Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДВУХ ДИРЕКЦИОННЫХ УГЛОВ И ОДНОГО УГЛА МЕСТА
Вид РИД
Изобретение
Изобретение относится к области обнаружения и определения координат летательных аппаратов и может быть использовано в военной технике.
Известны различные способы определения координат объектов с использованием способов передачи и приема радиосигналов наземных радиомаяков (патент РФ №2436232) и способ триангуляции целей (патент РФ №2423720) [1, 2]. Недостатками данных способов является сложность обработки информации полученной от пунктов обнаружения объектов, использование только активного радиолокационного диапазона электромагнитных волн.
Способ автоматизированного определения координат беспилотных летательных аппаратов (патент РФ №2523446 - прототип) [3] заключается в применении камер кругового обзора, видеомонитора, ориентированного в пространстве, ЭВМ и лазерного дальномера для подсветки летательного аппарата, отличается тем, что камеры кругового обзора размещены симметрично и направлены в разные стороны, так чтобы вести наблюдение на 360° в оптическом диапазоне электромагнитных волн днем и ночью, и появление летательного аппарата фиксируется автоматически как помеха, возникающая на кадре видеопоследовательности относительно предыдущего, а полученные данные обрабатываются на ЭВМ, где вырабатываются угловые значения местонахождения летательного аппарата по высоте по горизонту относительно центра углоизмерительного устройства, которое с помощью поворотных механизмов направляет лазерный дальномер на летательный аппарат для измерения дальности до него, затем измеренная дальность от летательного аппарата поступает на устройство обработки и отображения информации (ЭВМ), где происходит автоматизирование определение пространственных координат ХБЛА, УБЛА, ZБЛА летательного аппарата.
Основными недостатками являются демаскирующая составляющая данного способа, связанная с использованием лазерного излучения, что снижает эффективность использования приведенного способа по обнаружению и определению пространственных координат летательных аппаратов в скрытом режиме работы, а также большие ошибки поворотных механизмов в процессе наведения лазерного дальномера и обработки полученной информации.
Как общий недостаток данных способов определения координат летательных аппаратов - неполное использование данных измерений и как следствие немаксимальная точность.
Задачей, стоящей перед настоящим изобретением, является повышение точности определения координат летательных аппаратов и уменьшение времени на обработку полученной информации в пассивном и активном режимах работы.
Поставленная задача решается следующим образом.
В настоящее время пеленгационный метод определения координат объектов широко распространен в практике оптических и радиолокационных внешнетраекторных измерений. Он основан на измерении угловых координат объекта в горизонтальной (азимут или дирекционный угол) и вертикальной (угол места) плоскостях (фиг. 1). В этом случае достаточно двух измерительных пунктов (ИП), чтобы однозначно определить пространственные координаты летательного аппарата.
В результате измерений с двух ИП определяются величины дирекционных углов и углов места (α1; ε1) и (α2; ε2), по которым пересчитываются координаты объекта в прямоугольной геодезической системе координат.

где Б - база, т.е. расстояние между ИП;
АХ - азимут (дирекционный угол) с одного ИП на другой.
Дальнейшие обязательно синхронные измерения этих углов позволяют вычислять координаты объекта, относящиеся к последующим моментам времени.
Но уже в этом случае обращает на себя внимание тот факт, что в совокупности измеряемых параметров, которые составляет четверка чисел, содержится определенная избыточность данных, так как минимальная информация, необходимая для определения положения центра масс объекта (летательного аппарата) в любой СК, должна содержать три независимых измерения. Также об этом говорит то, что число степеней свободы материальной точки равно трем. Это обстоятельство подтверждается и видом указанных выше зависимостей, которые в качестве аргументов содержат лишь три величины (A1, A2, ε1). Обычно четвертый параметр либо совсем отбрасывается, либо в лучшем случае используется для контроля. Однако и в том и другом случае информация теряется.
Из теории известно, что пара чисел (α; ε) геометрически однозначно определяет прямую в пространстве. При наличии двух измерительных пунктов таких прямых можно построить две. Данные прямые пересекаются в точке, где в момент засечки находится объект. Однако при наличии ошибок измерений прямые ИПi-О в общем случае не пересекутся в одной точке, а будут являться скрещивающимися. Истинное положение объекта будет определяться некоторой областью пространства, которая будет тем больше, чем ниже точность измерений величин (Ai, εi). Повышения достоверности результатов можно добиться, увеличивая число ИП, но в этом случае использовать классические зависимости (1) не представляется возможным. Таким образом, необходимо искать иные пути обработки результатов ВТИ.
Минимальная информация, необходимая для определения положения центра масс объекта (летательного аппарата) в любой СК, должна содержать три независимых измерения.
В дальнейшем задача сводится к пересчету тройки исходных величин сферической СК в тройку искомых величин прямоугольной СК. Число возможных сочетаний троек чисел из четырех равно С3 4=4. Здесь возможны два принципиально разных геометрических подхода к решению задачи определения объекта.
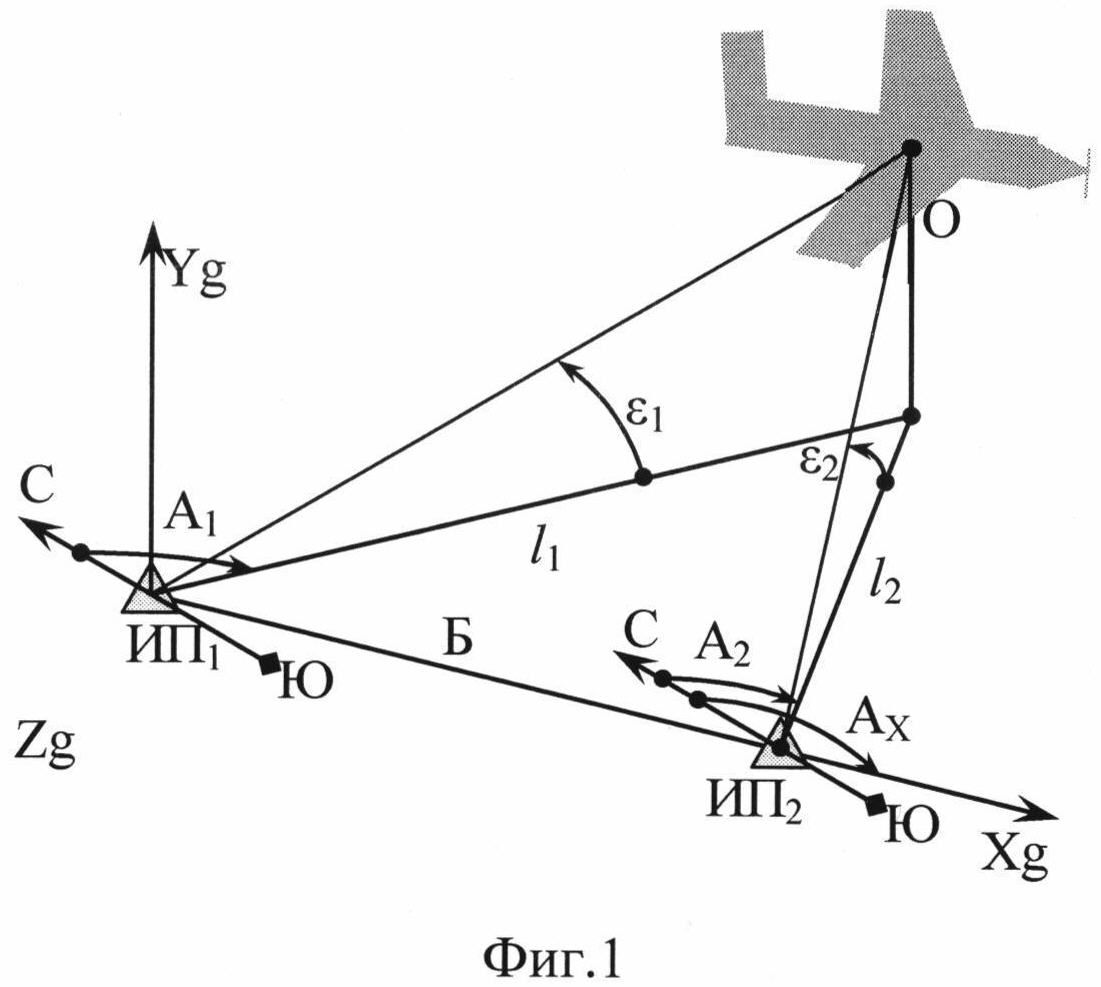
Из четырех измеренных величин выберем (α1; ε1; α2) или (α1; α2; ε2). Из них две величины (α1; ε1) определяют линию, проходящую через ИΠ1 в направлении на объект. Геометрическим местом точек, для которых величина α2=cosnt, есть вертикальная плоскость, проходящая через ИП2 (фиг. 2). Таким образом, положение объекта будет определяться точкой пересечения прямой и плоскости.
В общем случае плоскость и прямая в пространстве могут располагаться одним из следующих образов.
1. Прямая принадлежит плоскости. В этом случае общих точек у этих объектов будет бесконечное множество.
2. Прямая параллельна плоскости, но не принадлежит ей. В этом случае общих точек у этих объектов нет.
3. Прямая пересекает плоскость. В этом случае прямая и плоскость имеют одну общую точку.
Определим координаты летательного аппарата в ГСК XгhгYг, используя для этого минимум необходимой информации, т.е. три независимые величины, например (α1; α2; ε2). Составим уравнение вертикальной плоскости (1), проходящей через ИП1 в направлении α1. С этой целью рассмотрим единичный горизонтальный вектор А (фиг.2). Проекции этого вектора на оси ГСК будут равны (cos α1; 0; sinα1). Единичный вертикальный вектор  будет иметь координаты (0; 1; 0). Вектора
будет иметь координаты (0; 1; 0). Вектора  принадлежат вертикальной плоскости (1), тогда нормаль этой плоскости
принадлежат вертикальной плоскости (1), тогда нормаль этой плоскости
n=A×B=(-sin α1; 0; cosα1).
Вектор с началом в точке ИП1 и с концом в произвольной точке M(x; h; y), принадлежащей плоскости (1), будет иметь координаты (x-x1; h-h1; y-y1). Здесь индекс «Г» опущен. Он ортогонален нормали плоскости n, поэтому их скалярное произведение равно нулю, т.е.
-sinα1(x-x1)+0(h-h1)+cosα1(y-y1)=-х·sinα1+y·cosα1+
+(x1sinα1-y1cosα1)=0.
Т.к. каноническое уравнение плоскости имеет вид:
Ax+By+Cz+D=0,
а в условиях решаемой задачи
Ax+Bh+Cy+D=0,
то
А=-sinα-1; В=0; C=cosα1; D=x1sinα1-y1cosα1.
Определим уравнение прямой, проходящей через ИП2 в направлении на летательный аппарат и задаваемой величинами α2 и ε2. Для этого рассмотрим единичный вектор С. Его проекции на оси ГСК равны (cosε2cosα2; sinε2; cosε2sinα2). Таким образом, уравнение искомой прямой запишется в виде:

Т.к. каноническое уравнение прямой имеет вид:
(x-a)/m=(y-b)/n=(z-c)/p,
где (а; b; с) - координаты точки, принадлежащей прямой;
(m; n; p) - координаты вектора, параллельного прямой, то в условиях решаемой задачи:
(x-a)/m=(h-b)/n=(y-c)/p=k,
где а=х2; b=h2; с=у2; m=cosε2cosα2; n=sinε2; p=cosε2sinα2.
Точка пресечения прямой и плоскости определяется следующим алгоритмом.
1. Определяется параметр k - коэффициент пропорциональности в уравнении прямой в пространстве
k=-(Aa+Bb+Cc+D)/(Am+Bn+Cp).
2. Определяются координаты точки пересечения прямой и плоскости
x=a+mk; y=b+nk; z=c+pk.
В условиях решаемой задачи
k=-(-x2sinα1+y2cosα1+x1sinα1-y1cosα1)/
(-cosε2cosα2sinα1+cosε2sinα2cosα1)=
=[(x2-x1)sinα1+(y1-y2)cosα1]/[cosε2sin(α2-α1)].
Окончательно
k=[(x2-x1)sinα1-(y2-y1)cosα1]/[cosε2sin(α2-α1)],
хЛА=x2+k·cosε2cosα2; hЛА=h2+k·sinε2; уЛА=y2+k·cosε2sinα2,
где (xГ; hГ; zГ) - координаты летательного аппарата в ГСК.
Справочная информация: sin(α-β)=sinα·cosβ-sinβ·cosα.
Для другого подобного сочетания измеряемых параметров (α1; ε1; α2) геометрия решения не изменяется, т.е. ищется пересечение плоскости и прямой.
Таким образом, способ определения пространственных координат летательных аппаратов на основе использования двух дирекционных углов и угла места позволяет определить точку на пересечении прямой и плоскости, что уменьшает время обработки полученной информации от датчиков, работающих в оптическом и радиолокационном диапазонах электромагнитных волн.
Источники информации
1. Панов В.П., Приходько В.В. Способ передачи и приема радиосигналов наземных радиомаяков. - ФИПС. Патент на изобретение №2436232, 10.12.2011 г.
2. Безяев B.C. Способ триангуляции целей. - ФИПС. Патент на изобретение №2423720, 10.07.2011 г.
3. Шишков С.В. Способ автоматизированного определения координат беспилотных летательных аппаратов. - ФИПС. Патент на изобретение №2523446, 26.05.2014 г.
Способ определения координат летательных аппаратов на основе использования двух дирекционных углов и одного угла места, заключающийся в приеме и формировании информации в пространственно разнесенных приемниках с одновременной регистрацией информации о летательных аппаратах и анализе ее на ЭВМ, отличающийся тем, что полученную информацию от двух разнесенных приемников обрабатывают на основе использования информации от двух дирекционных углов и угла места летательного аппарата, определяют коэффициент пропорциональности в уравнении прямой в пространстве k=[(x-x)sin α-(y-y)cos α]/[cos εsin(α-α)], и определяют координаты летательного аппарата в геодезической системе координат x=x+k·cos εcos α; h=h+k·sin ε; у=y+k·cos εsin α, что уменьшает время обработки полученной информации от датчиков, работающих в активном и пассивном режиме в оптическом и радиолокационном диапазонах электромагнитных волн.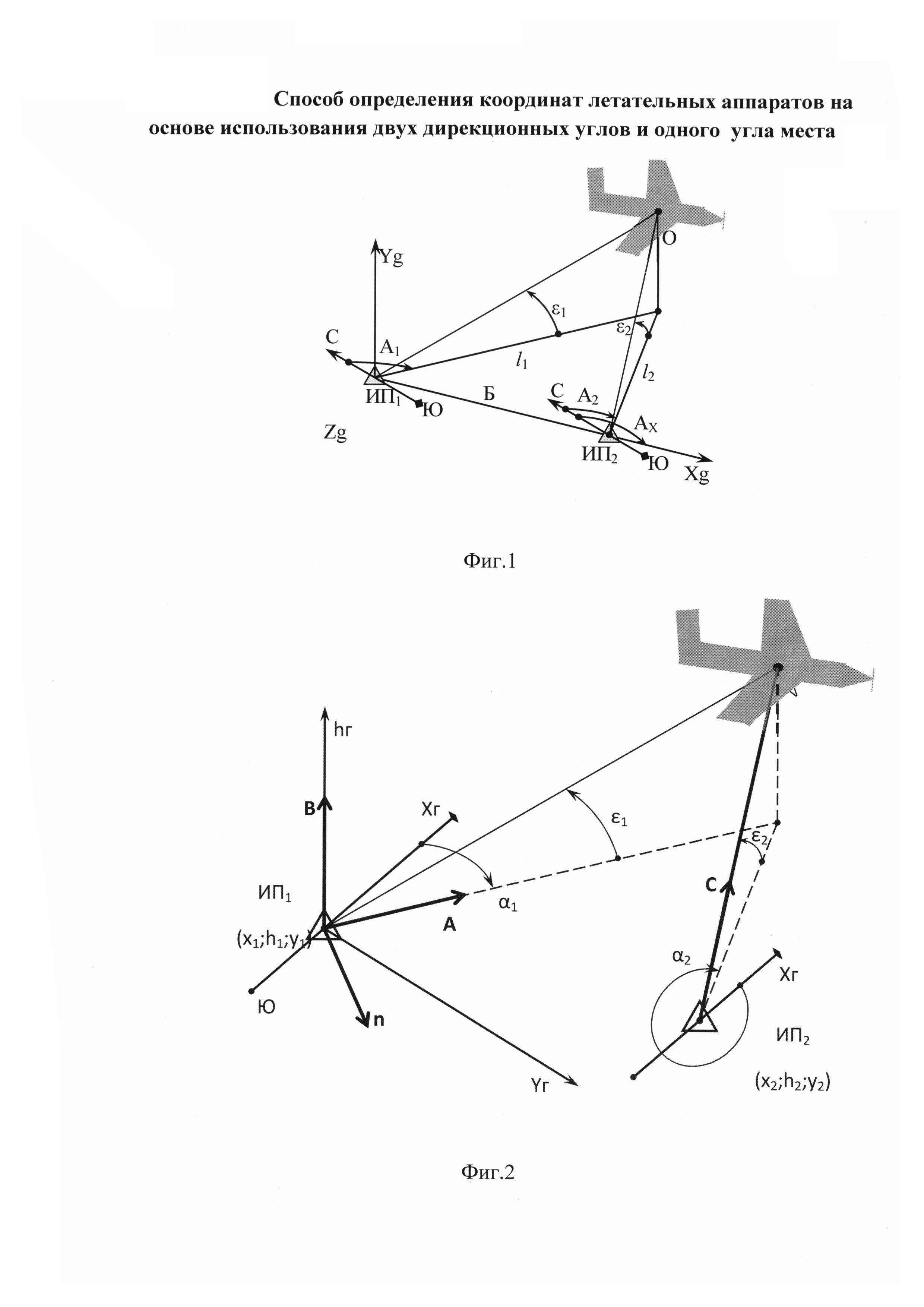
Способ автоматизированного определение координат беспилотных летательных аппаратов
Метод обнаружения малогабаритных беспилотных летательных аппаратов
Устройство подавления малогабаритных беспилотных летательных аппаратов
Способ захвата малогабаритных беспилотных летательных аппаратов
Способ голографической скрытности объектов от малогабаритных беспилотных летательных аппаратов
Метод поражения малогабаритных беспилотных летательных аппаратов
Способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов
Метод засветки оптико-электронных приборов малогабаритных беспилотных летательных аппаратов
Система управления комплексными методами борьбы с малогабаритными беспилотными летательными аппаратами
Способ определения координат летательных аппаратов с использованием одного дирекционного угла и двух углов места
Метод обнаружения малогабаритных беспилотных летательных аппаратов
Устройство подавления малогабаритных беспилотных летательных аппаратов
Способ захвата малогабаритных беспилотных летательных аппаратов
Способ голографической скрытности объектов от малогабаритных беспилотных летательных аппаратов
Метод поражения малогабаритных беспилотных летательных аппаратов
Способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов
Метод засветки оптико-электронных приборов малогабаритных беспилотных летательных аппаратов
Система управления комплексными методами борьбы с малогабаритными беспилотными летательными аппаратами
Способ определения координат летательных аппаратов с использованием одного дирекционного угла и двух углов места
Способ определения координат стреляющих артиллерийских систем и разрывов снарядов звукометрическим комплексом

