Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПРОПУСКОМ АВТОМОБИЛЕЙ ЧЕРЕЗ ЗАДАННУЮ ГРАНИЦУ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к области регулирования движения автомобилей, а именно к способам и системам управления пропуском автомобилей через находящуюся на их пути заданную границу в обоих направлениях, и, более точно, к способам и системам управления пропуском автомобилей, основанным на контроле регистрационных номеров автомобилей с помощью видеосистем, установленных на пути их движения. Эти способы и системы могут использоваться при въезде автомобилей на некоторый участок дороги или при повороте на другую дорогу, при въезде автомобилей на контролируемую территорию и при выезде из нее, при парковке автомобилей на любых автостоянках.
Уровень техники
В известных способах и системах контроля регистрационных номеров автомобилей с помощью видеосистем используют видеокамеры, дающие плоское изображение контролируемой области (или, иначе говоря, сцены).
Так, известны способ и устройство детектирования номера автомобиля с помощью видеокамеры, установленной на пути движения автомобиля и дающей плоское изображение (см. заявку на патент США 2013/0050493 от 2012 г., опубл. Feb.28, 2013, US Class 348/148, "Device and Method for Detecting Vehicle License Plates", автор Sladjan Mitle (Вена), патентообладатель KAPSCH TRAFFICCOM AG (Вена, Австрия)).
Устройство по этой заявке содержит видеокамеру, дающую плоское изображение, источник освещения и соединенный с ними управляющий блок, выполненный в виде микропроцессора. В этом устройстве источник освещения не объединен конструктивно с видеокамерой, а реализован в виде отдельно установленного «прожектора». Этот источник освещения может состоять из одного источника или группы источников видимого и/или инфракрасного излучения и может быть выполнен с управляемыми параметрами. Способ обнаружения регистрационного номера автомобиля по этой заявке сводится к тому, что сначала ищут пластину с регистрационным номером автомобиля (license plate), которая в соответствии с ГОСТ Р 50577-93 в России называется номерным знаком автомобиля, для чего используют видеокамеру в режиме генерирования последовательности изображений обозреваемого пространства с низким разрешением и с высокой скоростью кадров. А когда такая пластина (или, иначе говоря, номерной знак) обнаружена, детектируют регистрационный номер автомобиля на этой пластине, для чего переключают видеокамеру в режим формирования изображений этой пластины с высоким разрешением и с малой скоростью кадров. Эти способ и устройство по этой заявке могут быть использованы в системах управления пропуском автомобилей через заданную границу. Однако недостаток этого способа и устройства заключается в том, что они обеспечивают обнаружение регистрационных номеров автомобилей только при их движении в одном направлении.
Известна система наблюдения за объектами в контролируемой области (или, иначе говоря, в сцене), названная «системой мониторинга изображений» и способная распознавать, в частности, регистрационные номера автомобилей, а также способ построения подобных систем (см. заявку на патент США 2013/0208113 от 23 июля 2013 г., опубл. 15 августа 2013 г., US Class 348/143, "Image Monitoring Apparatus, Image Monitoring System, and Image monitoring System Configuration Method", авторы K. Yoneji, T. Yoshimanaga, D. Matsubara, T. Kagehiro (Япония), заявитель Hitachi, Ltd (Япония)).
Эта система содержит видеокамеру, установленную над сценой и предназначенную для получения изображения всей сцены (overhead camera), две или более прицельно направленных видеокамеры (gazing cameras), предназначенных для получения изображений конкретных объектов («целей») в сцене, а также соединенные с этими видеокамерами программно-аппаратные средства, реализованные в процессоре. Видеокамеру, установленную над сценой, можно было бы называть для краткости верхней, что близко к приведенному в заявке английскому названию overhead. Но по выполняемой функции будем называть ее обзорной. Обзорную видеокамеру реализуют в виде видеокамеры «рыбий глаз» (fisheye camera) или широкоугольной видеокамеры (wide-angle camera).
В качестве прицельно направленных видеокамер используют камеры, дающие плоское изображение и позволяющие изменять направление наблюдения и другие параметры. Зрительный охват прицельно направленной видеокамеры гораздо ниже, чем у обзорной видеокамеры. Обзорная видеокамера выдает информацию о позиции, которую занимает «цель», то есть интересующий наблюдаемый объект, а прицельная видеокамера, используя эту информацию о позиции, получает информацию об этом объекте. Такого рода система может быть использована в местах скопления наблюдаемых объектов, в охранных комплексах. Наблюдаемые объекты в подобных системах могут быть любые. В примерах, приведенных в этой заявке, в качестве наблюдаемых объектов часто выступают люди. Однако в 5-м варианте реализации этой системы (Fifth Embodiment) в качестве наблюдаемого объекта выступает автомобиль и при помощи прицельно направленной видеокамеры распознается регистрационный номер автомобиля (см. с.8-9 публикации заявки US 2013/0208113, абзацы [0107]-[0111]). Эта система могла бы быть использована в системе управления пропуском автомобилей через заданную границу. Однако недостаток системы, раскрытой в заявке US 2013/0208113, заключается в необходимости применять сложные управляемые прицельно направленные видеокамеры отдельно для контроля пересечения границы в каждом направлении (т.е. для контроля въезда автомобилей и для контроля их выезда).
Прототипами предлагаемых способа и системы управления пропуском автомобилей через заданную границу являются способ и система для его реализации, представленные в многофункциональной системе мониторинга и управления въездом автомобилей на охраняемый объект и участки внутри него и выездом их оттуда (см. патент США 7119674 от 2003 г., опубл. 2006 г., кл. США 340/521, "Automated Site Security, Monitoring and Access Control System", автор Alan Sefton (США), патентовладелец PIPS Technology, Inc. (Knoxville, США).
Управление пропуском автомобиля через некоторую заданную границу является лишь одной из многочисленных функций, реализованных в указанной сложной многофункциональной системы по патенту US 7119674, в которой предусмотрено множество ситуаций, в которых автомобили должны пересекать некоторые границы, заданные, например, управляемыми барьерами (шлагбаумами). Поэтому прототип предлагаемой системы является лишь упрощенным частным случаем указанной сложной многофункциональной системы по патенту US 7119674, а прототип предлагаемого способа является лишь частью совокупности способов, реализованной в этой системе. Поэтому при описании этих прототипов не будем касаться тех функций и возможностей этой системы, которые отсутствуют в предлагаемой системе или не обязательны для нее.
Способ-прототип управления пропуском автомобилей через заданную границу, находящуюся на их пути, состоит в том, что при помощи видеосистемы, ведущей наблюдение за движением автомобилей в обоих направлениях, до пересечения автомобилем этой границы получают изображение номерного знака этого автомобиля, являющегося кандидатом на это пересечение, затем при помощи узла обработки распознают регистрационный номер автомобиля, указанный на этом знаке, после чего формируют сигнал управления шлагбаумом, установленным на этой границе, для чего вычисляют критерий пропуска путем проведения сравнений полученного контролируемого регистрационного номера с контрольными номерами, хранимыми в базе данных, и подают блоку управления этим шлагбаумом сформированный сигнал управления, разрешающий пересечение этим автомобилем указанной границы, если его номер удовлетворяет вычисленному критерию разрешения пропуска автомобиля.
Система-прототип управления пропуском автомобилей через заданную границу, находящуюся на их пути, при их движении в обоих направлениях, содержащая установленный на указанной границе шлагбаум с блоком управления, видеосистему для наблюдения за движением автомобилей в обоих направлениях и для получения изображения номерного знака автомобиля, являющегося кандидатом на пересечение этой границы, базу данных, хранящую контрольные номера автомобилей, соединенный с видеосистемой и блоком управления шлагбаумом узел обработки, который обеспечивает распознавание контролируемого регистрационного номера автомобиля, указанного на его номерном знаке, и формирование сигнала управления этим шлагбаумом, для чего вычисляет критерий разрешения пропуска путем проведения сравнений полученного контролируемого регистрационного номера с контрольными номерами, хранимыми в базе данных, и передает блоку управления шлагбаумом сформированный сигнал управления, разрешающий пересечение автомобилем указанной границы, если его регистрационный номер удовлетворяет вычисленному критерию разрешения пропуска.
В способе-прототипе и в системе-прототипе используемая видеосистема для наблюдения за движением автомобилей в обоих направлениях и для получения изображения номерного знака автомобиля содержит две видеокамеры, дающие плоские изображения, и соответствующие им два источника освещения участков пути автомобилей, движущихся в противоположных направлениях.
Каждая из этих видеокамер и соответствующий ей источник освещения служит для наблюдения за пересечением границы автомобилем только в одном направлении, противоположном тому, пересечение границы в котором контролируется другой видеокамерой с помощью соответствующего ей источника освещения. В примере, приведенном в прототипе, источник освещения конструктивно объединен с видеокамерой и в нем используется инфракрасные излучатели.
Существенный недостаток способа-прототипа и системы-прототипа заключается в том, что в видеосистеме для наблюдения за движением автомобилей в обоих направлениях используют видеокамеру, способную вести наблюдение только в одном направлении, имеющую невысокий угол зрения и дающую плоское изображение. Вследствие этого у пересекаемой границы в указанной видеосистеме приходится иметь две видеокамеры для контроля пересечения этой границы в двух противоположных направлениях и два источника освещения, соответствующих этим направлениям.
Раскрытие (сущность) изобретения
Задачей предлагаемого изобретения является разработка способа управления пропуском автомобилей через находящуюся на их пути заданную границу в обоих направлениях и системы для реализации этого способа, которые по сравнению с аналогами и прототипом обеспечили бы технический результат в виде одновременного достижения следующих целей:
- сокращение количества видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися по одной дороге в обоих направлениях, до одной видеокамеры;
- сокращение количества видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися в обоих направлениях по двум пересекающимся дорогам, до одной видеокамеры;
- обеспечение возможности управления пропуском автомобилей в автономном режиме и в централизованном режиме в составе удаленного центрального комплекса шлагбаумами в сложных системах;
- обеспечение возможности использования подходящих для различных ситуаций критериев разрешения пропуска автомобилей в автономном режиме управления их пропуском.
Этот технический результат достигается, во-первых, благодаря тому, что в способе управления пропуском автомобилей через заданную границу, находящуюся на их пути, при их движении в обоих направлениях, состоящем в том, что при помощи видеосистемы, ведущей наблюдение за движением автомобилей в обоих направлениях, до пересечения автомобилем этой границы получают изображение номерного знака этого автомобиля, являющегося кандидатом на это пересечение, затем при помощи узла обработки распознают регистрационный номер автомобиля, указанный на этом знаке, после чего формируют сигнал управления шлагбаумом, установленным на этой границе, для чего вычисляют критерий пропуска путем проведения сравнений полученного контролируемого регистрационного номера с контрольными номерами, хранимыми в базе данных, подают блоку управления этим шлагбаумом сигнал управления, разрешающий пересечение автомобилем указанной границы, если его регистрационный номер удовлетворяет вычисленному критерию разрешения пропуска автомобиля, то есть в описанном здесь способе-прототипе, дополнительно осуществляют следующие действия:
- в указанной видеосистеме используют видеокамеру с объективом типа «рыбий глаз»,
- перед началом работы при помощи вспомогательного процессора и соединенного с ним дисплея на сферическом изображении сцены, полученном этой видеокамерой и показываемом на экране этого дисплея, предварительно задают зоны, в которых может появляться изображение номерного знака автомобиля,
- в процессе работы по управлению пропуском автомобилей преобразуют при помощи указанного узла обработки сферические изображения заданных зон, полученные этой видеокамерой и содержащие номерной знак автомобиля, в плоское изображение, которое затем используют для распознавания регистрационного номера автомобиля.
Это позволяет сократить количество видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися по одной дороге в обоих направлениях, до одной видеокамеры, а также сократить количество видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися в обоих направлениях по двум пересекающимся дорогам, до одной видеокамеры.
Во-вторых, этот технический результат достигается в предлагаемом способе за счет того, что видеокамеру с объективом типа «рыбий глаз» устанавливают над указанной границей, пересекаемой автомобилями в обоих направлениях так, чтобы в сферическом изображении сцены на выходе этой видеокамеры находились одновременно заданные зоны, в которых появлялись бы номерные знаки автомобилей, пересекающих эту границу в противоположных направлениях, причем если номерные знаки этих автомобилей появляются в этих зонах одновременно, то очередность пересечения границы этими автомобилями устанавливают при помощи узла обработки.
Это также способствует сокращению количества видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися по одной дороге в обоих направлениях, до одной видеокамеры, и сокращению количества видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися в обоих направлениях по двум пересекающимся дорогам, до одной видеокамеры.
В-третьих, получению этого технического результата способствует то, что в предлагаемом способе предварительно перед началом работы задают автономный, либо централизованный режим управления пропуском автомобилей через заданную границу, затем в централизованном режиме блокируют формирование сигнала управления шлагбаумом в указанном блоке обработки, передают полученный контролируемый регистрационный номер автомобиля из этого блока обработки в центральный комплекс управления шлагбаумами и принимают внешний сигнал управления шлагбаумом из этого комплекса в блок управления шлагбаума, установленного на указанной границе.
Это обеспечивает возможности управления пропуском автомобилей в автономном режиме и в централизованном режиме в составе удаленного центрального комплекса шлагбаумами в сложных системах.
В-четвертых, получению указанного технического результата в предлагаемом способе способствует то, что в нем обеспечивается возможность использования следующих критериев разрешения пропуска автомобилей:
- критерий, который считается выполненным, если контролируемый номер не совпал ни с одним из запрещенных контрольных номеров, хранимых в базе данных;
- критерий, который считается выполненным, если контролируемый номер совпал с одним из разрешенных контрольных номеров, хранимых в базе данных. Во втором их этих критериев обеспечивается возможность использования в качестве разрешенных контрольных номеров номера автомобилей, ранее пресекших заданную границу в обратном направлении.
Это обеспечивает возможности использования удобных (подходящих) для различных ситуаций критериев разрешения пропуска автомобилей в автономном режиме управления их пропуском.
Этот же технический результат обеспечивается тем, что в системе управления пропуском автомобилей через заданную границу, находящуюся на их пути, при их движении в обоих направлениях, содержащей установленный на указанной границе шлагбаум с блоком управления, видеосистему для наблюдения за движением автомобилей в обоих направлениях и для получения изображения номерного знака автомобиля, являющегося кандидатом на пересечение этой границы, базу данных, хранящую контрольные номера автомобилей, соединенный с видеосистемой и блоком управления шлагбаумом узел обработки, который обеспечивает распознавание контролируемого регистрационного номера автомобиля, указанного на его номерном знаке, и формирование сигнал управления этим шлагбаумом, для чего вычисляет критерий разрешения пропуска путем проведения сравнений полученного контролируемого регистрационного номера с контрольными номерами, хранимыми в базе данных, и передает блоку управления шлагбаумом сформированный сигнала управления, разрешающий пересечение автомобилем указанной границы, если его регистрационный номер удовлетворяет вычисленному критерию разрешения пропуска, то есть в этой описанной здесь системе управления пропуском автомобилей - прототипе - указанная видеосистема содержит одну видеокамеру с объективом типа «рыбий глаз», а в указанном узле обработки обеспечено преобразование сферического изображения заданных зон, полученного этой видеокамерой и содержащего номерной знак автомобиля, в плоское изображение и последующее использование его для распознавания регистрационного номера автомобиля, а узел обработки выполнен с возможностью подсоединения к нему вспомогательного процессора с дисплеем для предварительного задания на сферическом изображении сцены указанных зон, в которых может появляться номерной знак автомобиля.
Это позволяет сократить количество видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися по одной дороге в обоих направлениях, до одной видеокамеры, а также сократить количество видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися в обоих направлениях по двум пересекающимся дорогам, до одной видеокамеры.
Этот же технический результат обеспечивается также тем, что в предлагаемой системе видеокамера с объективом типа «рыбий глаз» установлена над указанной границей, пересекаемой автомобилями в обоих направлениях так, чтобы в сферическом изображении сцены на выходе этой видеокамеры находились одновременно заданные зоны, в которых появлялись бы номерные знаки автомобилей, пересекающих эту границу в противоположных направлениях, причем если номерные знаки этих автомобилей появляются в этих зонах одновременно, то очередность пересечения границы этими автомобилями обеспечена в указанном узле обработке.
Это также способствует сокращению количества видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися по одной дороге в обоих направлениях, до одной видеокамеры и сокращению количества видеокамер, ведущих наблюдение за пересечением заданной границы автомобилями, движущимися в обоих направлениях по двум пересекающимся дорогам, до одной видеокамеры.
Получению указанного технического результата способствует то, что в ней установлены блок задания автономного или централизованного режимов управления шлагбаумом, установленным на указанной границе, блок передачи контролируемого регистрационного номера автомобиля в удаленный центральный комплекс управления шлагбаумами и блок приема внешнего сигнала управления указанным шлагбаумом, посылаемого этим центральным комплексом, причем узел обработки выполнен с управляющим входом для установки режима управления этим шлагбаумом и информационным выходом для выдачи контролируемого регистрационного номера автомобиля, блок управления указанного шлагбаума выполнен с управляющим входом для установки режима управления этим шлагбаумом и информационным входом для приема внешнего сигнала управления этим шлагбаумом, выходы указанного блока задания режимов соединены с управляющими входами установки режима узла обработки и блока управления шлагбаумом, выход узла обработки, служащий для выдачи контролируемого регистрационного номера автомобиля, соединен с входом блока передачи этого регистрационного номера в указанный центральный комплекс, выход указанного блока приема соединен с информационным входом блока управления шлагбаумом, а в узле обработки обеспечена блокировка формирования сигнала управления указанным шлагбаумом.
Это обеспечивает возможности управления пропуском автомобилей в автономном режиме и в централизованном режиме в составе удаленного центрального комплекса шлагбаумами в сложных системах. При этом предложенное объединение указанных двух режимов в одной подсистеме требует незначительных затрат аппаратуры.
Получению указанного технического результата в предлагаемой системе способствует то, что в ней в узле обработки обеспечено формирование сигнала разрешения пропуска автомобиля через заданную границу в следующих случаях:
- если контролируемый номер совпал с одним из разрешенных контрольных номеров, хранимых в базе данных;
- если контролируемый номер совпал с одним из разрешенных контрольных номеров, хранимых в базе данных.
Во втором из этих случаев в качестве разрешенных номеров могут быть использованы номера автомобилей, ранее пересекших эту границу в обратном направлении.
Это обеспечивает возможности использования удобных (подходящих) для различных ситуаций критериев разрешения пропуска автомобилей в автономном режиме управления их пропуском.
Краткое описание чертежей
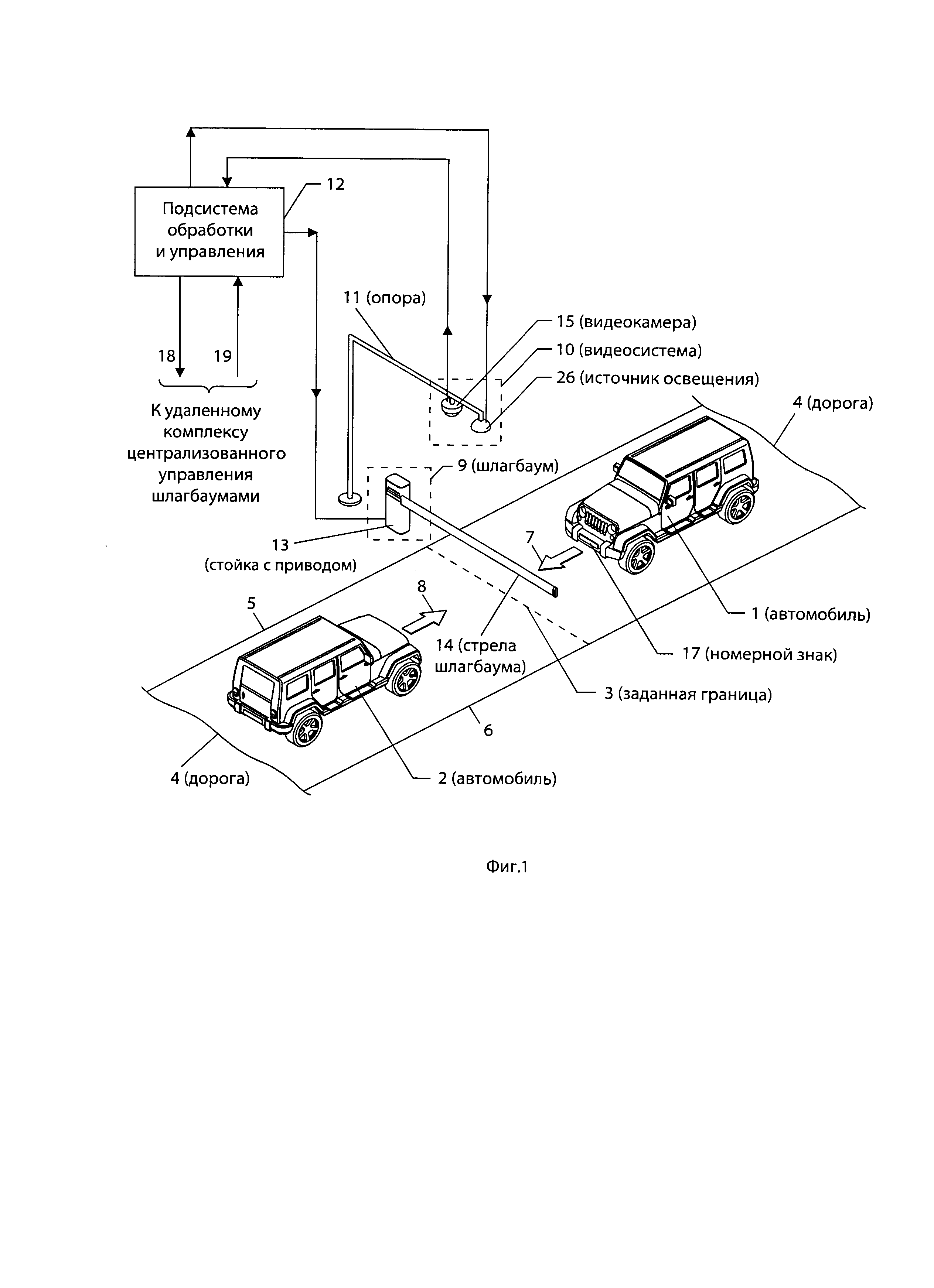
На фиг.1 показан пример установки системы управления пропуском автомобилей через заданную границу при их движении по дороге в обоих направлениях.
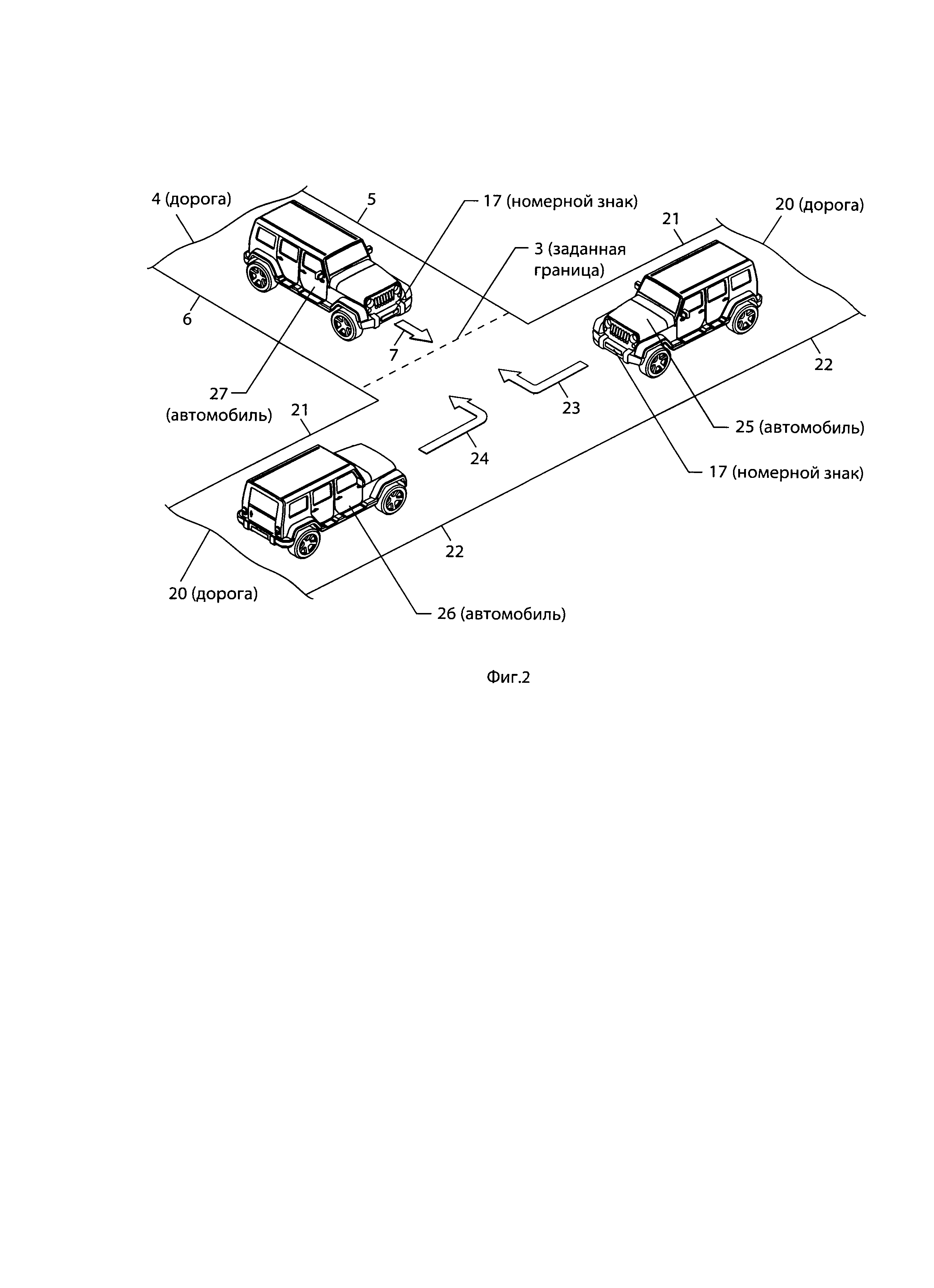
На фиг.2 показан пример места установки системы управления пропуском автомобилей через заданную границу, которая расположена на дороге, на которую можно свернуть с другой дороги при движении по ней в двух противоположных направлениях.
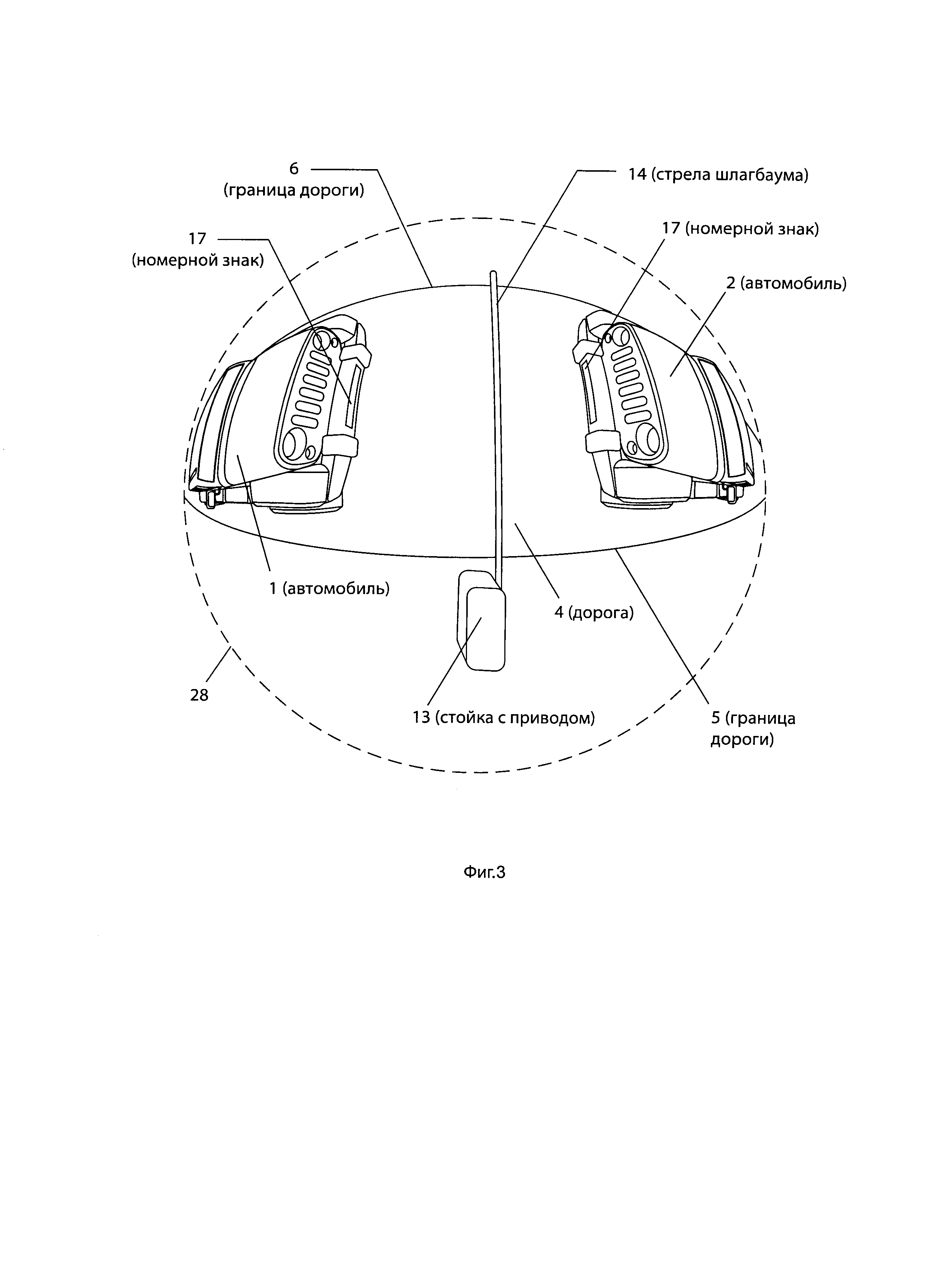
На фиг.3 показано полученное в видеокамере с объективом типа «рыбий глаз» сферическое изображение сцены, приведенной на фиг.1.
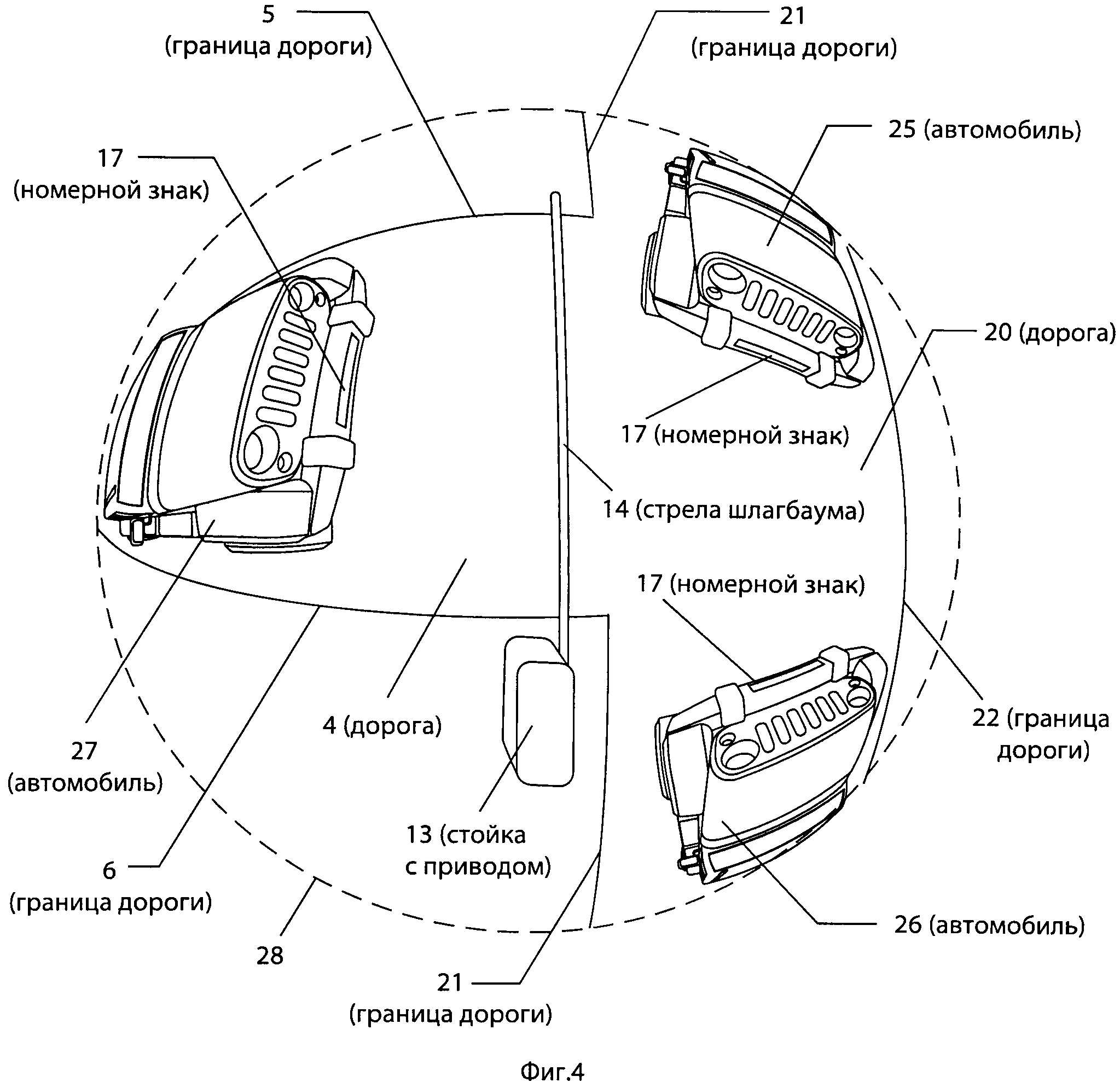
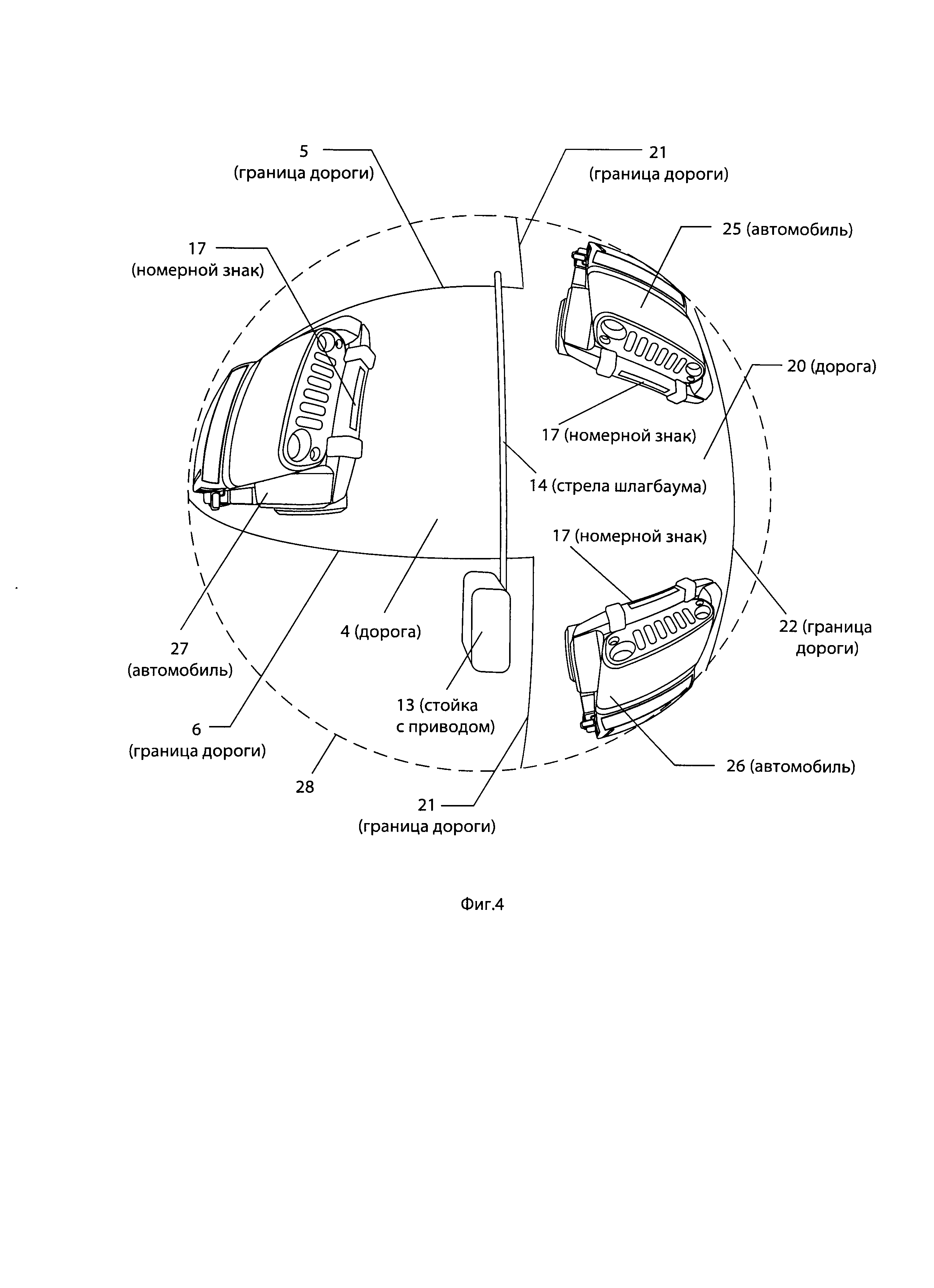
На фиг.4 показано полученное в видеокамере с объективом типа «рыбий глаз» сферическое изображение сцены, приведенной на фиг.2.
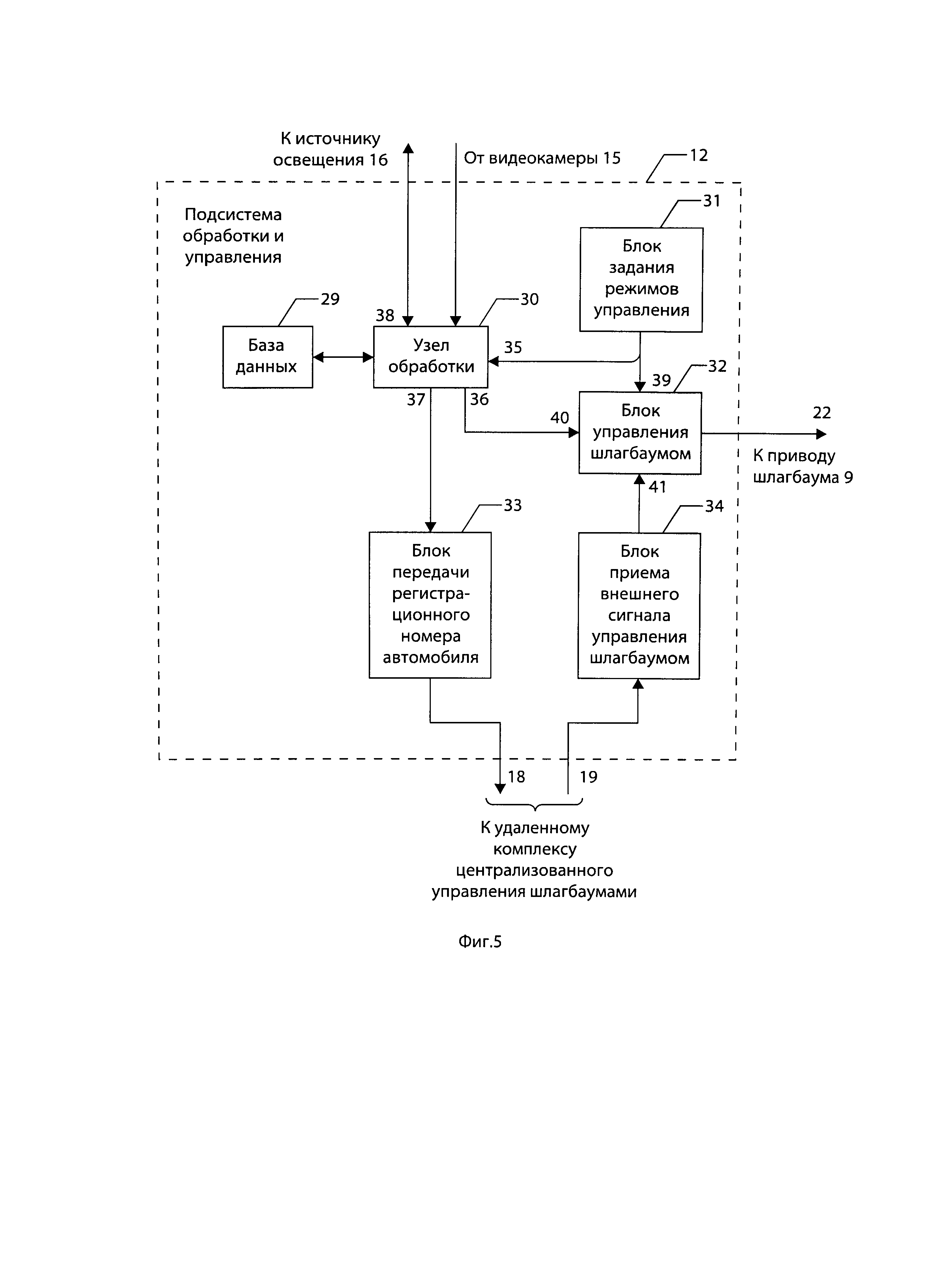
На фиг.5 показана функциональная схема подсистемы обработки и управления в предлагаемой системе управления пропуском автомобилей через заданную границу.
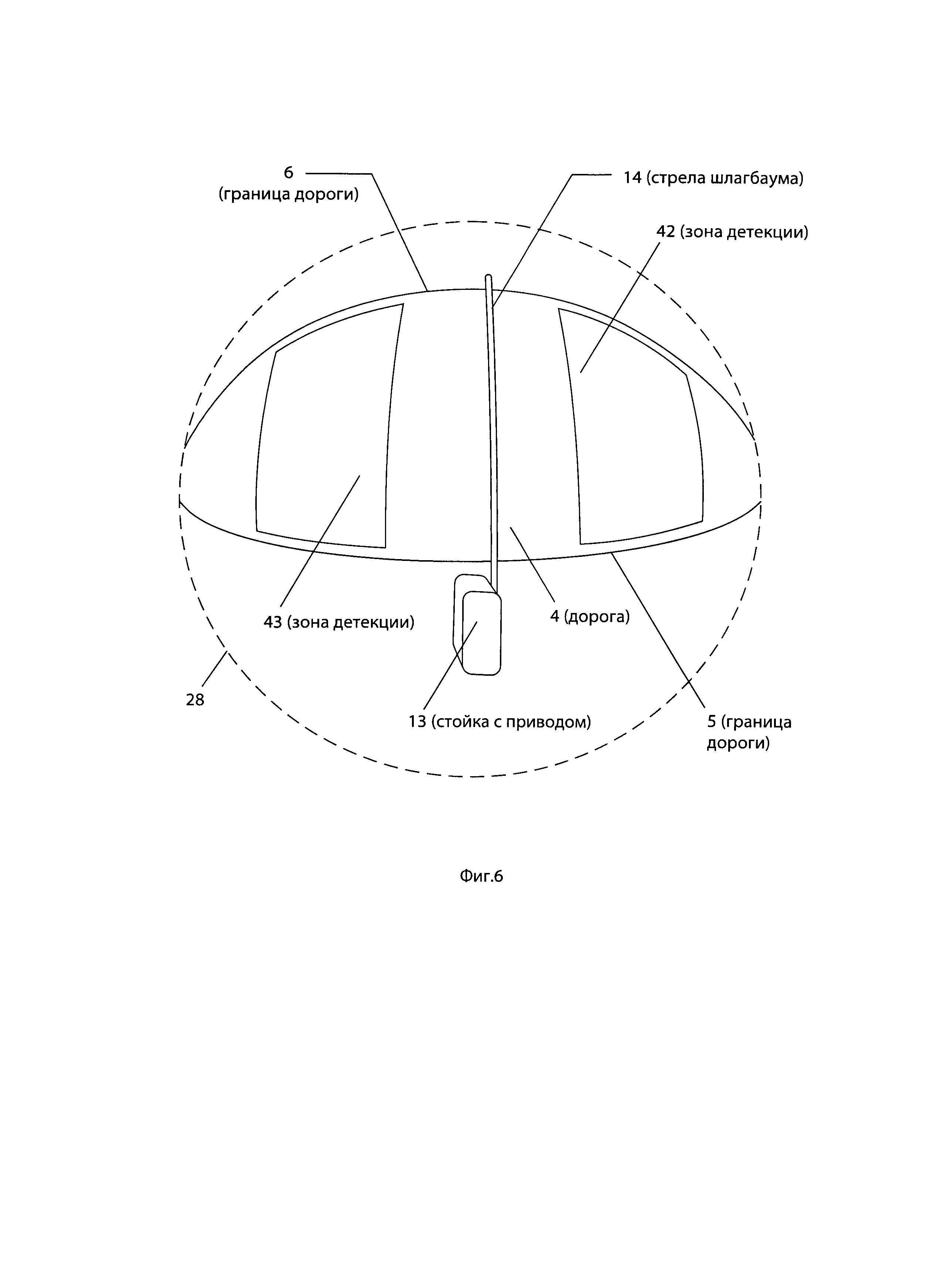
На фиг.6 показано расположение задаваемых зон обнаружения (детекции) номерных знаков автомобилей на сферическом изображении сцены, полученном в видеокамере с объективом типа «рыбий глаз», при движении автомобилей в обоих направлениях, как показано на фиг.1.
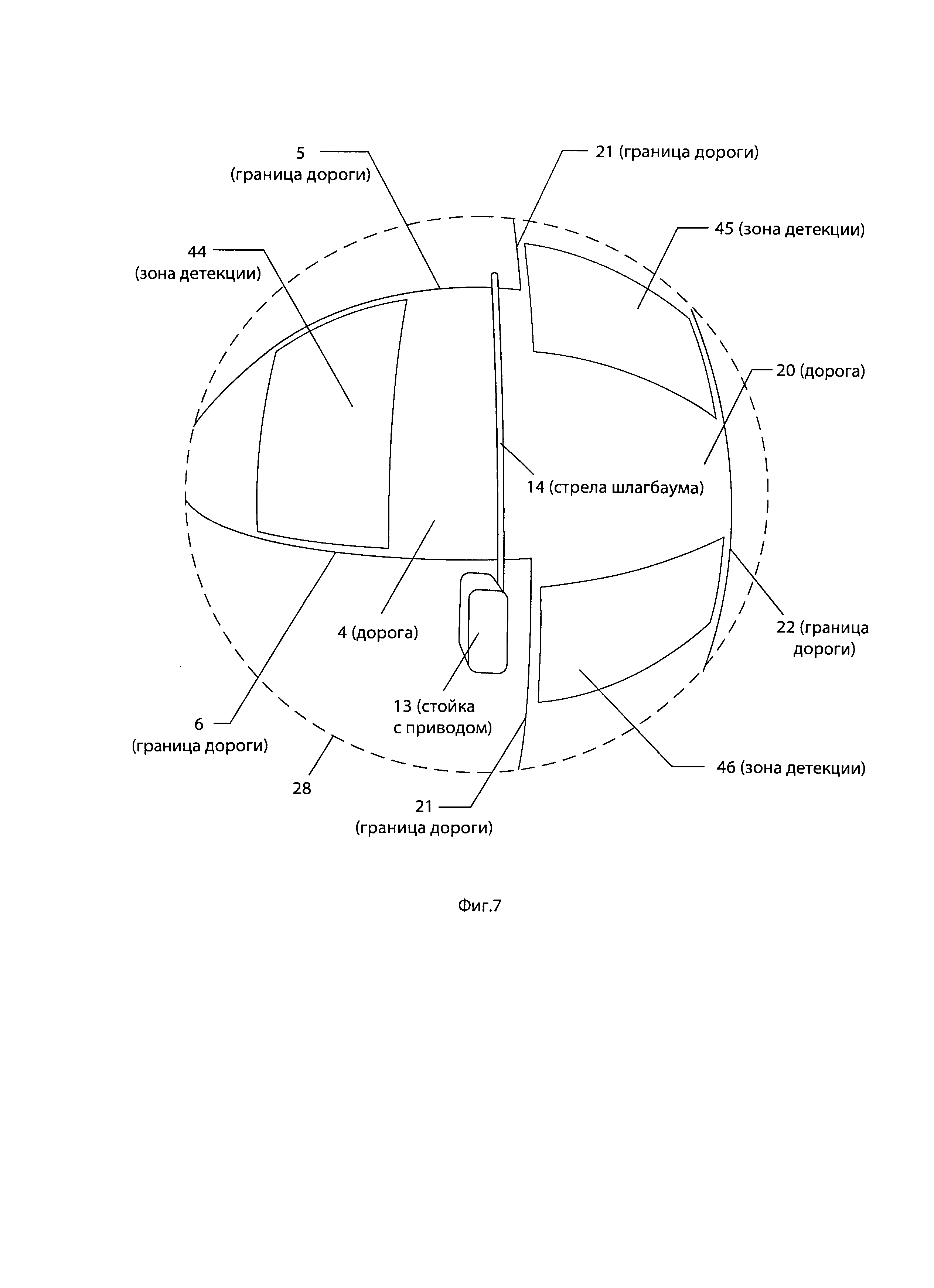
На фиг.7 показано расположение задаваемых зон обнаружения (детекции) номерных знаков автомобилей на сферическом изображении сцены, полученном в видеокамере с объективом типа «рыбий глаз», при движении автомобилей в трех направлениях как показано на фиг.2.
Осуществление изобретения
Описание предлагаемой системы
Предлагаемую систему управления пропуском автомобилей, например автомобилей 1 и 2, через условно заданную границу 3, находящуюся на их пути, устанавливают рядом с этой границей 3 сбоку от их пути, например, дороги 4 с боковыми краями 5 и 6, по которой они движутся в обоих (противоположных) направлениях 7 и 8 (фиг.1).
Предлагаемая система, реализующая предлагаемый способ управления пропуском автомобилей через заданную границу, содержит (фиг.1) шлагбаум 9, видеосистему 10, установленную, например, на Г-образной опоре 11, и подсистему 12 обработки и управления, расположенную вблизи шлагбаума 9 и опоры 11, например, вместе с видеосистемой 10.
Шлагбаум 9 состоит из стойки 13 с приводом (на чертежах отдельно не показан) и подвижной стрелы 14 и установлен так, чтобы при закрытии шлагбаума 9 стрела 14 была расположена по заданной границе 3.
Видеосистема 10 содержит видеокамеру 15 и источник 16 освещения и предназначена для получения изображения номерного знака 17, установленного на передней части автомобиля, например автомобиля 1, являющегося кандидатом на пересечение границы 3 (см. фиг.1).
Подсистема 12 управления и обработки соединена с видеокамерой 15, источником 16 освещения и приводом шлагбаума 9, смонтированным вместе со стойкой 13.
Кроме того, при использовании предлагаемой системы в сложных охраняемых системах с множеством шлагбаумов подсистема 12 обработки и управления выполнена с выходом 18 и входом 19 для соединения линией связи с удаленным комплексом централизованного управления шлагбаумами (не показан), входящим в эти сложные охраняемые системы (на чертежах не показаны).
Возможна также установка предлагаемой системы в точно таком же составе в месте рядом с границей 3 через дорогу 4, на которую можно свернуть с другой дороги 20 с боковыми краями 21 и 22 при движении по ней автомобилей в двух противоположных направлениях 23 и 24 (см. фиг.2). В этой ситуации может оказаться, что по дороге 20 движутся в противоположных направлениях автомобили 25 и 26, которые могут свернуть на дорогу 4, а навстречу им по дороге 4 может двигаться автомобиль 27.
Видеокамера 15 выполнена в виде видеокамеры с объективом типа «рыбий глаз», выдающей сферическое изображение наблюдаемой сцены. При установке предлагаемой системы так, как показано на фиг.1, эта сцена включает в себя дорогу 4, движущиеся по ней в противоположных направлениях автомобили 1, 2 с номерными знаками 17, заданную границу 3, которую они пересекают, и шлагбаум 9 со стрелой 14. Сферическое изображение этой сцены показано на фиг.3.
При установке предлагаемой системы в месте рядом с границей 3 вблизи с пересечением дорог 4 и 20, как это показано на фиг.2, наблюдаемая сцена включает в себя участки дорог 4 и 20, по которым движутся автомобили 25, 26 и 27 с номерными знаками 17, заданную границу 3 и шлагбаум 9 со стрелой 14. Сферическое изображение этой сцены показано на фиг.4.
На фиг.3 и 4 показана граница 28 сферического изображения сцены на выходе видеокамеры 15 с объективом типа «рыбий глаз».
Видеокамера 15 с объективом типа «рыбий глаз» установлена на опоре 11 над указанной границей 3 так, чтобы в сферическом изображении сцены на выходе этой видеокамеры 15 одновременно находились зоны, в которых появлялись бы номерные знаки автомобилей, пересекающих эту границу в противоположных направлениях.
Источник 16 освещения может быть конструктивно объединен с видеокамерой 15, например, как показано на фиг.1, либо может быть установлен отдельно от видеокамеры 15 в любом удобном месте так, чтобы обеспечивать достаточное освещение номерных знаков 17 автомобилей в сцене (такое расположение источника 16 освещения на чертежах не показано). Источник 16 освещения может содержать один источник или группу источников видимого и/или инфракрасного излучения и может быть выполнен с управляемыми параметрами.
Подсистема 12 обработки и управления (фиг.5) содержит базу данных 29, хранящую контрольные номера автомобилей, узел 30 обработки, соединенный с видеокамерой 15, источником 16 освещения и базой данных 29, а также блок 31 задания автономного или централизованного режимов управления шлагбаумом 9, блок 32 управления шлагбаумом, соединенный с приводом шлагбаума 9, блок 33 передачи контролируемого регистрационного номера автомобиля в удаленный комплекс централизованного управления шлагбаумами (не показан) и блок 34 приема внешнего сигнала управления шлагбаумом, посылаемого этим удаленным комплексом.
Узел 30 обработки выполнен с управляющим входом 35 для задания режимов управления шлагбаумом, с выходом 36 для подачи автономного сигнала управления в блок 32 управления шлагбаумом, и с информационным выходом 37 для выдачи контролируемого регистрационного номера автомобиля. Узел 30 обработки может быть также выполнен с выходом 38 для управления источником 16 освещения.
Узел 30 обработки может быть выполнен на основе одного или нескольких микропроцессоров с оперативной памятью. База данных 29 может быть выполнена на основе внешней памяти и микропроцессора, в качестве которого, например, может быть использован микропроцессор, входящий в узел 30 обработки.
Блок 32 управления шлагбаумом выполнен с управляющим входом 39 для установки режима управления шлагбаумом 9, информационным входом 40 для приема автономного сигнала управления шлагбаумом 9 и информационным входом 41 для приема внешнего сигнала управления шлагбаумом 9, поступающего через блок 34 приема от указанного удаленного комплекса централизованного управления шлагбаумами.
Выход блока 31 задания режимов соединен с управляющим входом 35 установки режима в узле 30 обработки и с управляющим входом 39 блока 32 управления шлагбаумом. Информационный вход 40 блока 32 соединен с выходом 36 узла 30 обработки.
Выход 37 узла 30 обработки, служащий для выдачи контролируемого регистрационного номера автомобиля, соединен с входом блока 33 передачи этого регистрационного номера в указанный удаленный комплекс централизованного управления шлагбаумами.
Выход блока 34 приема соединен с информационным входом 41 блока 32 управления шлагбаумом.
Выход блока 33 передачи и вход блока 34 приема являются соответственно выходом 18 и входом 19 подсистемы 12 обработки и управления, показанными на фиг.1.
Узел 30 обработки выполнен с возможностью подсоединения к нему вспомогательного процессора с дисплеем (не показаны) для предварительного задания и контроля на сферическом изображении сцены зон, в которых может появляться номерной знак автомобиля.
Такие предварительно заданные зоны можно назвать зонами детекции. В примере на фиг.6 заданы зоны 42 и 43 детекции, в которых могут появиться номерные знаки автомобилей 1 и 2, показанных на фиг.1 и 3. В примере на фиг.7 видеокамера 15 установлена так, что сферическое изображение сцены на ее выходе одновременно охватывает части дорог 4 и 20, примыкающие одна к другой. Поэтому на этом изображении одновременно заданы зоны 44, 45 и 46 детекции, в которых могут появиться номерные знаки автомобилей 25, 26 и 27, показанных на фиг.2 и 4. Информация о контурах заданных зон детекции записана в памяти узла 30 обработки. На фиг.6 и 7 показана граница 28 сферического изображения сцены на выходе видеокамеры 15 с объективом типа «рыбий глаз».
В предлагаемой системе обеспечены два режима управления шлагбаумом 9 - автономный и централизованный.
В обоих этих режимах управления шлагбаумом 9 - автономном и централизованном - узел 30 обработки обеспечивает выполнение следующих основных функций;
- преобразование полученного видеокамерой сферического изображения предварительно заданных зон сцены, в которых может появиться номерной знак автомобиля, в плоское изображение;
- распознавание контролируемого регистрационного номера автомобиля, указанного на его номерном знаке, появившемся в плоских изображениях указанных зон.
Кроме того, узел 30 через свой выход 38 при необходимости может управлять источником 1 6 освещения.
В автономном режиме управления шлагбаумом 9 узел 30 обработки служит для формирования автономного сигнала управления шлагбаумом 9, для чего узел 30 обработки обеспечивает выполнение следующих действий:
- вычисление критерия разрешения пропуска путем проведения сравнений полученного контролируемого регистрационного номера с контрольными номерами, хранимыми в базе данных;
- передачу блоку 32 управления шлагбаумом сформированного на выходе 36 узла 30 обработки автономного сигнала управления, разрешающего пересечение автомобилем указанной границы, если его регистрационный номер удовлетворяет вычисленному критерию разрешения пропуска.
В автономном режиме управления в блоке 30 обработки может быть обеспечено вычисление различных критериев разрешения пропуска автомобиля. Однако в качестве критериев, удобных и применимых в различных ситуациях, в блоке 30 обработки обеспечено вычисление двух основных критериев.
Согласно первому из этих критериев в узле 30 обработки обеспечено формирование сигнала разрешения пропуска автомобиля через заданную границу, если контролируемый номер не совпал ни с одним из запрещенных контрольных номеров, хранимых в базе данных 29.
Согласно второму из этих критериев в узле 30 обработки обеспечено формирование сигнала разрешения пропуска автомобиля через заданную границу, если контролируемый номер совпал с одним из разрешенных контрольных номеров, хранимых в базе данных 29.
В узле 30 обработки при необходимости может быть обеспечено формирование сигнала разрешения пропуска автомобиля при одновременном выполнении обоих этих критериев.
В случае использования второго из этих критериев в базе данных 29 в качестве разрешенных контрольных номеров может быть обеспечено хранение номеров автомобилей, ранее пересекших границу 3 в направлении, обратном тому, в котором собирается пересечь границу 3 автомобиль с контролируемым номером.
В централизованном режиме управления шлагбаумом 9 в узле 30 обработки обеспечена блокировка формирования автономного сигнала управления указанным шлагбаумом и выдача на выход 37 полученного контролируемого регистрационного номера автомобиля.
В узле 30 обработки обеспечен выбор очередности пересечения границы движущимися в противоположных направлениях автомобилями, номерные знаки которых появляются в заданных зонах одновременно.
Описание работы предлагаемой системы
Работа предлагаемой системы подразделяется на два этапа.
На первом этапе производится предварительная настройка системы.
Второй этап, который назовем этапом управления, начинается после завершения первого этапа, т.е. предварительной настройки, и продолжается в течение необходимого длительного времени. На втором этапе проводится работа по управлению пропуском автомобилей.
На этапе предварительной настройки системы оператор задает зоны детекции в узле 30 обработки, а также задает автономный либо централизованный режим управления пропуском автомобилей.
На этапе управления сначала производятся обнаружение и распознавание номеров автомобилей, являющихся кандидатами на пересечение заданной границы. Эти обнаружение и распознавание производятся одинаково в обоих режимах управления - автономном и централизованном. Дальнейшая работа по управлению пропуском автомобилей протекает по-разному в каждом из указанных режимов управления.
Оба этапа работы предлагаемой системы будут раскрыты ниже.
Предварительное задание зон детекции
Перед началом работы предлагаемой системы к узлу 30 обработки подсоединяют вспомогательный процессор и соединенный с ним дисплей (не показаны) для предварительного задания зон детекции, в которых может появляться номерной знак автомобиля. Как уже отмечалось выше, в качестве примера на фиг.6 показаны заданные зоны 42 и 43 детекции, а на фиг.7 - зоны 44, 45 и 46 детекции.
Предварительное задание зон детекции может производиться различным образом. Один из способов задания зон детекции заключается в том, что при помощи указанных вспомогательного процессора и дисплея оператор задает зоны детекции на сферическом изображении сцены, полученном от видеокамеры 15 и показанном на экране дисплея. Другой способ задания зон детекции заключается в том, что оператор задает зоны детекции на показанном на экране дисплея плоском изображении сцены, преобразованном из ее сферического изображения, полученного от видеокамеры 15. При этом в этих двух способах возможны различные способы задания контуров зон детекции на экране дисплея - от обводки всего контура до построения контура программой по его характерным точкам.
Возможны также различные программные способы построения контуров во вспомогательном процессоре, основанные на том, в каждом случае применения предлагаемой системы заранее известны расположение и геометрические параметры дорог и пересекаемой границы. Эти данные оператор предварительно вводит во вспомогательный процессор. Затем программа этого процессора строит контуры зон детекции для плоского изображения сцены, после чего преобразует их в контуры этих зон для сферического изображения сцены, соответствующего тому, которое получается на выходе видеокамеры 15. При применении этих способов дисплей, соединенный со вспомогательным процессором, может быть использован для контроля и коррекции заданных зон детекции.
При применении всех указанных выше способов информация о полученных контурах заданных зон детекции передается в узел 30 обработки и запоминается в его памяти.
Возможен также случай, когда при применении способов, основанных на том, что заранее известны расположение и геометрические параметры дорог и пересекаемой границы в сцене, функции вспомогательного процессора по построению зон детекции могут быть переданы узлу 30 обработки.
Задание автономного или централизованного режима управления
Перед началом работы предлагаемой системы по управлению пропуском автомобилей в блоке 31 задания режимов оператор задает либо автономный, либо централизованный режим управления пропуском автомобилей через заданную границу. Выходные сигналы блока 31, указывающие заданный режим, поступают на управляющий вход 35 узла 30 обработки и на управляющий вход 39 блока 32 управления шлагбаумом и настраивают узел 30 и блок 32 на заданный режим работы, то есть, другими словами, на заданный режим управления пропуском автомобилей.
Обнаружение и распознавание номеров автомобилей
В обоих указанных режимах (автономном и централизованном) обнаружение и распознавание номеров автомобилей происходит одинаково. Видеокамера 15 ведет наблюдение за движением автомобилей в обоих направлениях в сцене, освещаемой источником 16, и до пересечения любым автомобилем заданной границы 3 получает сферическое изображение номерного знака того автомобиля, который является кандидатом на это пересечение. Это изображение появляется в одной из заданных сферических зон детекции (в зоне 42 или 43 детекции на фиг.6 и в зоне 44, 45 и 46 детеции на фиг.7). Сферические изображения этих зон поступают из видеокамеры 15 в узел 30 обработки, который преобразует их в плоские изображения заданных зон детекции. Затем узел 30 обработки распознает регистрационные номера автомобилей, указанные на автомобильных номерных знаках, появившихся на плоских изображениях зон детекции. В принципе автомобильные номерные знаки могут появиться в нескольких зонах детекции одновременно, например, если два автомобиля являются кандидатами на пересечение границы 3 в разных направлениях. В случае, если номерные знаки автомобилей появляются в нескольких зонах детекции одновременно, то узел 30 обработки устанавливает очередность пересечения границы 3 этими автомобилями.
После этого распознанный в узле 30 обработки регистрационный номер автомобиля становится контролируемым, а именно подвергается контролю, в результате которого будет получено разрешение или запрет на пропуск автомобиля с этим регистрационным номером через границу 3. Этот контроль и вообще вся дальнейшая работа предлагаемой системы в автономном и централизованном режиме протекает по-разному. Рассмотрим работу предлагаемой системы в каждом из этих режимов работы.
Автономный режим работы предлагаемой системы
В автономном режиме работы узел 30 обработки вычисляет критерий разрешения пропуска автомобиля путем проведения сравнений полученного контролируемого регистрационного номера с контрольными номерами, хранимыми в базе данных 29. Узел 30 обработки со своего выхода 36 подает на вход 40 блока 32 управления шлагбаумом автономный сигнал управления, разрешающий пересечение автомобилем границы 3, если его регистрационный номер удовлетворяет вычисленному критерию разрешения пропуска автомобиля. Блок 32 управления шлагбаумом дает сигнал об открытии шлагбаума 9 его приводу.
В автономном режиме управления могут быть использованы различные критерии разрешения пропуска автомобиля. Однако в качестве критериев, удобных и применимых в различных ситуациях, предлагается использовать два основных критерия.
Первый из этих критериев считается выполненным, если контролируемый номер не совпал ни с одним из запрещенных контрольных номеров, хранимых в базе данных 29.
Второй из этих критериев считается выполненным, если контролируемый номер совпал с одним из разрешенных контрольных номеров, хранимых в базе данных 29.
В принципе могут быть одновременно использованы оба этих критерия.
При использовании второго критерия в качестве разрешенных контрольных номеров могут быть использованы номера автомобилей, ранее пересекших границу 3 в направлении, обратном тому, в котором собирается пересечь границу 3 автомобиль с контролируемым номером.
Централизованный режим работы предлагаемой системы
В централизованном режиме в блоке 30 обработки блокируется формирование сигнала управления шлагбаумом (при этом может быть блокировано и вычисление критерия разрешения пропуска автомобиля через заданную границу). Контролируемый регистрационный номер автомобиля передается с выхода 37 узла 30 обработки в узел 33 передачи, который передает этот контролируемый номер со своего выхода 18 в удаленный комплекс централизованного управления шлагбаумами в сложной, например, охранной системе (не показаны). В указанном удаленном комплексе этот контролируемый номер подвергается проверке, принятой в этом комплексе, и вырабатывается внешний сигнал управления шлагбаумом 9, разрешающий или запрещающий пропуск автомобиля с этим контрольным номером через границу 3. Этот внешний сигнал управления шлагбаумом 9 подается на вход 19 блока 34 приема внешнего сигнала управления шлагбаумом, а затем блок 34 передает сигнал, разрешающий пропуск автомобиля, на вход 41 блока 32 управления шлагбаумом, который дает сигнал об открытии шлагбаума 9 его приводу.
Способ дифференциальной диагностики боли пояснично-крестцового отдела позвоночника
Способ выявления повторяющихся кадров видео
Способ дифференциальной диагностики боли пояснично-крестцового отдела позвоночника
Способ выявления повторяющихся кадров видео
Способ и система выявления искажений в системах цифрового телевидения
Способ и система для идентификации группы кадров цифрового телевещания
Способ диагностики гастроэзофагеальной рефлюксной болезни у работающих
Способ передачи сигналов цифрового телевидения на базе потоков mpeg-ts
Способ трансляции телевизионных сигналов
Способ оценки качества работы анализатора транспортного потока mpeg ts
Способ проверки возможности синхронизации компонентов сервиса транспортного потока mpeg ts
Способ автоматизированного поиска неисправностей и мониторинга возможной деградации качества в сетях цифрового телевидения на базе транспортных потоков mpeg ts

