Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПРИГОДНОГО ПУТИ ДВИЖЕНИЯ ДЛЯ ОБЪЕКТА В ТКАНИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу определения по меньшей мере одного пригодного пути для движения объекта, в частности хирургического и/или диагностического устройства, в ткани человека или ткани животного с помощью набора данных интенсивности, получаемого с помощью метода трехмерной визуализации, путь движения соединяет начальное положение устройства с заданным целевым местоположением. Изобретение также относится к машиночитаемому носителю информации, такому как запоминающее устройство, гибкий диск, диск CD, DVD, Blue-Ray или оперативное запоминающее устройство (RAM), а также к компьютерному программному продукту, содержащему используемый компьютером носитель информации, содержащий используемый компьютером программный код, и к компьютеризированной системе.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Системы поддержки принятия решений о медицинских диагнозах или системы компьютерной диагностики или диагностики с компьютерным ассистированием (CAD) используют в медицине для того, чтобы помогать пользователям, таким как медицинские эксперты или врачи, в интерпретации медицинских изображений. Методы рентгеновской визуализации, магнитно-резонансной визуализации (MRI) и ультразвуковая диагностика дают значительное количество информации, которую пользователь имеет для того, чтобы анализировать и оценивать всесторонне за короткое время. Системы CAD помогают сканировать цифровые изображения, например, из магнитно-резонансной визуализации, на типичные явления и для того, чтобы выделять заметные структуры, такие как сосуды, нервные пути, желудочки, функционально выразительные области и/или области опухолей. Обычно технологии машинного обучения, такие как дерево решений и нейронная сеть, используют для построения классификаторов, основываясь на большом числе известных случаев с экспериментальным подтверждением, т.е. случаев, для которых диагноз подтвержден патологией. Классификатор основывает свой диагноз на вычислительной структуре, построенной из известных случаев и введенных признаков, для случая неизвестной структуры. Выходные данные классификатора указывают на оценочную природу неизвестной структуры и необязательно значение достоверности. Поскольку точность оснащения для медицинской визуализации улучшается для того, чтобы обнаруживать очень маленькие структуры, и поскольку возрастает число цифровых изображений, подлежащих обработке, этот тип CAD становится все более важным в качестве инструмента для того, чтобы помогать пользователям, таким как врачи. Полученную с помощью компьютера классификацию рассматривают как вторую возможность для пользователя, такого как врач, чтобы повысить точность и достоверность, связанные с диагнозом.
Хирургическое вмешательство с компьютерным ассистированием (CAS) представляет хирургическую идею и набор способов, в которых используют компьютерные технологии для дохирургического планирования и для контроля или выполнения хирургических вмешательств. CAS также известна как компьютерная хирургия, вмешательство с компьютерным ассистированием, хирургия под визуальным контролем и хирургическая навигация, но эти термины в большей или меньшей степени представляют собой синонимы CAS.
Традиционный подход к определению пригодного пути движения для хирургического и/или диагностического устройства (безопасная хирургическая траектория) в терапии под визуальным контролем, таким как MRI, всегда содержит два основных этапа: сегментация каждой критической структуры в пространственной области, задающей вероятный(е) путь(и) движения вокруг этих областей, и после этого определение соответствующего безопасного или пригодного пути. Одна важная область применения представляет собой хирургические операции на головном мозге. В деталях традиционное планирование хирургической операции преимущественно придерживается следующих этапов.
На первом этапе целевое местоположение задают вручную или автоматическим или полуавтоматическим образом. Это включает или совмещение магнитно-резонансного (MR) объема с шаблоном, часто в стереотаксической системе координат, и обнаружение анатомических структур по этой трансформации, или идентификацию некоторых ориентировочных точек и плоскостей, таких как средняя сагиттальная плоскость и точки AC/PC для того, чтобы определять местоположение цели. Когда цель определена, планирование сводится к обнаружению входной точки. Во многих случаях путь между входными и целевыми точками должен быть прямым и не должен попадать в критические структуры.
Второй этап представляет собой идентификацию критических структур, таких как сосуды, извилины и борозды, желудочки и некоторые функционально выразительные области в головном мозге. Это включает сегментацию этих структур, например, на T1 взвешенных MR изображениях с контрастированием посредством применения набора алгоритмов сегментации изображений. Функционально выразительные области определяют посредством анализа данных fMRI (функциональных магнитно-резонансных изображений) и/или DTI (диффузионно-тензорных изображений).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель изобретения состоит в том, чтобы предоставить усовершенствованный способ и усовершенствованную систему для определения по меньшей мере одного пригодного пути движения для хирургического и/или диагностического устройства в ткани с помощью набора данных, получаемого с помощью метода трехмерной визуализации.
Эту цель достигают посредством настоящего изобретения, как определено в независимых пунктах формулы изобретения.
Способ в соответствии с изобретением содержит этапы, на которых: (i) задают целевое местоположение исходной точки устройства и выбирают по меньшей мере одно вероятное начальное положение исходной точки устройства; (ii) определяют возможный путь движения между соответствующим вероятным начальным положением и заданным целевым местоположением; и (iii) оценивают возможный путь движения в качестве пригодного пути в зависимости от информации о локальных экстремумах интенсивности и/или вариации интенсивности, возникающих из данных интенсивности вдоль возможного пути движения.
Вместо упомянутого ранее двухэтапного подхода к планированию хирургической операции, состоящего из первоначального определения критических структур, которых следует избегать, посредством сегментации их на множестве этапов и последующего определения пригодного пути движения (безопасной траектории), в качестве функции этих результатов сегментации, прямой поиск пригодного пути движения, пропуская этап сегментации, осуществляют в способе в соответствии с изобретением. Другими словами, способ в соответствии с изобретением не рассматривает положение и протяжение критических структур как целое, а просто ищет информацию о максимумах интенсивности и/или минимумах интенсивности и/или вариации интенсивности (информация об интенсивности), возникающих из данных интенсивности вдоль возможного пути движения, указывающих на присутствие критической структуры в домене возможного пути. Критические структуры представляют собой структуры внутри ткани, такие как сосуды, нервные пути, желудочки и/или функционально выразительные области. Следовательно, информацию об экстремумах интенсивности и/или вариации интенсивности из набора данных непосредственно используют для того, чтобы определять по меньшей мере один пригодный путь движения. Способ в соответствии с изобретением имеет среди прочего следующие преимущества:
прямая оценка возможных путей с помощью характеристик интенсивности без необходимости процесса сегментации;
автоматическая адаптация к локальным характеристикам интенсивности, тем самым избегая проблем с неоднородностью интенсивности, сказывающихся, например, на MR изображениях;
гибкость для добавления других типов ограничений, например, интеграция функциональной информации в этап поиска для определения вероятного пути(ей) движения, и
поддержка непрямых путей посредством расширения способа на поиск множества линейных сегментов;
возможность предоставления объясняющего отображения информации о пути в виде графиков интенсивности и миниатюр на основе изображений.
Для того чтобы определять уровень безопасности возможного пути, анализируют профиль интенсивности вдоль вероятного пути движения на основе информации об экстремумах интенсивности и/или вариации интенсивности. Безопасный или пригодный путь не должен иметь большие максимумы или большие минимумы в области пути. Эти максимумы и/или минимумы обнаруживают посредством так называемого подхода скользящего окна, где для каждой точки центрируют окно и вычисляют максимум и минимум интенсивности внутри окна. Если центральный пиксель представляет собой максимум или минимум, он может представлять собой критическую структуру. Чтобы подтвердить это, разность максимума и минимума в окне сравнивают с интенсивностью в целевом местоположении для того, чтобы определять рельефность пика и впадины. После этого, принимая во внимание некоторые пространственные ограничения, траекторию определяют как безопасную или небезопасную. Возможный путь, определяемый как безопасный, представляет собой пригодный путь.
Согласно предпочтительному варианту осуществления изобретения, возможный путь движения представляет собой линейный путь движения, соединяющий начальное положение и целевое местоположение вдоль кратчайшей траектории. Линейный путь движения представляет собой наиболее широко используемый тип пути. Типичное хирургическое и/или диагностическое устройство, использующее линейный путь, представляет собой устройство в форме иглы или стержня.
Согласно другому предпочтительному варианту осуществления изобретения, оценка учитывает экспертную оценку данных интенсивности в области вокруг возможного пути движения. Экспертная оценка предпочтительно представляет собой зависящее от случая решение эксперта о том, является ли вариация интенсивности или локальный максимум (пик) или локальный минимум (впадина) результатом критической структуры. Следовательно, по отношению к настоящему изобретению термин «эксперт» относится к человеку, имеющему знания для того, чтобы интерпретировать данные интенсивности на основании отображаемых структур.
Согласно еще одному другому предпочтительному варианту осуществления изобретения оценка возможного пути движения представляет собой автоматическую оценку, осуществляемую посредством компьютеризированной системы. Эта компьютеризированная система предпочтительно представляет собой систему CAD (диагностирование с компьютерным ассистированием) или CAS (хирургическое вмешательство с компьютерным ассистированием).
Предпочтительно экспертную оценку вместе с соответствующей информацией об интенсивности и/или вариации интенсивности используют для обучения компьютеризированной системы. Компьютеризированная система использует адаптивный алгоритм к вариациям интенсивности посредством обучения на динамическом диапазоне интенсивности входных данных. Соответствующая компьютеризированная система основана на технологии машинного обучения, такой как дерево решений, метод опорных векторов, адаптивный бустинг или нейронная сеть. Классификатор в этой системе основывает свой диагноз на вычислительной структуре, построенной из известных случаев и введенных экстремумов интенсивности и/или вариации интенсивности вдоль возможного пути движения.
Метод трехмерной визуализации предпочтительно представляет собой метод медицинской визуализации для того, чтобы генерировать трехмерное изображение внутренней части объекта из большой серии двухмерных рентгеновских изображений, сформированных вокруг одной оси вращения. Метод трехмерной визуализации, например, представляет собой метод рентгеновской компьютерной томографии (CT) или метод ультразвуковой визуализации. Согласно предпочтительному варианту осуществления изобретения метод трехмерной визуализации представляет собой метод магнитно-резонансной визуализации (MRI), метод ядерной магнитно-резонансной визуализации (NMRI) или метод магнитно-резонансной томографии (MRT). Данные интенсивности получают из T1-взвешенных MR изображений и/или T2-взвешенных MR изображений и/или T*2-взвешенных MR изображений и/или посредством MRI с переносом намагниченности и/или посредством режима с подавлением сигнала свободной воды (FLAIR) и/или посредством магнитно-резонансной ангиографии и/или посредством магнитного резонанса закрытой внутричерепной динамики спинномозговой жидкости (MR-GILD).
Согласно предпочтительному варианту осуществления изобретения, ткань человека или животного представляет собой ткань головного мозга. Важное применение способа определения пути заключается в планировании операции на головном мозге, причем соответствующая ткань представляет собой ткань головного мозга. Критические структуры внутри этой ткани представляют собой сосуды, извилины и борозды, желудочки и/или функционально выразительные области.
В первой альтернативе определяют допустимые углы рыскания и тангажа допустимого пути. Выбранные углы удовлетворяют двум ограничениям: 1) начальное положение должно находиться на том же полушарии, что и целевое местоположение, и 2) поиск должен происходить в направлении верхней части головного мозга, а не в направлении боков или ниже целевого местоположения. Имея уже определенные углы рыскания и тангажа в пределах предварительного заданного диапазона углов, лучи от целевого местоположения идут в направлении поверхности головного мозга, где расположены возможные начальные положения. Наконец, профиль интенсивности каждого возможного пути (возможной траектории) анализируют и помечают в качестве безопасного или небезопасного и/или дают непрерывное значение безопасности. Возможный путь, помеченный как безопасный или имеющий соответствующее значение безопасности, представляет собой пригодный путь.
Во втором подходе определяют срез в осевом направлении, которое соответствует верхней части головы (непосредственно удовлетворяя ограничению, что поиск должен происходить в направлении верхней части головного мозга, а не с боков или ниже целевого местоположения). Для целевого местоположения на левой стороне головного мозга выбирали левую половину среза, а для целевого местоположения справа выбирали только область среза, соответствующую правому полушарию головного мозга (удовлетворяя ограничению, что начальное положение должно быть на том же полушарии, что и целевое местоположение). После этого линии между каждой подходящей точкой на срезе и предварительно определяемым целевым местоположением, как описано выше, формируют возможные пути.
Согласно другому варианту осуществления изобретения, способ включает дополнительный этап отображения по меньшей мере одного возможного пути движения или по меньшей мере начального положения по меньшей мере одного возможного пути движения. В предпочтительном режиме графического представления вероятных начальных положений отображают представляющую интерес область вероятного начального положения(й), где начальное положение(я) пригодных путей отображают первым цветом, а начальное положение(я) других путей отображают вторым цветом. В частности, это может иметь форму окрашенной карты поверхности коры, где, например, первый цвет является зеленым, который указывает пригодные пути, которые удовлетворяют ограничениям, требующим избегать критических структур, а второй цвет является красным, который указывает другие (небезопасные) начальные положения. Если ткань представляет собой ткань головного мозга, окрашенная карта поверхности коры отображает возможные входные положения на черепе.
Предпочтительно возможный путь движения отображают в виде профиля интенсивности. Более предпочтительно профиль интенсивности отображают в связи с по меньшей мере одним изображением области вокруг локальных экстремумов, например, в виде миниатюрного изображения.
Согласно другому предпочтительному варианту осуществления изобретения, определяют приемлемый порог информации о локальных экстремумах интенсивности и/или вариации интенсивности для данного возможного пути или по меньшей мере частично определяют посредством смежных путей указанного данного возможного пути.
По другому аспекту настоящего изобретения профиль интенсивности вычисляют посредством интегрирования данных интенсивности по максимальному поперечному сечению устройства, перпендикулярному направлению движения вдоль возможного пути движения. Это интегрирование можно реализовать различными способами. В одном из вариантов осуществления значение интенсивности, которое ведет к наибольшему изменению интенсивности вдоль пути, используют для того, чтобы представлять поперечное сечение. В другом варианте осуществления множество путей рассматривают отдельно для того, чтобы принять решение о безопасности каждого отдельного пути. После этого безопасность поперечного сечения вычисляют как объединение всех отдельных путей.
Согласно другому аспекту изобретения, поперечное сечение можно задавать, чтобы соотнести с границей безопасности (задается как расстояние до ближайшей критической структуры) вокруг возможного пути. Внутри предварительно заданной площади поперечного сечения критическая структура, на которую указывают конкретные характеристики интенсивности, отсутствует.
В другом аспекте изобретения все возможные пути оценивают как безопасные или нет. После этого для каждого пути границу безопасности вычисляют посредством обнаружения ближайшего пути, который помечен как небезопасный. Затем для безопасных путей входные точки на поверхности головного мозга могут иметь цветовое кодирование как функцию вычисленной границы безопасности. Для небезопасных путей можно использовать отличающееся цветовое кодирование, которое может представлять собой функцию общего числа минимумов и максимумов интенсивности вдоль пути, или схему цветового кодирования, которая выделяет только либо минимумы интенсивности, либо максимумы интенсивности, либо и те и другие, которые можно наблюдать вдоль пути.
Изобретение дополнительно относится к машиночитаемому носителю информации, такому как запоминающее устройство, гибкий диск, диск CD, DVD, Blue-Ray или оперативное запоминающее устройство (RAM), содержащему набор инструкций, которые предписывают компьютеру осуществлять указанный выше способ, и компьютерному программному продукту, содержащему используемый компьютером носитель информации, содержащий используемый компьютером программный код, причем используемый компьютером программный код выполнен с возможностью исполнять указанный выше способ.
Изобретение также относится к компьютеризированной системе, содержащей блок обработки, память, интерфейс данных, дисплей и устройство ввода, причем система выполнена с возможностью осуществления указанного выше способа. Предпочтительно компьютеризированная система представляет собой систему CAD (диагностирования с компьютерным ассистированием) или CAS (хирургического вмешательства с компьютерным ассистированием).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут видны и разъяснены со ссылкой на варианты осуществления, описанные далее в настоящем документе.
На чертежах:
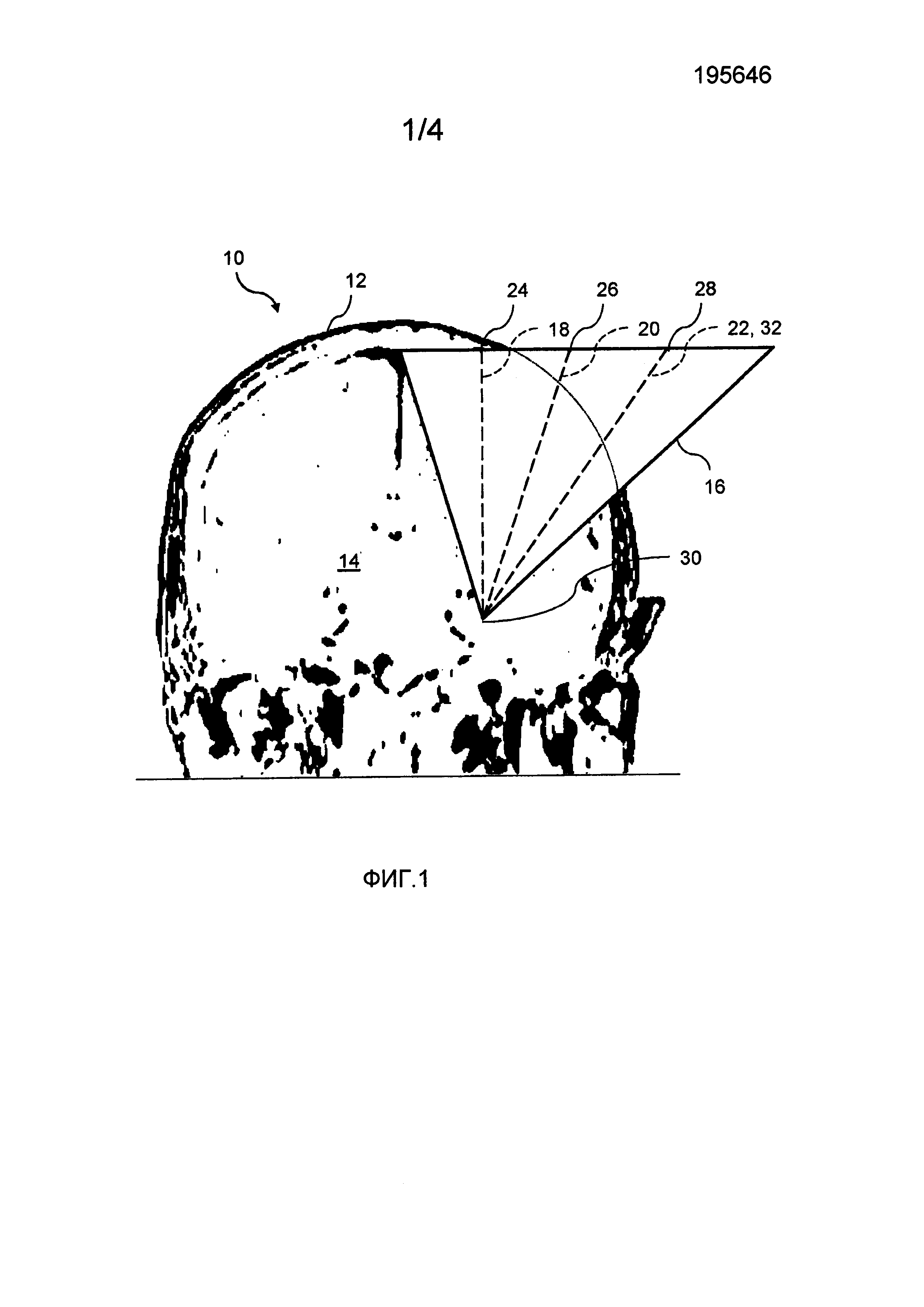
на фиг.1 представлен вид области поиска на коронарном срезе головы человека. Область вероятных путей движения состоит из множества вероятных путей (три из них показаны в явной форме), соединяющих соответствующие начальные положения с общим целевым местоположением;
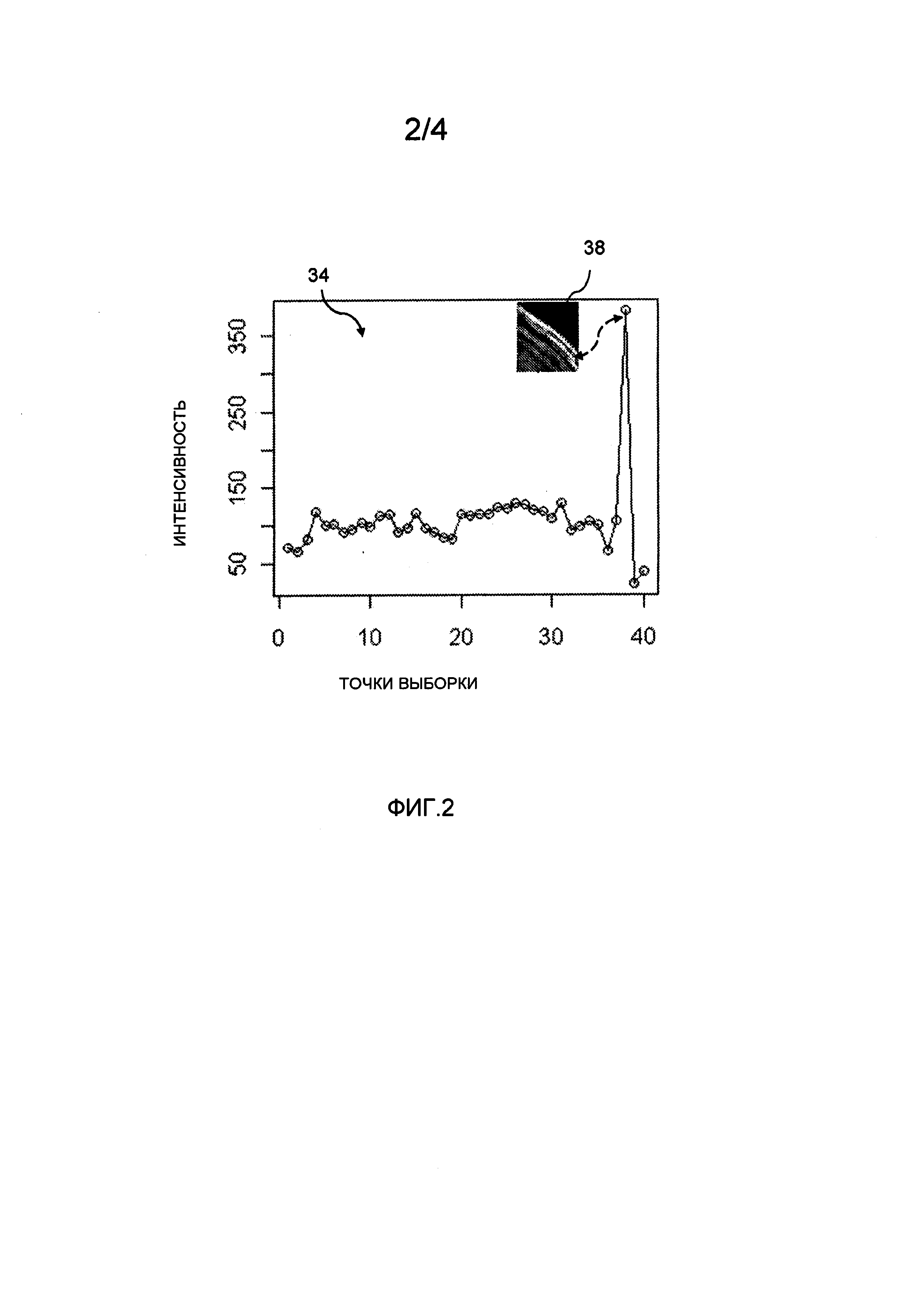
на фиг.2 представлен профиль интенсивности «безопасного» вероятного пути движения, который, следовательно, является пригодным путем движения;
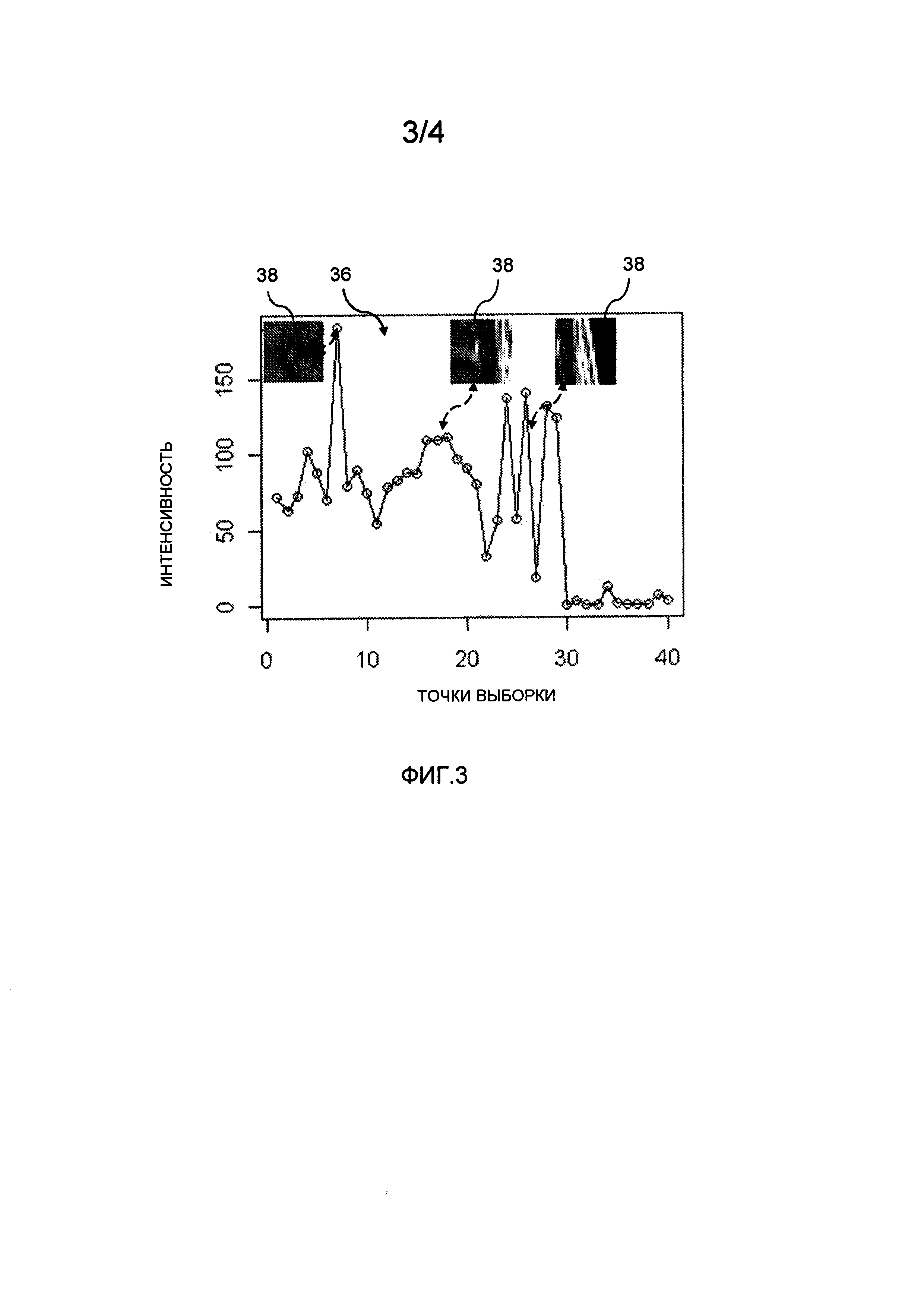
на фиг.3 представлен профиль интенсивности «небезопасного» вероятного пути движения; и
на фиг.4 представлен вид сверху головного мозга с визуализацией области вероятных путей, подразделенных на пригодные пути и небезопасные пути.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг.1 представлен вид области поиска на коронарном срезе головы 10 человека. На изображении показана верхняя часть черепа 12 и ткань 14 головного мозга внутри черепа 12. Область 16 возможных путей для движения объекта, такого как хирургическое или диагностическое устройство (не показано) в ткани 14 головного мозга, состоит из множества возможных путей 18, 20, 22 (три из них показаны в явной форме), соединяющих соответствующие вероятные начальные положения 24, 26, 28 с общим целевым местоположением 30.
Пригодный путь 32 для движения устройства в ткани 14 определяют посредством набора данных интенсивности, получаемых методом трехмерной магнитно-резонансной визуализации, пригодный путь 32 движения соединяет начальное положение 28 устройства с заданным целевым местоположением 30. Соответствующий способ определения включает этапы, на которых:
задают целевое местоположение 30 исходной точки устройства и выбирают по меньшей мере одно вероятное начальное положение 24, 26, 28 исходной точки устройства;
определяют по меньшей мере один возможный путь 18, 20, 22 движения между соответствующим вероятным начальным положением 24, 26, 28 и заданным общим целевым местоположением 30; и
оценивают возможный путь 18, 20, 22 движения в качестве пригодного пути 32 в зависимости от информации о локальных минимумах/максимумах (экстремумах) интенсивности и/или вариации интенсивности, возникающих из данных интенсивности вдоль возможного пути 18, 20, 22 движения.
Пригодный путь 32 для движения устройства в ткани 14 представляет собой безопасный путь, который не сталкивается с критической структурой (изображенной во вставках на фиг.3).
Для того, чтобы определять уровень безопасности возможного пути 18, 20, 22, анализируют профиль 34, 36 интенсивности (показанный на фиг.2 и 3) вдоль возможного пути 18, 20, 22 движения, основываясь на информации об экстремумах интенсивности и/или вариации интенсивности. Безопасный пригодный путь 32 не должен иметь большие максимумы или большие минимумы в области ткани (головного мозга). В целом существуют различные возможности для определения признака «большой».
Предпочтительный подход для обнаружения максимумов и/или минимумов этого типа представляет собой подход скользящего окна. В подходе скользящего окна для каждой точки или вокселя (объемного элемента, представленного точкой) центруют окно и максимальную и минимальную интенсивность внутри окна вычисляют для того, чтобы убедиться, что соответствующая точка/воксель, который должен быть локальным максимумом или минимумом, является глобальным максимумом или минимумом. После этого можно осуществлять какую-либо комбинацию следующих этапов:
- абсолютная разность между интенсивностью текущей точки или вокселя и интенсивностью целевого местоположения 30 должна находиться внутри стандартного отклонения интенсивности K* всей ткани (например, объема головного мозга). Коэффициент K можно точно указывать отдельно (например K=1), и он задает верхний и нижний порог интенсивности. Текущая точка или воксель представляет собой большой минимум, если интенсивность этой точки/вокселя ниже, чем нижний порог интенсивности, и большой максимум, если выше, чем верхний порог интенсивности.
- градиент по x, y, z для объема, окружающего текущую точку/воксель, вычисляют посредством взятия производных по x, y, z соответственно. Из производных вычисляют величину градиента для каждой точки/вокселя. Затем строят гистограмму из величин градиента. Некоторый процентиль (например, P=80%) гистограммы вычисляют и присваивают в качестве порогового значения. Указанная выше абсолютная разность между интенсивностью текущей точки/вокселя и интенсивностью в целевом местоположении 30 сравнивают с этим пороговым значением для того, чтобы найти минимум или максимум.
Целевое местоположение 30 устанавливают изначально (или находят в каком-либо месте), и поиск вероятного начального положения 24, 26, 28 начинают из этого целевого местоположения 30. По существу, значение интенсивности в целевом местоположении 30 уже известно, и его можно использовать для обнаружения минимумов и максимумов.
Если пиксель/воксель представляет собой максимум или минимум, он указывает на критическую структуру. После этого, учитывая некоторые пространственные ограничения, определяют, являются ли возможные пути 18, 20, 22 безопасными или небезопасными. Возможный путь 22 движения, который определен как безопасный, представляет собой пригодный путь 32. Критические структуры внутри показанной ткани головного мозга представляют собой сосуды, извилины и борозды, желудочки и/или функционально выразительные области.
В первой альтернативе определяют допустимые углы рыскания и тангажа пригодного пути 32. Выбранные углы удовлетворяют два ограничения: 1) начальное положение должно находиться на том же полушарии, что и целевое местоположение 30, и 2) поиск должен происходить в направлении верхней части головного мозга, а не боков или ниже целевого местоположения 30. Определив углы рыскания и тангажа внутри этого предварительно заданного углового диапазона, лучи из целевого местоположения 30 идут в направлении поверхности головного мозга, где расположены вероятные начальные положения 24, 26, 28. Наконец, профиль интенсивности каждого возможного пути (возможной траектории) 18, 20, 22 анализируют и помечают в качестве безопасных или небезопасных и/или дают непрерывное значение безопасности. Возможный путь 18, 20, 22, помеченный как безопасный или имеющий соответствующее значение безопасности, представляет собой пригодный путь 32.
Во втором подходе определяют срез в осевом направлении, который соответствует верхней части головы (непосредственно удовлетворяет ограничение, что поиск должен проходить в направлении верхней части головного мозга, а не боков или ниже целевого местоположения). Для целевого местоположения 30 на левой стороне головного мозга выбирают левую половину среза, а для целевого местоположения 30 на правой стороне выбирают только область среза, соответствующую правому полушарию головного мозга (удовлетворяет ограничение, что начальное положение должно находиться в том же полушарии, что и целевое местоположение). После этого линии между каждой подходящей точкой на срезе и предварительно определяемым целевым местоположением 30, как описано выше, формируют возможные пути 18, 20, 22.
На фиг.2 изображен профиль 34 интенсивности безопасного возможного пути 22 движения; на фиг.3 изображен профиль 36 интенсивности небезопасного возможного пути 20 движения. Соответствующий путь обоих профилей интенсивности начинается в целевом местоположении 30. Профиль 34 интенсивности на фиг.2 не демонстрирует больших флуктуаций (большие минимумы или большие максимумы за пределами порогов интенсивности, задаваемых стандартным отклонением интенсивности K* вокруг интенсивности целевого местоположения 30) интенсивности до конца пути, где имеет место выступающий максимум в профиле 34 интенсивности. Это ожидается, поскольку это соответствует интенсивности черепа 12, а не ткани головного мозга. Как результат, этот возможный путь 22 помечают как безопасный. Возможный путь на фиг.3 имеет пики (локальные максимумы) внутри области головного мозга; следовательно, его рассматривают как небезопасный. Только безопасный возможный путь 22 движения, соответствующий профилю 34 интенсивности, показанному на фиг.2, представляет собой пригодный путь 32.
Дополнительный аспект способа представляет собой усовершенствованную стратегию визуализации. В дополнение к профилям 34, 36 интенсивности пользователь также может видеть изображение 38 (миниатюрное изображение) области вокруг локальных максимумов или локальных минимумов, щелкая на графики, как показано на фиг.2 и 3. На обеих фигурах только максимумы связаны с миниатюрным изображением; однако как максимумы, так и минимумы можно визуализировать аналогичным образом. Кроме того, можно увеличивать размер миниатюрного изображения, чтобы получить больше информации о пространственном контексте.
В другом варианте осуществления на поиск траекторий можно добавлять ограничения, не связанные с интенсивностью. Это может иметь форму задания области поиска, как изложено на этапе обнаружения возможной входной точки. Область поиска также можно задавать посредством использования результата другого способа в форме карты, на которой задают допустимые и неприемлемые точки. Эту карту можно генерировать на основе анализа другой модальности, такой как fMRI, DTI, T2 и т.д. Ее также можно генерировать из того же MR T1 контраста, используемого для анализа траектории. Например, можно использовать результат корковой сегментации и маску головного мозга, чтобы ограничивать область поиска для обнаружения безопасной траектории.
На фиг.4 представлен вид сверху головного мозга с визуализацией представляющей интерес области 40, состоящей из вероятных начальных положений 24, 26, 28 возможных путей 18, 20, 22 внутри области 16 возможных путей; представляющая интерес область 40 подразделена на области 42 вероятных начальных положений 28 пригодных путей 32 и остальную область 44 небезопасных возможных путей 18, 20.
Пользователь соответствующей компьютерной системы, например, такой как хирург, может иметь вид головного мозга на дисплее системы, изображающий представляющую интерес область 40 (ROI) вероятных начальных положений 24, 26, 28, содержащую области 42, окрашенные зеленым цветом, для того, чтобы обозначить начальные положения 28 безопасных пригодных путей 32, и другую область 44, окрашенную красным цветом, для того, чтобы обозначить начальные положения 24, 26 небезопасных путей.
Если пользователь помещает курсор 46 на вероятное начальное положение, соответствующий график интенсивности (как показано на фиг.2 и 3) показывают в одном из вариантов осуществления изобретения. В примере, показанном на фиг.4, курсор 46 указывает на одну из областей 42 вероятных начальных положений 28 пригодных путей 32. Система будет изображать соответствующий профиль интенсивности «безопасного» пригодного пути 32 движения, например, показанный на фиг.2. В компьютерной системе, представляющей собой систему хирургического вмешательства с компьютерным ассистированием (CAS), курсор 46 будет повторять движение хирургического и/или диагностического устройства.
Несмотря на то, что изобретение проиллюстрировано и описано подробно на чертежах и в указанном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративные или примерные, а не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления. Специалисты в данной области смогут понять и выполнить другие вариации раскрытых вариантов осуществления посредством практического осуществления описываемого в заявке изобретения, изучив чертежи, описание и приложенную формулу изобретения. В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а формы единственного числа не исключают множества. Сам факт того, что определенные характеристики перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих характеристик не может быть использована с пользой. Номера позиций в формуле изобретения не следует толковать в качестве ограничения объема.

Правильная установка провода для гмс с первого раза
Система и способ передачи информации между имплантируемыми устройствами
Обратная связь по релевантности для извлечения изображения на основе контента
Визуализация хирургических траекторий
Правильная установка провода для гмс с первого раза
Система и способ передачи информации между имплантируемыми устройствами
Обратная связь по релевантности для извлечения изображения на основе контента
Визуализация хирургических траекторий

