Результат интеллектуальной деятельности: ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретение относится к области робототехники и может быть использовано как в манипуляторах конструктора «Лего», так и в промышленных манипуляторах, где необходим шарнир упрощенной конструкции для поворота выходного звена с объектом управления по двум или трем координатам.
Известен шарнир манипулятора с поворотом выходного звена по двум координатам, выполненный на основе зубчатого дифференциала с коническим зацеплением (патент US 3386694 от 04.06.1968) и применение такого шарнира как основа механизма с управлением по трем координатам (патент US 4762016 от 09.08.1988 по классу B25J 18/00).
Недостатком данных шарниров является сложность конструкции и ограниченные углы поворота последующего звена относительно предыдущего.
Наиболее близким аналогом по технической сущности являются шарниры манипуляторов, в которых конструкция с управлением по двум координатам является составной частью конструкции с управлением по трем координатам и при этом для упрощения сборки шарнира звенья собираются из двух половин (Патент RU 2284896 от 21.02.2005, класс B25J 17/00) [1].
Недостатком этих шарниров является сложность элементов конструкции и сборки механизмов.
Цель изобретения - сокращение стоимости изготовления, упрощение конструкции и процесса сборки шарнира, доступной для применения в конструкторах «Лего».
Поставленная цель достигается тем, что в известном шарнире манипулятора, содержащем два ведущих звена и одно ведомое, которые расположены так, что оси ведущих и ведомого звеньев пересекаются в центре шарнира, согласно заявляемому изобретению ведомое звено выполнено в форме вала, на одном конце которого имеется элемент крепления к подвижному звену манипулятора, а на втором конце закреплено коническое зубчатое колесо, при этом вал ведомого звена размещен в отверстии цилиндрической втулки перпендикулярно ее продольной оси, вдоль этой продольной оси на цилиндрической втулке с одной стороны имеется выступ-ось, а с противоположной - отверстие, сама цилиндрическая втулка размещена в четырехугольной рамке с отверстием в центре каждой грани, в одно из которых вставлена выступ-ось цилиндрической втулки, а в отверстие с противоположной грани - ось с конической зубчатой шестерней, образующей с коническим колесом зубчатое зацепление, при этом выступ-ось цилиндрической втулки и ось с конической зубчатой шестерней являются ведущими звеньями и соединены с валами роторов двигателей, корпуса которых с помощью штифтов крепятся к соответствующим граням четырехугольной рамки, две оставшиеся грани четырехугольной рамки имеют элементы крепления к неподвижному корпусу манипулятора для шарнира с двумя ведущими звеньями.
В известном шарнире манипулятора, содержащем три ведущих звена и одно ведомое, которые расположены так, что оси ведущих и ведомого звеньев пересекаются в центре шарнира, отличающийся тем, что, согласно заявляемому изобретению, ведомое звено выполнено в форме вала, на одном конце которого имеется элемент крепления к подвижному звену манипулятора, а на втором конце закреплено коническое зубчатое колесо, при этом ведомое звено размещено в отверстии цилиндрической втулки перпендикулярно ее продольной оси, вдоль этой продольной оси на цилиндрической втулке с одной стороны имеется выступ-ось, а с противоположной - отверстие, сама цилиндрическая втулка размещена в четырехугольной рамке с отверстием в центре каждой грани, в одно из которых вставлена выступ-ось цилиндрической втулки, а в отверстие с противоположной грани - ось с конической зубчатой шестерней, образующей с коническим колесом зубчатое зацепление, при этом выступ-ось цилиндрической втулки и ось с конической зубчатой шестерней являются ведущими звеньями и соединены с валами роторов двигателей, корпуса которых с помощью штифтов крепятся к соответствующим граням четырехугольной рамки, в центральные отверстия двух оставшихся граней четырехугольной рамки вставлены оси без возможности вращения относительно граней четырехугольной рамки, противоположные концы этих осей размещаются в отверстия П-образной рамки с возможностью вращения в них, при этом одна из осей является третьим ведущим звеном и жестко соединена с ротором двигателя, корпус которого закреплен штифтами к боковой грани П-образной рамки, а основание П-образной рамки имеет элементы крепления к неподвижному корпусу манипулятора.
Шарнир манипулятора отличается от наиболее близкого аналога тем, что собран, в основном, из элементов, имеющих простые формы, легко реализуемых элементами конструктора Лего, благодаря чему он прост в сборке и дешев.
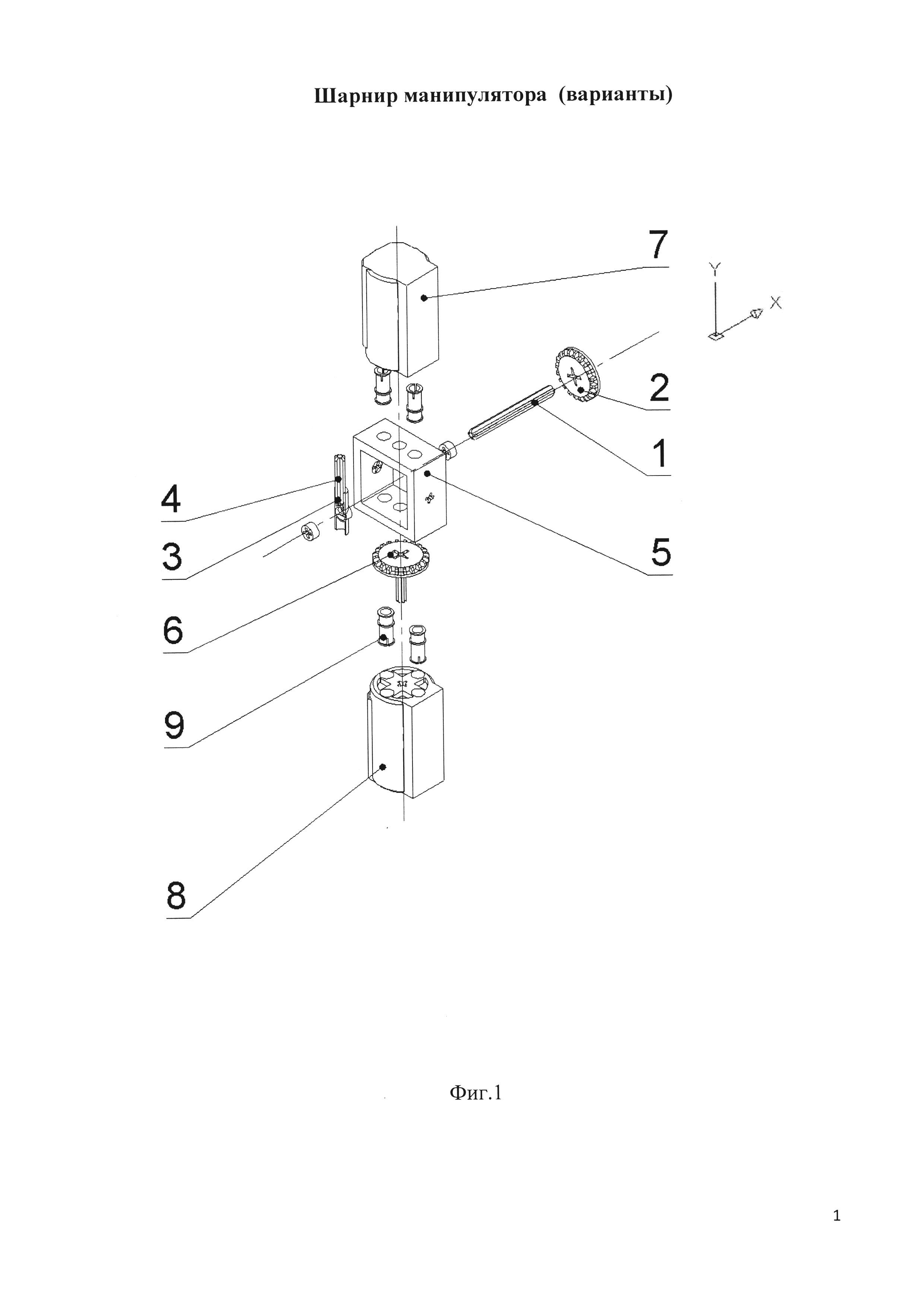
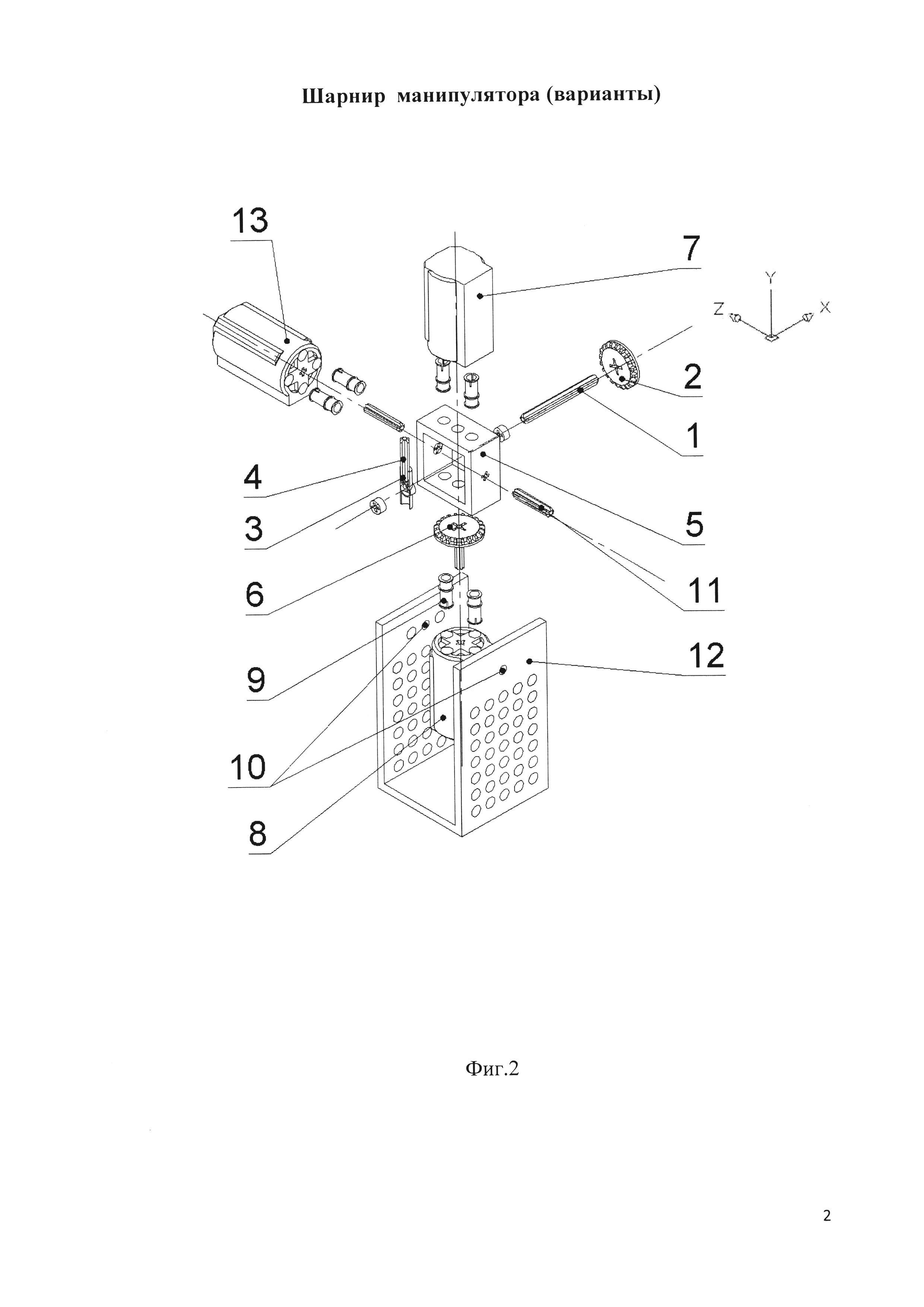
На фиг.1 представлен общий вид двухстепенного шарнира. На фиг.2 представлен общий вид трехстепенного шарнира.
Шарнир манипулятора, содержащий два ведущих звена и одно ведомое, которые расположены так, что оси ведущих и ведомого звеньев пересекаются в центре шарнира отличается тем, что ведомое звено выполнено в форме вала (1), на одном конце которого имеется элемент крепления к подвижному звену манипулятора, а на втором конце закреплено коническое зубчатое колесо (2), при этом ведомое звено размещено в отверстии цилиндрической втулки (3) перпендикулярно ее продольной оси, вдоль этой продольной оси на цилиндрической втулке с одной стороны имеется выступ-ось (4), а с противоположной - отверстие, сама цилиндрическая втулка размещена в четырехугольной рамке (5) с отверстием в центре каждой грани, в одно из которых вставлена выступ-ось (4) цилиндрической втулки, а в отверстие с противоположной грани - ось с конической зубчатой шестерней (6), образующей с коническим колесом (2) зубчатое зацепление, при этом выступ-ось (4) цилиндрической втулки и ось с конической зубчатой шестерней (6) являются ведущими звеньями и соединены с валами роторов двигателей (7), (8) соответственно, корпуса которых с помощью штифтов (9) крепятся к соответствующим граням четырехугольной рамки, две оставшиеся грани четырехугольной рамки имеют элементы крепления к неподвижному корпусу манипулятора.
Шарнир манипулятора, содержащий три ведущих звена и одно ведомое, которые расположены так, что оси ведущих и ведомого звеньев пересекаются в центре шарнира, отличающийся тем, что ведомое звено выполнено в форме вала (1), на одном конце которого имеется элемент крепления к подвижному звену манипулятора, а на втором конце закреплено коническое зубчатое колесо (2), при этом ведомое звено размещено в отверстии цилиндрической втулки (3) перпендикулярно ее продольной оси, вдоль этой продольной оси на цилиндрической втулке с одной стороны имеется выступ-ось (4), а с противоположной - отверстие, сама цилиндрическая втулка размещена в четырехугольной рамке (5) с отверстием в центре каждой грани, в одно из которых вставлена выступ-ось (4) цилиндрической втулки, а в отверстие с противоположной грани - ось с конической зубчатой шестерней (6), образующей с коническим колесом (2) зубчатое зацепление, при этом выступ-ось (4) цилиндрической втулки и ось с конической зубчатой шестерней (6) являются ведущими звеньями и соединены с валами роторов двигателей (7), (8) соответственно, корпуса которых с помощью штифтов (9) крепятся к соответствующим граням четырехугольной рамки, в центральные отверстия (10) двух оставшихся граней четырехугольной рамки вставлены (11) без возможности вращения относительно граней четырехугольной рамки, противоположные концы этих осей размещаются в отверстия П-образной рамки (12) с возможностью вращения в них, при этом одна из осей является третьим ведущим звеном и жестко соединена с ротором двигателя (13), корпус которого закреплен штифтами к боковой грани П-образной рамки (12), а основание П-образной рамки имеет элементы крепления к неподвижному корпусу.
Шарнир манипулятора работает следующим образом: При подаче электрического сигнала на двигатель (8) и при вращении ведущего звена по часовой стрелке через коническую шестерню (6) и зубчатое колесо (2) приводится во вращение ведомое звено по оси х (1) против часовой стрелки.
При подаче электрического сигнала на двигатель (7) ведущее звено передает вращение цилиндрической втулке (3) через выступ-ось (4), тем самым регулируя положение ведомого звена (1) по оси у. Направление вращения выходного звена (1) по оси у совпадает с направлением вращения ведущего звена.
При подаче электрического сигнала на двигатель (13) ведущее звено вращает четырехугольную рамку (5), регулируя вращение ведомого звена (1) по оси z. Направление вращения выходного звена (1) по оси z совпадает с направлением вращения ведущего звена.
Установка для определения механических свойств гибких стержневых элементов
Привод резервированный самостопорящийся
Электромеханический привод поступательного действия
Электромеханический рулевой привод вращательного действия
Боковая ручка управления (варианты)
Силовой мини-привод электрогидравлический
Адаптивный способ и устройство принудительного сброса - катапультирования груза
Беговой тренажёр с системой виртуальной реальности и способ его работы
Система получения реалистичной модели местности для виртуального мира и способ ее работы

