Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ В РАСПРЕДЕЛЕННОЙ СИСТЕМЕ АКУСТИЧЕСКОГО И ВИДЕОНАБЛЮДЕНИЯ
Вид РИД
Изобретение
Изобретение относится к ауди-видеограмметрии, т.е. электронной обработке аудио- и видеосигналов из различных источников для получения параллакса или информации о дальности для определения координат цели, распознавание цели и подачи управляющего сигнала на внешнюю систему для наведения ее на цель и активации и может быть использована в системах охраны от попадания птиц на летное поле аэродрома.
Известна публикация:
ГОУВПО «Воронежский государственный технический университет»
НАУКОЕМКИЕ ТЕХНОЛОГИИ И МАТЕРИАЛЫ (НТМ-2010)
Сборник трудов региональной научно-практической конференции студентов, аспирантов и молодых ученых,
г. Воронеж 1-2 декабря 2010 г.
-УДК 004.932.721 «ПРИМЕНЕНИЕ РАСПРЕДЕЛЕННОЙ СИСТЕМЫ ВИДЕОНАБЛЮДЕНИЯ ДЛЯ ЛОКАЛИЗАЦИИ ОБЪЕКТОВ». Авдюшина А.Е. Воронежский государственный технический университет
Структурно система состоит из центрального поста (сбора и обработки данных) и двух или более необслуживаемых периферийных постов (видеонаблюдения), объединенных в единую сеть. После разворачивания системы для работы с ней достаточно присутствия одного человека на центральном посту.
Периферийные посты отвечают за получение изображения, интересующего оператора сектора пространства. Каждый из этих постов представляет собой видеокамеру, закрепленную на поворотном устройстве, позволяющем поворачивать ее на 360 градусов в горизонтальной плоскости и на 180 градусов в вертикальной. Сигнал с выхода видеокамеры передается на центральный пост. Оттуда, в свою очередь, производится управление поворотным устройством.
Центральный пост представляет собой компьютер, снабженный большим монитором (или несколькими), позволяющим одновременно отображать изображения со всех периферийных постов системы, и мощный процессор, обеспечивающий вычисление местоположения, заинтересовавшего оператора объекта в реальном времени.
Связь между постами осуществляется по радиоканалу. Прототип.
Недостатком является невозможность распознавания птиц, расположенных в стае, системой управления видеокамерами на постах.
Наиболее близким аналогом является изобретение «СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ». RU. Патент №2078309. С1. МПК 6 G01C 11/04. Заявка: 4537427/28, 17.12.1990.
Для определения пространственных координат цели выбирают n опорных точек, визируют и фоторегистрируют цели и опорные точки из N точек с известными координатами, дешифрируют снимки, идентифицируют опорные точки, измеряют координаты опорных точек в системе координат, две оси которой лежат в плоскости фотоснимка, а третья перпендикулярна этой плоскости и проходит через центр фотоснимка, и вычисляют пространственные координаты цели по априорно известным координатам опорных точек и по измеренным координатам тех же опорных точек. Для повышения точности определения координат дополнительно измеряют направляющие косинусы для каждой точки наблюдения между линиями визирования на опорные точки и между направлениями, проходящими через заднюю главную точку фоторегистратора и изображения опорных точек, сравнивают их между собой и на величину полученной разницы компенсируют измеренные направляющие косинусы между направлениями, проходящими через заднюю главную точку фоторегистратора и изображения цели и опорных точек, а затем определяют по скомпенсированным значениям направляющих косинусов и известным направлениям на опорные точки пространственные координаты объекта как точку пересечения прямых круговых конусов, вершина каждого из которых совпадает с точкой наблюдения, а угол полураствора равен углу между направлениями на цель и опорную точку.
Недостатком является невозможность распознавания птиц, расположенных в стае, система управления видеокамерами на постах.
Известен «СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА». RU. Заявка №2010148360
(13). МПК G01S 3/14 (2006.01).
Способ определения пространственных координат подвижного объекта, включающий излучение сигналов, прием и обработку их на объекте с последующим расчетом пространственных координат объекта, отличающийся тем, что дополнительно учитывают погрешности координат, вызванные рефракцией сигналов, излучаемых известной радионавигационной системой спутника при прохождении сигналов в различных слоях атмосферы, для чего определяют координаты мнимого положения спутника, сравнивают с координатами реального положения спутника и рассчитывают погрешности этих координат, после чего вычисляют координаты подвижного объекта и корректируют эти координаты с учетом погрешностей положения спутника, учитывая, что погрешности в определении координат положения спутника такие же, как и для подвижного объекта.
Недостатком является не возможность распознавания птиц расположенных в стае система управления видеокамерами на постах.
Техническим результатом является: автоматизация процесса определения пространственных координат природных объектов и распознавание птиц.
Технический результат достигается тем, что вместе с камерами установлены узконаправленные акустические микрофоны, причем они сонаправлены по направлению с камерами видеонаблюдения периферийных постов и устанавливают на поворотных устройствах с дистанционным управлением, ориентируют камеры в двух плоскостях, получают изображение и звук голоса птиц в реальном времени, подают изображение и звук на ПЭВМ центрального поста, где после обработки изображения программой происходит распознавание объекта и расчет его координат, затем подают команду слежения на поворотное устройство камер с узконаправленными акустическими микрофонами. И для достижения технического результата в этом случае используются следующие компоненты: система оптической локализации природных объектов, состоящая из периферийных постов акустического и видеонаблюдения и центрального поста управления и обработки данных; активная система отпугивания птиц с возможностью внешнего управления; специальное программное обеспечение, отвечающее за распознавание птиц на изображениях и по звуку голосов с камер и микрофонов центральных постов, определение их координат и управление внешней системой отпугивания с целью ее наведения и активации.
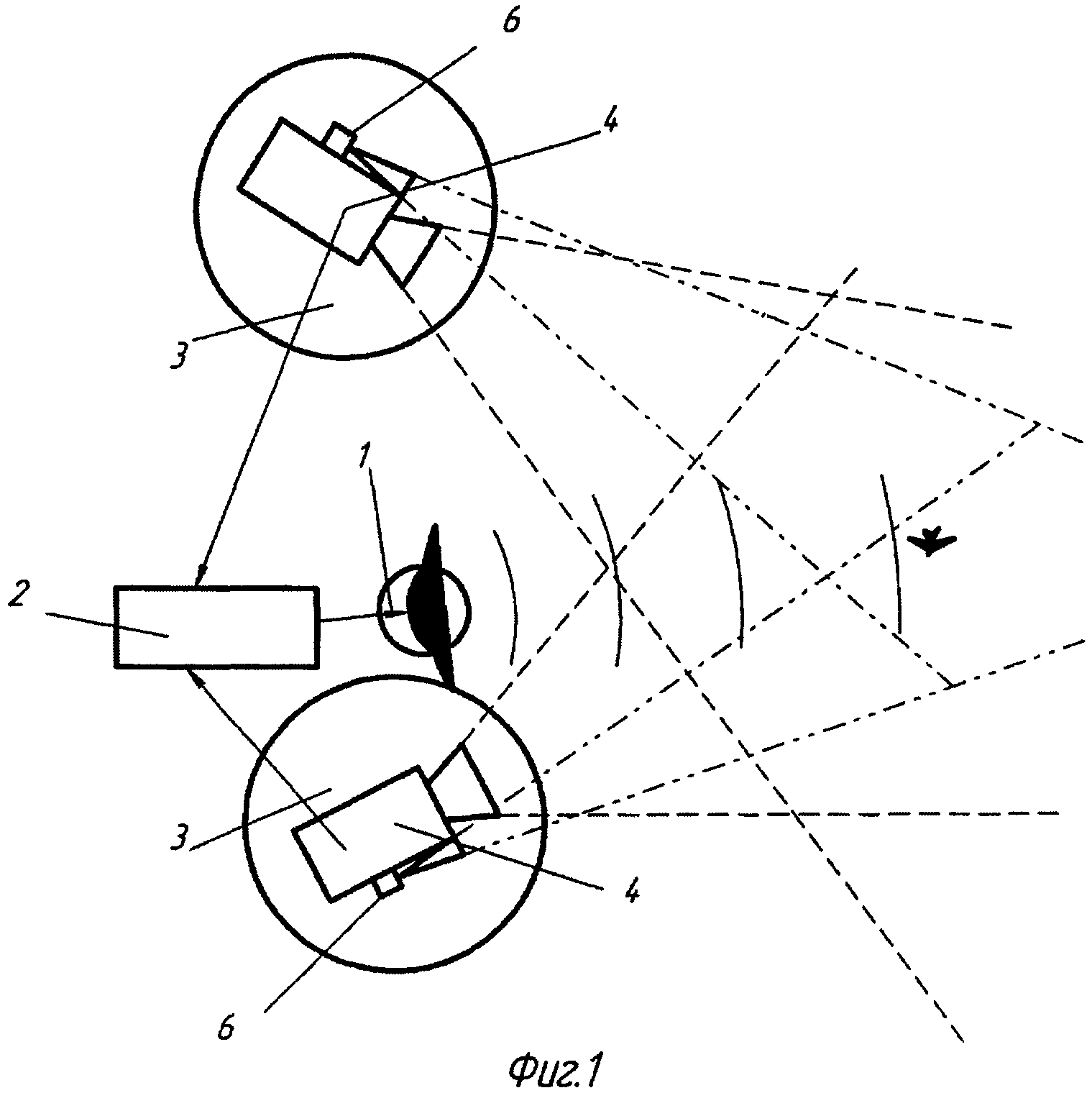
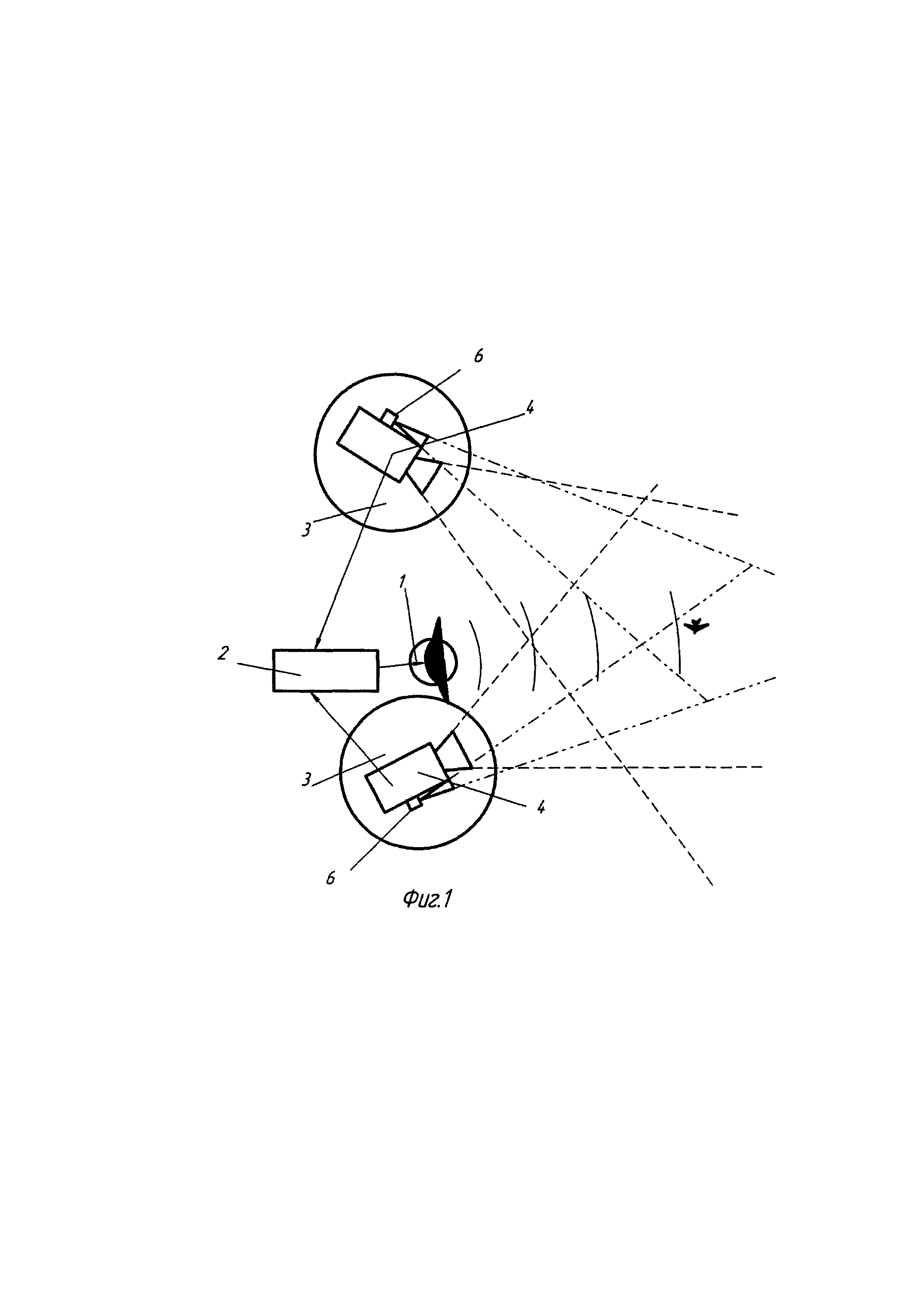
На Фиг. 1 изображена схема принципа действия устройства, для примера, подключенного к активной системе отпугивания птиц.
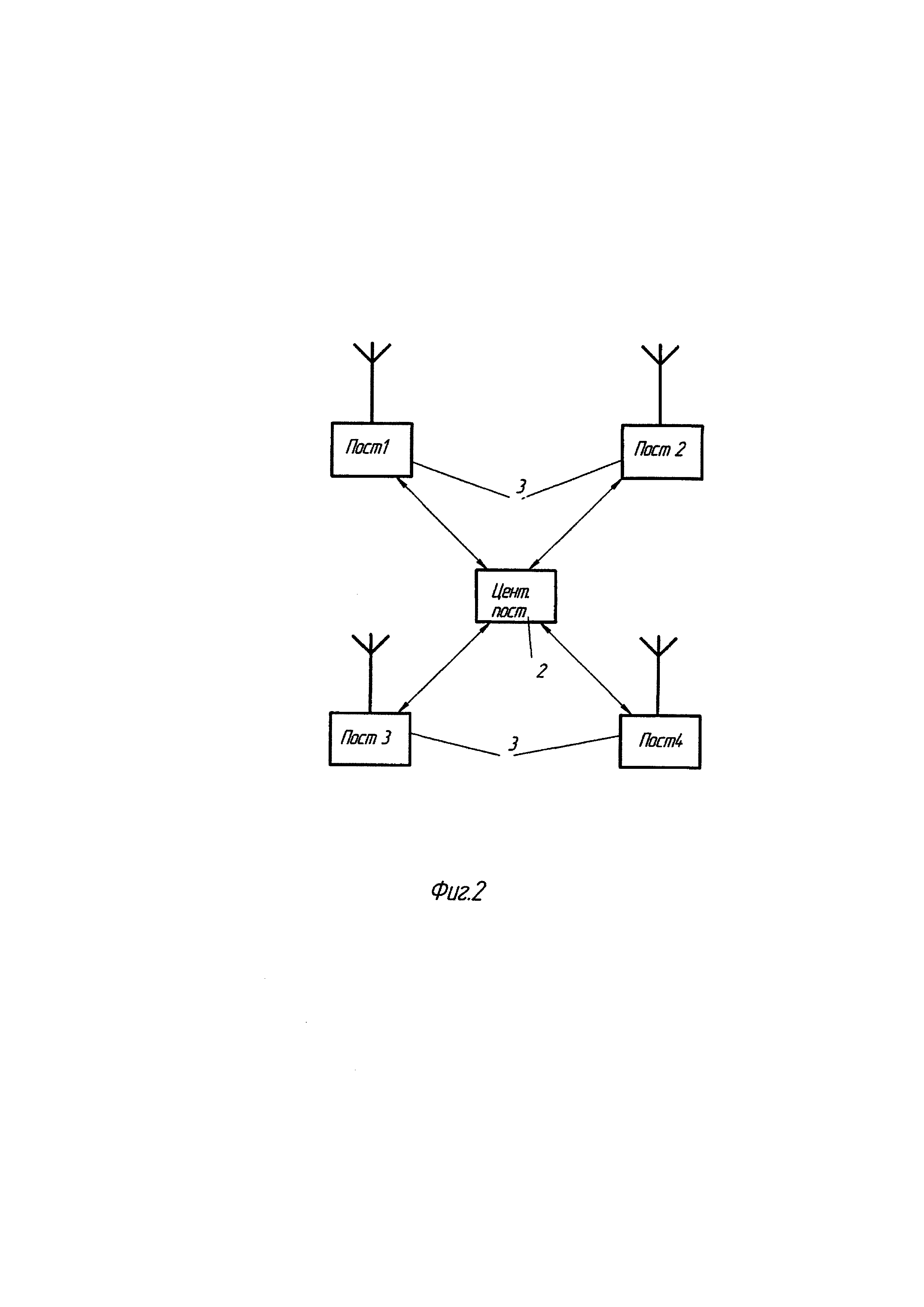
На Фиг. 2 изображена структурная схема системы.
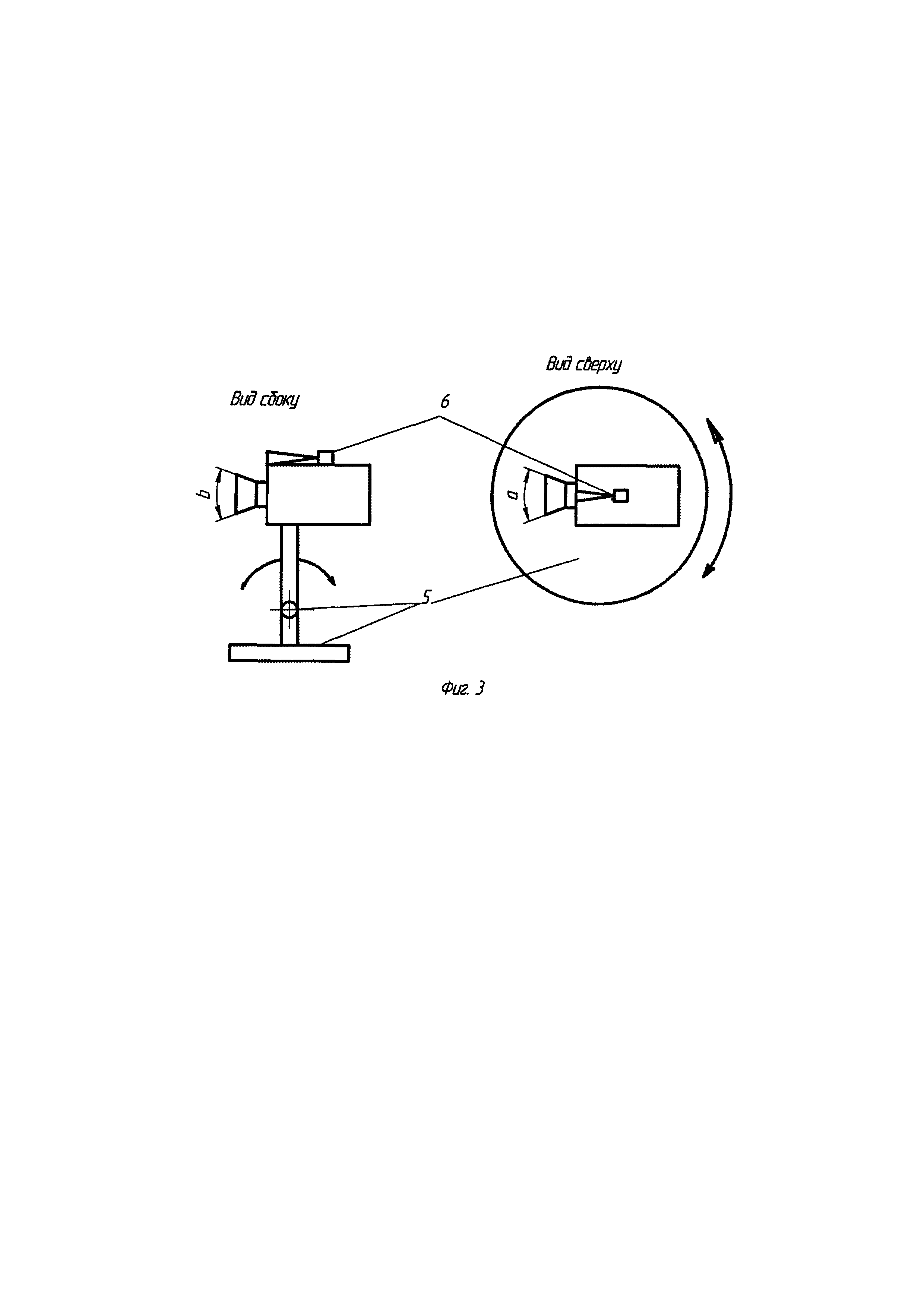
На Фиг. 3 изображено схематичное изображение видеокамеры и микрофонов периферийного поста.
На Фиг. 4 изображено рекомендуемое расположение периферийных постов относительно контролируемой территории.
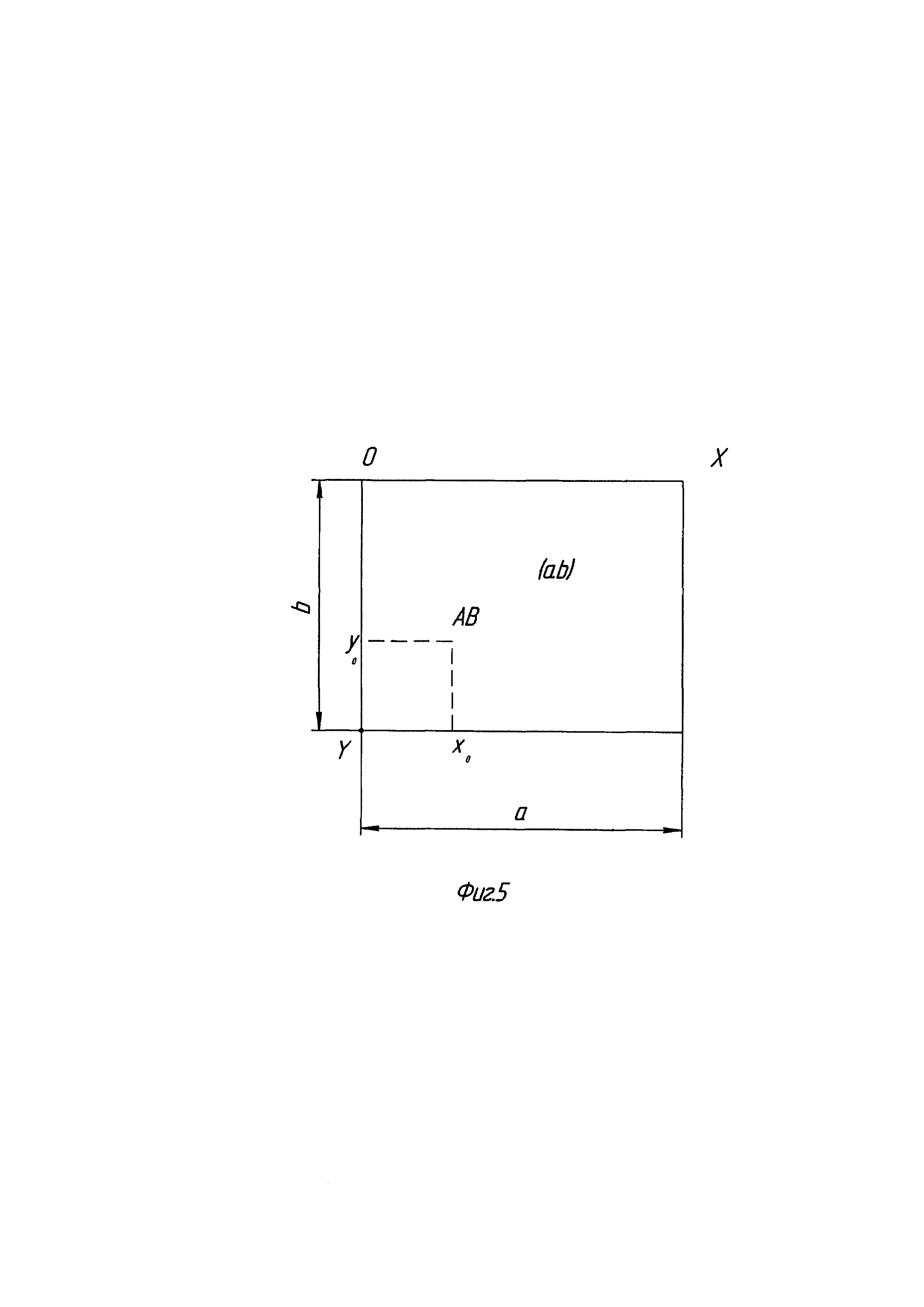
На Фиг. 5 изображено определение направления на любой объект на передаваемом изображении с периферийного поста.
«Устройство для измерения координат и распознавание объектов в распределенной системе акустического и видеонаблюдения» (в дальнейшем «устройство») изображено на схеме (Фиг. 1) и работает следующим образом. В состав устройства входят основной пост, процессор, периферийные посты с видеокамерами, узконаправленными микрофонами, с устройствами поворотными, средства связи между постами и процессором, причем центральный пост может быть совмещен с одним периферийным постом. Устройство обычно совмещено с активной системой отпугивания птиц (1) на авиационных объектах (Фиг. 1). Структура системы оптической, акустической локализации состоит из центрального поста (2) управления и обработки данных и двух или более необслуживаемых периферийных постов (3) аудио- и видеонаблюдения, объединенных в единую сеть (Фиг. 2). После разворачивания системы для работы с ней достаточно присутствия одного человека на центральном посту.
Периферийные посты (3) отвечают за получение акустического сигнала и изображения интересующего оператора сектора пространства. Каждый из этих постов (3) представляет собой видеокамеру (4) и узконаправленный микрофон (6), закрепленную на управляемом поворотном устройстве (5), позволяющем поворачивать ее на 360 градусов в горизонтальной плоскости и на 180 градусов в вертикальной (Фиг. 3). Акустический и видеосигнал с выхода микрофона (6) и видеокамеры (4) передается на центральный пост (2), который производится управление поворотным устройством (5).
Центральный пост (2) устройства представляет собой процессор (не показан), снабженный, как правило, одним и более монитором (не показан), позволяющим одновременно выводить изображения со всех периферийных постов системы, и процессором, обеспечивающим вычисление местоположения и распознавание птиц по голосу заинтересовавшего оператора объекта в реальном времени. К этому же процессору подключается устройство управления системой отпугивания птиц (1).
Связь между постами (3) и процессором в устройстве осуществляется по проводам или радиоканалу. Как правило, применяется система широкополосной связи семейства стандартов IEEE 802.11 (Wi-Fi). Использование данного оборудования позволяет организовать беспроводную сеть с необходимой для передачи видеопотока пропускной способностью. При подключении специальных усилителей и направленных антенн такая сеть может обеспечить передачу данных на расстояние в несколько километров в условиях прямой видимости.
Изображение и голос птиц с периферийных постов (3) устройства передается на процессор центрального поста (2), на котором установлено специальное программное обеспечение системы устройства и позволяет выводить изображение со всех периферийных постов системы, а также анализировать его в автоматическом режиме. При появлении в контролируемой зоне интересующего объекта (птицы) программное обеспечение распознает его по акустическому сигналу голосу птиц и видеоизображению передаваемых камерами (4) периферийных постов (3), и производит определение его координат.
Принцип работы системы локализации в устройстве.
В ее состав должно входить минимум два периферийных поста (3). При этом в состав каждого поста (3) входит узконаправленный акустический микрофон (6) видеокамера (4), характеризующаяся углами обзора по горизонтали и по вертикали (обозначим их α и β соответственно). Периферийные посты (3) располагают таким образом, чтобы секторы выводимого ими изображения перекрывались (фиг.4).
За нулевое направление в горизонтальной плоскости принимают направление на север, а в вертикальной плоскости - направление, параллельное плоскости земли. Таким образом, в каждый момент времени видеосъемки известно, в какую сторону направлена видеокамера (4) наблюдения. Это позволяет определить направление на любой объект на передаваемом с периферийного поста (3) изображении (фиг. 5).
Расчет направления на объект производится по формулам:
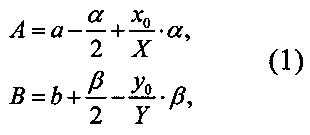
где x0 и y0 - координаты центра объекта на передаваемом изображении;
a и b - азимут и угол места направления центра видеокамеры поста;
X и Y - размеры передаваемого с поста изображения по горизонтали и вертикали соответственно;
А и В - азимут и угол места направления на объект, соответственно.
Рассчитанное направление на наблюдаемый объект является его оптическим пеленгом в трехмерном пространстве. Расчет местоположения объекта и его высоты по двум или более пеленгам на него от устройства с известными координатами широко известен в радиолокации и навигации, методом триангуляции как на плоскости, так и на сфере.
Таким образом, приведенная система позволяет определять координаты интересующего объекта на контролируемой территории.
После определения координат цели и распознавания птиц по голосу и видеоизображению программное обеспечение поста управления в составе устройства производит наведение системы отпугивания птиц и ее активацию.
Технико-экономические показатели изготовленного устройства значительно превосходят показатели прототипа.
Перечень позиций
1. - Активная система
2. - Центральный пост
3. - Периферийный пост
4. - Видеокамера
5. - Поворотное устройство
6. - Узконаправленный микрофон
Устройство для измерения координат и распознавания объектов в распределенной системе аудио- и видеонаблюдения, имеющее в составе распределенные системы камеры видеонаблюдения на периферийных постах и связанный с ними центральный процессор для определения координат объекта по изображениям с них, отличающееся тем, что акустические узконаправленные микрофоны сонаправлены и расположены вместе с камерами видеонаблюдения периферийных постов и микрофоны с камерами устанавливают на поворотных устройствах с дистанционным управлением, причем камеры и микрофоны ориентируют в двух плоскостях и получают звук и изображение в реальном времени, передают голос птиц и их изображение по проводам или радиоканалу на процессор центрального поста, где после обработки звука и изображения, распознавания объекта и расчета его координат с центрального поста подают команду слежения на поворотное устройство микрофонов и камер.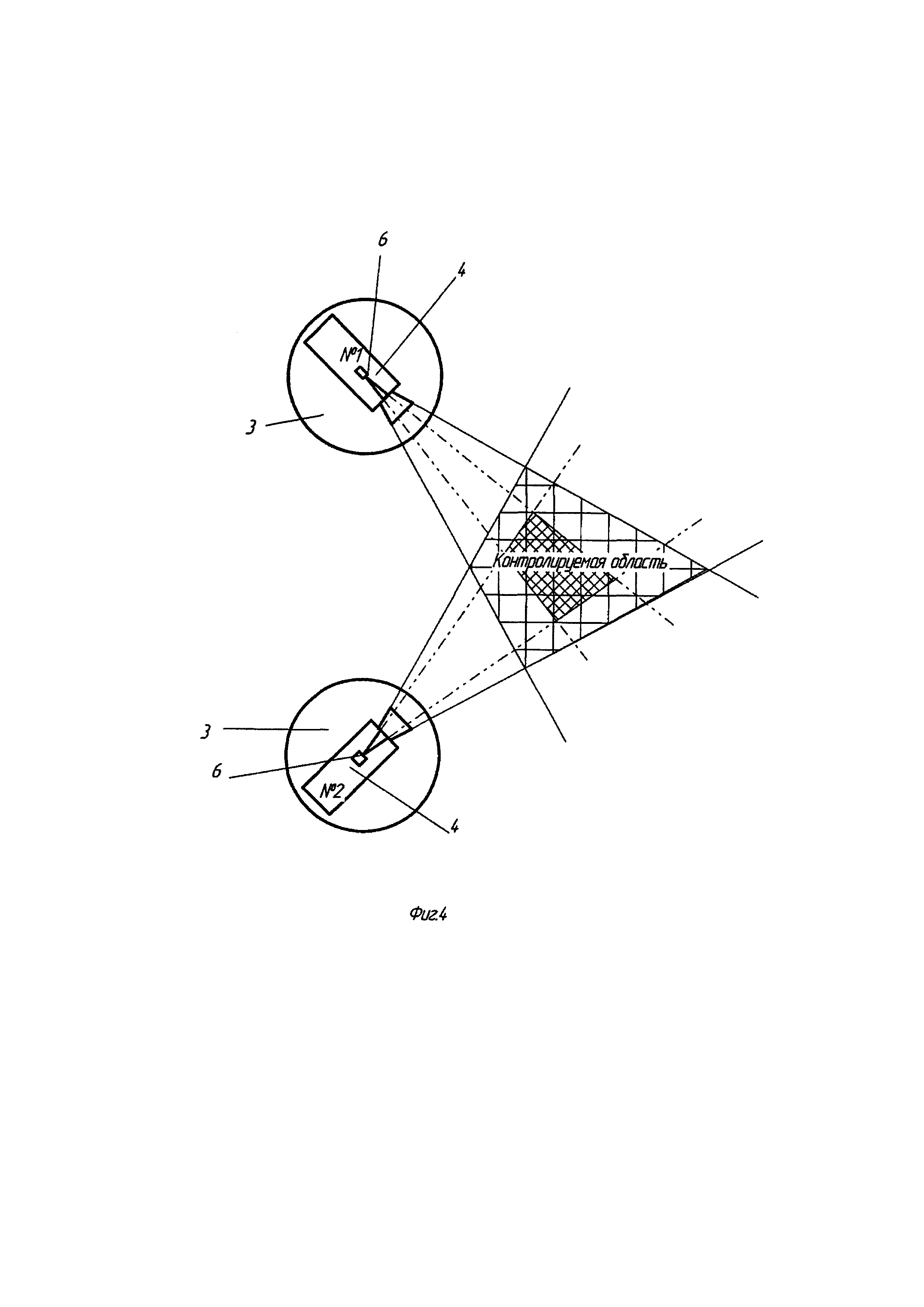
Аккумулятор водорода
Способ получения сплава с нарушенной структурой для аккумуляторов водорода.
Способ получения сплава ni-b с дефектами структуры, используемого в качестве аккумулятора водорода
Применение электролитического расплава для получения сплава ni-в для аккумуляторов водорода
Устройство для изменения траектории космических объектов
Устройство для изменения траектории астероида, ядра кометы и других космических объектов
Ударное ядро с зажигательным сердечником
Ударное ядро с зажигательным эффектом
Аккумулятор водорода
Способ получения сплава с нарушенной структурой для аккумуляторов водорода.
Способ получения сплава ni-b с дефектами структуры, используемого в качестве аккумулятора водорода
Применение электролитического расплава для получения сплава ni-в для аккумуляторов водорода
Устройство для изменения траектории космических объектов
Устройство для изменения траектории астероида, ядра кометы и других космических объектов
Ударное ядро с зажигательным сердечником
Ударное ядро с зажигательным эффектом

