Результат интеллектуальной деятельности: РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО, ДАТЧИК УГЛОВОЙ СКОРОСТИ И СПОСОБ ЭКСПЛУАТАЦИИ РЕГУЛИРУЮЩЕГО УСТРОЙСТВА С ГАРМОНИЧЕСКИМ СИГНАЛОМ НОМИНАЛЬНОГО ЗНАЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к регулирующему устройству, в частности к датчику угловой скорости, с гармонической задающей величиной или же с гармоническим сигналом номинального значения. Кроме того, изобретение относится к способу эксплуатации регулирующего устройства с гармонической задающей величиной.
Обычные методики регулирования приспособлены к задаче регулирования с постоянной или изменяющейся лишь медленно задающей величиной, при этом значение регулируемой величины, подвергающейся влиянию возмущающей величины, удерживается как можно более близко к заданному номинальному значению, или же проводится как можно более близко к изменяющемуся номинальному значению. Некоторые варианты применения, например микромеханические датчики угловой скорости для анализа кориолисовой силы, предусматривают возбуждение осциллятора с резонансной частотой и с определенной амплитудой колебания посредством регулирующего контура. При этом регулятор регулирует вырабатываемый им силовой сигнал таким образом, что исчезает разность между заданным гармоническим сигналом номинального значения и измеренным перемещением осциллятора.
Обычно при этом сигнал измерения, который отображает перемещение осциллятора вдоль направления возбуждения, вначале подводят в демодулятор. Демодулятор перемножает сигнал измерения с гармоническим сигналом с круговой частотой ωd, которая соответствует резонансной круговой частоте ω0 осциллятора. Собственно регулирование осуществляют при помощи постоянного, всегда независимого от резонансной круговой частоты сигнала номинального значения в первичной полосе частот. Затем выходной сигнал регулятора снова модулируют в модуляторе гармоническим сигналом с круговой частотой ωm, которая соответствует резонансной круговой частоте ω0 осциллятора. Результат модуляции сравнивают с заданным номинальным сигналом. Наконец, разность этих обоих сигналов управляет исполнительным органом, который на основании сигнала регулятора воздействует на осциллятор усилием таким образом, что он колеблется в соответствии с заданным номинальным колебанием. Регулирование в первичной полосе частот после модулятора осуществляет фильтр нижних частот результатов модуляции, в частности при двойной резонансной частоте, однако вследствие этого ограничивается ширина полосы пропускания регулятора и, таким образом, его скорость реакции на изменения отклонения.
В немецкой патентной заявке DE 102010055631.9, еще не опубликованной в момент подачи настоящей заявки, описано регулирование при помощи гармонического сигнала номинального значения в полосе частот резонансной круговой частоты ω0 осциллятора.
Во многих вариантах применения осциллятор после отключения привода продолжает колебаться с затухающей амплитудой. Если регулирование активируется в фазе затухания осциллятора, то время запуска в эксплуатацию зависит от разности фаз и амплитуд между затухающим колебанием и сигналом номинального значения.
Задачей изобретения является концепция регулирования с целью улучшения режима включения регулирующего устройства для гармонической задающей величины. Задача решена посредством предмета независимых пунктов формулы изобретения. Выгодные усовершенствования вытекают из соответствующих зависимых пунктов формулы изобретения.
Ниже при помощи чертежей описаны варианты выполнения изобретения, их принцип функционирования, а также их преимущества. Элементы вариантов выполнения могут комбинироваться друг с другом, если только они не исключают друг друга.
На чертежах показано:
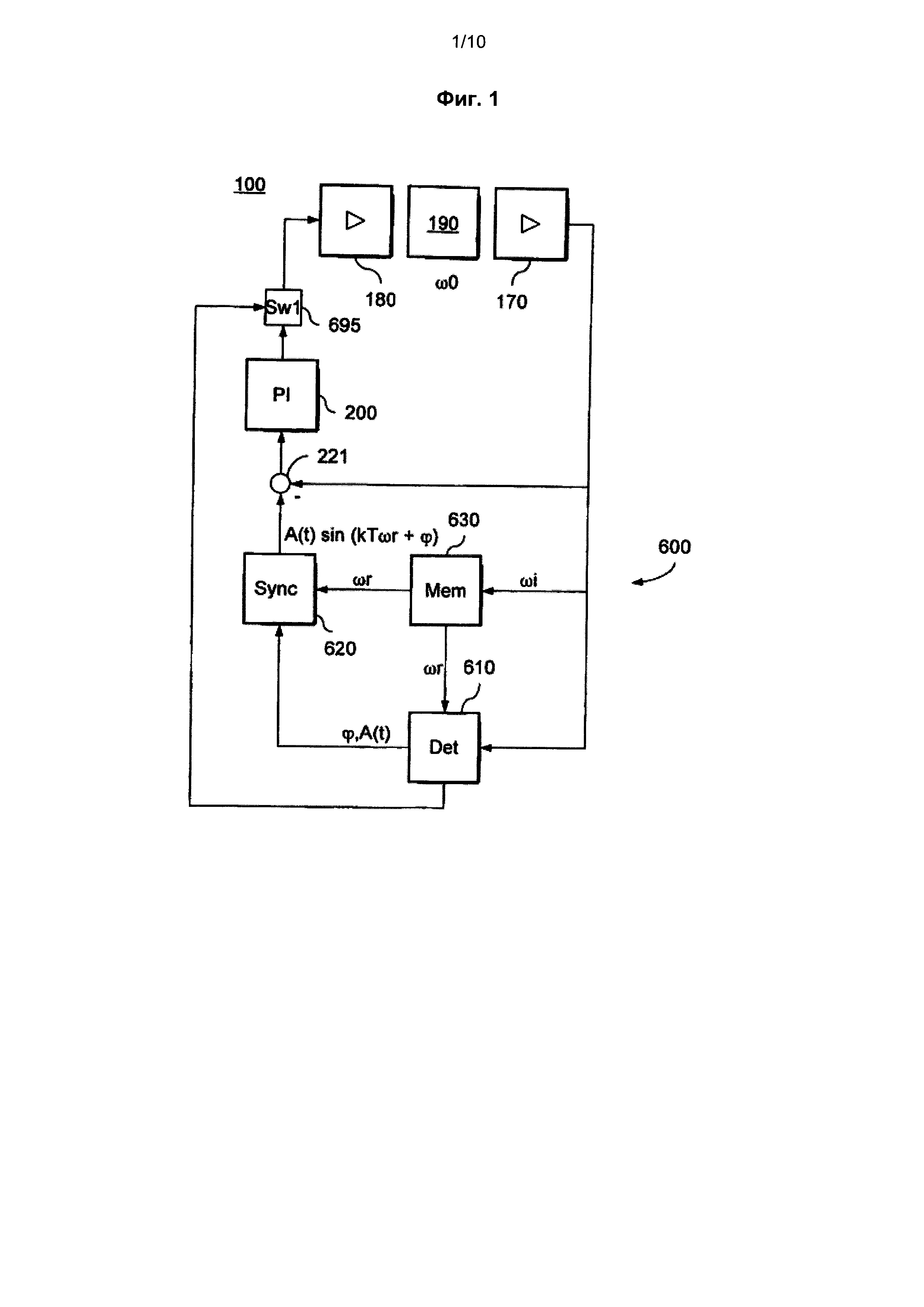
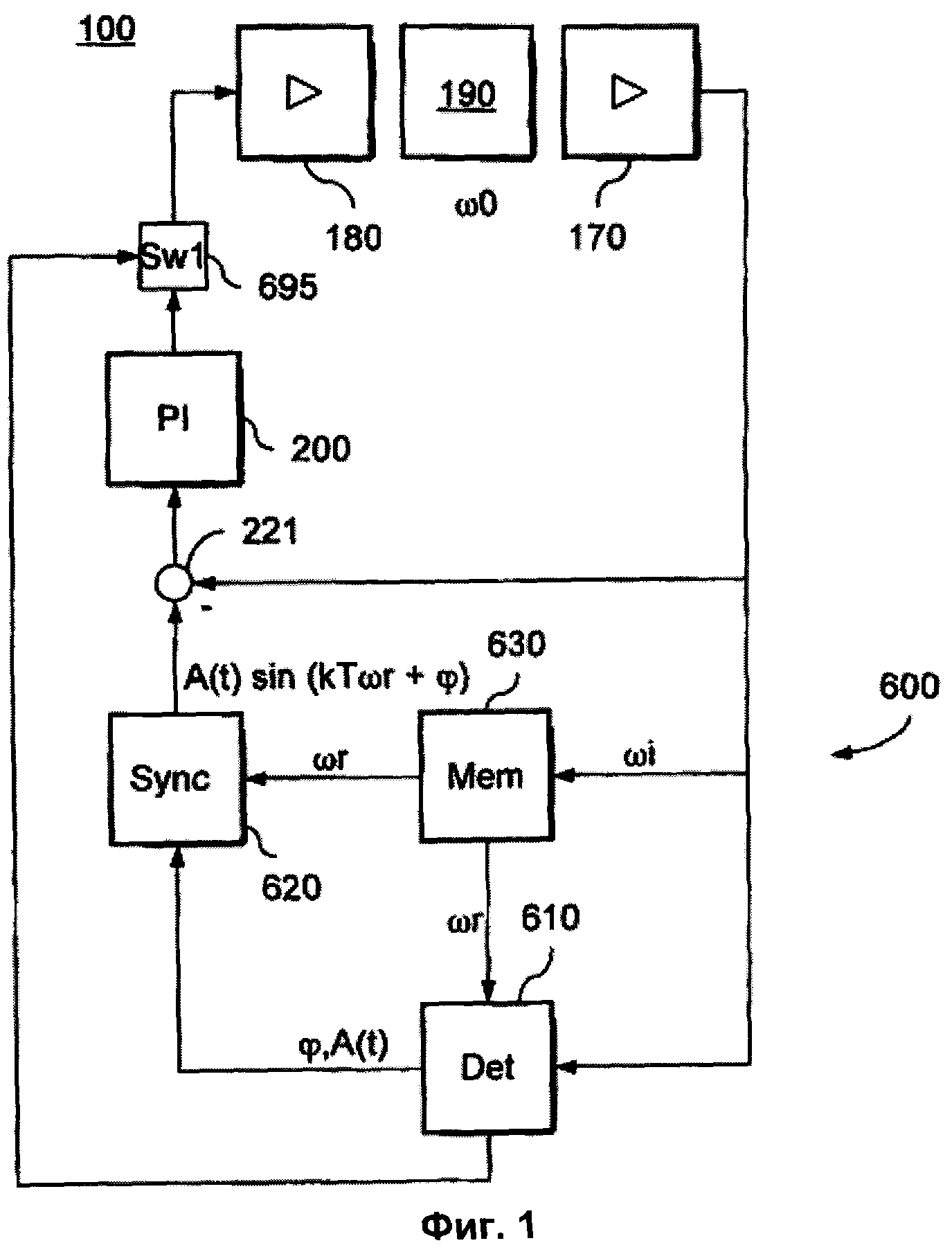
фиг. 1 - упрощенная блок-схема устройства, содержащего регулирующее устройство согласно одному варианту выполнения изобретения, которое включает в себя главный модуль регулятора для управления гармоническим колебанием на основании гармонического сигнала номинального значения и модуль расширения регулятора для синхронизации гармонического сигнала номинального значения,
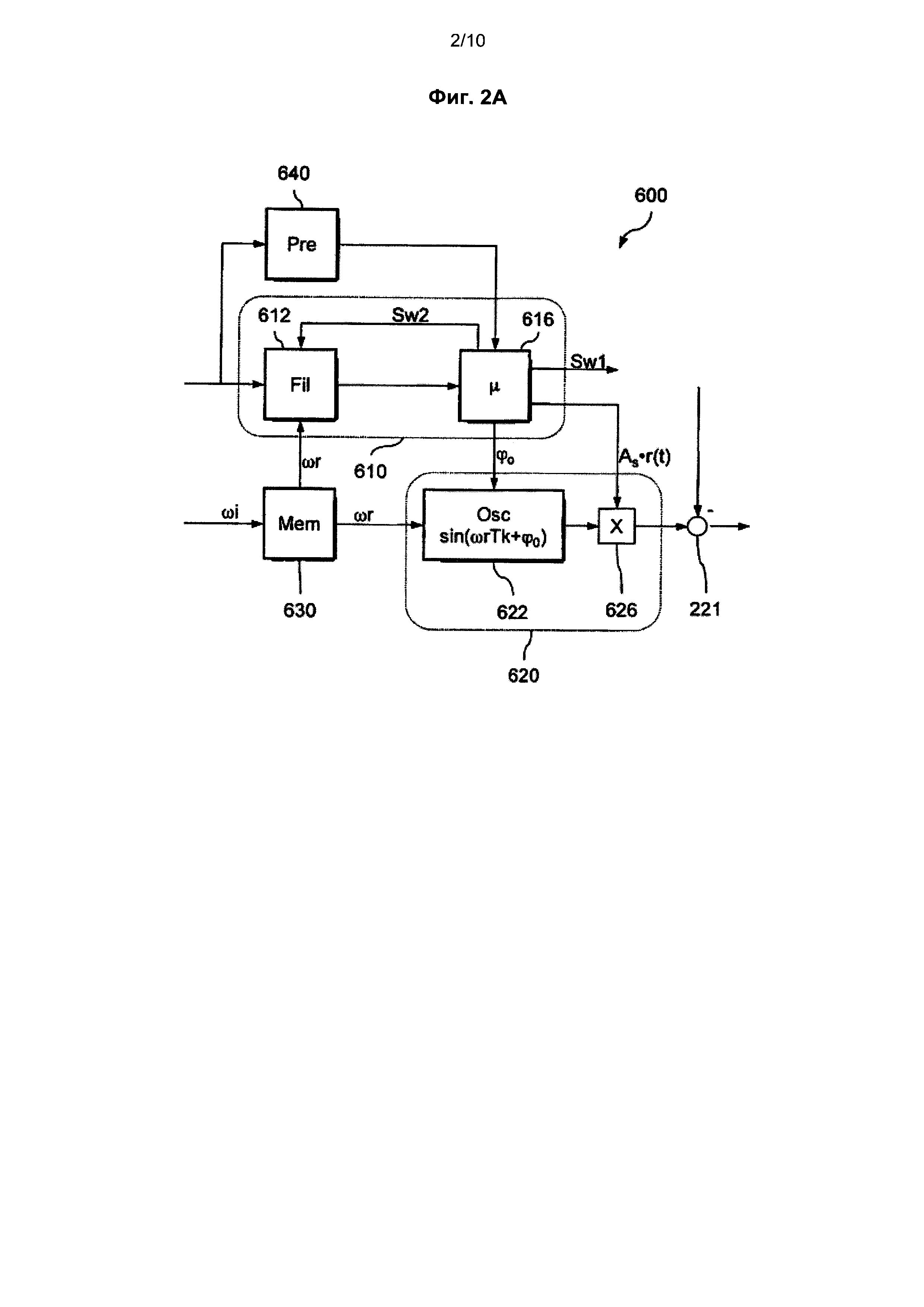
фиг. 2А - упрощенная блок-схема, содержащая подробности модуля расширения регулятора согласно фиг. 1, в соответствии со следующим вариантом выполнения,
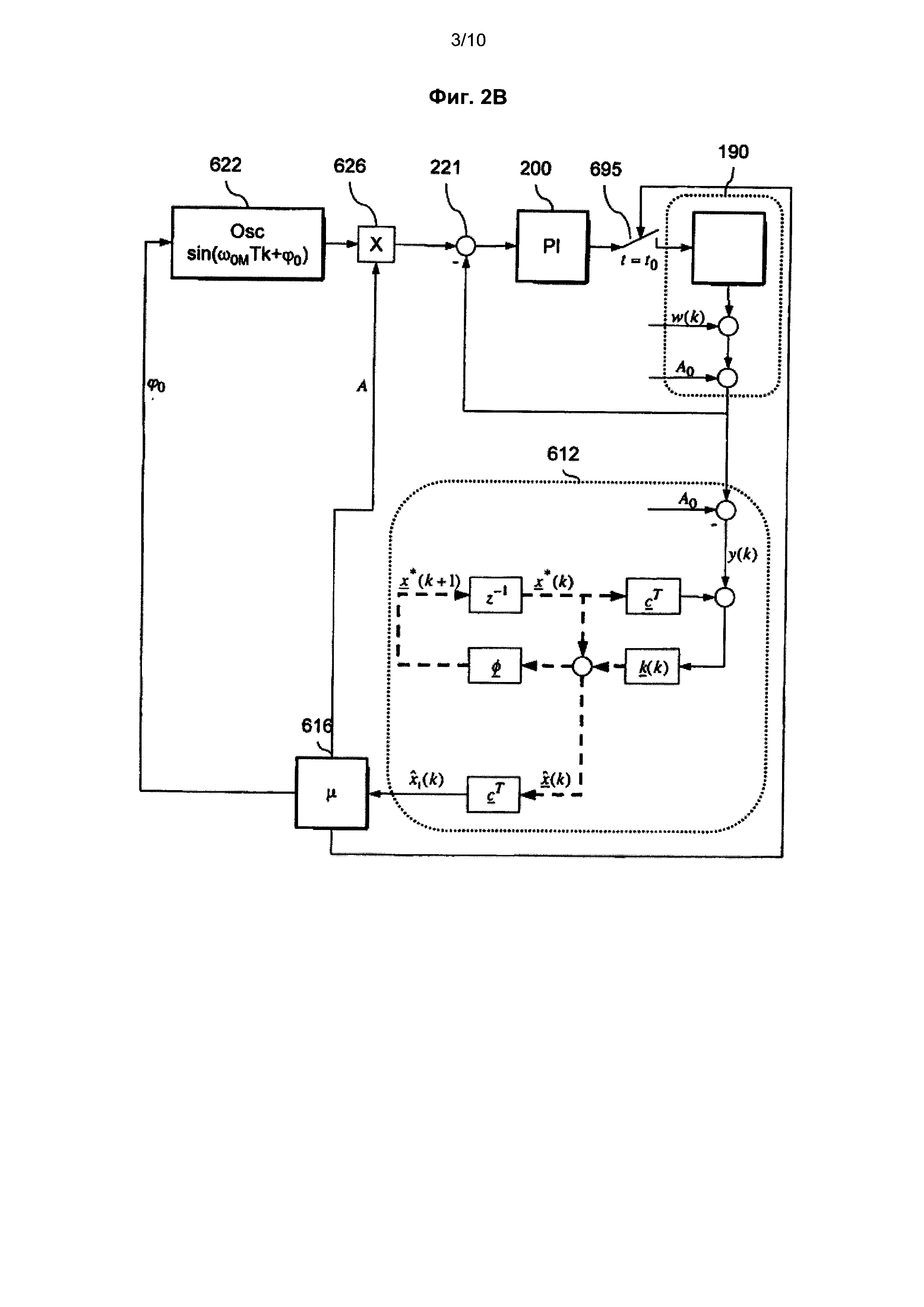
фиг. 2В - блок-схема, содержащая дополнительные подробности модуля расширения регулятора согласно фиг. 2А, в соответствии со следующим вариантом выполнения,
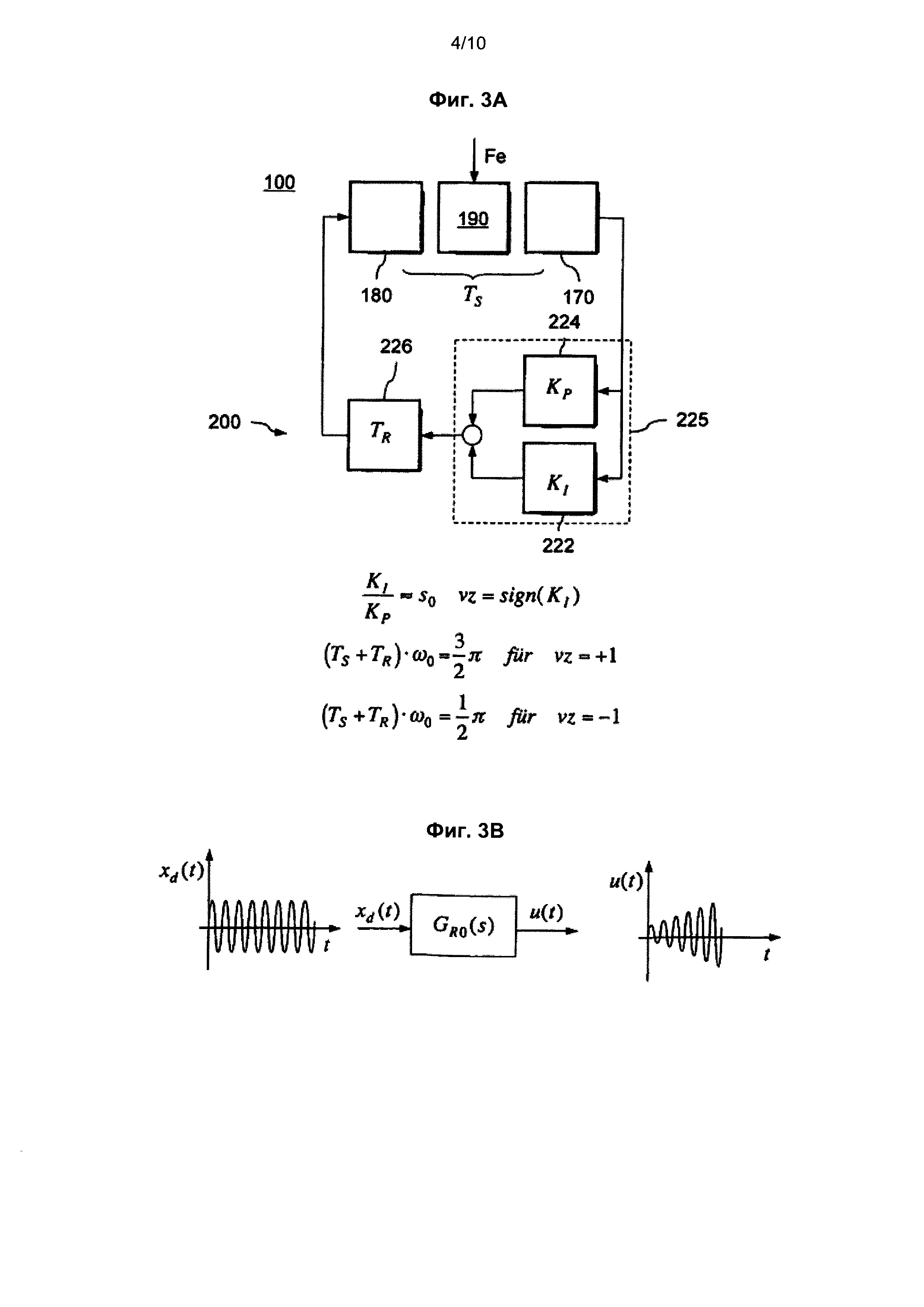
фиг. 3А - упрощенная блок-схема устройства, содержащего регулирующее устройство согласно варианту выполнения, который относится к главному модулю регулятора, содержащему непрерывный пропорционально-интегральный регулятор для гармонических сигналов номинального значения и звено с запаздыванием,
фиг. 3В - схематическое изображение передаточной функции пропорционально-интегрального регулятора согласно фиг. 3А,
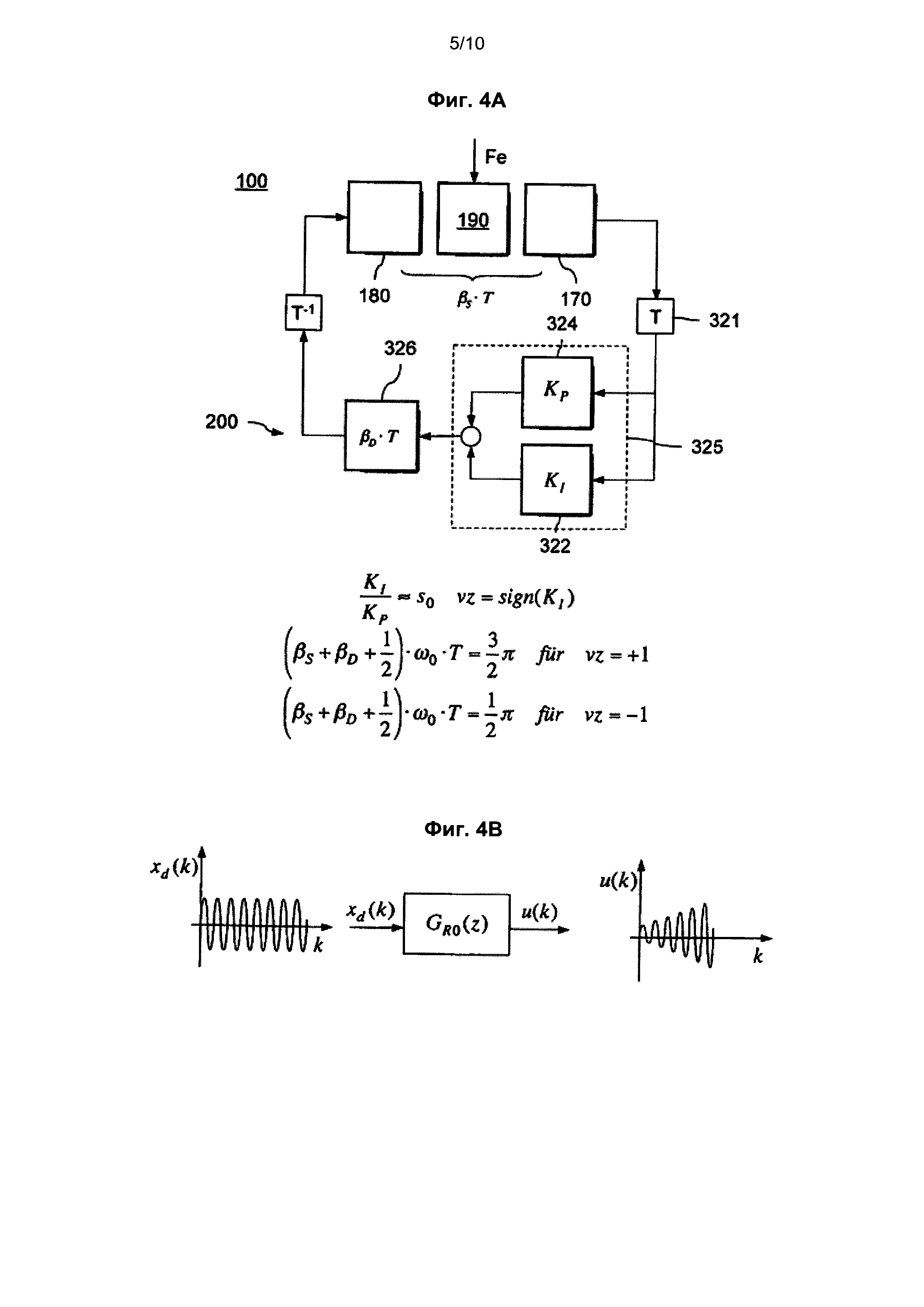
фиг. 4А - упрощенная блок-схема устройства, содержащего регулирующее устройство согласно варианту выполнения, который относится к главному модулю регулятора, содержащему дискретный пропорционально-интегральный регулятор для гармонических сигналов номинального значения и звено с запаздыванием,
фиг. 4В - схематическая иллюстрация передаточной функции главного модуля регулятора на фиг. 4А,
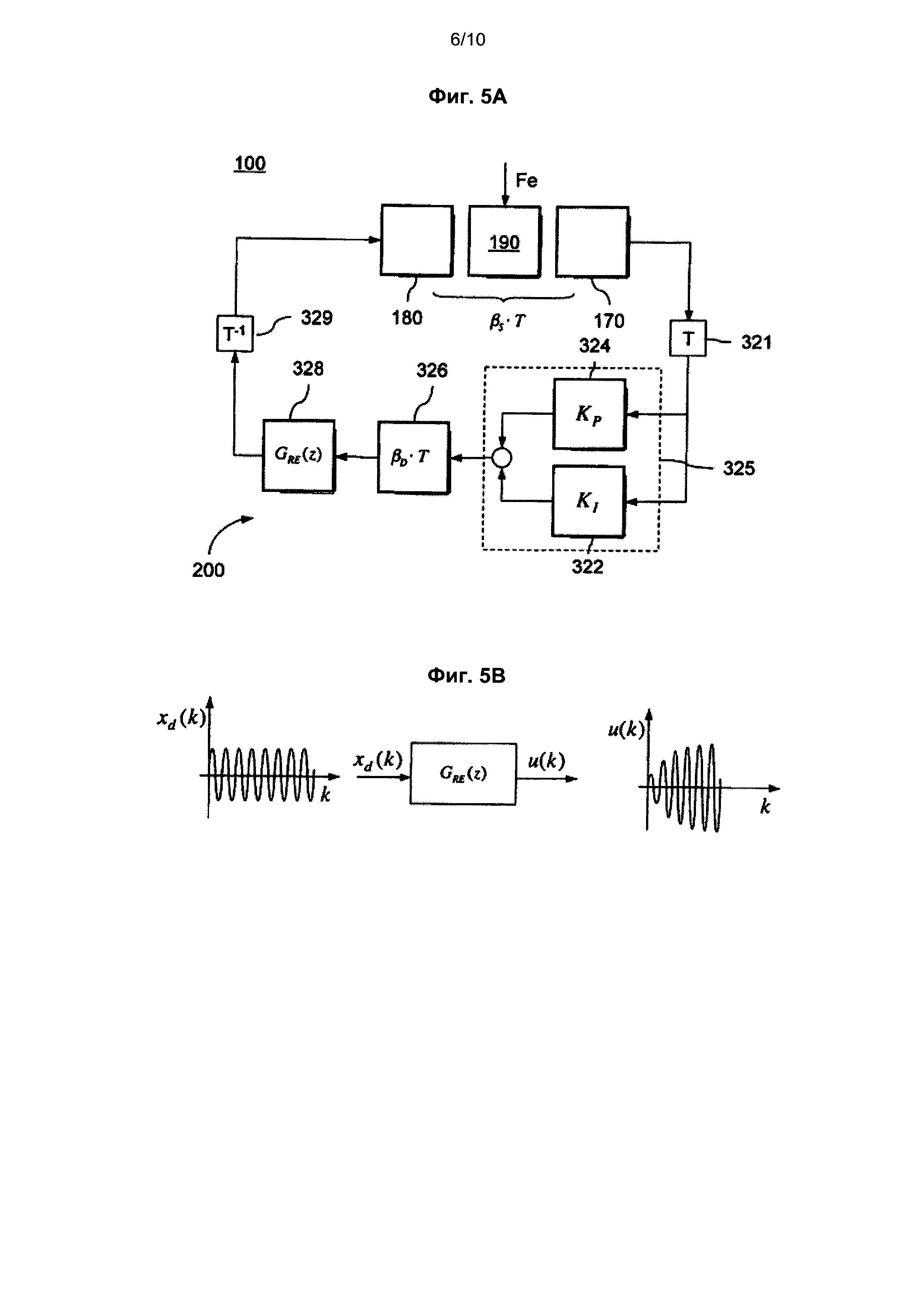
фиг. 5А - упрощенная блок-схема устройства, содержащего регулирующее устройство согласно варианту выполнения, который относится к главному модулю регулятора, содержащему дискретный пропорционально-интегральный регулятор для гармонических сигналов номинального значения и дополнение регулятора, действующее аналогично полосовому фильтру,
фиг. 5В - схематическое изображение передаточной функции дополнения регулятора согласно фиг. 5А,
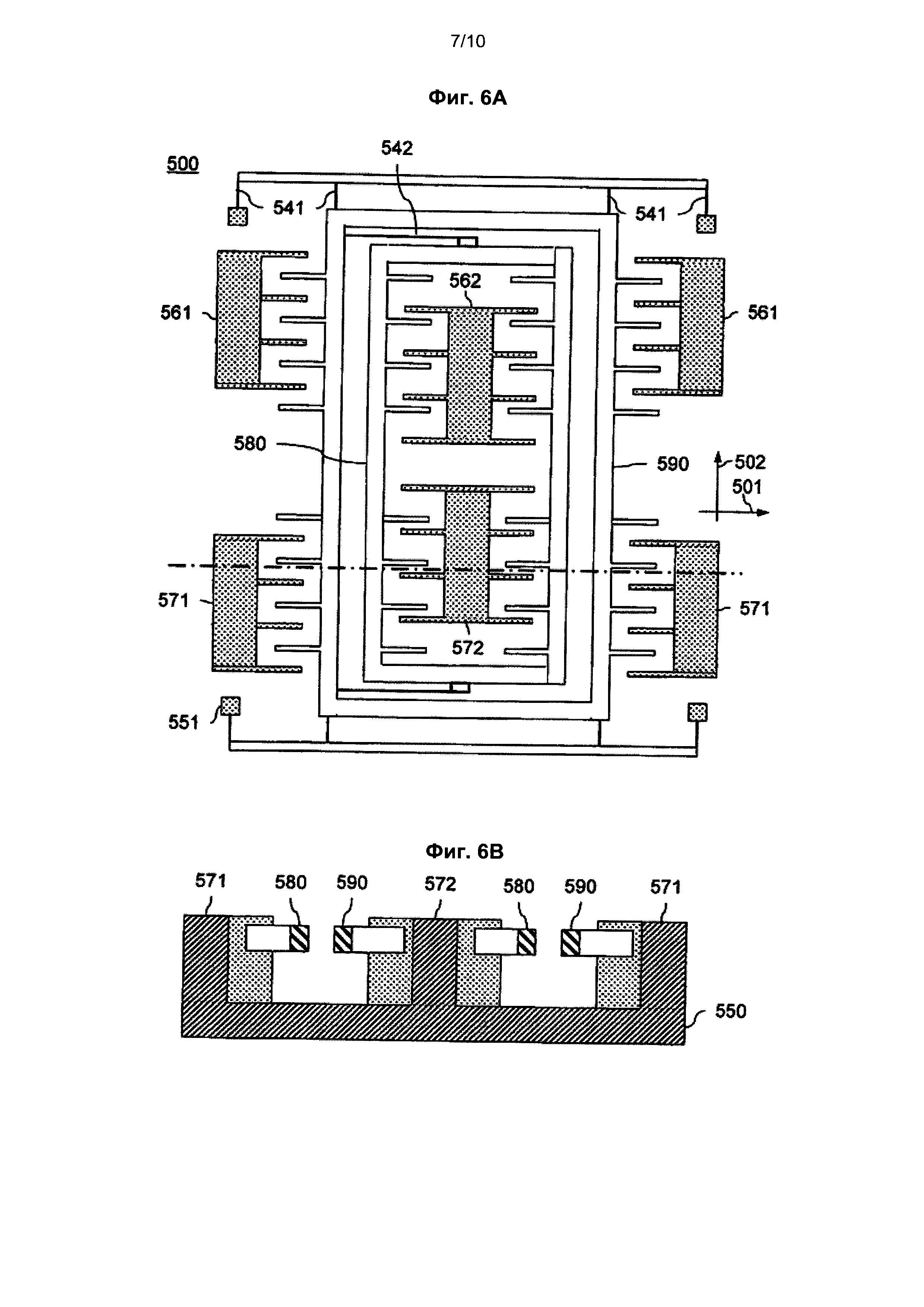
фиг. 6А - схематический вид сверху микромеханической части датчика угловой скорости согласно следующему варианту выполнения изобретения,
фиг. 6В - схематическое изображение в поперечном сечении микромеханической части датчика угловой скорости согласно фиг. 6А,
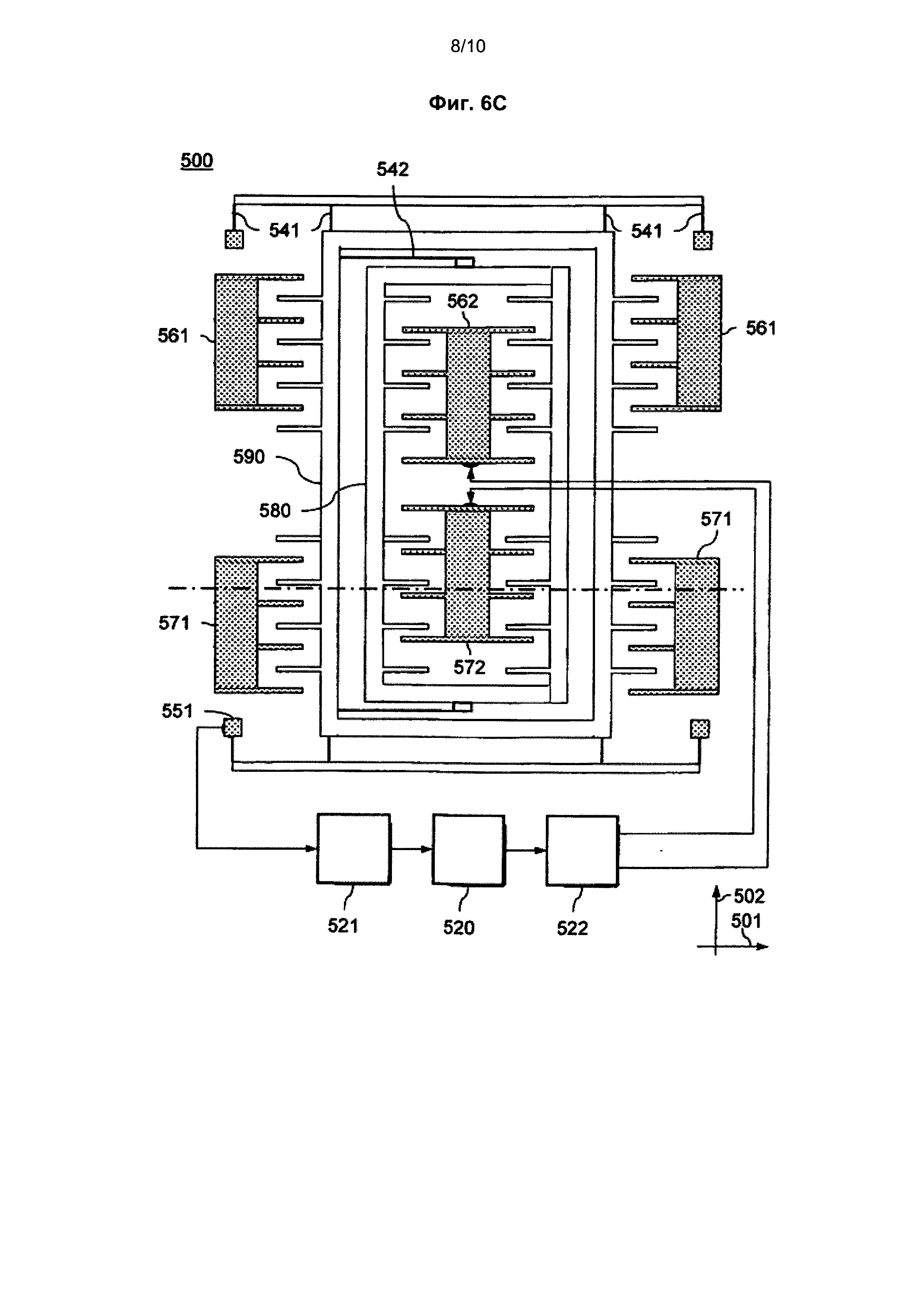
фиг. 6С - упрощенная блок-схема датчика угловой скорости согласно фиг. 6А и 6В,
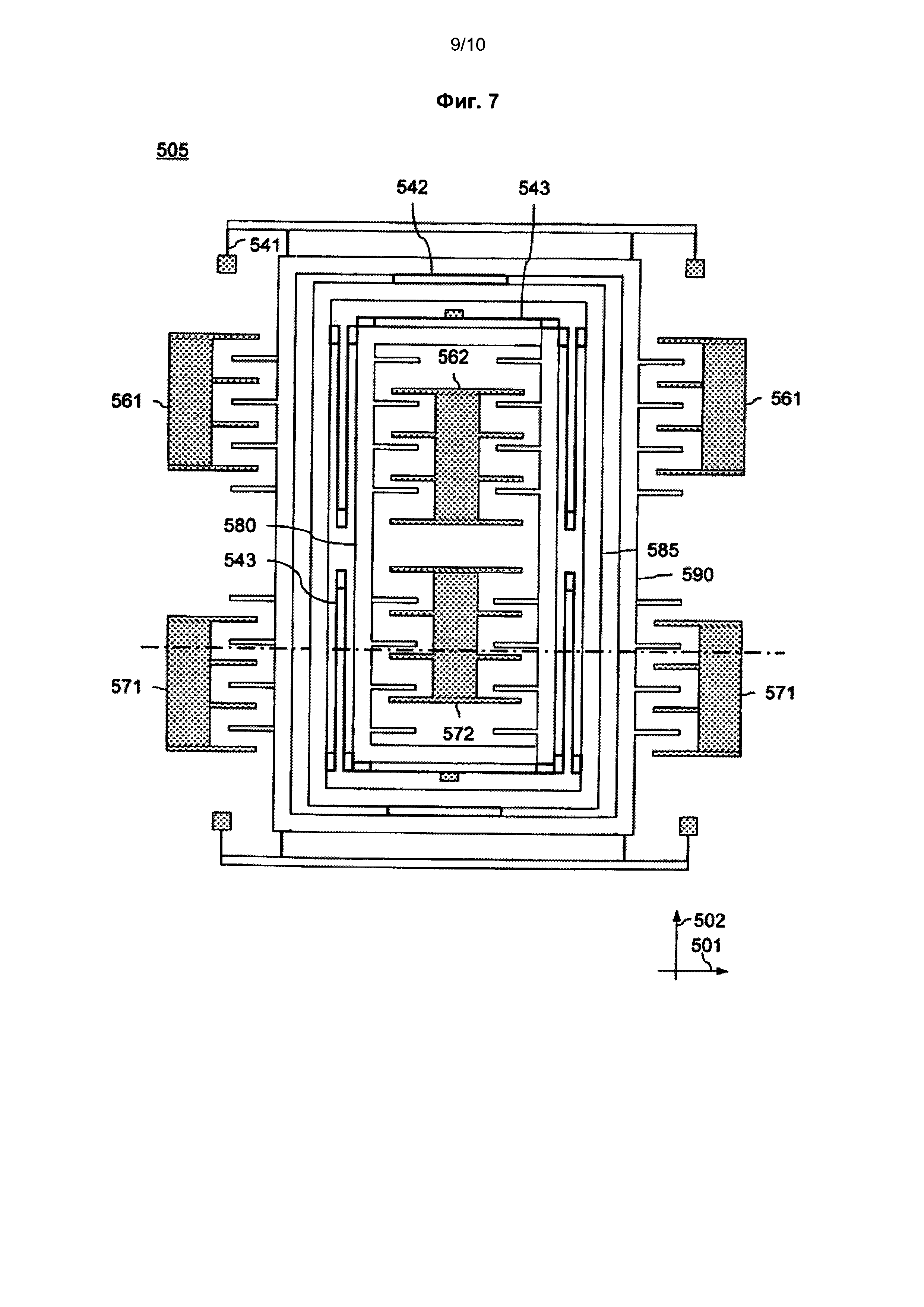
фиг. 7 - схематический вид сверху микромеханической части датчика угловой скорости согласно следующему варианту выполнения изобретения,
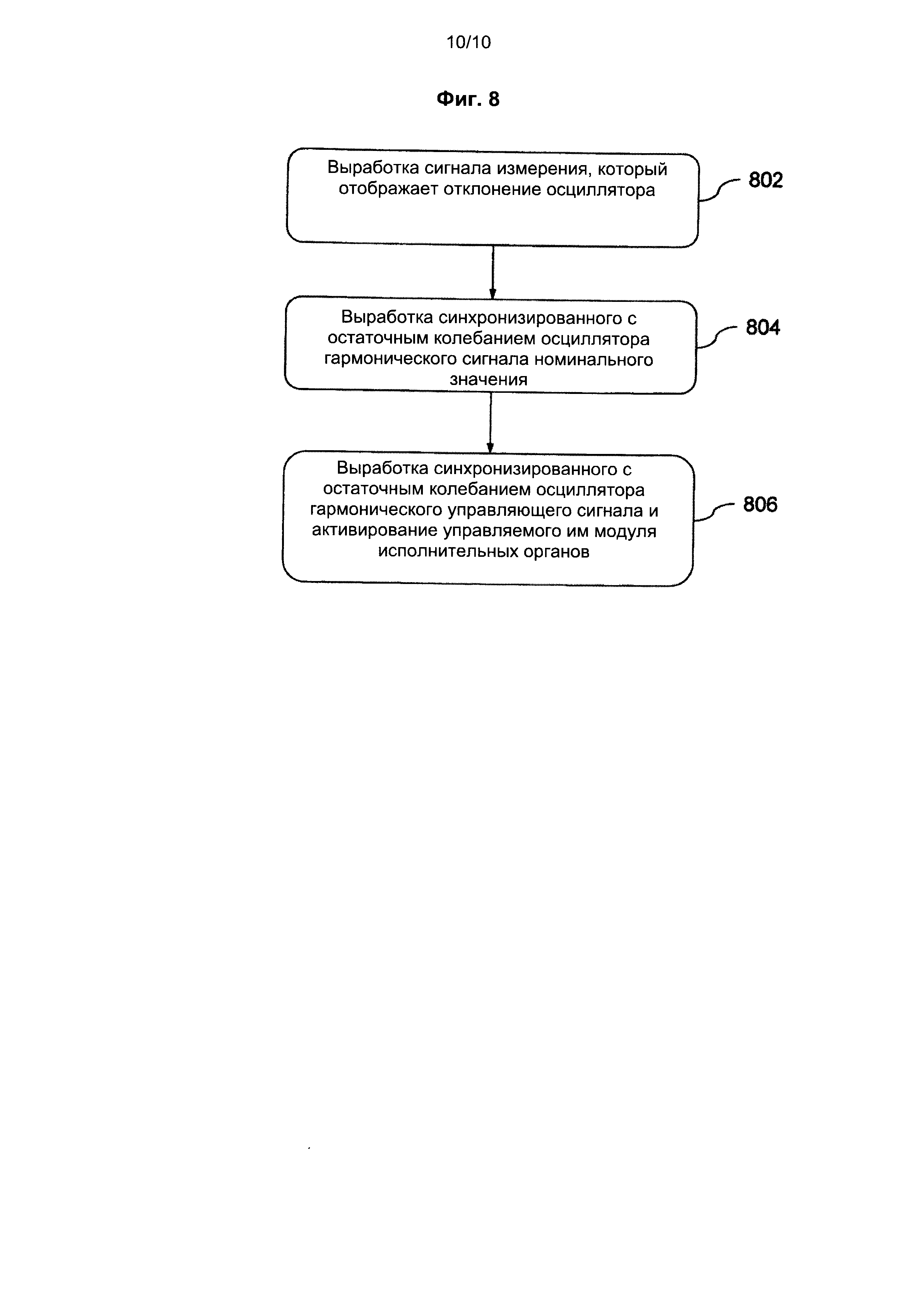
фиг. 8 - упрощенная структурная схема способа эксплуатации регулирующего устройства.
Показанное на фиг. 1 устройство 100 включает в себя осциллятор 190 и регулирующее устройство, содержащее главный модуль 200 регулятора и модуль 600 расширения регулятора. Осциллятором 190 является масса, которая подвешена с возможностью движения вдоль направления возбуждения и может колебаться вдоль него с резонансной частотой ω0. В стационарном случае осциллятор 190 совершает поступательное или вращательное колебание с резонансной круговой частотой ω0. Согласно одному варианту выполнения осциллятором 190 является модуль возбуждения, кориолисов модуль или модуль детектирования датчика угловой скорости. Датчик угловой скорости может быть выполнен, например, в виде MEMS (микроэлектромеханической системы).
Модуль 170 чувствительных элементов регистрирует перемещение осциллятора 190 и выдает сигнал измерения, который отображает общее отклонение осциллятора 190 вдоль направления возбуждения. Сигнал измерения соответствует входному сигналу для главного модуля 200 регулятора. Главный модуль 200 регулятора сравнивает входной сигнал регулятора с выдаваемым от модуля 600 расширения регулятора гармоническим сигналом номинального значения и образует на основании разности сигналов выходной сигнал регулятора, который выдается на модуль 180 исполнительных органов. Главный модуль 200 регулятора определяет выходной сигнал регулятора таким образом, что модуль 180 исполнительных органов вырабатывает силовой сигнал, так что исчезает разность между заданным гармоническим номинальным сигналом и измеренным перемещением осциллятора 190.
Согласно одному варианту выполнения модуль 600 расширения регулятора включает в себя модуль 695 активирования исполнительных органов, посредством которого может активироваться модуль 180 исполнительных органов. На блок-схеме согласно фиг. 1 модуль 695 активирования исполнительных органов показан в виде переключателя в подводе выходного сигнала регулятора к модулю 180 исполнительных органов, при этом переключатель выполнен с возможностью управления посредством выходного сигнала модуля 600 расширения регулятора.
Модуль 600 расширения регулятора активируется при помощи регулирующего устройства, например, посредством включения рабочего напряжения. Модуль 180 исполнительных органов вначале остается деактивированным. В зависимости от предшествующего периода, осциллятор 190 находится в покое или совершает при деактивированном модуле 180 исполнительных органов остаточное колебание. Модуль 600 расширения регулятора еще при деактивированном модуле 180 исполнительных органов определяет из сигнала измерения фактическую фазу и фактическую амплитуду такого остаточного колебания осциллятора 190 и выдает согласованный с фактической фазой и с фактической амплитудой синхронизированный гармонический сигнал номинального значения на главный модуль 200 регулятора. Как только будет иметься в распоряжении гармонический сигнал номинального значения или же выводимый из него синхронизированный управляющий сигнал, модуль 600 расширения регулятора активирует модуль 180 исполнительных органов посредством модуля 695 активирования исполнительных органов, таким образом, что амплитуда остаточного колебания осциллятора 190 синхронно по фазе усиливается до номинальной амплитуды, и при этом используется энергия, содержащаяся в остаточном колебании.
Модуль 600 расширения регулятора позволяет в очень короткое время довести осциллятор из всех возможных исходных состояний до его номинальной амплитуды и удерживать на ней. Остаточное колебание имеет место, в частности, тогда, когда осциллятор 190 после деактивирования привода или же модуля 180 исполнительных органов в произвольный момент времени в пределах времени затухания снова должен быть приведен в колебание с номинальной амплитудой.
Согласно одному варианту выполнения регулирующее устройство 200, 600 и осциллятор 190 являются составными частями датчика угловой скорости навигационного оборудования, в частности, навигационного оборудования для летательного аппарата, которое после кратковременного прекращения питания должно быть в максимально короткое время снова переведено в исправное рабочее состояние. Модуль 600 расширения регулятора оценивает амплитуду и фазовое положения имеющегося затухающего остаточного колебания осциллятора 190.
Согласно одному варианту выполнения модуль 600 расширения регулятора содержит фильтр Кальмана для оценки амплитуды и фазового положения. Из амплитуды и фазового положения остаточного колебания, с учетом внутреннего времени прохождения сигнала, выводят как начальную фазу, так и начальную амплитуду для синхронизированного по фазе и амплитуде подключения гармонического сигнала номинального значения. Имеющееся остаточное колебание подвергается использованию, так что продолжительность повторного запуска в эксплуатацию после кратковременного отключения сокращается. Чем больше амплитуда еще имеющегося остаточного колебания, тем меньше времени требуется, чтобы снова привести осциллятор в колебание с номинальной амплитудой. Таким образом, в частности, после кратковременного прекращения электропитания, сокращается время повторного запуска в эксплуатацию (время разгона) системы, включающей в себя регулирующее устройство 200, 600.
Согласно варианту выполнения, показанному на фиг. 1, модуль 600 расширения регулятора включает в себя модуль 610 регистрации и модуль 620 синхронизации. Модуль 610 регистрации определяет из сигнала измерения фактическую фазу и фактическую амплитуду остаточного колебания осциллятора 190, по меньшей мере в фазе пуска устройства 100, например, после повторного включения рабочего напряжения. Из фактической фазы и фактической амплитуды, а также дополнительных параметров системы, например, времени прохождения сигнала и времени задержки сигнала, модуль 610 регистрации определяет синхронизирующую информацию, которая задает фазу и амплитуду гармонического сигнала номинального значения, вырабатываемого модулем 620 синхронизации. Модуль 620 синхронизации принимает синхронизирующую информацию и передает определенный посредством синхронизирующей информации гармонический сигнал номинального значения в главный модуль 200 регулятора. Например, главный модуль 200 регулятора содержит суммирующий модуль 221, который из выдаваемого от модуля 620 синхронизации гармонического сигнала номинального значения и сигнала измерения образует дифференциальный сигнал.
Согласно одному варианту выполнения резонансная круговая частота ωr гармонического сигнала номинального значения задана резонансной круговой частотой ω0 осциллятора 190, причем эта частота используется также в качестве начального значения при оценке фактической фазы и фактической амплитуды. Согласно другому варианту выполнения модуль 600 расширения регулятора включает в себя модуль регистрации температуры, при этом в модуле 610 регистрации в основу оценки фактической фазы и фактической амплитуды положена скорректированная с учетом температуры резонансная круговая частота осциллятора 190, и гармонический сигнал номинального значения имеет скорректированную с учетом температуры резонансную круговую частоту.
Согласно варианту выполнения, показанному на фиг. 1, модуль 600 расширения регулятора включает в себя запоминающий модуль 630 частоты, который сохраняет с интервалами времени частотную информацию, описывающую текущую частоту колебания осциллятора 190. Согласно одному варианту выполнения запоминающий модуль 630 частоты периодически сохраняет мгновенную резонансную круговую частоту в энергонезависимом запоминающем устройстве. Например, частота обновления выбрана таким образом, что она может следовать за типовыми для применения изменениями температуры. Согласно одному варианту выполнения частота обновления находится в диапазоне от 1 Гц до 100 Гц, например, приблизительно 10 Гц.
Модуль 600 расширения регулятора опрашивает частотную информацию для оценки фактической фазы и фактической амплитуды остаточного колебания осциллятора 190 и/или применяет сохраненную в нем частотную информацию для генерирования гармонического сигнала номинального значения, например, для управления осциллятором, вырабатывающим сигнал номинального значения. В существенные для повторного включения промежутки времени, то есть, в пределах времени затухания колебания осциллятора 190, температура и, таким образом, резонансная круговая частота осциллятора 190, едва ли изменяются, так что последнее сохраненное при текущей работе в энергонезависимом запоминающем устройстве значение приводной частоты после повторного пуска представляет собой достаточно хорошее приближенное значение фактической резонансной круговой частоты осциллятора 190 и может использоваться в качестве начального значения для регулирования. Например, осцилляторы в микромеханических датчиках угловой скорости имеют постоянные времени в области 10 с. После отключения силового возбуждения, например, после пропадания рабочего напряжения, осциллятор еще колеблется с амплитудой примерно 5% от номинальной в течение примерно 30 с.
Согласно одному варианту выполнения смешанное программное управление модуля 610 регистрации управляет модулем 695 активирования исполнительных органов таким образом, что модуль 180 исполнительных органов активируется только тогда, когда модуль 600 расширения регулятора выдает синхронный по фазе и амплитуде гармонический сигнал номинального значения. Согласно одному варианту выполнения модулем 695 активирования исполнительных органов является переключающее устройство, например, цифровой коммутатор, который выдает на модуль 180 исполнительных органов выходной сигнал главного модуля 200 регулятора лишь тогда, когда последний выдает синхронный по фазе и амплитуде гармонический сигнал номинального значения.
Согласно следующему варианту выполнения модуль 610 регистрации, самое позднее, после определения синхронизирующей информации, деактивирует те отдельные модули модуля 600 расширения регулятора, которые уже более не требуются.
На фиг. 2А показаны подробности модуля 610 регистрации. Согласно одному варианту выполнения модуль 610 регистрации включает в себя фильтрующий модуль 612. Например, аналоговый сигнал измерения считывают с периодом Т дискретизации и при этом преобразуют в цифровой сигнал измерения. На основании дискретных значений сигнала измерения фильтрующий модуль 612 определяет оценочное значение дисперсии измерительных шумов, содержащихся в сигнале измерения, и оценочное значение постоянного смещения амплитуды сигнала измерения, а также оценочные значения временной характеристики остаточного колебания, например, ожидаемые переходы через нуль. При этом согласно одному варианту выполнения фильтрующий модуль 612 использует частотную информацию, которая, например, считывается из запоминающего модуля 630 частоты. Управляющий модуль 616 на основании оценочных значений временной характеристики остаточного колебания определяет синхронизирующую информацию, основанную на фактической фазе и фактической амплитуде. При этом управляющий модуль 616 учитывает задержку, вызванную фильтрацией, требуемыми расчетами и задержками переходных процессов. Управляющий модуль 616 рассчитывает начальную фазу φ0 и начальное значение AS амплитуды гармонического сигнала номинального значения, и момент t0 времени, к которому рассчитанный таким образом гармонический сигнал номинального значения будет одинаковым по фазе с фактическим колебанием осциллятора 190.
Модуль 620 синхронизации включает в себя, например, управляемый колебательный контур 622, фаза которого является управляемой. Согласно одному варианту выполнения управляемой является также частота осциллятора. Например, частота осциллятора является управляемой в зависимости от температуры, так что можно отслеживать зависящее от температуры изменение гармонической резонансной круговой частоты осциллятора 190. Согласно другому варианту выполнения резонансная круговая частота ωr колебательного контура 622 задана посредством последней записи в запоминающий модуль 630 частоты. Информация о последней сохраненной частоте может подводиться в колебательный контур 622 либо непосредственно из запоминающего модуля 630 частоты, либо посредством управляющего модуля 616.
Амплитуду гармонического сигнала номинального значения подвергают управлению таким образом, что она согласно временной функции r(t) повышается от начального значения AS амплитуды, соответствующей подвергнутой оценке фактической амплитуде колебания осциллятора, до номинального значения амплитуды гармонического колебания осциллятора 190. Например, для этого управляющий модуль 616 выдает ступенчатый пилообразный сигнал с начальным значением подвергнутой оценке фактической амплитуды и конечным значением номинальной амплитуды, временная характеристика и/или постоянная времени которого согласована с фактической фазой.
Модуль 626 умножения перемножает сигнал AS·r(t) амплитуды с выходным сигналом колебательного контура 622. В точке 221 суммирования образуется разность между гармоническим сигналом номинального значения и сигналом измерения. Согласно одному варианту выполнения управляющий модуль 616 отключает фильтрующий модуль 612, как только его результаты будут переданы в управляющий модуль 616. Отключение фильтрующего модуля 612 уменьшает, например, потребление тока. Дополнительно, при реализации в микропроцессоре, требующаяся для оценки вычислительная мощность может освобождаться для вычислительных операций, требующихся при нормальной работе устройства. Согласно другому варианту выполнения управляющий модуль 616 управляет модулем 695 активирования исполнительных органов согласно фиг. 1 таким образом, что модуль 180 исполнительных органов включается к моменту времени t0.
Согласно одному варианту выполнения модуль 600 расширения регулятора включает в себя модуль 640 входного каскада. Модуль 640 входного каскада из сигнала измерения определяет, не находится ли амплитуда А остаточного колебания ниже минимального порогового значения Axmin. Если это имеет место, то исходят из того, что осциллятор уже не совершает существенного остаточного движения, и он может без проблем запускаться из состояния покоя. Согласно одному варианту выполнения при этом гармонический сигнал номинального значения запускается с начальной амплитудой AS=Axmin. Фазовое положение при пуске из состояния покоя является произвольным, и частота гармонического сигнала номинального значения может определяться, например, из информации о температуре и линейной температурной модели осциллятора 190, или считываться из запоминающего модуля 630 частоты. Согласно одному варианту выполнения модуль 640 входного каскада определяет из некоторых периодов колебания максимальное значение Amax и минимальное значение Amin, и рассчитывает из значений Amax и Amin приближенные значения мгновенной амплитуды А колебания и мгновенного смещения A0 колебания согласно уравнениям 1 и 2:

Модуль 600 расширения регулятора реализован, например, в виде цифровой интегральной схемы, например, в виде ASIC (проблемно ориентированной интегральной схемы), DSP (цифрового сигнального процессора) или FPGA (программируемой логической матрицы). Модуль 600 расширения регулятора и главный модуль 200 регулятора могут быть выполнены в одном и том же или в различных конструкционных элементах. Согласно следующему варианту выполнения модуль 600 расширения регулятора и главный модуль 200 регулятора полностью или частично являются программами, которые выполняются компьютером или микропроцессором.
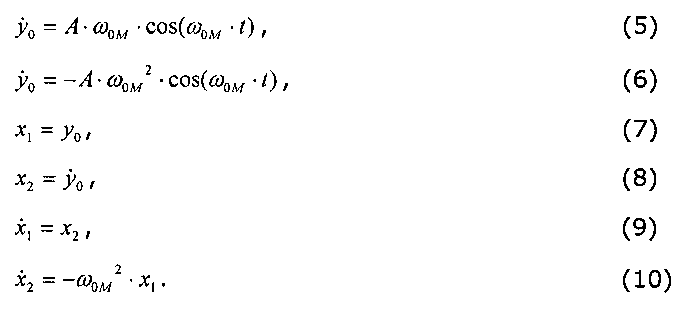
Согласно одному варианту выполнения фильтрующим модулем 612 является фильтр Кальмана. Оценка значений амплитуды и фазы происходит быстрее по сравнению с постоянной времени затухания осциллятора на несколько порядков величины. Поэтому согласно одному варианту выполнения перемещение y0 осциллятора упрощенно представляют в виде недемпфированного гармонического колебания:

Сигнал y*(t) измерения наряду с собственно перемещением y0 осциллятора дополнительно содержит неизбежные измерительные шумы w и постоянное смещение A0:

Перемещение y0(t) осциллятора рассматривают как решение системы дифференциальных уравнений, содержащей уравнения (5)-(10):
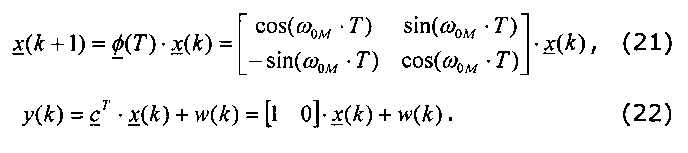
Описание состояния этой системы может быть дано в матричном виде при помощи уравнения (11) следующим образом:

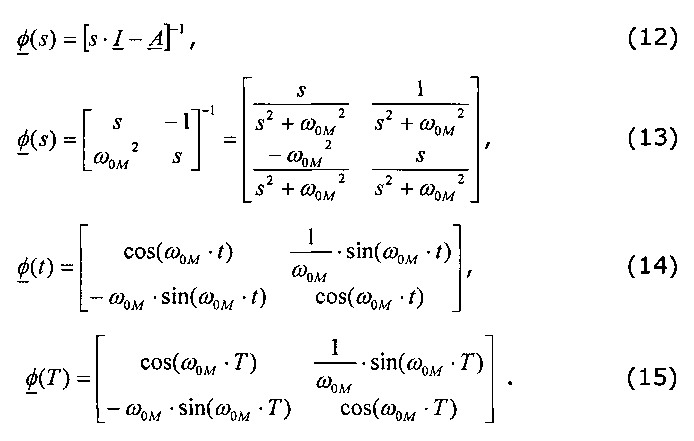
Чтобы получить систему уравнений в конечных разностях, описанную выше систему подвергают дискретизации в соответствии с применяемым периодом дискретизации сигнала измерения. Это отображается при помощи преобразования Лапласа:
Поэлементно система уравнений в конечных разностях может быть записана следующим образом:
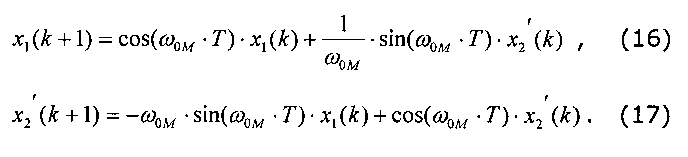
Чтобы упростить решение и реализацию, напрашивается нормирование параметра х2′ состояния при помощи ω0M следующим образом:
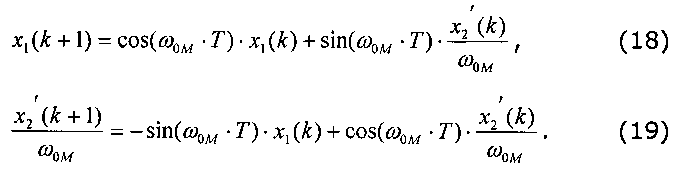
При помощи новой переменной состояния:

описание состояния дискретизированной системы может быть записано следующим образом:
Для дисперсии измерительного шума w в дальнейшем используется символ R.
Основываясь на содержащих шумы значениях y* измерения, для получения оценочного значения  для фактического состояния
для фактического состояния  системы согласно одному варианту выполнения применяют фильтр Кальмана. Фильтр Кальмана может быть описан при помощи следующего набора уравнений:
системы согласно одному варианту выполнения применяют фильтр Кальмана. Фильтр Кальмана может быть описан при помощи следующего набора уравнений:
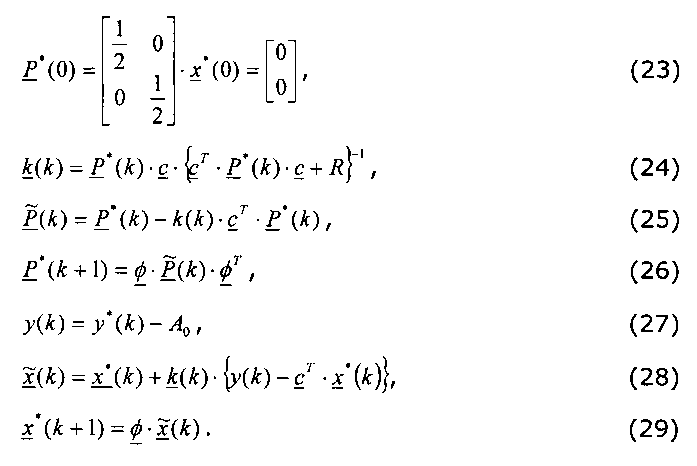
Поэлементно уравнения фильтра Кальмана могут быть записаны при помощи уравнений (30)-(42), которые приведены ниже. При этом используется симметричность матриц  и
и  :
:
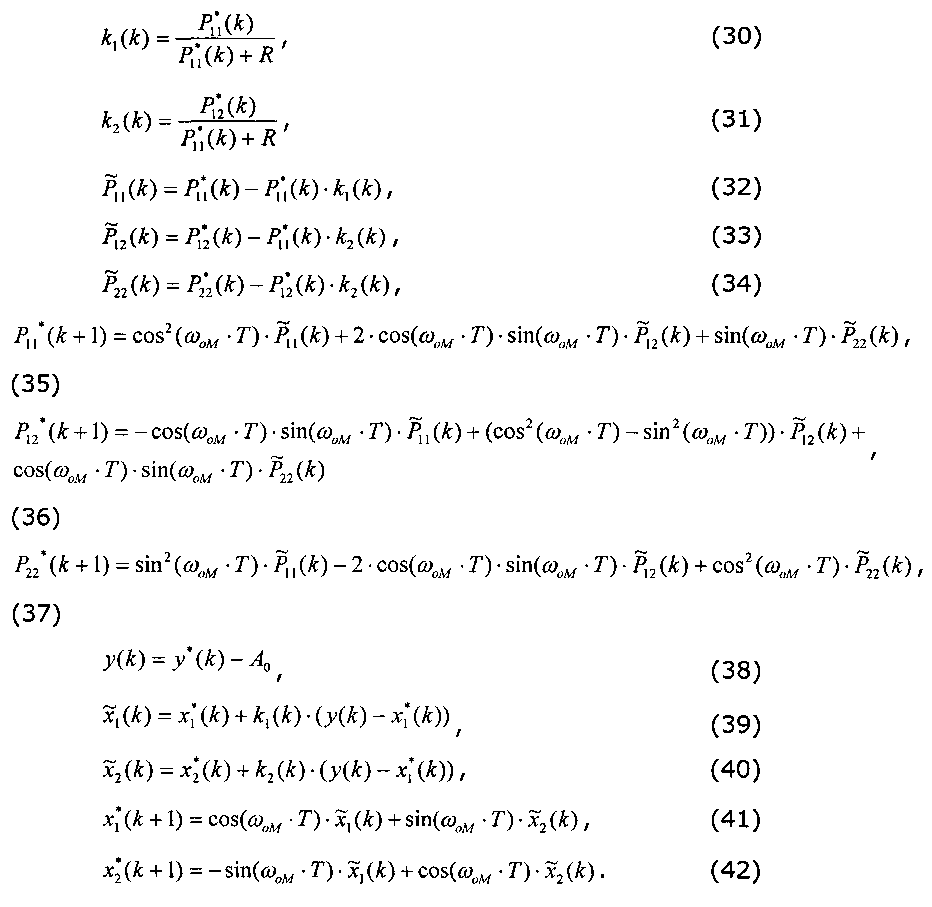
Переход через нуль от отрицательных до положительных значений подвергнутого оценке сигнала  используют, чтобы запустить номинальный сигнал регулирования амплитуды синхронно по фазе. Таким образом, нулевую точку времени выбирают таким образом, что она совпадает с обнаруженным переходом через нуль. При этом подвергнутый оценке сигнал является пропорциональным величине sin(ωoM·Т·k).
используют, чтобы запустить номинальный сигнал регулирования амплитуды синхронно по фазе. Таким образом, нулевую точку времени выбирают таким образом, что она совпадает с обнаруженным переходом через нуль. При этом подвергнутый оценке сигнал является пропорциональным величине sin(ωoM·Т·k).
Сигнал номинального значения регулирования амплитуды должен запускаться точно в переходе через нуль подвергнутого оценке сигнала с начальной фазой, равной 0. Однако, поскольку в распоряжении имеются лишь дискретные значения с временным разрешением Т, то в общем случае нельзя точно попасть в переход через нуль. Поэтому согласно одному варианту выполнения из дискретного значения  перед переходом через нуль и дискретного значения
перед переходом через нуль и дискретного значения  , после перехода через нуль путем линейной интерполяции согласно уравнению (43) определяют дополнительно учитываемую фазу Δφ0:
, после перехода через нуль путем линейной интерполяции согласно уравнению (43) определяют дополнительно учитываемую фазу Δφ0:

Эта фаза действует только лишь на последующем рабочем цикле, что приводит к подлежащей дополнительному учету задержке. Кроме того, должны учитываться дополнительные зависящие от реализации задержки в обработке сигнала (например, при регистрации измеренных значений). Эти дополнительные задержки принимают в виде кратного периода дискретизации с коэффициентом nosz. Таким образом, требуемая начальная фаза φ0 получается согласно уравнению (44):

На фиг. 2 показаны подробности фильтра Кальмана, используемого в качестве фильтрующего модуля 612 регулирующего устройства.
В случае, если система состоит из нескольких осцилляторов (например, в блоке инерциальных измерений (IMU), из трех датчиков угловой скорости), и приводы осцилляторов должны запускаться совместно, посредством общей электроники, переходы осцилляторов через нуль не обязательно находятся в одном и том же такте дискретизации. Поэтому для тех осцилляторов, которые уже обнаружили свой переход через нуль, для каждого дополнительного такта дискретизации начальную фазу увеличивают на ω0M·Т. Это происходит до тех пор, пока последний осциллятор не обнаружит свой переход через нуль.
Например, как только будет обнаружено условие синхронизации (переход через нуль измеренного сигнала осциллятора) по меньшей мере для одного из этих датчиков, может запускаться привод этого датчика согласно описанному выше методу. Подключение остальных датчиков может затем осуществляться, как только будет выполнено их индивидуальное условие синхронизации. При этом момент времени для подключения привода выбирается индивидуально для всех датчиков. Согласно другому варианту выполнения с общей электроникой, при котором возможен только совместный момент времени включения привода, ожидают до тех пор, пока не будет выполнено условие синхронизации для всех датчиков. Так как условие синхронизации может подвергаться анализу один раз за такт дискретизации, то для каждого датчика, условие синхронизации которого уже достигнуто, на каждый добавочный такт дискретизации к начальной фазе добавляют относящуюся к такту дискретизации фазу ω0M·Т.
В показанном на фиг. 3А варианте выполнения с целью пояснения принципа действия, лежащего в основе главного модуля 200 регулятора, описан аналоговый вариант его выполнения в пределах устройства 100. Главный модуль 200 регулятора включает в себя пропорционально-интегральный регулятор 225 для гармонических задающих величин или же гармонических сигналов номинального значения, содержащий интегрирующее передаточное звено 222 с коэффициентом KI интегрирования, и пропорциональное передаточное звено 224 с коэффициентом KP усиления. Пропорционально-интегральный регулятор 225 для гармонических задающих величин вырабатывает из модулированного по амплитуде скачкообразной функцией гармонического колебания с постоянной амплитудой на входе регулятора гармоническое колебание с такой же частотой и пропорциональной времени амплитудой на выходе регулятора.
Фиг. 3В иллюстрирует преобразование синусоидально модулированного скачкообразного сигнала xd(t) в гармонический выходной сигнал u(t) с пропорциональной времени амплитудой посредством передаточной функции GR0(s) пропорционально-интегрального регулятора 225. Описанный режим пропорционально-интегрального регулятора предполагает назначение параметров K1 и KP регулятора, описанное ниже. Уравнение (45) дает взаимосвязь между выходным сигналом u(t) регулятора и входным сигналом xd(t) регулятора для xd(t)=σ(t):

Преобразования Лапласа выходного сигнала u(t) регулятора и входного сигнала xd(t) регулятора получаются из уравнений (46а) и (46b):
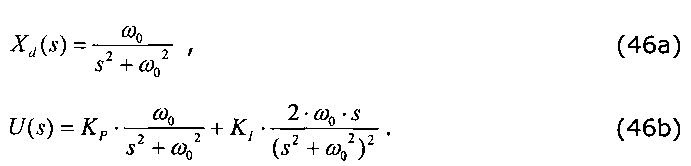
В соответствии с этим, передаточная функция GR0(s) пропорционально-интегрального регулятора 225 для гармонических сигналов номинального значения получается согласно уравнению (47):

Характерным для непрерывного пропорционально-интегрального регулятора 225 является получающийся из обобщенной интегральной части комплексно сопряженный полюс при s=±jω0. При гармоническом колебании с частотой ω0 на входе регулятора пропорционально-интегральный регулятор 225 не образует на выходе регулятора смещение фазы. Поэтому для установления произвольной фазы главный модуль 200 регулятора дополнительно включает в себя звено 226 с запаздыванием, имеющее время TR запаздывания и включенное последовательно с пропорционально-интегральным регулятором 225. В соответствии с этим, передаточная функция GR(s) главного модуля 200 регулятора получается согласно уравнению (48):
Параметры KI, KP регулятора выбирают таким образом, что нулевые точки регулятора в передаточной функции регулятора согласно уравнению (48) компенсируют комплексно сопряженный полюс в передаточной функции объекта регулирования согласно уравнению (49):

Посредством сравнения коэффициентов уравнений (49) и (48) для определения параметров KI, KP регулятора получаются уравнения (50а) и (50b):

Согласно одному варианту выполнения демпфирование s0 и резонансную круговую частоту ω0 осциллятора 190 выбирают таким образом, что s0<<ω0, и, таким образом, уравнение (50b) выполняется с очень хорошим приближением. Из уравнения (50а) в качестве условия назначения величины отношения коэффициента интегрирования KI к коэффициенту усиления KP получается уравнение (50с):

Передаточная функция GK(s) скорректированного открытого контура получается из произведения передаточной функции GS(s) объекта регулирования и передаточной функции GR(s) регулятора. Так как при соответствующем назначении параметров согласно уравнениям (50b), (50 с) выражения для комплексно сопряженного полюса объекта регулирования и для комплексно сопряженной нулевой точки регулятора сокращаются, получается передаточная функция GK(s) скорректированного открытого контура согласно уравнению (51):

При регулировании с помощью традиционного пропорционально-интегрального регулятора в фазово-частотной характеристике скорректированного открытого контура при частоте ω=ω0 происходит скачок фазы от +90° до -90°. В противоположность этому, в пропорционально-интегральном регуляторе 225, рассчитанном для гармонических задающих величин, при частоте ω0 происходит скачок фазы на 180°, который однако не обязательно осуществляется между +90° и -90°. Поэтому согласно одному варианту выполнения время запаздывания TR регулятора выбирают таким образом, что скачок фазы на 180° осуществляется максимально точно при ω0, например, посредством того, что параметры регулятора назначают согласно уравнению (52а):

Если смещение фазы, вызванное только временем TS запаздывания объекта регулирования, при ω0 меньше 90°, то часть фазы в размере 180° может также образовываться посредством инвертирующего регулятора. В этом случае фазы, вызванные временем TR запаздывания регулятора и временем TS запаздывания объекта регулирования, при ω0 лишь дополняются до  . При этом условие назначения величины времени TR запаздывания регулятора имеет вид:
. При этом условие назначения величины времени TR запаздывания регулятора имеет вид:

Из частотной характеристики скорректированного открытого контура при помощи критерия Найквиста можно сделать заключение о свойствах стабильности замкнутого контура. Скорректированный открытый контур состоит из обобщенного интегратора и комбинации времени TS запаздывания объекта регулирования и времени TR запаздывания регулятора. Посредством надлежащего назначения величины времени TR запаздывания регулятора согласно одному из уравнений (14а) или (14b) фазовая характеристика при частоте ω0 имеет скачок на 180° от +90° при более низких частотах ω<ω0 до -90° при более высоких частотах ω>ω0. Передаточная функция GW(s) замкнутого контура получается из передаточной функции GK(s) скорректированного открытого контура:

Если время TR запаздывания регулятора определяют согласно уравнению (52а), то замкнутый контур является стабильным именно тогда, когда амплитудно-фазовая характеристика скорректированного открытого контура при 0≤ω≤ω0 не окружает точку -1 и не проходит через нее.
Если в противоположность этому, время TR запаздывания регулятора определяют на основании уравнения (52b), и пропорционально-интегральный регулятор 225 вырабатывает фазу в размере 180°, то замкнутый контур является стабильным именно тогда, когда амплитудно-фазовая характеристика скорректированного открытого контура начинается на отрицательной действительной оси при значении, большем -1.
В интервале 0≤ω≤ω0 эквивалентная характеристика пересекает линию 0 дБ при частоте прохождения, при этом расстояние частоты прохождения от ω0 определяет ширину полосы пропускания замкнутого контура. При помощи коэффициента KP усиления эквивалентная частотная характеристика и, таким образом, частота прохождения, могут сдвигаться в направлении оси ординат, так что получающаяся ширина полосы пропускания замкнутого контура может регулироваться. Согласно одному варианту выполнения коэффициент KP усиления выбирают в рамках заданных критериями стабильности границ таким образом, что ширина полосы пропускания является максимальной.
Обобщенно, главный модуль 200 регулятора включает в себя пропорционально-интегральный регулятор 225 для гармонических задающих величин, к которому подводят гармонический сигнал номинального значения, и который содержит пропорциональное передаточное звено 224 с коэффициентом KP усиления и интегрирующее передаточное звено 222 с коэффициентом KI интегрирования. Коэффициент KI интегрирования и коэффициент KP усиления выбраны таким образом, что в s-плоскости нулевая точка передаточной функции пропорционально-интегрального регулятора 225 и комплексно сопряженный полюс передаточной функции объекта регулирования, описывающей осциллятор 190, взаимно компенсируются.
Согласно одному варианту выполнения демпфирование s0 осциллятора 190 по отношению к отклонению в направлении возбуждения намного меньше, чем резонансная круговая частота ω0 осциллятора 190, и отношение коэффициента KI интегрирования к коэффициенту KP усиления в с-1 примерно соответствует демпфированию s0. Кроме того, коэффициент KP усиления может выбираться таким образом, что получающаяся ширина полосы пропускания для соответствующего требования стабильности является максимально большой. При этом коэффициент KI интегрирования выбирают в зависимости от демпфирования s0 и коэффициента KP усиления согласно уравнению (50с).
Согласно одному варианту выполнения система, образованная из модуля 180 исполнительных органов, осциллятора 190 и модуля 170 чувствительных элементов, имеет время TS запаздывания объекта регулирования, а главный модуль 200 регулятора имеет действующее последовательно с пропорционально-интегральным регулятором 225 звено с запаздыванием, имеющее время TR запаздывания регулятора. Время TR запаздывания регулятора выбирают в зависимости от резонансной круговой частоты ω0 осциллятора 190 и времени TS запаздывания объекта регулирования таким образом, что фазово-частотная характеристика скорректированного открытого контура при частоте ω0 имеет скачок фазы от +90° до -90° по направлению к более высоким частотам.
Согласно первому варианту этой формы выполнения пропорционально-интегральный регулятор для гармонических задающих величин не изменяет знак, и время TR запаздывания регулятора выбирают таким образом, что произведение резонансной круговой частоты ω0 и суммы времени TS запаздывания объекта регулирования и времени TR запаздывания регулятора дает в результате  . Согласно другому варианту этой формы выполнения пропорционально-интегральный регулятор 225 изменяет знак, или же, смещает фазу на 180°, и вызванную временем TR запаздывания регулятора и временем TS запаздывания объекта регулирования фазу при резонансной круговой частоте ω0 лишь дополняют до
. Согласно другому варианту этой формы выполнения пропорционально-интегральный регулятор 225 изменяет знак, или же, смещает фазу на 180°, и вызванную временем TR запаздывания регулятора и временем TS запаздывания объекта регулирования фазу при резонансной круговой частоте ω0 лишь дополняют до  , так что произведение резонансной круговой частоты ω0 и суммы времени TS запаздывания объекта регулирования и времени TR запаздывания регулятора дает в результате .
, так что произведение резонансной круговой частоты ω0 и суммы времени TS запаздывания объекта регулирования и времени TR запаздывания регулятора дает в результате .
Так как в главном модуле 200 регулятора не предусмотрена трансформация первичной полосы частот, которая для демпфирования более высокочастотных результатов модуляции требует фильтра нижних частот, главный модуль 200 регулятора может быть выполнен значительно более широкополосным. Главный модуль 200 регулятора быстрее реагирует на возмущающие величины, чем сравнимый регулятор, в котором предусмотрена трансформация первичной полосы частот.
Фиг. 4А и 4В относятся к варианту выполнения, в котором главный модуль 200 регулятора содержит дискретный пропорционально-интегральный регулятор 325 для гармонических сигналов номинального значения, имеющий дискретное пропорциональное передаточное звено 324 с коэффициентом KP усиления и дискретное интегрирующее передаточное звено 322 с коэффициентом KI интегрирования. Согласно одному варианту выполнения выдаваемый модулем 170 чувствительных элементов аналоговый сигнал измерения считывается модулем 321 считывания с периодом Т дискретизации, и преобразуется в цифровой входной сигнал для дискретного пропорционально-интегрального регулятора 325. Согласно другому варианту выполнения модуль 170 чувствительных элементов уже выдает цифровой сигнал измерения.
Согласно одному варианту выполнения, в котором система, включающая в себя модуль 180 исполнительных органов, осциллятор 190 и модуль 170 чувствительных элементов, имеет время TS запаздывания объекта регулирования, главный модуль 200 регулятора включает в себя расположенное последовательно с дискретным пропорционально-интегральным регулятором 325 звено 326 с запаздыванием, имеющее время TR запаздывания регулятора. Ниже как время TS запаздывания объекта регулирования, так и время TR запаздывания регулятора выражаются в виде кратного периода Т дискретизации согласно уравнениям (54а) и (54b):

При этом время TR запаздывания регулятора определяют таким образом, что скорректированный открытый контур при резонансной круговой частоте ω0 имеет скачок фазы от +90° до -90° по направлению к более высоким частотам.
Согласно одному варианту выполнения отношение коэффициента KI интегрирования к коэффициенту KP усиления установлено таким, что в s-плоскости нулевые точки передаточной функции регулятора компенсируют комплексно сопряженный полюс передаточной функции объекта регулирования. Согласно другому варианту выполнения параметры регулятора выбраны таким образом, что передаточная функция замкнутого контура эквивалентной системы в первичной полосе частот имеет двойное вещественное собственное значение. Главный модуль 200 регулятора реализован, например, в виде цифровой интегральной схемы, например, в виде ASIC (проблемно ориентированной интегральной схемы), DSP (цифрового сигнального процессора) или FPGA (программируемой логической матрицы), или в виде программы для компьютера или микропроцессора.
Фиг. 4В иллюстрирует z-передаточную функцию GR0(z) дискретного пропорционально-интегрального регулятора 325 для гармонических задающих величин согласно фиг. 4А. Передаточная функция GR0(z) определена таким образом, что пропорционально-интегральный регулятор 325 из входного сигнала xd(k), включающего в себя гармоническое колебание, модулированное скачкообразной функцией σ(k), вырабатывает в качестве выходного сигнала u(k) регулятора гармоническое колебание такой же частоты с пропорциональной времени амплитудой, как это выражено уравнением (55):

Входная функция Xd(z) и выходная функция U(z) получаются посредством z-преобразования согласно уравнениям (56а) и (56b):
При этом передаточная функция GR0(z) дискретного пропорционально-интегрального регулятора 325 для гармонических задающих величин получается согласно уравнению (56с):

Такой дискретный пропорционально-интегральный регулятор вследствие обобщенной интегральной части имеет полюс при  и при гармоническом колебании с частотой ω0 на входе не образует смещение фазы на выходе. Чтобы тем не менее иметь возможность установления произвольной фазы, согласно одному варианту выполнения предусмотрен главный модуль 200 регулятора, содержащий звено 326 с запаздыванием, имеющее запаздывание βD. Передаточная функция GR(z) главного модуля 200 регулятора, содержащего звено 326 с запаздыванием и дискретный пропорционально-интегральный регулятор 325, получается при этом согласно уравнению (57):
и при гармоническом колебании с частотой ω0 на входе не образует смещение фазы на выходе. Чтобы тем не менее иметь возможность установления произвольной фазы, согласно одному варианту выполнения предусмотрен главный модуль 200 регулятора, содержащий звено 326 с запаздыванием, имеющее запаздывание βD. Передаточная функция GR(z) главного модуля 200 регулятора, содержащего звено 326 с запаздыванием и дискретный пропорционально-интегральный регулятор 325, получается при этом согласно уравнению (57):

Модель непрерывного объекта регулирования согласно уравнению (49) должна быть соответствующим образом подвергнута дискретизации. Для этого вначале в передаточной функции G(s) объекта регулирования согласно уравнению (49) выражают время TS запаздывания объекта регулирования в виде кратного периода Т дискретизации:

В общем случае ступенчатая передаточная функция G(z) для дискретизированной модели непрерывного объекта регулирования может быть вычислена при помощи передаточной функции G(s) согласно уравнению (59):

При помощи следующих сокращений согласно уравнениям (59а)-(59е)
из уравнений (58) и (59) получается ступенчатая передаточная функция G(z) для осциллятора 190 согласно уравнению (60):

Согласно одному варианту выполнения изобретения время TR запаздывания регулятора определяют таким образом, что фазово-частотная характеристика скорректированного открытого контура при резонансной частоте ω0 имеет скачок фазы от +90° до -90° по направлению к более высоким частотам. Z-передаточная функция для скорректированного открытого контура получается аналогично уравнению (51) из произведения передаточной функции G(z) объекта регулирования согласно уравнению (58) и передаточной функции GR(z) регулятора согласно уравнению (57):

Аналогично уравнениям (52а) и (52b) параметр βD регулятора выбирают таким образом, что при резонансной круговой частоте ω0 передаточная функция Gk(z) скорректированного открытого контура имеет скачок фазы от +90° до -90°:

При сопоставлении с уравнением (52а), по сравнению с непрерывным регулятором получается дополнительный компонент в размере  , который отображает вызываемое дискретизацией запаздывание в размере дополнительного половинного такта дискретизации. Как и в случае непрерывного регулятора, если смещение фазы, вызываемое временем βS·T запаздывания объекта регулирования и дискретизацией, при резонансной круговой частоте ω0 меньше 90°, скачок фазы в размере 180° может также образовываться посредством отрицательного знака в регуляторе, так что фазы, вызванные дискретизацией, временем βD·T запаздывания регулятора и временем βS·T запаздывания объекта регулирования, при резонансной круговой частоте ω0 должны лишь дополняться до
, который отображает вызываемое дискретизацией запаздывание в размере дополнительного половинного такта дискретизации. Как и в случае непрерывного регулятора, если смещение фазы, вызываемое временем βS·T запаздывания объекта регулирования и дискретизацией, при резонансной круговой частоте ω0 меньше 90°, скачок фазы в размере 180° может также образовываться посредством отрицательного знака в регуляторе, так что фазы, вызванные дискретизацией, временем βD·T запаздывания регулятора и временем βS·T запаздывания объекта регулирования, при резонансной круговой частоте ω0 должны лишь дополняться до  . Соответственно в этом случае для βD получается условие назначения величины согласно уравнению (62b):
. Соответственно в этом случае для βD получается условие назначения величины согласно уравнению (62b):

Уравнения (62а) и (62b) приводят, как правило, к не целочисленному значению βD. В общем случае параметр βD регулятора имеет целочисленную часть nD и остаток  с a
D>1 согласно уравнению (63):
с a
D>1 согласно уравнению (63):

Согласно одному варианту выполнения целочисленную часть nD аппроксимируют при помощи цепи задержки с длиной, заданной посредством nD, а дробную часть  такта дискретизации - посредством всечастотного фильтра первого порядка согласно уравнению (64):
такта дискретизации - посредством всечастотного фильтра первого порядка согласно уравнению (64):

Согласно одному варианту выполнения параметр a
D всечастотного фильтра выбирают таким образом, что фаза точной передаточной функции  и фаза аппроксимации всечастотным фильтром согласно уравнению (64) при резонансной круговой частоте ω0 максимально точно совпадают. Из этого условия в качестве определяющего уравнения для параметра a
D всечастотного фильтра получается уравнение (65):
и фаза аппроксимации всечастотным фильтром согласно уравнению (64) при резонансной круговой частоте ω0 максимально точно совпадают. Из этого условия в качестве определяющего уравнения для параметра a
D всечастотного фильтра получается уравнение (65):

Согласно одному варианту выполнения a D определяют посредством того, что нулевую точку функции усредняют по интервалам согласно уравнению (66):

Определение nD и a D согласно уравнениям (63) и (66) является независимым от способа определения следующих параметров KP и KI регулятора.
Согласно одному варианту выполнения способа изготовления регулирующего модуля, который включает в себя назначение параметров дискретного пропорционально-интегрального регулятора 325 согласно фиг. 4А, коэффициент KP усиления и коэффициент KI интегрирования дискретного пропорционально-интегрального регулятора 325 выбирают таким образом, что нулевые точки в передаточной функции GR(z) регулятора согласно уравнению (57) компенсируют комплексно сопряженный полюс передаточной функции G(z) объекта регулирования согласно уравнению (60). Сравнение коэффициентов уравнений (57) и (60) при z1 приводит к условию назначения параметров согласно уравнению (67):

Сравнение коэффициентов при z0 приводит к условию назначения параметров согласно уравнению (68):

Согласно одному варианту выполнения демпфирование s0 осциллятора 190 и период T дискретизации выбирают таким образом, что имеет силу s0·T<<1, так что с достаточной точностью действуют приближения согласно (69а) и (69b):

При помощи приближений согласно уравнениям (69а) и (69b) оба независимых условия назначения параметров согласно уравнениям (67) и (68) могут быть приближенно выражены посредством одного единственного условия назначения параметров согласно уравнению (70):

Согласно одному варианту выполнения отношение коэффициента KI интегрирования к коэффициенту KP усиления устанавливают равным или приблизительно равным демпфированию s0 осциллятора. Назначение параметров дискретного пропорционально-интегрального регулятора 325 согласно описанному способу, который предусматривает компенсацию полюса объекта регулирования посредством нулевой точки регулятора, приводит к хорошей характеристике слежения замкнутого контура.
Фиг. 5А и 5В относятся к варианту выполнения, при котором главный модуль 200 регулятора имеет расширение 328 регулятора, расположенное последовательно с пропорционально-интегральным регулятором 325 и звеном 326 с запаздыванием согласно фиг. 4А. Ниже структура расширения 328 регулятора выводится из аналогового расширения регулятора для первичной полосы частот.
В частности, осциллятор 190 наряду с резонансной круговой частотой при ω0 может иметь еще дополнительные резонансы, например механические структурные резонансы выше или ниже резонансной круговой частоты ω0. Расширение 328 регулятора рассчитано таким образом, что оно сильнее демпфирует эти дополнительные резонансы. С этой целью в первичной полосе частот традиционного пропорционально-интегрального регулятора следовало бы добавить звено задержки первого порядка (звено PT1) с дополнительным полюсом при частоте перегиба за пределами желаемой ширины полосы пропускания. Этот дополнительный полюс регулятора осуществляет то, что для высоких частот регулятор уже не действует как пропорциональное звено, а его эквивалентная частота спадает в размере 20 дБ на десяток. Реакция y(k) на ступенчатое воздействие такого расширения в первичной полосе частот получается из скачкообразной функции σ(k) в качестве входного сигнала u(k) согласно уравнению (71):

Z-преобразование U(z) входного сигнала u(k) соответствует z-преобразованию скачкообразного сигнала:

Z-преобразование Y(z) выходного сигнала y(k) получается согласно уравнению (72b):

В соответствии с этим, аналогично уравнению (47), для передаточной функции GRE0(z) такого расширения регулятора в первичной полосе частот получается:

Согласно одному варианту выполнения, по аналогии с расширением регулятора в первичной полосе частот, расширение 328 регулятора в полосе пропускания полосового фильтра выполнено таким образом, что расширение 328 регулятора отвечает на подачу модулированного скачкообразной функцией гармонического колебания с резонансной круговой частотой ω0 гармоническим колебанием с такой же частотой, при этом реакция на ступенчатое воздействие расширения первичной полосы частот задает огибающую, как это представлено на правой стороне фиг. 5В.
На фиг. 5В показано преобразование синусоидально модулированной скачкообразной функции u(k) в выходной сигнал с синусоидальным колебанием, огибающая которого получается из реакции на ступенчатое воздействие согласно передаточной функции GRE0(z) дискретного расширения регулятора в полосе пропускания полосового фильтра. Входной сигнал расширения 328 регулятора в полосе пропускания полосового фильтра с передаточной функцией GRE(z) получается согласно уравнению (74):

Выходным сигналом y(k) регулятора является гармоническое колебание, огибающая которого соответствует реакции на ступенчатое воздействие PT1-расширения регулятора в первичной полосе частот:

Z-преобразования U(z) и Y(z) получаются согласно уравнениям (76а) и (76b):
Передаточная функция GRE(z) расширения 328 регулятора для полосы пропускания полосового фильтра получается согласно уравнению (77):

Расширение 328 регулятора с передаточной функцией GRE(z) действует последовательно с дискретным пропорционально-интегральным регулятором 325 аналогично полосовому фильтру первого порядка с резонансной круговой частотой ω0 в качестве средней частоты. Величина и фаза скорректированного открытого контура при резонансной круговой частоте ω0 в узком диапазоне вокруг резонансной круговой частоты ω0 согласно уравнению (78) остаются неизменными:

В этом диапазоне на эквивалентную частотную характеристику скорректированного открытого контура влияние почти не оказывается, в то время как вне этого диапазона происходит существенное уменьшение величины, так что могут снижаться возможные нежелательные резонансы.
Фиг. 6А-6С относятся к микромеханическому датчику 500 угловой скорости согласно следующему варианту выполнения. Датчик 500 угловой скорости включает в себя подвешенный на первых пружинных элементах 541 модуль 590 возбуждения, например, возбуждающую раму. Первые пружинные элементы 541 присоединяют модуль 590 возбуждения к структуре 551 подвески, которая неподвижно соединена с несущим основанием 550, показанным на фиг. 6В. Пружинные элементы 541 демпфируют отклонение модуля 590 возбуждения по отношению к несущему основанию 550 вдоль направления 501 возбуждения лишь незначительно. Посредством вторых пружинных элементов 542 с модулем 590 возбуждения соединен модуль 580 детектирования, который является подвижным по отношению к модулю 590 возбуждения в основном вдоль направления 502 детектирования, ортогонального направлению 501 возбуждения. Направления 501, 502 возбуждения и детектирования проходят параллельно поверхности несущего основания 550. Первыми и вторыми пружинными элементами 541, 542 являются, например, аналогичные балкам структуры с малым поперечным сечением, которые выполнены между соответственно соединяемыми структурами.
Согласно одному варианту выполнения датчик 500 угловой скорости включает в себя первые модули 561, 571 силовых датчиков и чувствительных элементов, например, электростатические силовые датчики и чувствительные элементы, которые возбуждают колебание системы, образованной из модуля 590 возбуждения и модуля 580 детектирования, вдоль направления 501 возбуждения, и/или обеспечивают возможность регистрации соответствующего отклонения модуля 590 возбуждения. Кроме того, датчик 500 угловой скорости включает в себя вторые модули 562, 572 силовых датчиков и чувствительных элементов, например, электростатические силовые датчики и чувствительные элементы, которые воздействуют на модуль 580 детектирования и/или обеспечивают возможность регистрации его отклонения. Согласно одному варианту выполнения по меньшей мере один из вторых модулей 562, 572 силовых датчиков и чувствительных элементов подвергается управлению таким образом, что он противодействует отклонению модуля 580 детектирования, вызванному возмущающей величиной или, в случае систем с обратной связью, измеряемой величиной.
Например, при работе датчика 500 угловой скорости первые модули 561, 571 силовых датчиков и чувствительных элементов возбуждают колебания модуля 590 возбуждения вдоль направления 501 возбуждения, при этом модуль 580 детектирования движется совместно с модулем 590 возбуждения приблизительно с такими же амплитудой и фазой. Если конструкция поворачивается вокруг оси, ортогональной плоскости основания, то на модуль 590 возбуждения и модуль 580 детектирования действует кориолисова сила, которая отклоняет модуль 580 детектирования по отношению к модулю 590 возбуждения в направлении 502 детектирования. Вторые модули 562, 572 силовых датчиков и чувствительных элементов регистрируют отклонение модуля 580 детектирования и, таким образом, вращательное движение вокруг оси, ортогональной плоскости основания.
Согласно одному варианту выполнения по меньшей мере один из модулей 561, 571, 562, 572 силовых датчиков и чувствительных элементов действует в качестве исполнительного органа, и либо модуль 590 возбуждения, либо модуль 580 детектирования действуют в качестве осциллятора в смысле одного из описанных выше устройств 200.
Согласно представленному на фиг. 6С варианту выполнения датчика 500 угловой скорости, например, первые модули 561, 571 силовых датчиков и чувствительных элементов возбуждают колебание модуля 590 возбуждения с резонансной круговой частотой ω0 вдоль направления 501 возбуждения. При этом в контуре регулирования, содержащем главный модуль 200 регулятора и модуль 600 расширения регулятора описанного выше типа, колебание модуля 580 детектирования вдоль направления 502 детектирования (х2-осциллятор) может, например, соответствовать гармоническому силовому сигналу, как это описано выше.
Отклонение х2-осциллятора может регистрироваться посредством заряда на общем подвижном электроде, который выполнен на модуле 590 возбуждения. Заряд может отводиться через одну из структур 551 подвески. Модуль 521 усиления заряда усиливает отведенный сигнал. В то время как обычно модуль демодулятора демодулирует отведенный сигнал с частотой, которая, например, соответствует резонансной круговой частоте ω0, прежде чем он будет подведен к модулю регулятора, в вариантах выполнения изобретения предусмотрено подводить к модулю 520 регулятора описанного выше типа не модулированный гармонический сигнал, в качестве сигнала измерения в приведенном выше смысле.
Действующее на колебание демпфирование s0 значительно меньше, чем резонансная круговая частота ω0. Отведенный через раму возбуждения или же через модуль 590 возбуждения сигнал частично отображает перемещение модуля 590 возбуждения вдоль направления 501 возбуждения. Возмущающая величина, источник которой может находиться вне датчика 500 угловой скорости, или же, в системе с обратной связью, измеряемая величина, накладывается на колебание и модулирует его амплитуду. Модуль 520 регулятора выводит из модулированного гармонического сигнала управляющий сигнал для вторых модулей 562, 572 силовых датчиков и чувствительных элементов, что осуществляет их противодействие отклонению, вызванному возмущающей величиной или же измеряемой величиной. Модуль 522 усилителя преобразует управляющий сигнал в соответствующий сигнал возврата для электродов вторых модулей 562, 572 силовых датчиков и чувствительных элементов. Модуль 520 регулятора соответственно включает в себя один из описанных выше главных модулей 200 регулятора и модулей 600 расширения регулятора.
Представленный на фиг. 7 датчик 505 угловой скорости отличается от датчика 500 угловой скорости, представленного на фиг. 6А, наличием кориолисова модуля 585, расположенного между модулем 590 возбуждения и модулем 580 детектирования. Вторые пружинные элементы 542, которые присоединяют кориолисов модуль 585 к модулю 590 возбуждения, допускают отклонение кориолисова модуля 585 по отношению к модулю 590 возбуждения в направлении 502 детектирования. Третьи пружинные элементы 543, которые частично могут быть соединены с несущим основанием 550, присоединяют модуль 580 детектирования к кориолисову модулю 585 таким образом, что модуль 580 детектирования может следовать за перемещением кориолисова модуля 585 вдоль направления 502 детектирования, но не вдоль направления 501 возбуждения. Модуль 580 детектирования зафиксирован по отношению к направлению 501 возбуждения и является подвижным в направлении 502 детектирования.
Согласно другим вариантам выполнения по меньшей мере один из первых или вторых модулей 561, 562, 571, 572 силовых датчиков и чувствительных элементов действует в качестве исполнительного органа, и либо модуль 590 возбуждения, либо модуль 580 детектирования, либо как модуль 590 возбуждения, так и модуль 580 детектирования действуют в качестве осциллятора в смысле одного из описанных выше устройств, которые работают согласно описанному принципу регулятора с полосовым фильтром. При этом модули 561 и 571 силовых датчиков и чувствительных элементов действуют в качестве модулей силовых датчиков или же чувствительных элементов для x1-осциллятора, а модули 562 и 572 силовых датчиков и чувствительных элементов действуют в качестве модулей силовых датчиков или же чувствительных элементов для х2-осциллятора.
Датчик угловой скорости согласно другому варианту выполнения включает в себя два представленных на фиг. 6А или на фиг. 7 устройства, которые соединены друг с другом таким образом, что модули возбуждения в стационарном состоянии совершают противоположные друг другу колебания. Другие варианты выполнения относятся к датчикам угловой скорости, содержащим четыре представленных на фиг. 6А или на фиг. 7 устройства, которые соединены друг с другом, и соответственно два из модулей возбуждения в стационарном состоянии совершают противоположные друг другу колебания.
Следующий вариант выполнения относится к конструкции датчика угловой скорости, содержащей представленную на фиг. 1, 2А и 2В комбинацию, состоящую из главного модуля 200 регулятора и модуля 600 расширения регулятора. Главный модуль 200 регулятора включает в себя по меньшей мере один пропорционально-интегральный регулятор 225, 325 для гармонических сигналов номинального значения, который, в свою очередь, содержит пропорциональное передаточное звено 224, 324 и расположенное параллельно пропорциональному передаточному звену 224, 324 интегрирующее передаточное звено 222, 322, при этом вход главного модуля 200 регулятора соединен с обоими передаточными звеньями 222, 224, 322, 324. Передаточная функция пропорционально-интегрального регулятора 225, 325 для гармонических сигналов номинального значения имеет комплексно сопряженный полюс при круговой частоте ωr регулятора в s-плоскости или при  в z-плоскости, при этом T является периодом дискретизации дискретного входного сигнала пропорционально-интегрального регулятора 325, а ωr>0.
в z-плоскости, при этом T является периодом дискретизации дискретного входного сигнала пропорционально-интегрального регулятора 325, а ωr>0.
Для этого коэффициент интегрирования интегрирующего передаточного звена 222, 322 и коэффициент усиления пропорционального передаточного звена 224, 324 выбраны таким образом, что пропорционально-интегральный регулятор 225, 325 для гармонических задающих величин при подаче на вход регулятора гармонического входного сигнала с круговой частотой ωr регулятора, модулированного скачкообразной функцией, предназначен для вырабатывания гармонического колебания с круговой частотой ωr регулятора и с возрастающей амплитудой на выходе регулятора.
Пропорционально-интегральный регулятор 225, 325 для гармонических сигналов номинального значения может пониматься как регулятор, выведенный из традиционного пропорционально-интегрального регулятора для стационарных сигналов номинального значения, и отличается от него расположением полюсов в s-плоскости или же в z-плоскости.
Фиг. 8 относится к способу эксплуатации регулирующего устройства с гармонической задающей величиной. Модуль чувствительных элементов вырабатывает сигнал измерения, который отображает отклонение осциллятора вдоль направления возбуждения (802). Модуль расширения регулятора на основании оценки фактической фазы и фактической амплитуды остаточного колебания осциллятора при деактивированном модуле исполнительных органов вырабатывает синхронизированный по фазе и равный по амплитуде гармонический сигнал номинального значения (804). Главный модуль регулятора вырабатывает из сигнала измерения и синхронного сигнала номинального значения синхронизированный управляющий сигнал для модуля исполнительных органов, так что модуль исполнительных органов может противодействовать отклонению осциллятора от гармонического колебания. Одновременно с выработкой синхронизированного управляющего сигнала или после нее активируется модуль исполнительных органов (806).


Кориолисов гироскоп, содержащий корректировочные модули, и способ уменьшения квадратурного искажения
Регулирующий модуль и устройство для возврата в исходное состояние осциллятора, возбуждаемого гармоническим колебанием, а также датчик мгновенной угловой скорости
Высокочистый гранулированный диоксид кремния для применения в областях использования кварцевого стекла и способ получения такого гранулированного диоксида кремния
Датчик ускорения, а также способ изготовления датчика ускорения
Способ и устройство для передачи данных при несинхронизированных переходах между областями с разными тактовыми частотами
Система и способ определения перемещений и колебаний подвижных структур
Способ изготовления конструктивного элемента и сам конструктивный элемент
Способ оптимизации времени включения кориолисова гироскопа и кориолисов гироскоп, подходящий для этого
Способ и устройство для определения навигационных данных
Способ изготовления компонента
Кориолисов гироскоп, содержащий корректировочные модули, и способ уменьшения квадратурного искажения
Регулирующий модуль и устройство для возврата в исходное состояние осциллятора, возбуждаемого гармоническим колебанием, а также датчик мгновенной угловой скорости
Высокочистый гранулированный диоксид кремния для применения в областях использования кварцевого стекла и способ получения такого гранулированного диоксида кремния
Датчик ускорения, а также способ изготовления датчика ускорения
Способ и устройство для передачи данных при несинхронизированных переходах между областями с разными тактовыми частотами
Система и способ определения перемещений и колебаний подвижных структур
Способ изготовления конструктивного элемента и сам конструктивный элемент
Способ оптимизации времени включения кориолисова гироскопа и кориолисов гироскоп, подходящий для этого
Способ и устройство для определения навигационных данных
Осажденная кремниевая кислота, способ ее получения

