Результат интеллектуальной деятельности: СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ БОЕВОГО ДИСТАНЦИОННО-УПРАВЛЯЕМОГО МОДУЛЯ И ТРАНСФОРМИРУЕМЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к оборонной технике и, в частности, к способам проведения испытаний дистанционно-управляемых устройств, оснащенных системой вооружения и устанавливаемых на шасси наземных транспортных средств.
Известны способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления (патент RU №2475696 С1, опубл. 20.02.13 г., Бюл. №5), принятый за прототип.
Способ контроля электрических параметров системы вооружений заключается в том, что проверку электрических параметров контролируемого изделия осуществляют посредством электрического подсоединения устройства для проверки к электрической системе контролируемого изделия при помощи электроразъема, установленного на контролируемом изделии и предназначенного для проверки его электрической системы. Перед контролем электрических параметров электрической системы контролируемого изделия блоки устройства для проверки соединяются по схеме с подключением к эквиваленту контролируемого изделия, далее осуществляется режим самоконтроля (самотестирования) устройства для проверки, после завершения режима самоконтроля и получения положительного результата блоки устройства для проверки соединяются по схеме с подключением реально контролируемого изделия и производится автоматизированный режим контроля параметров электрической системы контролируемого изделия, при этом оба режима контроля обеспечиваются программой с заданными стимулирующими (управляющими) сигналами, прохождение программ контроля сопровождается выводом визуальной информации на индикаторы, а все остановки сопровождаются звуковыми сигналами, по окончании контроля контролируемых изделий устройство для проверки может быть переведено в режим контроля времени наработки устройства для проверки.
Автоматизированный комплекс содержит проверочный блок, электрическую систему контролируемого изделия, электроразъемы проверочного блока и изделия, соединительные кабели. Проверочный блок автоматизированного комплекса состоит из комплекта раздельных законченных функциональных блоков: блока трансформаторов, блока питания, блока контроля, блока дистанционного управления с индикатором и устройством звуковой сигнализации, блока распределительного, выполненного с возможностью обеспечения программного формирования стимулирующих сигналов, автоматизированный комплекс оснащен имитаторами сигналов в виде эквивалента пускового механизма ракеты и стендом-имитатором ракеты, блоки автоматизированного комплекса выполнены с возможностью соединения при помощи комплекта кабелей с электроразъемами по различным схемам, соответствующим проверяемому изделию (ракета или пусковой механизм) и установленному режиму функционирования: режиму самоконтроля, режиму проверки и режиму контроля времени наработки автоматизированного комплекса.
Недостатками прототипа являются:
- недостаточная степень универсальности устройства для проверки, предназначенного только для контроля узкого спектра проверок;
- недостаточная производительность;
- высокая стоимость контрольного оборудования и трудоемкость при проведении испытаний.
Предлагаемым изобретением решается задача по повышению эффективности и удешевлению проведения контроля дистанционно-управляемых устройств, оснащенных системой вооружения, с помощью комплекта средств, реализующего данный способ.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа оценки параметров боевого дистанционно-управляемого модуля и трансформируемого комплекта для его реализации, обладающих возможностью быстрой трансформации схемных исполнений для реализации соответствующих пунктов контроля.
Указанный технический результат достигается тем, что в предлагаемом способе оценки параметров боевого дистанционно-управляемого модуля, заключающемся в том, что проверку параметров контролируемого изделия осуществляют посредством электрического подсоединения устройства для проверки к электрической системе контролируемого изделия, перед контролем параметров контролируемого изделия блоки устройства для проверки соединяются по схеме с подключением к контролируемому изделию, новым является то, что для проведения оценки параметров боевого дистанционно-управляемого модуля используется комплекс средств, выполненный с возможностью трансформации схемы подключения проверяемого изделия и реализации 8-ми схемных решений Сх.1-Сх.8, схемное решение Сх.1 реализуется для выполнения следующих проверок: при подготовке поворотной платформы модуля к работе в тестовом режиме, при проверке сектора и угла наблюдения и обстрела, при проверке перебросочной скорости поворотной платформы в горизонтальной и вертикальной плоскости, при проверке стабилизации поворотной платформы в горизонтальной и вертикальной плоскостях во время движения подвижного объекта, при проверке возможности дистанционного взвода системы вооружения, при проверке обеспечения ручного режима выбора и запоминания в произвольной последовательности не менее десяти неподвижных целей, при проверке передачи данных между блоком ЭВМ и поворотной платформой модуля по кабельным каналам связи на расстоянии не менее 100 м, при проверке возможности подачи тонального звукового сигнала, при проверке работоспособности изделия при изменении напряжения электропитания, при проверке времени готовности к работе поворотной платформы, при проверке измерения расстояния с помощью дальномера, при проверке разрешающей способности системы наблюдения, при проверке обеспечения ввода информации с клавиатуры и функционирования координатно-указательного устройства трекбола и джойстика, при проверке уровня создаваемых индустриальных помех, при проверке устойчивости поворотной платформы к климатическим и механическим воздействиям, схемное решение Сх.2 реализуется при проверке потребляемой мощности при нормальной и пониженной температуре окружающей среды, схемное решение Сх.3 реализуется при проверке возможности выбора режима стрельбы и длительности очереди системы вооружения, схемное решение Сх.4 реализуется при проверке защиты от «переполюсовки» питающего напряжения, схемное решение Сх.5 реализуется при проверке возможности подключения к блоку ЭВМ до четырех поворотных платформ, схемное решение Сх.6 реализуется при проверке времени непрерывной работы модуля, схемное решение Сх.7 реализуется при проверке автоматического сопровождения цели, схемное решение Сх.8 реализуется при проверке обеспечения обмена данных через порты Ethernet.
Этот способ оценки параметров боевого дистанционно-управляемого модуля реализуется с помощью предлагаемого трансформируемого комплекса, содержащего проверочный блок, состоящий из комплекта раздельных законченных функциональных блоков, электрическую систему контролируемого изделия, электроразъемы проверочного блока и изделия, комплект соединительных кабелей, в котором новым является то, что проверочный блок содержит два блока питания, технологические клавиатуру, видеомонитор и компьютер, осциллограф, вольтметр и вольтамперметр, накопитель USB, эквивалент нагрузки, комплект кабелей: три кабеля питания, кабель интерфейса из комплекта технологического видеомонитора, кабель Ethernet, при проверке работоспособности системы стабилизации поворотной платформы в горизонтальной и вертикальных плоскостях во время движения подвижного объекта используется колесная тележка, выполненная с возможностью поворота вокруг своей оси и изменения своего горизонтального положения.
Использование для проведение оценки параметров боевого дистанционно-управляемого модуля комплекса средств, выполненного с возможностью трансформации схемы подключения проверяемого изделия и реализации 8-ми схемных решений Сх.1-Сх.8 позволяет:
- повысить производительность при проведении испытаний;
- снизить номенклатуру и стоимость испытательного оборудования при большом объеме испытаний.
Реализация схемного решения Сх.1 позволяет:
- выполнить работы по подготовке поворотной платформы модуля к работе в тестовом режиме;
- выполнить оценку отработки поворотной платформой задач по назначению;
- оценить взаимодействие поворотной платформы и блока ЭВМ;
- проверить устойчивость поворотной платформы к внешним воздействиям.
Реализация схемного решения Сх.2 позволяет оценить потребляемую мощность при различных температурных условиях окружающей среды.
Реализация схемного решения Сх.3 позволяет оценить боевые возможности системы вооружения.
Реализация схемного решения Сх.4 позволяет оценить уровень защиты от «переполюсовки» питающего напряжения.
Реализация схемного решения Сх.5 позволяет оценить возможность подключения к блоку ЭВМ нескольких поворотных платформ.
Реализация схемного решения Сх.6 позволяет оценить время непрерывной работы модуля.
Реализация схемного решения Сх.7 позволяет оценить возможность автоматического сопровождения цели.
Реализация схемного решения Сх.8 позволяет оценить возможность обеспечения обмена данных через порты Ethernet.
Включение в состав проверочного блока двух блоков питания позволяет подать питающее напряжение на поворотную платформу и блок ЭВМ.
Включение в состав проверочного блока технологической клавиатуры, видеомонитора, накопителя USB, технологического компьютера, осциллографа, вольтметра и вольтамперметра, комплекта кабелей, эквивалента нагрузки позволяет обеспечить проверки информационной системы модуля, линий связи между поворотной платформой и блоком ЭВМ, уровень и длительность проходящих сигналов управления.
Использование колесной тележки, выполненной с возможностью поворота вокруг своей оси и изменения своего горизонтального положения, позволяет проверить стабилизацию поворотной платформы во время движения подвижного объекта.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
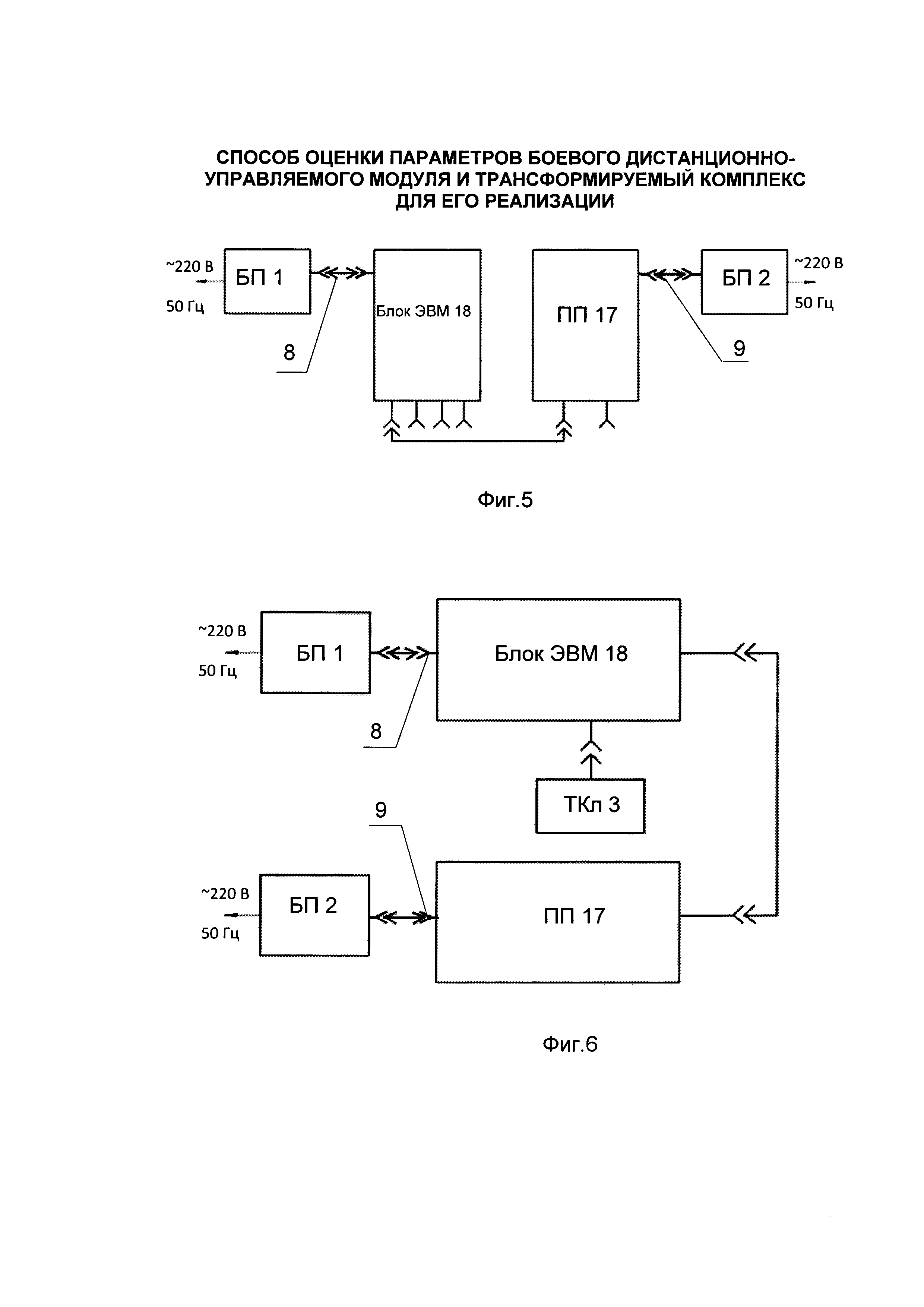
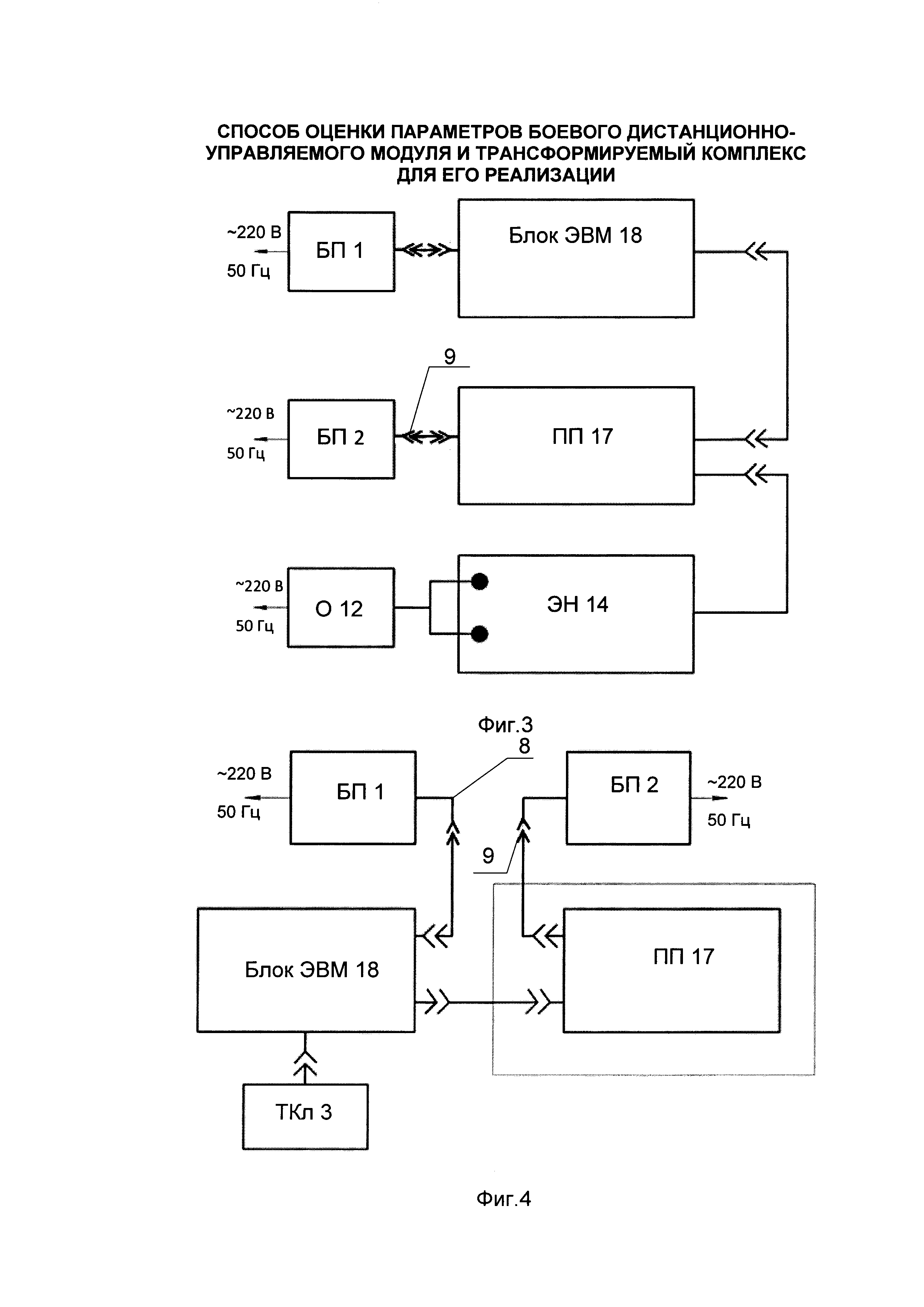
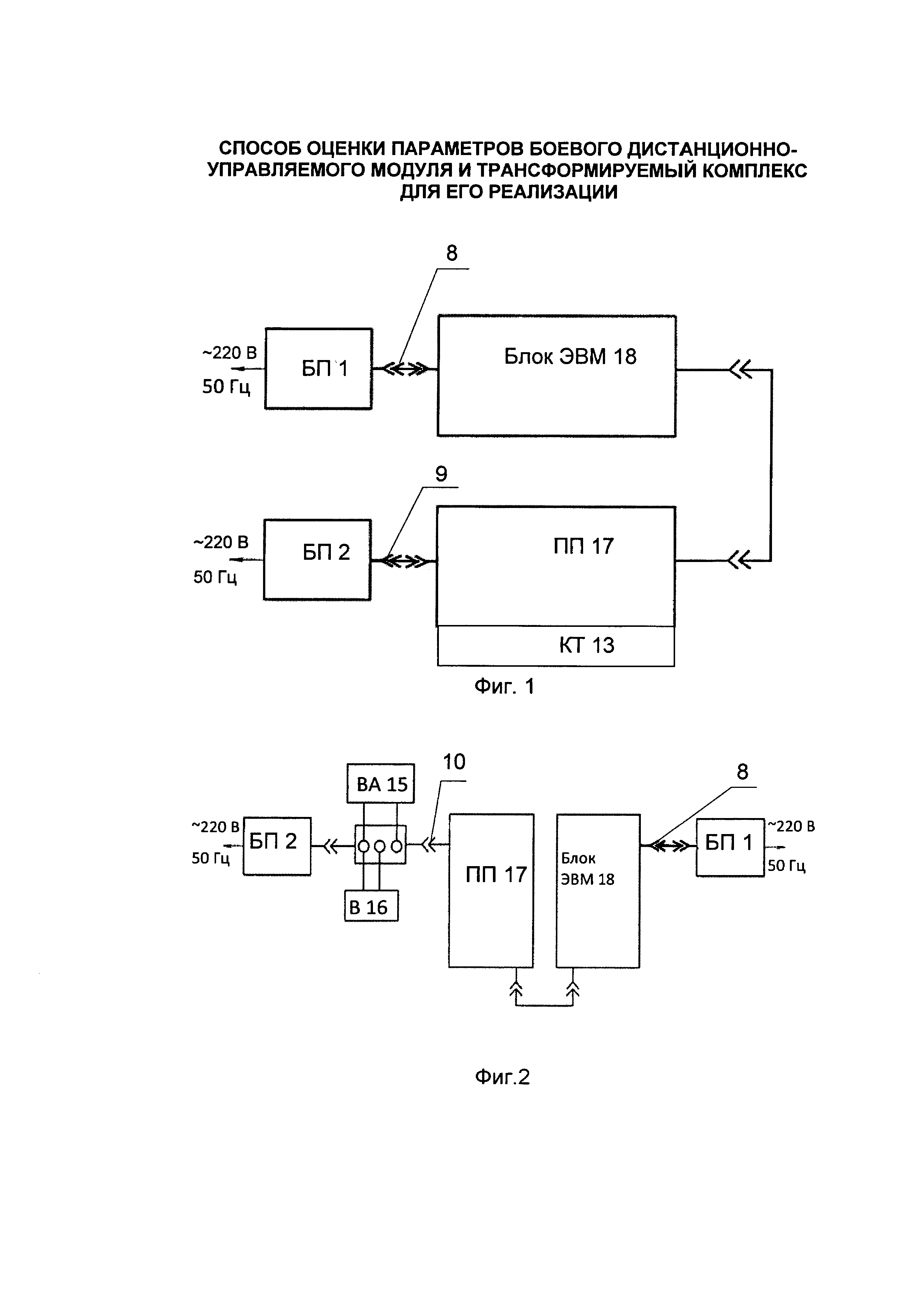
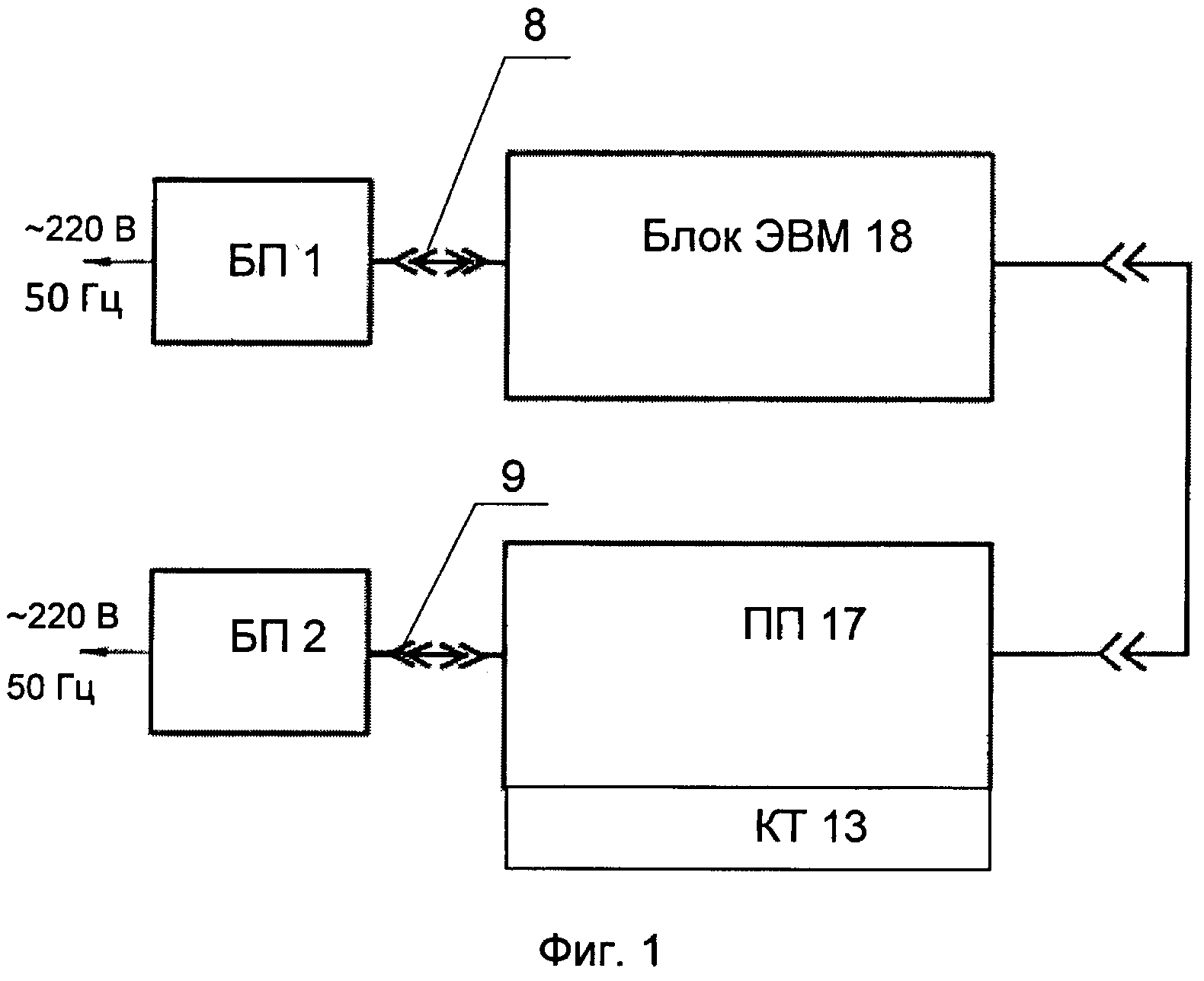
Сущность изобретения поясняется чертежами, где на фиг. 1 - фиг. 8 показаны схемы подключения изделия.
Трансформируемый комплекс для реализации данного способа содержит проверочный блок, два блока питания (БП) 1 и 2, технологическую клавиатуру (ТКл) 3, технологический видеомонитор (ТВ) 4, накопитель USB (Н USB) 5, технологический компьютер (TK) 6, комплект кабелей: кабель Ethernet 7, три кабеля питания (КП) 8, 9, 10, кабель интерфейса (КИ) 11 из комплекта ТВ 4, осциллограф (О) 12, колесную тележку (KT) 13, выполненную с возможностью поворота вокруг своей оси и изменения своего горизонтального положения, эквивалент нагрузки (ЭН) 14, вольтамперметр (ВА) 15, вольтметр (В) 16.
Способ оценки параметров боевого дистанционно-управляемого модуля реализуется при помощи трансформируемого комплекса следующим образом.
1 Использование схемного решения Сх.1.
1.1 Использование схемного решения Сх.1 при подготовке поворотной платформы (ПП) 17 модуля к работе в тестовом режиме происходит следующим образом. Испытания проводят с установленным на ПП 17 ЭН 14, равным массе системы вооружения с полным боекомплектом.
Включается изделие. После загрузки программы управления ПП 17 на экране блока ЭВМ 18 появляется интерфейс программы управления ПП 17. Программа управления автоматически производит установку ПП 17 в «нулевое положение».
Для завершения работы программы управления ПП 17 и перехода к тестовой программе выполняют следующие действия: выполняют подключение изделия к проверочному блоку по схеме Сх.1, вводят с ТКл 3 командное слово и нажимают клавишу «Enter», при этом на экране должен появиться список тестов, для проверки выбирают необходимый тест.
1.2 Использование схемного решения Сх.1 при проверке сектора и угла наблюдения и обстрела проводится следующим образом.
Изделие включают. Визуально фиксируют изображение на экране блока ЭВМ 18 от видеокамеры и установку ПП 17 в «нулевое положение». Отклоняют джойстик вправо и удерживают в таком состоянии, пока ПП 17 не совершит полный оборот вокруг своей оси, что соответствует сектору наблюдения и обстрела 360 град. Аналогично проводят проверку при отклонении джойстика влево.
Отклоняют джойстик от себя и удерживают в таком состоянии, пока ПП 17 не переместится в крайнее верхнее положение. Измеряют максимальный угол перемещения вверх α1, который должен составлять не менее 60 град.
Отклоняют джойстик на себя и удерживают в таком состоянии, пока ПП 17 не переместится в крайнее нижнее положение. Измеряют максимальный угол перемещения вниз α2, который должен составлять не менее минус 20 град.
1.3 Использование схемного решения Сх.1 при проверке перебросочной скорости поворотной платформы в горизонтальной и вертикальной плоскости проводится следующим образом.
Проводят проверку перебросочной скорости по горизонтали.
Отклоняют джойстик вправо и удерживают в таком состоянии, пока ПП 17 не совершит поворот на 360 град. С помощью секундомера фиксируют время движения ПП 17. Перебросочную скорость по горизонтали определяют по формуле 
Проводят проверку перебросочной скорости по вертикали.
Отклоняют джойстик на себя и удерживают в таком состоянии, пока ПП 17 не придет в крайнее нижнее положение. Отклоняют джойстик до упора от себя и удерживают в таком состоянии, пока ПП 17 не придет в крайнее верхнее положение.
С помощью секундомера фиксируют время движения ПП 17 из крайнего нижнего положения в крайнее верхнее положение.
Перебросочную скорость по вертикали определяют по формуле:

где α1, α2 - угол перемещения ПП 18;
t - время движения ПП 17, с.
1.4 Использование схемного решения Сх.1 при проверке стабилизации поворотной платформы в горизонтальной и вертикальной плоскостях во время движения подвижного объекта проводится следующим образом.
Устанавливают ПП 17 на КТ 13. Изделие включают. Включают стабилизацию на функциональной клавиатуре блока ЭВМ 18.
Поворачивают КТ 13 с ПП 17 вокруг своей оси влево, потом - вправо, при этом привод горизонтального перемещения ПП 17 должен переместить ствол вправо, сохраняя направление ствола в пространстве постоянным. Возвращают КТ 1 с ПП 17 в начальное состояние.
Приподнимают передний край КТ 13 на несколько сантиметров, при этом привод вертикального перемещения ПП 17 должен опустить ствол вниз, сохраняя его направление в пространстве постоянным. Приподнимают задний край КТ 13 на несколько сантиметров, при этом привод вертикального перемещения ПП 17 должен поднять ствол вверх, сохраняя его направление в пространстве постоянным.
1.5 Использование схемного решения Сх.1 при проверке возможности дистанционного взвода системы вооружения проводится следующим образом.
Изделие включают. Нажимают кнопку взвода на блоке ЭВМ 18 и контролируют движение штока актуатора, установленного на постели с системой вооружения ПП 17. Шток актуатора должен начать выдвигаться и, достигнув крайнего положения, возвратиться в исходную позицию.
1.6 Использование схемного решения Сх.1 при проверке обеспечения ручного режима выбора и запоминания в произвольной последовательности не менее десяти неподвижных целей проводится следующим образом.
Включают видеокамеру. С помощью джойстика совмещают перекрестие на экране блока ЭВМ 18 с перекрестием на шаблоне, установленном на расстоянии 50 м. Нажимают кнопку на блоке ЭВМ 18 для сохранения. При этом на экране блока ЭВМ 18 точка наведения выделяется рамкой - данная цель сохранена.
Аналогично производят сохранение остальных перекрестий на шаблоне в произвольной последовательности.
1.7 Использование схемного решения Сх.1 при проверке передачи данных между блоком ЭВМ 18 и ПП 17 модуля по кабельным каналам связи на расстоянии не менее 100 м проводится следующим образом.
Изделие включают. Визуально фиксируют наличие на экране блока ЭВМ 18 изображения от видеокамеры и установку ПП 17 в «нулевое положение».
Отклоняют джойстик вправо, влево, от себя, на себя и контролируют движение ПП 17 вправо, влево, вверх и вниз соответственно.
1.8 Использование схемного решения Сх.1 при проверке возможности подачи тонального звукового сигнала, при проверке работоспособности изделия при изменении напряжения электропитания проводится следующим образом.
Изделие включают. В графическом интерфейсе на экране блока ЭВМ 18 выбирают пункт, связанный с подачей звукового сигнала. В открывшейся вкладке устанавливают частоту, уровень громкости, период повторения и длительность тонального сигнала, фиксируют наличие и характеристики звукового сигнала установленной частоты, громкости, периода повторения и длительности (на слух). Изменяют характеристики тонального звукового сигнала и сравнивают с предыдущим звуковым сигналом.
1.9 Использование схемного решения Сх.1 при проверке времени готовности ПП 17 к работе проводится следующим образом.
Изделие включают. С помощью секундомера фиксируют время появления изображения от видеокамеры на экране блока ЭВМ 18 и окончания установки ПП 17 в нулевое положение.
1.10 Использование схемного решения Сх.1 при проверке измерения расстояния с помощью дальномера, установленного на ПП 17, проводится следующим образом.
С помощью джойстика или сенсорного экрана совмещают перекрестие на экране блока ЭВМ 18 с перекрестием шаблона. На рукоятке джойстика блока ЭВМ 18 нажимают кнопку дальномера. В графическом интерфейсе на экране блока ЭВМ 18 контролируют показания дальномера - измеренное расстояние от объектива видеокамеры до перекрестия шаблона.
1.11 Использование схемного решения Сх.1 при проверке разрешающей способности системы наблюдения проводится следующим образом.
Изделие включают. Транспарант с изображением тестовой таблицы шаблона располагают на таком расстоянии от ПП 17, при котором размеры изображения на экране блока ЭВМ 18 совпадают с размерами экрана. Устанавливают освещенность тестовой таблицы 100000 лк, определяют разрешающую способность в центральной части экрана по тестовой таблице на экране.
1.12 Использование схемного решения Сх.1 при проверке обеспечения ввода информации с клавиатуры и функционирования координатно-указательного устройства трекбола и джойстика проводится следующим образом.
Включают блок ЭВМ 18. Производят проверку возможности ввода символов с клавиатуры и движения курсора координатно-указательного устройства трекбола. При нажатии на клавишу на экране изделия должен отображаться соответствующий символ. Перемещают координатно-указательное устройство и контролируют движение курсора по рабочему полю экрана изделия. Производят проверку работы джойстика. Отклоняют джойстик вправо до упора, контролируют наличие диалогового сообщения на экране изделия. Отклоняют джойстик влево до упора, контролируют наличие диалогового сообщения на экране. Отклоняют джойстик на себя до упора, контролируют наличие диалогового сообщения на экране. Отклоняют джойстик от себя до упора, контролируют наличие диалогового сообщения на экране.
1.13 Использование схемного решения Сх.1 при проверке уровня создаваемых индустриальных помех проводится следующим образом.
Изделие включают и переводят в режим активного наблюдения. В ходе проверки оценивают уровень индустриальных помех, создаваемых изделием.
1.14 Использование схемного решения Сх.1 при проверке устойчивости поворотной платформы к климатическим и механическим воздействиям проводится следующим образом.
Перед испытаниями проводят визуальный контроль составных частей и проверку параметров. Далее проводят соответствующий комплекс проверок устойчивости к внешним факторам.
После окончания воздействия проводят осмотр ПП 17 и блока ЭВМ 18 и проверку параметров.
2 Использование схемного решения Сх.2 при проверке потребляемой мощности при нормальной и пониженной температуре окружающей среды проводится следующим образом.
2.1 Проверка потребляемой мощности ПП 17 и блока ЭВМ 18 в нормальных условиях.
Включают изделие. Отклоняют джойстик на блоке ЭВМ 18 до упора от себя и вправо и во время движения ПП 17 измеряют ток, потребляемый ПП 17. Затем отклоняют джойстик на блоке ЭВМ 18 до упора на себя и влево и во время движения ПП 17, измеряют потребляемый ток. Потребляемую мощность Р вычисляют по формуле:
P=U×I
где U - напряжение питания, В;
I - максимальное значение измеренного тока потребления ПП, А. Контроль тока и напряжения производят с помощью ВА 15 и В 16.
2.2 Проверка потребляемой мощности блока ЭВМ 18 при пониженной температуре.
Номинальное, минимальное и максимальное напряжение электропитания устанавливают на блоке питания БП 1.
Блок ЭВМ 18 помещают в термокамеру. В камере устанавливают пониженную температуру минус 40°С. Изделие в выключенном состоянии выдерживают в течение одного часа, после выдержки в нормальных условиях измеряют потребляемый ток.
3 Использование схемного решения Сх.3 при проверке возможности выбора режима стрельбы и длительности очереди системы вооружения проводится следующим образом.
На ПП 17 устанавливают ЭН 14. Изделие включают. Визуально фиксируют на экране блока ЭВМ 18 изображение от видеокамеры и установку ПП 17 в «нулевое положение». Устанавливают переключатель на разрешение огня на блоке ЭВМ 18, предварительно подняв предохранительную планку.
Устанавливают режим стрельбы очередями, устанавливают длительность очереди - короткая. Нажимают клавишу электроспуска и фиксируют на О 12 длительность импульса.
Устанавливают длительность очереди - длинная. Нажимают клавишу электроспуска и фиксируют на О 12 длительность импульса.
Устанавливают непрерывный режим стрельбы. Нажимают клавишу электроспуска и удерживают ее в течение 3-5 с. Фиксируют длительность импульса на О 12, которая должна соответствовать длительности нажатия на клавишу.
4 Использование схемного решения Сх.4 при проверке защиты от «переполюсовки» питающего напряжения проводится следующим образом.
Изделие включают. Визуально фиксируют наличие на экране блока ЭВМ 18 изображения от видеокамеры и перемещение ПП 17. Минусовую клемму КП 8 подключают к «+», а плюсовую клемму к «-» источника питания БП 1.
Изделие включают. По амперметру источника питания убеждаются, что ток потребления не более 50 мА. Изделие отключают. Меняют местами клеммы подключения. Изделие включают и визуально фиксируют наличие на экране изображения от видеокамеры и перемещение ПП 17. Изделие отключают.
На источнике питания БП1 устанавливают ток ограничения 0,5 А. Минусовую клемму КП 8 подключают к «+», а плюсовую клемму к «-».
Изделие включают. По амперметру источника питания убеждаются, что ток потребления не более 50 мА.
5 Использование схемного решения Сх.5 при проверке возможности подключения к блоку ЭВМ 18 до четырех ПП 17 проводится следующим образом.
Изделие включают. Визуально фиксируют наличие изображения на экране блока ЭВМ 18 от видеокамеры и движение ПП 17 при отклонении джойстика. Проводят подключение ПП 17 к блоку ЭВМ 18 по различным линиям связи.
В ходе испытаний оценивают работоспособность изделия при всех вариантах соединения блока ЭВМ 18 и ПП 17.
6 Использование схемного решения Сх.6 при проверке времени непрерывной работы модуля проводится следующим образом.
Перед испытаниями проводят визуальный контроль составных частей и проверку параметров. Изделие включают и переводят в режим активного наблюдения. Изделие выдерживают в течение 24 ч, визуально наблюдая на экране изображение от видеокамеры и движение ПП 17. После окончания испытания проводят визуальный контроль составных частей и проверку параметров.
7 Использование схемного решения Сх.7 при проверке автоматического сопровождения цели проводится следующим образом.
Изделие включают. Переходят в режим сопровождения цели. На экране блока ЭВМ 18 выделяют движущийся белый квадрат рамкой синего цвета. При захвате цели она выделяется рамкой зеленого цвета. В течение 20 секунд контролируют одновременное перемещение белого квадрата с рамками зеленого и синего цвета и перемещение ПП 17.
8 Использование схемного решения Сх.8 при проверке обеспечения обмена данных через порты Ethernet проводится следующим образом.
8.1 Проверка ПП.
Изделие включают, выбирают соответствующий тест. Контролируют наличие диалогового сообщения на экране ТВ 4, что тест пройден.
9.2 Проверка блока ЭВМ.
Включают блок ЭВМ 18, выбирают соответствующий тест. Контролируют наличие диалогового сообщения на экране изделия, что тест пройден.
Таким образом, в предлагаемом способе оценки параметров боевого дистанционно-управляемого модуля и трансформируемом комплексе для его реализации решена задача по достижению технического результата, заключающегося в создании способа оценки параметров боевого дистанционно-управляемого модуля и трансформируемого комплекта для его реализации, обладающих возможностью быстрой трансформации схемных исполнений для реализации соответствующих пунктов контроля.
Система для определения и обеспечения показателей надёжности объекта военной техники
Имитатор воздушных целей
Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Регулируемый спусковой механизм огнестрельного оружия
Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства
Способ приема и передачи топопривязчиком дифференциальных поправок
Способ контроля точностных характеристик системы топопривязки и навигации
Автоматизированное рабочее место для обучения расчета топопривязчика
Подвижный контрольный пункт
Пулемет
Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Регулируемый спусковой механизм огнестрельного оружия
Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства
Способ приема и передачи топопривязчиком дифференциальных поправок
Способ контроля точностных характеристик системы топопривязки и навигации
Автоматизированное рабочее место для обучения расчета топопривязчика
Подвижный контрольный пункт
Пулемет
Способ функционирования боевого дистанционно управляемого модуля в различных режимах применения
Модульная установка предъявления появляющейся цели

