Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ
Вид РИД
Изобретение
Изобретение относится к области сейсмологии, в частности к сбору сейсмических данных в процессе проведения сейсморазведочных работ, и может быть использовано для геофизического исследования морских акваторий.
В настоящее время в мире сейсмические данные на море получают с помощью плавающих или донных (перекладываемых) кос, например, опубликованные заявки на патент US 2011/0158043, G01V 1/38 и US 2015/0003196, G01V 1/38. Существует также альтернативная система получения сейсмических данных, в которой плавающая коса заменена множеством буев, погружающихся в воду на заданную глубину, например, опубликованная заявка US 2013/0155806, G01V 1/38.
Указанные исследования относятся к методу отраженных волн в модификации общей глубинной точки (МОВ-ОГТ), получившему наибольшее распространение в нефтегазовой отрасли для изучения геологического строения. Интерпретация данных сейсморазведки MOB в сложных геологических условиях требует хорошего сейсмического изображения, которое можно получить, только если поле скоростей известно с высокой точностью.
В настоящее время развиты методики построения глубинно-скоростных моделей в рамках собственно метода МОВ-ОГТ. При всех преимуществах данных подходов их использование проблематично в средах, характеризующихся сложным скоростным распределением при отсутствии четко выраженных отражающих горизонтов. В этих случаях предлагается использовать другой тип волн - преломленные волны и сейсмотомографический подход для построения глубинно скоростной модели среды.
Для построения томографической скоростной модели среды по преломленным волнам на всю глубину разреза требуются принципиально большие удаления источник-приемник, чем это принято в работах МОВ-ОГТ, а именно материалы наблюдений метода преломленных волн (МПВ). Как правило, для этого используется технология с применением донных сейсмических станций, например, патент US 6932185, G01V 1/38, опубл. 2005 г. или европейский патент ЕР 1217390, G01V 1/38, опубл. 2002 г. Эту технологию отличает относительно низкая производительность, необходимость применения специфической техники, например подводных роботов.
Существенными также являются ограничения, связанные с глубиной в районе проведения работ и с более сложной процедурой получения разрешений при работе в экономических зонах прибрежных стран.
Известные технические решения позволяют использовать в процессе обработки и интерпретации преимущественно какой-либо один вид волн. Так при обработке данных, полученных с помощью сейсмической косы и системы буев, полезными являются отраженные волны, в то время как зарегистрированный цуг преломленных волн практически не используется (полностью удаляется на одном из первых этапов обработки данных вместе с регулярными и нерегулярным полями волн помех) в виду его малой информативности из-за сильно ограниченного набора удалений (обычно не превышающего 6-8 км). И напротив, для данных, полученных с помощью донных станций, поле отраженных волн является сильной помехой и обнуляется на первом этапе обработки, в то время как поле преломленных волн используется для получения правдивой скоростной модели и дальнейших геологических построений.
Предлагаемое техническое решение направлено на расширение арсенала технических средств сбора и записи сейсмических данных и позволяет использовать для обработки и интерпретации геологического строения среды одновременно отраженные и преломленные волны. Сейсмическая коса регистрирует отраженные волны, буи преломленные и отраженные, причем на очень больших удалениях. Это позволяет существенно расширить волновую картину принятых сигналов, на данных которой возможно построение глубинно-скоростной модели для выполнения глубинной миграции до суммирования данных МОВ-ОГТ на основании скоростной модели, полученной на этапе томографической обработки данных МПВ. В результате оказывается возможным получить данные глубинного строения земной коры вплоть до границы Мохо.
Система сбора сейсмических данных содержит первое судно с источником возбуждения сейсмических сигналов, сейсмическую косу, буксируемую первым судном, второе судно и множество сейсмических буев, предназначенных для приема и записи сейсмических сигналов во время нахождения в воде. Количество буев, применяемое при работах, определяется конкретными условиями исследований и может составлять от десятков до нескольких сотен единиц.
Первое судно также предназначено для несения множества сейсмических буев и спуска последних на воду по курсу движения судна. Первое судно может нести бортовой комплекс аппаратуры для приема сигналов глобальной навигационной системы, а также передачи данных и команд на сейсмические буи и второе судно. Кроме того, первое судно имеет средство для записи сигнала с сейсмической косы.
Второе судно предназначено для подъема сейсмических буев из воды после выполнения ими программы записи сейсмических сигналов. Второе судно может нести бортовой комплекс аппаратуры для приема и передачи данных и команд на сейсмические буи.
По крайней мере, один сейсмический буй включает в себя первый корпус, поплавок, закрепленный на первом корпусе, и второй корпус, подвешенный к первому корпусу на кабеле заданной длины.
В первом корпусе сейсмического буя размещен, по крайней мере, один первый сейсмический датчик, а во втором корпусе размещен, по крайней мере, один второй сейсмический датчик. В качестве первого и второго сейсмических датчиков могут быть использованы геофон, гидрофон и их комбинации.
По крайней мере, один сейсмический буй имеет средство для записи сигналов, поступающих от первых и вторых датчиков. Для записи точных координат и времени сейсмический буй имеет приемник глобальной навигационной системы. Приемник глобальной навигационной системы может работать как с системой GPS, так и с системой ГЛОНАСС.
Для приема команд от первого и второго судов, а также для передачи информации сейсмический буй может быть оборудован приемопередатчиком.
Для управления модулями, такими как средство для записи сигналов, приемопередатчик и приемник глобальной навигационной системы, сейсмический буй имеет контроллер, расположенный в первом корпусе.
Способ сбора сейсмических данных заключается в том, что программируют сейсмический буй, имеющий, по крайней мере, один датчик, расположенный в первом корпусе буя, и, по крайней мере, один датчик, расположенный во втором корпусе буя, подвешенном кабелем заданной длины на первом корпусе, на запись сигналов с определенным интервалом.
Первым судном с источником возбуждения сейсмических сигналов буксируют сейсмическую косу и с заданным интервалом с первого судна спускают на воду обладающие положительной плавучестью сейсмические буи.
Источником возбуждения сейсмических сигналов с заданным интервалом осуществляют сейсмическое воздействие и записывают сигналы отраженных и преломленных волн на небольших удалениях (до 6-8 км), полученные сейсмической косой, а также сигналы отраженных и преломленных волн, полученные первым и вторым датчиками сейсмических буев на сверхбольших удалениях (до 200 км). Одновременно с этим записывают соответствующие координаты и точное время UTC.
Координаты и точное время определяют при помощи системы глобального позиционирования. Сигналы отраженных волн, полученные сейсмической косой, записывают в средство записи, расположенное на первом судне, а сигналы отраженных и преломленных волн, полученные первым и вторым датчиками сейсмических буев, записывают в средство записи, расположенное на буе.
Применение сейсмических буев совместно с проведением работ с плавающими косами, позволяет, при относительно небольшом увеличении стоимости работ, более полно использовать оборудование сейсмического судна и получать дополнительные данные о строении осадочного чехла и земной коры, которые при работе только с плавающей косой оказываются недоступными.
Данные, записанные с помощью сейсмических буев на удалениях источник-приемник, достигающих до 200 км, позволяют построить с помощью волнового моделирования геолого-геофизический разрез глубинностью до 40-45 км, в то время как глубинность работ с сейсмическими косами в лучшем случае составляет порядка 10-15 км. Столь значительное увеличение глубины исследований позволяет учитывать глобальные региональные геологические процессы на этапах интерпретации данных и бассейнового моделирования.
Процедуры сейсмотомографической обработки данных преломленных волн с сейсмических буев, такие как томография волн первых вступлений, а также совместное послойное восстановление скоростной модели геологической среды, дают возможность получить закон распределения скоростей в осадочном чехле и земной коре. Миграция сейсмических данных отраженных волн во временной или глубинной области с полученными скоростями позволяет значительно улучшить качество данных отраженных волн, полученных при проведении сейсмических работ с помощью плавающих кос (классический вариант морской сейсморазведки).
Для лучшего понимания сути предлагаемого технического решения ниже приводится описание конкретного примера выполнения изобретения, не являющееся ограничительным примером практической реализации способа и системы для сбора сейсмических данных со ссылками на чертежи, на которых представлено следующее:
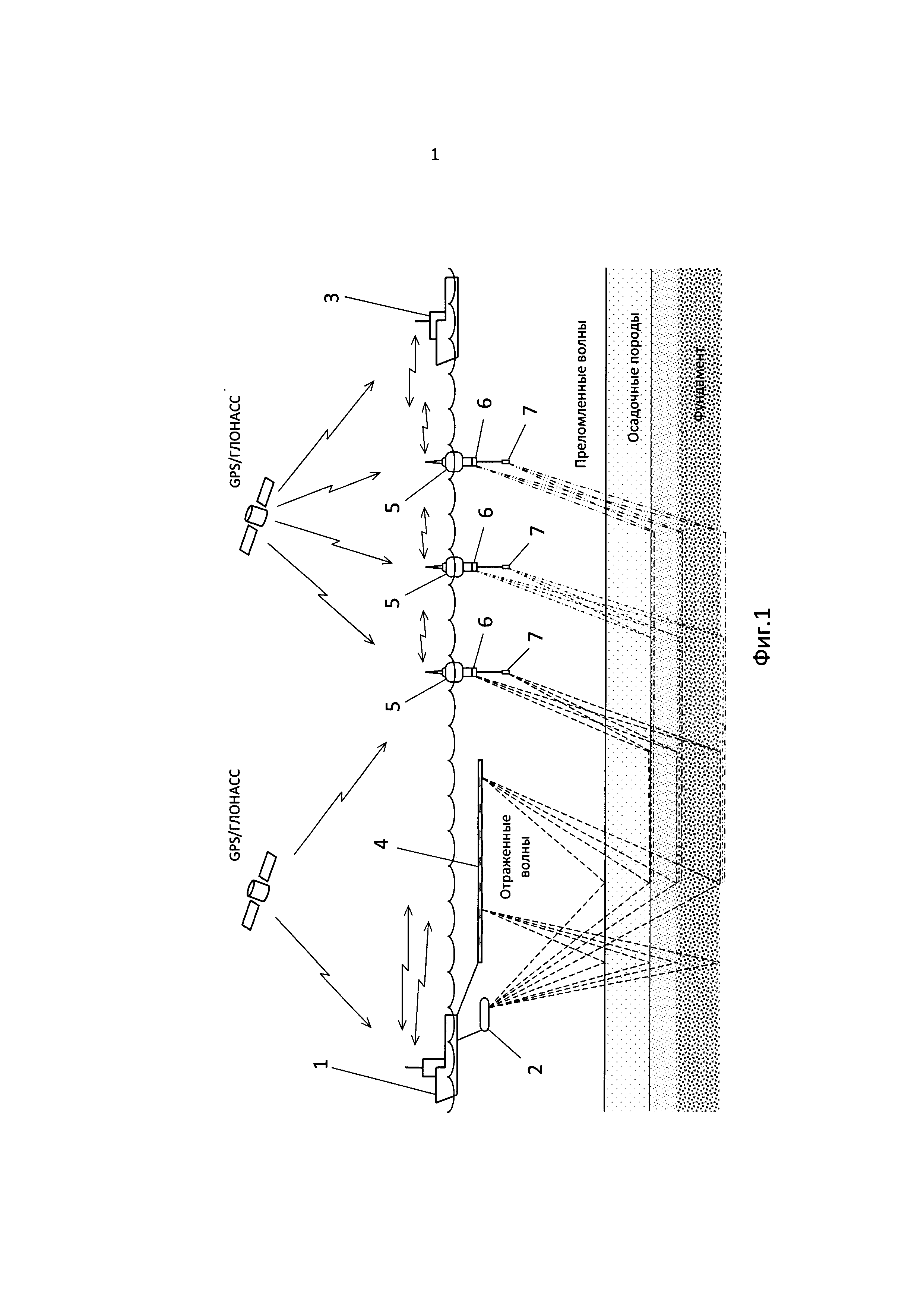
На фиг. 1 изображен общий вид системы сбора сейсмических данных.
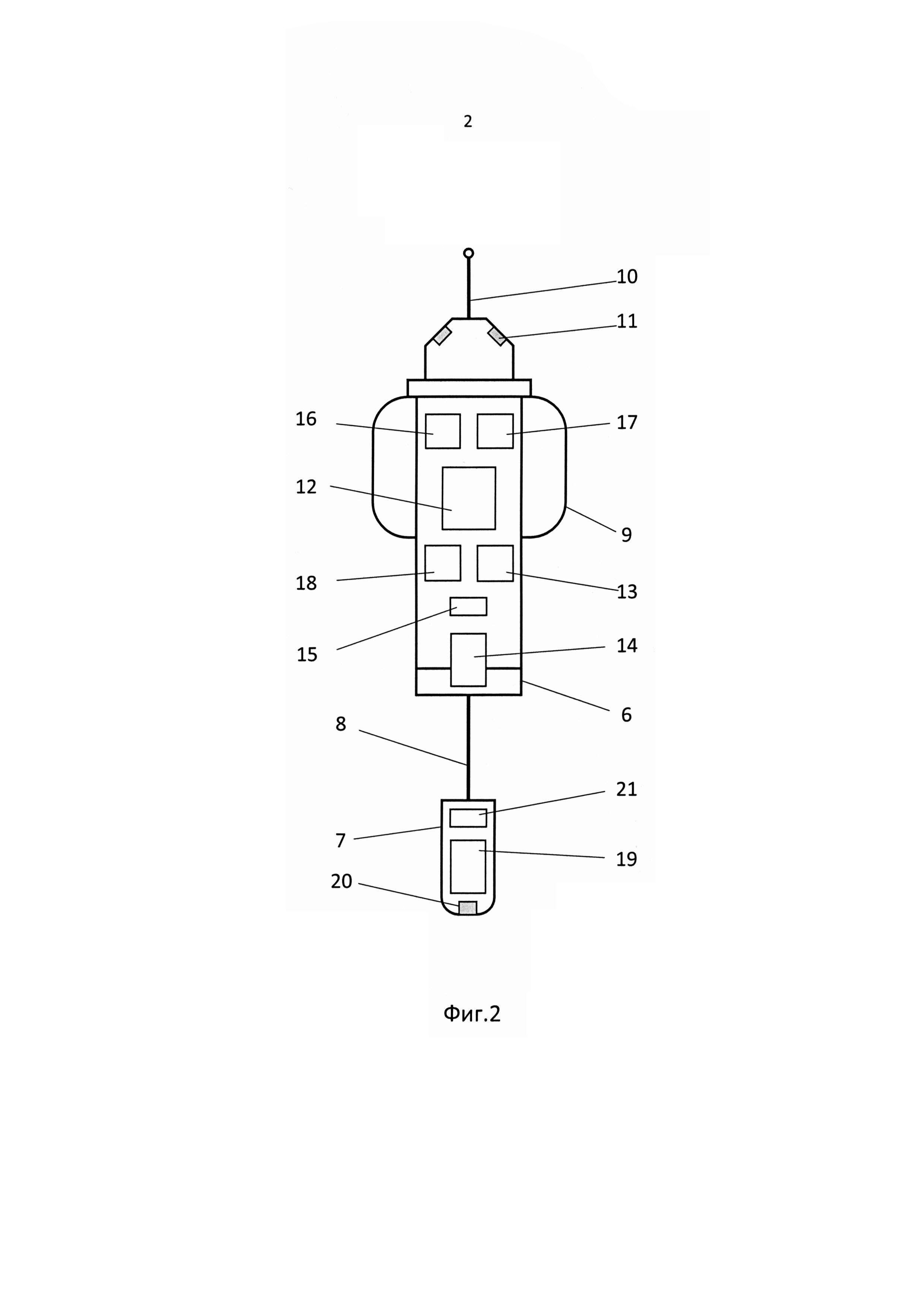
На фиг. 2 изображена конструктивная схема буя.
Система сбора геофизических данных включает в себя первое судно 1 с источником 2 возбуждения сейсмических сигналов и второе судно 3. Первое судно 1 буксирует сейсмическую косу 4 и несет на себе сейсмические буи 5, которые спускаются на воду по курсу его движения.
Второе судно 3 предназначено для нахождения, сбора и подъема сейсмических буев 5 из воды после выполнения ими программы записи сейсмических сигналов.
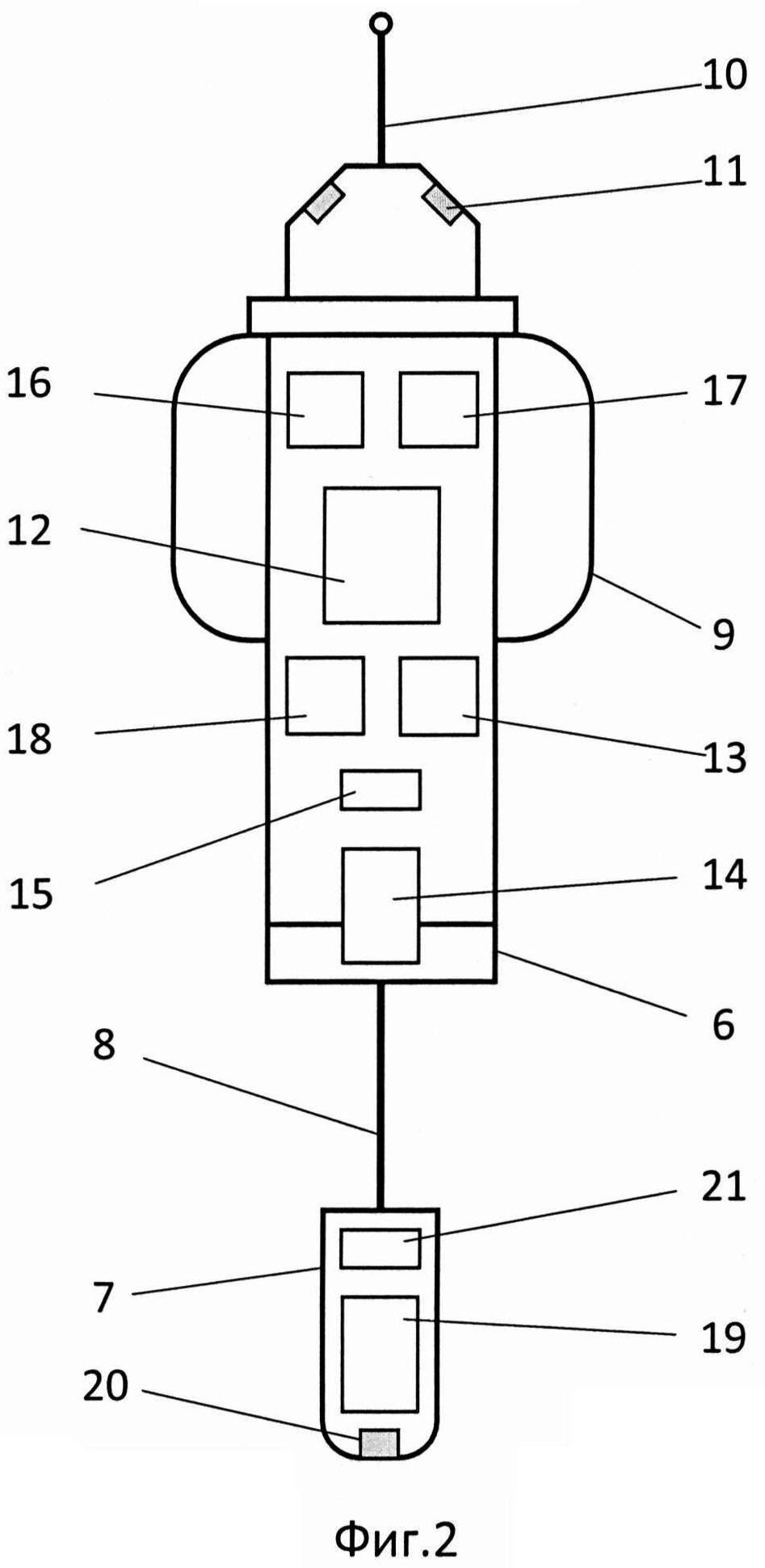
Сейсмический буй 5 включает в себя первый корпус 6 и второй корпус 7, соединенный с первым корпусом 6 кабелем 8. Для обеспечения положительно плавучести буя 5 на корпусе 6 закреплен поплавок 9. В верхней части корпуса 6 установлена антенна 10 и световые маяки 11.
Внутри корпуса 6 расположены контроллер 12, управляющий работой остальных элементов буя, и энергонезависимая память 13, служащая для записи настроек и сейсмических данных, и первый сейсмический датчик 14 с модулем 15 обработки сигнала.
Кроме того, в корпусе 6 расположены приемопередатчик 16, обеспечивающий по командам контроллера 12, благодаря антенне 10, связь с внешним передатчиком, например, расположенным на втором судне 3, и приемник 17 глобальной навигационной системы GPS/ГЛОНАСС, обеспечивающий при поступлении от спутников данных о точном времени и координатах буя.
Питание электронных модулей сейсмического буя обеспечивает аккумулятор 18, также расположенный в корпусе 6.
В конкретном случае выполнения изобретения первый сейсмический датчик 14 представляет собой геофон, преобразующий амплитуды сейсмического сигнала, достигшего чувствительного элемента датчика, в электрический ток соответствующего напряжения. Электрический сигнал с выхода геофона поступает на модуль 15 обработки сигнала.
Датчик 14, расположенный в корпусе 6 буя и подключенный в электрическую схему как акселерометр, регистрирует колебательные ускорения частиц среды. За счет его нахождения в приповерхностных слоях воды спектр регистрируемого сигнала расширяется в сторону высоких частот, увеличивая разрешающую способность метода, за счет меньшей длины волны.
В модуле 15 обработки сигнала осуществляется предварительное усиление и преобразование значений напряжения электрического тока в цифровую форму. После данного преобразования сейсмические данные в цифровой форме записываются под управлением контроллера 12 в память 13.
Во втором корпусе 7 расположены два вторых датчика, один из которых датчик 19 является геофоном, а другой 20 - гидрофоном. Модуль 21 обработки сигнала осуществляет предварительное усиление и оцифровку сигналов с датчиков 19 и 20, после чего сейсмические данные в цифровой форме также записываются в память 13.
Расположение датчиков 19 и 20 во втором корпусе 7, заглубленном на кабеле 8 относительно первого корпуса 6, позволяет исключить влияние приповерхностных шумов окружающей среды (ветер, дождь, волнения верхнего водного слоя, приповерхностных течений и т.д.). Чем больше заглубление датчика, тем выше соотношение полезного сигнала к уровню помех и меньше влияние погодных условий на проведение работ. Также при увеличении глубины расширяется частотный спектр сейсмического сигнала в сторону крайне низких частот и тем самым увеличивается итоговая глубина проникновения сейсмического сигнала и общая глубинность работ.
Применение нескольких сейсмических датчиков позволяет проводить дополнительные операции при последующей математической обработке полезной записи, улучшающие соотношение сигнал/шум и позволяющие повысить общее качество данных.
Нижняя сборка сейсмических датчиков данного устройства, состоящая из близко расположенных друг к другу геофона 19 и гидрофона 20, позволяет производить синхронный прием колебаний вертикальным геофоном (Z) и гидрофоном (Р). Геофон измеряет колебательную скорость частиц среды, а гидрофон - изменение давления в водном слое, созданное колебаниями этих частиц. При этом колебания скорости частиц среды опережают изменение давления среды на π/2. Благодаря данному фазовому сдвигу и различию характеристик направленности компонент датчика, возможно применение операции PZ-суммирования, которая направлена на подавление интерференции волн-помех в ближней зоне и соответственно улучшение качества сейсмических данных.
Запись сейсмических данных с помощью приемников колебаний, заглубленных на разную глубину (верхний геофон и нижняя сборка датчиков геофон и гидрофон), позволяет применять технологию подавления волн-спутников, что также положительно сказывается на качестве данных при минимальном удорожании единицы информации.
Реализация заявленного способа будет показана на примере работы системы сбора сейсмических данных. Как показано на фиг. 1, в начале работ буй 5, предварительно запрограммированный на сбор сейсмических данных с требуемыми параметрами, с заряженным аккумулятором, сбрасывается с борта сейсмического судна 1, проводящего работы с плавающими косами 4, на акваторию, где проводятся исследования. С шагом, определяемым геологическим заданием или проектом на работы, последовательно сбрасываются другие буи.
С заданными интервалами с судна 1 пневматическим источником возбуждения сейсмических сигналов 2 осуществляется сейсмическое воздействие и производится запись в память на первом судне 1 сейсмических данных, полученных сейсмической косой 4. Данные представляют собой отраженные волны.
В то же время в процессе работ буй свободно дрейфует от места сброса, принимая с помощью датчиков (геофонов и гидрофона) и записывая на внутреннюю память сейсмические данные. Данные представляют собой запись отраженных и преломленных структурными элементами земной коры сейсмических волн, порожденных пневматическим источником сигнала первого судна 1.
Благодаря встроенному GPS/ГЛОНАСС приемнику, полученные данные синхронизируются с точным временем. Также с требуемой периодичностью определяются и сохраняются вместе с записываемыми сейсмическими данными координаты буя. Данные регистрируются с требуемыми для конкретной задачи и задаваемыми перед началом работ параметрами сбора данных (частота дискретизации, коэффициенты усиления, задержка начала сбора данных после сброса буя).
В процессе работы между буем 5 и вторым судном 3 происходит обмен информацией в режиме, не мешающем сбору сейсмических данных. Обмен осуществляется благодаря наличию приемопередатчика 16 и антенны 10 на буе 5 и бортового оборудования комплекса для работы с буями, включающего радиомодем, на втором судне 3. На судно 3 передается информация о координатах буя, состоянии памяти (нормальном протекании процесса записи данных) и состоянии аккумулятора (напряжение на элементах питания).
После удаления первого судна 1 с источником возбуждения сейсмических сигналов на требуемое расстояние от первого сброшенного буя осуществляется его поиск вторым судном 3 с помощью данных о местоположении, получаемых по радиоканалу.
Для обнаружения буя в темное время суток и при плохой видимости используются световые маяки 11, включаемые по радиоканалу.
Далее буй 5 поднимается на борт второго судна 3, где к нему подключают внешний компьютер и считывают сейсмические данные с памяти 13. Считанные со всех буев и сейсмической косы данные в дальнейшем подвергают математической обработке для:
- избавления от присутствующих на записи волн помех (включая операции расширения частотного спектра записи с помощью использования наборов данных, зарегистрированных с различными заглублениями приемников, а также PZ-суммирование для подавления волн спутников. Использование данных алгоритмов улучшения сейсмической записи на этапе обработки сейсмических данных возможно только благодаря конструктивным особенностям сейсмического буя, а именно наличию датчиков, расположенных в разных корпусах);
- построения высокоточной скоростной модели среды с возможностью ее использования на этапе миграции до суммирования отраженных волн, полученных с помощью плавающей сейсмической косы классической методикой проведения морских работ МОВ-ОГТ;
- построения глубинной сейсмогеологической модели среды с расчленением земной коры и выявлением границы Мохо.