СПОСОБ ОПЕРАТИВНОЙ ИДЕНТИФИКАЦИИ ЛЮДЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к областям автоматики, вычислительной техники и безопасности и может быть использовано в местах прохода большого количества людей (в аэропортах, на вокзалах, стадионах, в таможенных и пограничных пунктах пропуска и т.д.) для выявления и регистрации людей, допустивших или имеющих правонарушения и т.п., а также для оперативного информирования служб о данных персонах.
Широко известны способы и устройства контроля с помощью рамок фирм Garrett, Fischer, Tesoro и др., устанавливаемых в местах прохода людей и работающих, как правило, совместно с металлоискателями с целью своевременного обнаружения взрывных устройств с металлической начинкой массового поражения или выявления разыскиваемых злоумышленников, например с помощью стационарного металлодетектора Garrett АСЕ [Информационный портал Mail.ru Яндекс. Директ. xscan.ru; (с) «Неделя», 2014 г.], представляющего собой арочный досмотровый металлоискатель, содержащий напольную рамочную конструкцию для прохода людей.
Недостатками известных способов и устройств являются их использование в постоянном месте и невозможность при необходимости оперативно перенести их в другое место (из-за их массивности), а также относительно низкая их автоматизация без регистрации в базе данных выявленных неблагоприятных событий и связанных с ними субъектов с их характерными особенностями, а также в силу отсутствия на рамке специальной бестеневой подсветки - невозможность с их помощью осуществлять соответствующими службами полноценный контроль быстро проходящих людей (физионометрический и др.), как правило, в условиях недостаточного общего освещения, например, на вокзалах и других подобных местах. Отсутствие бестеневой подсветки не позволяет обеспечивать качество и высокую скорость распознавания лиц.
Наиболее близкой по технической сущности к заявляемому изобретению является «Система обеспечения безопасности аэропорта» [патент на полезную модель РФ №111939 по МПК G08B 21/00 от 03.08.2011 г.], в которой представлены способ и устройство, характеризующиеся использованием рамки для прохода людей (РПЛ, а в прототипе - рамки металлоискателя), камер видеонаблюдения, компьютера и средств связи, с помощью которых выявляют представляющие интерес ситуации (опасные и т.п.), регистрируют их в памяти компьютера и передают на пункт управления, откуда получают инструкции с перечнем мер безопасности, которые необходимо предпринять.
Недостатком известных способа и устройства является невозможность в них оперативного переноса РПЛ в заданное место, между тем в настоящее время в условиях террористических угроз появилась необходимость оперативно доставлять, разворачивать и активизировать РПЛ вместе с приданными ей средствами в произвольном месте, например, удобном по замыслу специальной службы. При этом РПЛ должна быть вариативной по геометрическим размерам, чтобы могла вписываться в тесном коридоре и т.п.
Прототип также не обеспечивает качественную визуализацию проходящих людей, т.к. не имеет средств бестеневой подсветки, а, главное, не ориентирован на анализ и идентификацию человеческих лиц. Кроме того, он недостаточно автоматизирован для решения сложной задачи распознавания образов, к которой относится задача идентификации людей в больших потоках. Для запоминания больших объемов данных требуется сервер, которого нет в прототипе, а также сетевой коммутатор.
Технический результат и цель изобретения состоят в обеспечении оперативной идентификации людей в заданном (произвольном заранее не известном) месте, например в месте (туда необходимо срочно доставить и активизировать там РПЛ со средствами автоматизации) пересечения потока, идущих обходным путем на самолет, для оперативного выявления и задержания по электронным образам или фотороботам или другим ориентировкам разыскиваемых людей, для идентификации персон на допуск к объекту, а также для первичного выявления нарушителей или первичного анализа по заданным критериям в случайных потоках людей, причем во всех случаях - с регистрацией получаемой информации и с обменом информацией со смежными подобными пунктами и с вышестоящим пунктом управления.
Указанные технический результат и цель достигаются тем, что в способе оперативной идентификации людей, характеризующемся использованием в пункте контроля потока людей рамки для прохода людей (РПЛ) и средств автоматизации в составе камер видеонаблюдения, ноутбука и модуля управления внешним интерфейсом (МУВИ), с помощью которых выявляют представляющую интерес информацию, регистрируют ее в памяти и передают на пункт управления, откуда получают инструкции с перечнем мер безопасности, которые необходимо предпринять, согласно изобретению используемая РПЛ представляет собой сборно-разборно-переносной комплект, который оперативно доставляют в произвольное заданное место, оперативно собирают на месте, используя возможности изменения геометрических размеров РПЛ, вместе с которой и указанными выше средствами автоматизации дополнительно на место доставляют плоские электрические панели бестеневой подсветки (ЭПБП), сетевой коммутатор, сервер, модуль беспроводной передачи данных (МБПД) и мобильный телефон с текущей ориентировкой, а также автономные средства электропитания аппаратуры, далее закрепляют на РПЛ по бокам ЭПБП, а сверху РПЛ - камеры видеонаблюдения, функционально соединяют все средства автоматизации, подают на них электропитание и обеспечивают упорядоченный проход людей через РПЛ, при этом их качественно освещают с помощью ЭПБП, осуществляют с помощью камер видеонаблюдения через сетевой коммутатор под управлением ноутбука видеозапись лица каждого проходящего через РПЛ человека в память сервера и отображают на экране ноутбука текущую динамику видеоряда для визуального сравнения контролером с фотороботом, кроме того, автоматически по программе ноутбука, оперирующей биометрическими характеристиками лица, видеозапись лица каждого человека преобразуют в текущий математический фотопрофиль, представляющий собой цифровой код фиксированной длины, соответствующий биометрическим характеристикам конкретного лица, который регистрируют в сервере и сравнивают с хранящимися в его памяти математическими фотопрофилями разыскиваемых лиц, при идентификации текущего математического фотопрофиля одному из разыскиваемых фотопрофилей автоматически с помощью МУВИ соответствующую информацию передают на пункт управления, а на экране ноутбука отображают для контролера соответствующее сообщение, при отказе средств видеонаблюдения и видеозаписи контролер осуществляет необходимую видеозапись с помощью мобильного телефона.
Указанные технический результат и цель достигаются также тем, что устройство оперативной идентификации людей, содержащее рамку для прохода людей (РПЛ), конструктивно представляющую собой портал, через который проходят люди и средства автоматизации в составе камер видеонаблюдения, ноутбука и модуля управления внешним интерфейсом (МУВИ), внешние выводы которого являются выводами устройства, дополнительно содержит электрические панели бестеневой подсветки (ЭПБП), сетевой коммутатор, сервер, модуль беспроводной передачи данных (МБПД) и мобильный телефон, а в качестве РПЛ используют сборно-разборно-переносной комплект, в разобранном виде размещенный в первой укладке в чехле для ручной переноски и содержащий следующие одинаковые номенклатурные детали - четыре стойки с шарнирными подпятниками внизу у каждой, четыре поперечины, два резьбовых стержня, восемь гаек, восемь болтов и восемь барашков, причем стержни, болты, гайки и барашки имеют одну и ту же резьбу, а в отверстия, распределенные по всей длине стоек и поперечин, входят болты и стержни, комплект позволяет собирать различные по высоте и ширине прямоугольные порталы, треугольные призмы и пирамиды, при этом ширину прохода РПЛ формируют резьбовыми стержнями, устанавливаемыми как верхние горизонтали, стягивающие боковые стойки в любом месте стержней, а высоту - углом наклона стоек, во второй укладке в чехле для ручной переноски размещают все указанные выше средства автоматизации, на собранную РПЛ внутри на каждой боковой стенке подвешивают ЭПБП с направлением освещения друг на друга, а сверху на резьбовой стержень - камеры видеонаблюдения, на полу сбоку от прохода устанавливают сервер, сетевой коммутатор, МБПД и МУВИ, а в руках у контролеров находятся ноутбук и мобильный телефон, причем выходы камер видеонаблюдения соединены с соответствующими входами сетевого коммутатора, первый, второй, третий и четвертый двунаправленные выводы которого соединены соответственно с двунаправленными выводами МБПД, сервера, МУВИ и ноутбука.
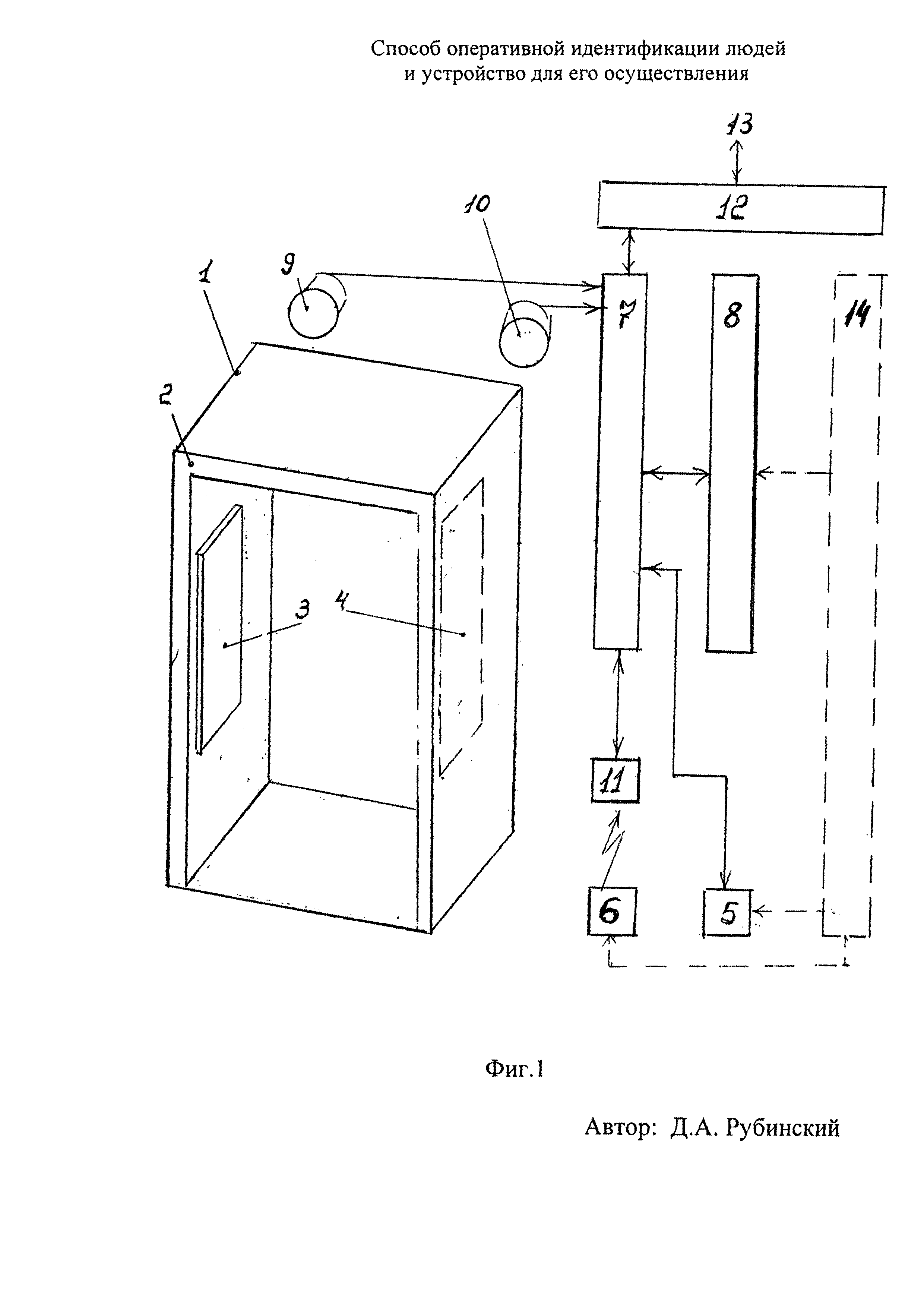
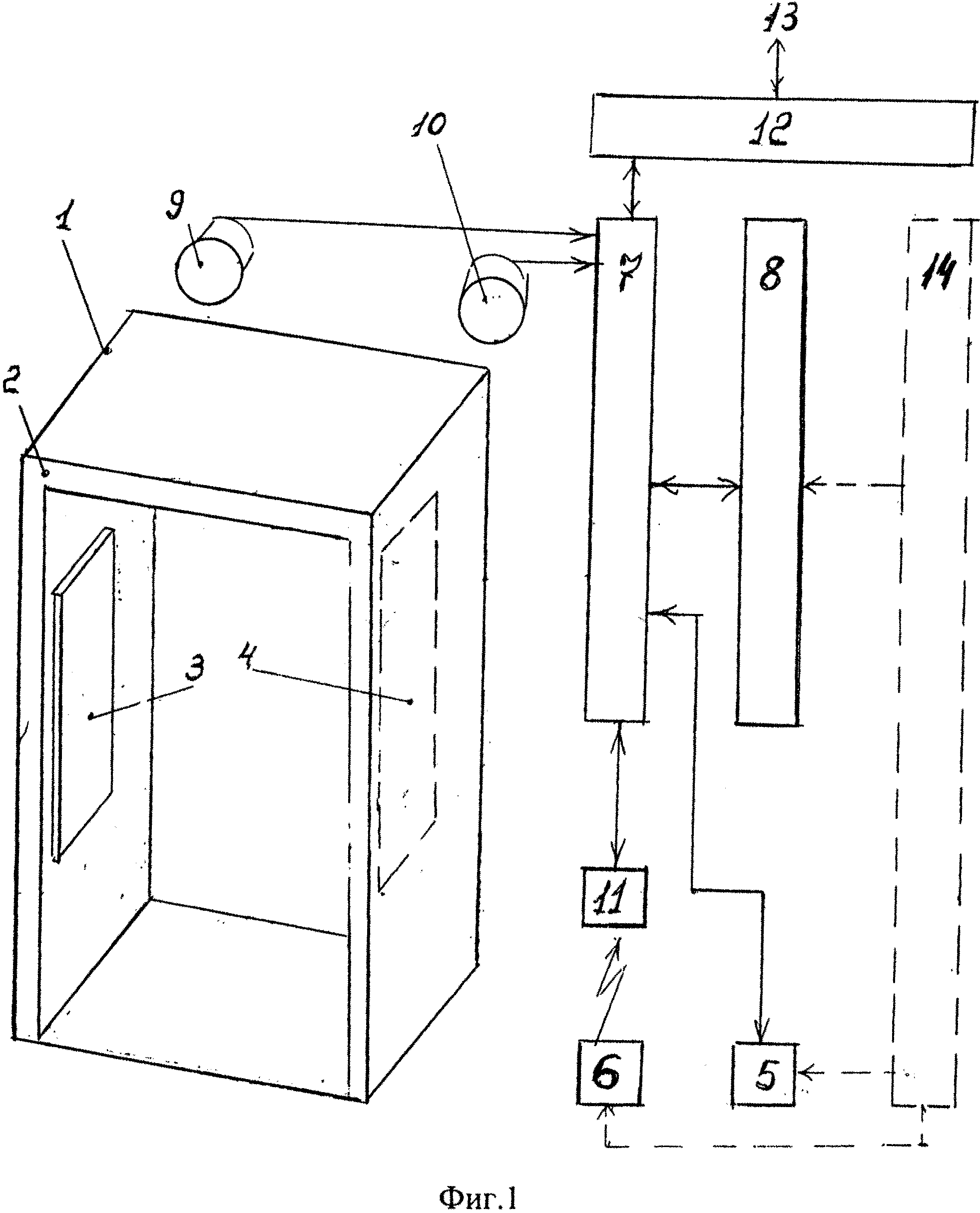
На фиг. 1 и 2 соответственно представлены структурная схема устройства и возможный вариант конструкции РПЛ, например, для случая когда устройство обслуживают два контроляра (оператора), один из которых работает с ноутбуком (первое автоматизированное рабочее место - АРМ), а второй подвижный находится непосредственно возле РПЛ с мобильным телефоном (второе АРМп).
Устройство содержит РПЛ 1, конструктивно представляющую собой портал 2, через который проходят люди, внутри которого на боковых стенках расположены электрические панели 3 и 4 бестеневой подсветки (ЭПБП) и средства автоматизации РПЛ - АРМ 5 оператора, АРМ переносной (АРМп) 6, сетевой коммутатор 7, сервер 8, камеры 9 и 10 видеонаблюдения, модуль беспроводной передачи данных (МБПД) 11, модуль 12 управления внешним интерфейсом (МУВИ) для связи со смежными пунктами контроля потоков людей и пунктом управления через выводы 13 устройства.
Используемое в устройстве программное обеспечение 14 выходит за рамки настоящего изобретения и показано на фиг. 1 пунктиром для пояснения.
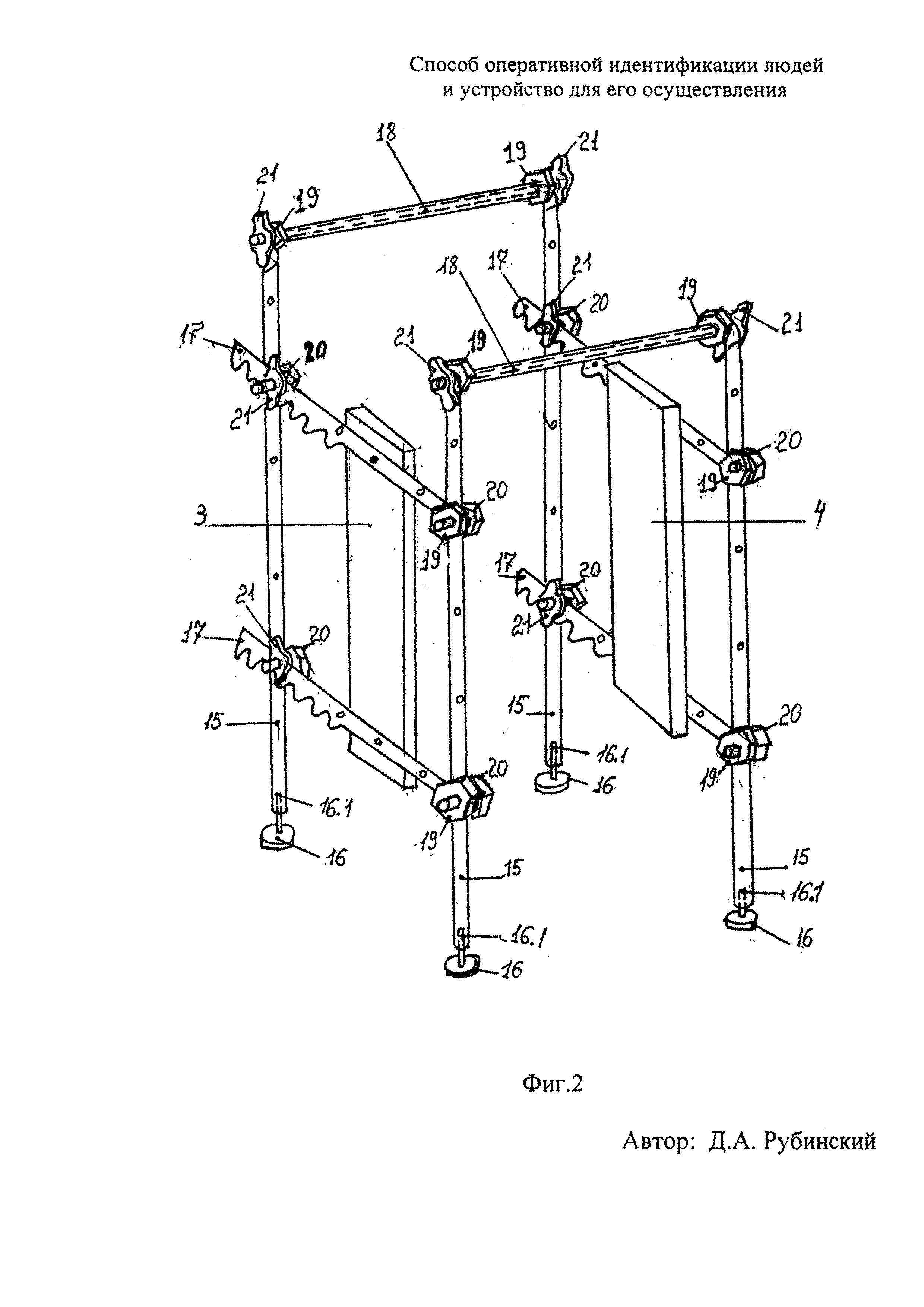
РПЛ 1, в свою очередь, содержит (Фиг. 2) семь повторяющихся номенклатурных деталей - четыре стойки 15 с шарнирными подпятниками 16 внизу у каждой с резьбовым регулятором 16.1, четыре поперечины 17, два резьбовых стержня 18, восемь гаек 19, восемь болтов 20 и восемь барашков 21.
Чтобы не затенять сути заявки на фиг. 1 и 2 не показаны такие несущественные признаки, как элементы и связи электропитания, второстепенные конструктивные элементы. Важнейшие ЭПБП 3 и 4 показаны и там, и там.
Выходы камер 9 и 10 видеонаблюдения соединены с соответствующими входами сетевого коммутатора 7, первый, второй, третий и четвертый двунаправленные выводы которого соединены соответственно с двунаправленными выводами МБПД 11, АРМ 5, сервера 8 и МУВИ 12, двунаправленный вывод 13 которого является выводом устройства.
В рассматриваемом примере в качестве АРМ 5 и АРМп 6 используют соответственно ноутбук и мобильный телефон, хотя в других случаях они могут представлять собой: первое - посадочное место со столом для первого оператора (контролера), на/в котором располагают ЭВМ в виде системного блока, связанного соответствующим образом с клавиатурой, манипулятором типа «мышь», видеомонитором, принтером и источником бесперебойного питания, а второе - планшет второго оператора (контролера), находящегося возле РПЛ 1.
Все используемые в системе элементы широко применяются в промышленности РФ, например, заявителем использованы:
в качестве ЭВМ в АРМ 5 - различные ноутбуки или персональные компьютеры семейства IBM-PC, не хуже Pentium-4 и 2 Гб;
в качестве АРМп 6 - мобильный телефон или планшетный компьютер Ipad 3;
в качестве РБП 1 - корпус рамки металлодетектора SmartScan;
в качестве световых панелей 3 и 4 - панели Briaton;
в качестве сетевого коммутатора 7 - Dlink 8р РОЕ;
в качестве камер 9 и 10 видеонаблюдения - Arecont Vision AV-3110,
объектив HS35SA 2/3 F 1,4;
в качестве сервера 8 - материнская плата Asus, процессор i7,2, видеокарты nVide Geforce.
Предлагаемый комплект РПЛ 1 состоит всего из семи номенклатурных деталей с высокой повторяемостью.
В качестве программного обеспечения устройства использовался комплекс программ для биометрической идентификации изображений разработки ООО «Мир систем и технологий».
Способ оперативной идентификации людей, характеризующийся использованием в пункте контроля потока людей рамки для прохода людей (РПЛ) 1 и средств автоматизации в составе камер 9 и 10 видеонаблюдения, ноутбука 5 и модуля 12 управления внешним интерфейсом (МУВИ), с помощью которых выявляют представляющую интерес информацию, регистрируют ее в памяти и передают на пункт управления, откуда получают инструкции с перечнем мер безопасности, которые необходимо предпринять, характеризуется также тем, что используемая РПЛ 1 представляет собой сборно-разборно-переносной комплект, который оперативно доставляют в произвольное заданное место, оперативно собирают на месте, используя возможности изменения геометрических размеров РПЛ 1, вместе с которой и указанными выше средствами автоматизации дополнительно на место доставляют плоские электрические панели 3 и 4 бестеневой подсветки (ЭПБП), сетевой коммутатор 7, сервер 8, модуль 11 беспроводной передачи данных (МБПД) и мобильный телефон 6 с текущей ориентировкой, а также автономные средства электропитания аппаратуры, далее закрепляют на РПЛ 1 по бокам ЭПБП 3 и 4, а сверху РПЛ 1 - камеры видеонаблюдения 9 и 10, функционально соединяют все средства автоматизации, подают на них электропитание и обеспечивают упорядоченный проход людей через РПЛ 1, при этом их качественно освещают с помощью ЭПБП 3 и 4, осуществляют с помощью камер 9 и 10 видеонаблюдения через сетевой коммутатор 7 под управлением ноутбука 5 видеозапись лица каждого проходящего через РПЛ 1 человека в память сервера 8 и отображают на экране ноутбука 5 текущую динамику видеоряда для визуального сравнения контролером с фотороботом, кроме того, автоматически по программе ноутбука 5, оперирующей биометрическими характеристиками лица, видеозапись лица каждого человека преобразуют в текущий математический фотопрофиль, представляющий собой цифровой код фиксированной длины, соответствующий биометрическим характеристикам конкретного лица, который регистрируют в сервере 8 и сравнивают с хранящимися в его памяти математическими фотопрофилями разыскиваемых лиц, при идентификации текущего математического фотопрофиля одному из разыскиваемых фотопрофилей автоматически с помощью МУВИ 12 соответствующую информацию передают на пункт управления, а на экране ноутбука 5 отображают для контролера соответствующее сообщение, при отказе средств видеонаблюдения и видеозаписи контролер осуществляет необходимую видеозапись с помощью мобильного телефона 6 и МБПД 11.
Устройство оперативной идентификации людей, содержащее рамку для прохода людей (РПЛ) 1, конструктивно представляющую собой портал 2, через который проходят люди и средства автоматизации в составе камер 9 10 видеонаблюдения, ноутбука 5 и модуля 12 управления внешним интерфейсом (МУВИ), внешние выводы 13 которого являются выводами устройства, дополнительно содержит электрические панели 3 и 4 бестеневой подсветки (ЭПБП), сетевой коммутатор 7, сервер 8, модуль 11 беспроводной передачи данных (МБПД) и мобильный телефон 6, а в качестве РПЛ 1 используют сборно-разборно-переносной комплект, в разобранном виде размещенный в первой укладке в чехле для ручной переноски и содержащий следующие повторяющиеся номенклатурные детали - четыре стойки 15 с шарнирными подпятниками 16 внизу у каждой с резьбовыми регуляторами 16.1, четыре поперечины 17, два резьбовых стержня 18, восемь гаек 19, восемь болтов 20 и восемь барашков 21, причем стержни 18, болты 20, гайки 19 и барашки 21 имеют одну и ту же резьбу, а в отверстия, распределенные по всей длине стоек 15 и поперечин 17, входят болты 20 и стержни 18, комплект позволяет собирать различные по высоте и ширине прямоугольные порталы 2, треугольные призмы и пирамиды, при этом ширину прохода РПЛ 1 формируют резьбовыми стержнями 18, устанавливаемыми как верхние горизонтали, стягивающие боковые стойки 15 в любом месте стержней 18, а высоту - углом наклона стоек 15, во второй укладке в чехле для ручной переноски размещают все указанные выше средства автоматизации, на собранную РПЛ 1 внутри на каждой боковой стенке подвешивают ЭПБП 3 и 4 с направлением освещения друг на друга, а сверху на резьбовой стержень 18 - камеры 9 и 10 видеонаблюдения, на полу сбоку от прохода устанавливают сервер 8, сетевой коммутатор 7, МБПД 11 и МУВИ 12, в руках у контролеров находятся ноутбук 5 и мобильный телефон 6, причем выходы камер 9 и 10 видеонаблюдения соединены с соответствующими входами сетевого коммутатора 7, первый, второй, третий и четвертый двунаправленные выводы которого соединены соответственно с двунаправленными выводами МБПД 11, сервера 8, МУВИ 12 и ноутбука 5.
Способ осуществляется следующим образом.
Пусть, например, устройство уже оперативно доставлено и установлено в заданном месте в аэропорту в обход обычно используемого прохода авиапассажиров (для отделения потока пассажиров с подозреваемым террористом от других авиапассажиров с целью их безопасности). Детали сборки устройства рассмотрены ниже в соответствующем разделе.
В ожидании потока авиапассажиров первый контроллер занимает место на несколько метров впереди после прохода РПЛ 1, делает на ноутбуке необходимые установки (загрузка, установка режима работы, проверка связи с абонентами) и осуществляет пуск устройства, а второй контролер с мобильным телефоном занимает место непосредственно возле РПЛ 1.
При появлении авиапассажиров первый контролер на экране ноутбука рассматривает лица проходящих людей, сравнивая их с фотороботом. То же самое делает и второй контролер, но рассматривая лица наяву. Параллельно с этим средства автоматизации осуществляют видеозапись информации, поступающей от камер 9 и 10 видеонаблюдения через сетевой коммутатор 7, в память сервера 8 (динамика видеоряда одновременно отображается на экране ноутбука 5 для первого контролера) и с помощью ноутбука преобразуют для каждого лица в математический фотопрофиль, который затем сравнивается с записанным в сервере математическим фотопрофилем разыскиваемой персоны.
При обнаружении совпадения проходящего через РПЛ 1 человека с фотороботом разыскиваемого любым из контролеров или идентификацией с помощью средств автоматизации об этом автоматически через МУВИ 12 и выход 13 по каналу связи сообщается на пункт управления, соответствующее сообщение отображается на экране ноутбука 5, в связи с чем специальные службы осуществляют задержание подозреваемого.
Ключевым аспектом заявляемого способа является высокая скорость поиска совпадений распознаваемых лиц с базой данных, что обеспечивает автоматизированная РПЛ 1, позволяющая получить значительно большее количество кадров в секунду с каждой камеры и, в конечном счете, охватить большой поток людей без остановки его перед камерами. Кроме того, анализ большого количества кадров (4-9 кадров на каждого человека, проходящего со скоростью 2,5-3,5 км/ч) позволяет повысить процент успешного выявления нарушителей. При этом обеспечивается высокая скорость обработки изображений (порядка 30 мс на 1000 лиц), поиска идентифицируемых изображений.
Устройство работает следующим образом.
Вторым важнейшим для заявленного изобретения ключевым аспектом является оперативная доставка в заданное место, сборка и активизация РПЛ 1, представляющей собой сборно-разборно-переносной комплект, в разобранном виде размещенный в первой укладке в чехле для ручной переноски и содержащий следующие повторяющиеся номенклатурные детали - четыре стойки 15 с шарнирными подпятниками 16 внизу у каждой с резьбовым регулятором 16.1, четыре поперечины 17, два резьбовых стержня 18, восемь гаек 19, восемь болтов 20 и восемь барашков 21.
Соберем из этого простого набора деталей РПЛ 1. Допустим заданное место позволяет использовать более просторную конструкцию - прямоугольный портал, максимальный по высоте и ширине.
Для этого возьмем из первой укладки две пары стоек 15 (фиг. 2) с заранее ввинченными в них резьбовыми регуляторами 16.1 подпятников 16, причем в каждой паре на одной стойке 15 заранее привинчены на разной высоте с помощью болтов 20 и гаек 19 две поперечины 17, а на другой - нет. С помощью двух болтов 20 и двух барашков 21 свинчиваем первую пару стоек 15, а затем аналогичным образом и вторую. Далее полученные две пары стоек 15 свинчиваем между собой с помощью двух резьбовых стержней 18, вставляемых в верхние отверстия стоек 15 одним концом в одну пару, а другим - в другую. При этом стержень с внутренней стороны стойки 15 на стержне стоит гайка 19, а с наружной - барашек 21. В завершение необходимо с помощью резьбовых регуляторов 16.1 шарнирных подпятников 16 добиться устойчивости всей конструкции.
Стержни 18, болты 20, гайки 19 и барашки 21 имеют одну и ту же резьбу и входят в отверстия, распределенные по всей длине стоек 15 и поперечен 17. Это позволяет собирать различные по высоте и ширине прямоугольные порталы, треугольные призмы и пирамиды, при этом ширину прохода РПЛ 1 формируют резьбовыми стержнями 18, устанавливаемыми как верхние горизонтали, стягивающие боковые стойки 15 в любом месте длины стержней 18. а высоту - углом наклона стоек 15.
Во второй укладке в чехле для ручной переноски размещают все указанные выше средства автоматизации. На собранную РПЛ 1 внутри на каждой боковой стенке подвешивают ЭПБП 3 и 4 с направлением освещения друг на друга, а сверху на резьбовой стержень 18 - камеры 9 и 10 видеонаблюдения, на полу сбоку от прохода устанавливают сервер 8, сетевой коммутатор 7, МБПД 11 и МУВИ 12.
Разборка и укладка устройства осуществляются в обратном порядке.
Работа устройства раскрыта выше при описании способа.
Необходимо лишь добавить, что указанные выше укладки весят каждая менее 5 кг, а сборка РПЛ 1 занимает порядка 2 минут.