Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ МНОГОКАНАЛЬНОГО ЛАЗЕРА В ЗАДАННЫЕ ТОЧКИ МИШЕНИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к оптической технике, а именно к многоканальным излучателям и может быть использовано для автоматической юстировки и наведения пучков излучения на мишень при подготовке ее к физическим экспериментам.
Задачей, стоящей в рассматриваемой области техники, является создание способа и устройства, обеспечивающих точное сведение нескольких пучков и фокусировку излучения на требуемой дистанции в предельно малое пятно.
Известны способ и устройство наведения излучения в заданную точку мишени при подготовке ее к физическим экспериментам на многоканальной лазерной установке LMJ [Michel Luttmann et.al. Laser Megajoule alignment to target center. Proc. of SPIE, v. 7916, 79160N (2011)]. Способ включает в себя определение, фиксацию и воспроизведение координат центра сферической мишенной камеры (МК), сведение и фокусировку пучков лазерных каналов в заданные точки устройства, устанавливаемого в центральную область камеры, и юстировку самой мишени. Юстировку лазерных пучков на мишень, расположенную в центре сферической МК, в данном способе осуществляют с помощью специального устройства, называемого the Common Reference (CR), вводимого в центральную область камеры. CR является краеугольным камнем в процедуре определения координат центра МК установки LMJ и точного наведения лазерных пучков на мишень. Оно содержит источник непрерывного юстировочного излучения и вращающееся зеркало с центром, сохраняющим свое местоположение. В состав оборудования для определения координат центра камеры и юстировки мишени входят также 6 телемикроскопов, называемых SOPAC, расположенных вокруг МК парами друг напротив друга с общей осью, проходящей через центр камеры в отъюстированном положении. При этом SOPAC калибруют с помощью еще одного специального устройства, вводимого в центральную область МК, которое содержит набор шариков. Наведение и фокусировка лазерных пучков осуществляется методом автоколлимации с помощью CR и устройства, называемого Alignment Sensor (AS), расположенного в конце секции усилителя вблизи пространственного фильтра.
Юстировка на установке LMJ предполагает связывание каждого телемикроскопа SOPAC путем его облучения от точечного источника непрерывного юстировочного излучения CR при вращении зеркала CR вокруг центра, помещенного в центральную область МК. В дальнейшем, когда устройство CR удалено, вводится мишень, она юстируется с помощью 6-ти откалиброванных телемикроскопов SOPAC путем совмещения трех теневых изображений мишени (профилей) с электронными теневыми изображениями мишени в отъюстированном положении.
Достоинством такой схемы наведения лазерных пучков на мишень и юстировки мишени является отсутствие ограничения на геометрию сведения лазерных пучков на мишень, а недостатками - сложность конструкции RC и AS, большое количество SOPAC (6 штук), которые также необходимы для контроля координат центра камеры и юстировки мишени.
Известны способ и система наведения излучения многоканальной лазерной установки на мишень по патенту RU 2532649, публик. 10.11.2014. Для повышения точности настройки параметров лазерного излучения на мишени устройство включает первый объектив, первый и второй линзовые компоненты которого установлены с возможностью перемещения вдоль оптической оси объектива. Третий линзовый компонент установлен неподвижно. Система включает лазер наведения и, по меньшей мере, один дополнительный, идентичный первому объектив, расположенные таким образом, что оптические оси лазера наведения и всех объективов пересекаются в одной точке. Расстояния от оптической оси лазера наведения до оптических осей объективов одинаковы. Каждый объектив дополнительно включает плоскопараллельную пластину, установленную перед первым компонентом с возможностью поворота вокруг оси, перпендикулярной меридиональной плоскости системы. Все оптические компоненты объективов выполнены из кварцевого стекла. Плоскопараллельные пластины, первые и вторые компоненты объективов кинематически синхронизированы друг с другом.
Способ включает в себя следующие процессы. Перед началом работы оптический выход каждого объектива оптически сопрягают с выходом каждого их каналов лазера. Включают лазер наведения и по его лучу ориентируют объективы в пространстве так, чтобы излучение многоканального лазера было направлено в сторону мишени. При перефокусировке с меньшей на большую дистанцию первый линзовый компонент каждого объектива синхронно с первыми линзовыми компонентами остальных объективов движется к лазеру наведения, второй - в противоположную сторону, а третий остается на месте. Сведение и фокусировка пучков излучения многоканальной лазерной установки в одну точку, расположенную на оси лазера наведения, достигаются синхронным поворотом плоскопараллельных кварцевых пластин.
Недостатком известного способа и системы является наличие ограничений на симметрию облучения мишени.
Также известны способ и комплекс наведения излучения [S J. Boege et.al. NIF pointing and centering systems and target alignment using a 351 nm laser source / Proc. of SPIE, v. 3047, 0276X (1997)] многоканальной лазерной установки NIF [D.H. Kalantar et. al. An overview of target and diagnostic alignment at the National Ignition Facility. Proc. of SPIE, v. 8505, 850509 (2012)] на мишень, которые выбраны в качестве наиболее близкого аналога.
Способ наведения излучения основывается на видеоизображениях базы отсчета (световых маркеров) и пучков и включает предварительную монтажную юстировку источника юстировочного излучения, иллюминаторов МК и датчиков, определение, фиксацию и воспроизведение координат центра сферической МК, сведение и фокусировку пучков лазерных каналов в заданные точки мишени, устанавливаемой в центральной области МК, и юстировку мишени. Определение и воспроизведение координат центра МК осуществляют при помощи установленных под углом 90° двух датчиков контроля координат центра МК, так называемые the Chamber Center Reference System (CCRS), в количестве 2 штук, расположенных за пределами сферической камеры. Каждый CCRS представляет собой оптическую систему с двумя фотоприемниками, осветительным (излучатель), автоколлимационным (коллиматор) и измерительным (микротелескоп) каналами, которые определяют две угловые и две линейные координаты наблюдаемого объекта - имитатора мишени. Для определения координат центра МК вводят в центр МК имитатор мишени, выполненный в виде шарика, вводимого на позиционере с точностью 0,1 мм в центр МК, и осуществляют следующие процедуры. Оси датчиков контроля координат центра МК устанавливают по центру изображения шарика, фокусируют измерительный канал на поверхность имитатора мишени, смещением датчиков совмещают изображение центра имитатора мишени, который принимают за центр МК, с центром датчика, фиксируют и сохраняют значения линейных и угловых координат центра МК для этих датчиков, а положение датчиков оставляют неизменным. Далее осуществляют сведение и фокусировку лазерных пучков в заданные точки мишени с помощью специального устройства сведения пучков и юстировки мишени, the Target Alignment Sensor (TAS) [P. Di Nicola et.al. Beam and target alignment at the NIF using Target Alignment Sensor (TAS). Proc. of SPIE, v. 8505, 850508 (2012)]. Это устройство устанавливают в МК с совмещением координат его центра с ранее определенными координатами центра МК. Устройство сведения пучков и юстировки мишени представляет собой оптическую систему, состоящую из двух измерительных каналов, расположенных по одной оси, и дополнительного канала, расположенного ортогонально. Каждый из каналов, расположенных по одной оси, включает камеру и зеркало с линзой в центре, ортогональный им канал включает камеру и линзу. Геометрия устройства сведения и юстировки позволяет сводить пучки излучения от всех каналов лазера в две точки пространства центральной зоны МК, соответствующие центрам отверстий ввода цилиндрического бокс-конвертора с рабочей мишенью, меняя направления пучков. Контроль сведения осуществляют по двум соосным камерам. Далее заводят в центр устройства сведения бокс-конвертор с рабочей мишенью, контролируя его положение двумя соосными камерами устройства сведения до совмещения изображения центра его отверстий с центром матриц камер, при этом вертикальное позиционирование бокс-конвертора осуществляют третьей камерой.
Достоинством таких способа и комплекса является то, что при определение и контроле координат центра мишенной камеры имеется потребность всего в двух CCRS, а недостатком - невозможность использования CCRS такой конструкции в качестве датчика контроля юстировки мишени относительно центра МК, роль которого на установке NIF выполняет TAS, однако TAS позволяет сводить и фокусировать лазерные пучки в заданные точки только для определенного типа мишени и при определенных условиях ее облучения и непригодно, например, для кубической симметрии облучения мишени. Кроме того, юстировка занимает длительное время из-за невозможности обеспечения автоматизации всех процессов, входящих в нее.
Техническим результатом, достигаемым за счет применения заявляемого способа, является обеспечение универсальности (применение для различных типов мишеней, без ограничения типа геометрии сведения пучков на мишень) и повышение быстродействия (автоматизация всех процессов, сокращение времени).
Указанный технический результат достигается за счет того, что в способе наведения излучения многоканального лазера в заданные точки мишени, включающем предварительную монтажную юстировку источника котировочного излучения, иллюминаторов мишенной камеры и датчиков, определение центра мишенной камеры с помощью ортогонально расположенных вне мишенной камеры в ее экваториальной плоскости двух датчиков Д1 и Д2 с измерительным, автоколлимационным и осветительным каналами и устанавливаемого с помощью устройства позиционирования в центр мишенной камеры имитатора мишени, оси датчиков Д1 и Д2 устанавливают по центру изображения имитатора мишени, фокусируют измерительный канал на поверхность имитатора мишени, смещением датчиков совмещают изображение центра имитатора мишени с центром датчиков, центр имитатора мишени принимают за центр мишенной камеры, фиксируют и сохраняют значения линейных и угловых координат точек центра мишенной камеры для этих датчиков, оставляя неизменным их положение, далее осуществляют сведение и фокусировку всех пучков лазерных каналов в заданные точки пространства в центральной области мишенной камеры, фиксируют и сохраняют координаты точек фокусировки пучков, заводят в эту зону бокс-конвертор с рабочей мишенью до совмещения центров отверстий бокс-ковертора с заданными точками пространства, новым является то, что для фиксации координат точек центра мишенной камеры используют дополнительные датчики, аналогичные Д1 и Д2, два из которых ДЗ и Д4 располагают в экваториальной плоскости мишенной камеры соосно датчикам Д1 и Д2, а два других Д5 и Д6 - соосно друг другу в области полюсов мишенной камеры, в качестве имитатора мишени используют куб с зеркальными гранями и с оптическими метками на них, при определении и фиксации координат центра мишенной камеры для датчиков Д1 и Д2 осуществляют взаимную юстировку куба и датчиков, для чего оптические оси последних совмещают с нормалями к каждой из двух взаимно перпендикулярных зеркальных граней куба, потом аналогичным образом определяют и фиксируют координаты центра мишенной камеры для датчиков Д3 и Д4, а затем фиксируют координаты центра мишенной камеры для датчиков Д5 и Д6 путем их линейных и угловых подвижек и помещения в центр приемной площадки этих датчиков изображения вершины имитатора мишени для получения проекции его видимых граней в виде правильного шестиугольника с центром приемной площадки датчиков, а сведение всех пучков многоканального лазера в заданные точки пространства и юстировку мишени осуществляют с помощью этих же шести датчиков, но используя другой кубический имитатор мишени, каждая грань которого имеет две области - центральную с матовой поверхностью и периферийную с зеркальной поверхностью, причем лазерные пучки наводят на центры граней этого имитатора мишени и регистрируют оптические метки на гранях таким образом, чтобы с центром приемной площадки датчиков совпадали изображения метки на соответствующей грани куба для датчиков Д1-Д4, а для датчиков Д5 и Д6 -соответствующие вершины куба, при этом фокусировку и наведение пучков на точки граней имитатора мишени выполняют по командам автоматически путем продольных перемещений фокусирующей линзы финального оптического модуля и угловых заклонов зеркал системы транспортировки, после наведения и фокусировки всех лазерных пучков в заданные точки пространства в центральной области мишенной камеры координаты этих точек сведения и фокусировки всех лазерных пучков на гранях имитатора мишени фиксируют, после чего имитатор мишени выводят из мишенной камеры и заводят бокс-конвертор с рабочей мишенью, которую юстируют с помощью устройства позиционирования мишени и датчиков Д1-Д6.
После определения и фиксации координат точек центра мишенной камеры могут осуществлять цифровую обработку результатов.
Координаты точек сведения и фокусировки всех лазерных пучков многоканальной установки на гранях имитатора мишени могут фиксировать в электронной 3D модели мишенной камеры.
Юстировку мишени могут осуществлять, предварительно построив 3D модель мишени в отъюстированном положении в центре мишенной камеры в электронной трехмерной 3D модели мишенной камеры с ее теневыми изображениями для каждого датчика Д1-Д6, затем минимизируют отклонения теневых изображений рабочей мишени от теневых изображений, полученных на 3D модели.
Юстировку мишени могут осуществлять с помощью зеркального прямоугольного параллелепипеда с оптическими метками и с заранее определенными координатами относительно отверстий бокс-конвертора, контроль положения которого осуществляют экваториальными датчиками, с помощью которых регистрируют координаты параллелепипеда относительно центра мишенной камеры, вычисляют рассогласование положения мишени относительно соответствующих точек пространства сведения сфокусированных ранее лазерных пучков всех каналов и величину рассогласования координат положения мишени уменьшают до требуемой минимальной величины с помощью устройства позиционирования.
Указанный технический результат достигается за счет того, что в комплексе наведения излучения многоканального лазера в заданные точки мишени, содержащем устройство дистанционного определения и контроля координат центра мишенной камеры, которое включает имитатор мишени, установленный в центре мишенной камеры, и два датчика Д1 и Д2, установленных вне мишенной камеры под углом 90° друг к другу, каждый из которых состоит из микро телескопа с автоколлимационной визирной трубой, коллиматором, излучателем и приемником, устройство наведения пучков и контроля юстировки мишени, устройство позиционирования мишени в мишенной камере, исполнительные органы перемещений зеркал и линз систем транспортировки финального оптического модуля многоканальной установки, новым является то, что вокруг мишенной камеры дополнительно размещены четыре датчика, выполненные аналогично датчикам Д1 и Д2, два из которых Д3 и Д4 расположены в экваториальной плоскости соосно датчикам Д1 и Д2, а два других Д5 и Д6 - в области полюсов мишенной камеры соосно друг другу, при этом общая ось датчиков, расположенных напротив друг друга, проходит через центр мишенной камеры в отъюстированном положении и все датчики Д1-Д6 являются как датчиками устройства дистанционного определения и контроля координат центра мишенной камеры, так и датчиками устройства наведения пучков и контроля юстировки мишени, дополнительно введены устройство автоматической обработки изображений излучений и автоматизированный блок формирования команд исполнительным органам перемещений зеркал и линз систем транспортировки финального оптического модуля, при этом имитатор мишени устройства дистанционного определения и контроля координат центра мишенной камеры выполнен в виде куба с зеркальными гранями и оптическими метками, а в устройство наведения пучков и контроля юстировки мишени включен также кубический имитатор мишени, но его грани выполнены с двумя областями - центральная с матовой поверхностью, периферийная с зеркальной поверхностью, а размер ребер соответствует диаметру бокс-конвертора мишени, устройство позиционирования мишени снабжено автоматизированной системой управления положением мишени.
Наличие отличительных признаков в способе и комплексе позволяет:
- юстировать мишень без ограничения типа геометрии сведения пучков на мишень;
- использовать одинаковые устройства для контроля координат центра сферической мишенной камеры и для контроля юстировки объектов, в частности мишени, относительно центра камеры;
- выполнить имитатор мишени с небольшими габаритами и обеспечить возможность его легкого встраивания в конструкцию комплекса при определении координат центра мишенной камеры;
- однозначно определить положение объекта в трехмерном пространстве;
- регистрировать различные объекты на расстоянии до 8-10 м с требуемым разрешением в пространстве предметов вблизи центра мишенной камеры в зоне размером не менее 50×50×50 мм и сфокусированные лазерные пятна на имитаторе мишени дифракционного размера;
- обеспечить требуемую точность регистрации теневых картин мишени (ее профиля) при юстировке;
- обеспечить точную автоматическую юстировку всех лазерных пучков многоканальной установки в заданные точки на мишени;
- ускорить процесс юстировки многоканальной лазерной установки;
- получить универсальный способ юстировки для различных типов мишеней (прямого или непрямого действия, криогенной или некриогенной);
- размещать датчики как на оси кластерных групп финальных оптических модулей, так и со смещением относительно этих осей;
- получить возможность автоматизации всего процесса юстировки.
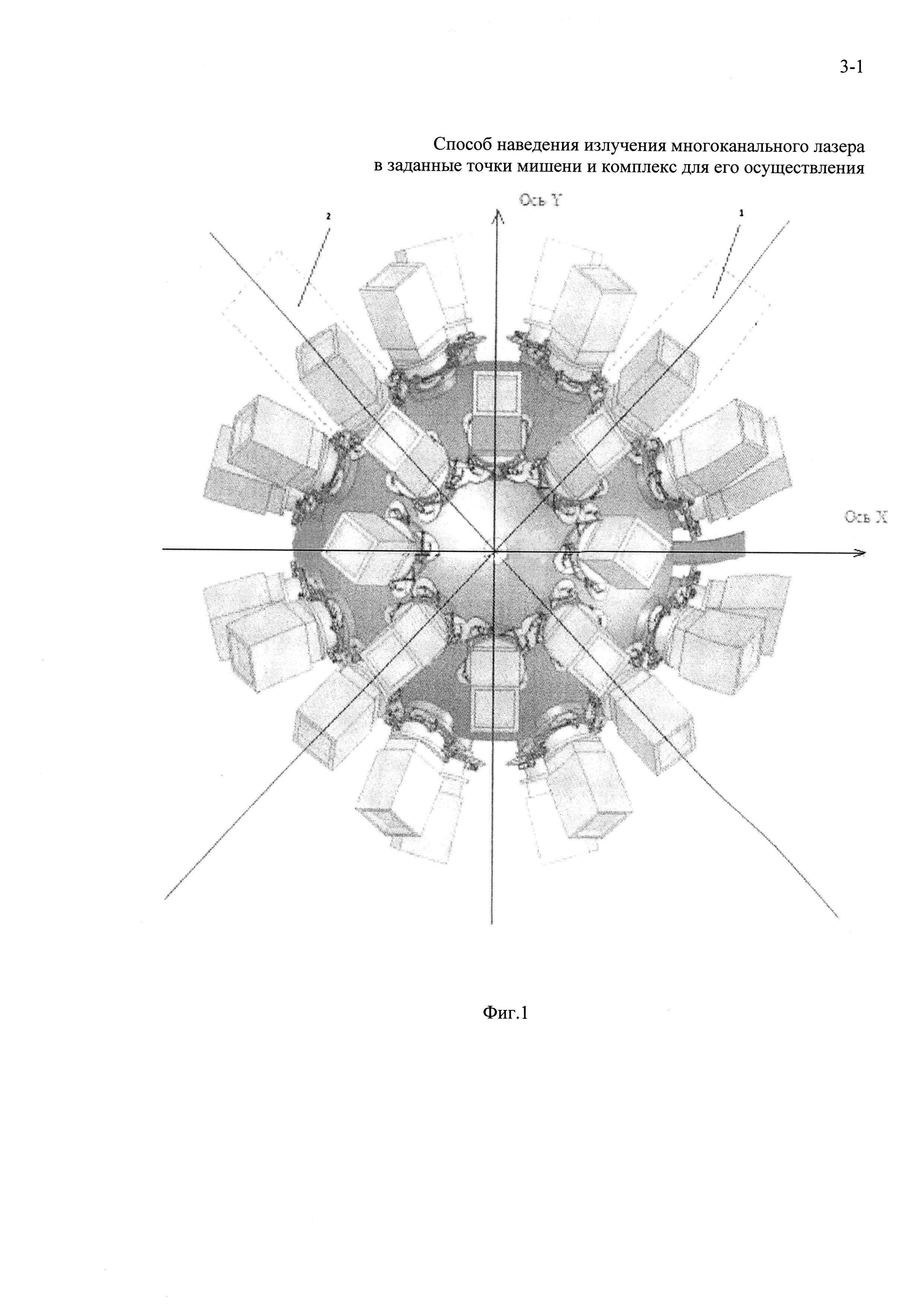
На фиг. 1 представлено размещение датчиков Д1-Д2 в экваториальной плоскости мишенной камеры, где 1 - Д1, 2 - Д2.
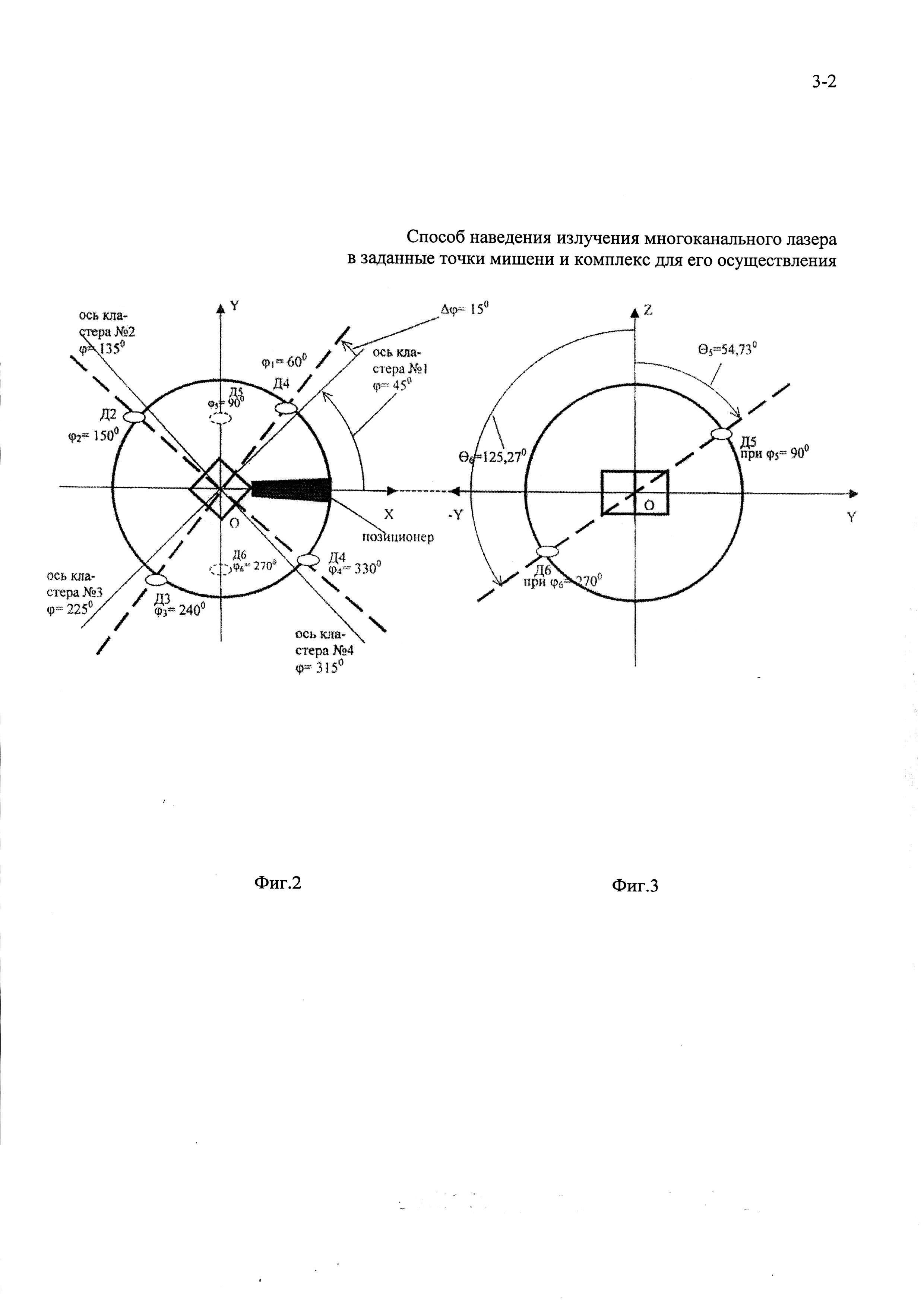
На фиг. 2, 3 - схема размещения всех датчиков Д1-Д6 вокруг мишенной камеры.
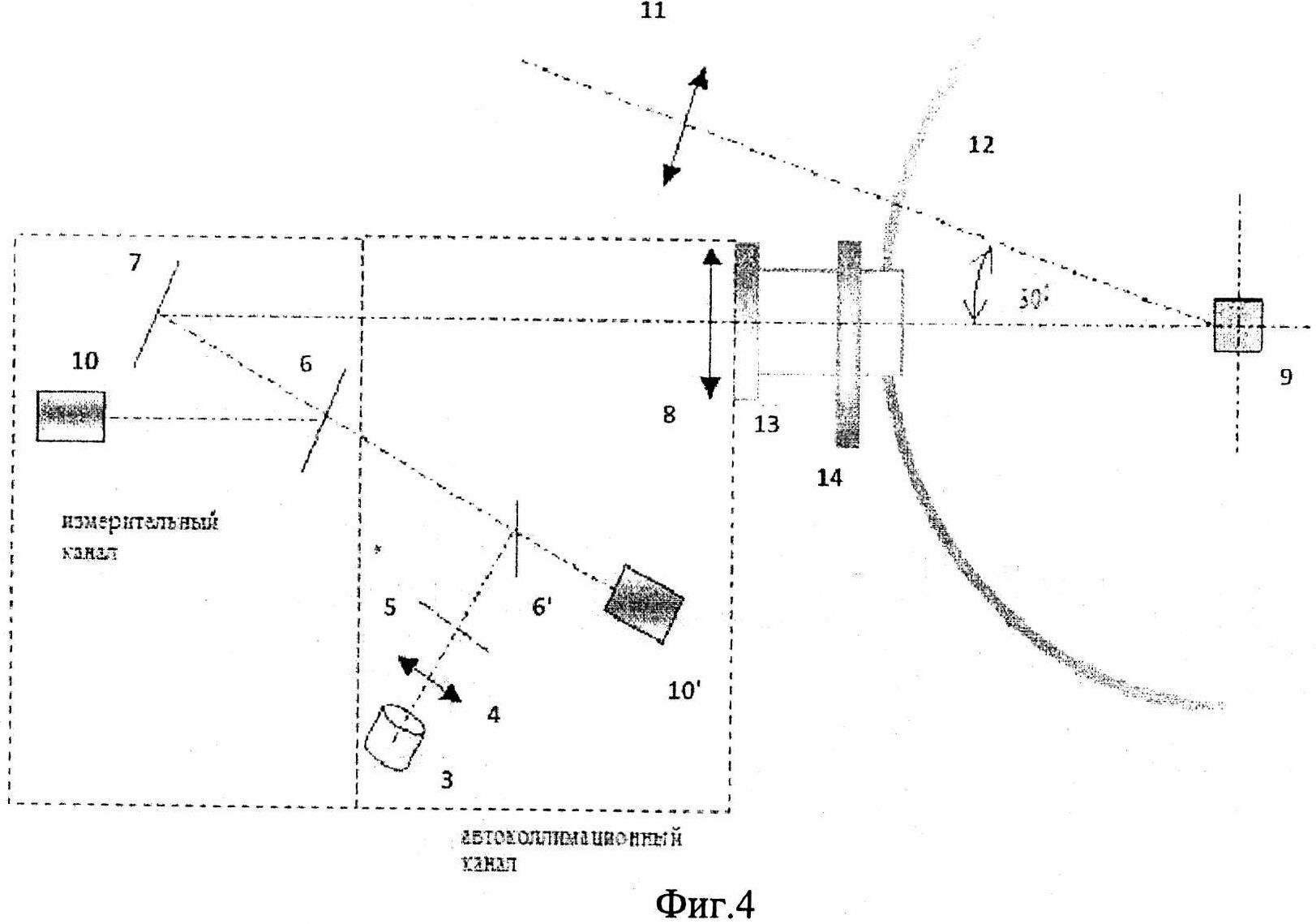
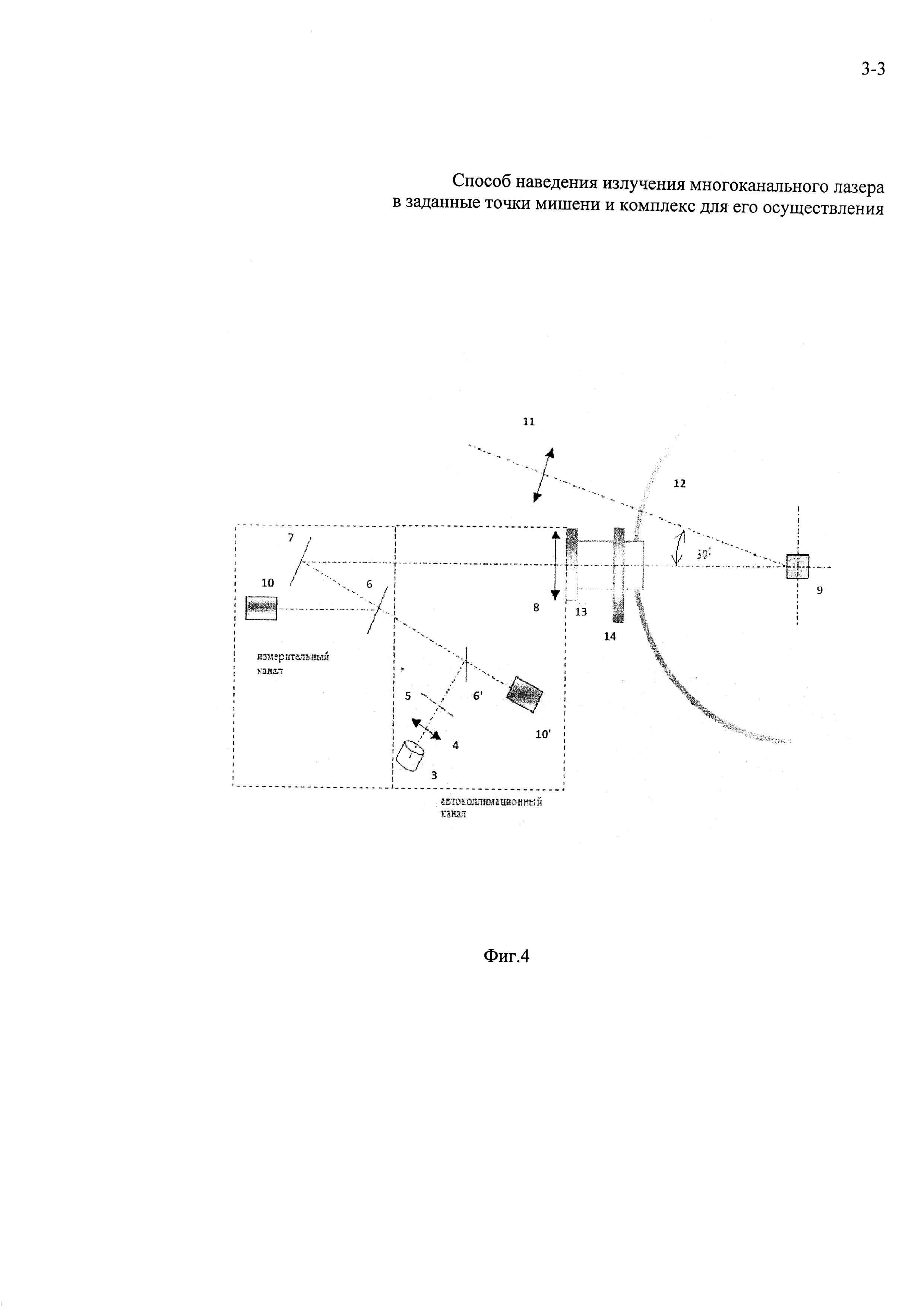
На фиг. 4 - принципиальная оптическая схема датчика, где: 3 - светодиод; 4 - конденсор; 5 - визирная сетка; 6, 6′ - светоделитель; 7 - зеркало; 8 - объектив; 9 - кубический имитатор мишени (или мишень); 10, 10′ - цифровая камера; 11 - объектив финального оптического модуля; 12 - стенка мишенной камеры; 13 - герметизирующая пластина; 14 - вакуумный затвор.
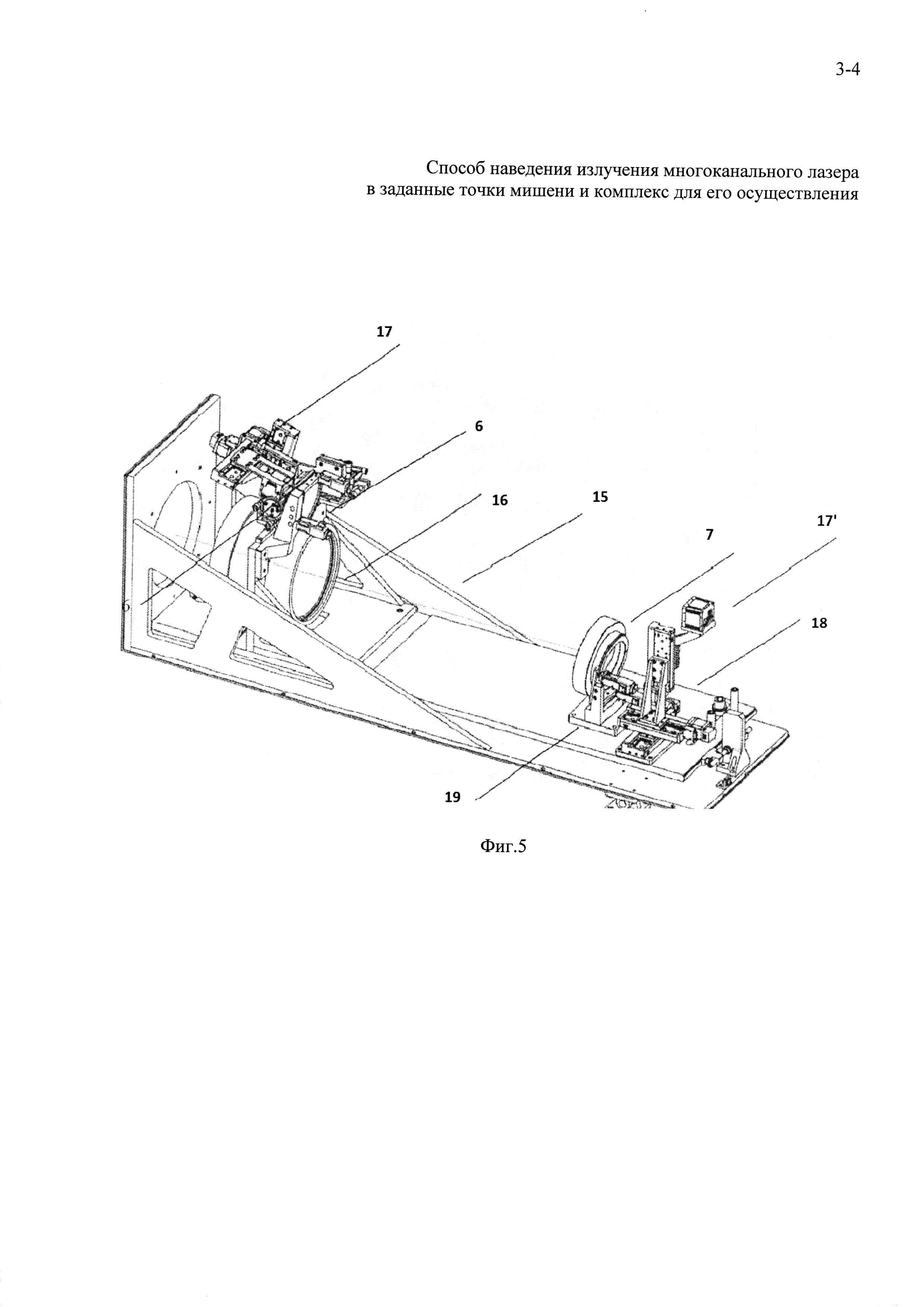
На фиг. 5 - конструкция датчика, где: 15 - корпус; 16 - узел объектива; 17, 17′ - фотоприемное устройство; 18 - транслятор; 19 - платформа.
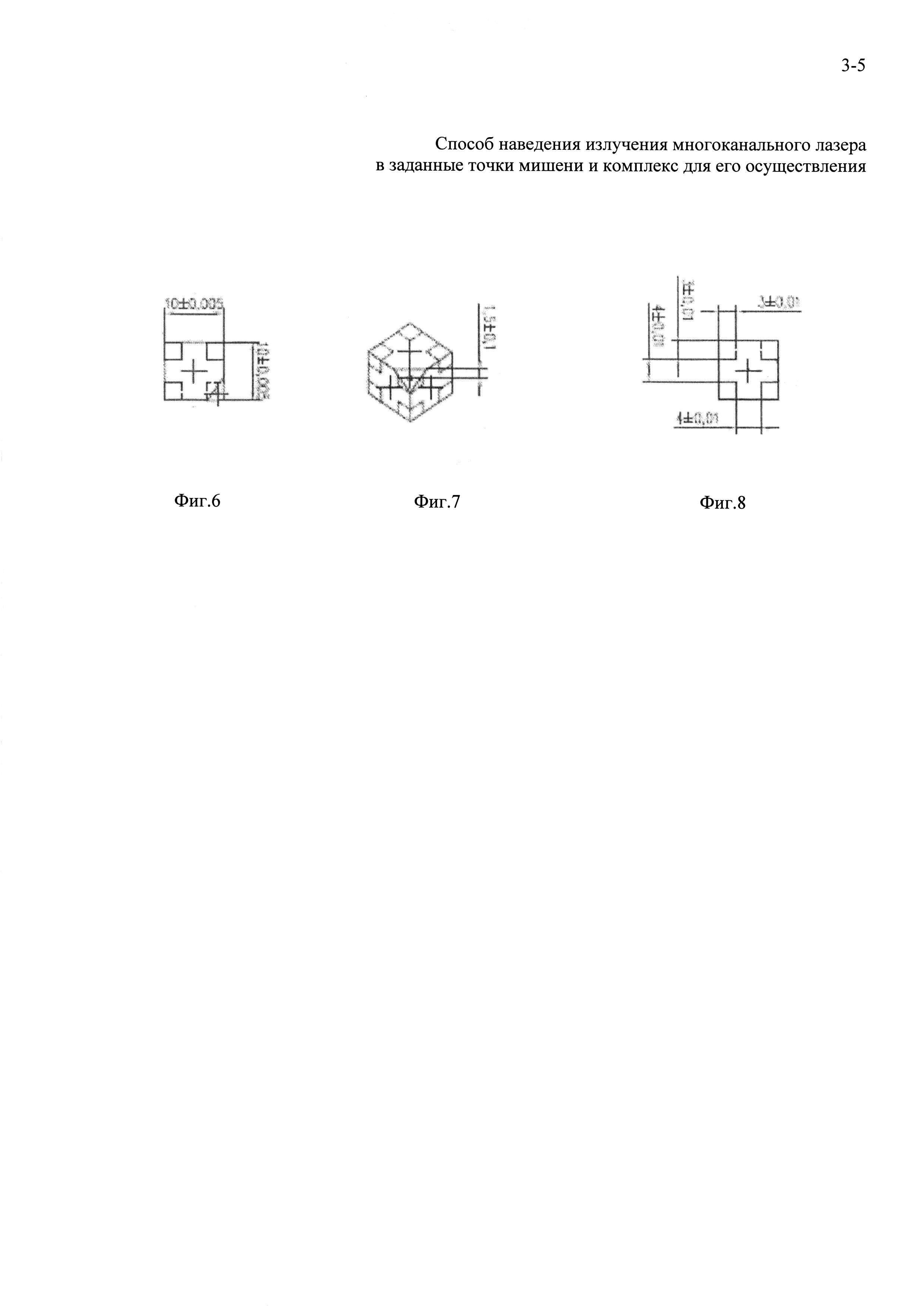
На фиг. 6-8 - кубический имитатор мишени.
В качестве конкретного примера выполнения заявленной группы изобретений может служить способ и комплекс для наведения излучения многоканальной лазерной установки (192 лазерных пучка) в заданные точки мишени с помощью кубических имитаторов мишени при наведении на мишень в кубической симметрии ее облучения.
В состав комплекса для наведения излучения 192 лазерных пучков в заданные точки мишени входят следующие контрольно-измерительные приборы.
Датчики Д1-Д6 - 6 шт., из них 4 шт. расположены ортогонально в горизонтальной (экваториальной) плоскости мишенной камеры и 2 шт. под углами к вертикальной оси мишенной камеры, проходящей через полюса камеры, (в сферической системе координат под углами θ5=54,73°; θ6=125,27° (фиг. 1, 2, 3)). Каждый из датчиков (фиг. 4 и 5) содержит коллиматор со световым диаметром линзового объектива порядка D=300 мм и задним фокальным отрезком f′=2236 мм, излучатель и приемник, работающие на длине волны 530 нм. Датчики регистрируют различные объекты с разрешением не менее 20,0 мкм (3-4 пикселя ПЗС приемника) в пространстве предметов вблизи центра мишенной камеры. Это отверстия диаметром около 1 мм в имитаторе мишени, размещенном в центральной зоне камеры размером не менее 100×100×100 мм. Кроме того, путем регистрации оптических меток на гранях имитатора мишени (в виде перекрестия, равнояркого круга или отверстия на отражающих или рассеивающих элементах граней) датчики Д1-Д6 регистрируют ориентацию имитатора мишени относительно выбранной системы координат, связанной с центром мишенной камеры. Кроме этой функции датчики Д1-Д6 с требуемой точностью регистрируют теневые картины мишени (ее профили) при ее юстировке.
Кубический имитатор мишени (КИМ1 и КИМ2) - 2 шт. КИМ1 предназначен для определения координат центра мишенной камеры и предварительного сведения пучков, представляет собой куб с размером ребра 40 мм, в качестве маркера на каждой грани куба с диффузно отражающим покрытием нанесена прямоугольная сетка с размером ячейки 5,0×5,0 мм. КИМ 2 предназначен для точного сведения и фокусировки пучков в отверстия мишени и представляет собой куб с размером ребра 10 мм, на каждой грани куба в ее центре имеется оптическая метка (перекрестие) и отверстие диаметром порядка 0,3 мм. При этом каждая грань куба на КИМ 2 имеет две области - центральную с матовой поверхностью и периферийную с зеркальной поверхностью (фиг. 6-8).
Зеркальный прямоугольный параллелепипед с оптическими метками крепят на бокс-конверторе с рабочей мишенью и используют при юстировке мишени.
Источники (волоконные) непрерывного излучения с рабочей длиной волны λраб=527 нм в фокальной плоскости выходных линз транспортного пространственного фильтра (ТПФ) - 192 шт. Эти источники могут использоваться с немного отличной от 527 нм длиной волны излучения (например, 530 нм), что позволяет при соответствующем выборе спектральной характеристики зеркал системы транспортировки снизить потери при транспортировке юстировочного пучка к мишенной камере и одновременно защитить силовой усилитель от отраженного от мишени излучения 527 нм.
Источники слабого импульсного излучения предусилителей, сцентрированные с выходными пинхолами ТПФ (192 шт.). Источник размещен на трехкоординатном моторизованном трансляторе.
Способ юстировки и точного наведения лазерных пучков на заданные точки мишени различного типа с помощью кубических имитаторов мишени и датчиков включает следующие операции.
Осуществляют предварительную монтажную юстировку источника юстировочного излучения λраб в фокусе для λраб=527 нм выходной линзы ТПФ по трем координатам, которая заключается в совмещении (сшивке) пучка по кривизне и направлению с импульсным рабочим излучением λраб. Совмещение сфокусированных пучков регистрируют вблизи центра мишенной камеры 12 с помощью КИМ1 9 и производится путем перемещения источника λраб в ТПФ с помощью трехкоординатного транслятора. Импульсный рабочий пучок должен быть достаточно слабым, чтобы не разрушить имитатор 9. Сшивка пучков производится при начальной сборке, замене элементов и периодически (1 раз в неделю) при вакуумировании ТПФ и мишенной камеры 12. При дальнейшей работе системы юстировки в автоматическом режиме источник λраб вбрасывается в найденную точку ТПФ с помощью дополнительного моторизованного транслятора или по одной из координат указанного выше трехкоординатного транслятора.
Осуществляют предварительную монтажную юстировку иллюминаторов мишенной камеры 12 с использованием вспомогательных устройств (лазерных трекеров - теодолитов и дальномеров) для определения реального положения, размеров и центров их в мишенной камере 12 для установки Д1-Д6, выверки осей Д1-Д6 с осями иллюминаторов камеры 12, определения расстояния между оптическими элементами соосных Д1-Д2, Д3-Д4, Д5-Д6, размера камеры и расстояний между базовыми поверхностями при установке и юстировке Д1-Д6.
Осуществляют юстировку датчиков Д1-Д6 (6 шт.) и КИМ1, целью которой является совмещение оптических осей датчиков Д1-Д6 с осями XYZ координатной системы мишенной камеры 12. Выполняется 1 раз на этапе сдачи-приемки всей системы, затем проверяется с периодичностью 1-2 раза в месяц.
Затем определяют центр мишенной камеры 10. Для этого необходимо установить на штатные места два датчика Д1 и Д2, ортогонально размещенных в горизонтальной плоскости МК. Затем оси датчиков Д1 и Д2 установить по нормали к граням кубического имитатора мишени КИМ1 9 (автоколлимационный блик должен быть в центре матрицы приемника 17 автоколлимационного канала для угловых измерений). Сфокусировать измерительный канал датчиков Д1 и Д2 на поверхность кубического имитатора мишени КИМ1 9. Смещением датчиков Д1 и Д2 совместить изображение центра сетки 5 на грани кубического имитатора мишени КИМ1 (центра куба) с центром матрицы приемника. Зафиксировать и сохранить значения линейных и угловых координат центра МК для Д1 и Д2.
Затем аналогично выполняют процедуру фиксации центра мишенной камеры для датчиков Д3 и Д4 в горизонтальной плоскости МК.
Для датчиков Д5 и Д6 вблизи верхнего и нижнего полюсов МК 12 требуемое месторасположение оптической оси Д5 и Д6 не совпадает с осью соответствующих кластеров в полюсах МК и имеет координаты: для датчика Д5: ρ5=6900 мм; φ5=90°; θ5=54,73°; для датчика Д6: ρ6=6900 мм; φ6=270°; θ6=125,27°. Для определения и фиксации центра мишенной камеры 12 для датчиков Д5 и Д6 с последующей цифровой обработкой результатов необходимо выполнить следующие операции.
Установить вертикальные Д5 и Д6 соосно друг к другу и перпендикулярно посадочным (базовым) поверхностям иллюминаторов угловыми подвижками. Заклонить иллюминаторы в оправах при помощи датчиков Д5 и Д6 под углом 0,5° к оси для устранения паразитных бликов. Настроить (навести на резкость и свести в центр поля зрения) измерительный канал датчиков Д5 и Д6 на вершину и три грани кубического имитатора мишени КИМ1 9. Линейными и угловыми подвижками датчиков Д5 и Д6 поместить в центр матрицы датчика изображение вершины кубического имитатора мишени КИМ1 9 и получить проекции его видимых граней в виде правильного шестиугольника с центром матрицы этих датчиков. Зафиксировать и сохраняют значения линейных и угловых координат центра МК для датчиков Д5 и Д6.
Осуществляют грубую юстировку лазерных пучков в заданные 6 точек пространства камеры, соответствующие центру сетки 5 на гранях кубического имитатора мишени КИМ1 9, путем регистрации на Д1-Д6 оптических меток таким образом, чтобы центр сетки 5 на каждой грани куба КИМ1 совпадал с центром приемной площадки приемника соответствующего датчика Д1-Д6. Юстировочные пучки каждого канала фокусируют в центр приемной площадки (центр грани куба КИМ1) путем продольных перемещений фокусирующей линзы и угловых заклонов соответствующих зеркал системы транспортировки.
Осуществляют точную юстировку пучков в заданные 6 точек пространства камеры, соответствующие центрам отверстий кубического имитатора мишени КИМ2.
КИМ2 вводят устройством позиционирования мишени и юстируют механизмами мишенного узла (гексаподом) путем регистрации на всех датчиках оптических меток на гранях куба имитатора мишени КИМ2 таким образом, чтобы для датчиков Д1-Д4 изображения центра отверстия на соответствующей грани куба КИМ2 совпадали с центром приемной площадки приемника, а для датчиков Д5 и Д6 - соответствующие вершины КИМ2. Юстировочные пучки каждого канала фокусируют и сводят в центр каждой из шести граней куба КИМ2 путем продольных перемещений фокусирующей линзы и угловых заклонов соответствующих зеркал системы транспортировки.
По окончании юстировки лазерных пучков на КИМ2 и после проверки ее точности источник юстировочного излучения выводят в нейтральное положение, КИМ2 удаляется, и вводится мишень. Затем мишень юстируют с помощью датчиков Д1-Д6 и механизмов мишенного узла следующим образом.
Вариант 1. Сначала расчетным путем строят трехмерную модель мишени в отъюстированном положении в центре МК в электронной трехмерной модели МК (3D модели МК) и теневые изображения мишени для каждого датчика Д1-Д6. Затем реальную мишень юстируют с помощью устройства позиционирования мишени путем минимизации отклонения теневых изображений реальной мишени на датчиках Д1-Д6 по трем направлениям от теневых изображений (профилей), полученных из трехмерной модели мишени в 3D модели МК.
Вариант 2. Имитатор мишени КИМ2 заменяют на бокс-конвертор с рабочей мишенью, снабженный специальным узлом - зеркальным параллелепипедом, закрепленным на бокс-конверторе, с измеренными с высокой точностью (±2 мкм) его координатами относительно мишени (ее центра, отверстий на поверхности бокс-конвертора). Затем регистрируют двумя соответствующими ортогональными датчиками Д1-Д2 координаты этого параллелепипеда относительно центра МК. Вычисляют с помощью измеренных данных величины рассогласования положения мишени относительно точек пространства сведения сфокусированных лазерных пучков всех каналов. Рассогласование координат положения мишени отрабатывается (уменьшается до требуемой минимальной величины) с помощью гексапода и автоматизированной системы управления позиционированием мишени. После чего мишень выводиться в рабочее положение.
Т.о. заявляемая группа изобретений позволяет решить весь комплекс юстировочных задач, которые стоят при подготовке мишени к физическим экспериментам на многоканальной лазерной установке:
- определение, фиксация и воспроизведение координат центра сферической мишенной камеры;
- сведение и фокусировка пучков лазерных каналов в заданные точки в центральной области камеры;
- юстировка самой мишени.
Способ оценки кинетики образования наноразмерных пленок и изменения их оптических характеристик
Способ определения сплошности покрытия изделия
Интерферометр
Переход волоконно-оптический
Система параметрической гидролокации с функцией получения акустического изображения целей
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Двухдиапазонная микрополосковая антенна круговой поляризации
Сцинтилляционный материал на основе zno-керамики, способ его получения и сцинтиллятор
Способ оценки кинетики образования наноразмерных пленок и изменения их оптических характеристик
Способ определения сплошности покрытия изделия
Интерферометр
Переход волоконно-оптический
Система параметрической гидролокации с функцией получения акустического изображения целей
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Двухдиапазонная микрополосковая антенна круговой поляризации
Сцинтилляционный материал на основе zno-керамики, способ его получения и сцинтиллятор

