Результат интеллектуальной деятельности: ЭЛЛИПТИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ПОДШИПНИКА И СПОСОБ МАНИПУЛИРОВАНИЯ ПОДШИПНИКОМ
Вид РИД
Изобретение
[0001] В аспектах настоящего изобретения предлагается устройство и способ манипулирования крупногабаритным механическим объектом и его поддержки. В частности, изобретение относится к эллиптическому манипулятору для подшипника, предназначенному для поддержки подшипника и манипулирования им.
[0002] Подшипники используются в разных областях техники для обеспечения возможности ограниченного относительного движения между деталями при вращении. У пользователей часто возникает необходимость наварить защитный, более мягкий слой металла на внутреннюю поверхность подшипника для дополнительной защиты движущихся деталей при вращении. Например, на поверхность подшипника наваривают сплав, содержащий композиционный материал с металлической матрицей и известный под названием баббит. Наварка баббита на крупногабаритный подшипник, (например, на подшипник, используемый в турбомашине), является трудоемкой физической операцией, поскольку оператору приходится манипулировать подшипником для его установки в положение для наварки, как правило, при помощи крана. После выполнения каждого этапа наварки необходимо заново устанавливать подшипник для выполнения следующего этапа. Для каждой последующей установки оператору приходится тянуть или толкать подшипник, обеспечивая необходимое для наварки положение. С учетом больших габаритов и массы подшипников для каждой такой установки требуется кран и специальное оборудование. Кроме того, в известных системах, обеспечивающих поддержку подшипников, необходимо, как правило, модифицировать подшипник для его установки в таких системах.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Предлагается манипулятор для подшипника, предназначенный для поддержки подшипника и манипулирования им. В одном варианте выполнения изобретения указанный манипулятор содержит раму,. имеющую по меньшей мере один регулируемый ролик для поддержки подшипника и по меньшей мере один регулируемый рычаг для закрепления подшипника на раме. Манипулятор также содержит двигатель, предназначенный для пошагового поворота подшипника. В одном варианте выполнения двигатель соединен с указанным по меньшей мере одним регулируемым рычагом, который, в свою очередь, поворачивает подшипник. Угол, на который подшипник каждый раз поворачивается, может соответствовать ширине навариваемого материала, наносимого на подшипник. Таким образом, подшипник может поворачиваться пошагово, обеспечивая тем самым наваривание материала на всю внутреннюю поверхность подшипника.
[0004] Первый аспект изобретения относится к эллиптическому манипулятору для подшипника, содержащему раму, которая содержит по меньшей мере один регулируемый ролик, выполненный с возможностью поддержки подшипника, по меньшей мере один регулируемый рычаг, выполненный с возможностью прикрепления к подшипнику, и двигатель, выполненный с возможностью пошагового поворота подшипника.
[0005] Второй аспект изобретения относится к способу манипулирования подшипником, включающему: использование рамы, предназначенной для поддержки подшипника и имеющей по меньшей мере один регулируемый ролик, выполненный с возможностью поддержки подшипника, и по меньшей мере один регулируемый рычаг, выполненный с возможностью прикрепления к подшипнику; установку подшипника на указанный по меньшей мере один регулируемый ролик; и использование двигателя для пошагового поворота подшипника.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Эти и другие признаки данного изобретения подробно раскрыты ниже при подробном описании различных аспектов изобретения с сопровождаемыми чертежами, на которых показаны различные варианты выполнения изобретения, а именно:
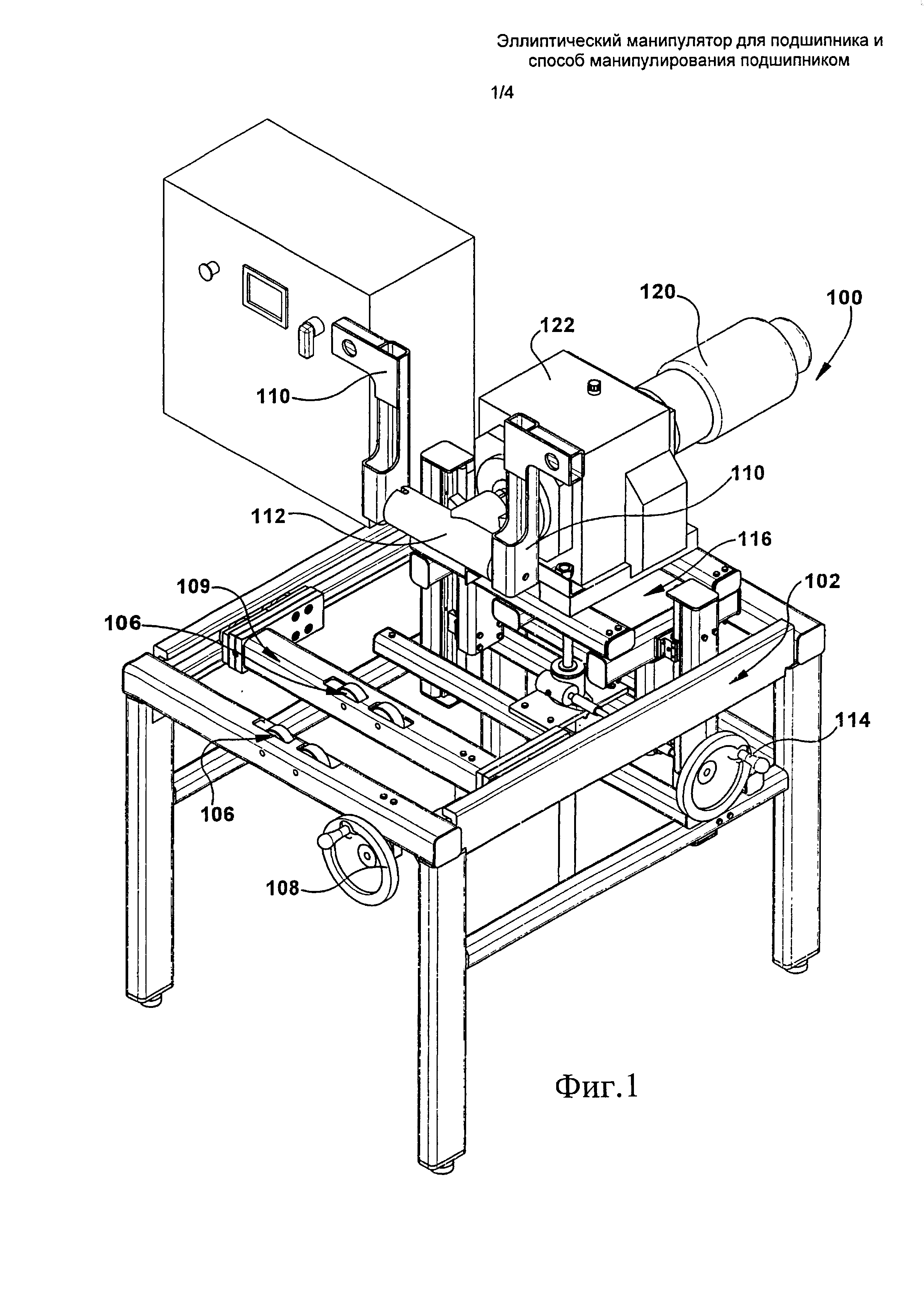
[0007] на Фиг.1 показан вид в аксонометрии манипулятора для подшипника согласно аспектам предлагаемого изобретения.
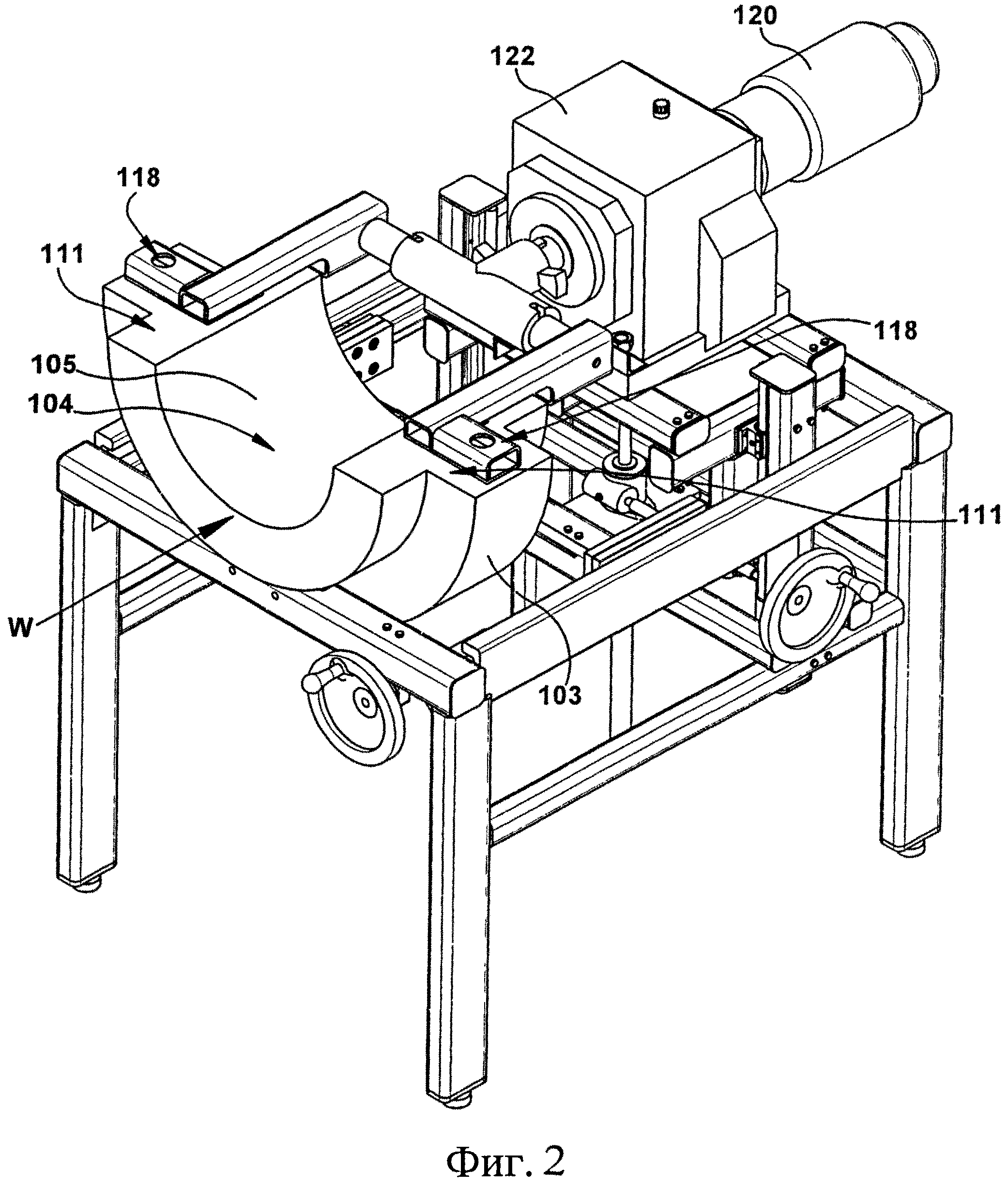
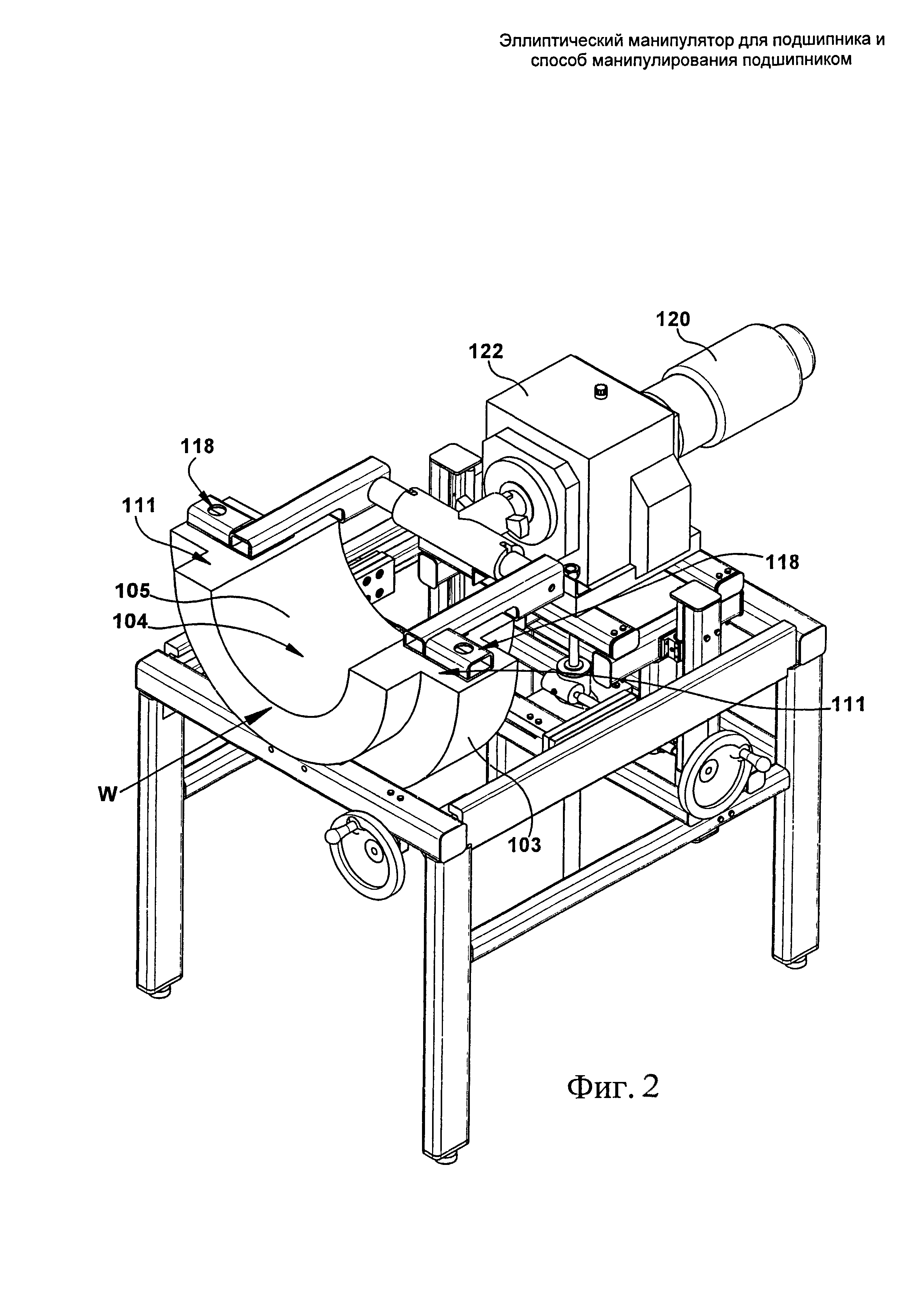
[0008] на Фиг.2 показан вид в аксонометрии манипулятора для подшипника вместе с установленным на нем подшипником согласно аспектам предлагаемого изобретения.
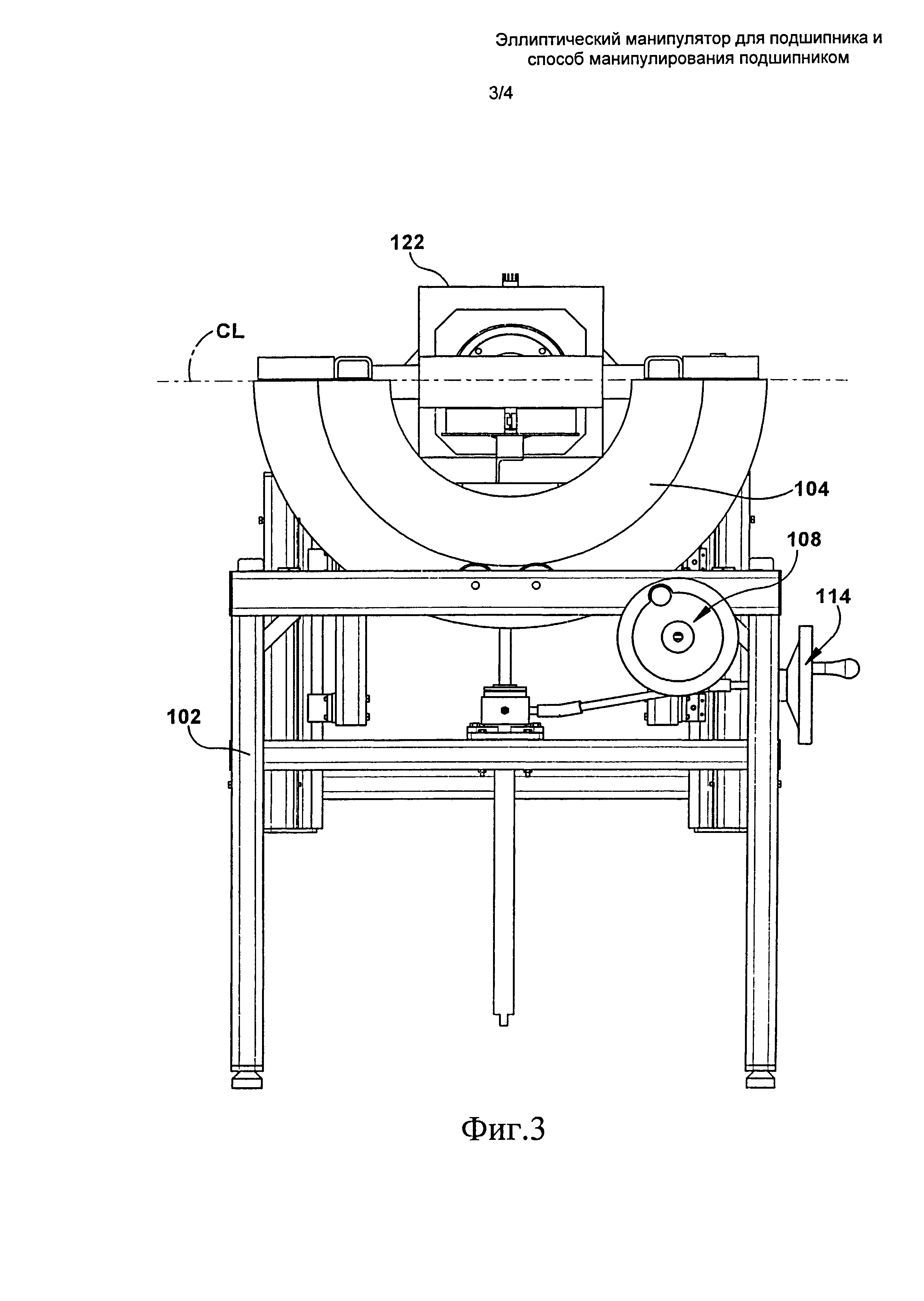
[0009] на Фиг.3 показан вид спереди манипулятора для подшипника вместе с установленным подшипником согласно аспектам предлагаемого изобретения.
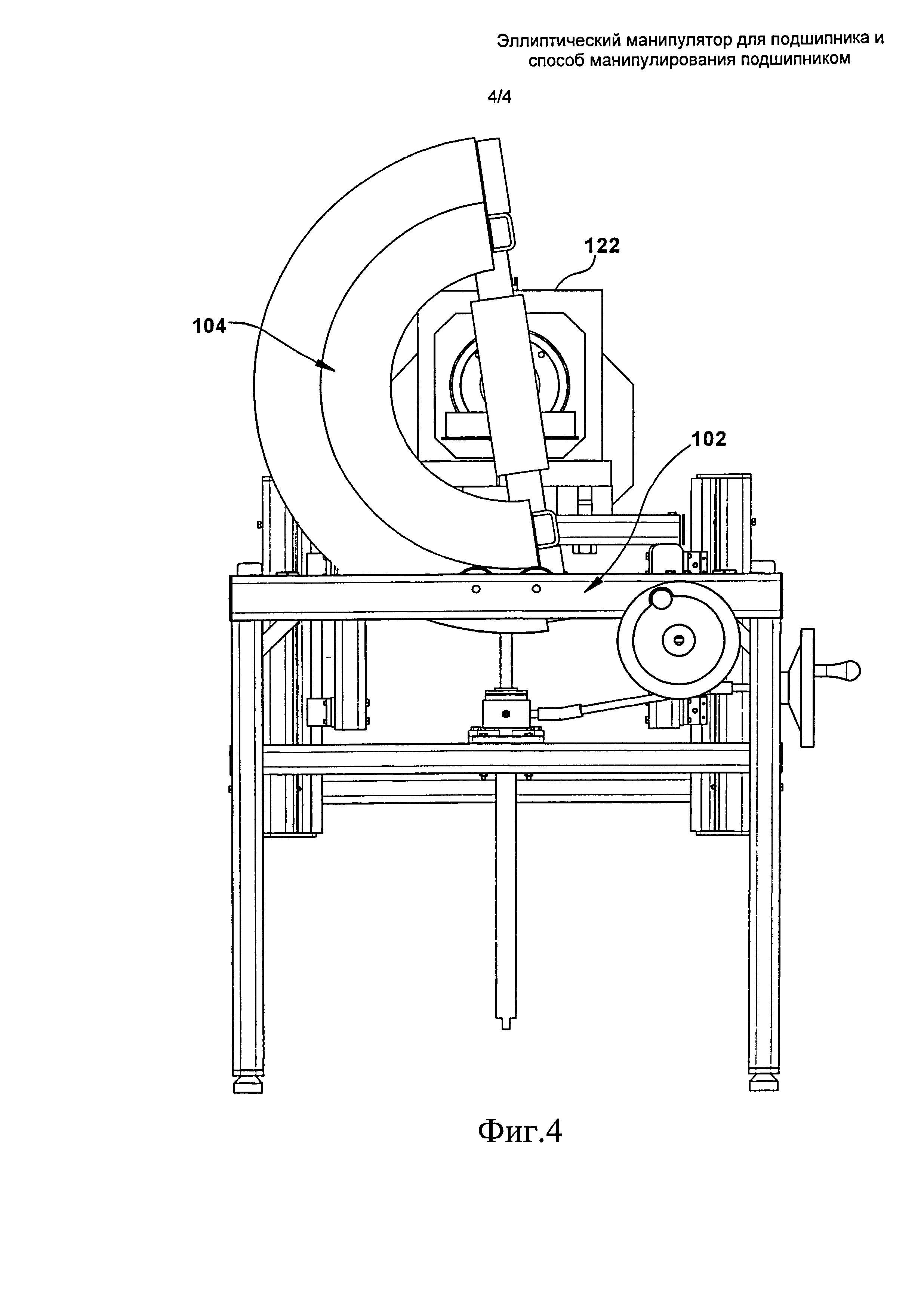
[0010] На фиг.4 изображен вид спереди манипулятора для подшипника вместе с установленным на нем подшипником согласно аспектам предлагаемого изобретения, иллюстрирующий поворот подшипника относительно рамы манипулятора для подшипника.
[0011] Следует отметить, что чертежи могут быть не в масштабе. На чертежах показаны только типичные аспекты изобретения, и поэтому они не должны рассматриваться как ограничивающие объем изобретения. На чертежах одинаковые номера позиций относятся к одним и тем же элементам.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0012] На фиг.1 изображен манипулятор 100 для подшипника согласно варианту выполнения изобретения. Манипулятор 100 используется для поддержки подшипника 104 (показан на фиг.2) и манипулирования им при наварных работах. На чертежах показана половина 104 подшипника, однако очевидно, что варианты выполнения настоящего изобретения могут использоваться для манипулирования целым подшипником или любой другой частью подшипника. Однако с иллюстративными целями на чертежах и в тексте описана половина подшипника, то есть кольцевой подшипник, разрезанный надвое.
[0013] Как понятно специалисту и показано на фиг.2, подшипник 104 имеет внешнюю поверхность 103 и внутреннюю поверхность 105. Внутренняя поверхность 105 представляет собой поверхность, через которую вставлен вращающийся компонент (не показан) при эксплуатации в турбомашине. Следовательно, на внутреннюю поверхность 105 желательно нанести защитный слой материала, например, баббит. Специалисту понятно, что наилучшие результаты достигаются при наваривании материала в самой нижней точке поверхности 105 подшипника, обозначенной на фиг.2 стрелкой W, указывающей место наварки материала. Следовательно, существует необходимость непрерывного манипулирования подшипником 104, то есть, поворота, при котором каждую часть поверхности 105 последовательно располагают в самой нижней точке. Таким образом, на всю внутреннюю поверхность 105 может быть нанесен навариваемый материал. Ниже описаны варианты выполнения изобретения, в которых обеспечивается более легкий доступ ко всей внутренней поверхности 105 подшипника 104 для нанесения требуемого навариваемого материала.
[0014] Как показано на фиг.1, манипулятор 100 содержит раму 102 для поддержки подшипника 104. Рама 102 может содержать любую конфигурацию стоек и опорных элементов, известных из уровня техники. В показанном на фиг.1-4 примере рама имеет обычный вид стола с четырьмя ножками и открытым верхом. Однако, понятно, что может быть использована любая конфигурация или рама любой формы. Как показано на фиг.1-4, рама 102 может быть приподнята от пола, так что оператор наварных работ (или автоматический наварной аппарат) может иметь доступ к подшипнику 104, установленному на раме 102. Как лучше показано на фиг.1, верхняя поверхность рамы 102 содержит по меньшей мере один регулируемый ролик 106, на который установлен подшипник 104. На фиг.1 изображены четыре таких регулируемых ролика (две группы по два ролика 106), однако понятно, что могут использоваться ролики 106 в большем или меньшем количестве. Регулируемые ролики 106 выполнены таким образом, что внешняя поверхность 103 подшипника 104 (фиг.2) находится в контакте с регулируемыми роликами 106, причем ролики обеспечивают или вызывают поворот подшипника 104 как описано в данном документе. Регулируемые ролики 106 обеспечивают также поддержку подшипника 104 при его установке на раме 102. -
[0015] Рама 102 также содержит устройство 108 горизонтальной регулировки, предназначенное для регулировки системы 100 с подгонкой к ширине подшипника 104. Например, устройство 108 может быть выполнено с возможностью регулировки части рамы 102 и/или группы регулируемых роликов 106. В показанном на фиг.1 варианте выполнения изобретения устройство 108 горизонтальной регулировки содержит колесо, которое при повороте перемещает направляющую 109 горизонтальной регулировки. В свою очередь, указанная направляющая может перемещать по меньшей мере несколько роликов 106. Таким образом, часть рамы 102 и ролики 106 могут быть отрегулированы с подгонкой к ширине подшипника 104. Очевидно, что другие элементы рамы 102 могут быть отрегулированы с подгонкой к подшипнику 104, например, можно переместить группу опорных элементов вдоль верхней части рамы 102 таким образом, чтобы подшипник 104 опирался на раму 102. Также очевидно, что могут использоваться другие устройства горизонтальной регулировки 102 с подгонкой рамы 102 к ширине подшипника 104. Например, для перемещения одной или нескольких направляющих рамы 102 может использоваться гидравлическое устройство. В другом примере направляющие рамы 102 могут быть отрегулированы вручную (например, направляющие могут быть установлены на роликах со стопорами для их блокировки), или направляющие могут скользить назад и вперед при помощи других известных роботизированных средств. В еще одном примере рама 102 может содержать наклоненную верхнюю поверхность, имеющую ролики, расположенные под углом, так что подшипник может скользить вниз по конусообразной поверхности в необходимое положение. Таким образом, могут использоваться подшипники различных размеров, поскольку каждый подшипники скользит вниз по роликам в зависимости от своего размера. Например, подшипники меньшего размера располагаются на раме ниже, чем подшипники большего размера.
[0016] Рама 102 также содержит по меньшей мере один регулируемый рычаг 110, выполненный с возможностью прикрепления к подшипнику 104. На фиг.1 и 2 показаны два таких рычага 110, однако, понятно, что могут использоваться рычаги в большем или меньшем количестве. На фиг.1 и 2 показан вариант выполнения, в котором два рычага 110 соединены воротником 112, при этом рычаги 110 выполнены с возможностью движения вниз для контакта с двумя горизонтальными поверхностями 111 подшипника 104. На фиг.1 рычаги 110 показаны в вертикальном положении до закрепления на подшипнике 104, а на фиг.2 рычаги 110 показаны после их перемещения для контакта с подшипником 104. Следует отметить, что в примере, показанном на фиг.1-4, подшипник 104 представляет собой половину подшипника и, соответственно, имеет две по существу параллельные горизонтальные поверхности 111, как показано на фиг.2. Очевидно, что при использовании цельного подшипника рычаги 110 могут быть выполнены иначе для контакта с другой частью подшипника 104. Например, рычаги 110 могут контактировать с внутренней поверхностью 105 подшипника 104 или контактировать с его внешней поверхностью 103.
[0017] Рама 102 также содержит устройство 114 вертикальной регулировки части рамы 102 и/или узла двигателя / редуктора 120, 122 с подгонкой к высоте подшипника 104. Например, устройство 114 может быть выполнено с возможностью регулировки рычагов 110 и/или редуктора 122. В показанном на фиг.1 и 2 варианте выполнения устройство 114 содержит колесо, которое при повороте перемещает поверхность 116 вертикальной регулировки. Рычаги 110 и/или редуктор 122 соединены с поверхностью 116 таким образом, что при перемещении поверхности 116 рычаги 110 и редуктор 122 также перемещаются вверх и вниз относительно рамы 102 и подшипника 104. Таким образом, рычаги 110 могут быть отрегулированы с подгонкой к высоте подшипника 104. В примере, показанном на фиг.2, рычаги 110 отрегулированы так, что они могут контактировать с горизонтальными поверхностями 111 подшипника 104. Очевидно, что рычаги 110 могут быть отрегулированы непосредственно или путем перемещения поверхности (например, поверхности 116), с которой они связаны. Также очевидно, что могут использоваться любые другие устройства вертикальной регулировки рычагов 110 и редуктора 122, например, может использоваться гидравлическое устройство для перемещения рычагов 110 вверх и вниз для достижения необходимой высоты. В другом примере вместо редуктора 122 и/или рычагов 110 подшипник 104 может перемещаться вверх и вниз. Например, направляющие рамы 102 могут перемещаться вверх и вниз с подгонкой к различным высотам подшипника 104. В другом примере подшипник 104 может перемещаться на правильную высоту с использованием конусообразных роликов, причем промежуток между роликами может регулироваться таким образом, чтобы обеспечить правильное положение для установки подшипника 104 на роликах. Например, для подшипников меньшего размера ролики можно придвинуть друг к другу, а для подшипников большего размера ролики можно отодвинуть друг от друга. Таким образом, подшипник большего размера располагается на раме 102 ниже, чем подшипник меньшего размера, однако верхние части обоих подшипников находятся по существу на одном уровне. В другом варианте выполнения для узла двигателя 120 / редуктора 122 и для рычагов 110 может использоваться отдельная ось. Таким образом, необходимо регулировать только рычаги 110, а ремень или цепь могут использоваться в качестве натяжного приспособления.
[0018] Рычаги 110 также выполнены таким образом, что они могут быть съемно присоединены к подшипнику 104. Например, как показано на фиг.2, в контактных точках 118 между рычагами 110 и горизонтальными поверхностями 111 могут быть использованы болты для болтового крепления рычагов 110 к подшипнику 104. Очевидно, что могут быть использованы другие средства крепления, например, винт, штифт, фрикционная смесь, клей или зажим и другие средства.
[0019] Как показано на фиг.1 и 2, манипулятор 100 содержит также двигатель 120, предназначенный для пошагового перемещения подшипника 104. В одном примере двигатель 120 может быть соединен с редуктором 122, который в свою очередь может быть соединен с воротником 112 и рычагами 110. Таким образом двигатель 120 может приводить в движение рычаги 110, которые в свою очередь перемещают подшипник 104, как описано более подробно ниже. В другом примере двигатель 120 может быть соединен с роликами 106 или другой частью рамы 102 для перемещения подшипника 104, как описано ниже.
[0020] В процессе работы подшипник 104 устанавливают на раму 102. Для выполнения данной операции пользователь сначала подготавливает манипулятор 100, подгоняя его к подшипнику 104. Например, пользователь может использовать устройство 108 для горизонтальной регулировки рамы 102 и ролики 106 с подгонкой под ширину подшипника 104, например, путем вращения колеса до тех пор, пока направляющая 109 горизонтальной регулировки не окажется в правильном положении, так что ролики 106 соответствуют ширине подшипника 104. После регулировки роликов 106 и рамы 102 подшипник 104 устанавливают на раму 102 таким образом, что внешняя поверхность 103 опирается на ролики 106, а внутренняя поверхность 105 обращена вверх и открыта для доступа. Как правило, для подъема и установки подшипника 104 на раму 102 используют кран (не показан).
[0021] После размещения подшипника 104 (или до размещения подшипника 104) рычаги 110 могут быть отрегулированы с подгонкой к высоте подшипника 104, а редуктор 122 и/или подшипник 104 могут быть отрегулированы таким образом, что центровая линия CL (т.е. радиус) подшипника 104 совпадает с центровой линией CL редуктора 122, как показано на фиг.3. Например, пользователь может использовать устройство 114 вертикальной регулировки, например колесо, для перемещения редуктора 122 и/или рычагов 110 вверх и вниз, В варианте выполнения, показанном на фиг.1-3, перемещение редуктора 122 обеспечивает также перемещение рычагов 110 с подгонкой к высоте подшипника 104. Однако, как отмечено в данном документе, рычаги 110 могут быть отрегулированы различными способами. После правильной установки подшипника 104 и редуктора 122 рычаги 110 опускают до тех пор, пока они не войдут в контакт с подшипником 104 (см., например, фиг.1, на которой рычаги 110 изображены в поднятом положении, и фиг.2, на которой рычаги 110 изображены в опущенном положении в контакте с подшипником 104). В одном примере два рычага 110 соприкасаются с двумя горизонтальными поверхностями 111 подшипника 104. Затем рычаги 110 могут быть закреплены на подшипнике 104, например, с использованием по меньшей мере одного болта.
[0022] После установки подшипника 104 и его закрепления на внутреннюю поверхность 105 может быть нанесен навариваемый материал, как показано стрелкой W на фиг.2. Наварка может быть выполнена вручную или при помощи автоматического наварного аппарата. После наваривания материала двигатель 120 может пошагово поворачивать подшипник 104. Могут быть использованы любые известные средства активирования двигателя 120 и редуктора 122, например, для активирования двигателя 120 и поворота подшипника 104 может использоваться ножная педаль.
[0023] Двигатель 120 и редуктор 122 могут быть соединены с системой управления, известной из уровня техники, что позволяет пользователю запрограммировать работу двигателя 120 в нужном режиме. Например, пользователь может задать любой угол поворота подшипника 104. В одном примере угол поворота может зависеть от ширины навариваемого материала. Например, при нанесении навариваемого материала шириной 1/4 дюйма (0,6 см) на подшипник 104 двигатель 120 поворачивает подшипник 104 на угол, достаточный для перемещения подшипника приблизительно на 1/4 дюйма (0,6 см), так что следующий навариваемый материал наносится на чистую поверхность без наварки. Таким образом подшипник 104 может поворачиваться с шагом, по существу эквивалентным толщине навариваемого материала, то есть интервалу сдвига навариваемого материала. Очевидно, что могут использоваться любые другие шаги поворота.
[0024] Из горизонтального, опорного положения, показанного на фиг.2 и 3, подшипник 104 может быть повернут на угол приблизительно до 90 градусов в любом направлении, то есть по часовой стрелке или против часовой стрелки относительно горизонтальной плоскости рамы 102. При этом обеспечивается в некотором отношении расположение всей поверхности 105 подшипника 104 в самой нижней точке подшипника 104. Для предотвращения избыточного поворота подшипника 104 могут быть предусмотрены ограничители хода. На фиг.4 проиллюстрирован поворот подшипника 104 относительно рамы 102. Манипулятор 100 называется эллиптическим манипулятором для подшипника, поскольку подшипник 104 поворачивается по эллиптической изогнутой дуге.
[0025] Таким образом, в процессе наварки манипулятор 100 обеспечивает требуемые поддержку и автоматический поворот подшипника 104, благодаря чему полностью устраняется или уменьшается необходимость в кране или другом оборудовании для обеспечения пошагового перемещения подшипника 104 между нанесениями навариваемого материала. В отличие от известных из уровня техники систем манипулятор 100 является универсальным в том смысле, что он может быть отрегулирован по вертикали и по горизонтали для удержания и поворота подшипника 104 любого размера, используемого, как правило, в средних и крупногабаритных турбомашинах, без внесения каких-либо изменений в сам подшипник. Кроме того, в манипуляторе 100 используется двигатель 120, обеспечивающий поворот подшипника 104 с остановкой в любом необходимом положение для наварки, например, полный поворот подшипника 104 с обеспечением наварки на самой малой высоте подшипника 104 при наварке по всей внутренней поверхности подшипника. Поскольку двигатель 120 может быть запрограммирован для поворота подшипника 104 на заданную величину, например на ширину навариваемого материала, использование манипулятора 100 позволяет уменьшить ошибку пользователя благодаря тому, что не требуется поворачивать подшипник вручную самим пользователем после каждого нанесения навариваемого материала. Соответственно, уменьшается вероятность нахлеста при наварном проходе. Кроме того, в манипуляторе 100 подшипника используется рама 102, несущая нагрузку от веса подшипника 104, например, при размещении на роликах 106 на опорной направляющей рамы 102, что отличается от известных из уровня техники систем, в которых предусмотрена подвесная или консольная конструкция. Таким образом, использование рамы 102 для поддержания подшипника 104 повышает безопасность при манипулировании крупногабаритными подшипниками, которые, как правило, используются в турбомашинах.
[0026] В одном варианте выполнения двигатель 120 может быть выполнен с возможностью передачи движения на редуктор 122, который, в свою очередь, перемещает рычаги 110, закрепленные на подшипнике 104. Таким образом, двигатель 120 может обеспечивать перемещение подшипника 104. Ролики 106 также могут способствовать перемещению подшипника 104, обеспечивая скольжение внешней поверхности 103 по роликам 104 при повороте подшипника 104. В другом варианте выполнения вместо пассивного обеспечения поворота подшипника 104 ролики 106 могут быть соединены с двигателем и выполнять функцию приводного механизма, поворачивающего подшипник 104. В этом варианте выполнения поворот подшипника 104 обеспечивается только роликами 106 или данные ролики вместе с рычагами 110 обеспечивают поворот подшипника 104. В еще одном варианте выполнения, при использовании целого подшипника (в отличие от половины подшипника, показанной на фиг.1-4) двигатель 120 может быть выполнен с возможностью перемещения колеса, которое прокатывает подшипник 104 путем непосредственного контакта снизу. Колесо может быть выполнено регулируемым в зависимости от его сжимаемости.
[0027] Очевидно, что хотя раскрытые аспекты предлагаемого изобретения относятся к поддержке подшипника и манипулированию им при наварке, предлагаемый манипулятор может использоваться для поддержки и манипулирования подшипником в любом требуемом процессе, например, при сборке, осмотре и/или механической обработке.
[0028] Используемая в данном документе терминология предназначена только для описания отдельных вариантов выполнения и не ограничивает само изобретение. Применяемые в данном документе термины в единственном числе подразумевают множественное число, если в контексте четко не указано иначе. Следует также понимать, что использованные в данном документе выражения "содержит" и/или "содержащий" указывают на наличие заявленных признаков, систем, этапов, операций, элементов и/или компонентов, но не исключают наличие или добавление одного или нескольких других признаков, систем, этапов, операций, элементов, компонентов и/или их групп.
[0029] Данное изобретение раскрыто на примерах, включающих наиболее предпочтительные варианты, а также позволяющих любым специалистам реализовать изобретение на практике, включая создание и применение любых устройств или систем, и осуществление любых предусмотренных способов. Объем охраны изобретения определен формулой изобретения и может включать другие примеры, которые могут возникнуть у специалистов. Такие другие варианты не выходят за рамки объема формулы изобретения, если они содержат конструктивные элементы, которые не отличаются от точной формулировки формулы изобретения, или если в их состав входят эквивалентные конструктивные элементы, имеющие несущественные отличия от точных формулировок формулы изобретения.
Газотурбинная установка и установка, содержащая лопатки-форсунки (варианты)
Осевой объемный компонент газотурбинного двигателя (варианты), осевой объемный компрессор газотурбинного двигателя и осевой объемный расширитель газотурбинного двигателя
Схема и топология высоконадежной системы силовой электроники
Камера сгорания для газовой турбины(варианты) и способ эксплуатации газовой турбины
Устройство для электроэрозионного объемного копирования (варианты)
Установка, содержащая вращательный механизм, и установка, содержащая ротор
Приводная система и устройство для подъема
Устройство для электроимпульсной обработки
Турбинная установка, содержащая роторную машину, и турбинная установка, содержащая балансировочный груз
Газификатор (варианты)
Система управления с обратной связью для управления сгоранием в двигателях
Камера сгорания и способ эксплуатации камеры сгорания
Структуры ударного воздействия для систем охлаждения
Противоточная паровая турбина с частями высокого и низкого давления
Стопорная втулка для предотвращения поворота и стопорный узел из фланца и трубы
Газотурбинная установка и установка, содержащая лопатки-форсунки (варианты)
Осевой объемный компонент газотурбинного двигателя (варианты), осевой объемный компрессор газотурбинного двигателя и осевой объемный расширитель газотурбинного двигателя
Схема и топология высоконадежной системы силовой электроники
Камера сгорания для газовой турбины(варианты) и способ эксплуатации газовой турбины
Устройство для электроэрозионного объемного копирования (варианты)

