Результат интеллектуальной деятельности: ИДЕНТИФИКАЦИЯ КЛАСТЕРОВ ОРИЕНТАЦИИ ПО МИКРОСЕЙСМИЧЕСКИМ ДАННЫМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее описание изобретения относится к идентификации преобладающих ориентаций трещин по микросейсмическим данным. Микросейсмические данные часто получают в связи с гидравлическими разрывами пласта, применяемыми к подземной формации. Гидравлические разрывы пласта, как правило, используют чтобы вызвать образование искусственных трещин в подземной формации и, тем самым, повысить продуктивность подземного пласта при добыче углеводородов. Давления, создаваемые гидроразрывом, могут вызывать в подземном пласте сейсмические события малой амплитуды или малой энергии, данные о которых могут регистрироваться датчиками и накапливаться для анализа.
Сущность изобретения
[0002] В общем аспекте преобладающие ориентации трещин в подземной зоне идентифицируют по микросейсмическим данным.
[0003] В некоторых аспектах ориентация базовой плоскости определяется для каждого множества базовых плоскостей. Базовые плоскости определяют с помощью компланарных подмножеств данных о микросейсмических событиях (например, трех или нескольких микросейсмических событий), собранных при гидроразрыве пласта в подземной зоне. Количество вариантов ориентации базовых плоскостей в каждой из множества кластеров вычисляют. Преобладающую ориентацию трещин идентифицируют для подземной зоны на основании одного или нескольких установленных количеств.
[0004] Варианты осуществления могут содержать один или более из следующих признаков. Отображают гистограмму, при этом гистограмма указывает количество вариантов ориентации базовых плоскостей в каждом из кластеров. Установленное количество ориентаций базовых плоскостей может представлять собой значение вероятности, значение частоты, значение числа или другой тип значения.
[0005] Дополнительно или альтернативно, эти и другие варианты осуществления могут включать в себя один или более из следующих признаков. Каждая ориентация базовой плоскости содержит угол простирания и угол падения для одной из базовой плоскостей. Множество кластеров идентифицируют на основании ориентаций базовых плоскостей. Множество кластеров идентифицируют путем сортировки углов простирания, идентификации кластеров отсортированных углов простирания, сортировки углов падения, идентификации кластеров отсортированных углов падения и определения кластеров на основании кластеров отсортированных углов простирания и кластеров отсортированных углов падения.
[0006] Дополнительно или альтернативно, эти и другие варианты осуществления могут включать в себя один или более из следующих признаков. Множество кластеров представляет собой фиксированные значения, определенные независимо от ориентаций базовых плоскостей. Каждое компланарное подмножество микросейсмических событий идентифицируют по данным о микросейсмических событиях. Для базовой плоскости, определенной с помощью каждого компланарного подмножества, вычисляют нормальный вектор. На основании нормальных векторов вычисляют ориентации базовых плоскостей.
[0007] Дополнительно или альтернативно, эти и другие варианты осуществления могут включать в себя один или более из следующих признаков. Идентификация преобладающей ориентации трещины включает в себя идентификацию множества преобладающих ориентаций трещин. Идентификация множества преобладающих ориентаций трещин включает в себя идентификацию кластеров, содержащих наибольшие количества плоскостей трещин. Идентифицируют кластер микросейсмических событий, связанных с каждой из преобладающих ориентаций трещин. Преобладающую плоскость трещины для каждой преобладающей ориентации трещины генерируют на основании подбора (например, на основании оптимальности или по другому критерию) микросейсмических событий в кластере.
[0008] Детали одного или более вариантов осуществления настоящего изобретения приведены на прилагаемых чертежах и в нижеследующем описании. Другие признаки, цели и преимущества станут понятными из описания и чертежей, а также из формулы изобретения.
Краткое описание чертежей
[0009] На фиг. 1А представлена схема типовой системы скважин. На фиг. 1В представлена схема типовой вычислительной подсистемы 110, представленной на фиг. 1А.
[0010] На фиг. 2 представлен график, изображающий типовую гистограмму.
[0011] На фиг. 3А и 3В представлены графики, изображающие типовую ориентацию плоскости трещины.
[0012] На фиг. 4 показана блок-схема типового способа идентификации преобладающих ориентаций трещин.
[0013] На фиг. 5 показана блок-схема типового итерационного способа идентификации кластеров значений ориентации.
[0014] На фиг. 6 показана блок-схема типового динамического способа идентификации кластеров значений ориентации.
[0015] На фиг. 7 показана блок-схема типового способа обновления анализа согласно настоящему изобретению на основании новых микросейсмических данных.
[0016] Одинаковые номера позиций на различных чертежах указывают на одинаковые элементы.
Подробное раскрытие изобретения
[0017] В некоторых аспектах настоящего описания параметры трещины, преобладающие варианты пространственной ориентации трещины или другие данные идентифицируют по микросейсмическим данным. В некоторых случаях эти или другие типы данных идентифицируют в динамическом режиме, например в режиме реального времени в ходе гидроразрыва. Для многих применений и методов анализа необходима идентификация плоскостей трещин по микросейсмическим событиям в режиме реального времени, при этом конкретные плоскости трещин могут отображаться, показывая временную эволюцию и исключение по геометрическим параметрам, включая местоположение, распространение, рост, уменьшение или исключение плоскостей трещин. Такие функциональные возможности могут встраиваться в системы управления, программные и аппаратные средства и другие типы инструментов, находящихся в распоряжении инженеров нефтегазовых промыслов, когда они анализируют потенциальные нефтегазовые месторождения, стимулируя образование трещин гидроразрыва и анализируя полученные сигналы. Такие инструменты могут обеспечить надежный прямой интерфейс для представления и визуализации динамики гидроразрывных трещин, который может способствовать анализу сложности трещин, структуры системы трещин и формы месторождения. Эти инструменты могут использоваться при оценке эффективности гидравлического разрыва пласта, например, за счет улучшения, увеличения или оптимизации плотности расположения трещин гидроразрыва и длины и высоты трасс. Такие улучшения гидроразрыва, применяемые к пласту-коллектору, могут улучшить добычу углеводородов или других запасов из коллектора.
[0018] Гидравлические разрывы пласта могут применяться в любой подходящей подземной зоне. Гидравлические разрывы пласта часто применяют в плотных пластах с малопроницаемыми коллекторами, которые могут включать в себя, например, малопроницаемые традиционные нефтегазовые коллекторы, непрерывные залежи бассейнового типа и сланцевые газовые коллекторы, или другие типы пластов. Гидроразрыв может вызывать образование искусственных трещин в геологической среде, что позволяет повысить продуктивность коллектора при добыче углеводородов.
[0019] В ходе применения гидравлического разрыва пласта закачивание жидкостей под высоким давлением может изменять напряжения, способствовать накапливанию напряжений сдвига и вызывать другие эффекты в структурах геологической среды. В некоторых случаях микросейсмические события связаны с гидроразрывными трещинами, вызываемыми операциями гидроразрыва. Акустические волны или звуковые колебания, связанные с напряжениями и деформациями горных пород и образованием трещин, можно регистрировать и собирать их данные с помощью датчиков. В некоторых случаях микросейсмические события имеют низкую энергию (например, когда значение каротажных данных об интенсивности или моментальной магнитуде меньше трех), при этом с местоположениями событий связана некоторая неопределенность, либо систематическая ошибка или погрешность измерения. Неопределенность может быть описана, например, с помощью вытянутого сфероида, где наибольшая вероятность относится к центру сфероида, а наименьшая вероятность - к его краю.
[0020] Картирование микросейсмических событий можно использовать в целях определения геометрического местоположения точечного источника микросейсмических событий на основании зарегистрированных продольных и поперечных волн. Зарегистрированные продольные и поперечные волны (например, р-волны и s-волны) могут обеспечивать дополнительную информацию о микросейсмических событиях, включая местоположение точечного источника, местоположение события и неопределенность измерения положения, время возникновения события, моментальную магнитуду события, направление движения частиц и спектр излучения энергии, и возможно, также другие сведения. Микросейсмические события можно контролировать в режиме реального времени, а в некоторых случаях события также обрабатывают в режиме реального времени в ходе гидроразрыва. В некоторых случаях после гидроразрыва микросейсмические события, собранные при гидроразрыве, обрабатывают вместе в качестве «пост-данных».
[0021] Обработка данных о микросейсмических событиях, собранных в связи с гидроразрывом, может включать в себя установление соответствия между трещинами (называемое также картированием трещин). Процессы установления соответствия между трещинами позволяют идентифицировать плоскости трещин в любой зоне на основании данных о микросейсмических событиях, собранных в этой зоне. Некоторые типовые вычислительные алгоритмы для установления соответствия между трещинами используют данные о микросейсмических событиях (например, местоположение события, неопределенность измерения местоположения события, моментальная магнитуда события и т.д.) с целью идентификации отдельных трещин, соответствующих собранному множеству микросейсмических событий. Некоторые типовые вычислительные алгоритмы позволяют вычислять статистические свойства картины распространения трещин. Статистические свойства могут включать в себя, например, ориентацию трещин, тенденции ориентации трещин, размеры трещин (длину, высоту, площадь и т.д.), плотность расположения трещин, сложность трещин, свойства системы трещин и т.д. Некоторые вычислительные алгоритмы учитывают неопределенность местоположения событий, используя несколько вариантов реализации местоположений микросейсмических событий. Например, для заданного распределения вероятностей на сфероиде или другого типа распределения могут использоваться альтернативные варианты реализации статистических методов, связанные с методом Монте-Карло.
[0022] В целом, алгоритмы установления соответствия между трещинами могут обрабатывать данные в режиме реального времени, пост-данные или любую подходящую комбинацию этих и других типов данных. Некоторые вычислительные алгоритмы для установления соответствия между трещинами обрабатывают только пост-данные. Алгоритмы, обрабатывающие пост-данные, можно использовать, когда какое-либо подмножество или несколько подмножеств подлежащих обработке микросейсмических данных были собраны в связи с гидроразрывом; такие алгоритмы могут получать доступ (например, в качестве начального ввода данных) к полному подмножеству обрабатываемых микросейсмических событий. В некоторых вариантах осуществления алгоритмы для установления соответствия между трещинами обрабатывают данные в режиме реального времени. Такие алгоритмы можно использовать для автоматического установления соответствия между трещинами в режиме реального времени в ходе гидроразрыва. Алгоритмы, обрабатывающие данные в режиме реального времени, можно использовать во время гидроразрыва, причем такие алгоритмы могут адаптировать или обновлять в динамическом режиме ранее идентифицированную модель трещины, чтобы отразить вновь полученные данные о микросейсмических событиях. Например, после того как данные о микросейсмическом событии в связи с гидроразрывом на месторождении зарегистрированы и собраны, алгоритм автоматического установления соответствия между трещинами в режиме реального времени может реагировать на это новое событие, динамически идентифицируя и извлекая данные о плоскостях развития трещин по уже собранным микросейсмическим событиям в режиме реального времени. Некоторые вычислительные алгоритмы для установления соответствия между трещинами могут обрабатывать комбинацию пост-данных и данных в режиме реального времени.
[0023] Иногда алгоритмы картирования трещин выполнены с возможностью учета условий, возникающих при обработке микросейсмических данных в режиме реального времени. Например, несколько типов проблем или условий могут возникать, главным образом, в контексте реального времени. В некоторых случаях методы обработки в режиме реального времени можно адаптировать, чтобы учитывать (либо уменьшать или избегать) снижение точности, иногда связанное с трещинами, информацию о которых извлекают из наборов данных, не содержащих достаточного количества микросейсмических событий или не содержащих достаточного количества микросейсмических событий в некоторых частях пространственно-временной области. Некоторые методы обработки в режиме реального времени можно адаптировать для получения данных о трещинах, согласующихся с данными о трещинах, получаемыми с помощью методов обработки пост-данных. Например, некоторые из типовых методов обработки в режиме реального времени, раскрытых в настоящей заявке, согласно проверке статистической гипотезы (по t-критерию и F-критерию), дали результаты, статистически аналогичные результатам, полученным методами обработки пост-данных по тем же данным.
[0024] Иногда методы обработки в режиме реального времени можно адаптировать, чтобы без задержки (мгновенно, с точки зрения пользователя) предлагать пользователям данные об идентифицированных трещинах. Такие характеристики могут позволить промысловым инженерам или операторам в динамическом режиме получать информацию о геометрии трещин и регулировать параметры гидроразрыва при необходимости (например, улучшать, расширять, оптимизировать или иным образом изменять гидроразрыв). В некоторых случаях информацию о плоскостях развития трещины в динамическом режиме извлекают из микросейсмических данных и отображают для промысловых инженеров в режиме реального времени. Методы обработки в режиме реального времени могут обеспечивать высокую производительность. В некоторых случаях производительность можно повысить за счет технологии параллельных вычислений, технологии распределенных вычислений, методов параллельно-поточной обработки, алгоритмов быстрого двоичного поиска или сочетания этих и других аппаратных и программных решений, способствующих выполнению операций в режиме реального времени.
[0025] В некоторых вариантах осуществления технология установления соответствия между трещинами позволяет непосредственно представлять информацию о плоскостях развития трещин, связанную с трехмерными микросейсмическими событиями. Отображаемые плоскости трещин могут представлять системы трещин, имеющих несколько вариантов ориентации и активирующих сложные картины распространения трещин. В некоторых случаях параметры трещины гидроразрыва извлекают из облака данных о микросейсмических событиях; такие параметры могут включать в себя, например, тенденции ориентации трещин, плотность расположения трещин и сложность трещин. Информация о параметрах трещин может предоставляться промысловым инженерам или операторам, например, с помощью табличного, цифрового или графического интерфейса, или интерфейса, сочетающего табличные, цифровые и графические элементы. Графический интерфейс может быть представлен в режиме реального времени, при этом он может демонстрировать динамику трещин гидроразрыва в режиме реального времени. В некоторых случаях это помогает промысловым инженерам анализировать сложность трещин, систему трещин и форму месторождения, или позволяет им лучше понимать процесс гидроразрыва по мере его развития.
[0026] В некоторых вариантах осуществления доверительные значения точности используют для количественного выражения определенности информации о плоскостях развития трещин, извлекаемой из микросейсмических данных. Доверительные значения точности можно использовать для классификации трещин по уровням доверительной вероятности. Например, в некоторых контекстах подходят три уровня доверительной вероятности (низкий уровень доверительной вероятности, средний уровень доверительной вероятности и высокий уровень доверительной вероятности), тогда как в других контекстах целесообразно использовать другое количество (например, два, четыре, пять и т.д.) уровней доверительной вероятности. Доверительное значение точности плоскости развития трещины можно вычислить на основании любых подходящих данных. В некоторых вариантах осуществления доверительное значение точности для плоскости развития трещины вычисляют на основании местоположений микросейсмических событий и неопределенностей расположения, моментальной магнитуды отдельных микросейсмических событий, расстояний между отдельными событиями и их опорной плоскостью трещины, числа опорных событий, связанных с плоскостью трещины, и веса изменения ориентации трещины, помимо прочих данных.
[0027] Доверительные значения точности можно вычислять, а плоскости трещин классифицировать в любой подходящий момент времени. В некоторых случаях доверительные значения точности вычисляют, а плоскости трещин классифицируют в режиме реального времени в ходе гидроразрыва. Плоскости трещин можно представлять пользователю в любой подходящий момент времени и в любом подходящем формате. В некоторых случаях плоскости трещин представляют в графической форме с помощью пользовательского интерфейса в режиме реального времени в соответствии с доверительными значениями точности, в соответствии с уровнями доверительной вероятности точности или в соответствии с другим типом классификации. В некоторых случаях пользователь может выбирать отдельные группы или отдельные плоскости (например, с высокими уровнями доверительной вероятности) для просмотра или анализа. Плоскости трещин могут быть представлены пользователю в алгебраическом формате, цифровом формате, графическом формате, или с помощью сочетания этих и других форматов.
[0028] В некоторых вариантах осуществления микросейсмические события контролируют в режиме реального времени в ходе гидравлического разрыва пласта. По мере текущего мониторинга событий они могут также обрабатываться в режиме реального времени; помимо этого, они могут обрабатываться позднее в качестве пост-данных, или с использованием сочетания обработки в режиме реального времени и обработки пост-данных. События можно обрабатывать любым подходящим методом. Иногда события обрабатывают по отдельности, в тот момент времени и в том порядке, в котором они были получены. Например, состояние системы S(М, N-1) можно использовать, чтобы представить М плоскостей, сформированных по N-1 предыдущим событиям. Новое наступающее N-е событие может запустить систему S(M, N-1). В некоторых случаях, после получения N-го события, формируют гистограмму или распределение кластеров. Например, для идентификации допустимых преобладающих вариантов ориентации, встроенных во множества трещин, может быть сформирована гистограмма распределения вероятностей или гистограмма преобразования Хафа вырожденных плоскостей в области углов падения и углов простирания.
[0029] Базовая плоскость может быть сформирована по подмножеству микросейсмических событий. Например, любые три неколлинеарные точки в пространстве математически определяют базовую плоскость. Базовая плоскость, определяемая тремя неколлинеарными микросейсмическими событиями, может быть представлена нормальным вектором (а, b, с). Нормальный вектор (а, b, с) может быть вычислен на основании положения трех событий. Ориентация базовой плоскости может быть вычислена по нормальному вектору. Например, угол падения θ и угол простирания φ получают с помощью следующих выражений: S(M, N-1)

Угол падения θ плоскости трещины может представлять угол между плоскостью трещины и горизонтальной плоскостью (например, плоскостью xy). Угол простирания φ плоскости трещины может представлять угол между горизонтальной координатной осью (например, осью х) и горизонтальной линией, по которой плоскость трещины пересекает горизонтальную плоскость. Например, угол простирания может определяться относительно севера или другого горизонтального опорного направления. Плоскость трещины может определяться и другими параметрами, включая угловые параметры, отличные от угла падения и угла простирания.
[0030] В целом, N событий могут поддерживать Р базовых плоскостей, где Р=N(N-1)(N-2)/6, углы падения и простирания. Гистограмму вероятностей можно построить по углам ориентации. Гистограмма вероятностей или улучшенная гистограмма преобразования Хафа может иметь любую подходящую конфигурацию. Например, конфигурация гистограммы может быть основана на фиксированном размере бина и фиксированном количестве бинов, естественном оптимальном размере бина в области углов падения и углов простирания или других типах бинов. Гистограмма может быть основана на любом подходящем количестве микросейсмических событий (например, десятках, сотнях, тысячах и т.д.) и любом подходящем диапазоне ориентаций. В некоторых случаях для гистограммы определяют несколько дискретных бинов, при этом каждый бин представляет дискретный диапазон ориентаций. Количество базовых плоскостей в каждом дискретном диапазоне можно вычислить по базовым плоскостям. В некоторых случаях каждая ориентация базовой плоскости попадает в диапазон ориентаций, связанный с одним из бинов. Например, для N микросейсмических событий, каждую из Р базовых плоскостей можно присвоить какому-либо бину, при этом количество базовых плоскостей, присвоенных каждому бину, может быть вычислено. Количество, вычисляемое для каждого бина, может представлять собой любое подходящее значение. Например, это количество может быть ненормированным числом базовых плоскостей, нормированной вероятностью, частотой или частью базовых плоскостей, или количество может представлять собой любой тип значения, подходящий для гистограммы. Гистограмма может формироваться таким образом, чтобы представлять количество базовых плоскостей, присваиваемых всем бинам, или количество базовых плоскостей, присваиваемых подмножеству бинов.
[0031] В некоторых примерах гистограмма представлена в виде трехмерной столбчатой диаграммы, трехмерной карты поверхности или другого подходящего графика в соответствующей системе координат. Пики на графике гистограммы могут указывать преобладающие ориентации трещин. Например, вдоль одной оси гистограмма может представлять углы простирания от 0° до 360° (или в другом диапазоне), при этом углы простирания можно разделить на любое подходящее число бинов; вдоль другой оси гистограмма может представлять углы падения от 60° до 90° (или в другом диапазоне), при этом углы падения можно разделить на любое подходящее число бинов. Количественный параметр (например, вероятность) для каждого бина может быть представлен вдоль третьей оси на гистограмме. На итоговом графике могут быть представлены локальные максимумы (пики). Каждый локальный максимум (пик) может указывать соответствующий угол простирания и угол падения, представляющий преобладающую ориентацию трещин. Например, локальный максимум гистограммы может указывать на то, что вдоль этого направления (или диапазона направлений) располагается больше базовых плоскостей, чем вдоль соседнего направления, причем эти базовые плоскости или близко параллельны или по существу находятся в одной плоскости.
[0032] Диапазон ориентаций, представляемый каждым бином гистограммы, может определяться любым подходящим методом. В некоторых случаях каждый бин представляет заранее заданный диапазон ориентаций. Например, можно использовать способ бина с фиксированным размером. Иногда диапазон или размер каждого бина вычисляют на основании данных, представляемых гистограммой. Например, можно использовать способ бина с естественным оптимальным размером. В некоторых случаях сортируют ориентации базовых плоскостей и идентифицируют кластеры отсортированных ориентаций. Например, все углы простирания могут быть отсортированы в убывающем или возрастающем порядке, а затем сгруппированы в кластеры; аналогичным образом, углы падения могут быть отсортированы в убывающем или возрастающем порядке, а затем сгруппированы в кластеры. Кластеры могут быть связаны с двухмерной сеткой, при этом число базовых плоскостей в каждой ячейке сетки может быть подсчитано. В некоторых случаях этот метод позволяет генерировать адаптивные и динамические кластеры, обеспечивая получение высокоточных значений для преобладающих ориентаций. Данный способ и связанные с ним уточнения можно реализовать при сложности вычислений N3log(N). Иногда размеры бинов для угла простирания и угла падения являются фиксированными, при этом ячейку сетки для каждого местоположения базовой плоскости можно определить в явном виде по соответствующему углу простирания и углу падения при сложности вычислений N3.
[0033] Плоскости трещин, связанные с множеством микросейсмических событий, могут быть получены по преобладающим вариантам ориентации, встроенным в данные гистограмм. Базовые плоскости, поддерживающие преобладающую ориентацию (θ, φ), могут быть или почти параллельными, или находиться в одной плоскости. Базовые плоскости, находящиеся в одной плоскости, могут сливаться, образуя новую плоскость трещины с более прочной поддержкой (например, представляющую большее число микросейсмических событий). Для объединения плоскостей трещин можно использовать любой подходящий метод. В некоторых случаях, для каждой преобладающей ориентации (θ, φ), нормальный к плоскости вектор строится с помощью компонентов (sin θ cos φ, sin θ sin φ, cos θ). Иногда получаемые результаты нечувствительны к местоположению плоскости и, без потери общности, плоскость можно построить по этому нормальному вектору (например, предполагая, что начало координат находится в этой плоскости). Плоскость можно описать уравнением х sin θ cos φ + y sin θ sin φ + z cos θ = 0. Нормальное расстояние со знаком каждого события (х0, y0, z0) от базовой плоскости до построенной плоскости может быть представлено как d=-(х0 sin θ cos φ + y0 sin θ sin φ + x0 cos θ). В этом представлении события с противоположными знаками расстояния d расположены с противоположных сторон плоскости.
[0034] В некоторых случаях микросейсмические события группируют в кластеры исходя из их расстояния от построенных плоскостей трещин. Например, кластер событий может содержать группу событий, ближайших к построенной плоскости трещины. По существу, каждый кластер микросейсмических событий может поддерживать конкретную плоскость трещины. Термин «размер кластера» подразумевает число событий, которые содержит кластер. В некоторых случаях вводимые пользователем или другие программные данные могут указывать минимальное число событий в поддерживаемом кластере. Минимальный размер кластера может зависеть от числа микросейсмических событий в составе данных. В некоторых случаях минимальный размер кластера должен быть больше или равен трем. Например, кластеры, имеющие размер, больший или равный минимальному размеру кластера, могут рассматриваться в качестве допустимых плоскостей трещин. К местоположению и значениям неопределенности местоположения для событий в каждом кластере может применяться алгоритм подбора, чтобы найти соответствующую им плоскость трещины.
[0035] Для идентификации плоскости трещины по множеству микросейсмических событий можно использовать любой подходящий метод. Иногда используют метод подбора хи-квадрата. Если имеется K наблюдаемых микросейсмических событий, местоположения могут быть представлены как (xi, yi, zi), а неопределенности их измерения - как (σi,x, σi,y, σi,z), где 1≤i≤K. Параметры модели плоскости z=ах+by+с можно вычислить, например, путем минимизации оценочной функции хи-квадрат

Решение оценочной функции хи-квадрат может быть найдено любым подходящим методом. В некоторых случаях функция может быть получена путем решения трех уравнений, представляющих собой частные производные χ2(а, b, с) своих переменных, где каждая частная производная принудительно устанавливается в ноль. В некоторых случаях аналитического решения для этой нелинейной математической системы уравнений не существует. Чтобы найти решение относительно параметров a, b и с и вычислить углы падения и простирания (например, используя приведенное выше уравнение (1)), могут применяться численные методы (например, численный метод Ньютона, метод Ньютона-Рафсона, метод сопряженных градиентов или другой метод). Ориентация преобладающей плоскости трещины, вычисляемой по микросейсмическим событиям, может быть такой же или немного отличной от преобладающей ориентации трещины, определенной по гистограмме.
[0036] В некоторых вариантах осуществления алгоритм производит итерации по всем возможным преобладающим ориентациям с целью расширения всех допустимых плоскостей трещин. В некоторых случаях алгоритм производит итерации по выбранному подмножеству возможных преобладающих ориентаций. Итерации могут сходиться к плоскостям. Некоторые плоскости могут быть в точности равными друг другу, а некоторые - близкими друг к другу. Две плоскости могут считаться «близкими» друг к другу, например, когда среднее расстояние событий одной плоскости от другой плоскости меньше заданного порога. Пороговое расстояние может быть принято, например, за параметр управления. Алгоритм может осуществлять объединение близких плоскостей, а опорные события одной плоскости могут быть связаны с опорными событиям другой сливающейся плоскости (плоскостей).
[0037] В некоторых случаях на плоскости трещин, идентифицированные по микросейсмическим данным, накладывают ограничения. Например, иногда остаточное расстояние событий должно быть меньше, чем заданный допуск на расстояние. Допуск на расстояние может быть принят, например, за параметр контроля. В некоторых случаях идентифицированные плоскости трещин должны быть усечены надлежащим образом, чтобы представлять конечный размер трещин. Границу усеченных плоскостей можно вычислить по положению опорных событий и неопределенности измерения местоположения события. Новые плоскости трещин конечного размера могут сливаться с уже идентифицированными трещинами.
[0038] В некоторых случаях новое наступающее N-ное микросейсмическое событие связано с плоскостями трещин, уже идентифицированными на основании предыдущих N - 1 микросейсмических событий. Связав новое событие с существующей трещиной, можно использовать какой-то алгоритм для обновления существующей трещины. Например, обновление трещины может привести к изменению геометрии, местоположения, ориентации или других параметров трещины. Выбрав одну из ранее идентифицированных плоскостей трещины, можно вычислить расстояние плоскости трещины от нового события. Если это расстояние меньше или равно параметру контроля расстояния, новое событие можно добавить к множеству опорных событий для плоскости трещины. Если расстояние больше, чем параметр контроля расстояния, можно выбирать (например, итерационно или рекурсивно) другие ранее идентифицированные плоскости трещины, пока не будет найдена плоскость в пределах порогового расстояния. После добавления нового события к опорному множеству для плоскости трещины можно оценить и, при необходимости, пересчитать новые значения падения и простирания (например, используя метод подбора хи-квадрата или другой статистический или детерминистский прием вычислений) для плоскости трещины. Как правило, пересчет параметров трещины вызывает ограниченное изменение ориентации вследствие условного контроля расстояния.
[0039] Иногда, когда новое микросейсмическое событие связано с плоскостью трещины, один или несколько параметров (например, остаточное расстояние, площадь и т.д.) можно модифицировать или оптимизировать. Остаточное расстояние r плоскости может представлять среднее расстояние от опорных событий до плоскости. Если остаточное расстояние меньше, чем заданный допуск Т на остаточную величину, новое событие может быть помечено как относящееся к множеству связанных событий для этой плоскости. Иногда, когда остаточное расстояние r оказывается в пределах заданного допуска Т, запускают или останавливают дополнительный процесс, при помощи которого другие связанные события опорного множества исключают из списка. Площадь плоскости трещины может представлять размер плоскости трещины. Как показывает опыт, новое событие обычно заставляет плоскость трещины распространяться в длину, расти в высоту, или вызывает оба явления. Таким образом, вычислительные процессы можно ограничить условием неубывающей площади, в силу которого площадь новой плоскости должна возрастать или оставаться равной площади исходной плоскости (а не сокращаться), когда к плоскости добавляют новое событие.
[0040] Ориентация плоскости трещины может представлять собой угол плоскости трещины. Например, для представления ориентации плоскости трещины можно использовать нормальный вектор, углы падения и простирания или другие подходящие параметры. Изменение ориентации плоскости трещины (или другие изменения плоскости трещины) могут стать причиной перемещения некоторых связанных опорных событий из списка связанных событий в список несвязанных событий исходя из их расстояния от обновленной плоскости трещины. Дополнительно или альтернативно, изменение ориентации плоскости трещины может стать причиной присвоения плоскости трещины некоторых ранее несвязанных событий исходя из их близости к обновленной плоскости трещины. Дополнительно некоторые события, связанные с соседними плоскостями, могут также быть связаны с текущей плоскостью. Если новое событие связано с двумя плоскостями трещин, плоскости трещин могут пересекаться. В некоторых случаях пересекающиеся плоскости могут сливаться. Если новое событие не принадлежит к какой-либо существующей плоскости трещины, его можно отнести к списку «несвязанных событий».
[0041] Накопленные N микросейсмических событий в любой момент времени можно рассматривать в качестве подмножества множества событий на основании окончательных пост-данных. В некоторых случаях гистограмма или распределение ориентаций на основании первых N событий может отличаться от гистограммы или распределения ориентаций, построенных по окончательным пост-данным. Некоторые плоскости трещин, полученные по N микросейсмическим событиям, могут быть неточными, при этом такая неточность может снижаться с течением времени и по мере накопления новых событий. Так, например, точность и достоверность могут быть ниже в начальный момент времени, когда зарегистрированные плоскости трещин связаны с микросейсмическими событиями, расположенными близко от ствола скважины. Такие данные могут указывать на плоскости трещин, почти параллельные стволу скважины, даже если эти плоскости не представляют реальные трещины.
[0042] Доверительное значение точности определения трещины может использоваться в качестве критерия определенности, связанной с плоскостями трещин, идентифицированными по микросейсмическим данным. Иногда доверительное значение точности идентифицируют в режиме реального времени в ходе гидроразрыва. Доверительное значение точности можно определять по любым подходящим данным с помощью любых подходящих вычислений. Иногда на доверительное значение точности для плоскости трещины влияет число микросейсмических событий, связанных с плоскостью трещины. Так, доверительное значение точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) в зависимости от числа сейсмических событий в соответствии с какой-либо функцией. Число микросейсмических событий, связанных с плоскостью трещины, может быть включено (например, в качестве веса, экспоненты и т.д.) в уравнение для вычисления доверительного значения точности. Иногда плоскость трещины имеет более высокое доверительное значение (уровень достоверности), когда плоскость трещины поддерживается большим числом точек микросейсмических данных (или более низкое доверительное значение (уровень достоверности), когда плоскость трещины поддерживается меньшим числом точек микросейсмических данных).
[0043] Иногда на доверительное значение точности для плоскости трещины влияет неопределенность местоположения микросейсмических событий, связанных с плоскостью трещины. Так, доверительное значение точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) в зависимости от местоположения микросейсмического события в соответствии с какой-либо функцией. Неопределенность местоположения микросейсмического события может быть включена (например, в качестве веса, экспоненты и т.д.) в уравнение для вычисления доверительного значения точности. Иногда плоскость трещины имеет более высокое доверительное значение, когда плоскость трещины поддерживается точками микросейсмических данных, имеющих более низкую неопределенность (или более низкое доверительное значение, когда плоскость трещины поддерживается точками микросейсмических данных, имеющих более высокую неопределенность).
[0044] Иногда на доверительное значение точности для плоскости трещины влияет моментальная магнитуда микросейсмических событий, связанных с плоскостью трещины. Так, доверительное значение точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) в зависимости от моментальной магнитуды микросейсмического события в соответствии с какой-либо функцией. Моментальная магнитуда микросейсмического события может быть включена (например, в качестве веса, экспоненты и т.д.) в уравнение для вычисления доверительного значения точности. Моментальная магнитуда микросейсмического события может относиться к энергии или интенсивности (иногда пропорциональной квадрату амплитуды) события. Например, моментальная магнитуда микросейсмического события может представлять собой значение энергии или интенсивности на логарифмической шкале, или другой тип значения, представляющего энергию или интенсивность. Иногда плоскость трещины имеет более высокое доверительное значение, когда плоскость трещины поддерживается точками микросейсмических данных, имеющих более высокую интенсивность (или более низкое доверительное значение, когда плоскость трещины поддерживается точками микросейсмических данных, имеющих более низкую интенсивность).
[0045] Иногда на доверительное значение точности для плоскости трещины влияет расстояние между плоскостью трещины и микросейсмическими событиями, связанными с плоскостью трещины. Так, доверительное значение точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) в зависимости от среднего расстояния между плоскостью трещины и опорными микросейсмическими событиями, поддерживающими плоскость трещины. Среднее расстояние может быть включено (например, в качестве веса, экспоненты и т.д.) в уравнение для вычисления доверительного значения точности. Иногда плоскость трещины имеет более высокое доверительное значение, когда плоскость трещины поддерживается точками микросейсмических данных, которые, в среднем, находятся ближе к плоскости трещины (или более низкое доверительное значение, когда плоскость трещины поддерживается точками микросейсмических данных, которые, в среднем, находятся дальше от плоскости трещины).
[0046] Иногда на доверительное значение точности для плоскости трещины влияет ориентация плоскости трещины относительно преобладающей тенденции ориентации в множестве микросейсмических данных. Так, доверительное значение точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) в зависимости от угловой разности между ориентацией плоскости трещины и преобладающей тенденцией ориентации в микросейсмических данных. Углы ориентации могут включать в себя простирание, падение или любую подходящую комбинацию (например, трехмерный пространственный угол). Ориентация может быть включена (например, в качестве веса, экспоненты и т.д.) в уравнение для вычисления доверительного значения точности. Множество микросейсмических данных может иметь одну преобладающую тенденцию ориентации или несколько преобладающих тенденций ориентации. Преобладающие тенденции ориентации могут классифицироваться как первичная, вторичная и т.д. Иногда плоскость трещины имеет более высокое доверительное значение, когда плоскость трещины совпадает с преобладающей тенденцией ориентации в множестве микросейсмических данных (или более низкое доверительное значение, когда плоскость трещины отклоняется от преобладающей тенденции ориентации в множестве микросейсмических данных).
[0047] Весовое значение, называемое «вес изменения ориентации трещины», может представлять собой угловую разность между ориентацией плоскости трещины и преобладающей тенденцией ориентации в микросейсмических данных. Вес изменения ориентации трещины может быть скалярной величиной, принимающей максимальное значение, когда плоскость трещины совпадает с преобладающей тенденцией ориентации. Вес изменения ориентации трещины может принимать минимальное значение при ориентациях трещин, максимально отстоящих от преобладающей тенденции ориентации трещин. Например, когда существует единственная преобладающая тенденция ориентации трещин, вес изменения ориентации трещины может быть нулевым для трещин, перпендикулярных (или нормальных) к преобладающей ориентации трещин. В качестве другого примера, когда существуют несколько преобладающих тенденций ориентации трещин, вес изменения ориентации трещины может быть нулевым для трещин, имеющих ориентации между преобладающими ориентациями трещин. Вес изменения ориентации трещины может представлять собой отношение ориентации вычисленной плоскости и ориентации, отражаемой однородным случаем.
[0048] В некоторых случаях, когда существуют несколько преобладающих тенденций ориентации трещин, вес изменения ориентации трещины имеет одинаковое максимальное значение для каждой преобладающей тенденции ориентации трещин. В некоторых случаях, когда существуют несколько преобладающих ориентаций трещин, вес изменения ориентации трещины имеет различное локальное максимальное значение для каждой преобладающей тенденции ориентации трещин. Например, вес изменения ориентации трещины может составлять 1,0 для трещин, параллельных первой преобладающей тенденции ориентации трещин, 0,8 для трещин, параллельных второй преобладающей тенденции ориентации трещин, и 0,7 для трещин, параллельных третьей преобладающей тенденции ориентации трещин. Вес изменения ориентации трещины может уменьшаться до локальных минимумов между преобладающими тенденциями ориентации трещин. Например, вес изменения ориентации трещины между каждой соседней парой преобладающих ориентаций трещин может определять локальный минимум посередине между преобладающими ориентациями трещин или в другой точке между преобладающими ориентациями трещин.
[0049] На доверительное значение точности могут влиять неопределенность местоположения опорных микросейсмических событий, моментальная магнитуда опорных микросейсмических событий, расстояние между опорными микросейсмическими событиями и плоскостью трещины, число опорных событий, связанных с плоскостью, вес изменения ориентации трещины, другие величины или любая подходящая комбинация одной или нескольких из них. В некоторых общих моделях доверительное значение (достоверность) возрастает по мере увеличения моментальной магнитуды, по мере увеличения изменения ориентации трещины, по мере увеличения числа опорных событий, по мере увеличения точности их местоположения и по мере увеличения изменения веса как функции расстояния. Эти факторы можно использовать в качестве входных данных для задания веса в уравнении для доверительного значения точности. Например, в некоторых моделях веса являются линейными или нелинейными функциями этих факторов, при этом вес изменения ориентации трещины может представлять собой наибольшее значение веса, влияющего на доверительное значение плоскости. В некоторых примерах доверительное значение точности вычисляют по следующей формуле:
Для вычисления доверительного значения могут использоваться и другие уравнения или алгоритмы.
[0050] Идентифицированные плоскости трещин можно классифицировать по уровням доверительной вероятности на основании показателей доверительных значений плоскостей трещин. В некоторых случаях используют три уровня: низкий уровень доверительной вероятности, средний уровень доверительной вероятности и высокий уровень доверительной вероятности. Можно использовать любое подходящее число уровней доверительной вероятности. В некоторых примерах, когда к множеству опорных событий, связанных с существующей плоскостью трещины, добавляют новое событие, соответствующее доверительное значение трещины может возрастать, что может привести к переходу плоскости трещины с ее текущего уровня доверительной вероятности на более высокий уровень, если он существует. В качестве другого примера, в случае отклонения ориентации трещины от тенденций ориентации, демонстрируемых пост-данными о микросейсмических событиях, по мере постепенного накопления микросейсмических событий может происходить уменьшение доверительной вероятности трещины, главным образом, за счет веса изменения ориентации трещины, заставляющее плоскость опуститься на более низкий уровень доверительной вероятности, если он существует. Это в особенности может относиться к трещинам, созданным на начальном этапе гидравлического разрыва пласта; это может также относиться к другим типам трещин в других контекстах.
[0051] Пользователям (например, промысловым инженерам, инженерам по эксплуатации, аналитикам и другим) может предоставляться графическое отображение плоскостей трещин, идентифицированных по микросейсмическим данным. В некоторых случаях графическое отображение позволяет пользователю визуализировать идентифицированные плоскости в режиме реального времени на графических панелях, представляющих уровни доверительной вероятности. Например, чтобы по отдельности представлять низкий уровень доверительной вероятности, средний уровень доверительной вероятности и высокий уровень доверительной вероятности, можно использовать три графические панели. В некоторых случаях плоскости трещин с более низким уровнем доверительной вероятности создаются в начальные моменты времени гидроразрыва. В некоторых случаях плоскости трещин с более высоким уровнем доверительной вероятности распространяются с течением времени в направлении, почти перпендикулярном стволу скважины. По мере постепенного накопления новых микросейсмических событий с течением времени графическое отображение может обновляться, позволяя пользователям наблюдать в динамическом режиме за взаимосвязью плоскостей трещин с уровнями доверительной вероятности, связанными с графическими панелями.
[0052] Группы уровней доверительной вероятности могут быть представлены в качестве графиков плоскостей трещин или в другом формате. Группы уровней доверительной вероятности могут быть представлены в алгебраической форме, например, путем отображения алгебраических параметров (таких как параметры для уравнения плоскости) плоскостей трещин в каждой группе. Группы уровней доверительной вероятности могут быть представлены в числовом виде, например, путем отображения числовых параметров (таких как простирание, падение, площадь) плоскостей трещин в каждой группе. Группы уровней доверительной вероятности могут быть представлены в табличной форме, например, путем представления алгебраических параметров или числовых параметров плоскостей трещин в каждой группе. Кроме того, плоскость трещины можно изобразить графически в трехмерном пространстве, двухмерном пространстве или другом пространстве. Так, плоскость трещины может быть изображена в прямоугольной системе координат (например, координат х, y, z), в полярной системе координат (например, координат r, θ, φ) или другой системе координат. В некоторых примерах плоскость трещины может быть изображена в виде линии на пересечении плоскости трещины с другой плоскостью (например, линии на плоскости xy, линии на плоскости xz, линии на плоскости yz, или линии на любой произвольной плоскости или поверхности).
[0053] В некоторых случаях графическое отображение позволяет пользователям отслеживать и отображать пространственную и временную эволюцию конкретных плоскостей трещин, включая их формирование, распространение и рост. Так, пользователь может наблюдать стадии пространственной и временной эволюции конкретной плоскости трещины, например, идентифицируя первоначально плоскость трещины на основании трех микросейсмических событий, новое событие, изменяющее ориентацию плоскости, новое событие, вызывающее рост площади плоскостей (например, по вертикали, горизонтали или в обоих направлениях), или другие стадии эволюции плоскости трещины. Пространственная и временная эволюция плоскостей трещин может представлять пути перемещения возбуждающих жидкостей и расклинивающих агентов, закачиваемых в скелет горной породы. Визуальное отображение динамики плоскостей трещин может помочь пользователям лучше понять процесс гидравлического разрыва, точнее проанализировать сложность трещины, оценить эффективность гидроразрыва или улучшить эксплуатационные характеристики скважины.
[0054] Хотя в данной заявке описаны примеры, содержащие данные о микросейсмических событиях, методы и системы, раскрытые в данной заявке, можно применять и к другим типам данных. Например, раскрытые здесь методы и системы можно использовать для обработки множеств данных, включающих в себя элементы данных, не относящиеся к микросейсмическим событиям, которые могут содержать другие типы физических данных, связанные с подземной зоной. В некоторых аспектах настоящая заявка предлагает концепцию для обработки больших объемов данных, причем эта концепция может быть адаптирована к различным применениям, не рассматриваемым специально в данном описании. Например, раскрытые здесь методы и системы можно использовать для анализа пространственных координат, данных об ориентации или других типов информации, полученной из какого-либо источника. В качестве примера можно собирать образцы почв или пород (например, во время бурения) и определять концентрацию данного соединения (например, определенной «соли») как функцию местоположения. Это может помочь геофизикам и операторам оценивать геослои в грунте.
[0055] На фиг. 1А показано схематическое изображение типовой системы 100 скважин с вычислительной подсистемой 110. Типовая система 100 скважин включает в себя рабочую скважину 102 и наблюдательную скважину 104. Наблюдательная скважина 104 может находиться на расстоянии от рабочей скважины 102, вблизи от рабочей скважины 102 или в любом подходящем месте. Система 100 скважин может содержать одну или несколько дополнительных рабочих скважин, наблюдательных скважин или других типов скважин. Вычислительная подсистема 110 может содержать одно или несколько вычислительных устройств или систем, находящихся на рабочей скважине 102, на наблюдательной скважине 104 или в других местах. Вычислительная подсистема 110 или любые из ее компонентов могут размещаться отдельно от других компонентов, показанных на фиг. 1А. Например, вычислительная подсистема 110 может находиться в центре обработки данных, вычислительном центре или другом подходящем месте. Система 100 скважин может содержать дополнительные или другие элементы, при этом элементы системы скважин могут размещаться, как показано на фиг. 1А, или в любой другой подходящей конфигурации.
[0056] Типовая рабочая скважина 102 содержит ствол 101 скважины в подземной зоне 121 под поверхностью 106. Подземная зона 121 может содержать одну или меньше одной породной формации, или подземная зона 121 может содержать больше одной породной формации. В примере, показанном на фиг. 1А, подземная зона 121 содержит различные подповерхностные слои 122. Подповерхностные слои 122 могут определяться геологическими или другими свойствами подземной зоны 121. Например, каждый из подповерхностных слоев 122 может соответствовать конкретному литологического составу, конкретному характеру насыщенности, конкретному профилю напряжения или давления или любой другой подходящей характеристике. В некоторых случаях один или несколько подповерхностных слоев 122 могут представлять собой пласт-коллектор флюидов, содержащий углеводороды или другие типы флюидов. Подземная зона 121 может содержать любую подходящую породную формацию. Например, один или несколько подповерхностных слоев 122 могут содержать песчаник, карбонатные материалы, сланец, уголь, аргиллит, гранит или другие материалы.
[0057] Типовая рабочая скважина 102 содержит подсистему 120 обработки путем закачивания, включающую в себя автомобили 116 с приборами, автомобильные насосные установки 114 и другое оборудование. Подсистема 120 обработки путем закачивания может применять к подземной зоне 121 обработку с помощью закачивания через ствол 101 скважины. Обработка путем закачивания может представлять собой операцию гидроразрыва, формирующую трещины в подземной зоне 121. Например, обработка путем закачивания может инициировать, вызывать распространение или открытие трещин в одном или нескольких подповерхностных слоях 122. Операция гидроразрыва может включать в себя пробный мини-гидроразрыв, стандартный или полный гидроразрыв, последующий гидроразрыв, повторный гидроразрыв, заключительный гидроразрыв или другой тип гидравлического разрыва пласта.
[0058] При гидроразрыве жидкость для гидроразрыва можно закачивать в подземную зону 121 при любых подходящих давлениях жидкости и значениях расхода жидкости. Жидкости можно закачивать при давлениях, превышающих, равных или меньших, чем давление возникновения трещины, равных или меньших, чем давление закрытия трещины, или при любом подходящем сочетании этих и других давлений жидкости. Давление возникновения трещины для формации представляет собой минимальное давление закачивания жидкости, при котором в формации могут возникать или распространяться искусственные трещины. Применение гидроразрыва может приводить или не приводить к возникновению или распространению искусственных трещин в формации. Давление закрытия трещины для формации представляет собой минимальное давление закачивания жидкости, при котором в подземной формации могут расширяться существующие трещины. Применение гидроразрыва может приводить или не приводить к расширению естественных или искусственных трещин в формации.
[0059] Гидроразрыв может применяться любой подходящей системой с использованием любых подходящих технических средств. Автомобильные насосные установки 114 могут содержать передвижные транспортные средства, стационарные установки, салазки, шланги, трубы, емкости или резервуары для жидкости, насосы, клапаны, или другие подходящие конструкции и оборудование. Иногда автомобильные насосные установки 114 подключают к рабочей колонне, расположенной в стволе 101 скважины. Во время работы автомобильные насосные установки 114 могут закачивать жидкость через рабочую колонну в подземную зону 121. Закачиваемая жидкость может включать в себя жидкость для гидроразрыва без расклинивающих агентов, расклинивающие агенты, промывочную жидкость, присадки или другие материалы.
[0060] Гидроразрыв может применяться в единственном месте закачивания жидкости или в нескольких местах закачивания жидкости в подземную зону, при этом жидкость может закачиваться за один период времени или за несколько разных периодов времени. В некоторых случаях при гидроразрыве могут использоваться несколько различных мест для закачивания жидкости в один ствол скважины, несколько мест для закачивания жидкости в несколько разных стволов, или любая подходящая комбинация. Кроме того, жидкость при гидроразрыве может закачиваться через любой подходящий тип ствола скважины, например, через вертикальные, наклонные, горизонтальные, искривленные стволы, или через любую подходящую комбинацию этих и других стволов скважин.
[0061] Управлять гидроразрывом может любая подходящая система с использованием любых подходящих технических средств. Автомобили 116 с приборами могут содержать передвижные транспортные средства, стационарные установки или другие подходящие конструкции. Автомобили 116 с приборами могут содержать систему управления закачиванием, контролирующую и управляющую гидроразрывом, осуществляемым подсистемой 120 обработки путем закачивания. В некоторых вариантах осуществления система управления закачиванием может обмениваться данными с другим оборудованием в целях контроля и управления обработкой путем закачивания. Например, автомобили 116 с приборами могут обмениваться данными с автомобильными насосными установками 114, глубинными приборами и мониторинговым оборудованием.
[0062] Гидроразрыв, как и другие операции и естественные явления, может порождать микросейсмические события в подземной зоне 121, при этом в поземной зоне 121 могут быть собраны микросейсмические данные. Например, микросейсмические данные могут быть собраны одним или несколькими датчиками 112, связанными с наблюдательной скважиной 104, или другими типами систем. Микросейсмическая информация, зарегистрированная в системе 100 скважин, может включать в себя акустические сигналы, создаваемые естественными явлениями, акустические сигналы, связанные с гидроразрывом, применяемым в рабочей скважине 102, или другие типы сигналов. Например, датчики 112 могут регистрировать акустические сигналы, создаваемые скольжением пород, перемещениями пород, образованием трещин в породах или другими событиями в подземной зоне 121. В некоторых случаях местоположения отдельных микросейсмических событий можно определить на основании микросейсмических данных.
[0063] Микросейсмических события в подземной зоне 121 могут возникать, например, вдоль или вблизи от гидроразрывных трещин. Микросейсмических события могут быть связаны с уже существующими естественными трещинами или плоскостями гидроразрывных трещин, искусственно образованных в результате операций гидроразрыва. В некоторых средах большинство регистрируемых микросейсмических событий связаны с образованием трещин в горных породах под действием сдвига/скольжения. Такие события могут быть или не быть связанными с искусственно образованными гидроразрывными трещинами растяжения, имеющими значительную ширину. На ориентацию трещины может влиять режим напряжений, наличие систем трещин, образованных в разные моменты времени в прошлом (например, при такой же или другой ориентации напряжений). В некоторых средах более старые трещины могут оказаться полностью сцементированными в течение геологического времени и оставаться в виде плоскостей ослабления в скальных породах геологической среды.
[0064] Наблюдательная скважина 104, показанная на фиг. 1А, содержит ствол 111 скважины в подземной области под поверхностью 106. Наблюдательная скважина 104 содержит датчики 112 и другое оборудование, используемое для регистрации микросейсмической информации. В состав датчиков 112 могут входить геофоны или другие типы прослушивающих устройств. Датчики 112 могут располагаться в различных положениях в системе 100 скважин. На фиг. 1А датчики 112 установлены на поверхности 106 и под поверхностью 106 в стволе 111 скважины. Дополнительно или альтернативно, датчики могут размещаться в других местах над или под поверхностью 106, в других местах в стволе 111 скважины, или внутри другого ствола скважины. Наблюдательная скважина 104 может содержать дополнительное оборудование (например, рабочую колонну, пакеры, обсадную трубу или другое оборудование), не показанное на фиг. 1А. В некоторых вариантах осуществления микросейсмические данные регистрируются датчиками, установленными в рабочей скважине 102 или на поверхности 106, без использования наблюдательной скважины.
[0065] Иногда вся вычислительная подсистема 110 или ее часть может находиться в техническом центре управления на участке скважины, в центре обработки в реальном масштабе времени в удаленном пункте, в другом подходящем месте, или может применяться любая подходящая комбинация этих вариантов. Система 100 скважин и вычислительная подсистема 110 могут включать в себя или иметь доступ к любой подходящей информационно-коммуникационной инфраструктуре. Например, система 100 скважин может включать в себя несколько отдельных каналов связи или сеть взаимосоединенных каналов связи. Каналы связи могут содержать проводные или беспроводные системы связи. Например, датчики 112 могут осуществлять связь с автомобилями 116 с приборами или вычислительной подсистемой 110 с помощью проводных или беспроводных каналов или сетей, или автомобили 116 с приборами могут осуществлять связь с вычислительной подсистемой 110 с помощью проводных или беспроводных каналов или сетей. Каналы связи могут включать в себя сети общего пользования, частные сети передачи данных, спутниковые линии связи, выделенные информационные каналы, линии телекоммуникаций или любую подходящую комбинацию этих и других каналов связи.
[0066] Вычислительная подсистема 110 может анализировать микросейсмические данные, собранные в системе 100 скважин. Например, вычислительная подсистема 110 может анализировать данные о микросейсмических событиях, вызванных гидроразрывом подземной зоны 121. Микросейсмические данные, обусловленные гидроразрывом, могут содержать данные, собранные до, во время или после закачивания жидкости. Вычислительная подсистема 110 может принимать микросейсмические данные в любой подходящий момент времени. В некоторых случаях вычислительная подсистема 110 принимает микросейсмические данные в режиме реального времени (или практически в режиме реального времени) в ходе гидроразрыва. Например, микросейсмические данные могут быть переданы вычислительной подсистеме 110 немедленно после их регистрации датчиками 112. В некоторых случаях вычислительная подсистема 110 принимает все микросейсмические данные или их часть после завершения гидроразрыва. Вычислительная подсистема 110 может принимать микросейсмические данные в любом подходящем формате. Например, вычислительная подсистема 110 может принимать микросейсмические данные в формате, формируемом микросейсмическими датчиками или детекторами, или вычислительная подсистема 110 может принимать микросейсмические данные после того, как они были отформатированы, упакованы или иным образом обработаны. Вычислительная подсистема 110 может принимать микросейсмические данные с помощью любых подходящих средств. Например, вычислительная подсистема 110 может принимать микросейсмические данные по проводному или беспроводному каналу связи, проводной или беспроводной сети, или с одного или нескольких дисков или других материальных носителей данных.
[0067] Вычислительная подсистема 110 может использоваться для создания гистограммы на основании микросейсмических событий. Гистограмму можно использовать, например, для идентификации преобладающих ориентаций трещин в подземной зоне 121. На фиг. 2 показан пример гистограммы. Преобладающие ориентации трещин могут быть идентифицированы, например, на основании локальных максимумов в составе данных гистограммы. Преобладающие ориентации трещин могут соответствовать ориентациям семейств трещин в подземной зоне 121. В некоторых случаях микросейсмические данные, соответствующие каждой преобладающей ориентации трещин, используются для формирования одной или нескольких плоскостей трещин.
[0068] Некоторые из методов и операций, раскрытых в настоящей заявке, могут быть реализованы с помощью вычислительной подсистемы, выполненной с возможностью обеспечения описанных функциональных возможностей. В различных вариантах осуществления вычислительное устройство может содержать любые из различных типов устройств, включая, не ограничиваясь приведенным списком, системы персональных компьютеров, настольные компьютеры, переносные компьютеры, блокнотные компьютеры, универсальные вычислительные системы, карманные ПК, рабочие станции, планшетные компьютеры, серверы приложений, устройства хранения или любой другой тип вычислительных или электронных устройств.
[0069] На фиг. 1В представлена схема типовой вычислительной подсистемы 110, показанной на фиг. 1А. Типовая вычислительная подсистема 110 может находиться на или вблизи от одной или нескольких скважин системы 100 скважин или в удаленном пункте. Вся вычислительная подсистема 110 или ее часть может работать независимо от системы 100 скважин или независимо от любых других компонентов, показанных на фиг. 1А. Типовая вычислительная подсистема 110 содержит процессор 160, память 150 и контроллеры 170 ввода/вывода, соединенные с возможностью сообщения шиной 165. Память может содержать, например, оперативное запоминающее устройство ОЗУ (RAM), устройство хранения (например, перезаписываемое постоянное запоминающее устройство ПЗУ (ROM) или другие), жесткий диск или другой тип носителя информации. Вычислительную подсистему 110 можно предварительно запрограммировать, или программировать (и перепрограммировать), загружая программу из другого источника (например, с диска CD-ROM, с другого компьютерного устройства через сеть данных, или иным способом). Контроллер 170 ввода/вывода подключен к устройствам ввода/вывода (например, к монитору 175, мыши, клавиатуре или другим устройствам ввода/вывода) и к каналу 180 связи. Устройства ввода/вывода принимают и передают данные в аналоговой и цифровой форме по каналам связи, таким как последовательный канал, беспроводной канал (например, инфракрасный, радиочастотный или другие), параллельный канал или другой тип канала.
[0070] Канал 180 связи может содержать любой тип информационного канала, соединителя, сети передачи данных или другой тип канала. Например, канал 180 связи может содержать беспроводную или проводную сеть, локальную вычислительную сеть ЛВС (LAN), глобальную вычислительную сеть ГВС (WAN), частную сеть, сеть общего пользования (такую как Интернет), сеть WiFi, сеть, включающую в себя спутниковый канал, или другой тип сети передачи данных.
[0071] В памяти 150 могут храниться команды (например, программа в машинном коде), связанные с операционной системой, компьютерные приложения или другие ресурсы. В памяти 150 могут храниться также данные приложений и объекты данных, которые могут интерпретироваться одним или несколькими приложениями или виртуальными машинами, работающими на вычислительной подсистеме 110. Как показано на фиг. 1 В, типовая память 150 содержит микросейсмические данные 151, геологические данные 152, данные 153 о трещинах, другие данные 155 и прикладные программы 156. В некоторых вариантах осуществления память вычислительного устройства содержит дополнительную или другую информацию.
[0072] Микросейсмические данные 151 могут содержать информацию о микросейсмах (микросейсмических колебаниях) в подземной зоне. Например, микросейсмические данные могут содержать информацию, основанную на акустических данных, зарегистрированных на наблюдательной скважине 104, на поверхности 106, на рабочей скважине 102 или в других местах. Микросейсмические данные 151 могут содержать информацию, собранную датчиками 112. Иногда микросейсмические данные 151 объединяют с другими данными, переформатированными или обработанными иным образом. Данные о микросейсмических событиях могут содержать любую подходящую информацию, относящуюся к микросейсмическим событиям (местоположения, магнитуды, неопределенности, моменты времени и т.д.). Данные о микросейсмических событиях могут содержать данные, собранные в связи с одним или несколькими гидроразрывами, которые могут включать в себя данные, собранные до, во время или после закачивания жидкости.
[0073] Геологические данные 152 могут содержать информацию о геологических свойствах подземной зоны 121. Например, геологические данные 152 могут содержать информацию о подповерхностных слоях 122, информацию о стволах 101, 111 скважин, или информацию о других атрибутах подземной зоны 121. В некоторых случаях геологические данные 152 содержат информацию о литологическом составе, характере насыщенности, профиле напряжений, профиле давлений, пространственной протяженности или других атрибутах одной или нескольких породных формаций в подземной зоне. Геологические данные 152 могут содержать информацию, собранную по каротажным диаграммам, образцам пород, выходам пласта на поверхность, микросейсмическим построениям, или взятую из других источников данных.
[0074] Данные 153 о трещинах могут содержать информацию о плоскостях трещин в подземной зоне. Данные 153 о трещинах могут идентифицировать местоположения, размеры, формы и другие свойства трещин в модели подземной зоны. Данные 153 о трещинах могут содержать информацию о естественных трещинах, трещинах, вызванных гидроразрывом, или любом другом типе неоднородности в подземной зоне 121. Данные 153 о трещинах могут включать в себя плоскости трещин, вычисленные по микросейсмическим данным 151. Для каждой плоскости трещины данные 153 о трещинах могут содержать информацию (например, угол падения, угол простирания и т.д.), идентифицирующую ориентацию трещины, информацию, идентифицирующую форму (например, кривизну, апертуру и т.д.) трещины, информацию, идентифицирующую границы трещины, или любую другую подходящую информацию.
[0075] Прикладные программы 156 могут включать в себя программные приложения, командные сценарии, программы, функции, исполняемые файлы или другие модули, интерпретируемые или исполняемые процессором 160. Такие прикладные программы могут содержать машиночитаемые команды для выполнения одной или нескольких операций, представленных на фиг. 4. Прикладные программы 156 могут содержать машиночитаемые команды для формирования пользовательского интерфейса или графика, например, такого как гистограмма, представленная на фиг. 2. Прикладные программы 156 могут получать входные данные, такие как микросейсмические данные, геологические данные или другие типы входных данных, из памяти 150, из другого локального источника или из одного или нескольких удаленных источников (например, по каналу 180 связи). Прикладные программы 156 могут генерировать выходные данные и сохранять выходные данные в памяти 150, на другом локальном носителе данных, или на одном или нескольких удаленных устройствах (например, путем передачи выходных данных по каналу 180 связи).
[0076] Процессор 160 может исполнять команды, например, для создания выходных данных на основании входных данных. Например, процессор 160 может выполнять прикладные программы 156, исполняя или интерпретируя программные приложения, командные сценарии, программы, функции, исполняемые файлы или другие модули, содержащиеся в составе прикладных программ 156. Процессор 160 может выполнять одну или несколько операций, представленных на фиг. 4, или генерировать гистограмму, показанную на фиг. 2. Входные данные, принимаемые процессором 160, или выходные данные, генерируемые процессором 160, могут содержать микросейсмические данные 151, геологические данные 152, данные 153 о трещинах или другие данные 155.
[0077] На фиг. 2 показан график, изображающий типовую гистограмму 200. Типовая гистограмма 200, показанная на фиг. 2, представляет собой графическое изображение распределения ориентаций базовых плоскостей, идентифицированных по множеству микросейсмических данных. Гистограмма может также генерироваться на основании других типов данных и представлять другие типы информации.
[0078] Типовая гистограмма 200, показанная на фиг. 2, включает в себя график поверхности 206, представляющий вероятности ориентации плоскости трещины. Иногда гистограмма включает в себя другой тип графика. Например, гистограмма может передавать такую же или аналогичную информации с помощью столбчатого графика, топографического графика или другого типа графика. В примере, показанном на фиг. 2, каждая ориентация плоскости трещины представлена двумя переменными - углом простирания и углом падения. Гистограмму можно использовать, чтобы представлять распределение количественных значений по одной переменной, двум переменным, трем и большему числу переменных.
[0079] Поверхность 206, показанная на фиг. 2, построена в трехмерной системе координат. Некоторые типовые гистограммы построены в двух измерениях (например, для распределения по одной переменной), трех измерениях (например, для распределения по двум переменным) или четырех измерениях (например, для распределения по двум переменным в зависимости от времени). В примере, показанном на фиг. 2, трехмерная система координат представлена вертикальной осью 204а и двумя горизонтальными осями 204b и 204с. Горизонтальная ось 204b представляет диапазон углов падения, а горизонтальная ось 204с представляет диапазон углов простирания (в градусах). Вертикальная ось 204а представляет диапазон вероятностей.
[0080] Параметры гистограммы 200 можно вычислять, например, путем создания бинов, каждый из которых представляет четко выраженный диапазон ориентаций или кластер. Например, бин может представлять диапазон углов простирания и диапазон углов падения. На гистограмме 200, показанной на фиг. 2, каждый из бинов гистограммы соответствует пересечению поддиапазонов вдоль горизонтальных осей 204b и 204с.
[0081] Дополнительные параметры гистограммы 200 можно вычислять, например, путем вычисления количества ориентаций трещин, связанных с каждым бином. На гистограмме 200, показанной на фиг. 2, количество для каждого бина представлено уровнем поверхности 206 для каждого из кластеров, представленных на графике. Количества, представленные на фиг. 2, являются нормированными значениями вероятности. В общем случае количество для каждого бина на гистограмме может быть нормированной величиной или ненормированной величиной. Например, количество плоскостей трещин для каждого бина может представлять собой значение вероятности, значение частоты, значение целого числа или другой тип значения.
[0082] Количество плоскостей трещин для каждого бина гистограммы можно вычислить, например, путем присвоения каждой плоскости трещины какому-либо бину, подсчета числа плоскостей трещин, имеющих ориентацию в пределах диапазона, представленного каждым бином, или с помощью комбинации этих и других методов. В некоторых случаях плоскости трещин представляют собой базовые плоскости, определяемые точками микросейсмических данных, при этом каждая из базовых плоскостей определяет ориентацию, соответствующую одному из бинов.
[0083] Типовая гистограмма 200 представляет распределение вероятностей базовых плоскостей, связанных со 180 микросейсмическими событиями. В этом примере каждый бин представляет поддиапазон значений простирания в пределах диапазона простирания, указанного на гистограмме 200 (от 0° до 360°) и поддиапазон значений падения в пределах диапазона падения, указанного на гистограмме 200 (от 60° до 90°). Карта поверхности 206 демонстрирует несколько локальных максимумов (пиков), пять из которых помечены позициями 208а, 208b, 208с, 208d и 208е на фиг. 2.
[0084] Пики на гистограмме 200 представляют бины, связанные с большими количествами, чем окружающие бины. Бины, представленные пиками, соответствуют множеству плоскостей трещин, имеющих аналогичные или параллельные ориентации. В некоторых случаях каждый локальный максимум (или пик) на гистограмме можно рассматривать как соответствующий преобладающей (т.е. основной) тенденции ориентации. Тенденция ориентации может считаться преобладающей тенденцией ориентации, например, когда вдоль этого направления располагается больше базовых плоскостей, чем вдоль соседнего или близких направлений. Преобладающая ориентация трещины может представлять статистически значимое количество базовых плоскостей, которые являются параллельными, практически параллельными или находятся в одной плоскости.
[0085] Пример, показанный на фиг. 2, представляет собой гистограмму, основанную на двух угловых параметрах каждой базовой плоскости (т.е. углах простирания и падения). Гистограмма может быть основана и на других параметрах базовых плоскостей. Например, в состав данных гистограммы может быть включен третий параметр каждой базовой плоскости. Третий параметр может представлять собой, например, расстояние d базовой плоскости от начала координат. Гистограмма может быть создана для параметров, зависящих от расстояния, параметров, зависящих от ориентации, или их комбинаций. В некоторых примерах гистограмма может создаваться для значений dtan(θ) и dtan(φ) для каждой базовой плоскости на основании расстояния d каждой базовой плоскости от начала координат, угла φ простирания каждой базовой плоскости и угла 9 падения каждой базовой плоскости. Иногда двухмерная гистограмма может быть создана на основании двух любых независимых переменных, таких как, например, tan(θ), tan(φ), угол φ простирания, угол θ падения или других.
[0086] На фиг. 3А и 3В представлены графики, показывающие типовую ориентацию плоскости трещины. На фиг. 3А показан график 300а типовой базовой плоскости 310, определяемой тремя неколлинеарными микросейсмическими событиями 306а, 306b и 306с. На фиг. 3В показан график 300b нормального вектора 308 для базовой плоскости 310, представленной на фиг. 3А. На фиг. 3А и 3В вертикальная ось 304а представляет координату z, горизонтальная ось 304b представляет координату х, а горизонтальная ось 304с представляет координату y. Графики 300а и 300b представляют прямоугольную систему координат; могут использоваться и другие типы систем координат (например, сферическая, эллиптическая и т.д.).
[0087] Как показано на фиг. 3А, базовая плоскость 310 представляет собой двухмерную поверхность, проходящую через трехмерную систему координат xyz. Нормальный вектор 308 указывает ориентацию базовой плоскости 310. Нормальный вектор может представлять собой единичный вектор (вектор, имеющий единичную длину) или иметь неединичную длину.
[0088] Как показано на фиг. 3В, нормальный вектор 308 имеет составляющие (а, b, с) вектора. Составляющие (а, b, с) вектора можно вычислить, например, на основании положений микросейсмических событий 306а, 306b и 306с, на основании параметров базовой плоскости 310 или другой информации. На графике 300b составляющая х нормального вектора 308 представлена в виде отрезка а вдоль оси х, составляющая y нормального вектора 308 - в виде отрезка b вдоль оси y, а составляющая z нормального вектора 308 - в виде отрезка с вдоль оси z. (В показанном примере y-составляющая b представляет собой отрицательную величину).
[0089] Ориентация базовой плоскости 310 может быть вычислена по нормальному вектору 308, самим микросейсмическим событиям, параметрам базовой плоскости 310, другим данным или их комбинации. Например, угол θ падения и угол φ простирания базовой плоскости 310 можно вычислить по нормальному вектору 308 на основании следующих уравнений:

В некоторых случаях методы вычисления могут учитывать и должным образом управлять чувствительностью этих уравнений, например, когда параметр а или с очень мал.
[0090] В некоторых случаях ориентацию одной или нескольких базовых плоскостей можно использовать в качестве входных данных для создания данных гистограммы. Например, гистограмму ориентаций базовых плоскостей можно генерировать на основании множества базовых плоскостей. Иногда данные гистограммы генерируют путем присвоения каждой базовой плоскости бину на основании ориентации  базовой плоскости и вычисления количеств базовых плоскостей, связанных с каждым бином. В некоторых случаях выполняют построение гистограммы; данные гистограммы можно также использовать или обрабатывать без отображения гистограммы.
базовой плоскости и вычисления количеств базовых плоскостей, связанных с каждым бином. В некоторых случаях выполняют построение гистограммы; данные гистограммы можно также использовать или обрабатывать без отображения гистограммы.
[0091] На фиг. 4 показана блок-схема типового процесса 400 идентификации преобладающих ориентаций трещин. Некоторые или все операции процесса 400 могут быть реализованы одним или несколькими вычислительными устройствами. В некоторых вариантах осуществления процесс 400 может включать в себя дополнительные, не все из указанных или другие операции, выполняемые в том же или другом порядке. Кроме того, одна или несколько отдельных операций или подмножеств операций в процессе 400 могут выполняться изолированно или в других контекстах. Выходные данные, генерируемые процессом 400, включая выходные данные, генерируемые промежуточными операциями, могут содержать сохраняемую, отображаемую, распечатываемую, передаваемую, сообщаемую или обрабатываемую информацию.
[0092] В некоторых вариантах осуществления все или некоторых операции в процессе 400 выполняются в режиме реального времени в ходе гидроразрыва. Операция может быть выполнена в режиме реального времени, например, путем выполнения операции в результате приема данных (например, от датчика или системы мониторинга) без существенной задержки. Операция может быть выполнена в режиме реального времени, например, путем выполнения операции во время мониторинга наличия дополнительных микросейсмических данных, обусловленных гидроразрывом. Некоторые операции в режиме реального времени могут принимать входные данные и формировать выходные данные (результаты) во время гидроразрыва; при этом в некоторых случаях результаты могут предоставляться пользователю в пределах временного интервала, позволяющего пользователю реагировать на результаты, например, модифицируя процесс гидроразрыва.
[0093] Иногда все или некоторых операции в процессе 400 выполняются динамически в ходе гидроразрыва. Операция может быть выполнена динамически, например, путем итерационного или многократного осуществления операции на основании дополнительных входных данных по мере их предоставления. В некоторых случаях динамические операции выполняют в результате приема данных о новом микросейсмическом событии (или в результате приема данных о некотором количестве новых микросейсмических событий и т.д.).
[0094] На шаге 402 принимают микросейсмические данные, обусловленные гидроразрывом. Например, микросейсмические данные могут быть получены из памяти, от дистанционного устройства или из другого источника. Данные о микросейсмических событиях могут содержать информацию об измеренных местоположениях нескольких микросейсмических событий, информацию об измеренной магнитуде каждого микросейсмического события, информацию о неопределенности, связанной с каждым микросейсмическим событием, информацию о моменте времени, связанном с каждым микросейсмическим событием и т.д. Данные о микросейсмических событиях могут включать в себя микросейсмические данные, собранные на наблюдательной скважине, на рабочей скважине, на поверхности или в других местах в системе скважин. Микросейсмические данные по гидроразрыву могут содержать данные о микросейсмических событиях, собранные до, во время или после применения гидроразрыва. Например, в некоторых случаях микросейсмический мониторинг начинается до применения гидроразрыва, заканчивается после применения гидроразрыва, или начинается до и заканчивается после гидроразрыва.
[0095] На шаге 404 идентифицируют компланарные подмножества микросейсмических событий. Компланарное подмножество микросейсмических событий может содержать три или больше трех микросейсмических событий. Например, каждое подмножество может представлять собой триплет местоположений микросейсмических событий. В некоторых случаях компланарные подмножества идентифицируют путем идентификации всех триплетов в множестве данных о микросейсмических событиях. Например, для местоположений микросейсмических событий N можно идентифицировать триплетов. Иногда в качестве подмножеств идентифицируют не все триплеты. Так, некоторые триплеты (например, коллинеарные или практически коллинеарные триплеты) могут быть исключены.
[0096] На шаге 406 идентифицируют базовую плоскость для каждого компланарного подмножества микросейсмических событий. Например, базовую плоскость можно идентифицировать путем вычисления параметров базовой плоскости на основании триплета местоположений микросейсмических событий. В некоторых случаях плоскость может быть определена тремя параметрами, и модели базовой плоскости. Эти параметры можно вычислить на основании координат х, y и z трех неколлинеарных точек в подмножестве, например, путем решения системы линейных уравнений для трех параметров. Например, параметры плоскости, определяемой тремя неколлинеарными событиями (х1, y1, z1), (х2, y2, z2) и (х3, y3, z3), можно вычислить на основании решения следующей системы уравнений:
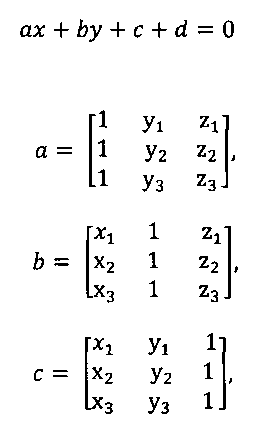
[0097] На шаге 408 вычисляют количество базовых плоскостей в каждом множестве диапазонов ориентации. Диапазоны ориентации определяются кластерами значений ориентации и могут соответствовать бинам гистограммы. В некоторых случаях бины совместно охватывают полный диапазон ориентаций базовых плоскостей, при этом каждый отдельный бин соответствует телесному углу в трехмерном пространстве. Телесный угол может определяться, например, диапазоном углов падения и диапазоном углов простирания, или угловыми диапазонами, основанными на комбинациях угла простирания и угла падения.
[0098] Количество базовых плоскостей в каждом бине можно вычислить, например, путем идентификации ориентации каждой базовой плоскости и определения бина, в котором находится ориентация каждой базовой плоскости. Иногда нормальные векторы вычисляют для всех базовых плоскостей, а ориентации базовых плоскостей вычисляют по нормальным векторам. В некоторых случаях ориентация каждой базовой плоскости содержит угол простирания и угол падения для одной из базовой плоскостей. Например, ориентации базовых плоскостей можно вычислять, используя приведенное выше уравнение 1. Для вычисления ориентации базовой плоскости можно применять и другие методы.
[0099] В некоторых вариантах осуществления диапазоны ориентаций для каждого бина представляют собой предварительно вычисленные значения. Например, бины можно определять независимо от ориентаций базовых плоскостей. В некоторых вариантах осуществления бины определяют на основании ориентаций базовых плоскостей, идентифицированных на шаге 406. Например, как показано на фиг. 4, значения ориентаций базовых плоскостей могут быть отсортированы на шаге 408, а бины могут быть идентифицированы по отсортированным значениям ориентаций базовых плоскостей на шаге 410 (например, с использованием какой-либо методологии образования кластеров, схем «ближайшего соседа» и т.д.).
[0100] В некоторых случаях бины идентифицируют по кластеризованным множествам значений ориентации. Например, бины можно идентифицировать путем сортировки углов простирания, идентификации кластеров отсортированных углов простирания, сортировки углов падения, идентификации кластеров отсортированных углов падения и определения бинов на основании кластеров отсортированных углов простирания и кластеров отсортированных углов падения.
[0101] Кластеры можно определить по значениям ориентаций базовых плоскостей с помощью ряда различных способов. На фиг. 5, более подробно обсуждаемой ниже, представлен пример итерационного способа идентификации кластеров значений ориентаций. На фиг. 6, более подробно обсуждаемой ниже, представлен пример динамического способа идентификации кластеров значений ориентаций. Кластеры можно также определять по значениям ориентаций базовых плоскостей с помощью других способов.
[0102] На шаге 412 вычисляют количество базовых плоскостей в каждом бине. Количество вариантов ориентации базовых плоскостей может представлять собой значение вероятности, значение частоты, целое число плоскостей или другой тип значения. Например, количество базовых плоскостей в данном кластере может представлять собой число базовых плоскостей, имеющих ориентацию, связанную с данным кластером. В другом примере количество базовых плоскостей в данном кластере может представлять собой число базовых плоскостей, имеющих ориентацию, связанную с данным диапазоном ориентаций, разделенное на общее число идентифицированных базовых плоскостей. Количества могут быть нормированы, например, таким образом, чтобы сумма количеств равнялись единице (или другой нормированной величине). Примеры методов идентификации количеств раскрыты в настоящем описании, например, в разделах, озаглавленных «Идентификация кластеров ориентации по микросейсмическим данным» и «Обновление данных гистограммы».
[0103] На шаге 414 преобладающие ориентации трещин идентифицируют по количествам, вычисленным на шаге 412. Преобладающие ориентации трещин можно идентифицировать, например, в качестве кластеров, имеющих более высокие локальные максимумы ориентаций базовых плоскостей. В некоторых случаях преобладающие ориентации трещин идентифицируют на основании локальных максимумов в составе данных гистограммы, генерируемой по этим количествам. Может быть идентифицирована единственная преобладающая ориентация трещин или несколько преобладающих ориентаций трещин. В некоторых случаях преобладающую ориентацию трещин идентифицируют на основании высоты, ширины и других параметров пика в составе данных гистограммы. Преобладающую ориентацию трещин можно идентифицировать в качестве центральной точки кластера, вычислить в качестве средней ориентации базовых плоскостей в кластере, или вычислить иным способом.
[0104] Преобладающая ориентация трещин, идентифицированная по количествам, вычисленным на шаге 412, может представлять собой ориентацию физических трещин в пределах подземной зоны. В некоторых породных формациях трещины, как правило, образуются в виде множеств (или семейств), имеющих параллельные или аналогичные ориентации. Некоторые формации содержат несколько множеств трещин. Например, формация может содержать первое множество трещин, имеющих первичную ориентацию, которая может быть обусловлена направлением максимального напряжения. Формация может содержать второе множество трещин имеющих вторичную ориентацию, отличную от первичной. Вторичная ориентация может отстоять от первичной ориентации, например, на девяносто градусов или другой угол. Иногда каждая из преобладающих ориентаций трещин соответствует ориентации множества трещин в подземной зоне.
[0105] В некоторых случаях преобладающую ориентацию трещин идентифицируют в соответствии с алгоритмом или методом, позволяющим получить предпочтительную ориентацию, например, на основании физических свойств или любой другой информации. Алгоритм позволяет определять, насколько строго данные указывают на доминирование этой ориентации (например, на основании доверительного значения (уровня достоверности) между 0 и 1), а также принимать во внимание эту информацию, генерируя различные тенденции первичной ориентации.
[0106] На шаге 416 отображают гистограмму значений ориентации базовых плоскостей. Гистограмма указывает количество ориентаций базовых плоскостей в каждом из кластеров. Пример гистограммы показан на фиг. 2. Количества могут отображаться в другом формате или в виде гистограммы другого типа. Гистограмму можно построить, например, в двух или трех измерениях. Иногда гистограмму строят как непрерывную линию или поверхность, как массив дискретных глифов (например, столбчатую диаграмму), как топографические области, или с помощью другого типа графического представления. В дополнение к отображению гистограммы, или в качестве альтернативы отображению гистограммы, значения ориентации базовых плоскостей могут быть представлены в виде числовых значений, алгебраических значений, числовой таблицы или в другом формате.
[0107] На шаге 418 генерируют плоскости трещин. Плоскости трещин могут генерироваться, например, на основании точек микросейсмических данных и преобладающих ориентаций трещин, идентифицированных на шаге 414. В некоторых случаях идентифицируют кластер микросейсмических событий, связанный с каждой из преобладающих ориентаций трещин, и генерируют плоскость трещины по каждому кластеру. Иногда плоскости трещин идентифицируют на основании местоположений и других параметров измеренных микросейсмических событий. Например, трещину можно генерировать, подбирая отдельные кластеры микросейсмических событий для плоскости. Для создания плоскости трещины можно применять и другие методы. Примеры методов создания плоскостей трещин по микросейсмическим данным раскрыты в настоящем описании, например, в разделах, озаглавленных «Анализ микросейсмических данных по гидроразрыву», «Управление микросейсмическими данными для установления соответствия между трещинами», «Идентификация плоскостей трещин по микросейсмическим данным» и «Распространение обновлений плоскостей трещин».
[0108] В некоторых случаях алгоритм может получать входные данные из внешнего источника (например, от пользователя, от других физических агентов и т.д.). Внешние входные данные могут содержать информацию, например, о том, что данная ориентация, вероятно, является первичной ориентацией (и, таким образом, содержит предварительно заданный тег достоверности), о том, что данная ориентация с меньшей вероятностью обеспечивает плоскости в этом направлении (и, таким образом, имеет очень небольшой, или даже нулевой уровень доверительной вероятности (достоверности)). Такие типы входных данных могут вносить смещение в вычисление плоскостей, включенных в множество микросейсмических данных, чтобы отразить эти предпочтения.
[0109] В некоторых случаях гистограмма отображается в режиме реального времени в ходе гидроразрыва, при этом гистограмма может обновляться динамически по мере регистрации дополнительных микросейсмических событий. Например, каждый раз при получении нового микросейсмического события могут идентифицироваться дополнительные базовые плоскости и, соответственно, обновляться количество базовых плоскостей в каждом кластере. Иногда кластеры также обновляются динамически по мере приема микросейсмических данных. Примеры методов обновления гистограммы на основании дополнительных микросейсмических данных раскрыты в настоящем описании, например, в разделе, озаглавленном «Обновление данных гистограммы».
[0110] В некоторых случаях плоскости трещин обновляют в режиме реального времени, например, в результате получения микросейсмических данных. Примеры методов обновления плоскостей трещин по микросейсмическим данным раскрыты в настоящем описании, например, в разделах, озаглавленных «Анализ микросейсмических данных по гидроразрыву», «Управление микросейсмическими данными для установления соответствия между трещинами», «Идентификация плоскостей трещин по микросейсмическим данным» и «Распространение обновлений плоскостей трещин». В некоторых случаях уровень доверительной вероятности для каждой плоскости трещины можно модифицировать (например, увеличить, уменьшить) на основании новых микросейсмических данных. Иногда на основании новых микросейсмических данных можно создать новую плоскость трещины или исключить ранее сформированную плоскость трещины.
[0111] Обратимся теперь к фиг. 5 и 6, как обсуждалось выше. На фиг. 5 представлен пример итерационного способа идентификации кластеров значений ориентации, а на фиг. 6 представлен пример динамического способа идентификации кластеров значений ориентации. Существуют и другие примеры. Однако оба типовых способа, раскрытых в настоящей заявке, являются адаптивными в том отношении, что число и диапазоны ориентации кластеров не заданы заранее. Число и диапазоны ориентации скорее определяют по мере установления связи значений ориентации с кластерами исходя из степени изменения самих значений ориентации, при этом число и диапазоны ориентации всех кластеров не определяют до тех пор, пока все кластеризуемые значения ориентации не будут присвоены тому или иному кластеру. Поскольку способы являются адаптивными, диапазоны ориентации кластеров необязательно должны быть равномерными, при этом, как правило, некоторые кластеры имеют диапазоны ориентации, отличные от других. Иногда адаптивный характер способа позволяет автоматически регулировать число и диапазоны ориентации кластеров, что помогает отразить основные тенденции и характеристики данных.
[0112] Прежде всего, нет необходимости обрабатывать и кластеризовать все значения ориентации, определенные по всему множеству микросейсмических данных. Вместо этого, можно обработать подмножество данных и кластеризовать его значения ориентации. Подмножество, представляющее собой случайную выборку данных, может обеспечивать точное или достаточно точное представление всего множества данных. Таким образом, при наличии большого множества данных, обработка случайного подмножества данных позволяет обеспечить решение (т.е. кластеры) за более короткий промежуток времени и при меньшем объеме обработки по сравнению с обработкой всего множества данных. Обработка подмножества данных позволяет сначала обеспечить предварительный просмотр решения на основании этого подмножества, пока обрабатывается все множество данных. В некоторых случаях можно обрабатывать несколько подмножеств данных с помощью одного или обоих типовых способов, приведенных в настоящем описании. Поскольку сходные множества данных, обрабатываемые с помощью типовых способов, приведенных в настоящем описании, дают конгруэнтные решения (т.е. кластеры), решения по нескольким подмножествам данных, например, случайным неперекрывающимся подмножествам одного супермножества, можно объединять для получения решения на основании большего множества данных. Обработка и последующее объединение решений по нескольким подмножествам данных может способствовать параллельной обработке данных. Например, подмножество данных или все множество данных можно разбить на некоторое число подмножеств, соответствующих числу процессоров, компьютеров или параллельных потоков. Каждый процессор, компьютер или параллельный поток может формировать собственные кластеры значений ориентации параллельно и за меньшее время, чем потребовалось бы для обработки такого же объема данных при такой же скорости в едином потоке. Таким образом, кластеры по каждому из параллельных процессов можно комбинировать для получения единого решения.
[0113] Представленный на фиг. 5 итерационный способ является итерационным в том смысле, что число и значения ориентации определяют итерационно, путем многократного объединения и разбиения первоначального множества кластеров исходя из степени изменения в кластерах. Поскольку процесс является итеративным, число кластеров и диапазон ориентаций, связанных с каждым кластером, не определяют до тех пор, пока не прекратятся итерации, например, когда число кластеров стабилизируется (например, при оптимальном или почти оптимальном решении) или в какой-либо другой точке остановки. Кроме того, итерации могут приводить к решению, при котором различные кластеры имеют различные диапазоны ориентаций (т.е. не все кластеры находятся в одном угловом диапазоне). В некоторых случаях итерации могут сходиться к оптимальному множеству кластеров, при этом каждая итерация последовательно улучшает кластеры. Примечательно, что хотя, как обсуждалось выше, значения ориентации сначала подвергаются сортировке (на шаге 408, ФИГ. 4), при итерационном способе сортировать значения ориентации необязательно, поэтому данная операция может быть опущена. Итерационный способ, выполняемый на основании отсортированных или неотсортированных данных, позволяет достичь одного и того же статистического решения (т.е. аналогичных кластеров), однако при выполнении способа на основании неотсортированных данных для достижения решения могут потребоваться дополнительные итерации. В некоторых случаях может оказаться быстрее выполнить итерационный способ на основании неотсортированных данных, чем отсортировать данные, а затем приступить к выполнению итерационного способа.
[0114] Для этого на шаге 502 образуют множество кластеров путем первоначального установления связи каждого из значений ориентации с тем или иным кластером. Метод первоначальной кластеризации значений ориентации выбирают для того, чтобы получить некоторое число кластеров, которые можно обрабатывать в управляемом режиме. В некоторых случаях метод первоначальной кластеризации значений ориентации выбирают для получения небольшого количества кластеров, например, от 3 до 5. Однако могут быть получены и другие количества первоначальных кластеров.
[0115] В некоторых случаях кластеры могут быть определены на основании фиксированного, заданного максимального диапазона ориентаций. Существует ряд различных методов реализации фиксированных диапазонов угловой ориентации, которые можно использовать. Однако в одном из примеров полный угловой диапазон значений ориентации или возможных значений ориентации в множестве данных равномерно делят на равные угловые диапазоны, каждый из которых соответствует бину. После этого значения ориентации связывают с бинами и таким образом кластеризуют в зависимости от того, попадает ли значение в угловой диапазон того или иного бина.
[0116] В некоторых случаях каждый из кластеров может иметь фиксированный заданный максимальный диапазон, определенный по угловой разности, измеренной между соседними значениями ориентации, связанными с одним и тем же кластером. Например, новое значение ориентации связано с кластером, если наименьшее угловое расстояние между данным значением ориентации и любым другим значением ориентации в кластере (т.е. соседним значением ориентации) меньше, чем заданная максимальная угловая разность. Угловую разность можно охарактеризовать как пороговое значение. Если значение ориентации нельзя связать с существующим кластером, создают новый кластер. Процесс повторяют для каждого анализируемого значения ориентации, пока все значения ориентации в множестве не будут связаны с кластером.
[0117] В некоторых случаях кластеры могут иметь заданный максимальный диапазон, изменяемый и определяемый по характеристике значений ориентации или кластеров. Так, диапазон можно определить исходя из степени изменения значений ориентации, например, в виде функции среднеквадратичного отклонения, углового охвата значений ориентации, или другого количественного показателя изменения. Существует ряд различных методов реализации переменных диапазонов, которые можно использовать. Однако в одном примере пороговый угловой охват (Т) составляет

где dmin представляет собой наименьшее угловое расстояние между соседними значениями ориентации в определяемом кластере, dmax - наибольшее угловое расстояние между соседними значениями ориентации в определяемом кластере, при этом α=1-ехр(-γ*σ/µ), где γ - влияющий фактор, σ - среднеквадратичное отклонение углового расстояния между соседними значениями ориентации в формируемом кластере, а µ - среднее значений ориентации в формируемом кластере. В некоторых случаях у находится в интервале между 0,5 и 1. Существуют и другие примеры переменных угловых диапазонов.
[0118] После того, как некоторые или все значения ориентации будут связаны с кластерами, анализируют степень изменения в парах соседних кластеров, чтобы определить, сохранить ли кластер или осуществить переоценку кластеров. На шаге 504 анализируют пару соседних кластеров. Если в соседних кластерах обнаружена высокая степень изменения (т.е. превышающая заданную величину изменения), на шаге 508 происходит объединение кластеров. Если степень изменения невысока, на шаге 506 можно сохранить один из кластеров и, как обсуждается ниже, на шаге 504 выполняется анализ другого кластера и кластера, расположенного рядом с ним.
[0119] Степень изменения в кластере можно вычислить как функцию среднеквадратичного отклонения, угловой охват значений ориентации, или другой количественный показатель изменения. В одном примере степень изменения в кластере характеризуется характеристическим числом (С), где

или

где m - число значений ориентации в кластере, σ - среднеквадратичное отклонение углового расстояния между соседними значениями ориентации в кластере, а µ - среднее значений ориентации в кластере. Таким образом, два соседних кластера сливаются, если оба имеют значение С, превышающее заданное значение объединения.
[0120] На шаге 510 анализируют степень изменения в объединенном кластере, чтобы определить, следует ли сохранить объединенный кластер, или разбить его, используя другой заданный максимальный диапазон. Если степень изменения в объединенном кластере высока (например, превышает заданную величину изменения), на шаге 512 значения ориентации в объединенном кластере заново связывают с двумя новыми кластерами, используя другой заданный максимальный диапазон. Если степень изменения невысока, на шаге 506 объединенный кластер сохраняют. Как указано выше, степень изменения в объединенном кластере можно вычислить как функцию среднеквадратичного отклонения, угловой охват значений ориентации, или по другому количественному показателю изменения. В одном примере степень изменения характеризуется характеристическим числом (С), а объединенный кластер разбивают, если значение С больше, чем заданное значение разбиения.
[0121] Другой заданный максимальный диапазон, используемый для разбиения ранее определенного кластера, может быть основан на степени изменения значений ориентации в кластере или в других кластерах. Как указано выше, степень изменения в объединенном кластере можно вычислить как функцию среднеквадратичного отклонения, угловой охват значений ориентации, или по другому количественному показателю изменения. В одном примере заданный пороговый угловой охват, такой как

можно использовать для установления связи значений ориентации с кластерами. В другом примере заданный пороговый угловой охват может составлять

где max(d) - наибольший угловой охват между соседними значениями ориентации существующих кластеров, a min(d) - наименьший угловой охват между соседними значениями ориентации существующих кластеров. Существуют и другие примеры.
[0122] Итерации 504-512 повторяются для каждого из кластеров в первоначальном множестве кластеров. Итерации 504-512 повторяются также для любых новых кластеров, создаваемых путем объединения (на шаге 508), и любых новых кластеров, создаваемых путем разбиения (на шаге 512), и, в случае создания дополнительных новых кластеров, для этих кластеров, и так далее. Однако, в конечном счете, итерации монотонно сходятся к решению, когда новые кластеры не создаются, или число кластеров при выполнении итераций 504-512 остается постоянным. В некоторых случаях итерации могут сходиться к оптимальному множеству кластеров, при этом каждая итерация последовательно улучшает кластеры. Однако итерации могут давать полезное решение и до достижения полной сходимости. Поэтому можно выбрать вариант прекращения итераций и сохранения всех кластеров до достижения сходимости. В некоторых случаях можно выбрать прекращение итераций, когда скорость изменения числа кластеров ниже заданной скорости, когда кластеры с наибольшим число значений ориентации стабилизируются или имеют доверительную оценку (значение) точности, превышающую некоторое заданное доверительное значение, после некоторого заданного числа итераций, или на основании каких-либо других критериев. В некоторых случаях доверительное значение точности можно вычислить для кластера на основании числа значений ориентации, связанных с этим кластером, степени изменения значений ориентации, связанных с этим кластером, и неопределенности местоположения опорных микросейсмических событий, используемых для определения базовых плоскостей значений ориентации, других значений или любой подходящей комбинации одного или нескольких из этих параметров.
[0123] Представленный на фиг. 6 динамический способ является динамическим в том смысле, что диапазоны ориентации каждого из кластеров определяют динамически исходя из степени изменения в кластерах при создании какого-либо кластера. В этом способе первоначальный кластер образуют на шаге 602, связывая два или несколько соседних значений ориентации с первоначальным кластером. Например, первые два или большее число соседних значений ориентации в конце отсортированных значений ориентации присваивают первоначальному кластеру. Для удобства пользования укажем, что способ в настоящей заявке описан применительно к обработке значений ориентации в нисходящем порядке и, таким образом, первые два значения представляют собой два наибольших значения ориентации; однако способ можно реализовать и в восходящем порядке.
[0124] На шаге 604 определяемую границу кластера, в данном случае - первоначального кластера, устанавливают на основании степени изменения кластера в процессе его определения, например, в виде функции среднеквадратичного отклонения, углового диапазона значений ориентации, или другого количественного показателя изменения. Границу кластера можно определить как заданный максимальный диапазон ориентаций, например, задаваемый в виде порогового углового охвата (Т). Заданный максимум можно определить как функцию фиксированной или изменяемой настроечной переменной и степени изменения кластера. Существует много способов определения границы кластера. Однако в одном примере пороговый угловой охват (Т) составляет

где β - настроечная переменная, а µ - средняя величина значений ориентации в кластере. В примере с фиксированной настроечной переменной β является константой. В некоторых случаях В намного меньше единицы. В некоторых случаях β=0,1. Однако могут использоваться и другие значения β. В примере с изменяемой настроечной переменной

где тβ - константа, а σ - среднеквадратичное отклонение углового расстояния между соседними значениями ориентациями в кластере. В другом примере с изменяемой настроечной переменной

где тβ - константа, dmin - наименьшее расстояние между значениями ориентации в кластере, a dmax - наибольшее расстояние между значениями ориентации в кластере. В некоторых случаях тβ равно 2 или 3. Однако могут использоваться и другие значения τβ.
[0125] Еще в одном примере пороговый угловой охват (Т) составляет

где µ - средняя величина значений ориентации в кластере, τL - настроечная переменная и, если ориентации анализируют в нисходящем порядке, σL - угловое расстояние между наибольшим значением ориентации в формируемом кластере и наименьшим значением ориентации в кластере, предшествующем в угловом направлении. В некоторых случаях τL=0,5. Однако могут использоваться и другие значения τL. В этом примере верхняя граница кластера первоначально может быть определена как

где τR - настроечная переменная, а σ - среднеквадратичное отклонение углового расстояния между соседними значениями ориентации в кластере. В некоторых случаях τR первоначально равно 1 или 2. Однако могут использоваться и другие значения τR. Иначе говоря, для данного значения (О) ориентации, связываемого с кластером, должны выполняться следующие неравенства:

[0126] На шаге 606 следующее значение ориентации в отсортированном списке или связывается с формируемым кластером, или начинает новый кластер. Например, значение ориентации сравнивают с порогом (Т). Если значение ориентации попадает в пределы порога, его связывают с кластером, а если значение ориентации оказывается за пределами порога, оно начинает новый кластер. В примере, где определяется верхний порог (TU), значение ориентации также сравнивают с верхним порогом, определяя, связывать ли значение ориентации с кластером.
[0127] Операции 604 и 606 повторяют для каждого из анализируемых значений ориентации, пока каждое из анализируемых значений ориентации не будет связано с каким-либо кластером, и каждый из кластеров сформирован.
[0128] В некоторых случаях на шаге 608, по мере того, как становится доступной новая информация, может быть выполнена переоценка границы завершенного кластера. Например, кластер завершен, когда операции 604 и 606 больше не связывают с ним значения ориентации, при этом был сформирован новый соседний кластер. Верхнюю границу кластера можно при этом более точно определить как

где, если ориентации анализируют в нисходящем порядке, σR - угловое расстояние между наименьшим значением ориентации в анализируемом кластере и наибольшим значением в следующем соседнем кластере. В некоторых случаях τR=0,5. Иначе говоря, для каждого значения (О) ориентации, связываемого с анализируемым кластером, должны выполняться следующие неравенства:

Если они не выполняются, значение связывают с другим кластером, например, с кластером, предшествующим в угловом направлении, если это значение превышает TU, или со следующим соседним кластером, если значение превышает Т.
[0129] На шаге 610 связь каждого значения ориентации в кластере повторно оценивают с учетом уточненных границ кластера, и, исходя из этой повторной оценки, каждую ориентацию сохраняют связанной с данным кластером или присваивают новому кластеру.
[0130] Операции 608 и 610 повторяют для каждого из анализируемых кластеров. В некоторых случаях операции 608 и 610 могут выполняться после того, как все кластеры были определены при помощи операций 604 и 606. Иногда операции 608 и 610 можно выполнять, пока кластеры определяют при помощи операций 604 и 606, т.е. параллельно с операциями 604 и 606, отслеживая их, например, с помощью другого компьютера, процессора или потока. Например, операции 608 и 610 можно выполнять на кластере после того, как этот кластер был первоначально определен, и в то время как операции 604 и 606 осуществляются, определяя соседний или последующий кластер. Операции, выполняемые параллельно, могут занять меньше времени, чем потребовалось бы, чтобы обработать такой же объем данных при той же скорости в едином потоке.
[0131] В некоторых случаях степень изменения в завершенных кластерах можно анализировать, чтобы определить, следует ли сохранить кластер или выполнить разбиение кластеров. На шаге 612 кластер анализируют, и если будет выявлена высокая степень изменения (например, превышающая заданную величину изменения), и если кластер содержит большое число значений ориентации (например, превышающее заданное число) то на шаге 614 кластер разбивают. При небольшом изменении, или если число значений ориентации невелико, кластер сохраняют. Степень изменения можно вычислять как функцию среднеквадратичного отклонения, угловой охват кластера, или с помощью другого количественного показателя. Существует ряд различных методов, которые можно использовать, чтобы определить, следует ли сохранить или разбить кластер. Однако в одном примере степень изменения определяют путем нахождения максимального углового расстояния между любыми двумя соседними значениями ориентации в кластере. Если эта максимальная степень изменения больше, чем произведение настроечной переменной (τS) на угловое расстояние до соседних значений ориентации с каждой стороны, то степень изменения определяется как высокая. В данном примере число значений ориентации считается большим, если анализируемый кластер содержит в два раза больше значений ориентации, чем любой другой кластер. Если определено, что кластер следует разбить, то его разбивают на два кластера в месте расположения максимального углового расстояния между любыми двумя соседними значениями ориентации в кластере.
[0132] Операции 612 и 614 повторяют для каждого из анализируемых кластеров. В некоторых случаях операции 612 и 614 могут выполняться после того, как все кластеры были определены при помощи операций 604 и 606 и/или повторно оценены при помощи операций 608 и 610. Иногда операции 612 и 614 можно выполнять, пока кластеры определяют при помощи операций 604 и 606 и/или повторно оценивают при помощи операций 608 и 610, т.е. параллельно с операциями 604-610, отслеживая их, например, с помощью другого компьютера, процессора или потока. Операции, выполняемые параллельно, могут занять меньше времени, чем потребовалось бы, чтобы обработать такой же объем данных при той же скорости в едином потоке.
[0133] Бины могут быть идентифицированы по кластеризованным множествам значений ориентации, полученным любым из способов, показанных на фиг. 5 или фиг. 6, и в дальнейшем могут быть использованы в операциях 412-418, представленных выше на фиг. 4, с целью идентификации преобладающих ориентаций трещин, создания гистограммы ориентаций базовых плоскостей и формирования плоскостей трещин.
[0134] Как упоминалось выше, алгоритмы установления соответствия между трещинами, раскрытые в настоящей заявке, включая методы, раскрытые в связи с фиг. 4, могут обрабатывать данные в режиме реального времени, пост-данные или комбинацию данных в режиме реального времени и пост-данных. В связи с выполнением алгоритмов установления соответствия между трещинами, кластеризация, включая кластеризацию при помощи методов, раскрытых в связи с фиг. 5 и фиг. 6, может выполняться по данным в режиме реального времени, пост-данным или комбинации данных в режиме реального времени и пост-данных. В случаях, когда установление соответствия между трещинами выполняют на основании данных в режиме реального времени, или других данных, не относящихся к пост-данным, алгоритмы в ходе выполнения могут обновлять идентифицированные ориентации трещин по мере поступления новых данных. При поступлении новых данных, будет ли это единственное микросейсмическое событие или несколько микросейсмических событий, методы, раскрытые в связи с фиг. 4, а также фиг. 5 или фиг. 6, можно выполнять в целях создания обновленных плоскостей трещин и/или обновленной гистограммы ориентаций базовых плоскостей. В некоторых случаях, независимо от того, выполняют ли анализ полностью на основании пост-данных, частично на основании пост-данных и частично на основании данных, не относящихся к пост-данным, или полностью на основании данных, не относящихся к пост-данным (включая данные в режиме реального времени), методы кластеризации, раскрытые в связи с фиг. 5 и фиг. 6, могут обеспечивать одно и то же статистическое решение.
[0135] В связи с этим, обратимся к фиг. 7, где на шаге 702 принимают новые данные. Методы могут быть реализованы с возможностью инициирования задержки при каждом получении новых данных, пока не будет принято заданное количество новых данных (например, пока не будет принято пороговое число элементов) или с возможностью реагирования на какой-либо другой инициирующий фактор. Однако после того, как принимается решение начать обновление, базовые плоскости обновляют на шаге 704. Обновленные базовые плоскости вызывают обновление кластеров/диапазонов ориентации на шаге 706, поскольку обновленные базовые плоскости могут определить новые значения ориентации. При наличии обновленных кластеров/диапазонов ориентации идентификации преобладающих ориентаций трещин обновляют на шаге 708. При наличии обновленной идентификации преобладающих ориентаций трещин гистограмму ориентаций базовых плоскостей можно обновить на шаге 710, а идентифицированные плоскости трещин можно обновить на шаге 712.
[0136] В примерах, где первоначальные данные кластеризуют с использованием адаптивного метода, например, такого как методы, раскрытые в связи с фиг. 5 или фиг. 6, встраивание нового значения или значений ориентации в кластеры может потребовать переопределения кластеров или части кластеров. Например, установление связи нового значения ориентации с существующим кластером может модифицировать степень изменения значений ориентации в кластере. В итерационном способе эта модификация может привести кластер в состояние, соответствующее критериям объединения с соседним кластером или разбиения. Эта операция, в случае выполнения, может, в свою очередь повлиять на другие соседние кластеры, приведя их в состояние, соответствующее критериям объединения с соседним кластером или разбиения, что, в случае выполнения, может, в свою очередь повлиять на другие кластеры, и так далее, вызвав эффект домино среди кластеров. Если в кластеры встраивается больше, чем одно новое значение ориентации, этот эффект умножается. Динамический способ может испытывать аналогичный эффект домино. Поэтому, по мере встраивания в кластеры новых значений ориентации, кластеры могут подвергаться повторной оценке, а существующие значения ориентации заново связываться с другими кластерами, при этом кластеры распадаются и/или формируются новые кластеры.
[0137] Если процесс встраивания нового значения ориентации или множества значений ориентации был начат, и, спустя какой-то период времени, принимают еще одно новое значение ориентации или множество значений ориентации, встраивание первого значения ориентации или множества значений может быть прекращено. После этого процесс повторной оценки и обновления кластеров запускается снова, на этот раз с учетом значений ориентаций, принятых позднее.
[0138] Некоторые варианты осуществления объекта изобретения и операции, раскрытые в настоящем описании, могут быть реализованы с помощью цифровых электронных схем или программного, микропрограммного или аппаратного обеспечения компьютеров, включая структуры, раскрытые в настоящем описании, и их структурные эквиваленты, или комбинаций одного или нескольких из указанных элементов. Некоторые варианты осуществления объекта изобретения, раскрытого в настоящем описании, могут быть реализованы в виде одной или нескольких компьютерных программ, т.е. одного или нескольких модулей команд компьютерных программ, закодированных на машиночитаемом носителе информации, для исполнения аппаратурой для обработки данных, или управления ее работой. Машиночитаемый носитель информации может представлять собой или входить в состав машиночитаемого устройства хранения данных, машиночитаемой подложки для хранения данных, массива или устройства памяти с произвольным или последовательным доступом, или сочетания одного или нескольких из этих элементов. Кроме того, если машиночитаемый носитель информации не представляет собой распространяющийся сигнал, машиночитаемый носитель может служить источником или пунктом назначения команд компьютерной программы, закодированных в искусственно генерируемом распространяющемся сигнале. Машиночитаемый носитель информации может также представлять собой или входить в состав одного или нескольких физических компонентов или носителей (например, нескольких компакт-дисков, дисков или других устройств хранения данных).
[0139] Термин «аппаратура для обработки данных» охватывает все виды аппаратуры, устройств и машин для обработки данных, в том числе, в качестве примера, программируемый процессор, компьютер, систему на одном или нескольких чипах, или комбинации перечисленных устройств. Аппаратура может включать в себя специализированную логическую схему, например, программируемую логическую интегральную схему ПЛИС (FPGA) или специализированную интегральную схему СИС (ASIC). Аппаратура может также содержать, в дополнение к аппаратным средствам, код, создающий среду выполнения для соответствующей компьютерной программы, например, код, образующий микропрограммное обеспечение процессора, пакет протоколов, систему управления базами данных, операционную систему, кросс-платформенную среду выполнения, виртуальную машину или сочетание одного или нескольких из этих элементов. Аппаратура и среда выполнения позволяют реализовывать разнообразные инфраструктуры моделей вычислений, такие как веб-сервисы, распределенные и сетевые вычислительные инфраструктуры.
[0140] Компьютерная программа (известная также как программа, программное обеспечение, программное приложение, командный сценарий или код) может быть записана в любой форме языка программирования, включая компилируемые или интерпретируемые языки, декларативные или процедурные языки. Компьютерная программа может, но необязательно должна, соответствовать какому-либо файлу в файловой системе. Программа может храниться в части файла, содержащего другие программы или данные (например, один или несколько командных сценариев, сохраняемых в документе, подготовленном с помощью языка разметки), в единственном файле, предназначенном для соответствующей программы, или в нескольких согласованных файлах (например, в файлах, сохраняющих один или несколько модулей, подпрограмм или фрагментов кода). Компьютерная программа может вводиться в действие на одном компьютере или на нескольких компьютерах, расположенных на одной площадке или распределенных по нескольким площадкам и соединенных при помощи коммуникационной сети.
[0141] Некоторые процессы или логические потоки, раскрытые в настоящем описании, могут осуществляться одним или несколькими программируемыми процессорами, исполняющими одну или несколько компьютерных программ для выполнения действий путем обработки входных данных и создания результатов. Процессы или логические потоки могут также выполняться специализированной логической схемой, например программируемой логической интегральной схемой ПЛИС (FPGA) или специализированной интегральной схемой СИС (ASIC), на которых может быть реализована аппаратура.
[0142] Процессоры, подходящие для выполнения компьютерной программы, включают в себя, в качестве примера, как микропроцессоры общего и специального назначения, так и процессоры цифровых компьютеров любого типа. Как правило, процессор получает команды и данные из постоянного или оперативного запоминающего устройства, или из обоих этих устройств. Компьютер содержит процессор для выполнения действий в соответствии с командами и одно или несколько устройств памяти для хранения команд и данных. Компьютер может также содержать или находиться в функциональном соединении с одним или несколькими запоминающими устройствами большой емкости для хранения данных, например, магнитными, магнитооптическими или оптическими дисками для приема или передачи данных с/на эти устройства. Однако в состав компьютера необязательно должны входить такие устройства. Устройства, подходящие для хранения команд компьютерных программ и данных, включают в себя все виды энергонезависимой памяти, носителей и запоминающих устройств, в том числе, в качестве примера, полупроводниковые запоминающие устройства (например, ЭППЗУ (EPROM), ЭСППЗУ (EEPROM), устройства флэш-памяти и другие), магнитные диски (например, внутренние жесткие диски, съемные диски и другие), магнитооптические диски, а также диски CD-ROM и DVD-ROM. Процессор и память могут дополняться специализированной логической схемой или быть встроенными в нее.
[0143] Для обеспечения взаимодействия с пользователем операции могут реализовываться на компьютере, имеющем устройство отображения (например, монитор или другой тип устройства отображения), чтобы отображать информацию для пользователя, клавиатуру и указательное устройство (например, мышь, трекбол, планшет для ввода информации, сенсорный экран или другой тип указательного устройства), с помощью которого пользователь может обеспечить ввод данных в компьютер. Другие виды устройств также могут использоваться для обеспечения взаимодействия с пользователем; так, обратная связь, предоставляемая пользователю, может быть любым видом сенсорной обратной связи, например, визуальной обратной связью, слуховой обратной связью или тактильной обратной связью; данные вводимые пользователем, могут восприниматься в любой форме, включая акустический, речевой или тактильный ввод. Кроме того, компьютер может взаимодействовать с пользователем, посылая и принимая документы с устройства, применяемого пользователем; например, посылая веб-страницы на веб-браузер клиентского устройства пользователя в ответ на запросы, принимаемые от веб-браузера.
[0144] Клиент и сервер в большинстве случаев удалены друг от друга и, как правило, взаимодействуют через коммуникационную сеть. Примерами коммуникационных сетей являются локальная вычислительная сеть ЛВС (LAN), глобальная вычислительная сеть ГВС (WAN), интерсеть (например, Интернет), сеть, содержащая спутниковый канал, и одноранговые сети (например, самоорганизующиеся одноранговые сети). Взаимосвязь клиента и сервера возникает посредством компьютерных программ, работающих на соответствующих компьютерах и имеющих отношение клиент-сервер друг с другом.
[0145] В некоторых аспектах настоящего описания преобладающие варианты ориентации, встроенные во множества трещин, связанных с микросейсмическими событиями, могут быть идентифицированы в динамическом режиме в ходе гидроразрыва. Например, плоскости трещин могут быть получены по микросейсмическим событиям в режиме реального времени, собранным на месторождении. Плоскости трещин можно идентифицировать на основании информации о микросейсмических событиях, включая данные о местоположениях событий, неопределенности измерения местоположения событий, моментальных магнитудах событий, моментах времени возникновения событий и другую информацию. В каждый момент времени данные могут быть связаны с ранее вычисленными базовыми плоскостями, включая опорные множества микросейсмических событий.
[0146] В некоторых аспектах настоящего описания гистограмма вероятностей или распределение базовых плоскостей могут строиться на основании собранных микросейсмических событий, при этом гистограмму или распределение можно использовать для получения преобладающих ориентаций трещин. Трещины, выделенные вдоль преобладающих ориентаций, могут в некоторых случаях обеспечивать оптимальное соответствие с микросейсмическими событиями в режиме реального времени. Гистограмма или распределение и преобладающие ориентации могут обладать довольно значительной чувствительностью к новому наступающему микросейсмическому событию. По существу, некоторые плоскости, идентифицируемые во время встраивания микросейсмических данных, могут не быть точными при сравнении с результатами пост-данных о микросейсмических событиях.
[0147] В некоторых аспектах настоящего описания доверительное значение точности может обеспечивать количественный показатель точности идентификации плоскостей в режиме реального времени. К факторам, воздействующим на доверительное значение точности, могут относиться внутренние свойства события, соотношение между опорными событиями и плоскостью и вес, отражающий тенденции ориентации трещин пост-данных о микросейсмических событиях. В некоторых случаях плоскости трещин с высокой достоверностью (высоким уровнем доверительной вероятности) по окончании гидравлического разрыва, идентифицированные в режиме реального времени, согласуются с плоскостями трещин, полученными по пост-данным о событиях.
[0148] В некоторых аспектах все или некоторые признаки, раскрытые в настоящей заявке, могут комбинироваться или реализовываться по отдельности в одной или нескольких компьютерных программах для автоматизированного картирования трещин в режиме реального времени. Программное обеспечение может быть реализовано в виде компьютерного программного продукта, установленного приложения, клиент-серверного приложения, интернет-приложения или любого другого подходящего программного обеспечения. В некоторых случаях программа автоматизированного картирования трещин в режиме реального времени может динамически показывать пользователям пространственную и временную эволюцию идентифицированных плоскостей трещин в режиме реального времени по мере постепенного накопления микросейсмических событий. Динамика может включать в себя, например, создание новых трещин, распространение и рост существующих трещин, или другие виды динамики. Иногда программа автоматизированного картирования трещин в режиме реального времени предоставляет пользователям возможность просматривать идентифицированные в режиме реального времени плоскости трещин при нескольких уровнях доверительной вероятности. В некоторых случаях пользователи могут наблюдать пространственную и временную эволюцию трещин с высоким уровнем доверительной вероятности, которые могут демонстрировать преобладающие тенденции полных данных о микросейсмическом событии. Иногда программа автоматизированного картирования трещин в режиме реального времени может оценивать доверительное значение точности трещины, например, с целью измерения определенности идентифицированных плоскостей трещин. Доверительные значения точности трещины могут, например, помогать пользователям лучше понимать и анализировать изменения гистограмм вероятностей или распределения ориентаций, которые могут непрерывно изменяться по мере накопления микросейсмических событий в режиме реального времени. В некоторых случаях программа автоматизированного картирования трещин в режиме реального времени может обеспечивать результаты, согласующиеся с картированием трещин на основании пост-данных. Например, по окончании гидравлического разрыва результаты, получаемые программой автоматизированного картирования трещин в режиме реального времени, могут статистически согласовываться с результатами, полученными путем обработки тех же данных программой автоматизированного картирования трещин в режиме пост-данных. Такие характеристики могут позволить промысловым инженерам, операторам и аналитикам динамически визуализировать и контролировать пространственную и временную эволюцию гидроразрывных трещин, анализировать сложность трещин и форму месторождения, оценивать эффективность гидроразрыва или улучшать эксплуатационные характеристики скважины.
[0149] Хотя данное описание изобретения содержит много деталей, их не следует рассматривать как ограничения объема формулы изобретения, а скорее как описания признаков, присущих конкретным примерам. Некоторые признаки, раскрытые в настоящем описании в контексте отдельных вариантов осуществления, могут также комбинироваться. Напротив, характеристики, раскрытые в контексте единственного варианта осуществления, могут быть реализованы по отдельности в нескольких вариантах осуществления или в любых подходящих подкомбинациях.
[0150] В заявке раскрыт ряд вариантов осуществления. Тем не менее, следует понимать, что в них могут быть внесены различные модификации. Соответственно другие варианты осуществления входят в объем притязаний приведенной ниже формулы изобретения.
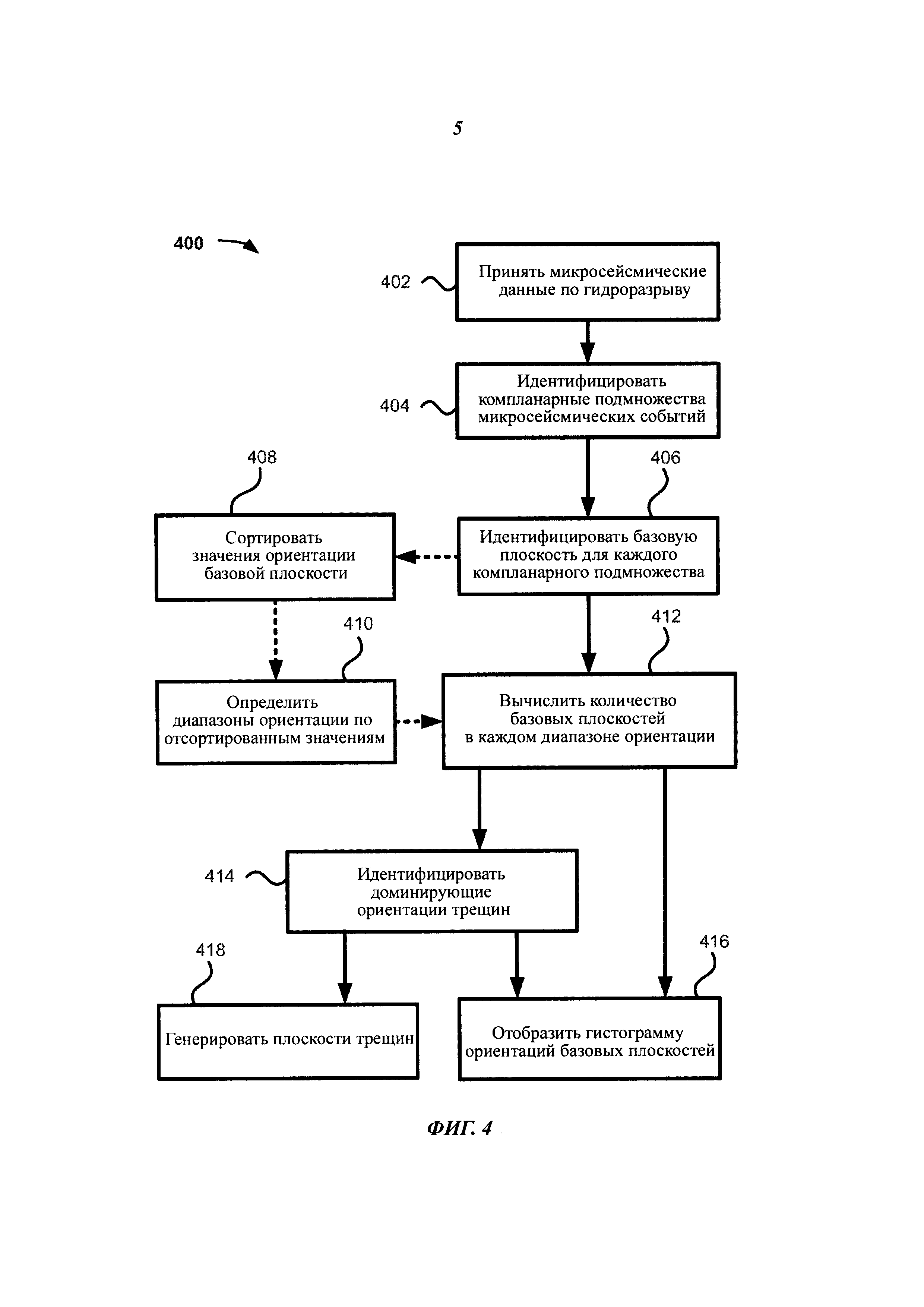
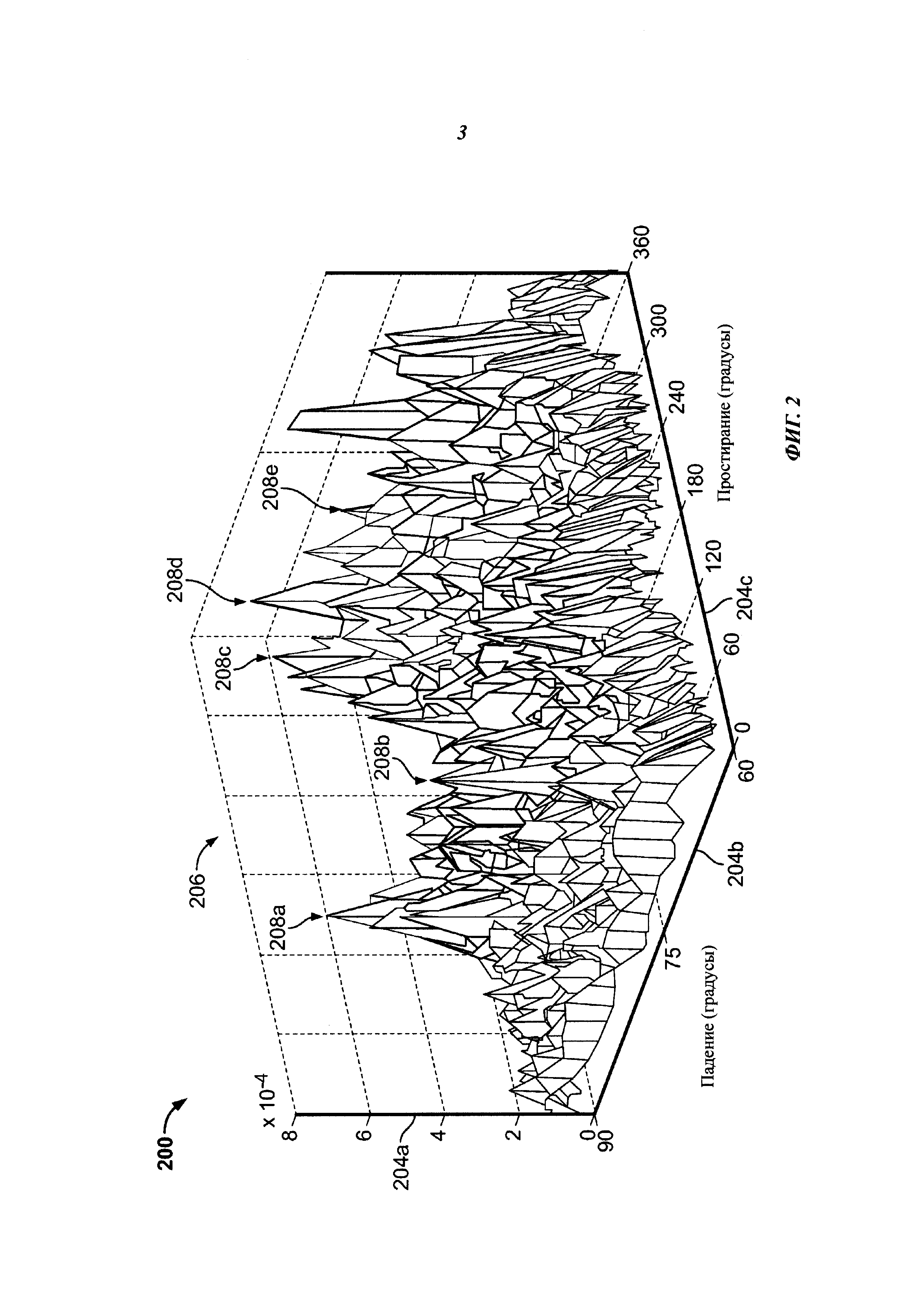
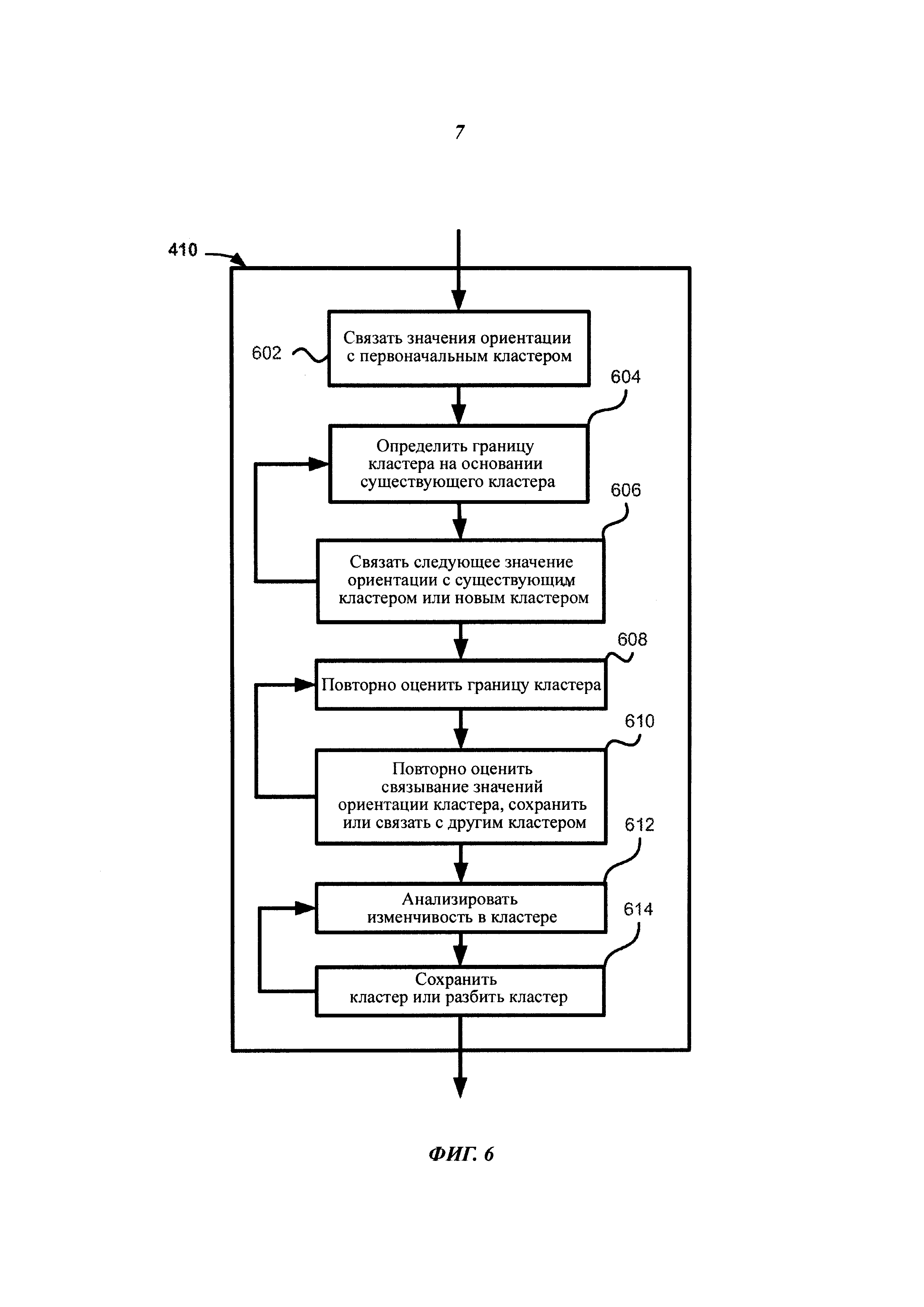
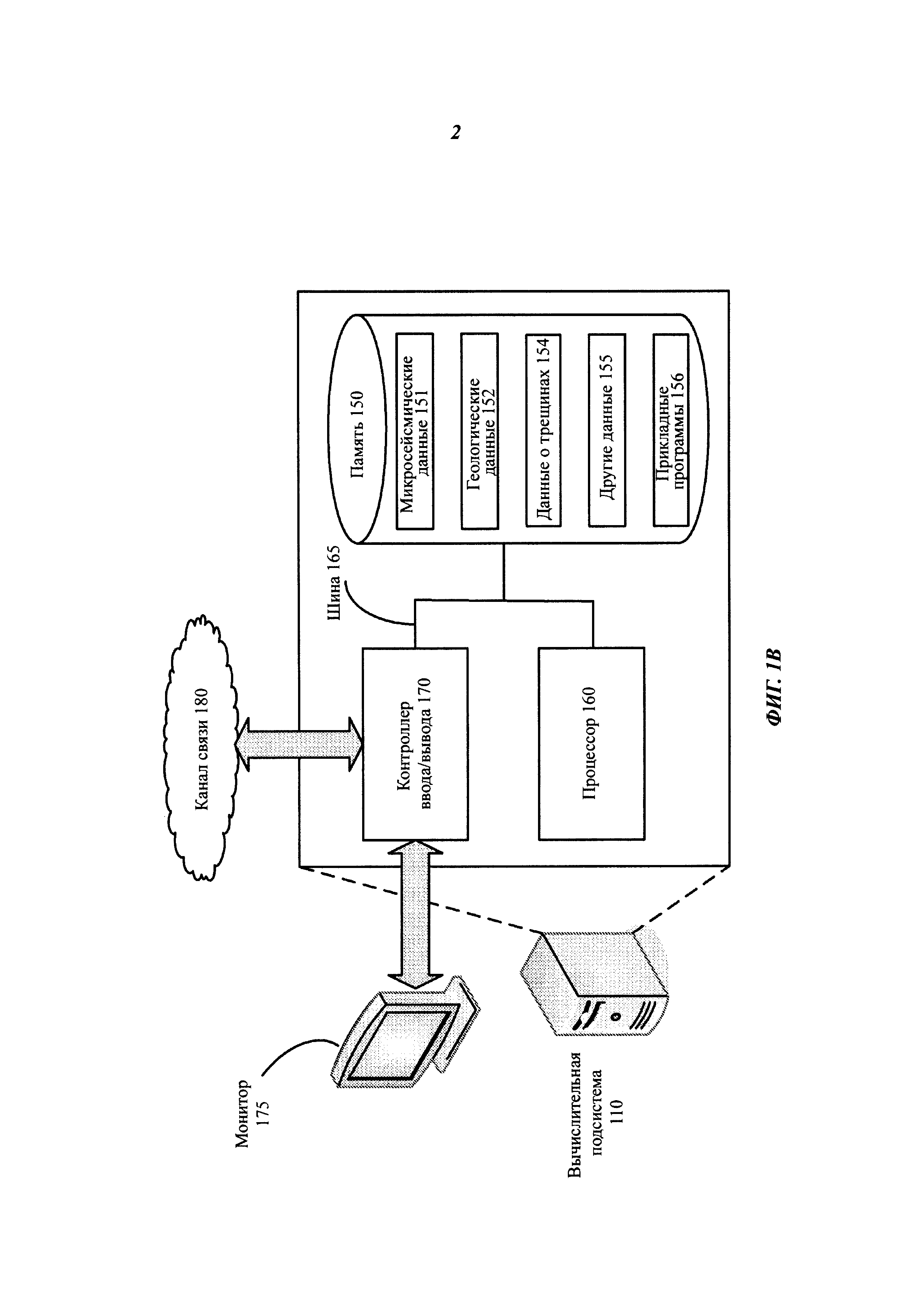
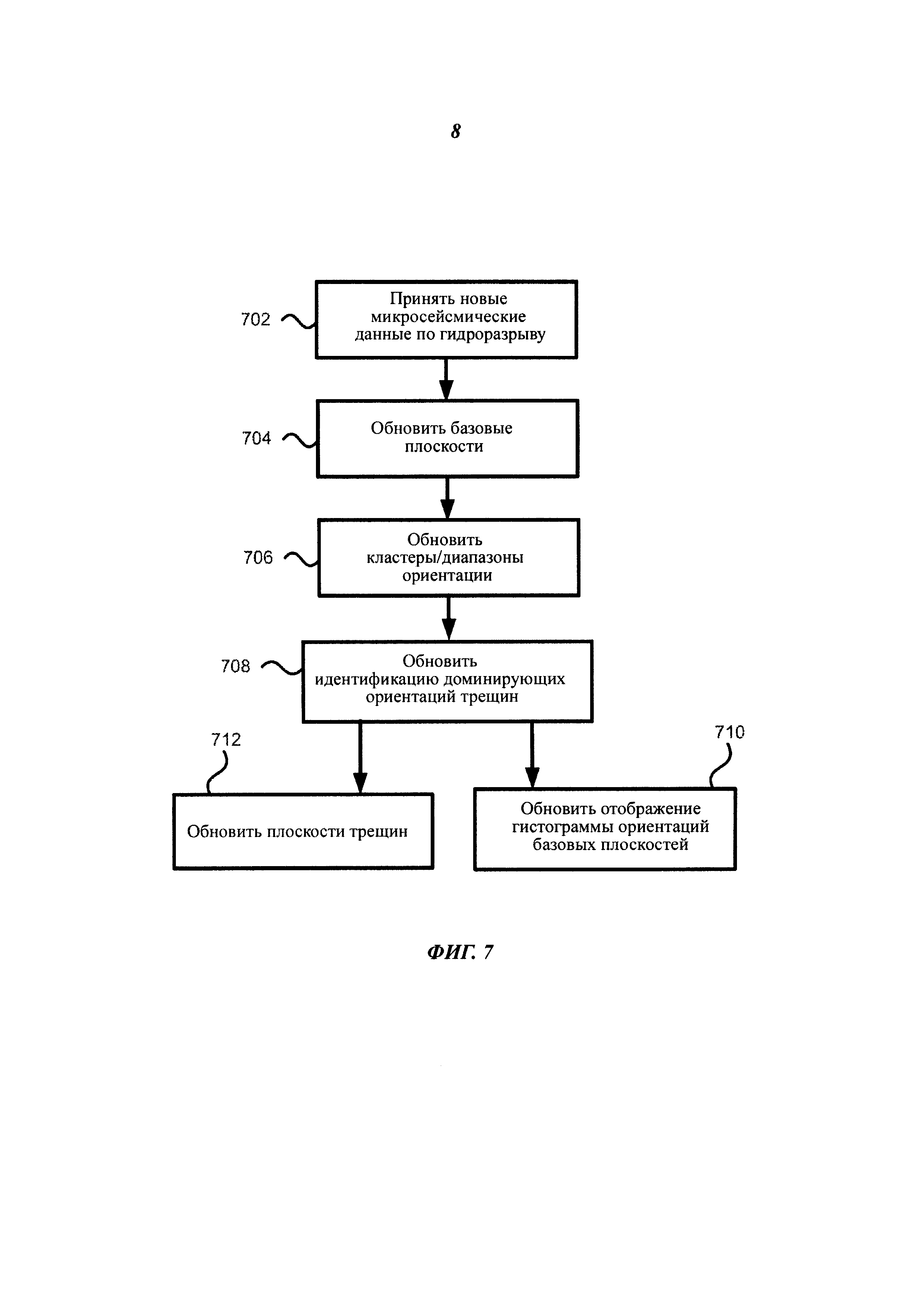
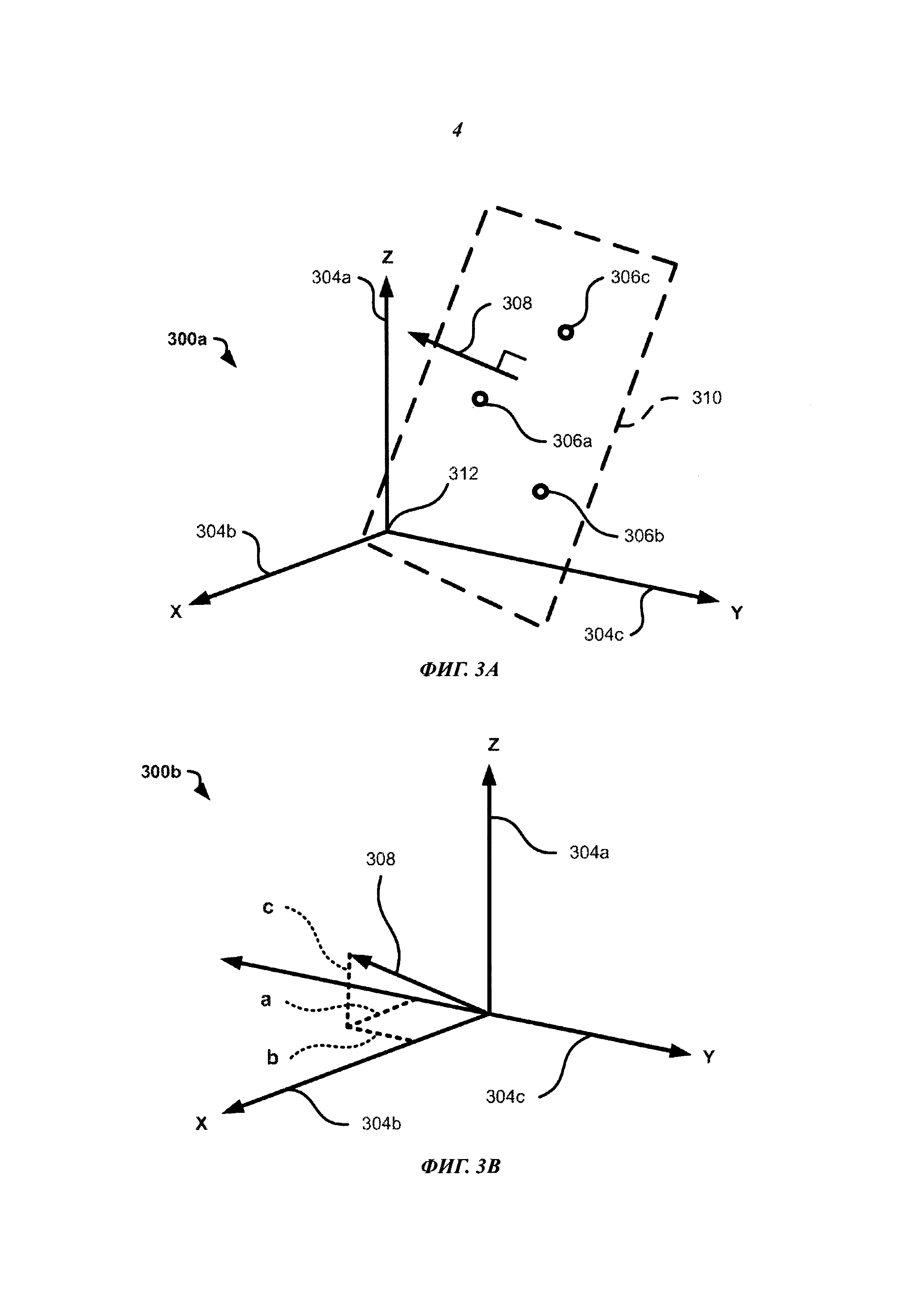
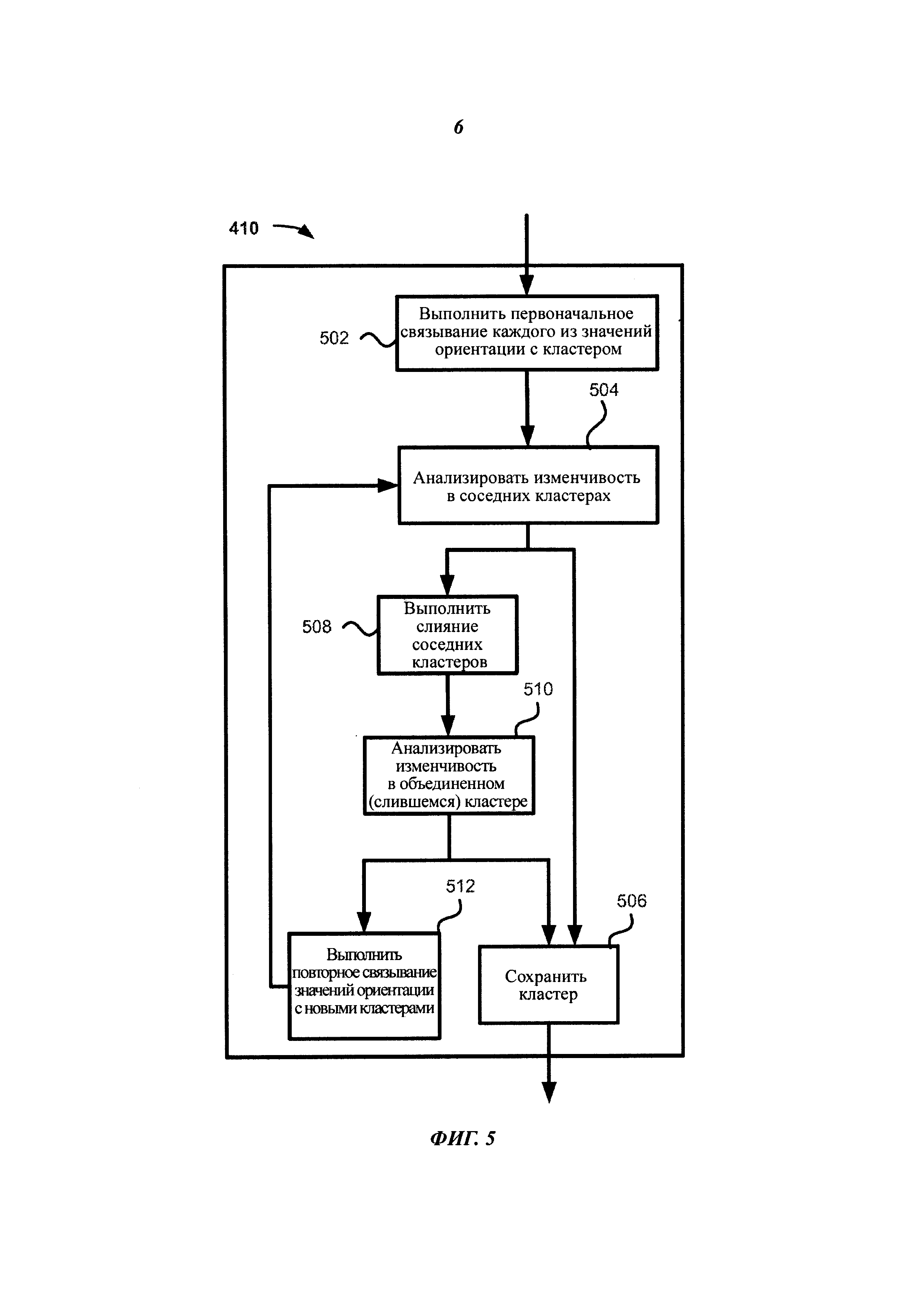
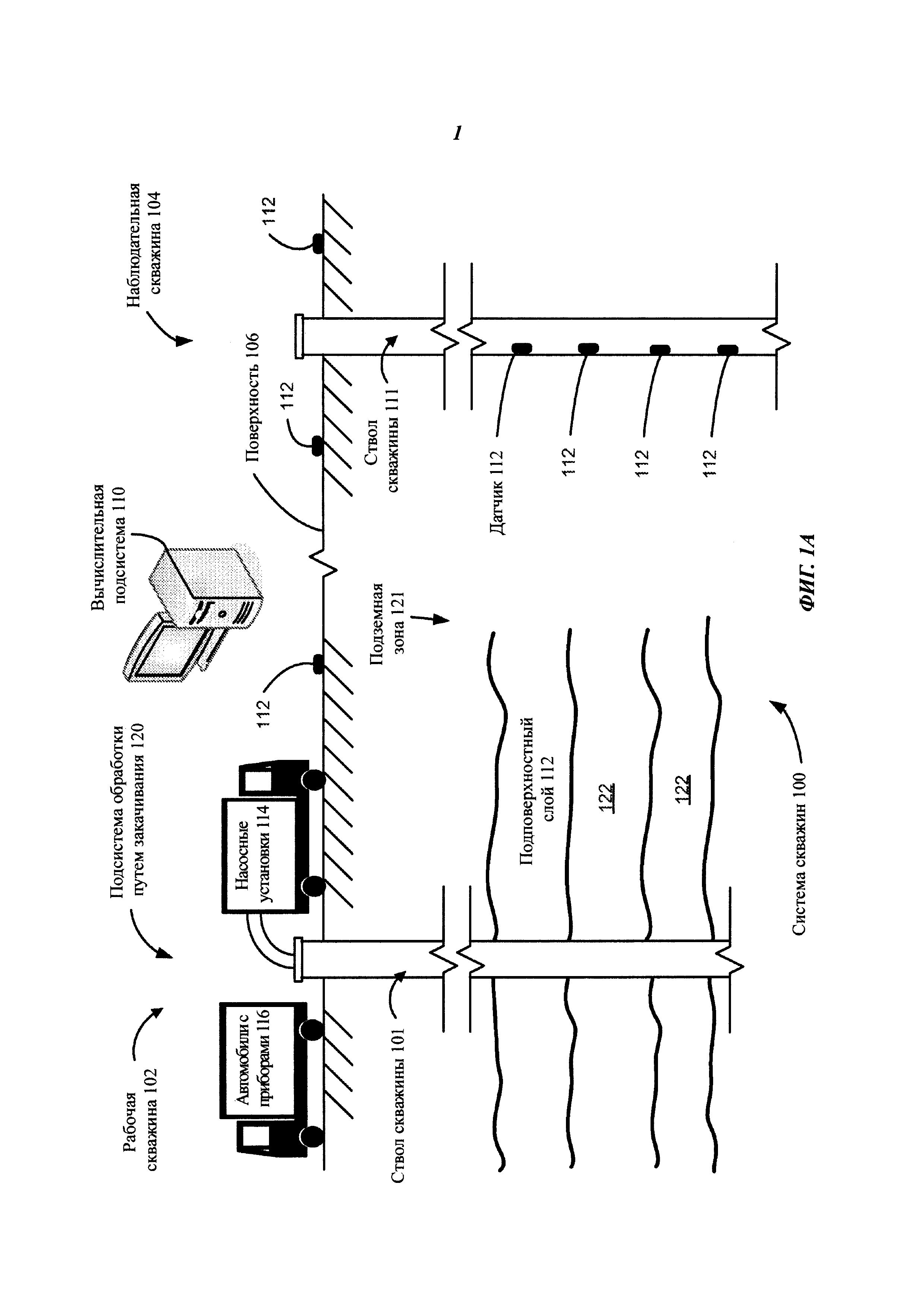
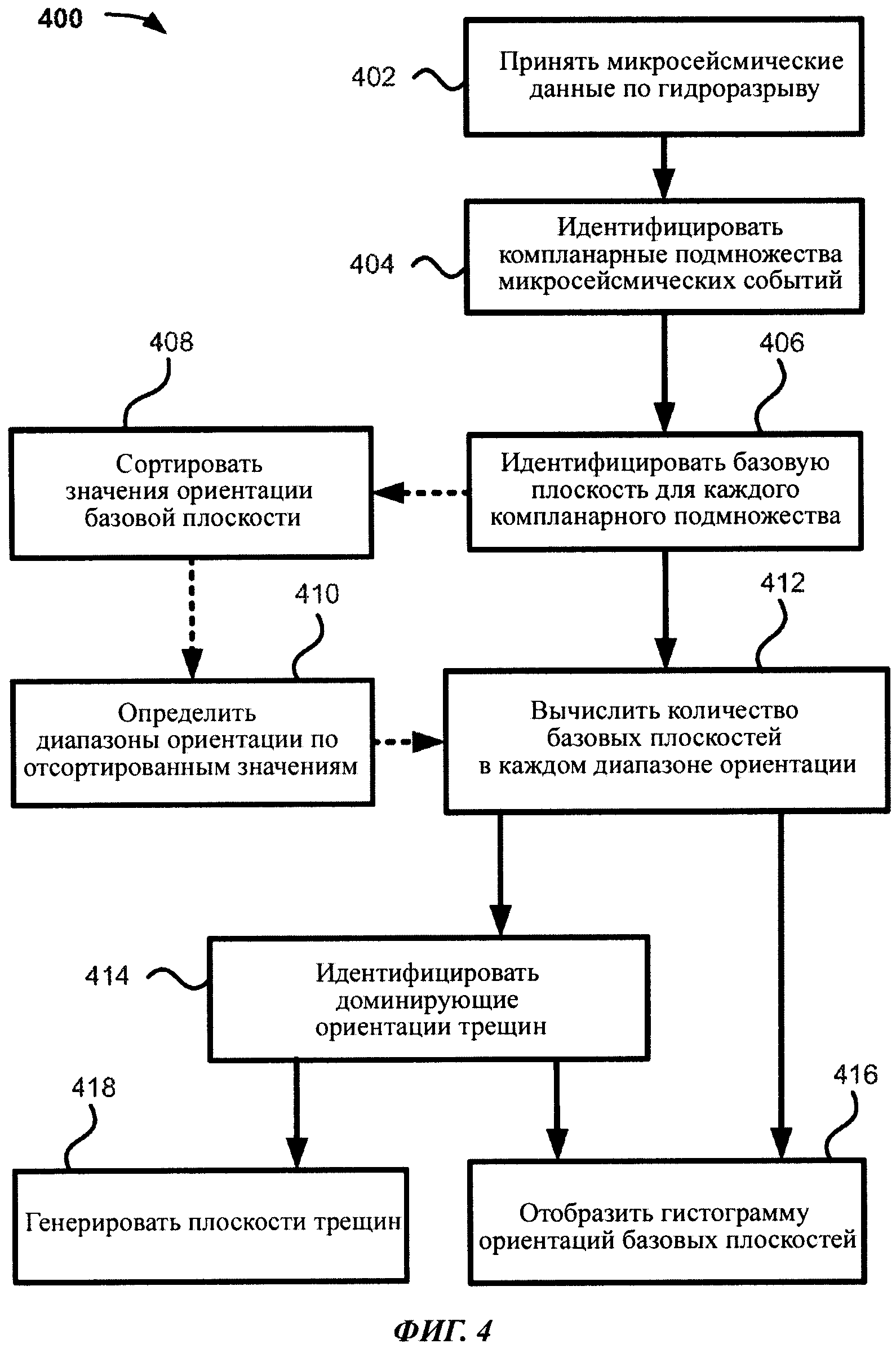
Дифференциальный скважинный инструмент и способ его применения
Узел оборудования для отклонения бура и снаряда для заканчивания скважины
Устройство и способ удаления обломков из скважинного флюида в стволе скважины
Устройство для направления флюида с узлом переключения потока в зависимости от давления
Составной центратор
Система и способ автоматической калибровки нагрузки на датчик бурового долота и регулирования изгиба бурильной колонны
Буровое долото для выполнения электромагнитных измерений в подземном пласте
Прокладка линий через уплотнительные элементы пакерного узла и предотвращение экструзии указанных уплотнительных элементов
Способы инициирования новых разломов в законченном стволе скважины, уже содержащем разломы
Поршневая тянущая система, используемая в подземных скважинах
Дифференциальный скважинный инструмент и способ его применения
Узел оборудования для отклонения бура и снаряда для заканчивания скважины
Устройство и способ удаления обломков из скважинного флюида в стволе скважины
Устройство для направления флюида с узлом переключения потока в зависимости от давления
Составной центратор
Система и способ автоматической калибровки нагрузки на датчик бурового долота и регулирования изгиба бурильной колонны
Буровое долото для выполнения электромагнитных измерений в подземном пласте
Прокладка линий через уплотнительные элементы пакерного узла и предотвращение экструзии указанных уплотнительных элементов
Способы инициирования новых разломов в законченном стволе скважины, уже содержащем разломы
Поршневая тянущая система, используемая в подземных скважинах

