Результат интеллектуальной деятельности: СПОСОБ ОТОБРАЖЕНИЯ ИЗОБРАЖЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее раскрытие относится к технологии получения изображения с помощью компьютерной томографии (CT) и, в частности, к способу отображения изображения в CT-системе.
Уровень техники
После событий в Америке 11 сентября все большее внимание уделяется контролю безопасности в области авиации. Изделия для контроля безопасности на основе CT-технологии совершили резкий прогресс и их характеристики явно достигли передовых показателей. Американское агентство стандартизации на транспорте (TSA) полагает, что CT-устройства и их способы обнаружения являются важными путями реализации контроля безопасности в аэропорту. Обычные машины для вещей, то есть рентгеновские машины, добились получения изображения в перспективе, создав резкие DR-изображения, сформировавшие стойкое впечатление в умах пользователей. Пользователи хорошо знакомы с DR-изображениями. В DR-системе источник рентгеновского излучения и детекторы неподвижно закреплены и не вращаются. Эти DR-изображения обычно явления изображениями в верхнем углу просмотра или изображениями в нижнем углу просмотра, которые очень интуитивны и удобны для просмотра. Богатый опыт, накопленный в области считывания изображений и распознавания изображений, основан на этих интуитивных DR-изображениях. Для просмотра более чем нескольких десятков тысяч реальных DR-изображений необходим высококлассный распознаватель изображения. Человеку обычно понадобится работать более 90 рабочих дней, чтобы стать первоклассным распознавателем изображения. В настоящее время существуют многочисленные превосходные распознаватели, работающие в таких отраслях, как здравоохранение, контроль безопасности и т.п. При отсутствии DR-изображения эти опытные распознаватели изображения не могут правильно осуществлять распознавание изображений.
Хотя некоторые существующие СТ-системы дают готовые трехмерные данные, это не DR-изображение. Распознаватель изображения может испытать непривычность, когда он/она внезапно присматривает трехмерное изображение. Например, из-за неподходящего угла зрения запрещенные вещи (например, оружие) могут выглядеть в трехмерном изображении небольшим скоплением и структура его будет неясна. Когда распознаватель изображения внезапно просматривает трехмерное изображение, он/она не знает, почему оружие внезапно стало выглядеть небольшим скоплением. Когда распознаватель изображения индивидуально просматривает трехмерное изображение, он/она еще не знает, что везет пассажир. Поэтому, даже если существует трехмерное изображение, распознаватель изображения все же хочет сравнить трехмерное изображение с хорошо знакомым DR-изображением и использовать существующий богатый опыт распознавания изображений для DR-изображения. То есть распознаватель изображения хочет получить такое расположение, при котором дисплей расположен слева для отображения DR-изображения и дисплей расположен справа, чтобы отображать CT-изображение. При существующем опыте распознавания изображений для DR-изображения, многочисленные распознаватели изображения могут более быстро, более удобно и более точно узнать, что перевозит пассажир. Таким образом, может быть сэкономлен большой объем трудовых ресурсов и времени.
Кроме того, для CT-устройства, имеющего DR-систему, если пользователь занимает определенное положение, необходимо осуществить DR-CT-регистрацию, чтобы отображать срез в конкретном положении. Может быть известно, приходится ли это конкретное положение на передний участок, средний участок или задний участок багажа, основываясь на кодировании ленты конвейера аппаратного обеспечения. Однако, если ленточное кодирование не сделано или отсутствует или не может достигнуть совпадения в процессе транспортирования, способ не может точно реализовывать регистрацию. Существует необходимость в новом и эффективном способе регистрации.
Раскрытие изобретения
С точки зрения одной или более проблем на предшествующем уровне техники, обеспечивается способ отображения изображения в CT-системе, способной отображать трехмерное изображение проверяемого объекта вместе с DR-изображением в случае, когда CT-система не имеет устройства получения DR-изображения.
В варианте настоящего раскрытия обеспечивается способ отображения изображения в системе компьютерной томографии (CT), содержащий этапы, на которых: осуществляют СТ-сканирование проверяемого объекта для получения данных CT-проекции; организуют данные CT-проекций в соответствии с предварительно определенным интервалом; извлекают базовые данные из организованных данных CT-проекций, используя фиксированный угол в качестве начального угла и используя 360 градусов в качестве интервала; формируют изображение цифровой радиографии (Digital Radiography, DR), основываясь на извлеченных базовых данных; реконструируют трехмерное изображение проверяемого объекта на основе данных CT-проекции; и одновременно отображают на экране DR-изображение и реконструированное трехмерное изображение.
В соответствует с некоторыми вариантами осуществления, способ отображения изображения дополнительно содержит этапы, на которых извлекают дополнительные данные из организованных данных CT-проекции, используя фиксированный угол плюс 180 градусов в качестве начального угла и используя 360 градусов в качестве интервала; сохраняют извлеченные дополнительные данные в виде матрицы; осуществляют процесс левого-правого зеркального отображения изображения на матрице; альтернативно, вставляют дополнительные данные обработанной матрицы в базовые данные, принимая строку за единицу, чтобы получить дополненные базовые данные; и формируют DR-изображение, основываясь на дополненных базовых данных.
В соответствии с некоторыми вариантами осуществления, способ отображения изображения дополнительно содержит этапы, на которых: извлекают базовые данные из организованных данных СТ-проекции, используя другой фиксированный угол в качестве начального угла и используя 360 градусов в качестве интервала; формируют другое DR-изображение, основываясь на извлеченных базовых данных; и одновременно отображают на экране DR-изображение, другое DR-изображение и реконструированное трехмерное изображение.
В соответствии с некоторыми вариантами осуществления, этап организации данных СТ-проекции, соответствующих предварительно определенному интервалу, содержит этап, на котором: когда частота выборки выше, чем одна проекция с данными на предварительно определенный интервал, регулируют частоту выборки данных СТ-проекции до одной проекции с данными на предварительно определенный интервал в соответствии с правилом подвыборки; и когда частота выборки ниже, чем одна проекция с данными на предварительно определенный интервал, регулируют частоту выборки данных СТ-проекции до одной проекции с данными на предварительно определенный интервал в соответствии с линейной интерполяцией.
В соответствии с некоторыми вариантами осуществления, когда базовые данные является данными высокой энергии и данными низкой энергии, базовые данные обрабатываются в соответствии с алгоритмом распознавания материала для получения данных уровня серого и данных материала.
В соответствии с некоторыми вариантами осуществления, DR-изображение интерполируется для достижения разрешающей способности, требуемой пользователю, и интерполированное DR-изображение отображается на экране.
В соответствии с некоторыми вариантами осуществления, данные реконструированного трехмерного изображения являются одними из данных физической плотности, данных электронной плотности, данных атомных чисел, данных высокой энергии, данных низкой энергии, данных уровня серого и данных материала.
В другом варианте настоящего раскрытия обеспечивается способ отображения изображения в системе компьютерной томографии (СТ), содержащий этапы, на которых: осуществляют СТ-сканирование проверяемого объекта для получения данных СТ-проекции; реконструируют трехмерное изображение проверяемого объекта из данных СТ-проекции; проецируют данные трехмерного изображения H(x,y,z) проверяемого объекта в некотором угле зрения, чтобы получить цифровые радиографические (DR) данные в угле зрения, причем данные трехмерных данных H(x,y,z) имеют размерность X*Y*Z; размер Х изменяется от 1 до Х в направлении, перпендикулярном движению ленты конвейера в горизонтальной плоскости, размер Y изменяется от 1 до Y в вертикальном направлении и размер z изменяется от 1 до Z в направлении вдоль движения ленты конвейера в горизонтальной плоскости; формируют DR-изображение, основываясь на DR-данных в угле зрения; и одновременно отображают на экране DR-изображение и трехмерное изображение.
В соответствии с некоторыми вариантами осуществления, способ отображения изображения дополнительно содержит этапы, на которых: проецируют данные трехмерного изображения H(x,y,z) проверяемого объекта под другим углом зрения, чтобы получить DR-данные в углу зрения; формируют DR-изображение, основываясь на DR-данных в другом углу зрения; и одновременно отображают на экране два DR-изображения и трехмерное изображение.
В соответствии с некоторыми вариантами осуществления, угол зрения и другой угол зрения выбираются, исходя из направления, перпендикулярного движению ленты конвейера в горизонтальной плоскости, в вертикальном направлении и в направлении вдоль движения ленты конвейера в горизонтальной плоскости.
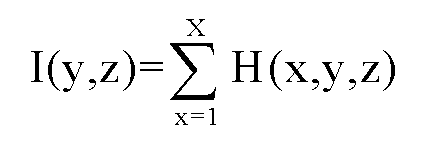
В соответствии с некоторыми вариантами осуществления, трехмерные данные H(x,y,z) проецируются вдоль направления размера x в соответствии со следующим уравнением проекции, чтобы получить двумерные данные I(y,z):
где двумерные данные являются DR-данными в боковом углу зрения, и размерностью данных является Y*Z.
В соответствии с некоторыми вариантами осуществления, трехмерные данные H(x,y,z) проецируются вдоль направления размера у согласно следующему уравнению проекции, чтобы получить двумерные данные J(x,z):
где двумерные данные являются DR-данными в нижнем или в верхнем углу зрения, и размерностью данных является X*Z.
В соответствии с некоторыми вариантами осуществления, трехмерные данные H(x,y,z) проецируются вдоль направления размера z, то есть направления движения ленты конвейера, согласно следующему уравнению проекции, чтобы получить двумерные данные K(x,y):
где двумерные данные являются DR-данными в переднем углу зрения, и размерностью данных является X*Y.
В соответствии с некоторыми вариантами осуществления, данные реконструированного трехмерного изображения являются одними из данных физической плотности, данных электронной плотности, данных атомных чисел, данных высокой энергии, данных низкой энергии, данных уровня серого и данных материала.
В приведенных выше решениях данные CT-проекции обрабатываются таким образом, чтобы получить DR-данные. После того как DR-данные получены, DR-изображение получают напрямую, используя алгоритм обработки DR-данных. Это позволяет распознавателю изображения более точно и быстрее проверять вещи, перевозимые пассажиром, используя существующий опыт распознавания изображения для DR-изображения.
В другом варианте настоящего раскрытия обеспечивается способ регистрации изображения в системе получения изображения цифровой радиографии (DR)-компьютерной (CT) томографии, причем система получения DR-CT-изображения содержит DR-устройство и СТ-устройство, и способ содержит этапы, на которых: сканируют с помощью CT-устройства проверяемый объект, чтобы получить данные CT-проекции; реконструируют трехмерное изображение проверяемого объекта из данных CT-проекции; сканируют с помощью DR-устройства проверяемый объект, чтобы получить DR-изображение; отображают DR-изображение и трехмерное изображение на экране; извлекают соответствующий столбец из данных DR-изображения ответ на выбор пользователем конкретного положения в DR-изображении; получают вспомогательные DR-данные в том же самом углу зрения, что и DR-изображение, из трехмерного изображения; вычисляют корреляции между столбцом в DR-изображении и различными столбцами во вспомогательных DR-данных; и одновременно отображают изображение среза, соответствующее столбцу во вспомогательных DR-данных, которые имеют наибольшую корреляцию со столбцом в DR-изображении, на экране вместе с DR-изображением.
В соответствии с некоторыми вариантами осуществления, этап получения вспомогательных DR-данных в том же самом углу зрения, что и DR-изображение, получаемое из трехмерного изображения, содержит: проецирование данных трехмерного изображения H(x,y,z) проверяемого объекта вдоль направления размера y, чтобы получить DR-данные в углу зрения, причем данные трехмерных данных H(x,y,z) имеют размерность X*Y*Z, размер X изменяется от 1 до X в направлении, перпендикулярном движению ленты конвейера в горизонтальной плоскости, размер Y изменяется от 1 до Y в вертикальном направлении, и размер z изменяется от 1 до Z в направлении вдоль направления движения ленты конвейера в горизонтальной плоскости.
В соответствии с некоторыми вариантами осуществления, трехмерные данные H(x,y,z) проецируются вдоль направления размера у согласно следующему уравнению проекции, чтобы получить двумерные данные J(x,z):
где двумерные данные являются DR-данными в нижнем или в верхнем углу зрения, и размерностью данных является X*Z.
В другом варианте настоящего раскрытия обеспечивается способ регистрации изображения в системе получения изображения в цифровой радиографии(DR)-компьютерной томография (CT), причем система DR-CT получения изображения содержит DR-устройство и CT-устройство и способ содержит этапы, на которых: сканируют с помощью CT-устройства проверяемый объект, чтобы получить данные CT-проекции; сканируют с помощью DR-устройства проверяемый объект, чтобы получить DR-изображение; отображают DR-изображение на экране; извлекают соответствующий столбец из данных DR-изображения в ответ на выбор пользователем конкретного положения в DR-изображении; получают вспомогательные DR-данные в том же самом углу зрения, что и DR-изображение, из от данных СТ-проекции; вычисляют корреляции между столбцом в DR отображает и другими столбцами во вспомогательных DR-данных; реконструируют трехмерное изображение проверяемого объекта из данных СТ-проекции; и одновременно отображают на экране изображение среза, соответствующего столбцу во вспомогательных DR-данных, который имеет наибольшую корреляцию со столбцом в DR-изображении, вместе с DR-изображением.
В соответствии с некоторыми вариантами осуществления, этап получения вспомогательных DR-данных в том же самом углу зрения, что и DR-изображение, получаемое из данных СТ-проекции, содержит этапы, на которых: организуют данные СТ-проекции в соответствии с предварительно определенным интервалом; и извлекают вспомогательные данные из организованных данных СТ-проекции, используя фиксированный угол в качестве начального угла и используя 360 градусов в качестве интервала.
В соответствии с некоторыми вариантами осуществления, способ дополнительно содержит этапы, на которых: извлекают дополнительные данные от организованных данных СТ-проекции, используя фиксированный угол плюс 180 градусов в качестве начального угла и используя 360 градусов в качестве интервала; сохраняют извлеченные дополнительные данные в матрице; осуществляют на матрице процесс левого-правого зеркального отображения изображения; и альтернативно интерполируют дополнительные данные в обработанной матрице во вспомогательные DR-данные, принимая строку за единицу, чтобы получить дополненные вспомогательные DR-данные.
Краткое описание чертежей
Для лучшего понимания настоящего раскрытия, настоящее раскрытие будет описано подробно в соответствии с перечисленными ниже сопроводительными чертежами.
Фиг. 1 - структурная схема СТ-устройства, соответствующего варианту осуществления настоящего раскрытия;
Фиг. 2 - структурная блок-схема компьютерного процессора, показанного на фиг. 1;
Фиг. 3 - структурная блок-схема контроллера, соответствующего варианту осуществления настоящего раскрытия;
Фиг. 4 - блок-схема последовательности выполнения операций способа отображения изображения в СТ-системе, соответствующей варианту осуществления настоящего раскрытия;
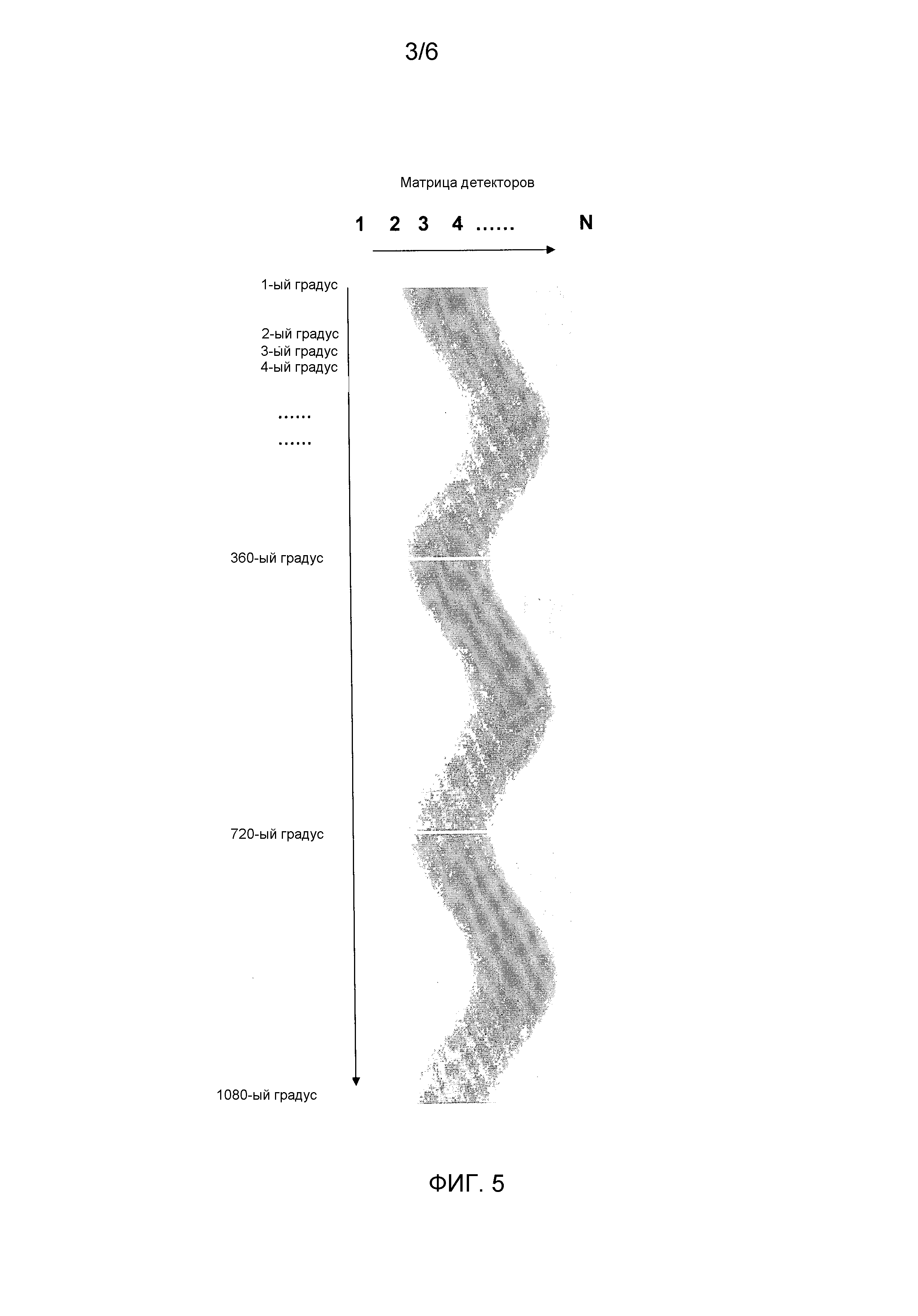
Фиг. 5 - процесс организации данных СТ-проекции;
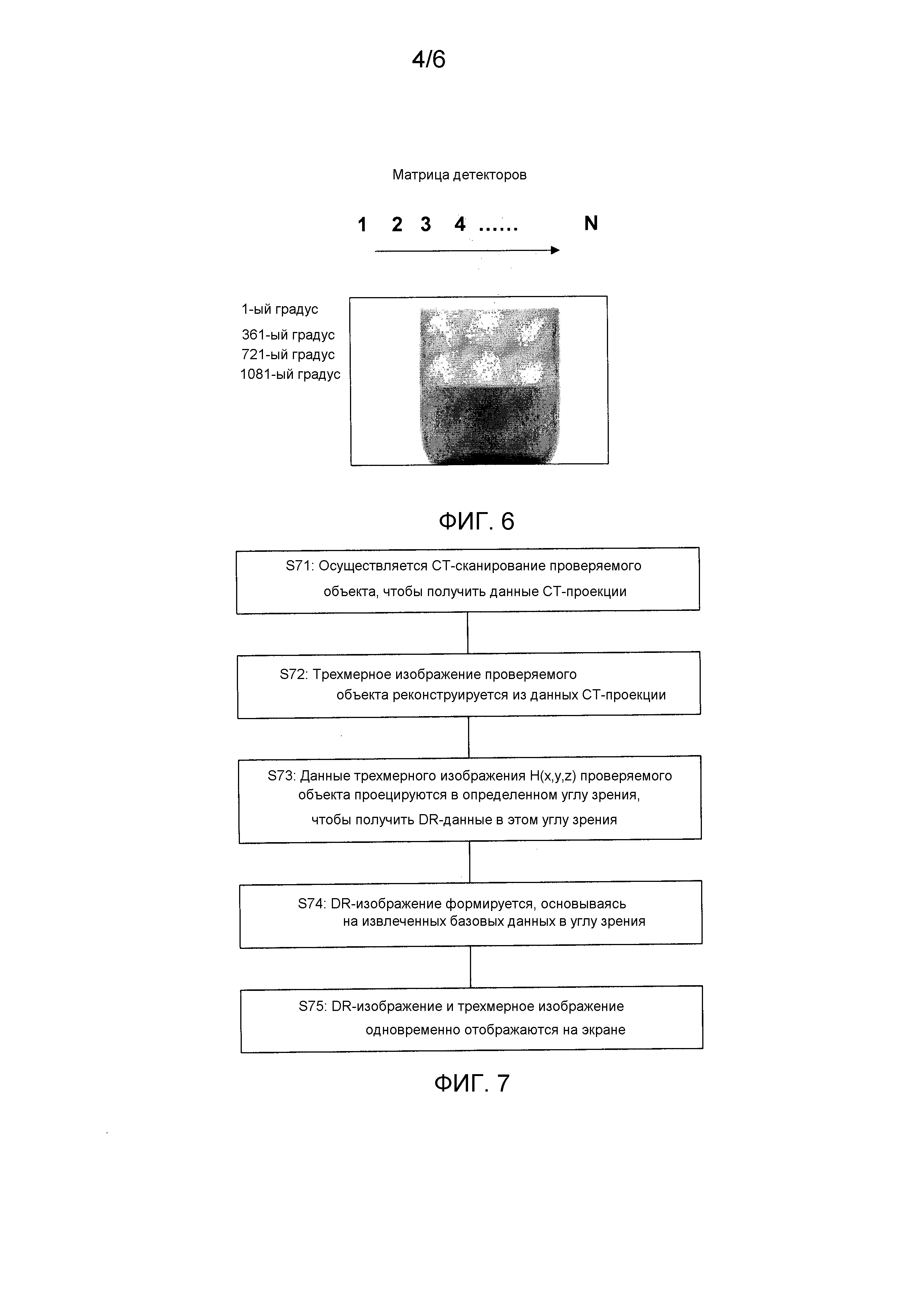
Фиг. 6 - DR-изображение, полученное из данных СТ-проекции;
Фиг. 7 - блок-схема последовательности выполнения операций способа отображения изображения в СТ-системе, соответствующей другому варианту осуществления настоящего раскрытия;
Фиг. 8 - блок-схема последовательности выполнения операций способа регистрации DR-изображения и СТ-изображения в СТ-системе, соответствующей другому варианту осуществления настоящего раскрытия; и
Фиг. 9 - блок-схема последовательности выполнения операция способа регистрации DR-изображения и CT-изображения в СТ-системе, соответствующей дополнительному варианту осуществления настоящего раскрытия.
Подробное раскрытие
Ниже будут подробно описаны конкретные варианты осуществления настоящего раскрытия. Следует заметить, что варианты осуществления здесь используются только для иллюстрации, не ограничивая настоящее раскрытие. В приведенном ниже описании объясняется множество конкретных подробностей, чтобы обеспечить лучшее понимание настоящего раскрытия. Однако, специалистам в данной области техники должно быть очевидно, что настоящее раскрытие может быть осуществлено без этих конкретных подробностей. В других случаях, известные схемы, материалы или способы конкретно не описываются, чтобы не мешать пониманию настоящего раскрытия.
В описании повсеместно ссылка на "один из вариантов осуществления", "вариант осуществления", "один пример" или "пример" означает, что конкретные признаки, структуры или свойства, описанные в сочетании с вариантом осуществления или примером, содержатся по меньшей мере в одном варианте осуществления настоящего раскрытия. Поэтому выражения "в одном из вариантов осуществления", "в варианте осуществления", "в одном примере" или "в примере", появляющиеся в различных местах повсеместно в описании, могут не обязательно относиться к одному и тому же варианту осуществления или примеру. Дополнительно, конкретные признаки, структуры или свойства могут объединяться в одном или более вариантах осуществления или примерах в любой соответствующей комбинации и/или подкомбинации. Кроме того, специалисты в данной области техники должны понимать, что термин "и/или", используемый здесь, означает любую и все комбинации одной или более перечисленных позиций.
Для проблем на предшествующем уровне техники, состоящих в том, что некоторые СТ-устройства не имеют модуля получения DR-изображения, а распознаватели изображения нуждаются в отображении DR-изображения в процессе распознавания изображения, некоторые варианты осуществления, соответствующие настоящему раскрытию, предлагают получать DR-изображение проверяемого объекта из данных СТ-проекции и отображать DR-изображение на экране вместе с реконструированным трехмерным изображением для удобства контроля безопасности распознавателем изображения, использующим существующий опыт распознавания изображения. В соответствии с описанным выше решением, вещи, перевозимые пассажиром, могут быть проверены более точно и быстрее. В некоторых вариантах осуществления данные проекции в конкретном углу зрения извлекаются из данных реконструированного трехмерного изображения и данные проекции объединяются в DR-данные в углу зрения. В других вариантах осуществления данные реконструированного трехмерного изображения проецируются в соответствии с различными углами зрения, чтобы получить DR-данные в этих углах зрения для формирования DR-изображения.
В других вариантах осуществления для проблем, при которых некоторые СТ-устройства, имеющие DR-устройство, не могут зарегистрировать DR-изображение и СТ-изображение, поскольку ленточное кодирование отсутствует или вообще не существует, предлагается получить DR-изображение в конкретном углу зрения из данных СТ-проекции или из данных реконструированного трехмерного изображения и проанализировать корреляции между столбцом, выбранным из DR-изображения, полученного DR-устройством, и DR-изображением, полученным из данных трехмерного изображения, чтобы определить срез, в котором расположен столбец с наибольшей корреляцией, и отображать срез вместе с DR-изображением.
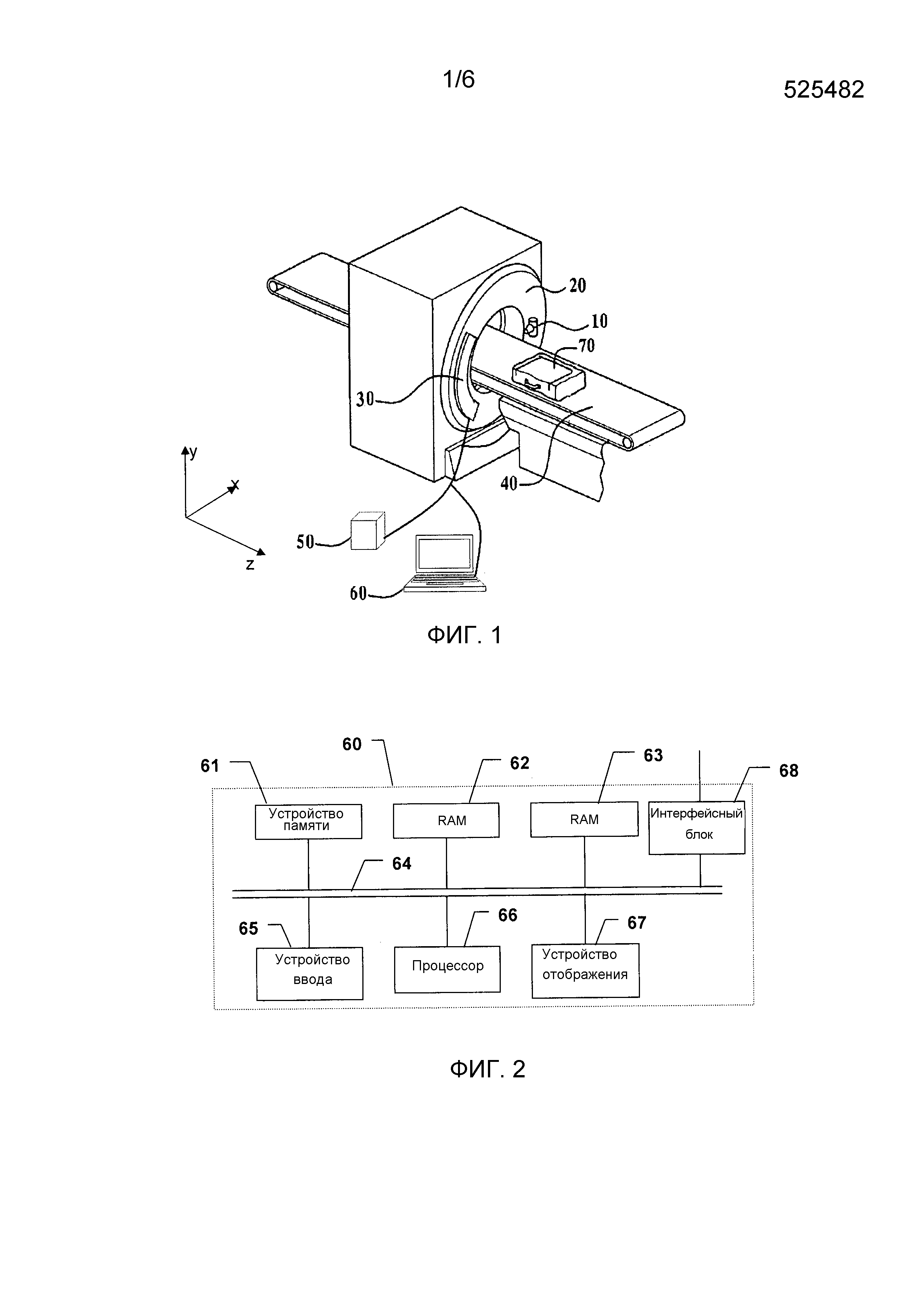
На фиг. 1 представлена структурная схема СТ-устройства, соответствующего варианту осуществления настоящего раскрытия. Как показано на фиг. 1, СТ-устройство, соответствующее настоящему варианту осуществления, содержит стойку 20, несущий элемент 40, контроллер 50, компьютерный процессор 60 и т.п. Стойка 20 содержит источник 10 рентгеновского излучения для проверки, например, рентгеновскую машину, и устройство 30 обнаружения и сбора данных. Несущий элемент 40 транспортирует проверяемый багаж 70, чтобы пропустить его через сканируемую область между источником 10 излучения и устройством 30 обнаружения и сбора данных стойки 20, в то время как стойка 20 вращается вокруг направления движения вперед проверяемого багажа 70. Таким образом, луч, излучаемый источником 10 излучения, может проходить через проверяемый багаж 70, чтобы осуществить CT-сканирование проверяемого багажа 70.
Устройство 30 обнаружения и сбора данных является, например, детекторами и устройствами сбора данных в интегрированной модульной структуре, такой как плоскопанельные детекторы для обнаружения прохождения лучей через проверяемые жидкие продукты, чтобы получить аналоговый сигнал и преобразовать аналоговый сигнал в цифровой сигнал, так чтобы вывести данные проекции проверяемого багажа 70 относительно этих рентгеновских лучей. Контроллер 50 выполнен с возможностью управления различными частями всей системы, чтобы действовать синхронно. Компьютерный процессор 60 выполнен с возможностью обработки данных, собранных устройством сбора данных, обработки и реконструкции данных и вывода результата.
Как показано на фиг. 1, источник 10 излучения может быть помещен с одной стороны проверяемого объекта, а устройство 30 обнаружения и сбора данных, в том числе, детекторы и устройства сбора данных, помещаются с другой стороны проверяемого багажа 70, чтобы получить мультиугловые данные проекции проверяемого багажа 70. Устройство сбора данных содержит схему усиления и формирования данных, которая может действовать интегрированным (непрерывным) способом или импульсным способом (с отсчетом). Кабель вывода данных устройства 30 обнаружения и сбора данных соединяется с контроллером 50 и компьютерным процессором 60, чтобы сохранять собранные данные в компьютерном процессоре 60 в соответствии с командой запуска.
На фиг. 2 показана структурная блок-схема компьютерного процессора 60, представленного на фиг. 1. Как показано на фиг. 2, данные, собранные устройством сбора данных, сохраняются в устройстве 61 памяти, присоединенном через интерфейсный блок 68 и шину 64. Постоянное запоминающее устройство 62 (ROM) имеет хранящиеся в нем информацию конфигурации и программы компьютерного процессора. Оперативная память 63 (RAM) выполнена с возможностью временного хранения различных данных при обработке операции процессором 66. Кроме того, устройство 61 памяти также имеет компьютерные программы для обработки хранящихся в нем данных. Внутренняя шина 64 выполнена с возможностью соединения между собой устройства 61 памяти, ROM 62, RAM 63, устройства 65 ввода, процессор 66, устройство 67 отображения и интерфейсный блок 68, как описано выше.
После того как пользователь вводит команду операции через устройство 65 ввода, такое как клавиатура, "мышь" и т.п., коды команды компьютерной программы управляют процессором 66, чтобы выполнить предварительно определенный алгоритм обработки данных, и после получения результата обработки данных, отобразить результат на устройстве 67 отображения, таком как жидкокристаллический дисплей (LCD) и т.п., или напрямую вывести результат обработки в форме жесткой копии, такой как распечатка.
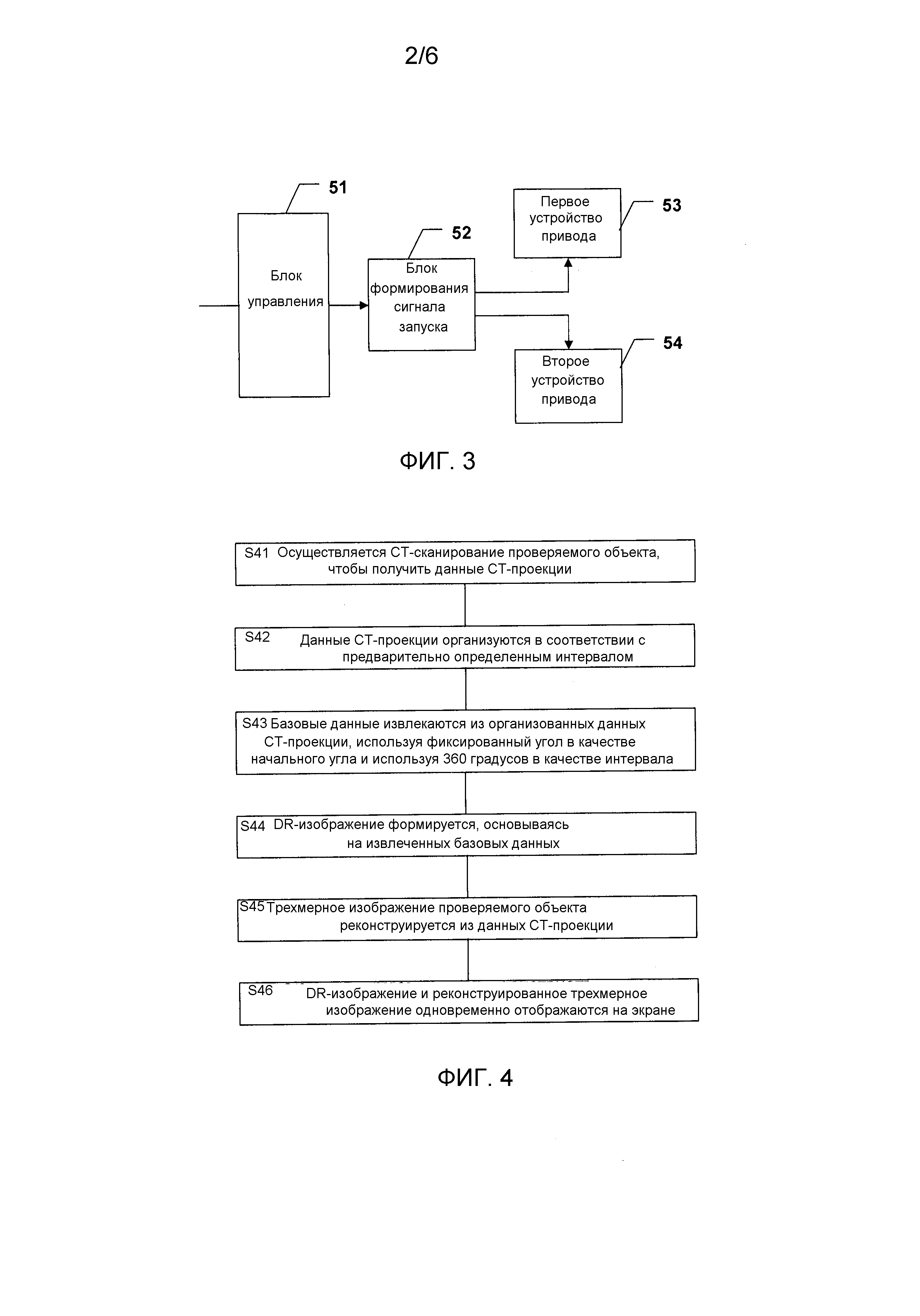
На фиг. 3 показана структурная блок-схема контроллера, соответствующего варианту осуществления настоящего раскрытия. Как показано на фиг. 3, контроллер 50 содержит блок 51 контроллера, выполненный с возможностью управления источником 10 излучения, несущим элементом 40 и устройством 30 обнаружения и сбора данных в соответствии с командой от компьютера 60; блок 52 формирования команды запуска, выполненный с возможностью формирования команды запуска для действий по запуску источника 10 излучения, устройства 30 обнаружения и сбора данных и несущего элемента 40 под управлением блока управления; первое устройство 53 привода, выполненное с возможностью привода несущего элемента 40, чтобы транспортировать проверяемый багаж 70 в соответствии с командой запуска, сформированной блоком 52 формирования сигнала запуска под управлением блока 51 управления; и второе устройство 54 привода, выполненное с возможностью привода основания 20 для вращения в соответствии с командой запуска, сформированной блоком 52 формирования сигнала запуска под управлением блока 51 управления. Данные проекции, полученные устройством 30 обнаружения и сбора данных, сохраняются в компьютере 60 для реконструкции томографических СТ-изображений, чтобы получить данные томографических изображений проверяемого багажа 70. Затем компьютер 60 получает DR-изображение проверяемого багажа 70 по меньшей мере в углу зрения из данных томографических изображений, выполняя программное обеспечение, и отображает DR-изображение вместе с реконструированным трехмерным изображением для удобства контроля безопасности распознавателем изображения. Согласно другим вариантам осуществления, описанная выше CT-система получения изображения может также быть двойной энергетической СТ-системой, то есть источник 10 излучения основания 20 может излучать два луча, то есть луч высокой энергии и луч низкой энергии, и после того как устройство 30 обнаружения и сбора данных обнаруживает данные проекции на различных энергетических уровнях, компьютерный процессор 60 осуществляет двойную энергетическую СТ-реконструкцию, чтобы получить эквивалентные атомные числа и эквивалентные данные электронной плотности различных томографических изображений проверяемого багажа 70.
На фиг. 4 показана блок-схема последовательности выполнения операций способа отображения изображения в CT-системе, соответствующей варианту осуществления настоящего раскрытия. Как показано на фиг. 4, на этапе S41 CT-система осуществляет CT-сканирование проверяемого объекта 70, чтобы получить данные СТ-проекции. Данными СТ-проекции здесь могут быть, в частности, следующие несколько данных: физическая плотность или данные электронной плотности; данные атомных чисел; данные высокой энергии; данные низкой энергии; данные уровня серого и данные материала. В варианте осуществления одна строка детекторов берется в качестве примера. Когда существует множество строк детекторов, для обработки данных многочисленные строки рассматриваются как единое целое, то есть как одна строка.
На этапе S42 данные СТ-проекции организуются в соответствии с предварительно определенным интервалом. Например, данные СТ-проекции организуются, используя в качестве интервала 1 градус. То есть существует одна проекция с данными на градус. В некоторых вариантах осуществления, когда частота выборки выше, чем одна проекция с данными на градус, частота выборки регулируется до одной проекции с данными на градус в соответствии с правилом подвыборки. Когда частота выборки слишком низкая, частота выборки регулируется до одной проекции с данными на градус в соответствии с линейной интерполяцией.
Например, данные СТ-проекции, то есть рентгенограмма венозных синусов, могут быть организованы и расположены в виде матрицы A и элемент в матрице A обозначается как A(m,n). n представляет элемент матрицы детекторов и изменяется от 1-N, где N - количество элементов в матрице детекторов, m представляет угол и изменение m представляет изменение в углу. То есть первая строка матрицы A является данными 1-N в первой степени матрицы детекторов, и вторая строка матрицы A является данными 1-N во второй степени матрицы детекторов. Все углы имеют период 360 градусов и периодически располагаются следующим образом: 1-360 градусов, 361-720 градусов, 721-1080 градусов, 1081-1440 градусов..., как показано на фиг. 5.
На этапе S43 базовые данные извлекаются из организованных данных СТ-проекции, используя фиксированный угол в качестве начального угла и используя 360 градусов в качестве интервала. Например, данные во множестве углов, например, 1 градус, 361 градусов, 721 градусов, 1081 градусов и 1441 градусов, извлекаются из данных СТ-проекций, используя круговой период 360 градусов как интервал и используя S в качестве фиксированного начального угла. То есть предположим, что фиксированный начальный угол равен S, тогда в i-м извлечении соответственный угол Angle равен:
Angle=S+i×360
где i=0, 1, 2 ... (1)
Извлеченные базовые данные реорганизуются как матрица B.
На этапе S44 DR-изображение формируется, основываясь на извлеченных базовых данных, как показано на фиг. 6. Например, матрица В, которая формируется путем реорганизации, обрабатывается в соответствии с существующим алгоритмом обработки DR-данных, чтобы сформировать DR-изображение. Когда данные являются данными высокой энергии и данными низкой энергии, данные уровня серого и данные материала получают в соответствии с алгоритмом распознавания материала.
На этапе S45 компьютерный процессор 60 выполняет программное обеспечение, чтобы реконструировать трехмерное изображение проверяемого объекта из данных СТ-проекции.
На этапе S46 на экране одновременно отображаются DR-изображение и реконструированное трехмерное изображение. В некоторых случаях DR-изображение интерполируется, чтобы достигнуть разрешающей способности, требующейся пользователю, и на дисплее отображается интерполированное DR-изображение.
В других вариантах осуществления, если в матрице В не существует достаточных данных и необходимо добавить данные, извлечение продолжает осуществляться в соответствии со следующим уравнением. Предположим, что фиксированный начальный угол равен S, тогда при i-м извлечении соответствующий угол Angle равен:
Angle=S+i×360+180
где i=0, 1, 2 ... (2)
Извлеченные данные реорганизуются как матрица B1.
Затем на матрице В1 осуществляется процесс левого-правого зеркального отображения, то есть симметричные элементы на левой и на правой сторонах меняются местами друг с другом в соответствии со следующим уравнением:
Затем полученная матрица B1 альтернативно интерполируется в матрицу В, принимая строку за единицу, чтобы объединиться с матрицей В и сформировать матрицу C. Размерностью данных является M*N. Комбинационное уравнение имеет вид:
 (4)
(4)
Наконец, матрица С обрабатывается в соответствии с существующим DR-алгоритмом обработки данных, чтобы сформировать DR-изображение. Когда данные являются данными высокой энергии и данными низкой энергии, данные уровня серого и данные материала получают в соответствии с алгоритмом распознавания материала.
В описанном выше варианте осуществления фиксированный начальный угол S определяет направление угла зрения DR-изображения. Например, когда S=1, может получен верхний угол зрения; когда S=180, может быть получен нижний угол зрения, когда S=90, может быть получен левый угол зрения; и когда S=270, может быть получен правый угол зрения.
В вышеупомянутом варианте осуществления получают DR-изображение в одном углу зрения. Если необходимо, в качестве начального угла может использоваться другой фиксированный угол, отличный от вышеупомянутого угла S, чтобы сформировать DR-данные в углу. После того как соответствующее DR-изображение получено, DR-изображение отображается на экране вместе с упомянутым выше DR-изображением и реконструированным трехмерным изображением для контроля безопасности распознавателем изображения.
Кроме того, в некоторых вариантах осуществления, могут существовать одна или более строк детекторов в СТ-системе и изображение в любом углу зрения (включая верхний угол зрения, нижний угол зрения и боковой угол зрения) может быть получено, используя СТ-данные. Альтернативно, используя СТ-данные, могут быть получены изображения в любых двух углах зрения, то есть в двойном углу зрения. Кроме того, используя СТ-данные, могут быть получены изображения в любых многочисленных углах зрения, то есть в мультиуглу зрения.
На фиг. 7 представлена блок-схема последовательности выполнения операций способа отображения изображения в СТ-системе, соответствующей другому варианту осуществления настоящего раскрытия. Как показано на фиг. 7, на этапе S71 СТ-система осуществляет CT-сканирование проверяемого объекта, чтобы получить данные СТ-проекции. Затем, на этапе S72 компьютер 60 реконструирует трехмерное изображение проверяемого объекта из данных СТ-проекции. Реконструированные трехмерные данные здесь могут быть, в частности, следующими несколькими данными: данные физической плотности или данные электронной плотности; данные атомных чисел; данные высокой энергии; данные низкой энергии; данные уровня серого и данные материала.
На этапе S73 данные трехмерного изображения H(x,y,z) проверяемого объекта проецируются в определенном углу зрения, чтобы получить DR-данные в углу зрения, в котором трехмерные данные H(x,y,z) имеют размерность X*Y*Z, причем размер X изменяется от 1 до X в направлении, перпендикулярном движению ленты конвейера в горизонтальной плоскости, размер Y изменяется от 1 до Y в вертикальном направлении и размер z изменяется от 1 до Z в направлении вдоль движения ленты конвейера в горизонтальной плоскости.
Например, проекция осуществляется в соответствии с требуемым углом зрения при следующих трех условиях:
(1) Трехмерные данные H(x,y,z) проецируются вдоль направления размера x согласно следующему уравнению проекции, чтобы получить двумерные данные I(y,z):
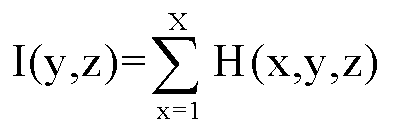 (5)
(5)
Двумерные данные являются DR-данными в боковом углу зрения. Размерностью данных является Y*Z.
(2) Трехмерные данные H(x,y,z) проецируются вдоль направления размера у согласно следующему уравнению проекции, чтобы получить двумерные данные J(x,z):
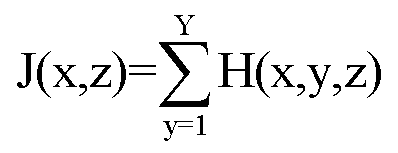 (6)
(6)
Двумерные данные являются DR-данными в нижнем или верхнем углу зрения. Размерностью данных является X*Z.
(3) Трехмерные данные H(x,y,z) проецируются вдоль направления размера z, то есть движения ленты конвейера, согласно следующему уравнению проекции, чтобы получить двумерные данные K(x,y):
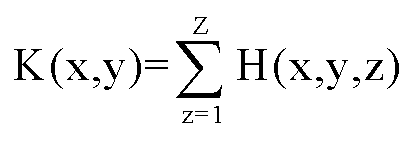 (7)
(7)
Двумерные данные являются DR-данными в переднем углу зрения. Размерностью данных является X*Y.
На этапе S74 DR-изображение формируется, основываясь на DR-данных в углу зрения. Например, после того как DR-данные получены, DR-данные обрабатываются в соответствии с существующим алгоритмом обработки DR-данных, чтобы сформироваться DR-изображение. Когда данные являются данными высокой энергии и данными низкой энергии, данные уровня серого и данные материала получают в соответствии с алгоритмом распознавания материала.
На этапе S75 DR-изображение и трехмерное изображение одновременно отображаются на экране. Например, DR-изображение интерполируется, чтобы достигнуть разрешающей способности, требуемой пользователем, и интерполированное DR-изображение отображается на дисплее.
Хотя выше описано условие, при котором СТ-система не имеет DR-устройства, в некоторых системах CT, имеющих DR-устройство, необходимо регистрировать DR-изображение и изображение среза. Например, СТ-устройство, имеющее DR-систему, требует, чтобы после того как для отображения среза пользователь щелкнет по определенному месту на DR-изображении, из трехмерных данных можно было бы определить, находится ли точное положение среза на участке в начале, в средней части или в задней части багажа. В трехмерных данных имеется много срезов. Чтобы получить точное положение из трехмерных данных для отображения среза, на основе кодирования ленты конвейера аппаратного обеспечения может быть известно, находится ли точное положение на участке в начале, в средней части или в задней части багажа. Однако, поскольку кодирование ленты конвейера пропущено или отсутствует или может не достигнуть согласования в процессе транспортировки, система не может точно осуществлять регистрацию.
Для описанных выше проблем вариант осуществления настоящего раскрытия предлагает вычисление корреляции между столбцом в DR-изображении, полученном DR-устройством, и каждым столбцом в DR-данных, извлеченных из реконструированного трехмерного изображения, и отображение изображения пластины, соответствующее столбцу с самой большой корреляцией, на экране вместе с DR-изображением. DR-данные здесь могут быть, в частности, следующими несколькими данными: данные физической плотности или электронной плотности; данные атомных чисел; данные высокой энергии; данные низкой энергии; данные уровня серого; данные материала и т.д.
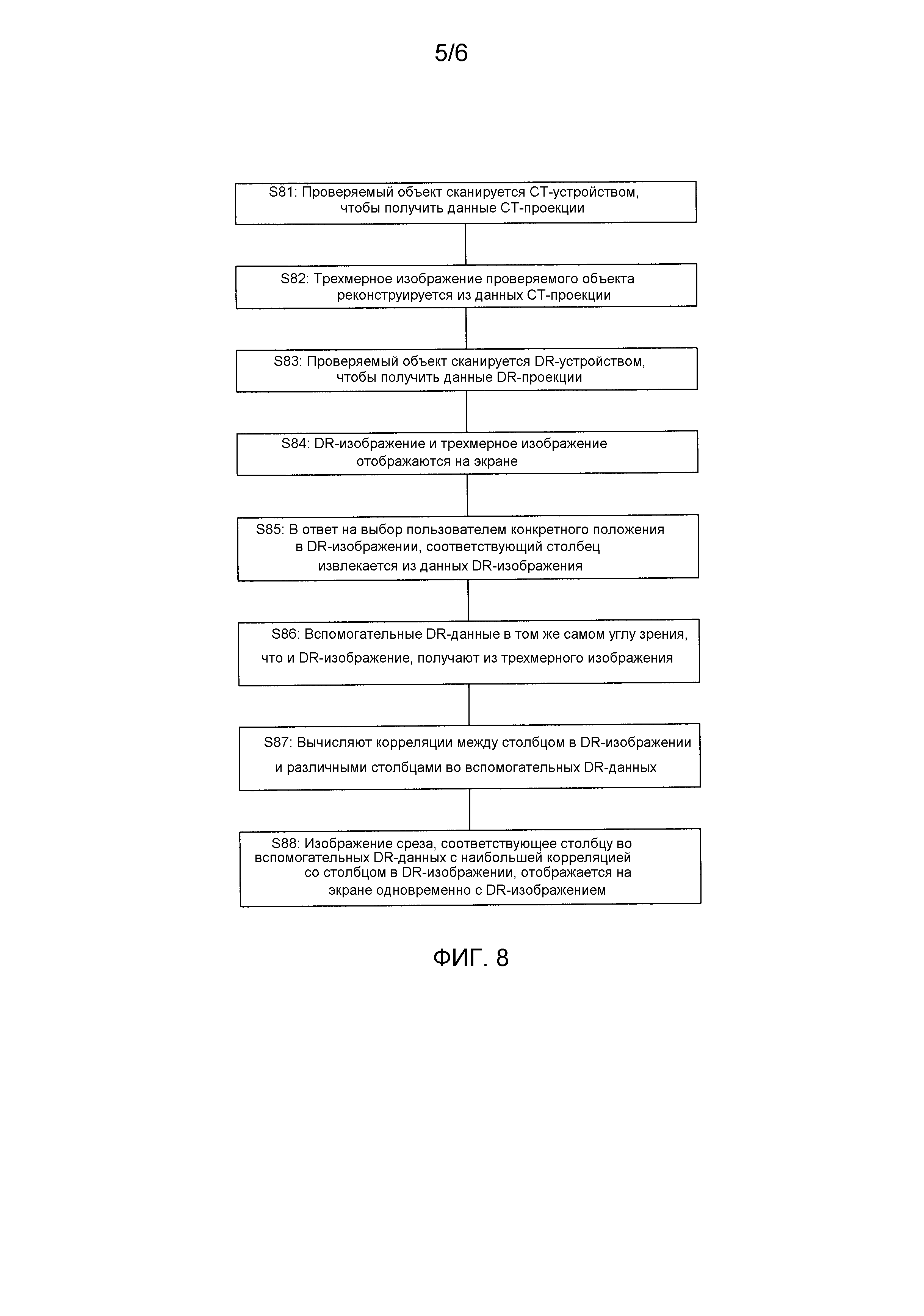
На фиг. 8 представлена блок-схема последовательности выполнения операций способа регистрации DR-изображения и СТ-изображения в СТ-системе в соответствии с другим вариантом осуществления настоящего раскрытия.
На этапе S81 проверяемый объект сканируется СТ-устройством, чтобы получить данные СТ-проекции. На этапе S82 компьютер 60 выполняет программное обеспечение, чтобы реконструировать трехмерное изображение проверяемого объекта из данных СТ-проекции.
На этапе S83 проверяемый объект сканируется DR-устройством, чтобы получить DR-изображение. Затем, на этапе S84 полученные DR-изображение и реконструированное трехмерное изображение отображаются на экране для удобства контроля безопасности распознавателем изображения.
Если распознаватель изображения хочет просмотреть изображение среза, соответствующее определенному столбцу в DR-изображении, распознаватель изображения может управлять устройством 65 ввода, таким как "мышь", чтобы щелкнуть по столбцу для удобства более точной проверки. На этапе S85, в ответ на выбор пользователем конкретного положения в DR-изображении, соответствующий столбец извлекается из данных DR-изображения. Затем на этапе S86 компьютер 60 получает вспомогательные DR-данные в том же самом углу зрения, что и DR-изображение из трехмерного изображения.
Например, DR-система формирует DR-данные и пользователь указывает определенное положение в DR-данных, используя "мышь". DR-данные, в которых находится это положение, распространяются вдоль направления элементов матрицы детекторов и обозначаются как Array0(n), где n изменяется от 1 до N. N - множество элементов в матрице детекторов. Данные фактически являются матрицей данных и хранят данные всех элементов в матрице детекторов.
DR-данные получают из СТ-данных в соответствии со способом, показанным на фиг. 7, и обозначаются как J, где элементами в J являются J(x,z). Матрица J транспозируется, чтобы получить J1, где элементами в J1 являются J1(z,x). J1 интерполируется в соответствии с требуемым размером M*N, чтобы получить матрицу C с размером матрицы M*N.
В некоторых вариантах осуществления этап получения вспомогательных DR-данных в том же самом углу зрения, как тот, в котором получают DR-изображение из трехмерного изображения, содержит этапы, на которых: проецируют данные трехмерного изображения H(x,y,z) проверяемого объекта вдоль направления размера y, чтобы получить DR-данные в углу зрения, причем данные трехмерных данных H(x,y,z) имеют размерность X*Y*Z, размер X изменяется от 1 до X в направлении, перпендикулярном к направлению движения ленты конвейера в горизонтальной плоскости, размер Y изменяется от 1 до Y в вертикальном направлении и размер z изменяется от 1 до Z в направлении вдоль движения ленты конвейера в горизонтальной плоскости. Например, трехмерные данные H(x,y,z) проецируются вдоль направления размера y, чтобы получить двумерные данные J(x,z) в соответствии с приведенным выше уравнением (6).
Затем на этапе S87 компьютер 60 вычисляет корреляции между столбцом в DR-изображении и различными столбцами во вспомогательных DR-данных и на этапе S88 на экране одновременно отображаются изображение среза, соответствующее столбцу во вспомогательных DR-данных с самой большой корреляцией со столбцом в DR-изображении, вместе с DR-изображением.
Например, определенная строка извлекается из матрицы C, например, когда m=1 и n изменяется от 1 до N, строка обозначается как матрица Array1(n) данных. Ошибка E вычисляется в соответствии со следующим уравнением:
 (8)
(8)
Описанный выше этап повторяется. Следующая строка извлекается, например, когда m=2 и n изменяется от 1 до N, строка обозначается как матрица Array1(n) данных и так повторяется, пока не будут пройдены все строки в матрице С. Наконец, ищут все E, одну за другой, для m, соответствующего минимальному значению, и это положение сопоставляется. Данные H(x,y,z=m) извлекаются из трехмерных данных H(x,y,z) и отображаются на дисплее вместе с DR-изображением.
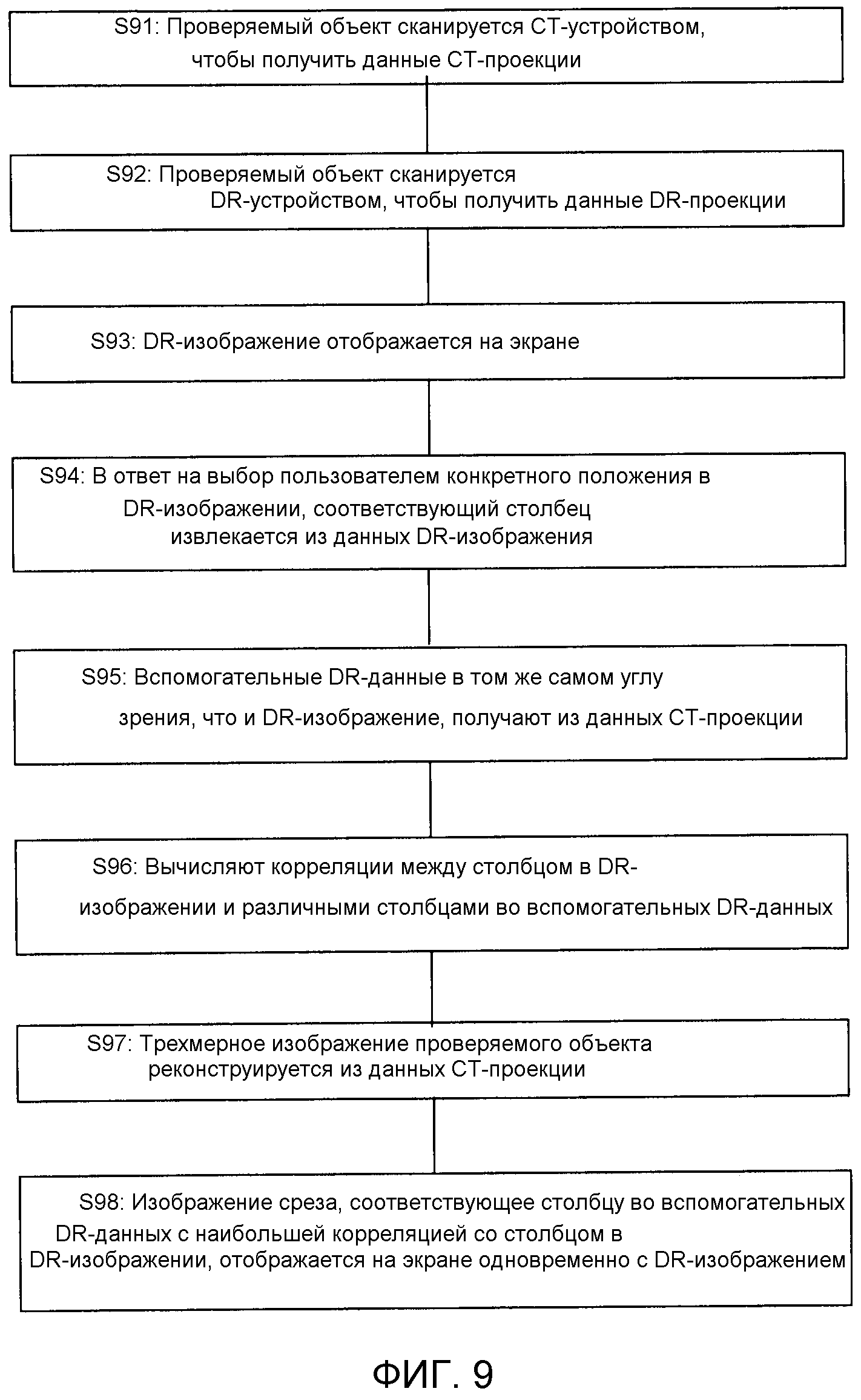
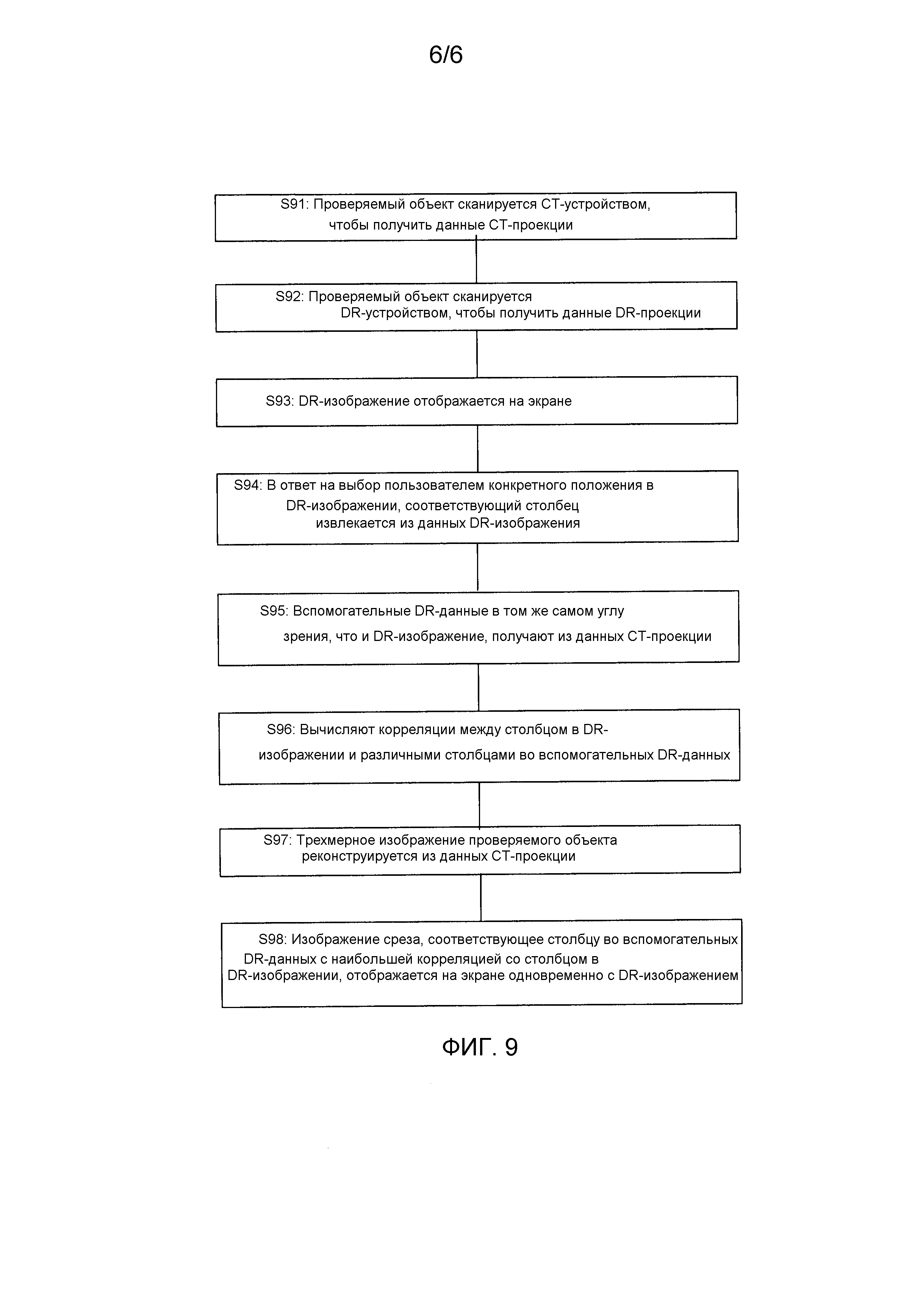
Приведенное выше описание относится к варианту осуществления получения и регистрации вспомогательных DR-данных после реконструкции трехмерного изображения. Аналогично, вспомогательные DR-данные могут также быть получены до того, как трехмерное изображение будет реконструировано, и затем использоваться для регистрации изображения. На фиг. 9 показана последовательность выполнения операций способа регистрации DR-изображения и СТ-изображения в СТ-системе в соответствии с дополнительным вариантом осуществления настоящего раскрытия.
В способе регистрации изображения в системе DR-CT, показанной на фиг. 9, система получения изображения DR-CT содержит DR-устройство и СТ-устройство. На этапе S91 проверяемый объект сканируется СТ-устройством, чтобы получить данные СТ-проекции. На этапе S92 проверяемый объект сканируется DR-устройством, чтобы получить DR-изображение. Затем на этапе S93 DR-изображение отображается на экране.
Если распознаватель изображения хочет просмотреть изображение среза, соответствующего определенному столбцу в DR-изображении, распознаватель изображения может управлять устройством 65 ввода, таким как "мышь", чтобы щелкнуть по столбцу для удобства более точной проверки. На этапе S94, в ответ на выбор пользователем конкретного положения в DR-изображении, соответствующий столбец извлекается из данных DR-изображения.
На этапе S95 вспомогательные DR-данные в том же самом углу зрения, что и DR-изображение получают из данных СТ-проекции;
на этапе S96 вычисляются корреляции между столбцом в DR-изображении и различными столбцами во вспомогательных DR-данных;
на этапе S97 трехмерное изображение проверяемого объекта реконструируется из данных СТ-проекции; и
на этапе S98 изображение среза, соответствующее столбцу во вспомогательных DR-данных с самой большой корреляцией со столбцом в DR-изображении, отображается на экране одновременно с DR-изображением.
В некоторых вариантах осуществления этап получения вспомогательных DR-данных в том же самом углу зрения, что и для DR-изображения из данных СТ-проекции содержит этапы, на которых: организуют данные СТ-проекции в соответствии с предварительно определенным интервалом; и извлекают вспомогательные данные из организованных данных СТ-проекции, используя фиксированный угол в качестве начального угла и используя 360 градусов в качестве интервала.
В других вариантах осуществления упомянутый выше способ дополнительно содержит этапы, на которых извлекают дополнительные данные из организованных данных СТ-проекции, используя фиксированный угол плюс 180 градусов в качестве начального угла и используя 360 градусов в качестве интервала; сохраняют извлеченные дополнительные данные в матрице; осуществляют процесс левого-правого зеркального отображения изображения на матрице; и альтернативно вставляют дополнительные данные в обработанную матрицу во вспомогательных DR-данных, принимая строку за единицу, чтобы получить дополненные вспомогательные DR-данные.
В предшествующем подробном описании изложены различные варианты осуществления способа отображения изображения и способа регистрации изображения изложены с помощью использование схем, блок-схем последовательностей выполнения операций и/или примеров. В случае, когда такие схемы, блок-схемы последовательностей выполнения операций и/или примеры содержат одну или более функций и/или операций, специалисты в данной области техники должны понимать, что каждая функция и/или операция в пределах таких схем, блок-схем последовательностей выполнения операций или примеров может осуществляться индивидуально и/или коллективно посредством большого разнообразия структур, аппаратного обеспечения, программного обеспечения, встроенных программ или фактически любой их комбинации. В одном из вариантов осуществления несколько фрагментов предмета изобретения, описанного в вариантах осуществления настоящего раскрытия, могут быть осуществлены с помощью специализированных интегральных схем (ASIC), программируемых логических интегральных схем (FPGA), цифровых сигнальных процессоров (DSP), или других интегрированных форматов. Однако, специалисты в данной области техники должны понимать, что некоторые аспекты вариантов осуществления, раскрытые здесь, полностью или частично, могут эквивалентно быть осуществлены в интегральных схемах, как одна или более компьютерных программ, работающих на одном или более компьютерах (например, как одна или более программ, работающих на одном или более компьютерных системах), как одна или более программ, работающих на одном или более процессорах (например, как одна или более программ, работающих на одном или более микропроцессорах), как встроенные программы, или как фактически любая их комбинация, и что разработка схемы и/или запись кода для программного обеспечения и/или встроенных программ могут легко реализовываться в рамках умения этих специалистов в данной области техники в свете этого раскрытия. Кроме того, эти специалисты в данной области техники должны понимать, что механизмы предмета изобретения, описанного здесь, могут распространяться в качестве программного продукта во множестве форм и что иллюстративный вариант осуществления описанного здесь предмета изобретения, применяется независимо от конкретного типа носителя сигнала, используемого для фактического осуществления распространения. Примерами носителями сигнала являются, в частности, следующие: носитель записываемого типа, такой как дискета, жесткий диск, компакт-диск (CD), цифровой универсальный диск (DVD), цифровая лента, компьютерное запоминающее устройство и т.д.; и носитель передаваемого типа, такой как цифровая и/или аналоговая среда передачи данных, (например, оптоволоконный кабель, волновод, проводная линия связи, беспроводная линия связи и т.д.).
Хотя настоящее раскрытие было описано со ссылкой на несколько типичных вариантов осуществления, для специалистов в данной области техники очевидно, что термины используются для иллюстрации и целей объяснения, но не для ограничения. Настоящее раскрытие может быть реализовано на практике в различных формах, не отступая от сущности настоящего раскрытия. Следует понимать, что варианты осуществления не ограничиваются ни одной из перечисленных выше подробностей и должны истолковываться широко в пределах сущности и объема, описанных в последующей формуле изобретения. Поэтому все модификации и альтернативы, попадающие в объем формулы изобретения или ее эквивалентов, должны быть охвачены формулой изобретения как присоединенные.
Способ определения концентрации полимера в водных системах
Сканирующее устройство с использованием пучка излучения для формирования изображения в режиме обратного рассеяния и способ его осуществления
Контрольное устройство миллиметрового диапазона
Способ и сервер для передачи сообщения
Сканирующее устройство и способ визуализации с обратнорассеянным пучком излучения
Устройство для приема миллиметровых волн
Устройство, система и способ изменения многопользовательской цепочки отношений
Белое светодиодное устройство переменного тока
Устройство для испускания лучей и система формирования изображений с данным устройством
Компьютерный томограф
Сканирующее устройство с использованием пучка излучения для формирования изображения в режиме обратного рассеяния и способ его осуществления
Контрольное устройство миллиметрового диапазона
Сканирующее устройство и способ визуализации с обратнорассеянным пучком излучения
Устройство для приема миллиметровых волн
Устройство для испускания лучей и система формирования изображений с данным устройством
Компьютерный томограф
Системы и способы осмотра на основе обратного рассеяния для тела человека
Стационарное устройство компьютерной томографии
Устройство и способ лучевой сканирующей визуализации
Детектор и использующий его способ одновременного обнаружения гамма-излучения и нейтронов

