этих пар ползунов (фиг. 5а).
В другом варианте аналогичный винтовой привод выполнен состоящим из взаимосогласованных электродвигателей 53 и 54, закрепленных неподвижными статорами на спутнике, и установленных параллельно между траверсами 30 и 31 взаимно параллельных пар (26-27) и (28-29) прямолинейно-направляющих механизмов двух одинаковых соосных, но с разнонаправленной (правой и левой) винтовыми линиями винтовых стержней 63 и 64, одни концы каждого из которых шарнирно установлены в закрепленной на спутнике общей опоре 57, расположенной в середине между этими траверсами симметрично и параллельно оси гравитационного притяжения 6, а противоположные концы связаны напрямую или через какой-либо зубчатый передаточный механизм известной конструкции (на чертеже не показано) с валами роторов вышеуказанных электродвигателей (фиг. 5б). При этом на винтовых стержнях 63 и 64 установлены гаечные элементы, соответственно, 65 и 66, закрепленные на элементах (перемычках) 60, соединяющих пары 39 и 40 ползунов, с возможностью при одновременном однонаправленном (стрелки 67, 68) вращении совместно с валами роторов электродвигателей 53 и 54 этих винтовых стержней одновременного синхронного, но во взаимно противоположных направлениях (показано стрелками 41 и 42) перемещения совместно с гаечными элементами 65 и 66 этих пар ползунов.
При всем при этом во всех вариантах конструкции электродвигатели приводного устройства приводятся в действие от имеющегося на спутнике автономного энергоисточника, например, установленной на спутнике солнечной батареи (на чертеже не показано), а согласованное их взаимодействие обеспечивается согласователем (условно 43 фиг. 1), связанным с имеющимся на спутнике или с Земли органом управления (на чертеже не показано).
Для наведения на цель путем поворота поднимаемого космического объекта 3 (или его рабочего органа) в вертикальной плоскости, верхние концы расположенных друг напротив друга консолей 32 и 34 прямолинейно-направляющих механизмов из взаимно параллельных пар с опорными элементами места расположения центра масс 4 космического объекта 3, в данной конструкции с опорными полуосями 69 и 70, соединены подвижно, а верхние концы двух других 33 и 35 консолей, расположенных друг напротив друга прямолинейно-направляющих механизмов из этих пар соединены (скреплены) с этими опорными полуосями жестко, с возможностью совместного с консолями 33 и 35 поворота (стрелки 71) космического объекта 3 в вертикальной плоскости (фиг. 6).
Положительный эффект при этом состоит в том, что для наведения на цель не требуется отдельного привода для поворота космического объекта 3 (или его рабочего органа) в вертикальной плоскости. Такой поворот осуществляется за счет перемещения консолей 33 и 35 и подъема (или опускания) космического объекта 3 на соответствующую высоту.
Недостаток такого технического решения - односторонность и ограниченность (не более 90 градусов) обзора, и необходимость для наведения производить регулируемые подъем-опускание, что усложняет работу и снижает точность наведения.
Поэтому в другом варианте с целью повышения качества работы точностью наведения и расширением обзора за счет управления поворотом космического объекта 3 в вертикальной плоскости до 180 градусов, верхние концы консолей 32, 33 - в паре, (26-27) и 34,35 - в паре (28-29) прямолинейно-направляющих механизмов с помощью втулок 72 и 73 соединены подвижно с опорными элементами места нахождения центра масс 4 космического объекта 3, в данной конструкции - с опорными полуосями 69 и 70. А опорные полуоси 69 и 70 механически связаны с валами роторов управляющих электродвигателей 76 и 77, установленных на концевых участках консолей с возможностью сохранения неподвижности их статоров. В частности, валы 74 и 75 роторов электродвигателей 76 и 77 соосно закреплены по концам опорных полуосей 69 и 70. При этом на статорах каждого из электродвигателей для сохранения их неподвижности закреплены пластины 78 и 79 с дуговым пазом 80 в каждой из них, а на концевых участках каждой из вышеупомянутых консолей выполнены пальцы 81 и 82 с возможностью свободного перемещения в этих пазах при поворотах консолей, и опоры на них статоров управляющих электродвигателей 76 и 77.
83 - перемычки в каждом из пазов 80, фиксирующие неподвижное положение статоров электродвигателей.
Таким образом, содержащиеся в изобретении существенно новые технические решения, основанные на использовании конструкции с одной или двумя парами прямолинейно-направляющих механизмов, обеспечивают устойчивое равновесное орбитальное состояние спутника при установке на нем космического объекта, статическую, гравитационную и динамическую устойчивость предложенного устройства, высокие надежность и качество работы и его самого, и устанавливаемого им космического объекта.
Использованные источники информации
/1/ Патент RU 2382452, МПК H01Q 15/00.
/2/ В.В. Белецкий. Движение искусственного спутника относительно центра масс. М., Наука, 1965.
Атомный реактор
Сжижающая установка для летательного аппарата
Ядерный ракетный двигатель
Аэрокосмический самолет с ядерным двигателем и способ осуществления им аэрокосмических полетов
Атомный реактор
Сжижающая установка для летательного аппарата
Ядерный ракетный двигатель
Аэрокосмический самолет с ядерным двигателем и способ осуществления им аэрокосмических полетов

