Результат интеллектуальной деятельности: ЛАЗЕРНАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА, УПРАВЛЯЕМАЯ ПОЛУЧАЕМЫМИ ИЗОБРАЖЕНИЯМИ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает приоритет патентной заявки США № 13/110 352, поданной 18 мая 2011 г., все содержание которой включено сюда посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящий патентный документ описывает систему и способ управления лазером при офтальмологической операции. Более подробно настоящий патентный документ описывает лазерную систему, управляемую получаемыми изображениями, для управления импульсной мощностью офтальмологического лазера, среди прочего, во время капсулотомии и операций на катаракте.
УРОВЕНЬ ТЕХНИКИ
Лазерные системы стали существенно важными для офтальмологической хирургии. Они с высокой точностью давно используются в операциях на роговице и поэтому достигли значительных успехов. В последнее время были рассмотрены заявки на их применения в других офтальмологических операциях, в том числе операциях на катаракте.
Лазеры могут использоваться для формирования разрезов с высокой точностью. Эти разрезы создаются, фокусируя или направляя быструю последовательность лазерных импульсов для формирования растрового изображения или точечного образа. Точки растрового изображения часто формируют строку или слой, и лазерные импульсы направляются к этим точкам системой сканирования, содержащей отклоняющие устройства, зеркала и линзы, выравнивание которых может меняться очень быстро. В типичных лазерных системах импульсы могут иметь продолжительность или длительность импульса в диапазоне наносекунд, пикосекунд или даже фемтосекунд. Частота повторения импульсов может быть в диапазоне от единиц кГц до сотен кГц.
Мощность или энергия лазерных импульсов могут быть выбраны так, чтобы превысить так называемый порог фоторазрушения. Лазерные импульсы с мощностью выше этого порога могут разрушать глазную ткань в целевых точках, вызывая образование пузырьков. Линии или слои этих пузырьков могут ослаблять механическую связь между участками ткани на противоположных сторонах пузырьков. Часто ослабление оказывается существенным, позволяя эффективно разрезать ткань. Поэтому последующая ручная процедура может состоять в легко выполняемом полном отделении участков ткани.
Одной из офтальмологических операций, которая может получить пользу от использования такой лазерной системы резания с высокой точностью, является хирургия катаракты. Типичная хирургия катаракты содержит этап капсулотомии и этап лизиса или фрагментации хрусталика. Во время лизиса энергия прикладывается к ядру хрусталика, чтобы размягчить его. Во время фрагментации хрусталика или факофрагментации ядро хрусталика может быть разрезано на несколько частей, сканируя лазером поверхность резания, чтобы позволить затем удалять ядро участок за участком. Капсулотомия содержит формирование кругового разреза на переднем участке капсульной сумки хрусталика, чтобы позволить хирургу получить доступ и удалить разрезанные части ядра.
Оптимизация хирургических лазерных систем для этих сложных офтальмологических операций является большой проблемой. Однако оптимизация обещает большие преимущества с точки зрения точности и эффективности хирургических операций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Одна из проблем лазерной хирургии катаракты состоит в том, что процедуры капсулотомии и фрагментации хрусталика могут взаимно влиять друг на друга. В современных лазерных системах точность хирургии может быть улучшена посредством получения изображения глазной ткани-мишени перед операцией и направления лазерных импульсов, основываясь на изображении. Если сначала выполняется фрагментация хрусталика, то в качестве побочного продукта операции капсула значительно и неравномерно расширяется за счет большого количества пузырьков, образующихся в капсуле. Поэтому после фрагментации хрусталика изображение капсулы и хрусталика должен быть получено повторно, чтобы направлять последующий круговой разрез капсулотомии. Однако получение изображений сильно фоторазрушенного и деформированного хрусталика может являться проблемой. Кроме того, повторная процедура получения изображений растрачивает драгоценное хирургическое время, увеличивая дискомфорт для пациента и потенциально подрывая точность всей процедуры.
С другой стороны, если сначала выполняется капсулотомия, она создает значительное количество пузырьков в передней области хрусталика и передней и задней камерах глаза. Количество пузырьков особенно велико, если хрусталик перед операцией находится в наклонном положении, как объясняется ниже. Эти пузырьки могут значительно увеличить рассеивание лазерного импульса для последующей фрагментации хрусталика, поскольку последующие импульсы направляются внутрь хрусталика и, таким образом, распространяют через богатую пузырьками переднюю область. Повышенное рассеивание может также потенциально подрывать точность операции на катаракте.
Таким образом, обе последовательности выполнения фрагментации хрусталика и капсулотомии обладают недостатками, поскольку первый этап может ухудшать точность и управление на последующем этапе. Поэтому лазерные системы, которые уменьшают, создают решение или устраняют один или более из этих недостатков, могут оказаться полезными.
Варианты осуществления настоящего изобретения могут предоставить предпочтительные функциональные возможности с точки зрения этих проблем. В частности, вариант осуществления, основанный на лазерной системе с получением изображений, может содержать систему лазерного луча, выполненную с возможностью генерации и сканирования импульсным лазерным лучом с регулируемым параметром лазерной мощности точек растрового изображения глаза, и лазерный контроллер с получением изображений, выполненный с возможностью получения изображений слоя глаза, чтобы управлять сканированием импульсным лазерным лучом точек растрового изображения и управлять параметром лазерной мощности для импульсов лазера в соответствии с расстоянием точек растрового изображения от отображаемого слоя.
Реализация лазерной системы на основе получения изображений может содержать лазер, который генерирует и направляет импульсный лазерный луч в глаз, систему получения изображений, отображающую капсулярный слой глаза, и систему управления лазером, управляющую лазером, чтобы направлять луч к точкам внутри полосы слежения отображаемого капсулярного слоя с параметром мощности лазера, превышающим порог фоторазрушения, и к точкам вне полосы слежения отображаемого капсулярного слоя с параметром лазерной мощности ниже порога фоторазрушения, в которой лазерная система на основе получения изображений выполнена с возможностью капсулотомии перед лизисом или операцией фрагментации или факофрагментации хрусталика на катаракте.
Реализация офтальмологической лазерной системы, управляемой изображением, может содержать лазерную установку, выполненную с возможностью генерации лазерного импульса, формирователя луча, выполненного с возможностью изменения параметра импульсной лазерной мощности, лазерный сканер, выполненный с возможностью направления импульса лазера к точкам сканирования в глазу, систему получения изображений, выполненную с возможностью получения изображения области глаза, и генератор структур, связанный с системой получения изображений, формирователем луча и лазерным сканером, выполненный с возможностью формирования координат точек сканирования для лазерного сканера и ассоциирования параметра лазерной мощности с точками сканирования в зависимости от расстояния точек сканирования до целевой структуры.
В некоторых реализациях способ выполнения офтальмологической операции, управляемой получаемыми изображениями, может содержать получение изображений слоя глаза, формирование координат точек растрового изображения, определение по отображаемому слою расстояния от точек растрового изображения до отображаемого слоя и ассоциирование параметров лазерной мощности с точками, основываясь на определенном расстоянии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
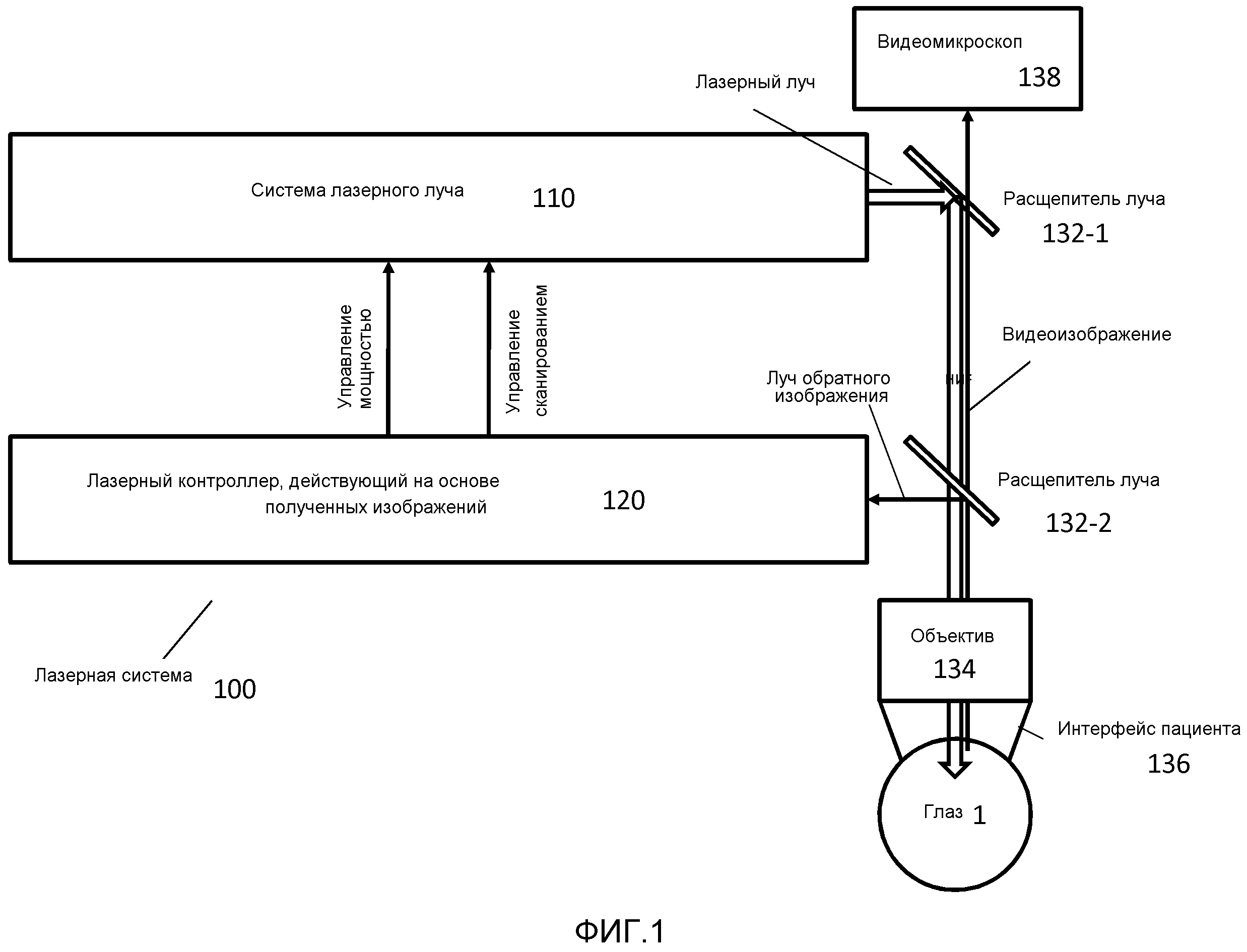
Фиг. 1 - вариант осуществления хирургической лазерной системы с лазерной системой, управляемой получаемыми изображениями.
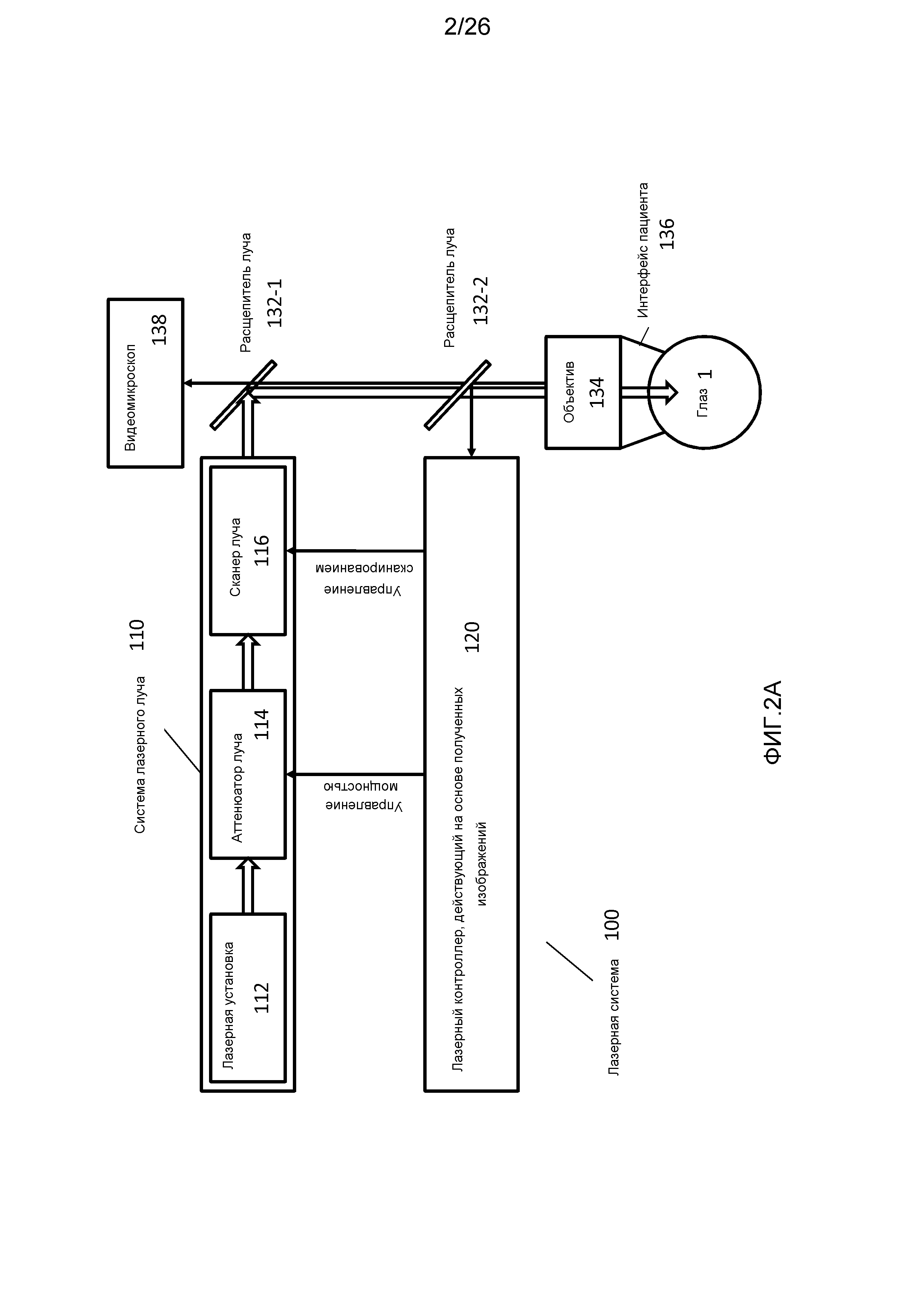
Фиг. 2A-D - варианты осуществления системы лазерного луча.
Фиг. 3A-E - варианты осуществления лазерного контроллера, управляемого получаемыми изображениями.
Фиг. 4A-B - растровые изображения для ненаклоненного и наклоненного хрусталика.
Фиг. 5A-B - традиционные растровые изображения для ненаклоненного и наклоненного хрусталика как функция переменной сканирования.
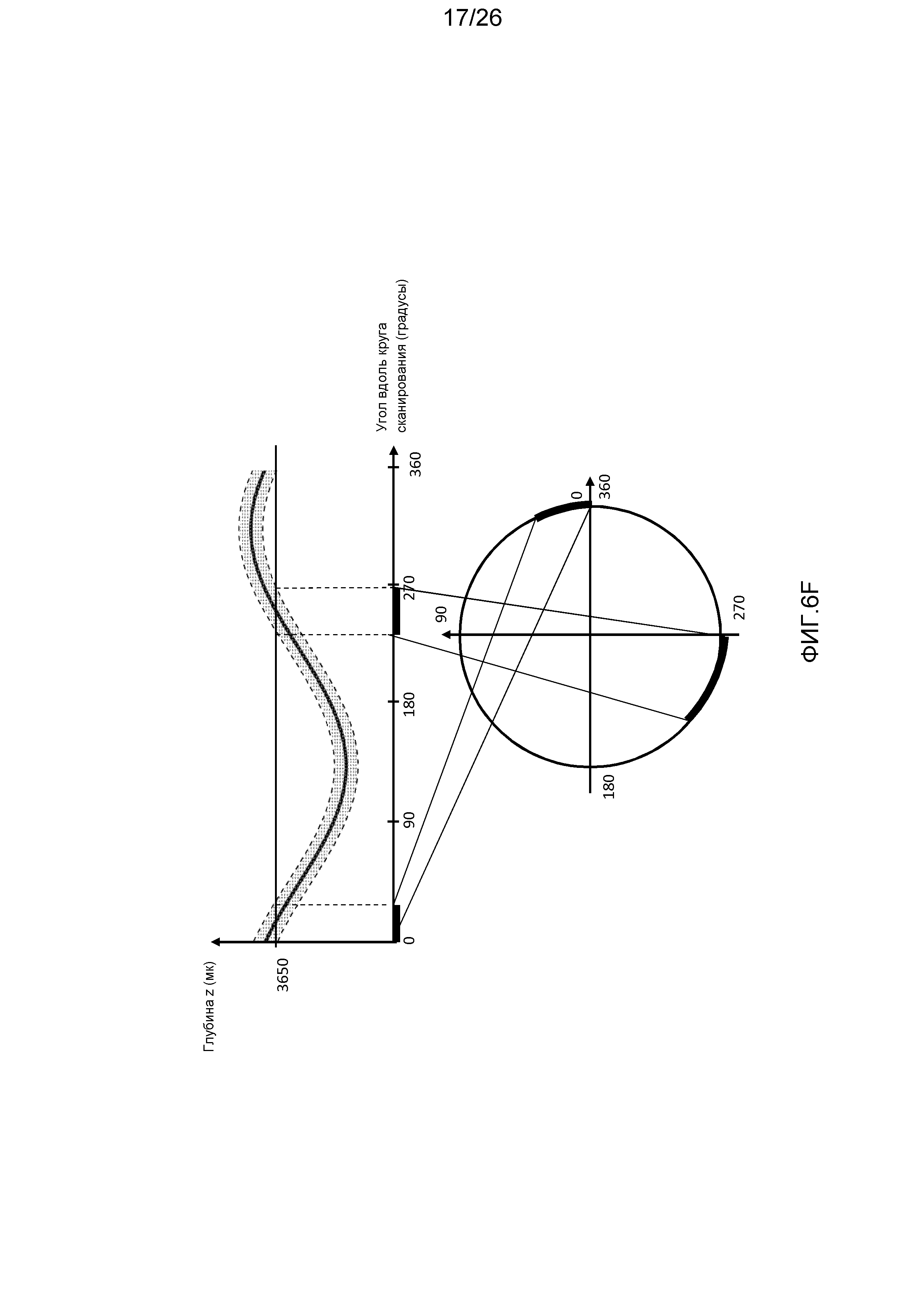
Фиг. 6A-H - растровое изображение вдоль круга сканирования с зависимым от расстояния параметром мощности лазера.
Фиг. 7 - определение глубины по z отображаемого слоя при использовании кривизны для модели.
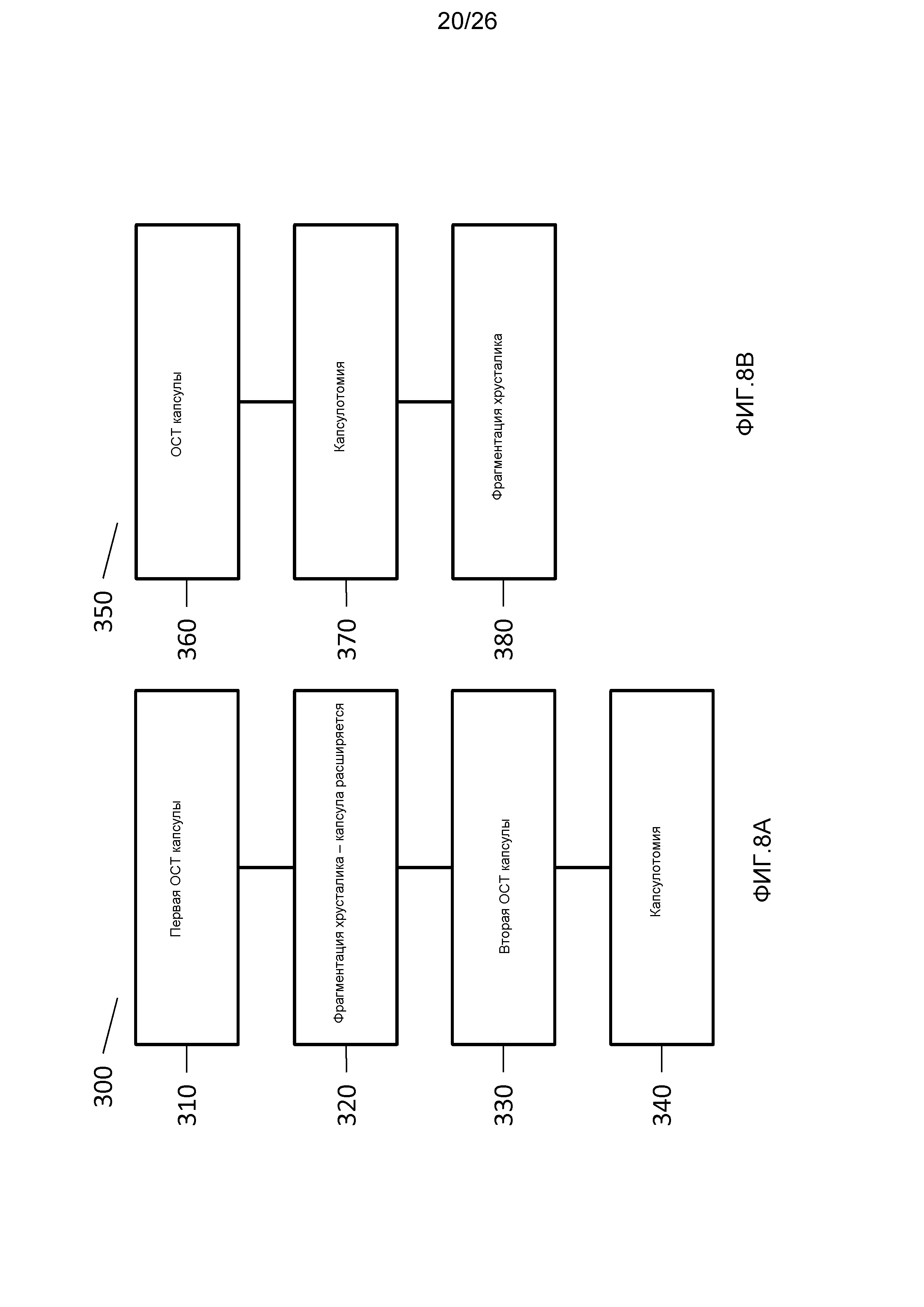
Фиг. 8A-B - способы хирургии катаракты с фрагментацией хрусталика и капсулотомией в различных последовательностях.
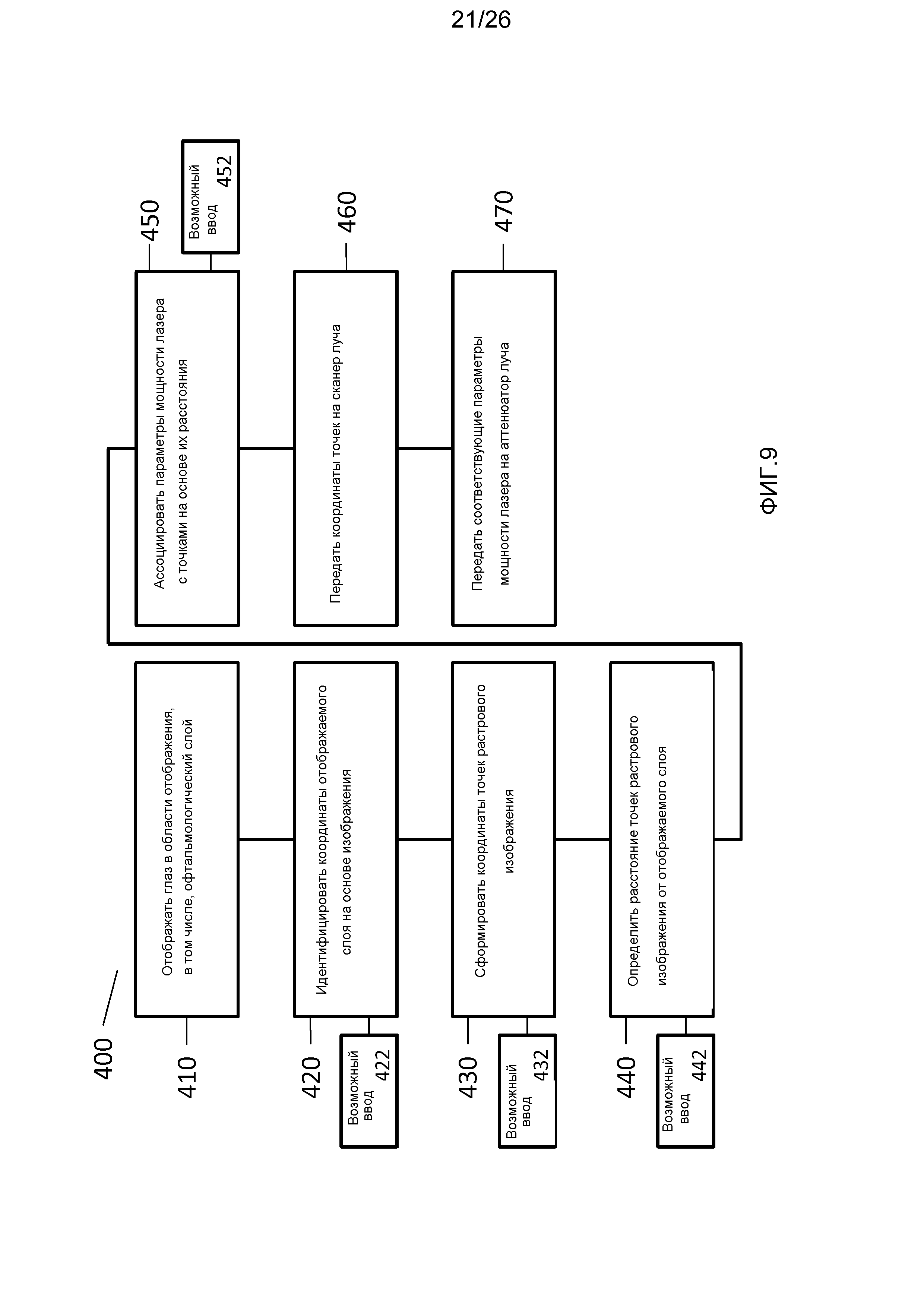
Фиг. 9 - подробное представление способа хирургии катаракты с лазерной системой, управляемой получаемыми изображениями.
Фиг. 10 - мультиэкстремальное лазерное растровое изображение в полосе слежения после фрагментации хрусталика, увеличившей капсулу хрусталика неравномерным образом.
Фиг. 11A-D - растровые изображения для наклонных чоп-разрезов.
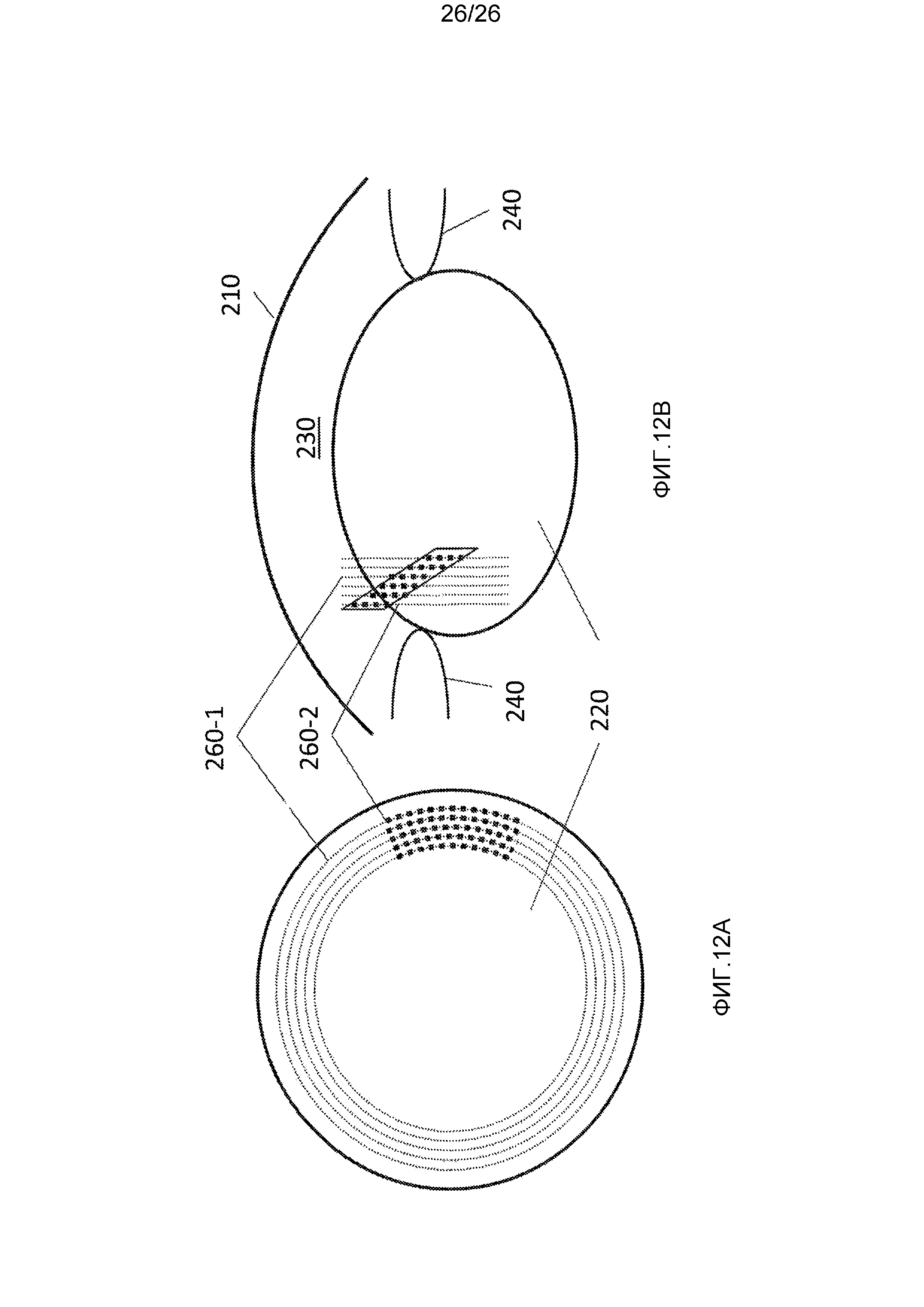
Фиг. 12A-B - растровые изображения для наклонных объемных разрезов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Реализации и варианты осуществления, описанные в настоящем патентном документе, предлагают улучшения для решения описанных выше проблем.
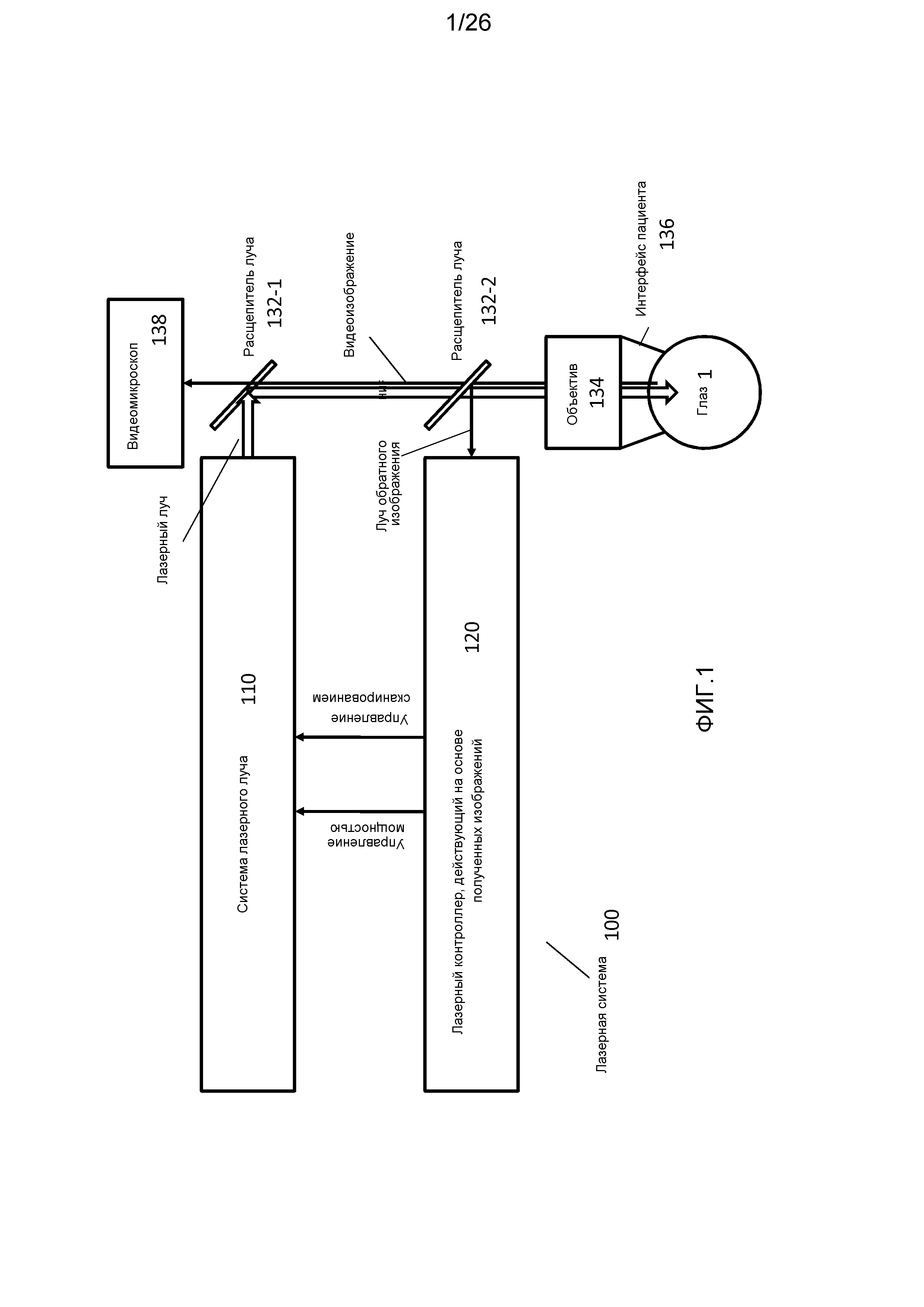
На фиг. 1 показана лазерная система на основе получения изображений, содержащая систему 110 лазерного луча для генерации и сканирования импульсным лазерным лучом с регулируемым параметром лазерной мощности точек растрового изображения в глазу 1, и лазерный контроллер 120 на основе получения изображений, чтобы отображать слой в глазу, управлять сканированием импульсного лазерного луча точек растрового изображения и управлять параметром импульсной лазерной мощности в соответствии с расстоянием между точками растрового изображения и отображаемым слоем. Контроллер 120 лазера может выполнять эти функции, посылая сигнал управления мощностью и сигнал управления сканированием, например, на систему 110 лазерного луча.
Лазерный луч системы 110 лазерного луча может направляться по основному оптическому пути прохождения к расщепителю 132-1 луча, который может перенаправить луч к объективу 134. Луч может распространить через объектив 134 и через интерфейс 136 пациента, чтобы войти в глаз 1, подвергаемый операции.
Хирургической операции можно помочь, отображая глаз 1 различными способами. Видимый свет для получения изображений может использоваться для создания видеоизображения, которое обрабатывается видеомикроскопом 138. Кроме того, лазерный контроллер 120 на основе получения изображений может посылать луч для получения изображений на глаз и формировать изображение, основываясь на обратном луче изображения. Этот луч для получения изображений может быть связан извне или внутри с основным оптическим путем прохождения посредством светоделителя 132-2.
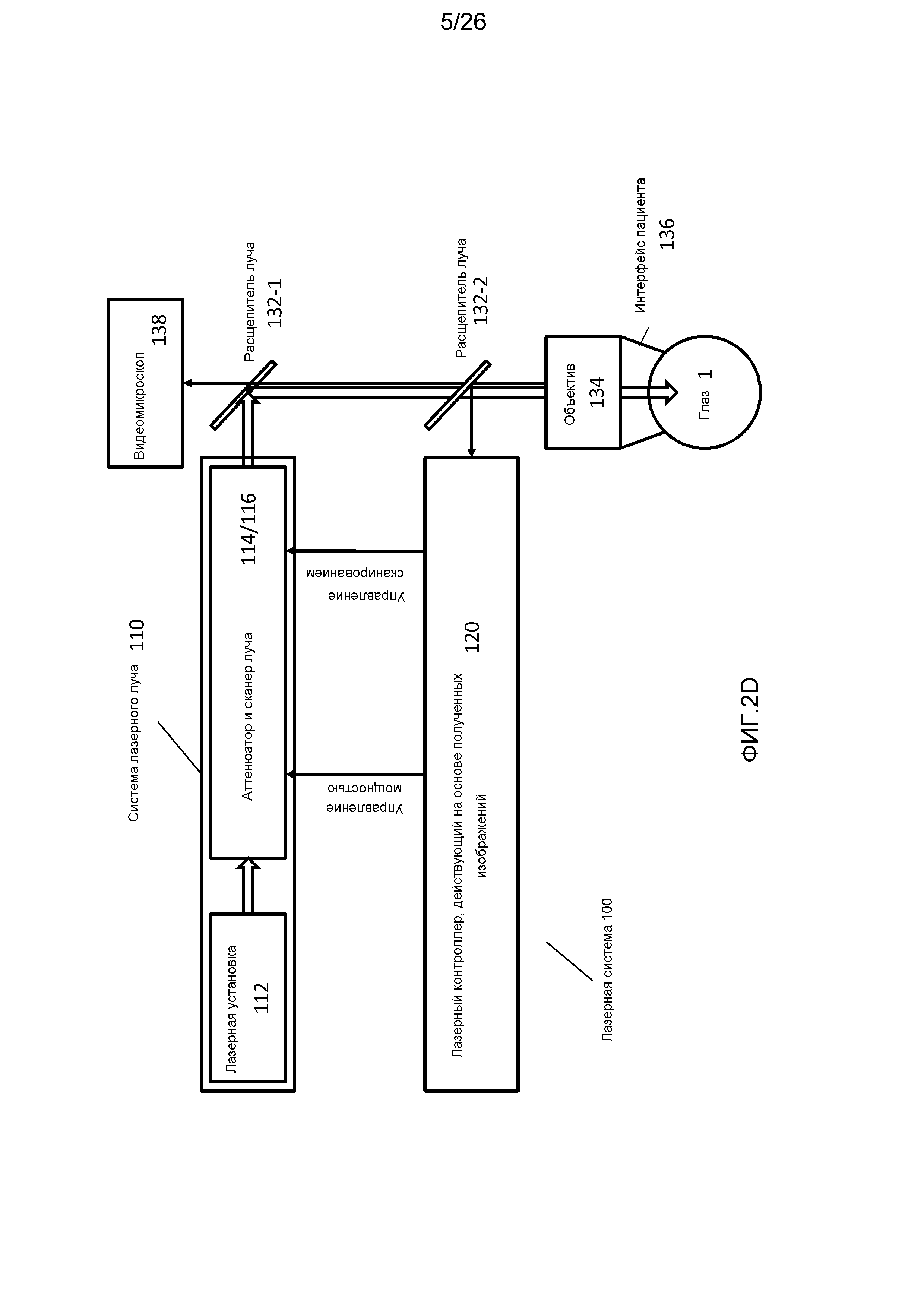
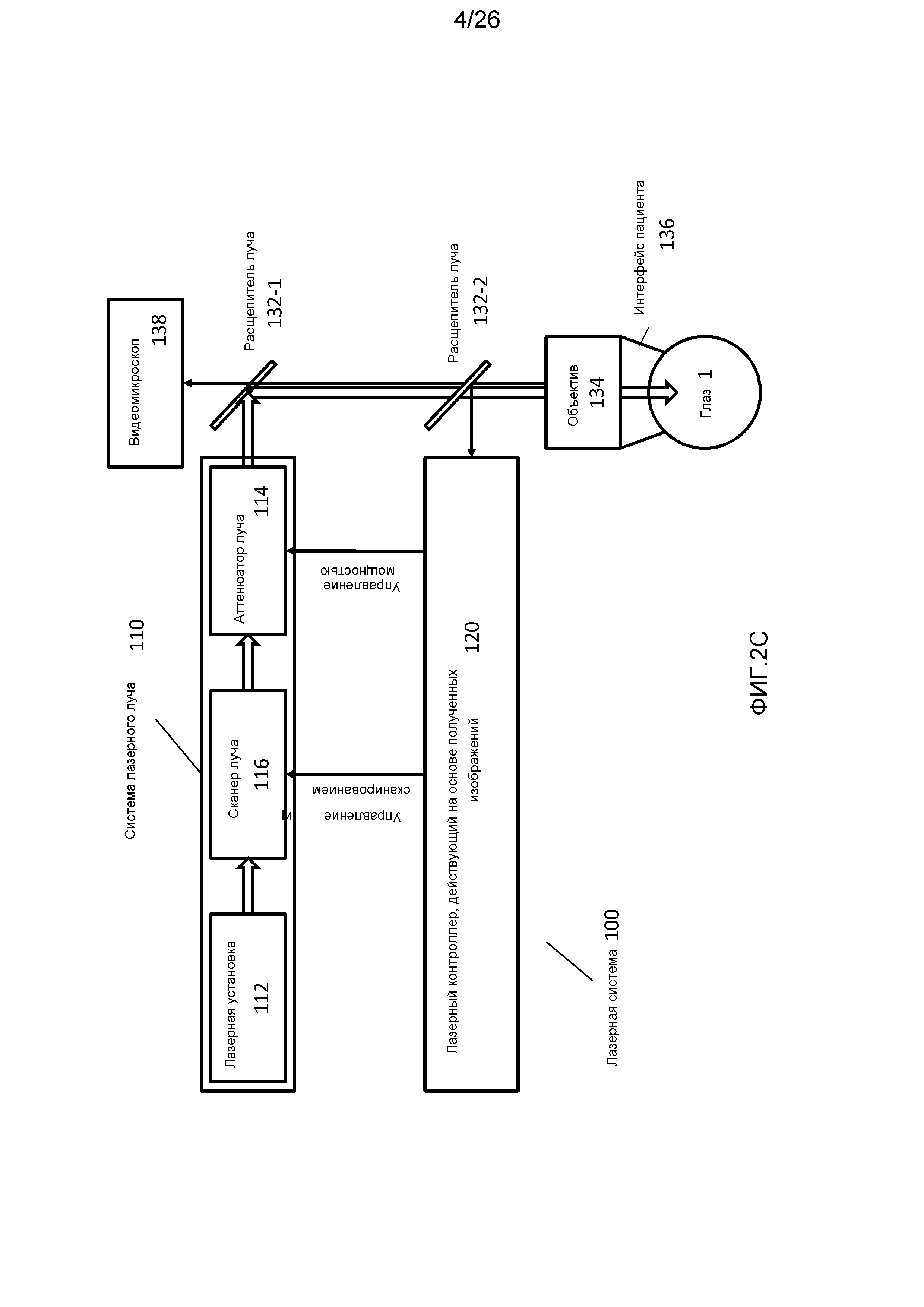
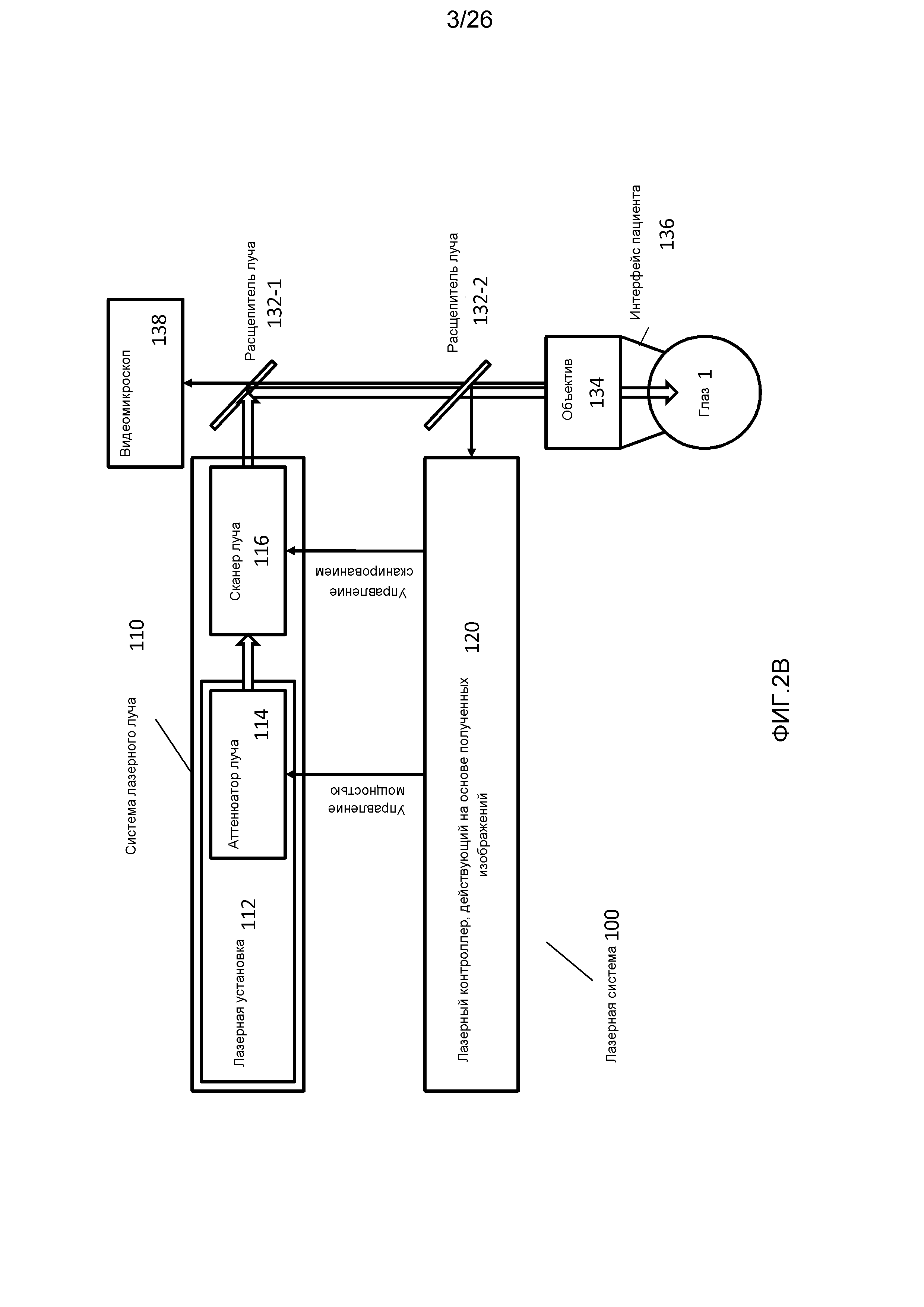
На фиг. 2A-D показаны различные варианты осуществления системы 110 лазерного луча.
На фиг. 2A показано, что варианты осуществления системы 110 лазерного луча могут содержать лазерную установку 112 для генерации импульсного лазерного луча, аттенюатор 114 луча для изменения параметра импульсной лазерной мощности и лазерный сканер 116 для направления импульсного лазерного луча к точкам растрового изображения в глазу. Лазерная установка 112 может генерировать импульсы лазера длительностью наносекунд, пикосекунд или даже фемтосекунд, то есть в диапазоне 10-9 ~ 10-15 секунды. Этот импульс может генерироваться с частотой повторения в широком диапазоне частот: от 0,1 кГц до 1000 кГц, или от 1 кГц до 500 кГц, или в некоторых реализациях в диапазоне от 10 кГц до 100 кГц. Сигнал управления мощностью лазерного контроллера 120 может быть связан с аттенюатором 114 луча, а сигнал управления сканированием лазерного контроллера 120 может быть связан с лазерным сканером 116.
Аттенюатор 114 луча может содержать ячейку Поккельса, сборочный узел поляризатора, механический затвор, электромеханический затвор или энергетическое колесо. Каждый из этих компонент может изменять параметр импульсной лазерной мощности. Параметром мощности лазера, среди прочих, может быть импульсная энергия, импульсная мощность, длительность импульса или частота повторения импульсов лазера. Аттенюатор 114 луча может изменять один или более из этих параметров лазерной мощности. В простой реализации аттенюатор 114 луча может закрывать затвором или блокировать выборочные импульсы лазера. В другом случае сборочный узел поляризатора может уменьшать мощность выборочных импульсов лазера, регулируя относительный угол последующих поляризационных светофильтров.
В варианте осуществления, показанном на фиг. 2A, аттенюатор 114 луча может быть установлен между лазерной установкой 112 и сканером 116 луча на пути прохождения лазерного луча.
На фиг. 2B показан один из вариантов осуществления, в котором аттенюатор 114 луча, по меньшей мере, частично интегрирован в лазерную установку 112. В некоторых случаях аттенюатор луча 114 может быть частью лазерной установки 112. Например, ячейка Поккельса внутри лазерной установки 112 может быть аттенюатором 114 луча.
На фиг. 2C показан один из вариантов осуществления, в котором аттенюатор 114 луча располагается после сканера 116 луча на пути прохождения лазерного луча.
Наконец, на фиг. 2D показан вариант осуществления, в котором, по меньшей мере частично, аттенюатор 114 луча и сканер 116 луча интегрированы.
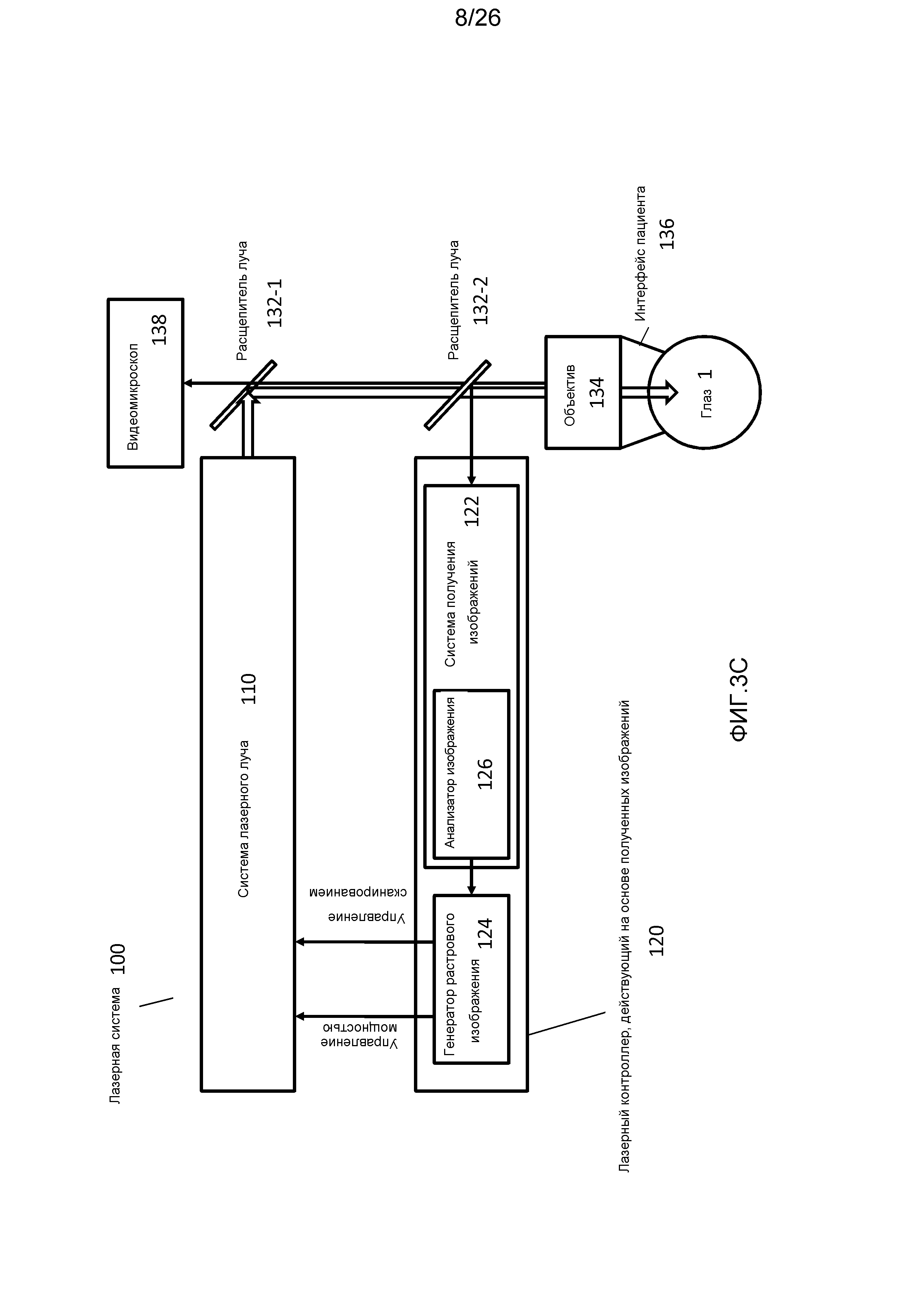
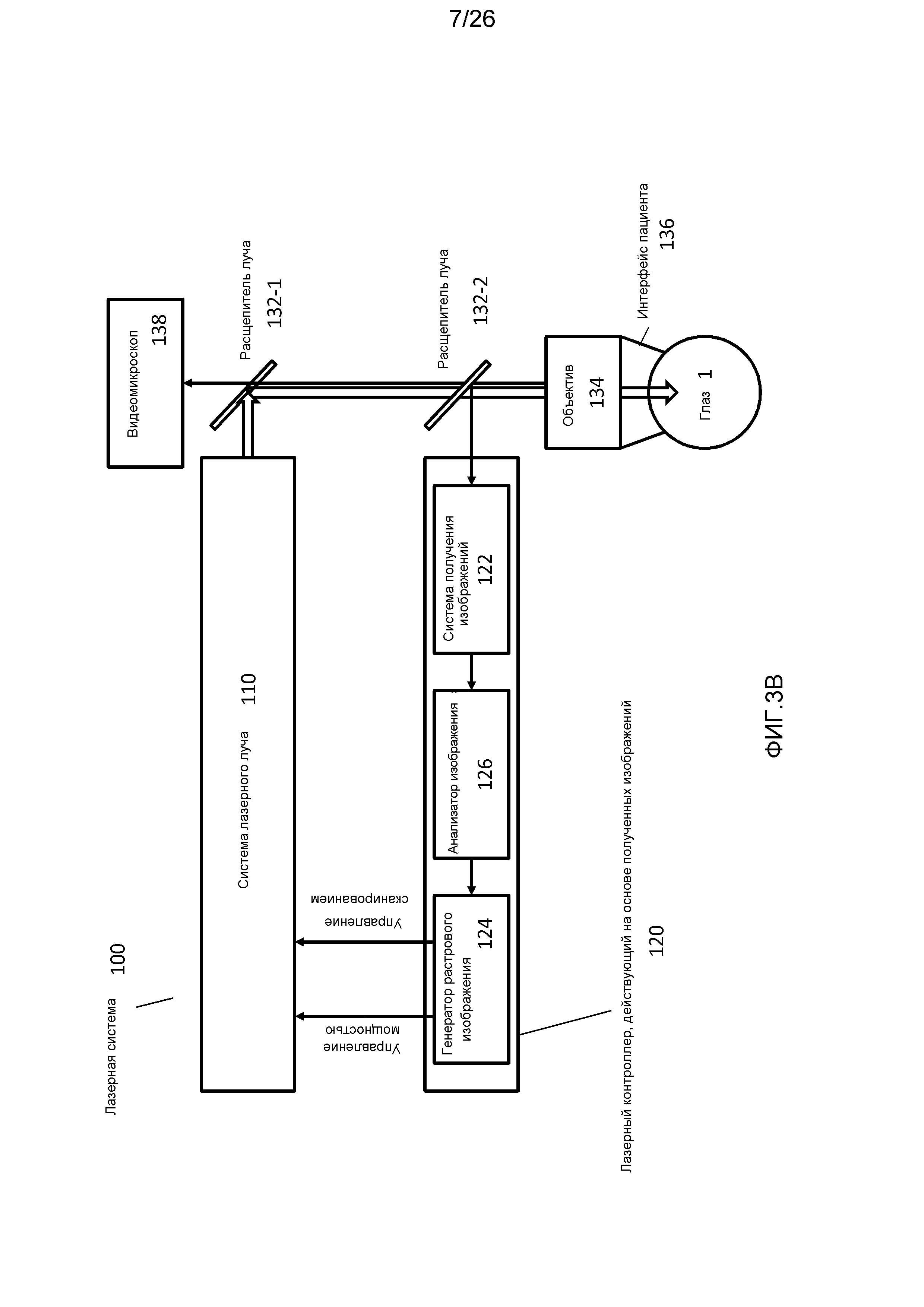
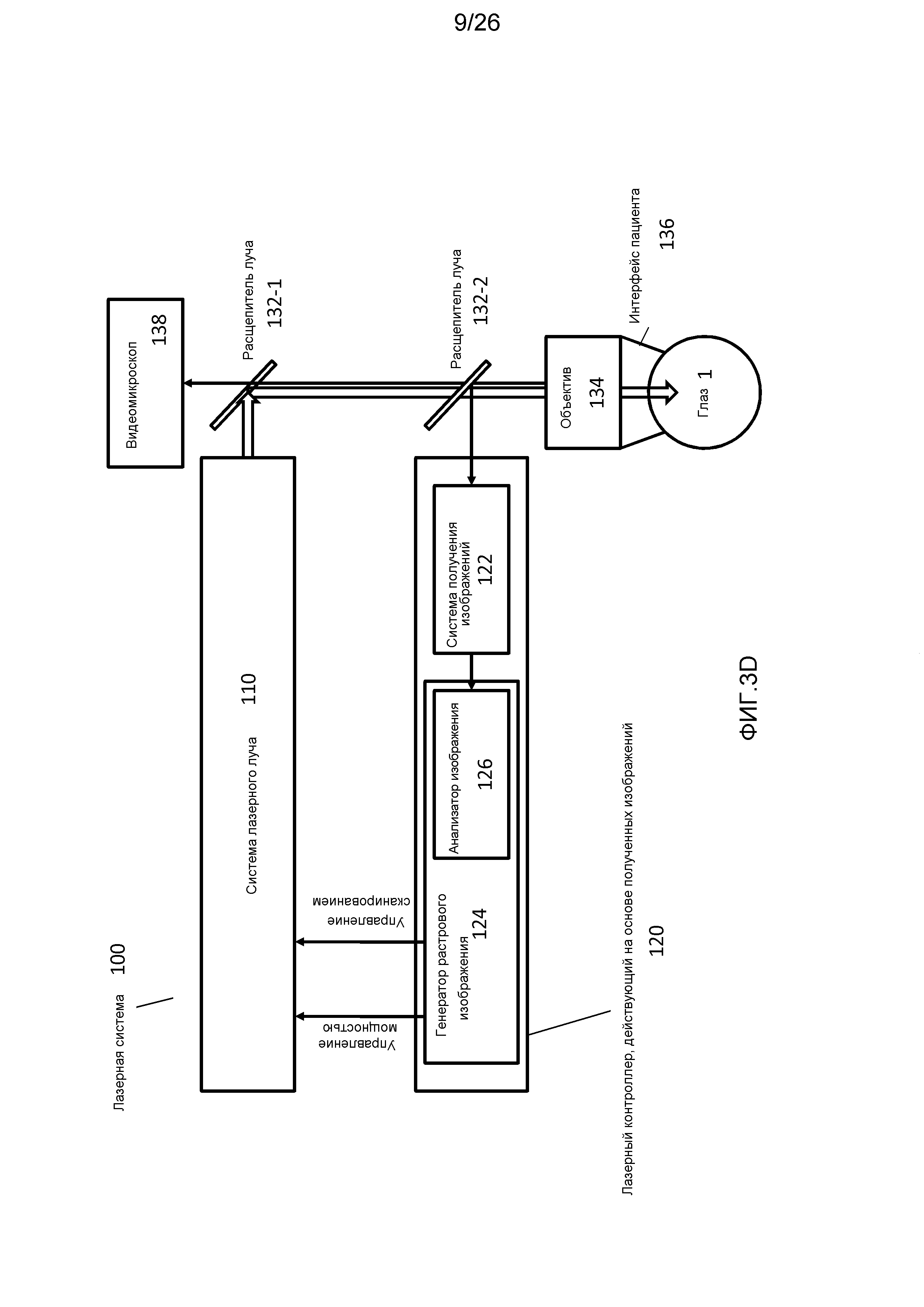
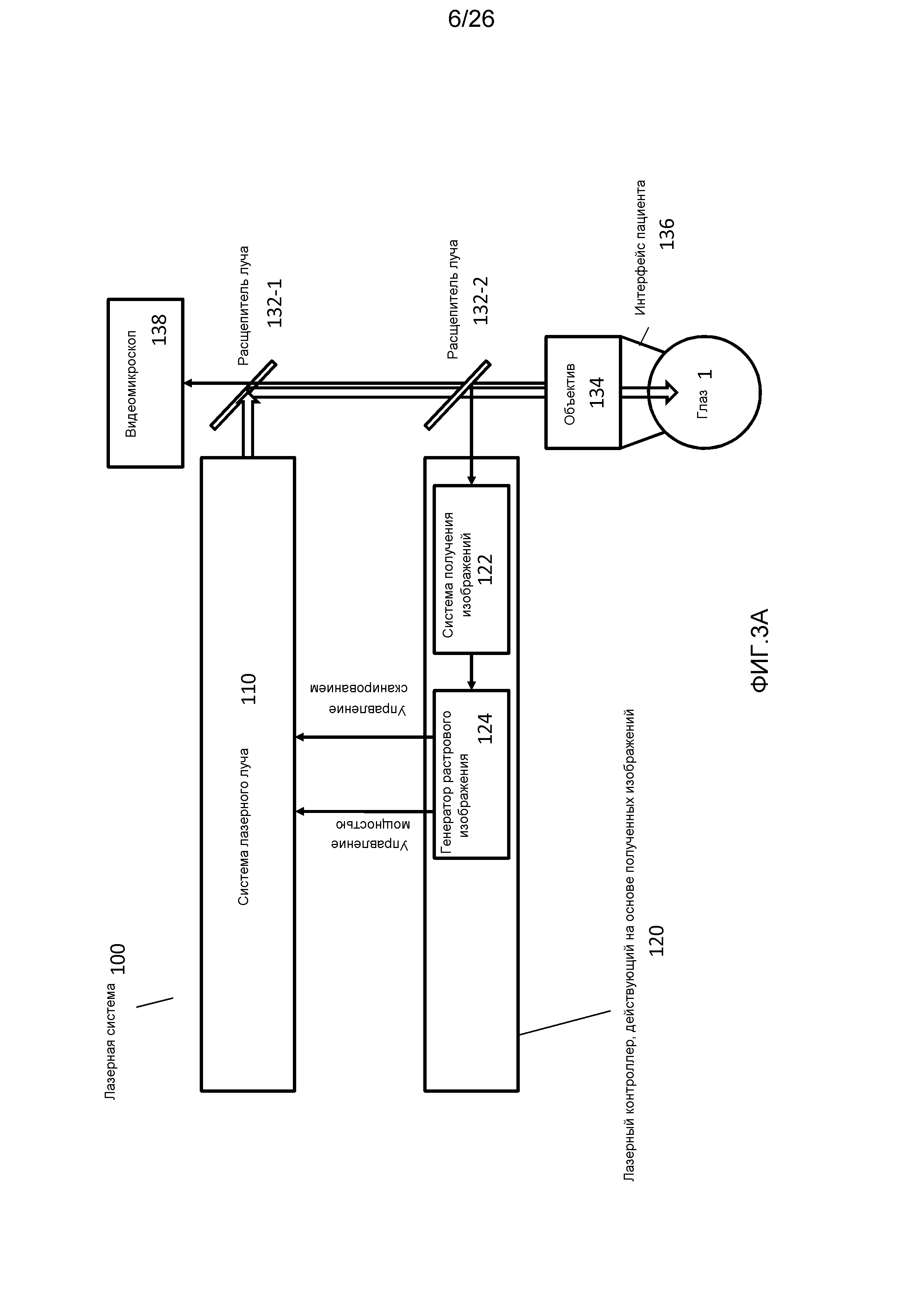
На фиг. 3A-Е показаны различные варианты осуществления лазерного контроллера 120, действующего на основе полученных изображений.
На фиг. 3A показано, что контроллер 120 лазера может содержать систему 122 получения изображений для отображения изображаемого слоя глаза и генератор 124 структур для формирования координат точек растрового изображения, чтобы ассоциировать параметры лазерной мощности с точками в зависимости от расстояния точек от отображаемого слоя и передавать сформированные координаты точек и соответствующие параметры лазерной мощности на систему 110 лазерного луча. В некоторых реализациях система 122 получения изображений может отображать любую офтальмологическую мишень в переднем или заднем сегменте глаза, от роговицы до сетчатки.
Генератор 124 структур может передавать сформированные точки растрового изображения на сканер 116 луча вместе с сигналом управления сканированием. Дополнительно генератор 124 структур может передавать параметры лазерной мощности, соответствующие точкам растрового изображения, на аттенюатор 114 луча вместе с сигналом управления мощностью. Параметром лазерной мощности может быть импульсная энергия, импульсная мощность, длительность импульсов или частота повторения импульсов лазера.
Система 122 получения изображений может содержать систему офтальмологической когерентной томографии (ОСТ), Шаймпфлюг-систему получения изображений, систему получения изображений со сканированием, систему получения одиночных изображений, ультразвуковую систему получения изображений и видеосистему получения изображений. Здесь системы получения изображений со сканированием могут создавать изображение, сканируя луч для получения изображений, тогда как системы получения одиночных изображений могут получать информацию для получения изображений об отображаемой области или объеме в одиночном кадре. Система ОСТ, помимо прочего, может быть системой ОСТ во временной области, системой ОСТ в частотной области или системой ОСТ на основе спектрометра.
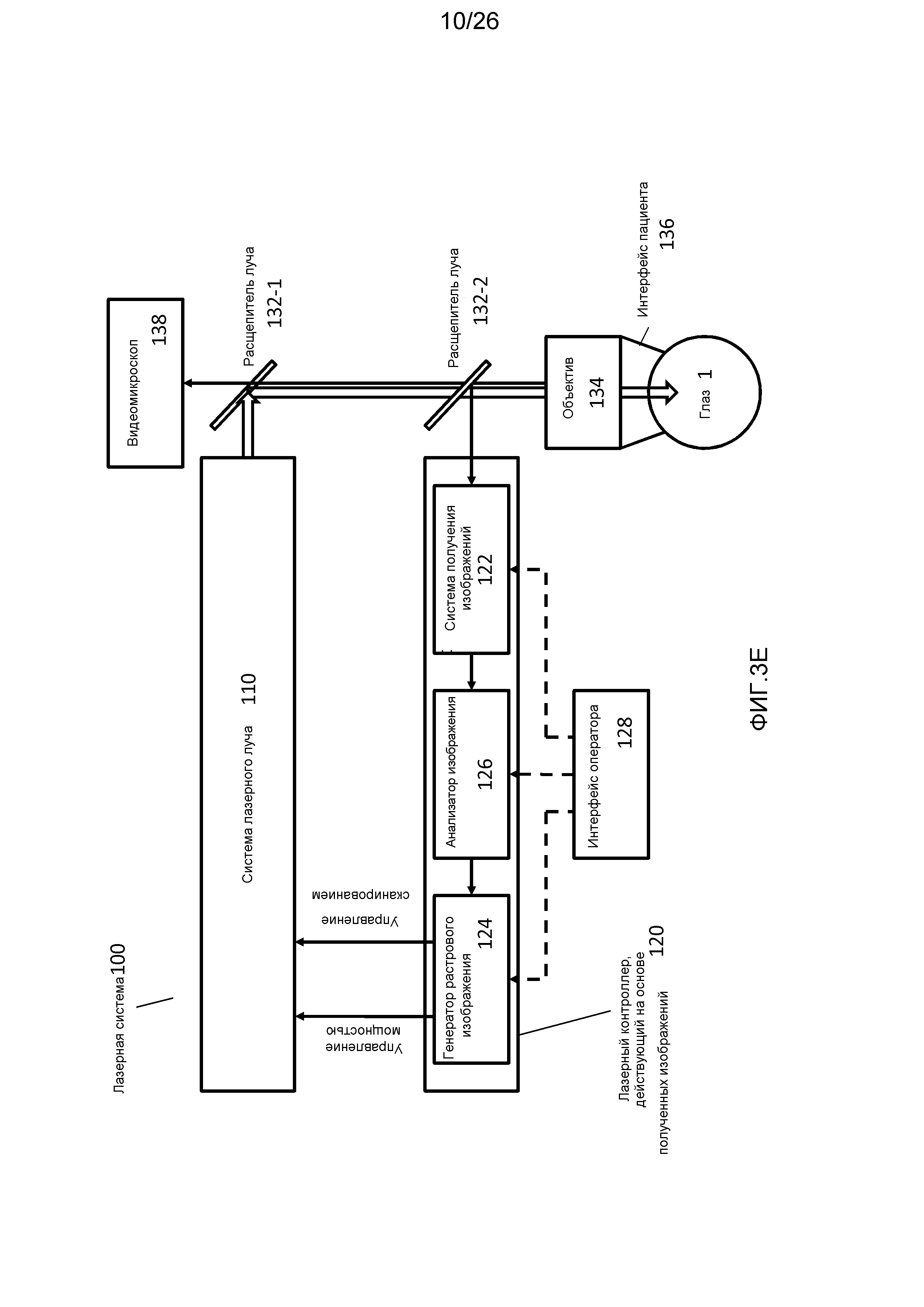
На фиг. 3B показано, что в некоторых реализациях лазерный контроллер 120 может содержать анализатор 126 изображения. Анализатор 126 изображения может принимать изображение отображаемого слоя от системы 122 получения изображений, выполнять анализ отображаемого слоя, как описано ниже, и передавать результат анализа на генератор 124 структур.
На фиг. 3C показано, что в некоторых реализациях анализатор 126 изображения может быть, по меньшей мере частично, интегрирован с системой 122 получения изображений. На фиг. 3D показано, что в некоторых реализациях анализатор 126 изображения может быть, по меньшей мере частично, интегрирован с генератором 124 структур.
На фиг. 3E показано, что в некоторых вариантах осуществления лазерная система 100 может содержать интерфейс 128 оператора, который может быть связан с одной или более системами 122 получения изображений, генератором 124 структур и анализатором 126 изображения.
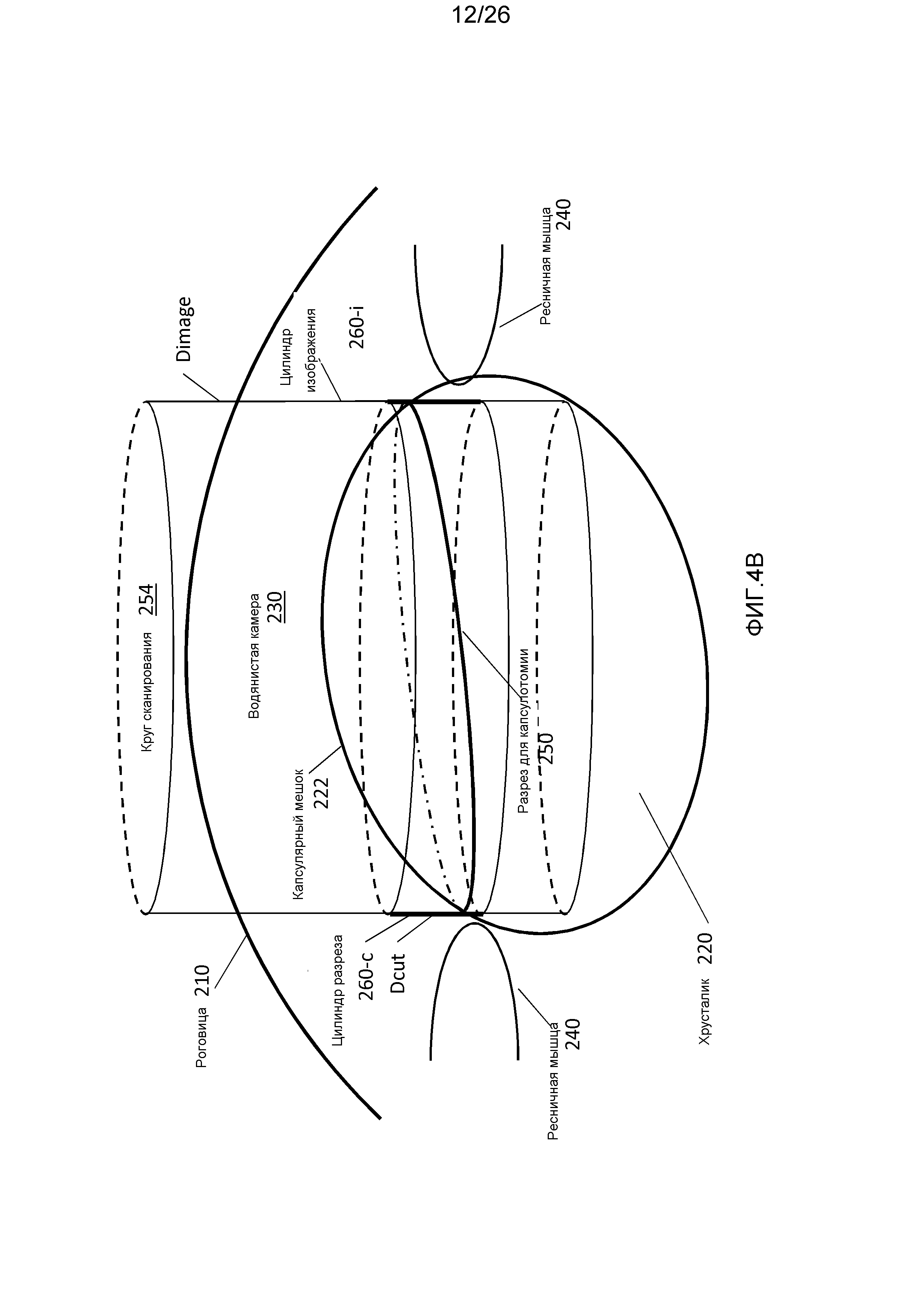
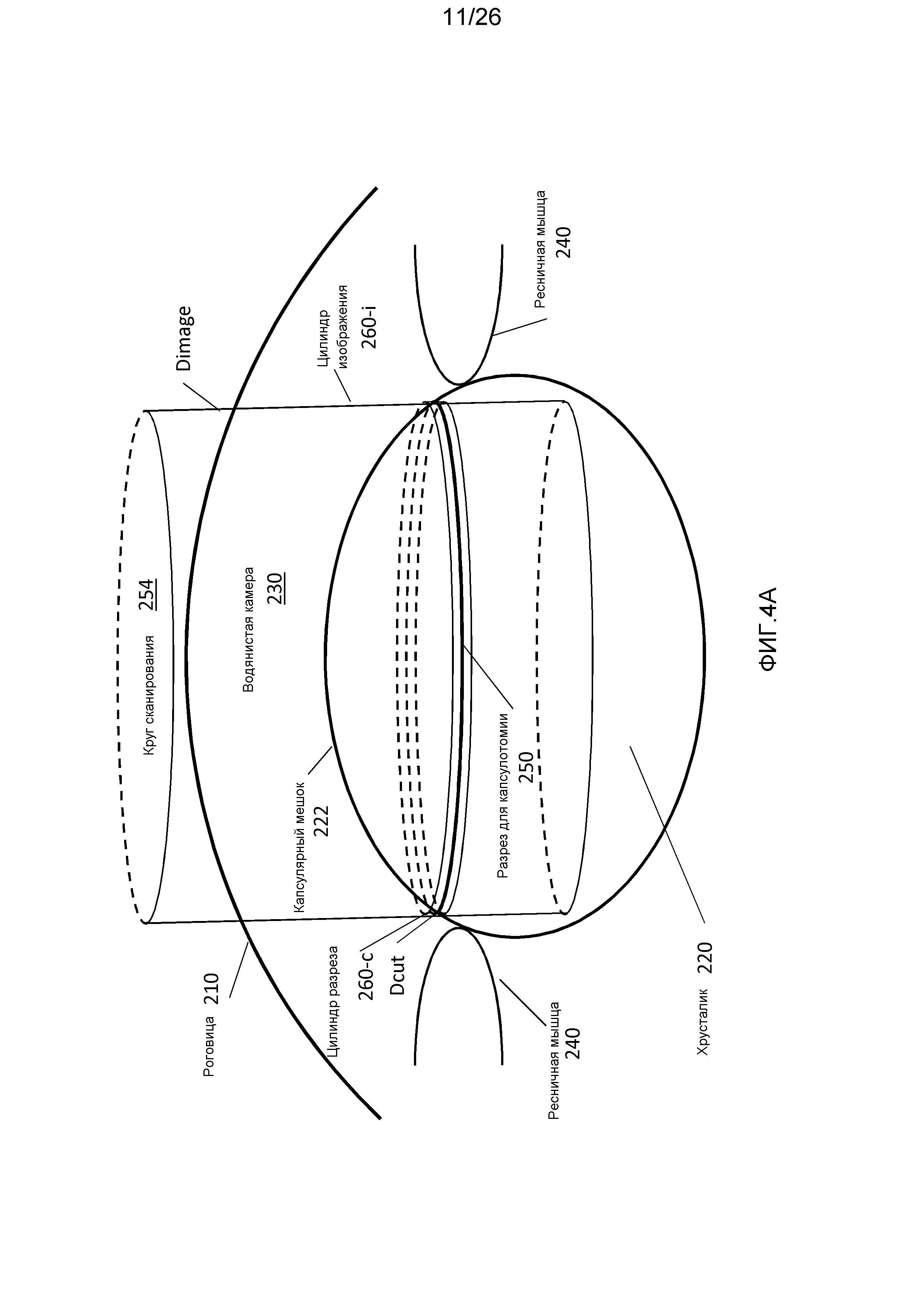
На фиг. 4A-B представлен этап, позволяющий продемонстрировать работу лазерной системы 100. Система 122 получения изображений может отображать отображаемый слой в области отображения, которая может быть основана на петлевой, дуговой, линейной или двумерной структуре, поперечной оси Z системы получения изображений, и проходить на глубину диапазона Dimage вдоль оси Z системы получения изображений. Система 122 получения изображений может поддерживать определение координаты z для отображаемого слоя, соответствующей координате сканирования вдоль сканируемого изображения.
На фиг. 4A показано, что система 122 получения изображений может выполнять получение изображений, относящихся к этапу капсулотомии операции на катаракте. Схематичное поперечное сечение показывает передний сегмент глаза 1. Самым крайним слоем является роговица 210. Хрусталик 220 располагается позади роговицы 210, отделяясь от нее водянистой передней камерой 230 глаза. Хрусталик 220 заключен в тонкую капсулу или капсулярный мешок 222. Хрусталик 220 удерживается на месте реснитчатыми мышцами 240. Эти мышцы 240 по мере необходимости также регулируют форму хрусталика 220, чтобы приводить объекты в фокус.
Как было описано выше, чтобы облегчить удаление фрагментированного ядра хрусталика 220, хирургия катаракты обычно содержит капсулотомию капсулярного мешка 222 с созданием кругового разреза 250. Как первый этап, система 122 получения изображений может создать изображение 252 переднего сегмента глаза, проводя сканирование вдоль круга сканирования 254 и получение изображений глаза в диапазоне Dimage глубин изображения, определяя цилиндр 260-i изображения.
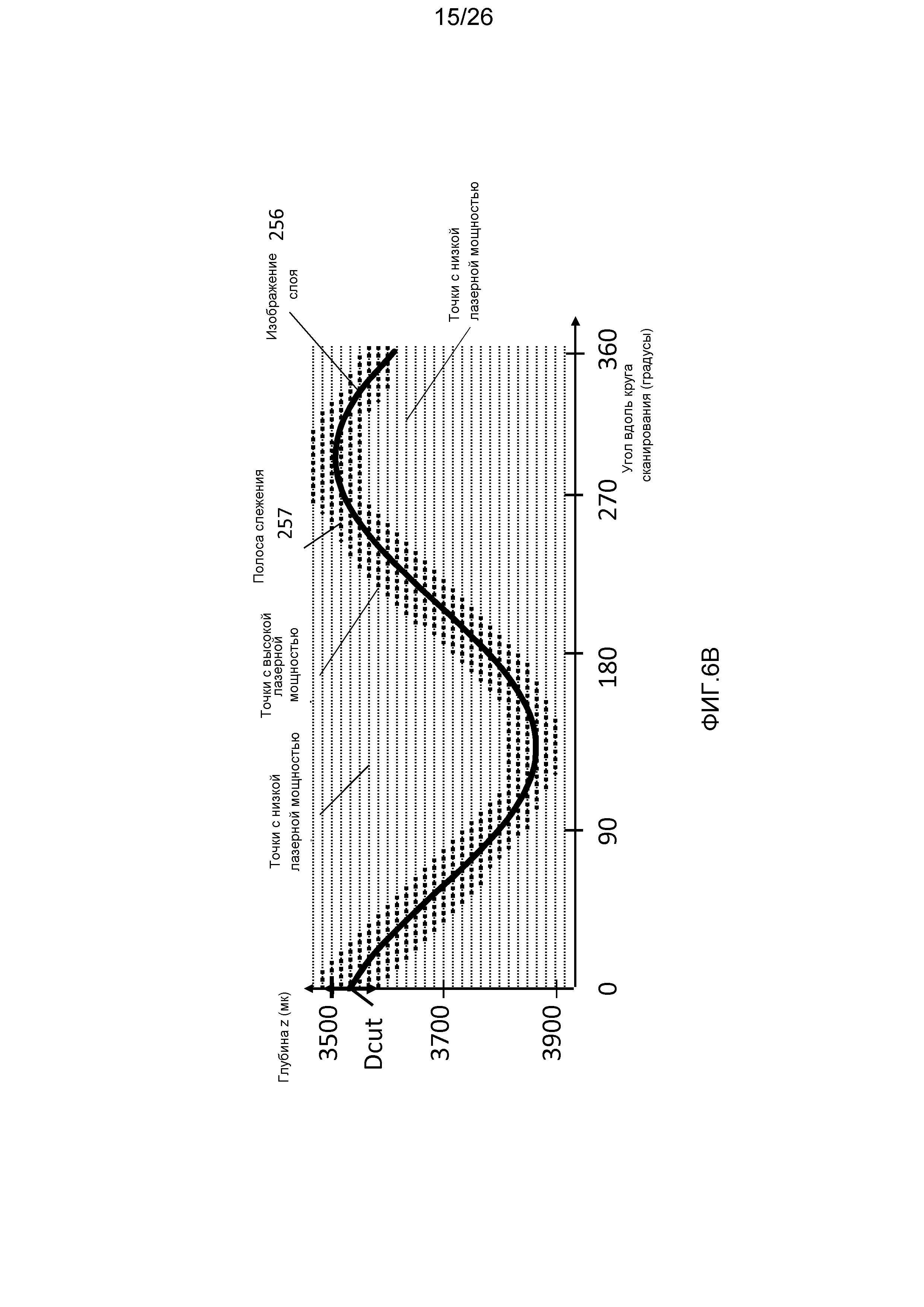
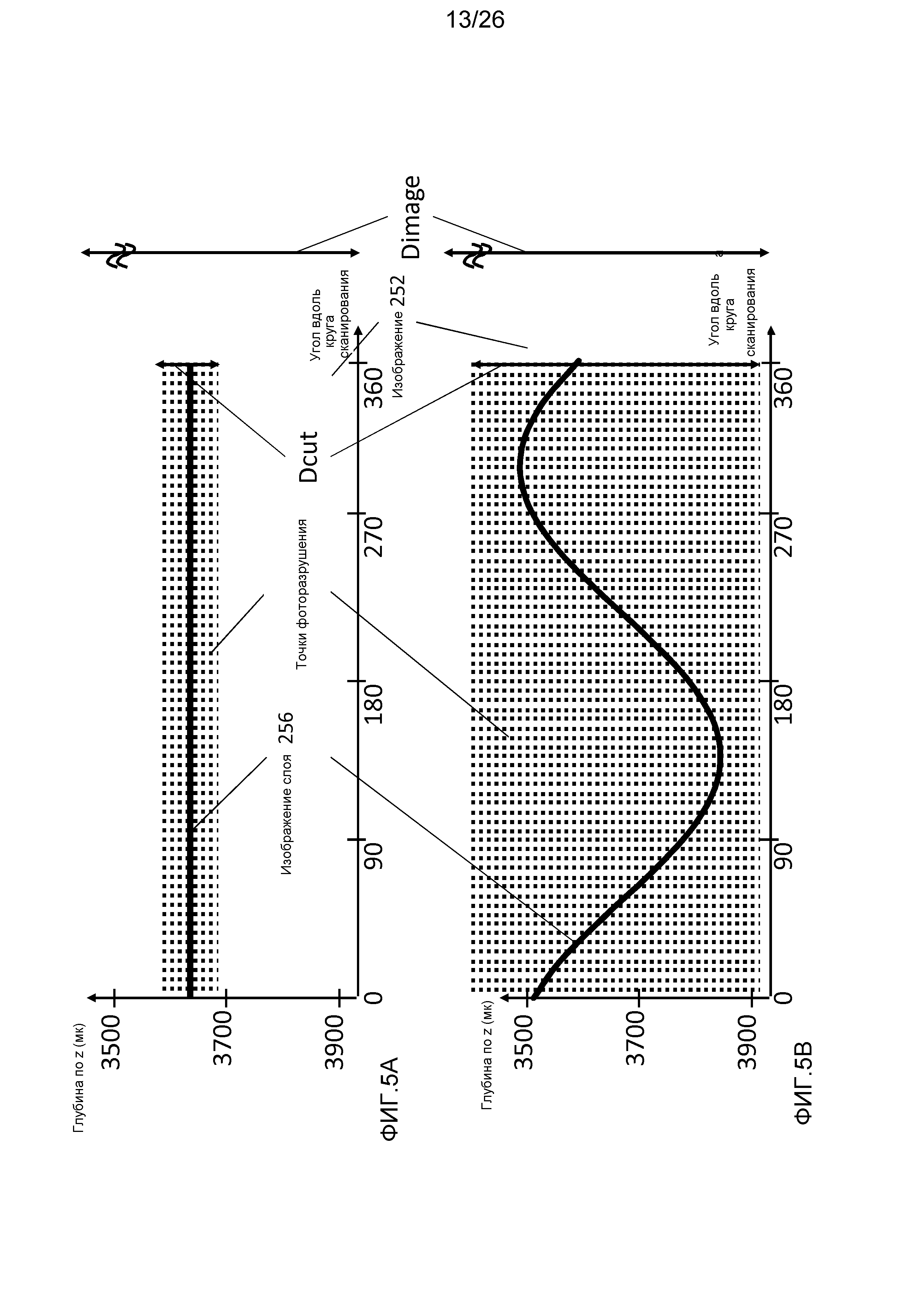
На фиг. 5A показано, что изображение 252 обычно содержит изображение 256 отображаемого переднего капсулярного слоя хрусталика 220, "развернутое" вдоль переменной сканирования, такой как угол вдоль длины окружности круга 254 сканирования. Если ось z хрусталика 220 выровнена с осью z лазерной системы 100, изображение 256 отображаемого слоя является ровной линией, указывающей, по существу, постоянную глубину по z.
В других реализациях изображение 252 может содержать изображение других офтальмологических мишеней, в том числе слоев роговицы, участков склеры и даже слоев сетчатки. Слой нулевой глубины может быть определен множеством способов, используя линзу объектива 134, зеркало опорного луча системы 122 получения изображений, слой интерфейса 136 пациента или слой глазной структуры, такой как роговица 210.
Анализируя изображение 252, хирург может распознать изображение 256 отображаемого слоя. Основываясь на глубине по z отображаемого слоя, хирург может решить, куда направлять режущий лазерный луч, чтобы сформировать капсулотомический разрез 250. Режущий лазерный луч обычно сканирует вдоль одного и того же круга 254 сканирования, чтобы сформировать цилиндр 260-c разреза с диапазоном глубины Dcut, обычно меньшим, чем Dimage. Таким образом, размещение цилиндра 260-c разреза извлекает максимальное преимущество из информации, содержавшейся в изображении 252 и, в частности, в изображении 256 изображаемого слоя. Формируется капсулотомический разрез 250, в котором цилиндр 260-c разреза пересекает капсулу 222 хрусталика. На практике цилиндр 260-c разреза часто формируется как масса пузырьковых кругов, где отдельные круги создаются, направляя импульс лазера вдоль кругового растрового изображения при фиксированной глубине z, чтобы вызвать фоторазрушение, сопровождаемое образованием подобного круга на немного меньшей глубине z.
В некоторых типичных случаях диапазон Dimage глубины изображения может быть равен 5-10 миллиметрам, тогда как диапазон Dcut глубины разреза может быть в диапазоне 50-200 микрон, в некоторых случаях 75-150 микрон, иногда приблизительно 100 микронов.
Заметим, что пузырьки цилиндра 260-c разреза могут рассеивать и отклонять импульс лазера, применяемый на последующих хирургических этапах. Например, в хирургии катаракты капсулотомия может сопровождаться фрагментацией хрусталика или лизисом. Пузырьки цилиндра 260-c разреза могут отрицательно влиять на точность и эффективность этой последующей фрагментации хрусталика, рассеивая импульсы лазера, фрагментирующие хрусталик.
К счастью, когда ось z хрусталика 220 параллельна оси z лазерной системы 100, диапазон Dcut глубины цилиндра 260-c разреза может составлять всего 100 микрон, создавая только ограниченное количество пузырьков. Таким образом, в случае хорошо выровненного хрусталика 220 пузырьки цилиндра 260-c разреза создают лишь ограниченный объем рассеивателя для последующих импульсов лазера, фрагментирующих хрусталик.
На фиг. 4B показано, однако, что в типичном хирургическом случае хрусталик 220 может быть наклонен. Эта ситуация может встречаться по множеству причин. Например, вес объектива 134 после прикрепления к глазу 1 может выталкивать хрусталик 220 в сторону. Или применение всасывания на интерфейсе 136 пациента, чтобы зафиксировать глаз 1 неподвижным, также может привести к наклону хрусталика 220.
На фиг. 5B показано изображение 252 такого наклоненного хрусталика 220, развернутого вдоль угловой переменной сканирования круга 254 сканирования. В отличие от ненаклоненного случая, показанного на фиг. 5A, изображение 256 наклоненного отображаемого слоя может демонстрировать существенные синусоидальные колебания. Амплитуда этих колебаний может доходить до 300-500 микрон. Чтобы гарантировать, что капсулярная сумка 222 разрезана повсеместно с учетом этой синусоиды, цилиндр 260-c разреза может быть сформирован с очень большим диапазоном Dcut глубины, превышающим амплитуду синусоиды. В приведенном выше примере Dcut может составлять 400-600 микрон, чтобы гарантировать, что капсулярный мешок 222 был разрезан с учетом всей синусоиды. Очевидно, что такой подход может создать в 4-6 раз более пузырьков, связанных с фоторазрушением во время капсулотомии, чем процедура для ненаклоненного хрусталика. Пузырьки, возникающие при капсулотомии в таком большом количестве, при последующей фрагментации хрусталика могут в существенной степени рассеивать импульсы лазера, нанося ущерб его точности и эффективности.
На фиг. 6A-H показано, что некоторые реализации лазерной системы 100 могут существенно сократить количество пузырьков, связанных с фоторазрушением, создавая пузырьки только в непосредственной близости от отображаемого слоя.
Как описано выше, этот результат может быть достигнут, например, лазерным контроллером 120 на основе получаемых изображений капсулярного мешка 222, управляя сканированием импульсного лазерного луча точек растрового изображения и управляя параметром импульсной лазерной мощности в соответствии с расстоянием точек растрового изображения от отображаемого слоя.
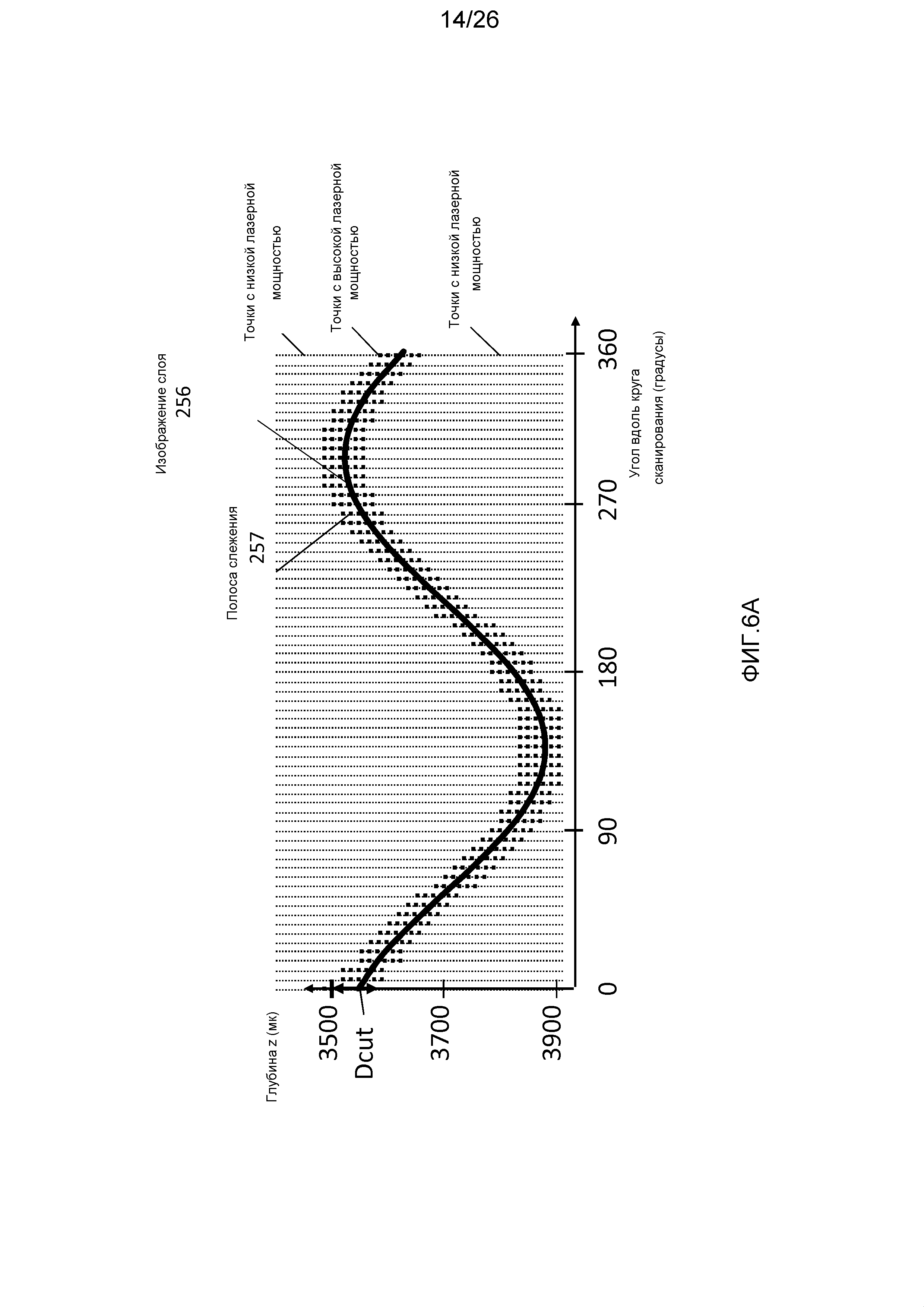
На фиг. 6A-B показано, что по мере того как лазерные импульсы направляются к различным точкам растрового изображения, лазерный контроллер 120 может изменять или регулировать параметр импульсной лазерной мощности луча. В частности, когда лазерный импульс направляется в точку растрового изображения, находящуюся в пределах расстояния Dcut от изображения 256 отображаемого слоя вдоль оси z, лазерный контроллер 120 может отрегулировать свой параметр лазерной мощности на более высокое значение, например, выше порога фоторазрушения. При этом, когда лазерный импульс направляется к точке растрового изображения, находящейся дальше, чем расстояние Dcut от изображения 256 отображаемого слоя, лазерный контроллер 120 может отрегулировать свое значение параметра лазерной мощности на низкое значение, такое, которое ниже порога фоторазрушения.
Описанный выше способ создает пузырьки только вблизи Dcut отображаемого слоя и поэтому существенно снижает количество пузырьков до значения, близкого к числу пузырьков для хорошо выровненного хрусталика. Поэтому рассеивание последующих лазерных импульсов для фрагментирования хрусталика этими пузырьками, возникающими при капсулотомии, существенно уменьшается. Используя упомянутое раннее значение Dcut, составляющее 400-600 микрон для наклоненного хрусталика и 100 микрон для ненаклоненного хрусталика, настоящий способ может уменьшить рассеивание пузырьками, возникающими при фрагментировании хрусталика, в 4-6 раз, что дает значительный выигрыш по точности и управлению.
На фиг. 6A показана реализация, в которой сканирование лазерными импульсами растрового изображения при капсулотомии выполняется вдоль оси Z для фиксированных точек кругового сканирования. На фиг. 6B показана реализация, в которой сканирование выполняется в соответствии с круговым сканированием с фиксированной глубиной по z. Эта реализация может использоваться для создания упомянутых выше многочисленных кругов. При любой из реализаций точки с высокой мощностью лазера располагаются внутри полосы 257 слежения с Dcut, ориентированной вдоль направления z.
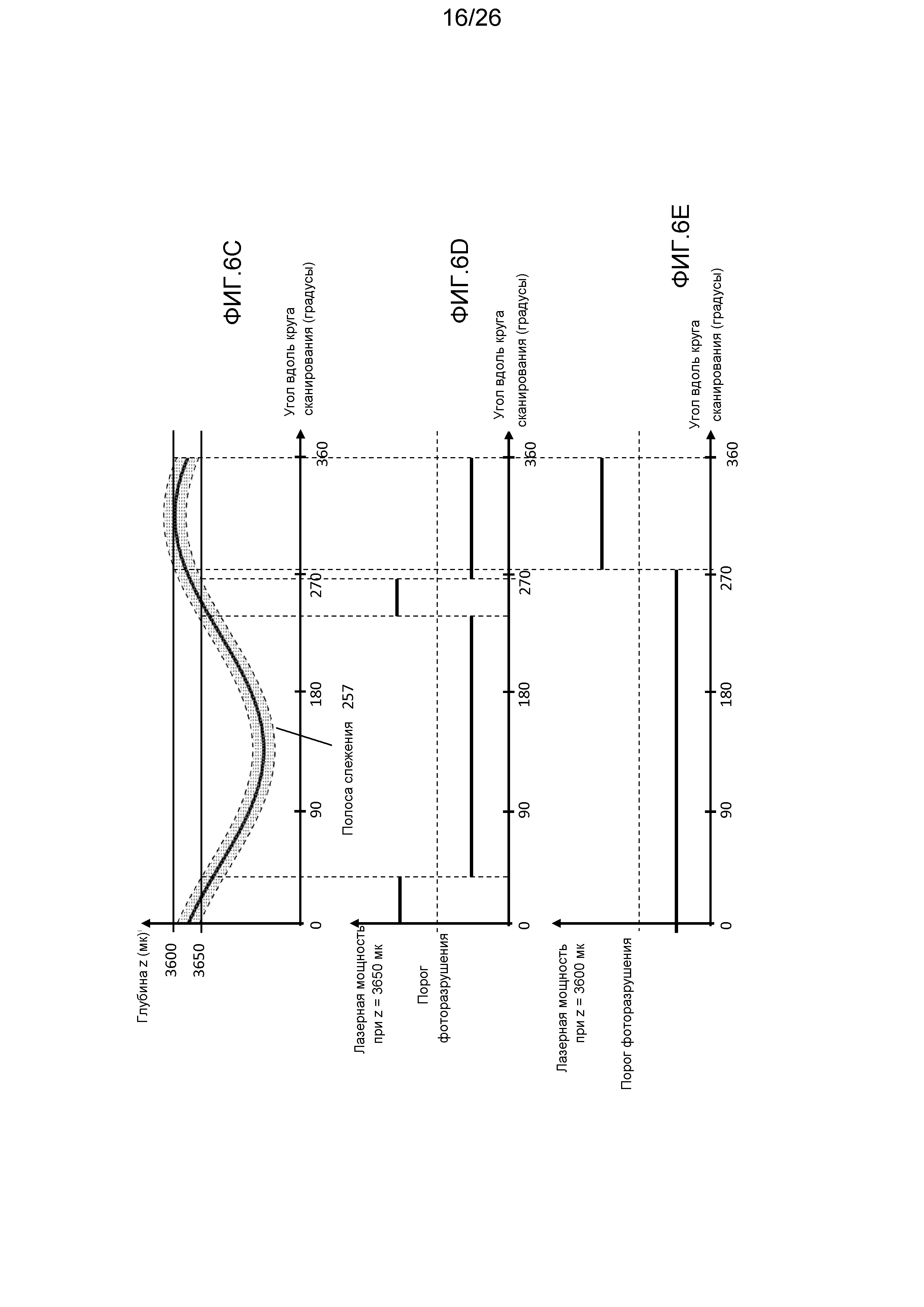
На фиг. 6C-E показана реализация, в которой лазерные импульсы осуществляют сканирование на фиксированную глубину по z в соответствии с круговым сканированием. Полоса 257 слежения может быть определена как множество точек растрового изображения, которые находятся в пределах заданного расстояния Dcut от изображения 256 отображаемого слоя.
На фиг. 6D-E показан параметр импульсной лазерной мощности вдоль сканирования по кругу на двух выбранных глубинах по z 3600 микрон и 3650 микрон в развернутом представлении. Лазерный контроллер 120 может управлять импульсной мощностью лазера, которая направляется к точкам внутри полосы 257 слежения и которая при этом должна выше порога фоторазрушения, и импульсной мощностью лазера, которая направляется к точкам вне полосы 257 слежения и которая должна быть ниже порога фоторазрушения. В этом варианте осуществления пузырьки из-за фоторазрушения создаются только в точках внутри полосы 257 слежения, что позволяет выполнять вышеупомянутые функции лазерной системы 100.
На фиг. 6F показана та же самая операция в свернутом представлении. Здесь значение параметра лазерной мощности показывается как функция угловой переменной сканирования (обычно угол), проектируемая на сам круг 254 сканирования. Опять же для тех точек растрового изображения, которые лежат в пределах полосы 257 слежения, лазерная мощность является высокой (указана жирной линией), тогда как для тех точек, которые лежат вне полосы 257 слежения, лазерная мощность является низкой.
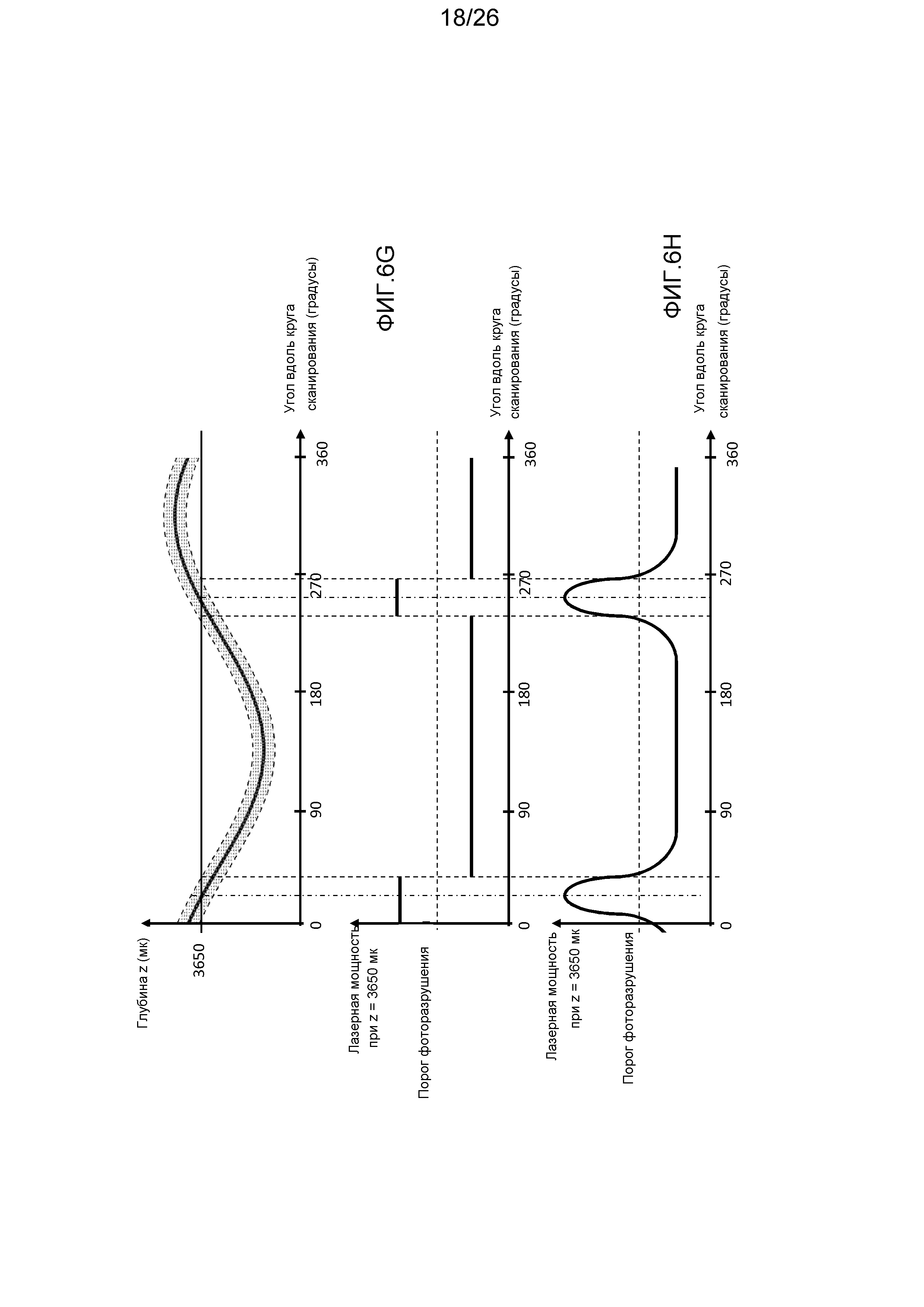
На фиг. 6G-H показана сопутствующая реализация, где контроллер 120 лазерной мощности управляет параметром лазерной мощности как функцией расстояния точек от отображаемого слоя, в которой лазерная мощность является функцией, спадающей в зависимости от расстояния. На фиг. 6G показана реализация, в которой эта функция является, по существу, двузначной ступенчатой функцией. На фиг. 6Н показана реализация, в которой эта функция является непрерывной функцией, ее значение уменьшается с увеличением расстояния от отображаемого слоя. В некоторых реализациях управлять лазерной мощностью может быть легче непрерывным способом, как показано на фиг. 6Н.
Коротко описанные выше реализации зависят от знания расстояния между точками растрового изображения и отображаемого слоя. При определении этого расстояния существуют три этапа. Во-первых, в изображении 252 идентифицируются данные идентификации отображаемого слоя, чтобы определить изображение 256 отображаемого слоя. Затем для отображаемого слоя определяется координата глубины по z. Наконец, может быть определено расстояние между отображаемым слоем и растровым изображением, например, беря разность координат глубин по z для точек растрового изображения и отображаемого слоя в соответствующих угловых координатах сканирования для одного и того же угла.
На первом этапе необработанное изображение 252 не выделяет или не идентифицирует явно отображаемый слой уровень. Таким образом, установление идентификационных данных отображаемого слоя может потребовать анализа изображения 252. Как обсуждалось выше, этот анализ изображения может быть выполнен системой 122 получения изображений, генератором 124 структур или анализатором 126 изображения, возможно поддерживаемыми вводом от оператора системы через интерфейс 128 оператора.
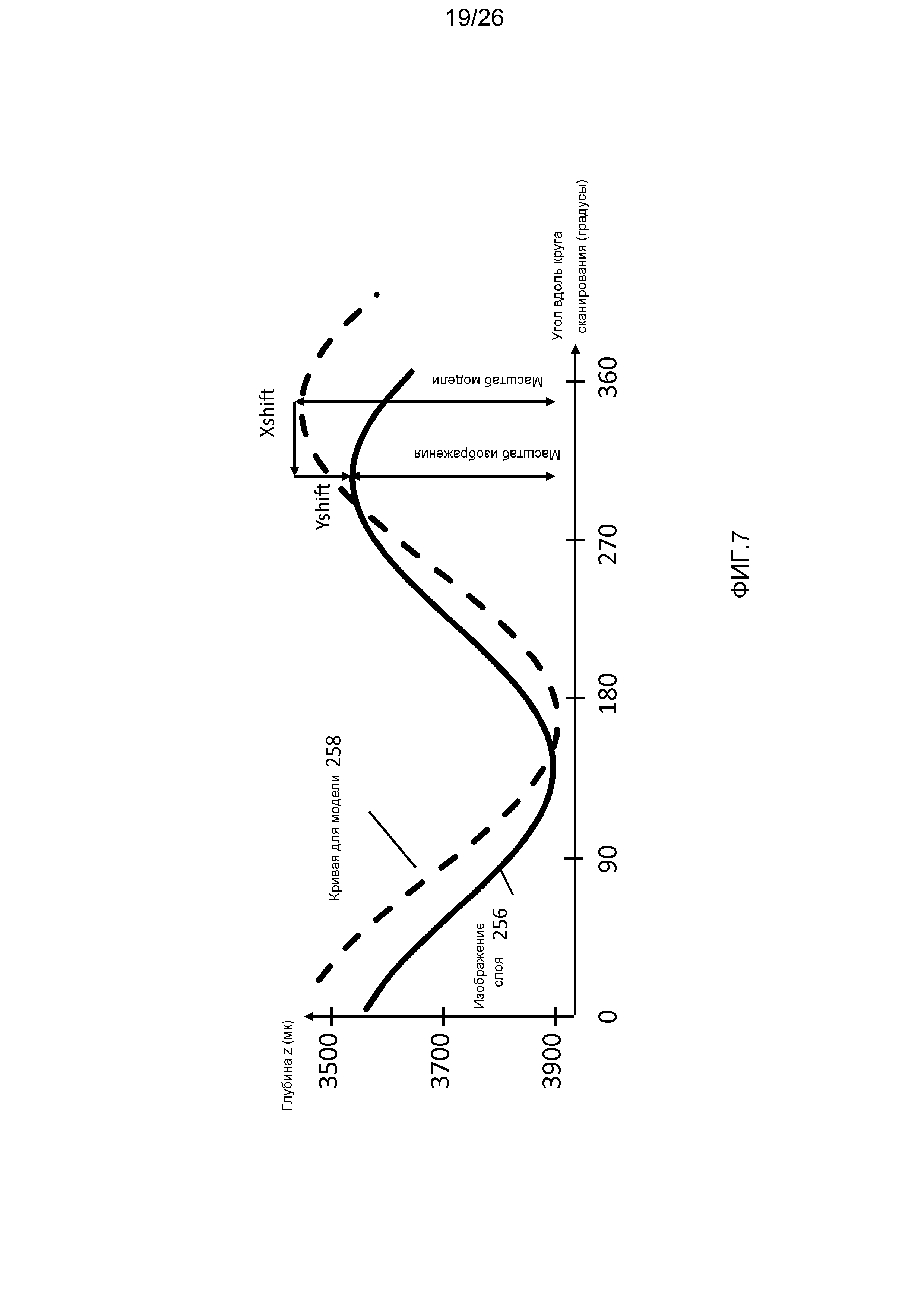
На фиг. 7 показано, что система 122 получения изображений 122 может различными путями поддерживать идентификацию отображаемого слоя и определение его координат по глубине z. В некоторых реализациях лазерная система 100 может содержать интерфейс 128 оператора и система 122 получения изображений может поддерживать идентификацию отображаемого слоя, используя ввод от оператора через интерфейс 128 оператора.
Например, на графическом интерфейсе пользователя или GUI интерфейс 128 оператора может подсказать оператору подогнать кривую 258 для модели к точкам в изображении 252, представляющим отображаемый слой. Поскольку в случае наклоненного хрусталика эллипсоидной формы изображение 256 отображаемого слоя обычно является синусоидальной кривой, интерфейс 128 оператора может отобразить на GUI обобщенную синусоидальную кривую 258 и подсказать оператору подогнать эту кривую 258 для модели к точкам слоя в изображении 252. Когда оператор подогнал кривую 258 для модели к точкам слоя в изображении 252, кривая 258 для модели может служить изображением 256 отображаемого слоя.
Оператор может решить эту задачу посредством различных подходов: смещая кривую 258 для модели на Xshift вдоль направления X (то есть регулируя угол в соответствии с круговым сканированием) и смещая кривую 258 для модели на Yshift вдоль направления Y (то есть, корректируя координату глубины по z). В других реализациях оператору может быть подсказано регулировать масштаб кривой 258 для модели под масштаб синусоидально расположенных точек слоя в изображении 252, то есть повторно масштабировать глубину по z кривой 258 для модели, чтобы подогнать глубину по z для точек слоя. Для достижения аналогичных функциональных возможностей могут быть реализованы много других подходящих способов.
Интерфейс 128 оператора может принять ввод от оператора многими различными способами, в том числе через клавиатуру, сенсорный экран, компьютерный канал связи, внешнюю память, карту флэш-памяти, интернет-соединение, устройство распознавания речи или беспроводное соединение.
В других реализациях определение идентификационных данных и глубины по z для отображаемого слоя может выполняться лазерной системой 100 без ввода данных хирургом или оператором. В частности, система 122 получения изображений может быть выполнена с возможностью определения идентификационных данных и затем координаты глубины по z для отображаемого слоя процессором или микрокомпьютером, выполняющим анализ распознавания признаков изображения 252. Например, система 122 получения изображений может определить идентификационные данные и координаты отображаемого слоя, определяя местоположение локальных максимумов градиента интенсивности точки. В других реализациях может использоваться алгоритм распознавания границ. В этих реализациях система 122 получения изображений может идентифицировать множество точек максимального градиента как изображение 256 отображаемого слоя, не обращаясь к подгонке кривой 258 для модели. В некоторых реализациях, конечно, система 122 получения изображений может использовать кривую 258 для модели, чтобы идентифицировать изображение 256 отображаемого слоя.
В упомянутых выше реализациях, когда идентификационные данные отображаемого слоя были определены в изображении 252, координаты глубины по z для отображаемого слоя могут быть определены прямым способом, например, подсчитывая пиксели в изображении 252 или используя ссылку или таблицу поиска.
Для анализа изображения система 122 получения изображений может использовать результат измерения, проведенного перед хирургией, статистические данные, данные видеоизображения, данные изображения офтальмологической когерентной томографии или результаты вычисления на основе модели, полученные во время определения глубины по z.
Когда глубина по z отображаемого слоя была определена, система 122 получения изображений может передать глубину по z и соответствующие координаты сканирования отображаемого слоя на генератор 124 структур, чтобы выполнить последний этап, определение расстояния между отображаемым уровнем и точками растрового изображения, сформированными генератором 124 структур. Этот этап может быть выполнен, например, вычитая координаты глубины по z для точек растрового изображения из координат глубины по z для отображаемого слоя, которые соответствуют одной и той же переменной сканирования, такой как один и тот же угол сканирования.
Наконец, определив расстояние точек растрового изображения от отображаемого слоя, генератор 124 структур может ассоциировать параметр лазерной мощности, превышающей порог фоторазрушения, с теми точками, которые ближе к отображаемому слою, чем заданное расстояние, и ассоциировать параметр лазерной мощности, которая ниже порога фоторазрушения, с теми точками, которые удалены от отображаемого слоя дальше, чем заданное расстояние, как описано со ссылкой на фиг. 6A-H.
В некоторых реализациях система 122 получения изображений получает только изображение 252, но не идентифицирует отображаемый слой или не определяет его координаты глубины по z. В этих вариантах осуществления система 122 получения изображений может просто передавать необработанное изображение 252 на генератор 124 структур, не анализируя это. Генератор 124 структур может принять изображение 252, идентифицировать отображаемый слой и определить координату глубины по z отображаемого слоя, соответствующего координате сканирования вдоль направления сканирования изображения.
Как сказано выше, в некоторых реализациях генератор 124 структур может определить глубину по z отображаемого слоя, выполняя анализ распознавания признаков принятого изображения 252. В других реализациях генератор 124 структур может получить ввод от оператора через интерфейс 128 оператора во время процесса определения глубины по z для отображаемого слоя, как описано ранее.
В этих реализациях, когда координаты глубины по z для отображаемого слоя были определены, генератор 124 структур может определить полосу 257 слежения как множество точек растрового изображения, которые находятся в пределах заданного расстояния от координат отображаемого слоя. Затем генератор 124 структур может ассоциировать параметр лазерной мощности, превышающей порог фоторазрушения, с точками растрового изображения в полосе 257 слежения, и параметр лазерной мощности, которая ниже порога фоторазрушения, с точками растрового изображения вне полосы 257 слежения.
Другие реализации лазерного контроллера 120 могут содержать анализатор 126 изображения, который может определить координату глубины по z для отображаемого слоя, соответствующую координате сканирования вдоль направления сканирования изображения. Как было показано на фиг. 3B-D, изображение 126 анализатора может быть автономным или, по меньшей мере частично, интегрированным с системой 122 получения изображений или генератором 124 структур.
Анализатор 126 изображения может идентифицировать отображаемый слой и определять координату глубины по z для отображаемого слоя, выполняя анализ распознавания признаков изображения 252. В других реализациях анализатор 126 изображения может определить координату глубины по z, используя ввод от оператора через интерфейс 128 оператора.
Работа лазерной системы 100 может быть продемонстрирована на примере операции капсулотомии, где отображаемым слоем является капсула 222 хрусталика между хрусталиком 220 и водянистой передней камерой 230. В этом случае растровое изображение соответствует цилиндру 260-c разреза, пересекающему капсулу 222 хрусталика на разрезе 250 капсулотомии. Генератор 124 структур может ассоциировать параметр фоторазрушающей лазерной мощности с точками внутри полосы 257 слежения, связанной с пересечением 250 цилиндра 260-c разреза и капсулы 222 хрусталика, и параметром лазерной мощности, которая ниже мощности фоторазрушения, с точками вне полосы 257 слежения.
На фиг. 8A показана первая операции 300 на катаракте, выполняемая без использования преимуществ лазерной системы 100. Операция 300 на катаракте может применяться, когда при капсулотомии создается чрезмерное количество пузырьков, как показано на фиг. 4B-5B. Чтобы предотвратить чрезмерное рассеивание этими пузырьками, созданными при капсулотомии, фрагментация хрусталика выполняется до капсулотомии. Подробнее, операция 300 на катаракте может содержать первое получение на этапе 310 изображений капсулы 222, выполняемое посредством процедуры ОСТ, сопровождаемой фрагментацией хрусталика на этапе 320. Во время фрагментации хрусталика на этапе 320 капсула 222 расширяется из-за большого количества пузырьков, создающихся в хрусталике 220. Фрагменты хрусталика 220 удаляются через отверстие, прорезанное в капсуле 222 посредством капсулотомии 340. Однако, поскольку во время фрагментации хрусталика на этапе 320 капсула 222 расширилась, результаты первого получения изображений на этапе 310 больше не могут быть надежными. Поэтому капсулотомии на этапе 340 должно предшествовать второе получение изображений на этапе 330. Второе получение изображений на этапе 330 может отбирать драгоценное хирургическое время и увеличивать дискомфорт пациента. Оба эти фактора могут подвергать опасности эффективность операции 300 на катаракте.
На фиг. 8B показана операция 350 на катаракте с вариантом осуществления лазерной системы 100. Так как лазерная система 100 во время капсулотомии способна создавать только ограниченное количество пузырьков, капсулотомия может быть выполнена до фрагментации хрусталика. Это изменение последовательности может в значительной степени сократить время операции и, таким образом, существенно повысить точность операции на катаракте.
Более подробно, операция 350 на катаракте может содержать получение на этапе 360 изображений капсулы 222, например, посредством ОСТ-системы получения изображений, с последующей капсулотомией на этапе 370 и завершаться фрагментацией хрусталика на этапе 380. Так как капсулотомия на этапе 370 не деформирует хрусталик 220, то в отличие от операции 300 нет необходимости во втором получении изображений.
На фиг. 9 более подробно показан способ 400 операции на катаракте, управляемый получаемыми изображениями. Способ 400 может содержать получение на этапе 410 изображений отображаемого глазного слоя в отображаемой области глаза, с последующей идентификацией на этапе 420 координат отображаемого слоя на основе изображения. Эти задачи могут быть выполнены, например, системой 122 получения изображений лазерного контроллера 120, действующего на основе получаемых изображений. Идентификация на этапе 420 может содержать выполнение анализа распознавания признаков. В других случаях она может содержать прием ввода от оператора через интерфейс 128 оператора. Эти задачи могут выполняться системой 122 получения изображений, генератором 124 структур или анализатором 126 изображения.
Затем способ 400 может содержать формирование на этапе 430 координат точек растрового изображения и определение на этапе 440 расстояния от точек растрового изображения до отображаемого слоя. Эти этапы могут выполняться, например, генератором 124 структур.
Способ 400 может дополнительно содержать соединение на этапе 450 параметров лазерной мощности с созданными точками, основываясь на определенном для них расстоянии. Задачи этапов 420-450 могут содержать принимаемые возможные вводы 422-452 от оператора лазерной системы 100 через интерфейс 128 оператора.
Способ может также содержать передачу на этапе 460 созданных координат точек растрового изображения на сканер 116 луча и передачу на этапе 470 соответствующих параметров лазерной мощности на аттенюатор 114 луча.
На фиг. 10 показан случай, важный для хирургии, когда капсула 222 хрусталика имеет неровную форму. Эта ситуация может возникнуть при различных обстоятельствах. Например, прикрепление интерфейса 136 пациента может вызвать значительную деформацию переднего сегмента глаза 1. Или глазная травма или предшествующая операция фрагментации хрусталика могут привести в результате к неровной форме хрусталика. При любом из этих обстоятельств лазерная система 100 может быть способна анализировать изображение 256 отображаемого слоя, которое демонстрирует более чем два локальных экстремума. Ясно, что простая синусоидальная кривая 258 для модели недостаточна, чтобы в этом случае идентифицировать отображаемый слой и определить его координату по глубине z. Поэтому варианты осуществления системы 122 получения изображений, генератора 124 структур или анализатора 126 изображения могут быть способны распознавать отображаемый слой и определять его координату по глубине z даже в этом более сложном случае, например, используя сложное программное обеспечение распознавания признаков. Определив и охарактеризовав изображение 256 отображаемого слоя, можно позволить генератору 124 структур определить полосу 257 слежения, чтобы соответственно ассоциировать параметры лазерной мощности с точками растрового изображения.
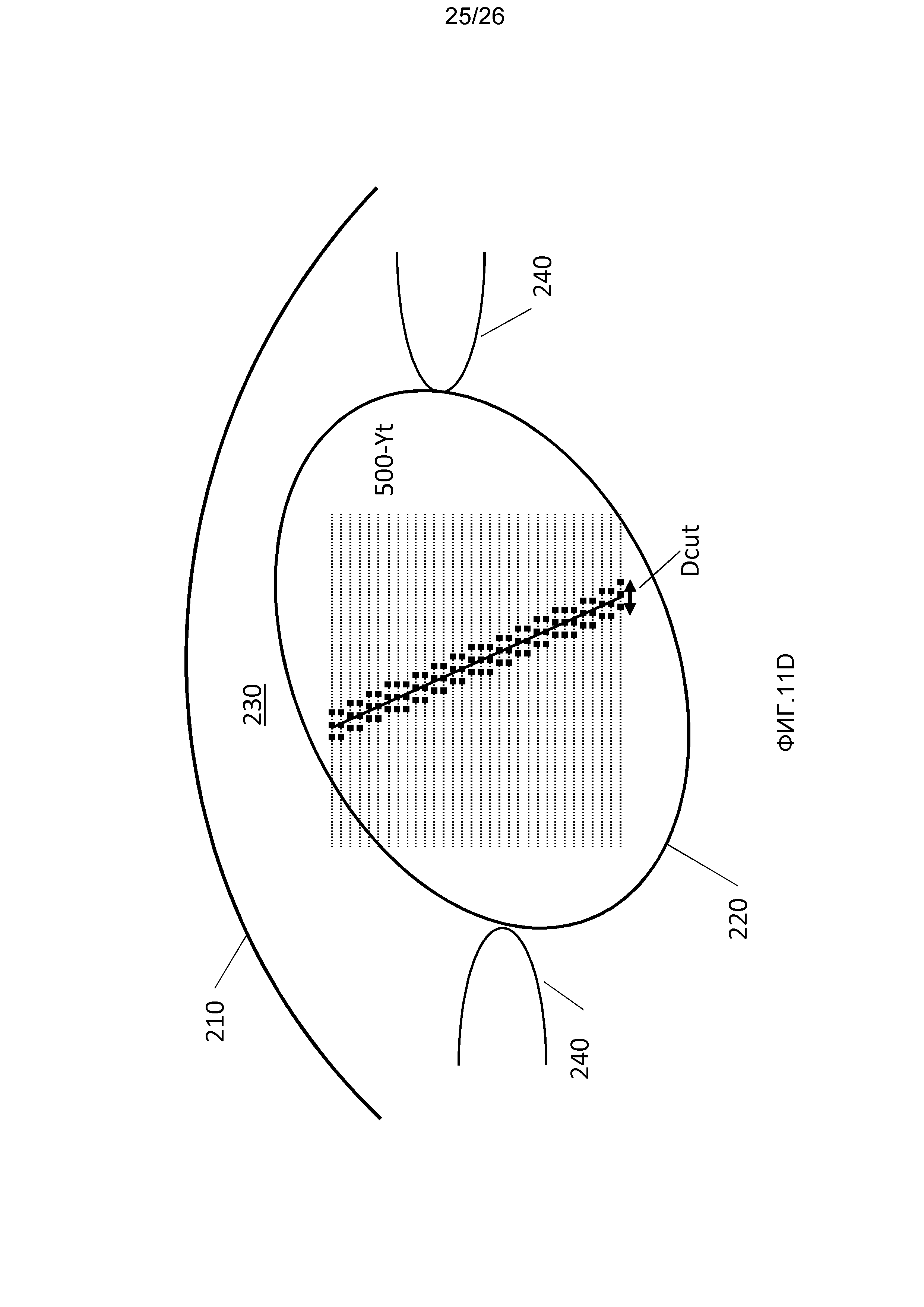
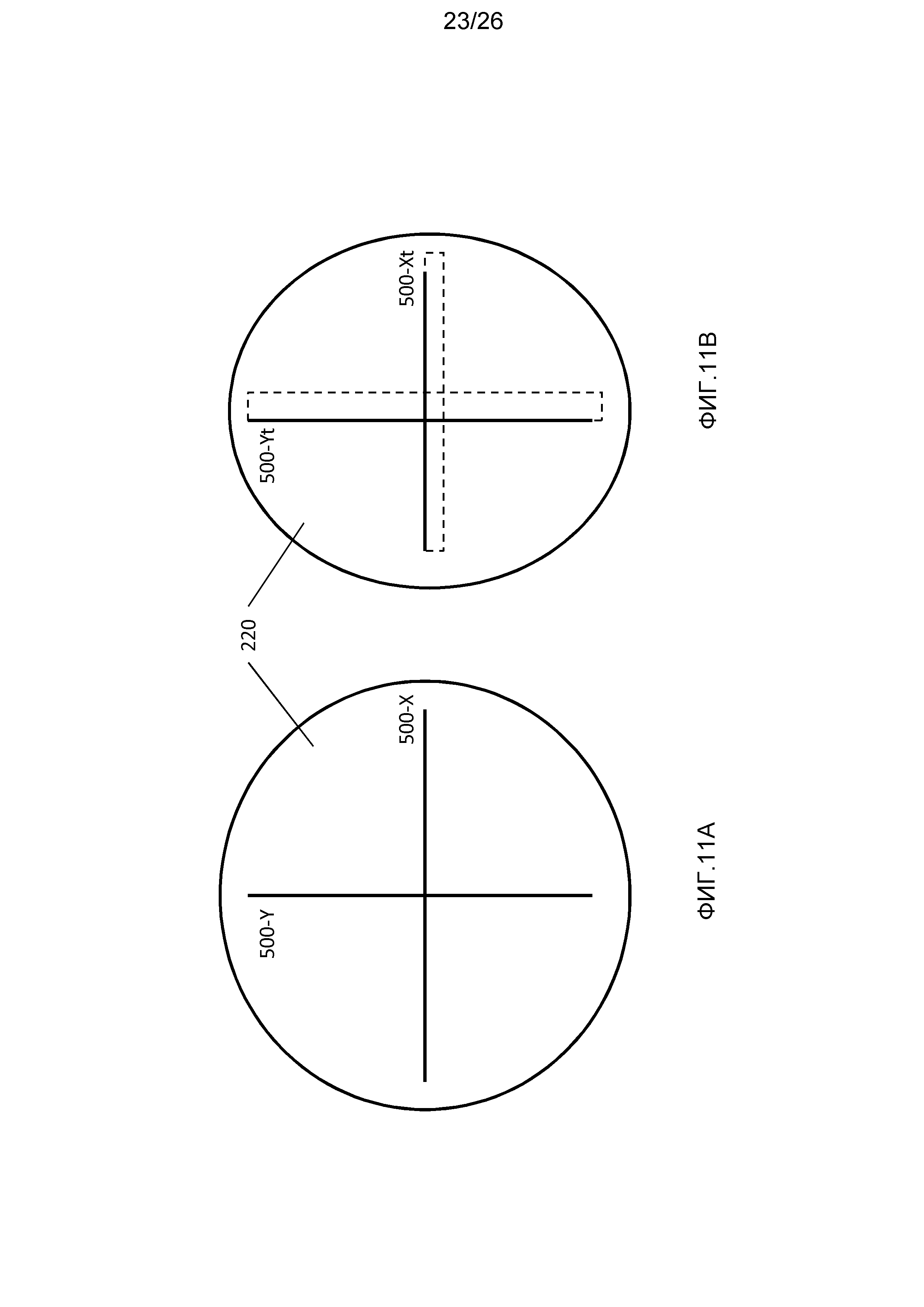
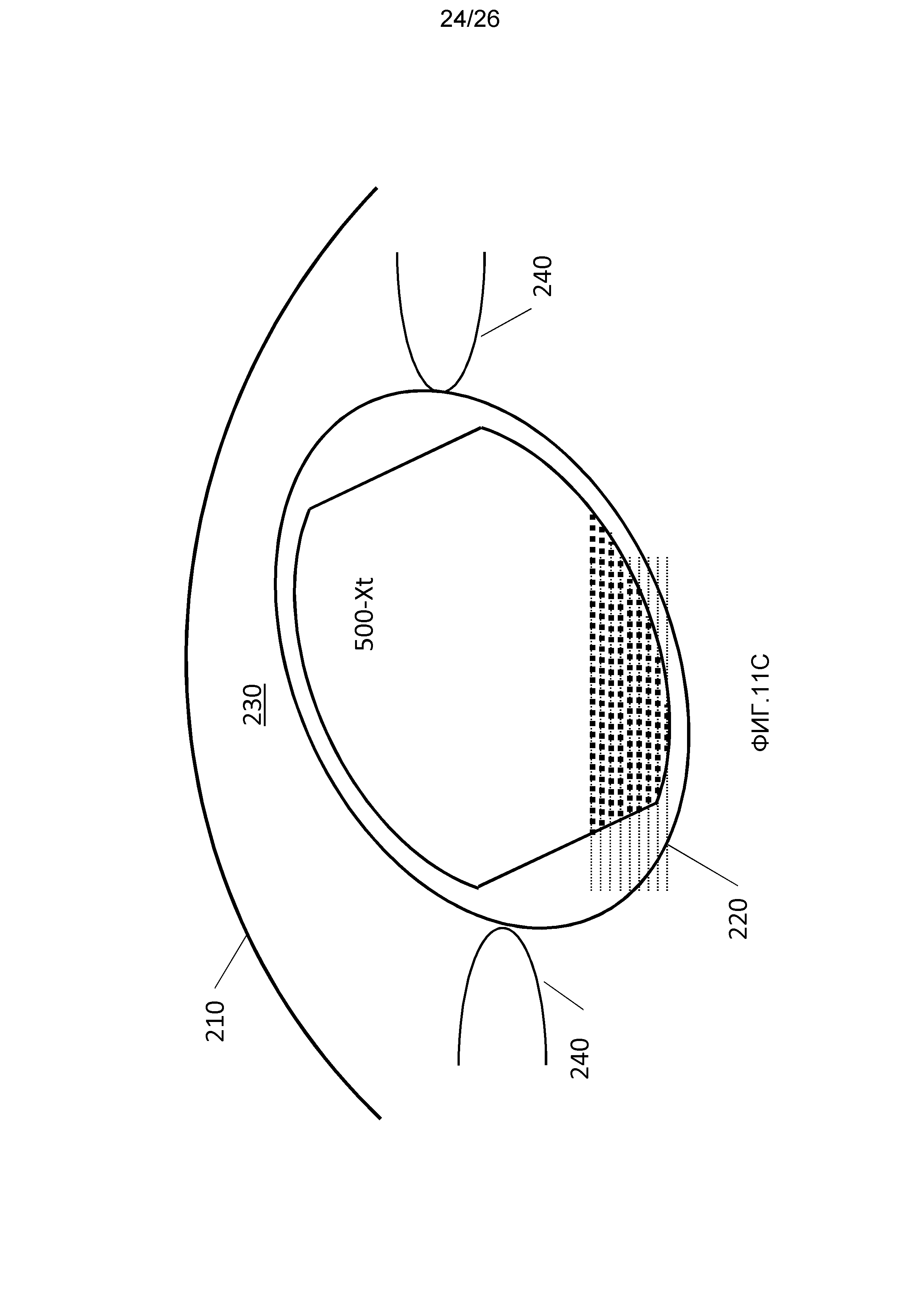
На фиг. 11A-D показано, что система 122 получения изображений лазерной системы 100 может отображать область в глазу, генератор 124 структур может формировать координаты точек растрового изображения для сканера 116 луча и ассоциировать параметр лазерной мощности с точками растрового изображения в зависимости от расстояния между точками и целевой структурой.
Примером такой целевой структуры может быть чоп-структура 500, содержащая чоп-плоскости 500-X и 500-Y. Такие чоп-структуры 500 могут использоваться для фрагментации хрусталика. На фиг. 11A показан случай, когда ось Z хрусталика 220 выровнена с осью z лазерной системы 100. В этом случае чоп-плоскости 500-X и 500-Y также параллельны оси z лазерной системы 100.
На фиг. 11B показано, что если хрусталик 220 наклонен относительно оси Z лазерной системы 100, как показано, например, на фиг. 4B, то чоп-плоскости 500-Xt и 500-Yt также могут быть наклонены. Так как растровое изображение часто содержит первое множество точек на первой фиксированной глубине по z, сопровождаемое вторым множеством на немного меньшей глубине по z, растровое изображение наклоненных чоп-плоскостей с лазерными системами, которые не могут регулировать мощность лазерного импульса, может приводить к созданию разрезов в капсулярной сумке 222, приводящих к обширным хирургическим сложностям.
Напротив, варианты осуществления лазерной системы 100 могут ассоциировать параметры лазера в зависимости от расстояния точек растрового изображения до чоп-плоскостей 500-Xt и 500-Yt.
На фиг. 11C-D показаны точки растрового изображения с низкой и высокой лазерной мощностью, формируемые генератором 124 структур, чтобы сформировать наклонные плоскости разреза 500-Xt и 500-Yt. Очевидно, создание разрезов, регулируя импульсную лазерную мощность в зависимости от их близости к целевой структуре, может помочь избежать разреза в капсулярном мешке, что является главным хирургическим преимуществом.
На фиг. 11D ясно видно, что, как это имело место в случае полосы 257 слежения, параметр лазерной мощности, соответствующей фоторазрушению, может быть ассоциирован с точками сканирования, находящимися ближе к целевой структуре 500-Xt и 500-Yt, чем заданное расстояние Dcut, и параметр лазерной мощности, не приводящей к фоторазрушению, может быть ассоциирован с точками сканирования, находящимися дальше от целевой структуры, чем заданное расстояние Dcut.
В других реализациях поверхность разреза может быть круговым поверхностным сегментом, спиральным поверхностным сегментом, разрезом доступа к роговице или частичным релаксационным разрезом.
На фиг. 12A-B показано, что в некоторых случаях целевая структура 260-2 может быть целевым объемом с осью, наклоненной относительно оптической оси лазерной системы 100. Здесь растровое изображение содержит в себе цилиндрические структуры 260-1 и параметр лазерной мощности для точек этого растрового изображения регулируется, чтобы формировать наклонный объемный разрез 260-2. Такой параметр может быть полезен, например, для коррекции преломляющего свойства хрусталика 220.
В некоторых реализациях генератор 124 структур может быть выполнен с возможностью ассоциирования параметров лазерной мощности с точками растрового изображения с созданием зависимости этих параметров от расстояния между точками и офтальмологическим слоем, отображаемым системой 122 получения изображений.
Хотя настоящее описание содержит много подробностей, они не должны считаться ограничениями объема изобретения или того объема, который может быть заявлен, а служить лишь описанием признаков, конкретных для частных вариантов осуществления. Некоторые признаки, приведенные в этом описании в контексте отдельных вариантов осуществления, могут быть также реализованы с объединением в едином варианте осуществления. Напротив, различные признаки, которые описаны в контексте единого варианта осуществления, могут быть также реализованы отдельно в многочисленных вариантах осуществления или в любой подходящей комбинации. Кроме того, хотя признаки могут быть описаны выше как действующие в определенных комбинациях и даже первоначально заявляться как таковые, в некоторых случаях один или более признаков заявленной комбинации могут быть исключены из комбинации и заявленная комбинация может быть отнесена к подкомбинации или измененной подкомбинации.

Оптическая система для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система с множественными сканерами для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система с регулируемыми каскадами для офтальмологического лазерного скальпеля
Оптическая система с подвижной линзой для офтальмологического хирургического лазера
Стыковка с управлением по изображениям для офтальмологических хирургических систем
Формирование изображений операционной ткани-мишени посредством нелинейного сканирования
Оптическая система для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система с множественными сканерами для офтальмологического хирургического лазера
Оптическая система для офтальмологического хирургического лазера
Оптическая система с регулируемыми каскадами для офтальмологического лазерного скальпеля
Оптическая система с подвижной линзой для офтальмологического хирургического лазера
Стыковка с управлением по изображениям для офтальмологических хирургических систем
Формирование изображений операционной ткани-мишени посредством нелинейного сканирования

