Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ УСТРОЙСТВ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ ЕГО КОРПУСА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к области гироскопических систем и способов для определения угловой ориентации устройств корабля, имеющего центральный комплекс навигации и ориентации. Ориентация устройств определяется с учетом статических и динамических угловых деформаций корпуса корабля и погрешностей установки устройств на корабле.
УРОВЕНЬ ТЕХНИКИ
Эффективность использования различных устройств корабля (УК), например, антенны радиолокатора или оптического визира, зависит от точности определения их угловой ориентации в пространстве. Определение ориентации упомянутых устройств с использованием информации центрального комплекса навигации и ориентации (НК) корабля затруднено вследствие деформаций корпуса корабля. Дополнительные погрешности в ориентации возникают также при ошибках установки УК на корабль. Диапазон динамических угловых деформаций корабля при наличии качки в зависимости от его класса может колебаться от единиц угловых минут до одного градуса. Ошибки установки УК относительно системы координат НК, подлежащие определению, могут достигать нескольких градусов. Необходимо, чтобы ошибки определения угловой ориентации УК, как правило, не превышали одной угловой минуты. Динамические, квазистатические и статические рассогласования систем координат УК относительно НК могут определяться разными способами. Указанные рассогласования вокруг горизонтальных осей определяются с использованием гравитационных сил. Значительно сложнее определить рассогласования систем координат вокруг вертикальной оси.
Необходимость определения, уточнения и запоминания статических и квазистатических рассогласований УК возникает в процессе эксплуатации корабля.
Деформации корпуса корабля происходят при его качках и маневрировании, при суточных и сезонных изменениях окружающей температуры, при его перезагрузках, старения материала корпуса, а также заменах УК и элементов НК при ремонте.
Применение оптических систем ограничивается сложностью их установки на кораблях. Наиболее близким аналогом предлагаемого изобретения является «Способ определения деформаций и углов ориентации корабля с учетом деформаций» (Патент РФ №2261417). Согласно описанию этого патента, совместно обрабатывается информация триады датчиков угловой скорости (ДУС) 1 и блока акселерометров 7, расположенных в месте потребителя информации УК, с информацией гироазимутгоризонта (ГАГ) 10, расположенного вблизи центра тяжести корабля. Статические и динамические рассогласования УК относительно ГАГ по бортовой и килевой качкам определяют путем измерения разностей углов качек, определяемых ГАГ, и интегралов угловых скоростей, определяемых ДУС, при замыканиях контуров комплексирования. Динамические рассогласования упомянутых УК и ГАГ вокруг вертикальной оси определяют аналогичным образом. Для вычисления значения статического рассогласования УК и ГАГ вокруг вертикальной оси, т.е. поправки курса ΔΚ, используется достаточно сложная процедура обработки информации акселерометров, заимствованная из теории инерциальной навигации, заканчивающаяся применением фильтра Калмана.
К недостаткам рассматриваемого способа относится использование гироазимутгоризонта (ГАГ) в качестве основного измерителя углов качек θк и ψ, курса К, а также составляющих скорости движения VN и VE корабля и географической широте φ. Изделие такого типа определяет только углы качки корабля и хранит азимутальное направление. Необходимые для решения задачи параметры определяются навигационным комплексом корабля.
В рассматриваемом способе при использовании информации от ДУС для определения значений бортовой и килевой качек не учитывается, что система координат ДУС развернута по азимуту относительно ГАГ на некоторый угол ΔΚ. В результате определяются значения углов наклона относительно горизонта, которые не совпадают с углами бортовой и килевой качек. Для исключения таких погрешностей необходимо, например, значения угловых скоростей наклонов на выходе ДУС привести в систему координат, развернутую на угол ΔΚ.
К недостаткам рассматриваемого способа относится использование для вычисления значения статического рассогласования УК и ГАГ вокруг вертикальной оси достаточно сложной процедуры обработки информации акселерометров, заимствованная из теории инерциальной навигации, заканчивающаяся применением фильтра Калмана.
Кроме того, как следует из описания патента, устойчивость такого фильтра зависит от уровня ошибок ДУС и не всегда обеспечивается. В рассматриваемом способе не предусмотрено запоминающее устройство для хранения значения статической и квазистатической деформации корпуса корабля вокруг вертикальной оси на интервалах времени, когда она не может быть определена вследствие отсутствия качки корабля.
На практике чаще вместо ДУС и блока акселерометров используется блок ориентации (БО), в общем корпусе которого установлены ДУС и акселерометры. Это позволяет производить калибровку БО для определения ошибок ориентации измерительных осей его элементов относительно посадочных поверхностей корпуса блока. Результаты калибровки паспортизируются и учитываются в процессе решения задач ориентации. В состав таких блоков вводят также вычислительные устройства, наделяющие блоки свойствами гировертикали, гироазимутгоризонта или инерциальной системы. Использование блоков ориентации с целью определения угловых деформаций корабля существенно упрощает решение задачи по сравнению с рассмотренным способом.
Таким образом, в области техники существует необходимость в обеспечении более точных, простых и надежных способа и системы для определения угловых деформаций корпуса корабля. Кроме того, существует потребность в создании способа и системы для уточнения начальных угловых рассогласований УК между собой и относительно навигационного комплекса корабля при установках УК на корабль и их заменах в процессе эксплуатации корабля.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном аспекте предлагаемое изобретение относится к системе для определения ориентации устройств корабля с учетом деформаций его корпуса. Предлагаемая система содержит интеграторы; сумматоры; инверторы; и, кроме того, содержит навигационный комплекс корабля, блок ориентации, установленный на устройстве корабля, преобразователь координат, связывающий системы координат навигационного комплекса и блока ориентации, преобразователь координат, осуществляющий преобразование координат угловых скоростей наклона палубы в угловые скорости бортовой и килевой качек, преобразователь координат, осуществляющий преобразование координат углов наклона палубы в углы бортовой и килевой качек, множительные устройства, фильтры нижних частот и запоминающие устройства; причем выход навигационного комплекса с информацией о курсе, составляющих линейной скорости и географической широте соединен с входом блока ориентации, выход блока ориентации соединен с входом преобразователя координат, связывающего системы координат блока ориентации и навигационного комплекса, выходы преобразователя, связывающего системы координат блока ориентации и навигационного комплекса, содержащие информацию об угловых скоростях наклонов палубы, соединены с входом преобразователя координат, осуществляющего преобразование координат угловых скоростей наклона палубы в угловые скорости качек, выходы преобразователя, связывающего системы координат блока ориентации и навигационного комплекса, содержащие информацию об угловых скоростях наклонов палубы, соединены с входами преобразователя координат углов наклона в углы бортовой и килевой качек, выход преобразователя координат, осуществляющего преобразование координат угловых скоростей наклона палубы в угловые скорости бортовой и килевой качек, содержащий информацию об угловой скорости бортовой качки, соединен с входом соответствующего сумматора, сумматор выполнен с возможностью суммировать поступающие на его входы сигналы, выход сумматора соединен с входом соответствующего интегратора, а другой вход сумматора соединен с выходом соответствующего фильтра нижних частот, интегратор выполнен с возможностью интегрировать сигналы с выхода сумматора и вырабатывать выходной сигнал, содержащий информацию об углах бортовой качки, с учетом динамических изгибов корпуса корабля, причем коэффициент преобразования интегратора устанавливается равным обратной величине коэффициента преобразования измерителя угловой скорости бортовой качки блока ориентации, выход интегратора соединен с входом сумматора, другой вход сумматора соединен с запоминающим устройством, в котором хранится значение постоянной составляющей рассогласования по бортовой качке систем координат модуля ориентации и навигационного комплекса, выход интегратора соединен также с соответствующим инвертором, инвертер выполнен с возможностью инвертировать входной сигнал, выход инвертора соединен с входом сумматора, другой вход которого соединен с выходом навигационного комплекса, содержащим информацию о бортовой качке, выход сумматора соединен с входом соответствующего фильтра нижних частот, фильтр нижних частот выполнен таким образом, чтобы частота среза его частотной характеристики была существенно меньше, например, в 100 раз, частоты качки корабля, а произведение коэффициента преобразования в полосе прозрачности фильтра на коэффициент преобразования интегратора также было существенно меньше частоты качки, выход фильтра соединен с входом сумматора, соединенного с входом интегратора, выход преобразователя координат, осуществляющего преобразование угловых скоростей наклона палубы в угловые скорости бортовой и килевой качек, содержащий информацию об угловой скорости килевой качки, соединен с входом соответствующего сумматора, сумматор выполнен с возможностью суммировать поступающие на его входы сигналы, выход сумматора соединен с входом соответствующего интегратора, а другой вход сумматора соединен с выходом соответствующего фильтра нижних частот, интегратор выполнен с возможностью интегрировать сигналы с выхода сумматора и вырабатывать выходной сигнал, содержащий информацию об углах килевой качки с учетом динамических изгибов корпуса корабля, причем коэффициент преобразования интегратора устанавливается равным обратной величине коэффициента преобразования измерителя угловой скорости килевой качки блока ориентации, выход интегратора соединен с входом сумматора, другой вход которого соединен с запоминающим устройством, в котором хранится значение постоянной составляющей рассогласования по килевой качке систем координат модуля ориентации и навигационного комплекса, выход интегратора соединен также с соответствующим инвертором, инвертер выполнен с возможностью инвертировать входной сигнал, выход инвертора соединен с входом сумматора, другой вход которого соединен с выходом навигационного комплекса, содержащим информацию о килевой качке, выход сумматора соединен с входом соответствующего фильтра нижних частот, фильтр нижних частот выполнен таким образом, чтобы частота среза его частотной характеристики была существенно меньше, например, в 100 раз, частоты качки корабля, а произведение коэффициента преобразования в полосе прозрачности фильтра на коэффициент преобразования интегратора также было существенно меньше частоты качки, выход фильтра соединен с входом сумматора, соединенного с входом интегратора, выход интегратора соединен с сумматором, на выходе которого вырабатывается текущее значение угла килевой качки, а также соединен с входом инвертора, выход инвертора связан с входом сумматора, выход сумматора соединен с фильтром нижних частот, а другой вход сумматора соединен с выходом навигационного комплекса, на котором имеется информация о килевой качке, выход преобразователя координат, связывающего системы координат навигационного комплекса и блока ориентации, содержащий информацию о курсе блока ориентации соединен с входом соответствующего сумматора, сумматор выполнен с возможностью суммировать поступающие на его входы сигналы, выход сумматора соединен с входом соответствующего интегратора, а другой вход сумматора соединен с выходом соответствующего фильтра нижних частот, интегратор выполнен с возможностью интегрировать сигналы выхода сумматора и вырабатывать выходной сигнал, содержащий информацию о курсе корабля в месте расположения блока ориентации, с учетом динамических изгибов корпуса корабля, причем коэффициент преобразования интегратора устанавливается равным обратной величине коэффициента преобразования измерителя азимутальной угловой скорости блока ориентации, выход интегратора соединен с входом сумматора, другой вход которого соединен с запоминающим устройством, в котором хранится значение постоянной составляющей рассогласования по курсу систем координат модуля ориентации и навигационного комплекса, выход интегратора соединен также с соответствующим инвертором, инвертер выполнен с возможностью инвертировать входной сигнал, выход инвертора соединен с входом сумматора, другой вход сумматора соединен с выходом навигационного комплекса, содержащим информацию о курсе корабля, выход сумматора соединен с входом соответствующего фильтра нижних частот, фильтр нижних частот выполнен таким образом, чтобы частота среза его частотной характеристики была существенно меньше, например, в 100 раз, частоты качки и рыскания корабля, причем коэффициент преобразования в полосе прозрачности фильтра выбран таким образом, чтобы его произведение на коэффициент преобразования интегратора также было существенно меньше частоты качки и рыскания, выход фильтра соединен с входом сумматора, соединенного с входом интегратора, выход интегратора соединен с входом сумматора, на выходе которого вырабатывается текущее значение курса корабля, а также с входом инвертора, выход которого соединен с сумматором, выход которого соединен с фильтром нижних частот, а другой вход сумматора соединен с выходом навигационного комплекса, на котором имеется информация о курсе корабля, выход навигационного комплекса, содержащий информацию о бортовой качке, соединен также с сумматором, второй вход которого соединен с выходом запоминающего устройства, в котором хранится значение постоянной составляющей рассогласования по бортовой качке систем координат модуля ориентации и навигационного комплекса, выход сумматора соединен с входом инвертора, выход инвертора соединен с сумматором, выход сумматора соединен с входом соответствующего множительного устройства и входом фильтра нижних частот, выход фильтра соединен с входом запоминающего устройства, другой вход сумматора соединен с выходом преобразователя координат, аналитически поворачивающего по курсу систему координат, в которой вырабатывается в блоке ориентации угол наклона, близкий к углу бортовой качки, и соединен с входом множительного устройства, участвующего в обработке информации о килевой качке, выход навигационного комплекса, содержащий информацию о килевой качке, соединен также с сумматором, второй вход которого соединен с выходом запоминающего устройства, в котором хранится значение постоянной составляющей рассогласования по килевой качке систем координат модуля ориентации и навигационного комплекса, выход сумматора соединен с входом инвертора, выход инвертора соединен с сумматором, выход сумматора соединен с входом соответствующего множительного устройства и входом фильтра нижних частот, выход фильтра соединен с входом запоминающего устройства, другой вход сумматора соединен с выходом преобразователя координат, аналитически поворачивающего по курсу систему координат, в которой вырабатывается в блоке ориентации угол наклона, близкий к углу килевой качки, и соединен с входом множительного устройства, участвующего в обработке информации о бортовой качке, выход множительного устройства, один из входов которого соединен с фильтром нижних частот для обработки информации о килевой качке, соединен с входом инвертора, выход инвертора соединен с сумматором, другой вход которого соединен с другим множительным устройством, выход сумматора соединен с входом фильтра нижних частот, выход которого соединен с входом интегратора, выход интегратор соединен с входом запоминающего устройства величины поправки курса, выход запоминающего устройства поправки курса соединен с преобразователем координат угловых скоростей наклона палубы в угловые скорости бортовой и килевой качеки с преобразователем координат, аналитически поворачивающего по курсу систему координат, в которой вырабатываются в блоке ориентации углы наклонов, а также соединен с входом инвертора, выход которого соединен с входом сумматора, на выходе которого вырабатывается значение курса корабля в месте установки блока ориентации,
Согласно другому аспекту предлагаемого изобретения, оно относится также к способу определения ориентации системы корабля с учетом деформаций его корпуса, согласно которому текущие параметры угловой ориентации устройства корабля вычисляются путем совместной обработки информации, приведенной в одну систему координат, блока ориентации, соединенного с устройством корабля, и навигационного комплекса корабля, причем текущие значения углов качек и курса, без учета значений статических угловых рассогласований блока ориентации относительно навигационного комплекса корабля, определяются в каждом канале вычисления значений данной величины путем интегрирования суммы угловой скорости данной величины, определенной модулем ориентации, и отфильтрованной разности величин, определенных навигационным комплексом и ее значения, вычисленного в процессе интегрирования, а статические угловые рассогласования системы координат блока ориентации относительно навигационного комплекса по углам бортовой и килевой качкам вычисляются путем определенных модулем ориентации и навигационным комплексом, причем статическое угловое рассогласование по курсу блока ориентации относительно навигационного комплекса вычисляется и запоминается путем сведения к минимуму, соответствующим преобразованием координат, суммы разностей значений углов бортовой качки, определенных модулем ориентации и навигационным комплексом, умноженных на значения углов килевой качки, и разностей значений углов килевой качки, определенных модулем ориентации и навигационным комплексом, умноженных на значения углов бортовой качки.
Техническим результатом предлагаемого изобретения является повышение точности определения ориентации устройства корабля с учетом динамических и статических деформаций его корпуса а также упрощение используемых математических процедур.
Сущность и преимущества предлагаемого изобретения будут далее более подробно объяснены со ссылками на прилагаемую структурную схему.
Необходимо отметить, что, так как изобретение имеет единый замысел, то все пояснения в работе системы могут быть также перенесены на функционирование предлагаемого способа.
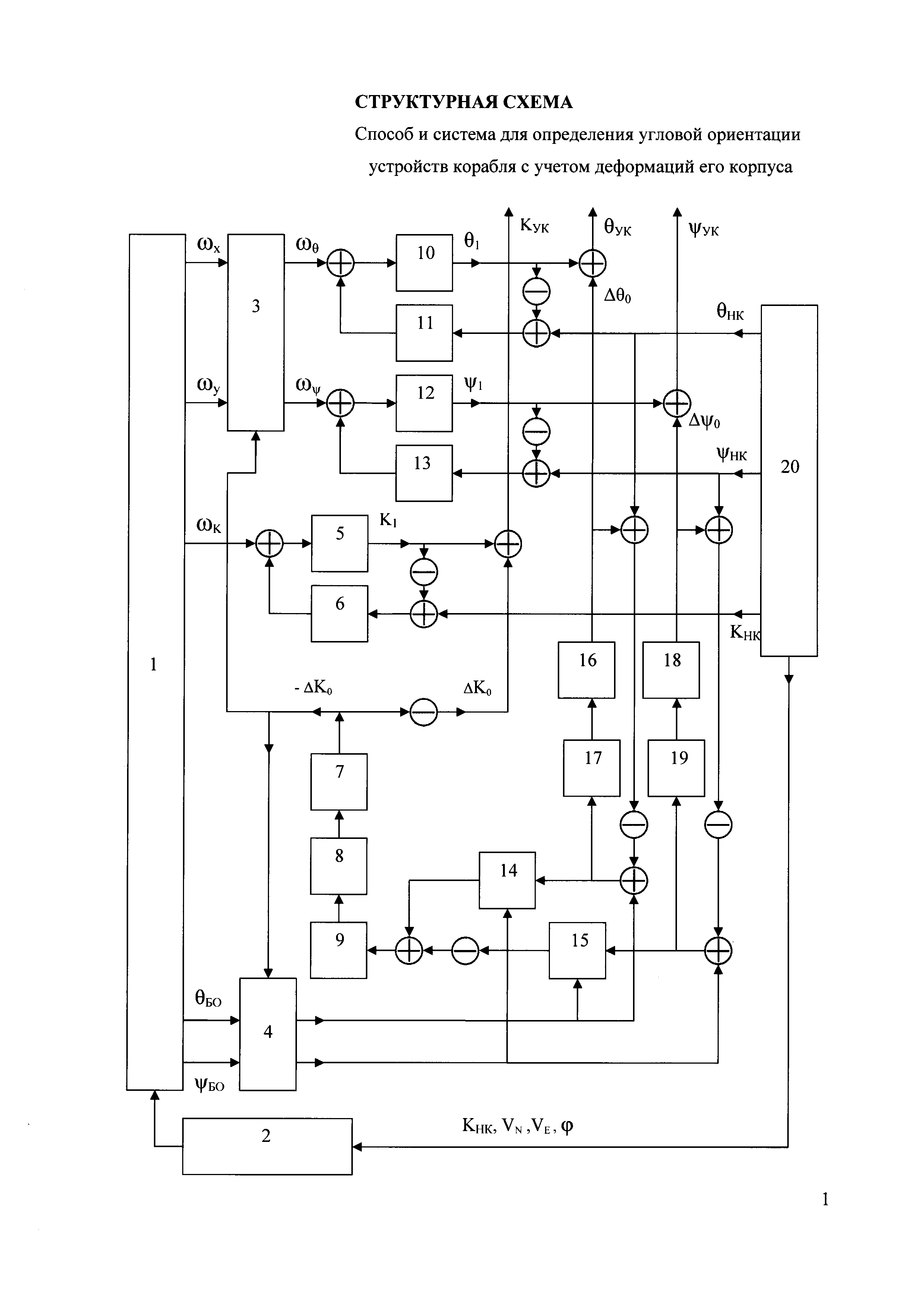
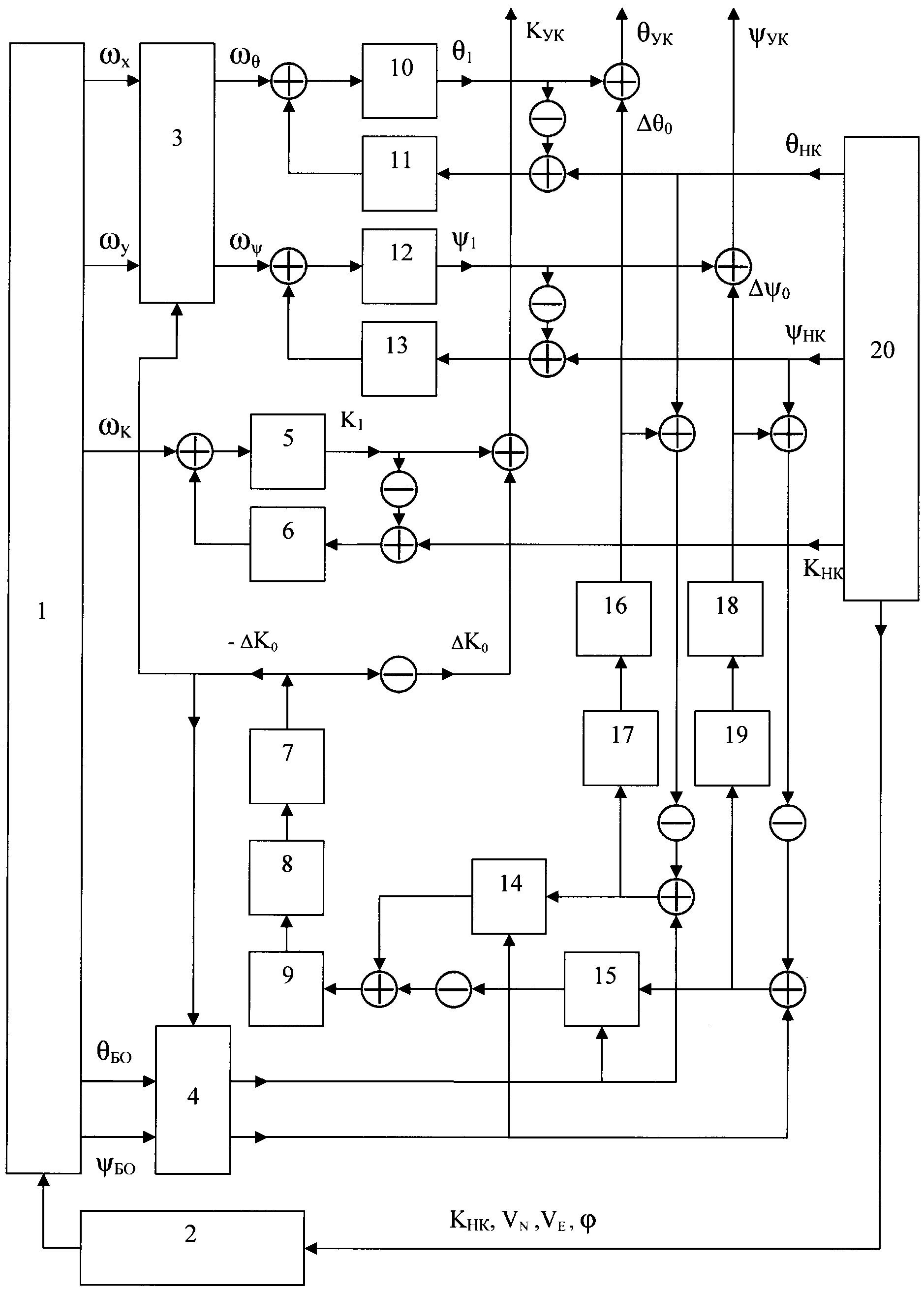
КРАТКОЕ ОПИСАНИЕ СТРУКТУРНОЙ СХЕМЫ
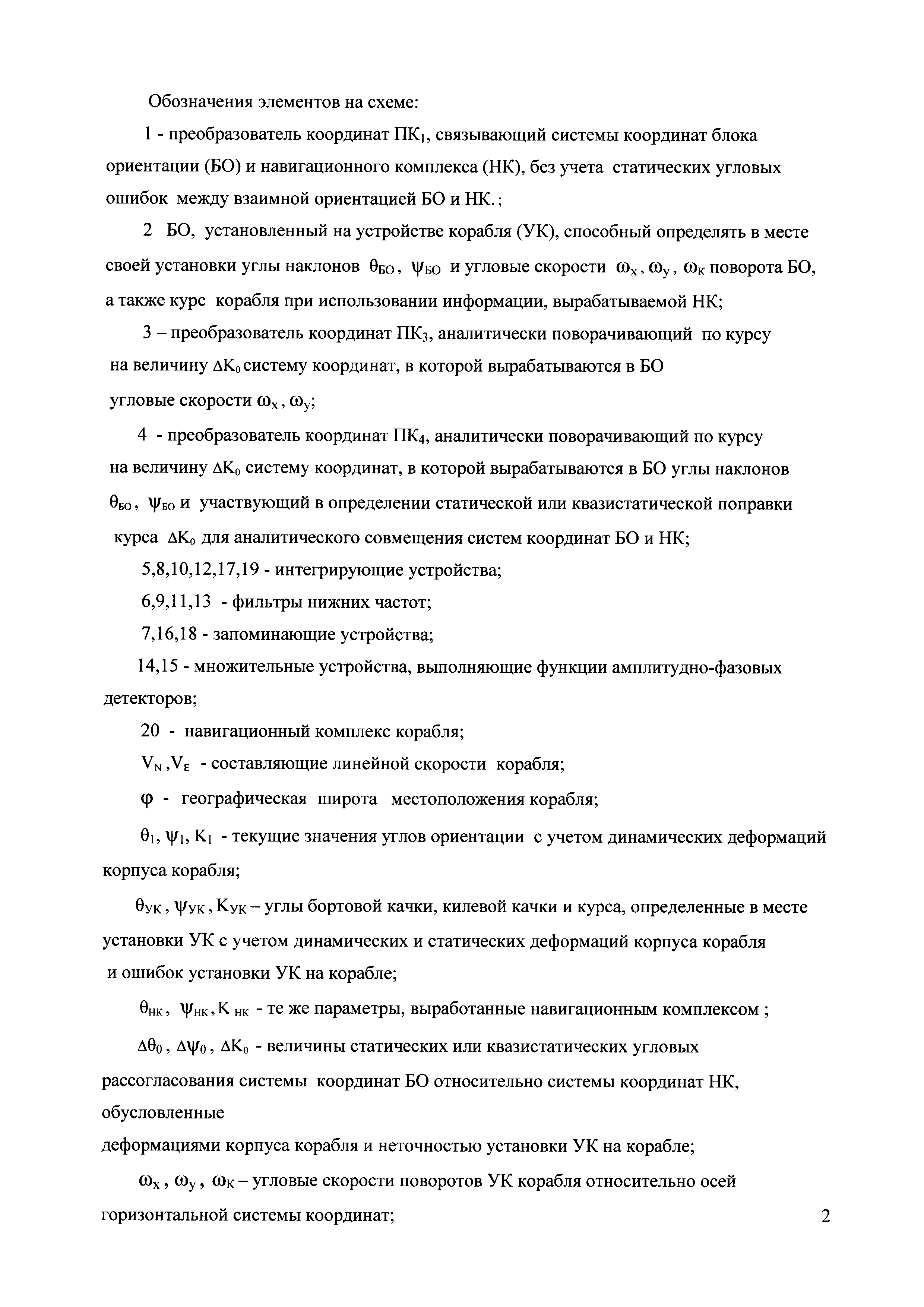
Структурная схема содержит блок ориентации (БО), соединенный с устройством корабля, навигационный комплекс корабля (НК), преобразователи координат, интегрирующие устройства, фильтры нижних частот, множительные и запоминающие устройства, а также сумматоры и инверторы.
В предлагаемой системе определяются значения следующих величин:
θУК=θΗΚ+Δθ~+Δθ0, ψУК=ψНК+Δψ~+Δψ0, KУК=KНК+ΔΚ~+ΔΚ0,
здесь: θУК, ψУК, KУК - углы бортовой качки, килевой качки и курса, определенные в месте установки устройства корабля (УК) с учетом динамических и статических деформаций корпуса корабля и ошибок установки УК на корабле;
θНК, ψНК, KНК - те же параметры, выработанные навигационным (НК);
Δθ~, Δψ~, ΔК~ - переменные составляющие углов качек и курса, обусловленные упругими деформациями корпуса корабля между местами установки УК и НК при качке корабля;
Δθ0, Δψ0, ΔΚ0 - величины статических или квазистатических угловых рассогласований системы координат УК относительно системы координат НК, обусловленные деформациями корпуса корабля и неточностью установки УК на корабле.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В предлагаемой системе и способе для определения угловой ориентации систем корабля относительно приборов навигационного комплекса корабля используется блок ориентации. Известно большое количество практически применяемых платформенных и бесплатформенных приборов такого типа. В процедуре обработки информации заявленного изобретения используются широко известные методы автоматического регулирования. Поэтому практическое применение изобретения не вызывает затруднений.
В известном из уровня техники способе в качестве основного средства ориентации корабля применяется гироазимутгоризонт (ГАГ), по определению не способный определять курс корабля. В указанном способе не осуществляется необходимое преобразование координат измеренных угловых скоростей качек, что приводит к дополнительным ошибкам решения поставленной задачи. В способе не предусмотрено запоминание величины статической поправки курса, а также используется довольно сложное построение системы и связанные с этим сложные математические модели.
Предлагаемая система и способ направлены на устранение недостатков имеющегося уровня техники.
Предлагаемая система в соответствие со структурной схемой работает следующим образом.
Текущие значения бортовой качки θ1 корабля в месте установки БО с учетом переменой составляющей θ~ деформаций корпуса корабля определяются следующим образом. В части схемы автоматического регулирования, образованной интегратором 10 и фильтром 11, поступают значения θΗΚ и производной ωθ=k1p(θΗΚ+θ~) от угла θБО, где k1 - передаточная функция измерителя угловой скорости БО. При этом значение ωθ определяется путем обработки информации БО в ПК3. Передаточная функция интегратора имеет вид k10/р, а фильтра - k11/(Тр+1). Промежуточные значения величин в цепях обратной связи - ε1 и ε2. Разность ε1=θНК-θ1 поступает на вход фильтра 11. На вход интегратора поступает значение ε2=k1p(θΗΚ+θ~)+ε1k11./(Tp+1). Для решения задачи устанавливается следующее соотношение коэффициентов k1=1/k10.
При этом уравниваются масштабы величин θБО и θΗΚ.
Рассмотренные величины связаны следующими формулами:
θ1=ε2(k10/р) или ε2=θ1(р/k10); θ1(p/k10)=(θНК+θ~)k1p+(θΗΚ-θ1)k11./(Тр+1);
θ1[р/k10+k11./(Тр+1)]=θНК k1p+θ~k1p+θHK k11./(Тр+1).
Заменим k1 на 1/k10. θ1[р/k10+k11./(Тр+1)]=θНК р/k10+θ~р/k10+θHK k11./(Тр+1);
θ1[р/k10+k11./(Тр+1)]=θΗΚ[р/k10+k11./(Тр+1)]+θ~р/k10;
Таким образом, получим соотношение: θ1=θΗΚ+θ~ [р.(Тр+1)]/[р.(Тр+1)+k10k11].
При условии k10k11=ωc≤0,01, где ωс - частота среза фильтра НЧ, образованного интегратором, охваченного обратной связью, текущие значения углов бортовой качки в месте установки БО определяется с достаточной точностью формулой θ1=θΗΚ+θ~.
Поскольку θ1 определяется интегрированием величины ωθ, то существует возможность значительно чаще выдавать в УК значение θ1 по сравнению с θΗΚ.
Аналогичным образом с использованием интеграторов 12 и 5 а также фильтров 13 и 6 определяются текущие значения килевой качки ψ1=ψΗΚ+Δψ~ и курса корабля Κ1=KНК+ΔK~. Для определения значений θ1 и ψ1 использовался преобразователь координат ПК3, на вход которого поступали значения угловых скоростей ωx, ωy, а на выходе формировались значения ωθ, ωΨ.
Определение Δθ0 осуществляется путем сравнения θБО и θΗΚ между собой.
Значение Δθ0=θБО-θΗΚ поступает на вход интегратора 17, выходная величина которого через запоминающее устройство 16 добавляется к θΗΚ. В результате работы интегратора его входная величина обнуляется, a Δθ0 оказывается добавленной к θΗΚ. Значение этой добавки запоминается в устройстве 16 и суммируется с θ1. При этом определяется значение θСК=θ1+Δθ0. Аналогичным образом определяются Δψ0 и ψСК=ψ1+Δψ0 с использованием интегратора 19 и запоминающего устройства 18.
Процедуру определения и запоминания значений Δθ0 и Δψ0 целесообразно проводить при малых значениях углов θ и ψ, например, при отсутствии интенсивной качки и маневрирования корабля или в условиях ошвартованного корабля.
Угол ΔΚ0, на который развернуты между собой вокруг вертикальной оси системы координат БО и НК, определяется следующим образом. Значения θБΟ, ψБО и θНК, ψНК связаны между собой следующими соотношениями:
θНК=θБО cos ΔΚ0+ψБО sin ΔΚ0; ψНК=ψБО cos ΔΚ0-θБО sin ΔΚ0.
С учетом малости ΔΚ0 получим: θΗΚ=θБО+ψБΟ ΔΚ0; ψΗК=ψБО-θБΟ ΔΚ0
Такие величины вырабатываются на выходе ПК4. Вычитая из них, соответственно, (θΗΚ+Δθ0) и (ψΗΚ+Δψ0), получим значения в данный момент времени величин на входах множительных устройств 14 и 15:
(θΗΚ+Δθ~+Δθ0)-(θΗΚ+Δθ0)+ ψБОΔΚ0=ψБОΔΚ0+Δθ~,
(ψΗΚ+Δψ~+Δψ0)-( ψΗΚ+Δψ0)-θБОΔΚ0=-θБОΔΚ0+Δψ~.
На выходах множительных устройств 14 и 15, соответственно, образуются величины:
(ψБΟΔΚ0+Δθ~)ψБО=(ψБО)2ΔΚ0+ψБΟΔθ~,
(-θБОΔΚ0+Δψ~)θБО=-(θБО)2ΔΚ0+θБΟΔψ~).
Сумма этих текущих величин {-[(ψБО)2+(θБО)2]ΔΚ0-ψБОΔθ~+Δψ~θБΟ} через фильтр 9, интегратор 8 и запоминающее устройство 7 управляет работой ПК4. Сигналы ψБО Δθ~ и θБО Δψ~ подавляются фильтром и не влияют на работу системы. Постоянная составляющая величины - [(ψБО)2+(θБО)2]ΔΚ0 поступает на вход интегратора, выход которого через ПК4 аналитически совмещает по азимуту системы координат БО и НК. При этом входная величина интегратора обнуляется, а на его выходе сохраняется значение величины - ΔΚ0. Результирующий текущий угол ρБО наклона палубы в месте установки БО определяется из соотношения (ρБО)2=(ψБО)2+(θБО)2. Таким образом, статическая поправка курса ΔΚ0 вычисляется сравнением между собой направлений, вокруг которых в данный момент времени происходят наклоны палубы в местах расположения БО и НК с последующим осреднением результатов сравнения. Совокупность устройств определения значения ΔΚ0 и их связи между собой образуют систему автоматического регулирования, на входы которой поступают текущие значения величин θБО, ψБО и θНК, ψНК. Точность вычисления ΔΚ0 зависит от величины (ρБО)2.
Поэтому определение или обновление значения ΔΚ0 целесообразно осуществлять в условиях достаточно интенсивной качки корабля или при его значительных наклонах.
Величина статической поправки курса ΔΚ0 запоминается и используется при других условиях эксплуатации корабля.
Процедура определения значения ΔΚ0 выполняется после выполнения процедур определения значений величин Δθ0 и Δψ0. Тем самым ослабляется влияние взаимной связи вычислений этих величин на точность измерений.
Согласно еще одному аспекту, предлагаемое изобретение относится к способу определения параметров угловой ориентации систем корабля с учетом деформаций его корпуса.
Функциональная схема предлагаемого способа аналогична структурной схеме предлагаемой системы.
Согласно предложенному способу текущие параметры угловой ориентации устройства корабля вычисляются путем совместной обработки информации, приведенной в одну систему координат, блока ориентации, соединенного с устройством корабля, и навигационного комплекса корабля, причем текущие значения углов качек и курса, без учета значений статических угловых рассогласований блока ориентации относительно навигационного комплекса корабля, определяются в каждом канале вычисления значений данной величины путем интегрирования суммы угловой скорости данной величины, определенной модулем ориентации, и отфильтрованной разности величин, определенных навигационным комплексом и ее значения, вычисленного в процессе интегрирования, а статические угловые рассогласования системы координат блока ориентации относительно навигационного комплекса по углам бортовой и килевой качкам вычисляются путем фильтрации и запоминания результатов сравнения между собой соответствующих углов, определенных модулем ориентации и навигационным комплексом, причем статическое угловое рассогласование по курсу блока ориентации относительно навигационного комплекса вычисляется и запоминается после определения статических рассогласований по углам бортовой и килевой качек путем сведения к минимуму соответствующим преобразованием координат суммы результатов умножений разностей значений углов бортовой качки, определенных модулем ориентации и навигационным комплексом, умноженной на значение угла килевой качки, и разностей значений углов килевой качки, определенных модулем ориентации и навигационным комплексом, умноженной на значение углов бортовой качки.
Заявленное изобретение может быть также использовано для определения взаимной ориентации нескольких систем, расположенных на корабле. В этом случае на каждой системе устанавливается блок ориентации. Совместная обработка информации этих блоков в соответствии с заявленным изобретением позволяет определить их взаимную ориентацию.
Заявленное изобретение может также найти применение на других объектах, например самолетах и вертолетах.
Способ обнаружения взрывчатого вещества в контролируемом предмете
Защитный материал от нейтронного излучения и сцинтилляционный детектор гамма-излучения
Способ построения радиолокационной станции кругового обзора привязного аэростата
Способ отождествления пеленгов источников радиоизлучений по их радиотехническим характеристикам двухпозиционными пассивными радиоэлектронными средствами
Способ и система управления пуском и взрывом реактивного снаряда
Способ определения курса, угла места и координат пакета направляющих реактивной системы залпового огня
Устройство для выработки электрической энергии в артиллерийском снаряде
Система управления пуском и взрывом реактивного снаряда
Ортопедическое устройство
Инерционный способ определения начальной скорости управляемого снаряда нарезного орудия
Способ обнаружения взрывчатого вещества в контролируемом предмете
Защитный материал от нейтронного излучения и сцинтилляционный детектор гамма-излучения
Способ построения радиолокационной станции кругового обзора привязного аэростата
Способ и система управления пуском и взрывом реактивного снаряда
Способ определения курса, угла места и координат пакета направляющих реактивной системы залпового огня
Способ стрельбы реактивной системы залпового огня
Устройство для выработки электрической энергии в артиллерийском снаряде
Система управления пуском и взрывом реактивного снаряда
Ортопедическое устройство
Способ измерений угловых отклонений вращающегося ротора трехстепенного гироскопа относительно его корпуса и скорости вращения ротора

