Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНОЙ, ЗАПОМИНАЮЩАЯ СРЕДА И СИСТЕМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ
Вид РИД
Изобретение
Настоящее изобретение относится к способу и к устройству управления грузоподъемной машиной, к запоминающей среде и к системе грузоподъемной машины и, в особенности, к способу и к устройству управления грузоподъемной машиной с клетью, работающей в шахте, к запоминающей среде и к системе грузоподъемной машины, включающей в себя это устройство.
Во время загрузки и разгрузки грузоподъемной машины в шахте вибрационная платформа, принимающая это устройство, должна быть соединена с внутренним и внешним рельсами транспортного средства во избежание приложения ударной нагрузки непосредственно к клети и во избежание огромной величины относительного удлинения стального троса, вследствие огромной нагрузки. Когда тяжелая вагон-платформа (максимальная масса составляет, приблизительно, 39 тонн) въезжает в клеть или выезжает из нее, величина относительного удлинения стального троса является большой, и величина относительного удлинения является еще большей при подъеме в глубокой скважине, и в этом случае, когда оборудование въезжает в клеть или выезжает из нее, клеть подпрыгивает, становясь неустойчивой, а это вызывает то, что оборудование не способно легко, надежно или устойчиво въезжать в клеть и выезжать из нее.
В настоящее время обычно используемые поддерживающие устройства для внутреннего/внешнего присоединения клети включают в себя опорные машины и вибрационные платформы. Опорная машина требует, чтобы клеть имела отдельную подвижную опорную плиту, а это вызывает усложнение конструкции клети и ее большую массу, и, в то же самое время, время ее срабатывания является весьма большим, что увеличивает время цикла подъема. Когда клеть принимает вибрационная платформа, то клеть находится в подвешенном состоянии вследствие упругой деформации подъемного стального троса и воздействия на клеть, когда рудничная вагонетка въезжает в клеть/выезжает из нее, что вызывает подпрыгивание клети и ее раскачивание из стороны в сторону, и весьма вероятен сход рудничной вагонетки с рельсов. Оборудование вагонетки, являющееся согласованным с вибрационной платформой, обычно находится в состоянии с восходящим уклоном, требующим относительно большего толкающего усилия для вагонетки, и при прохождении восходящего/нисходящего уклона вибрационной платформы во время въезда в клеть/выезда из нее, весьма вероятно, что персонал может поскользнуться и упасть, что очень опасно.
В заявке на патент Китая № 200810150532.8, имеющей название "Cage stabilizing/cage locking device for shaft cage", раскрыто устройство, обеспечивающее устойчивость клети/стопорение клети, для шахтной клети, и в известного уровня технике также раскрыта трансформирующая платформа, способная вмещать и застопоривать клеть, причем эта трансформирующая платформа состоит из коромысла, обеспечивающего устойчивость клети, центрирующего устройства, амортизирующего гидроцилиндра и т.д., и принцип ее работы состоит в следующем: когда клеть находится в покое на дне шахты, на клеть помещают коромысло, обеспечивающее устойчивость клети, причем в этом коромысле, обеспечивающем устойчивость клети, имеется центрирующее устройство, выступающее в отверстие, предусмотренное в верхней части клети, и амортизирующий гидроцилиндр поддерживает центрирующее устройство и может динамически поглощать энергию, сгенерированную вследствие упругой деформации стального троса.
Можно заметить, что вышеупомянутое устройство, обеспечивающее устойчивость клети/стопорение клети, для шахтной клети и трансформирующая платформа являются весьма сложными по конструкции, и для эффективного управления подъемной машиной необходима громоздкая программа для подъема и спуска клети.
Целью настоящего изобретения является создание способа простого и прямого управления грузоподъемной машиной и соответствующего ему устройства, в котором после завершения операции загрузки/разгрузки на горизонте околоствольного двора грузоподъемной машиной можно управлять с возможностью высвобождения устройства стопорения клети простым способом и приведения ее в действие для перемещения на следующий горизонт околоствольного двора, являющийся местом назначения.
В настоящем изобретении предложен способ управления грузоподъемной машиной, при этом упомянутую грузоподъемную машину используют для подъема клети, работающей в шахте, а упомянутая клеть снабжена множеством ограничителей хода для стопорения, на основании стены упомянутой шахты размещено множество фиксаторов, причем упомянутые фиксаторы используются для сохранения положения упомянутой клети за счет перемещения в направлениях к упомянутой клети, приближаясь к ней, когда упомянутая клеть остановлена на месте, обеспечивая ее фиксацию выше и ниже упомянутых ограничителей хода для стопорения, и когда необходимо высвободить упомянутую клеть, упомянутые фиксаторы перемещают в направлениях от упомянутой клети для высвобождения упомянутой клети после того, как все они были отведены,
высвобождают упомянутую клеть, обнаруживают состояние отведения упомянутых фиксаторов и посылают сигнал "фиксатор отведен";
посылают сигнал шахтной сигнализации для координирующего перемещения, если упомянутым сигналом "фиксатор отведен" указано, что упомянутые фиксаторы, расположенные выше/ниже упомянутых ограничителей хода для стопорения, в одном направлении были отведены, но в другом направлении не все из них были отведены;
приводят в действие упомянутую грузоподъемную машину для вытягивания упомянутой клети для выполнения упомянутого координирующего перемещения после приема упомянутого сигнала шахтной сигнализации;
обнаруживают состояние отведения упомянутых фиксаторов при заданных условиях после выполнения упомянутого координирующего перемещения, и посылают сигнал обнаружения; и тянут упомянутую клеть упомянутой грузоподъемной машиной так, чтобы она пришла непосредственно в место назначения, если упомянутым сигналом обнаружения указано, что все упомянутые фиксаторы были отведены при заданных условиях.
Можно заметить, что оператору грузоподъемной машины необходимо приводить грузоподъемную машину в действие только один раз, и грузоподъемная машина может автоматически завершать необходимое координирующее перемещение и выполнять обычное перемещение в место ее назначения за счет высвобождения и торможения за один раз, что значительно повышает эффективность эксплуатации грузоподъемной машины, имеющей хороший контроль обеспечения безопасности для системы стопорения клети для предотвращения ошибок при работе, допускаемых человеком, имеющей довольно высокую характеристику безопасности, и одновременно с этим уменьшающей износ тормозов в ней.
В качестве одного из вариантов осуществления изобретения, если упомянутым сигналом "фиксатор отведен" указано, что все же имеются фиксаторы, которые не были успешно отведены, расположенные как выше, так и ниже ограничителей хода для стопорения, то упомянутую грузоподъемную машину блокируют. Если все же существуют не отведенные фиксаторы, расположенные как выше, так и ниже ограничителей хода для стопорения, то это, вероятно, означает, что произошло несрабатывание во время отведения фиксаторов, а блокирование грузоподъемной машины в этот момент способствует предотвращению несчастных случаев.
В качестве одного из вариантов осуществления изобретения, если упомянутым сигналом "фиксатор отведен" указано, что все фиксаторы, расположенные выше и ниже ограничителей хода для стопорения, были отведены, то посылают сигнал шахтной сигнализации для обычного перемещения, и после приема упомянутого сигнала шахтной сигнализации упомянутая грузоподъемная машина тянет упомянутую клеть, перемещая ее непосредственно в место назначения. Если все фиксаторы, расположенные выше и ниже ограничителей хода для стопорения, были отведены, то это указывает отсутствие каких-либо препятствий как выше, так и ниже клети, и подъем и спуск может быть выполнен согласно команде.
В качестве одного из вариантов осуществления изобретения, если упомянутым сигналом "фиксатор отведен" указано, что все фиксаторы, расположенные выше ограничителей хода для стопорения, были отведены, но не были отведены все фиксаторы, расположенные ниже их, то упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вверх; или
если упомянутым сигналом "фиксатор отведен" указано, что все фиксаторы, расположенные ниже ограничителей хода для стопорения, были отведены, но не были отведены все фиксаторы, расположенные выше них, то упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вниз.
Во время подъема или спуска клети грузоподъемной машиной необходимо взаимодействие между оператором шахты и оператором грузоподъемной машины, в вариантах осуществления настоящего изобретения в том случае, если оператор шахты желает, чтобы клеть дошла до места назначения, необходимо всего лишь выполнить эту же самую операцию еще раз, не посылая сигнал для координирующего перемещения, то есть оператор шахты может послать обычную команду "пуск" оператору грузоподъемной машины всего лишь один раз, не учитывая, в каком состоянии находятся фиксаторы. Аналогичным образом, оператору грузоподъемной машины также необходимо привести грузоподъемную машину в действие всего лишь один раз, то есть осуществить управление клетью для перемещения в место назначения, и грузоподъемная машина может автоматически завершить необходимое координирующее перемещение, выполняя высвобождение и торможение за один раз, и выполнить обычное перемещение в ее место назначения. Отсутствует необходимость в том, чтобы оператор шахты посылал команду оператору грузоподъемной машины два раза, и также отсутствует необходимость в том, чтобы оператор грузоподъемной машины приводил ее в действие два раза, и отсутствует необходимость в высвобождении и торможении грузоподъемной машины два раза, то есть перемещение не выполняют дважды. По существу, эффективность эксплуатации грузоподъемной машины может быть значительно повышена, система стопорения клети имеет полный контроль обеспечения безопасности для предотвращения ошибок при работе, допускаемых человеком, имеет место довольно высокая характеристика безопасности, и в то же самое время уменьшен износ тормозов в ней, и грузоподъемная машина может автоматически высвобождать устройство стопорения клети после завершения загрузки/разгрузки на горизонте околоствольного двора, и может быть автоматически приведена в действие для перемещения на следующий горизонт околоствольного двора, являющийся местом назначения.
В качестве одного из вариантов осуществления изобретения, условием полного отведения упомянутых фиксаторов при упомянутых заданных условиях является, в частности, следующее: расстояние после того, как упомянутой клетью было выполнено перемещение, не превышает заданное максимальное расстояние, и все упомянутые фиксаторы были отведены, или все упомянутые фиксаторы были отведены в течение заданного промежутка времени после того, как упомянутой клетью было пройдено упомянутое заданное максимальное расстояние.
При задании величины максимального расстояния, если максимальное расстояние является слишком большим, то существует вероятность того, что фиксаторы могут ударить по клети, при этом устанавливают заданный промежуток времени ожидания, в основном, для ожидания действия гидроцилиндров, то есть, для ожидания того, что фиксаторы будут отведены гидроцилиндрами на свое место.
В качестве одного из вариантов осуществления изобретения, когда упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вверх, максимальной скоростью во время упомянутого перемещения вверх является первая максимальная скорость, а максимальной скоростью во время последующего перемещения непосредственно к месту назначения является вторая максимальная скорость, при этом величина упомянутой первой максимальной скорости является меньшей, чем величина упомянутой второй максимальной скорости, и
когда упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вниз, максимальной скоростью во время упомянутого перемещения вниз является третья максимальная скорость, а максимальной скоростью во время последующего перемещения непосредственно в место назначения является четвертая максимальная скорость, при этом величина упомянутой третьей максимальной скорости является меньшей, чем величина упомянутой четвертой максимальной скорости.
В качестве одного из вариантов осуществления изобретения, упомянутые вторая максимальная скорость и четвертая максимальная скорость являются равными по величине, упомянутые первая максимальная скорость и третья максимальная скорость являются равными по величине.
Поскольку расстояние координирующего перемещения является относительно малым, то если клеть работает с относительно низкой скоростью, то может быть обеспечена устойчивость при работе, причем во время обычного перемещения может использоваться относительно высокая скорость для управления перемещением в заданное положение.
В качестве одного из вариантов осуществления изобретения, если не все упомянутые фиксаторы были отведены при упомянутых заданных условиях, то в упомянутой грузоподъемной машине выполняют рабочее торможение. Если не все упомянутые фиксаторы были отведены в пределах заданного максимального расстояния после того, как упомянутой клетью было совершено перемещение, или если не все упомянутые фиксаторы были отведены в течение заданного промежутка времени после того, как упомянутой клетью было пройдено упомянутое заданное максимальное расстояние, то это означает, что система стопорения клети не может обеспечить высвобождение, и что она должна выполнить рабочее торможение для обеспечения безопасности.
Также в настоящем изобретении предложено устройство управления грузоподъемной машиной, при этом упомянутая грузоподъемная машина используется для подъема клети, работающей в шахте, упомянутая клеть снабжена множеством ограничителей хода для стопорения, на основании стены упомянутой шахты размещено множество фиксаторов, причем упомянутые фиксаторы используются для сохранения положения упомянутой клети за счет перемещения в направлениях к упомянутой клети, приближаясь к ней, когда упомянутая клеть остановлена на месте, обеспечивая ее фиксацию выше и ниже упомянутых ограничителей хода для стопорения, и когда необходимо высвободить упомянутую клеть, упомянутые фиксаторы перемещают в направлениях от упомянутой клети для высвобождения упомянутой клети после того, как все они были отведены, и упомянутое устройство включает в себя:
блок обнаружения состояния фиксатора, предназначенный для обнаружения состояния отведения упомянутых фиксаторов при высвобождении упомянутой клети и для передачи сигнала "фиксатор отведен",
блок сигнала координирующего перемещения, предназначенный для анализа упомянутого сигнала "фиксатор отведен" после его приема и для передачи сигнала шахтной сигнализации для координирующего перемещения в том случае, если упомянутые фиксаторы в одном направлении были отведены, тогда как в другом направлении не все они были отведены,
блок управления координирующим перемещением, предназначенный для приведения в действие упомянутой грузоподъемной машины для вытягивания упомянутой клети для выполнения упомянутого координирующего перемещения после приема упомянутого сигнала шахтной сигнализации для координирующего перемещения;
блок принятия решения, предназначенный для обнаружения состояния отведения упомянутых фиксаторов при заданных условиях после выполнения упомянутого координирующего перемещения и для передачи сигнала обнаружения; и
блок управления обычным перемещением, предназначенный для передачи команды управления упомянутой грузоподъемной машины для вытягивания упомянутой клети для ее перемещения непосредственно в место назначения, если упомянутым сигналом обнаружения указано, что все фиксаторы были отведены.
В качестве одного из вариантов осуществления изобретения, если все фиксаторы, расположенные выше упомянутых ограничителей хода для стопорения, были отведены, но были отведены не все фиксаторы, расположенные ниже их, упомянутым переданным сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения клетью координирующего перемещения вверх, а если все фиксаторы, расположенные ниже упомянутых ограничителей хода для стопорения, были отведены, но были отведены не все фиксаторы, расположенные выше упомянутых ограничителей хода для стопорения, то упомянутым переданным сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения клетью координирующего перемещения вниз.
В качестве одного из вариантов осуществления изобретения, оно дополнительно содержит тормозной блок, предназначенный для передачи команды выполнить стопорение упомянутой грузоподъемной машины в том случае, когда сигналом "фиксатор отведен" указано, что все же имеются фиксаторы, которые не были успешно отведены, расположенные как выше, так и ниже ограничителей хода для стопорения; и/или для передачи команды для выполнения рабочего торможения упомянутой грузоподъемной машины, когда сигналом "фиксатор отведен" указано, что не все упомянутые фиксаторы были отведены при заданных условиях.
В качестве одного из вариантов осуществления изобретения, условием полного отведения упомянутых фиксаторов при упомянутых заданных условиях является, в частности, следующее: все упомянутые фиксаторы были отведены при прохождении заданного максимального расстояния после того, как упомянутой клетью было выполнено координирующее перемещение, или все упомянутые фиксаторы были отведены в течение заданного промежутка времени после того, как упомянутой клетью было пройдено упомянутое заданное максимальное расстояние.
В качестве одного из вариантов осуществления изобретения, когда упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вверх, максимальной скоростью во время упомянутого перемещения вверх является первая максимальная скорость, а максимальной скоростью во время последующего перемещения непосредственно в место назначения является вторая максимальная скорость, при этом величина упомянутой первой максимальной скорости является меньшей, чем величина упомянутой второй максимальной скорости, и
когда упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вниз, максимальной скоростью во время упомянутого перемещения вниз является третья максимальная скорость, а максимальной скоростью во время последующего перемещения непосредственно в место назначения является четвертая максимальная скорость, при этом величина упомянутой третьей максимальной скорости является меньшей, чем величина упомянутой четвертой максимальной скорости.
В качестве одного из вариантов осуществления изобретения, упомянутые вторая максимальная скорость и четвертая максимальная скорость являются равными по величине, упомянутые первая максимальная скорость и третья максимальная скорость являются равными по величине.
Также предложена система грузоподъемной машины, включающая в себя клеть, грузоподъемную машину для подъема упомянутой клети, и дополнительно включающая в себя описанное выше устройство управления грузоподъемной машиной.
Кроме того, в настоящем изобретении предложена машинно-считываемая запоминающая среда, которая хранит команды для обеспечения возможности выполнения машиной любого из вышеупомянутых способов управления грузоподъемной машиной.
Посредством способа, устройства, системы грузоподъемной машины, а также запоминающей среды, которые предложены в настоящем изобретении, оператору шахты необходимо выполнять одну и ту же операцию только лишь один раз без передачи сигнала координирующего перемещения в трех различных сценариях (были отведены все фиксаторы, расположенные выше ограничителей хода для стопорения, были отведены все фиксаторы, расположенные ниже их, и были отведены все фиксаторы, расположенные выше их и ниже их), то есть необходимо только лишь однократно послать обычную команду "пуск" оператору грузоподъемной машины, не рассматривая, в каком сценарии устройство стопорения клети находится. Аналогичным образом, оператору грузоподъемной машины также необходимо привести грузоподъемную машину в действие только один раз, и грузоподъемная машина может автоматически завершить необходимое координирующее перемещение и выполнить обычное перемещение в место назначения путем выполнения высвобождения и торможения за один раз. Для оператора шахты отсутствует необходимость дважды посылать команду оператору грузоподъемной машины, для оператора грузоподъемной машины также отсутствует необходимость дважды приводить ее в действие, и отсутствует необходимость в высвобождении и торможении грузоподъемной машины два раза, т.е. в выполнении перемещения дважды. Эффективность эксплуатации грузоподъемной машины значительно улучшена, система стопорения клети имеет хороший контроль обеспечения безопасности для предотвращения ошибок при работе, допускаемых человеком, имеет место довольно высокая характеристика безопасности, и, в то же самое время, уменьшен износ тормозов в ней, и грузоподъемная машина может автоматически высвобождать устройство стопорения клети после завершения загрузки/разгрузки на горизонте околоствольного двора, и может быть автоматически приведена в действие для перемещения на следующий горизонт околоствольного двора, являющийся местом назначения.
Приведенные ниже сопроводительные чертежи предназначены только лишь для иллюстративного описания и объяснения настоящего изобретения и подразумевают, что они не ограничивают объем настоящего изобретения.
На чертежах изображено следующее:
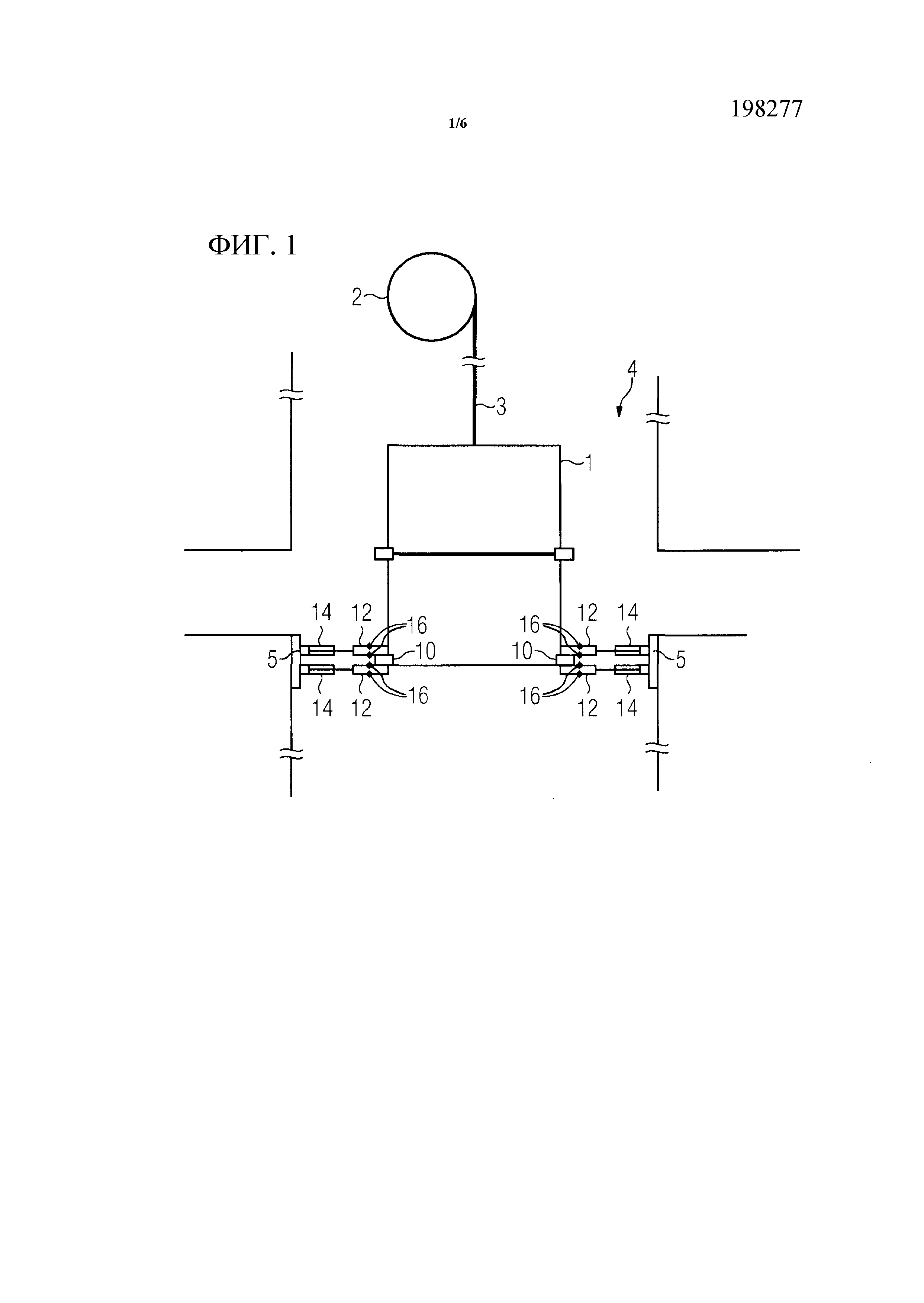
на чертеже Фиг. 1 изображена принципиальная схема клети;
на чертеже Фиг. 2 изображена частичная схема последовательности операций, выполняемых в процедуре согласно вариантам осуществления способа из настоящего изобретения;
на чертежах Фиг. 3a, Фиг. 3b и Фиг. 3c изображены частичные схемы последовательности операций, выполняемых в процедуре согласно вариантам осуществления способа из настоящего изобретения в различных сценариях;
на чертеже Фиг. 4 изображена частичная схема последовательности операций, выполняемых в процедуре согласно вариантам осуществления способа из настоящего изобретения; и
на чертеже Фиг. 5 изображена структурная блок-схема согласно вариантам осуществления устройства из настоящего изобретения.
Перечень ссылочных позиций:
1 - клеть
2 - шахтная грузоподъемная машина
3 - головной канат
4 - шахта
5 - основание
10 - ограничитель хода для стопорения
12 - фиксатор
14 - гидроцилиндр
16 - датчик
100 - устройство управления грузоподъемной машиной
101 - блок обнаружения состояния фиксатора
102 - блок управления координирующим перемещением
103 - блок принятия решения
104 - блок управления обычным перемещением
105 - тормозной блок
106 - блок сигнала координирующего перемещения
Для лучшего понимания технических особенностей, задач и эффектов настоящего изобретения теперь будет приведено описание конкретных вариантов осуществления настоящего изобретения со ссылкой на сопроводительные чертежи.
Для решения проблемы раскачивания и тряски, когда противовес в виде тележки с грузом въезжает в клеть/выезжает из нее, на чертеже Фиг. 1 показана клеть 1, и задача обеспечения устойчивости клети решена путем вставки фиксаторов (или именуемых болтами стопорения клети) в основание клети для стопорения клети.
Как показано на чертеже Фиг. 1, устройство стопорения клети используется для стопорения клети 1 по вертикали в заданном положении загрузки и положении разгрузки, чтобы клеть находилась на одном уровне с поверхностью пола, так, чтобы клеть 1 могла быть устойчиво зафиксирована в относительно точном положении. Устройство стопорения клети обычно закреплено на основании 5 шахты 4 и, в основном, включает в себя восемь фиксаторов 12, причем каждый из них имеет датчик 16 регистрации положения и приводится в действие гидроцилиндрами 14, и в четырех точках рамы днища клети 1 предусмотрены фиксаторы 12, подвижные в направлениях к клети 1, приближаясь к ней, и закрепленные выше и ниже ограничителя 10 хода для стопорения (блока позиционирования) рамы клети. Когда клеть 1 разгружают внизу шахты, то вследствие изменения величины относительного удлинения головного каната 3 клеть 1 перемещается вверх после вывоза груза с вибрационной платформы, в этот момент фиксаторы 12, расположенные выше, соприкасаются с ограничителем 10 хода для стопорения. Когда клеть 1 загружают внизу шахты, то вследствие изменения величины относительного удлинения головного каната клеть 1 перемещается вниз после того, как груз помещен в клеть 1, в этот момент фиксаторы 12, расположенные ниже, соприкасаются с ограничителем 10 хода для стопорения.
Клеть 1 должна останавливаться в пределах интервала погрешности ±20 мм под управлением системы управления подъемной машиной (WCS) для шахтной грузоподъемной машины 2 так, чтобы она находилась на одном уровне с полом. После того как клеть 1 остановлена на месте, фиксаторы 12 перемещаются в направлениях к клети 1, приближаясь к ней, и положения всех этих 8 фиксаторов 12 контролируются датчиками 16. Когда все фиксаторы 12 доходят до их положений выше и ниже ограничителей 10 хода для стопорения, вибрационную платформу опускают и открывают дверь шахты, в этот момент может быть выполнена операция загрузки или разгрузки. После того как операция загрузки или разгрузки завершена, дверь шахты закрывают, и вибрационную платформу поднимают. После того как вибрационная платформа дошла до конечного положения по вертикали, ее застопоривают устройством стопорения на ее боковой стороне, и когда дверь шахты закрыта, и вибрационная платформа поднята, гидравлические цилиндры стараются вытащить фиксаторы из клети, чтобы высвободить клеть.
Видно, что если после загрузки или разгрузки клеть необходимо привести в действие для перемещения в следующее место назначения, то необходимо обеспечить отведение фиксаторов от клети, поэтому во время этой процедуры необходимо управлять грузоподъемной машиной для автоматического высвобождения устройства стопорения клети после завершения загрузки/разгрузки на горизонте околоствольного двора и для автоматического приведения ее в действие для перемещения на следующий горизонт околоствольного двора, являющийся местом назначения.
Со ссылкой на чертеж Фиг. 1, головной канат 3 подъемной системы удлиняется в соответствии с загруженным весом и положением клети 1 в шахте 4, чем большим является загруженный вес, или чем более низким является положение клети 1 в шахте 4, тем большим является относительное удлинение головного каната 3. Для этого после разгрузки клети 1 клеть 1 перемещается вверх, ограничители 10 хода для стопорения, имеющиеся на клети 1, давят на фиксаторы 12, расположенные выше них, тогда как после загрузки клети 1 клеть 1 перемещается вниз, и ограничители 10 хода для стопорения, имеющиеся на клети 1, давят на фиксаторы 12, расположенные ниже их. Такая конструкция фиксаторов 12 и ограничителей 10 хода для стопорения требует, чтобы в том случае, когда ограничители 10 хода для стопорения все еще соприкасаются с фиксаторами 12, фиксаторы 12 не могли бы отходить от их положений, и необходимо, чтобы система управления грузоподъемной машиной 2 перемещала положение клети 1 так, чтобы обеспечить возможность перемещения фиксаторов 12 в направлениях от клети 1. Только те фиксаторы 12, которые не были введены (то есть не соприкасающиеся с ограничителями 10 хода для стопорения), могут быть перемещены в направлениях от клети 1 без перемещения клети 1. Например, если клеть 1 разгружена, то клеть 1 будет перемещаться вверх. Перед выполнением цикла подъема необходимо, чтобы система управления грузоподъемной машиной 2 переместила клеть 1 вниз до тех пор, пока не произойдет расцепление фиксаторов 12, расположенных выше нее. Аналогичным образом, та же самая процедура также должна учитываться при выполнении загрузки, но разница состоит в том, что клеть 1 необходимо перемещать вверх для обеспечения возможности расцепления фиксаторов 12, расположенных ниже ее.
В частности, после того, как клеть 1 находится на месте, выполняют торможение, затем клеть 1 поддерживают четыре (4) фиксатора 12, расположенные выше клети 1, и четыре (4) фиксатора 12, расположенные ниже клети 1; если вес загружен в клеть 1, то клеть 1 будет перемещаться вниз, прикладывая силы к этим четырем (4) фиксаторам 12, расположенным ниже ее, в результате растяжения головного каната 3; перед тем, как клеть 1 может быть перемещена в следующее место назначение, все эти 8 фиксаторов 12 необходимо возвратить в положения за пределами шахты 4; после того, как оператор, находящийся на горизонтальном уровне шахты 4, начинает высвобождать систему стопорения клети, эти восемь (8) фиксаторов 12 соответственно отводят посредством привода, обеспечиваемого гидроцилиндром 14, однако, в положения за пределами шахты 4 могут возвратиться только те четыре (4) фиксатора 12, которые расположены выше, тогда как те четыре (4) фиксатора 12, которые расположены ниже, будут по-прежнему оставаться прижатыми клетью 1 и не могут быть отведены, в этот момент необходимо, чтобы грузоподъемная машина 2 была перемещена вверх на такое расстояние, чтобы также отвести четыре (4) фиксатора 12, расположенные ниже ее. В этот момент все эти восемь (8) фиксаторов 12 возвращаются в положения за пределами шахты 4, и теперь клеть 1 больше не является заблокированной фиксаторами 12 и может перемешаться к следующему месту назначения.
Аналогичным образом, когда вес вывозят из клети 1, то клеть 1 будет перемещаться вверх, прикладывая силы к тем 4 фиксаторам 12, которые расположены выше нее, в результате натяжения головного каната 3; перед тем, как клеть 1 может быть перемещена к следующему месту назначения, необходимо, чтобы все эти восемь (8) фиксаторов 12 возвратились в положения за пределами шахты 4; после того как оператор, находящийся на горизонтальном уровне шахты 4, начинает высвобождать систему стопорения клети, эти 8 фиксаторов 12 соответственно посредством привода при помощи гидроцилиндра 14, однако, в положения за пределами шахты 4 могут возвратиться только те четыре (4) фиксатора 12, которые расположены ниже, тогда как те 4 фиксатора 12, которые расположены выше, будут по-прежнему оставаться удерживаемыми клетью 1 из-за натяжения головного каната 3 и не могут быть отведены, в этот момент необходимо, чтобы грузоподъемная машина 2 была перемещена вниз на такое, расстояние, чтобы также отвести четыре (4) фиксатора 12, расположенные выше нее. В этот момент все эти восемь (8) фиксаторов 12 возвращаются в положения за пределами шахты 4, и теперь клеть 1 больше не является заблокированной фиксаторами и может перемещаться к следующему месту назначения.
Теперь будет приведено подробное описание вариантов осуществления настоящего изобретения вместе со схемами последовательности операций, показанными на чертежах Фиг. 2, Фиг. 3a, Фиг. 3b, Фиг. 3c и Фиг. 4.
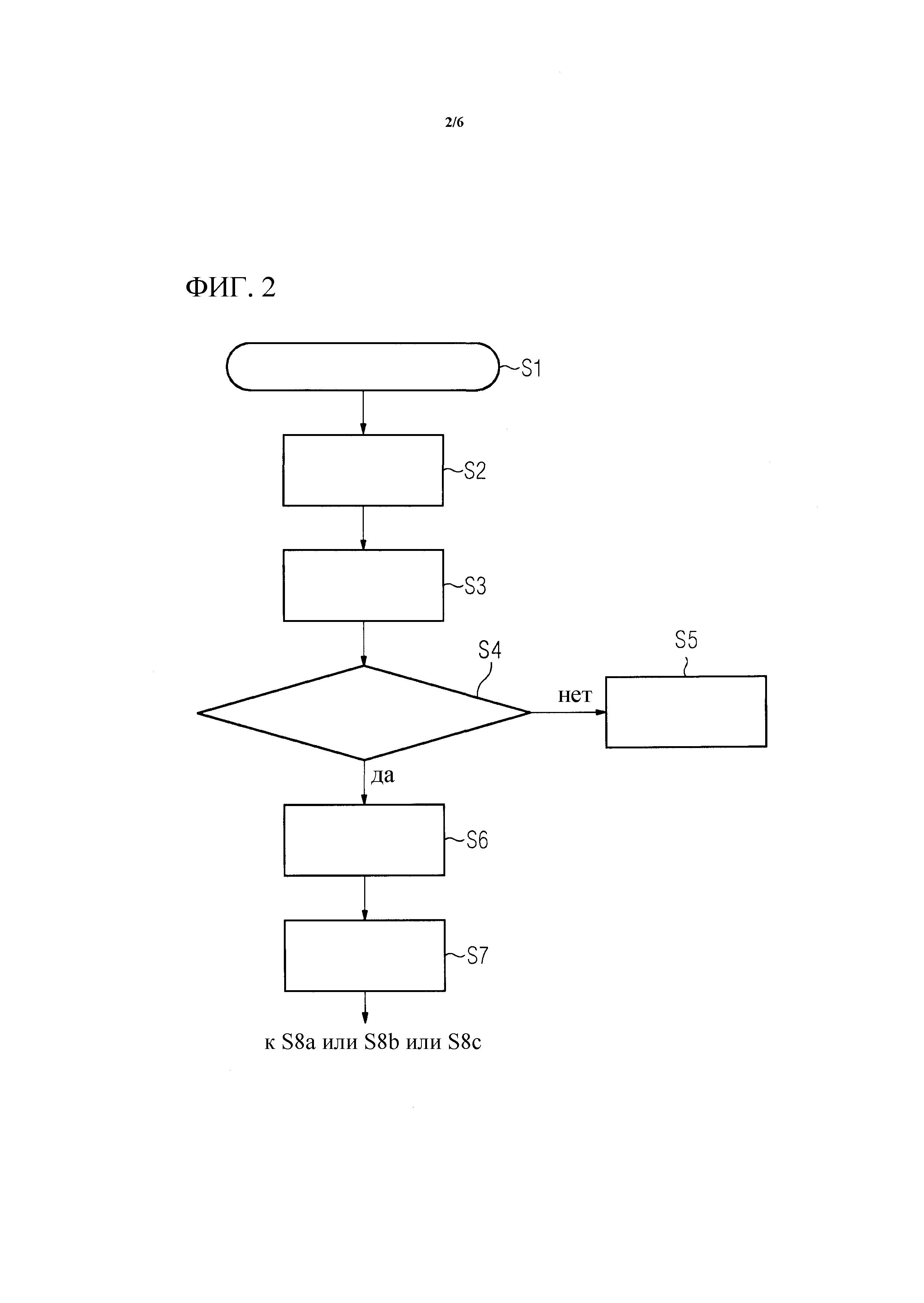
Как показано на чертеже Фиг. 2:
S1: исходное состояние - клеть находится на месте, применено торможение, и клеть застопорена устройством стопорения клети;
S2: выполняют загрузку или разгрузку клети, если в клеть загружают груз, то величина относительного удлинения головного каната становится большой, клеть перемещается вниз, прикладывая силы к четырем (4) фиксаторам, расположенным ниже ее, тогда как в случае вывоза груза из клети величина относительного удлинения головного каната становится малой, и силы приложены к четырем (4) фиксаторам, расположенным выше нее;
S3: после завершения операции S2 оператор, находящийся на горизонтальном уровне шахты 4, начинает операцию высвобождения системы стопорения клети, в этот момент предпринимают попытку отвода этих восьми (8) фиксаторов при помощи привода, обеспечиваемого ее соответствующим гидроцилиндром. В случае операции загрузки, выполняемой при операции S2, возможно, что в положения отвода на удалении от клети возвратятся только те четыре (4) фиксатора, которые расположены выше нее, при этом, возможно не все те четыре (4) фиксатора, которые расположены ниже ее, могут быть отведенными в результате того, что они прижаты клетью; в случае операции разгрузки, выполняемой при операции S2, возможно, что в положения отвода на удалении от клети возвратятся только те четыре (4) фиксатора, которые расположены ниже ее, при этом, возможно, что не все те четыре (4) фиксатора, которые расположены выше нее, могут быть отведенными в результате того, что они прижаты клетью; и если горизонт околоствольного двора, где расположена клеть, является относительно высоким, то возможно, что все из восьми (8) фиксаторов могут возвратиться в положения отвода после завершения операции загрузки в результате того, что головной канат над клетью является более коротким, или того, что изменение нагрузки является меньшим;
S4: судят, были ли отведены все из четырех (4) фиксаторов, расположенных выше, или были ли отведены все из четырех (4) фиксаторов, расположенных ниже;
S5: если результатом суждения при операции S4 является "нет", то есть имеются фиксаторы, которые не были успешно отведены, расположенные как выше, так и ниже, то грузоподъемную машину застопоривают и запрещают снятие с тормоза для работы, и одновременно с этим посылают информацию о неисправности, в которой сообщают, что высвобождение системы стопорения клети закончилось неудачей;
S6: если результатом суждения при операции S4 является "да", то оператор шахты может послать команду обычного перемещения оператору грузоподъемной машины;
S7: после получения команды оператор грузоподъемной машины запускает грузоподъемную машину;
теперь будет приведено описание работы грузоподъемной машины согласно различным сценариям работы:
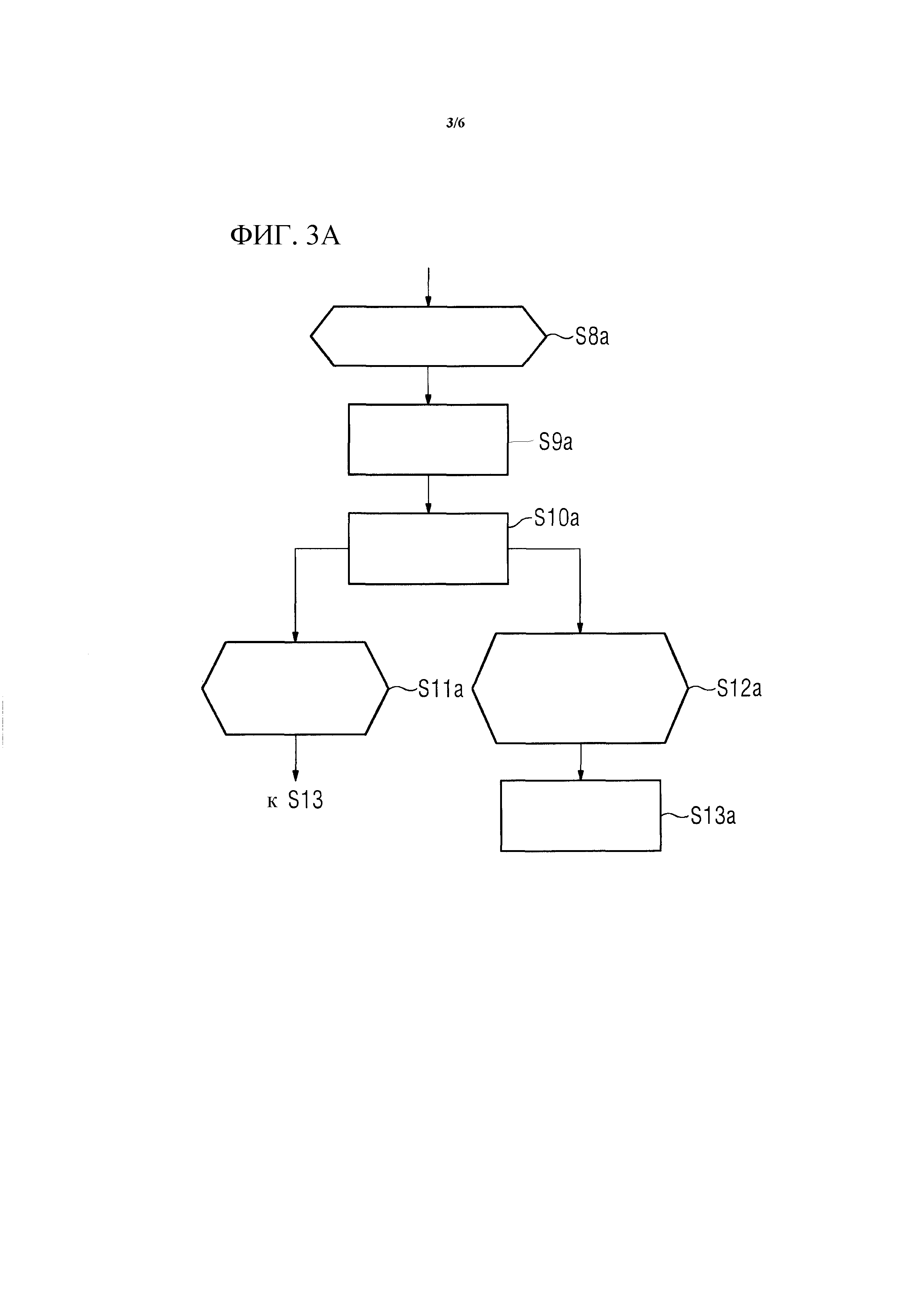
Сценарий I, показанный на чертеже Фиг. 3a:
S8a: в этом сценарии были полностью отведены только те фиксаторы, которые расположены выше (операцией S2 является операция загрузки);
S9a: грузоподъемная машина автоматически отпускает тормоз;
S10a: начинают координирующее перемещение, то есть грузоподъемная машина начинает автоматически перемещаться вверх с относительно низкой максимальной скоростью, равной, приблизительно, 0,1 м/с во время перемещения, что, в основном, обусловлено тем, что устойчивость при работе может быть обеспечена при относительно низкой скорости на сравнительно коротком расстоянии перемещения вверх;
S11a: этот сценарий состоит в следующем: если во время координирующего перемещения при операции S10a все фиксаторы были отведены, то следует выполнить операцию S13;
S12a: если во время координирующего перемещения при операции S10a расстояние перемещения клети доходит до заданного максимального расстояния, то в этот момент клеть прекращает перемещение, и если после ожидания в течение заданного промежутка времени (равного, например 2 секундам (с)) в этот момент все еще имеются какие-либо не отведенные фиксаторы, то есть, если не все фиксаторы были отведены при прохождении упомянутого заданного максимального расстояния и не все упомянутые фиксаторы были отведены за упомянутый заданный промежуток времени, то следует выполнить операцию S13a; при задании величины максимального расстояния в том случае, если максимальное расстояние слишком велико, то имеется вероятность того, что фиксаторы могут столкнуться с клетью, тогда как заданный промежуток времени, в течение которого необходимо ждать, устанавливают, в основном, для ожидания действия гидроцилиндров, то есть для ожидания того, что фиксаторы будут отведены гидроцилиндрами на свое место.
S13a: применяют рабочее торможение и посылают информацию о неисправности, в которой сообщают, что высвобождение системы стопорения клети закончилось неудачей;
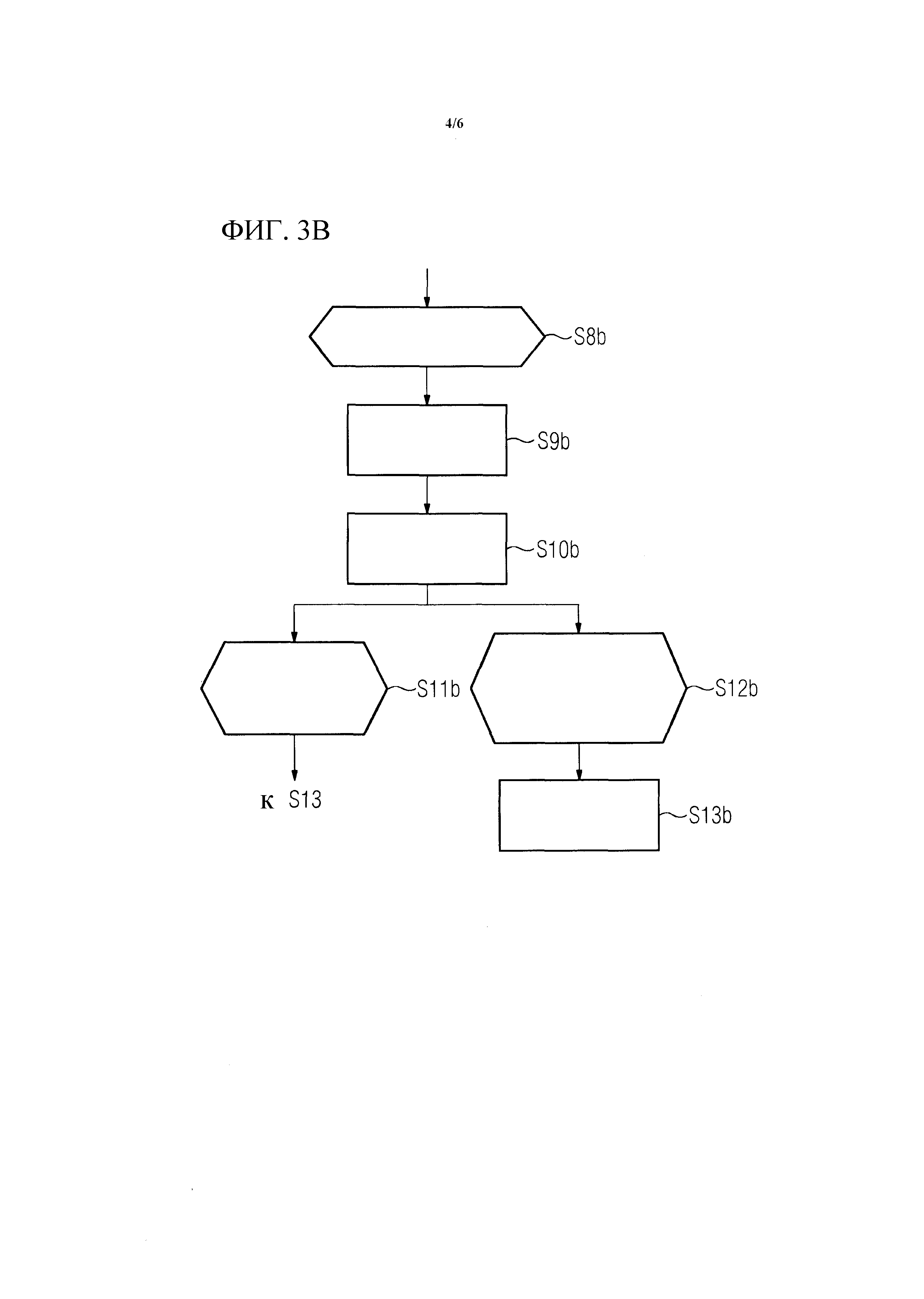
Сценарий II, показанный на чертеже Фиг. 3b:
S8b: в этом сценарии были полностью отведены только те фиксаторы, которые расположены ниже (операцией S2 является операция разгрузки);
S9b: грузоподъемная машина автоматически отпускает тормоз;
S10b: начинают координирующее перемещение, то есть грузоподъемная машина начинает автоматически перемещаться вниз с относительно низкой максимальной скоростью (например, она может быть такой же самой, что и при операции S10a), равной, приблизительно, 0,1 м/с во время перемещения, что, в основном, обусловлено тем, что устойчивость при работе может быть обеспечена при относительно низкой скорости на сравнительно коротком расстоянии перемещения вниз;
S11b: этот сценарий состоит в следующем: если во время координирующего перемещения при операции S10b все фиксаторы были отведены, то следует выполнить операцию S13;
S12b: в этом сценарии, если во время координирующего перемещения при операции S10b расстояние перемещения клети доходит до заданного максимального расстояния, то в этот момент клеть прекращает перемещение, и если после ожидания в течение заданного промежутка времени (равного, например 2 секундам (с)) в этот момент все еще имеются какие-либо не отведенные фиксаторы, то следует выполнить операцию S13b; по той же самой причине, при задании величины максимального расстояния в том случае, если максимальное расстояние слишком велико, то имеется вероятность того, что фиксаторы могут столкнуться с клетью, тогда как заданный промежуток времени, в течение которого необходимо ждать, устанавливают, в основном, для ожидания действия гидроцилиндров, то есть для ожидания того, что фиксаторы будут отведены гидроцилиндрами на свое место;
S13b: применяют рабочее торможение и посылают информацию о неисправности, в которой сообщают, что высвобождение системы стопорения клети закончилось неудачей;
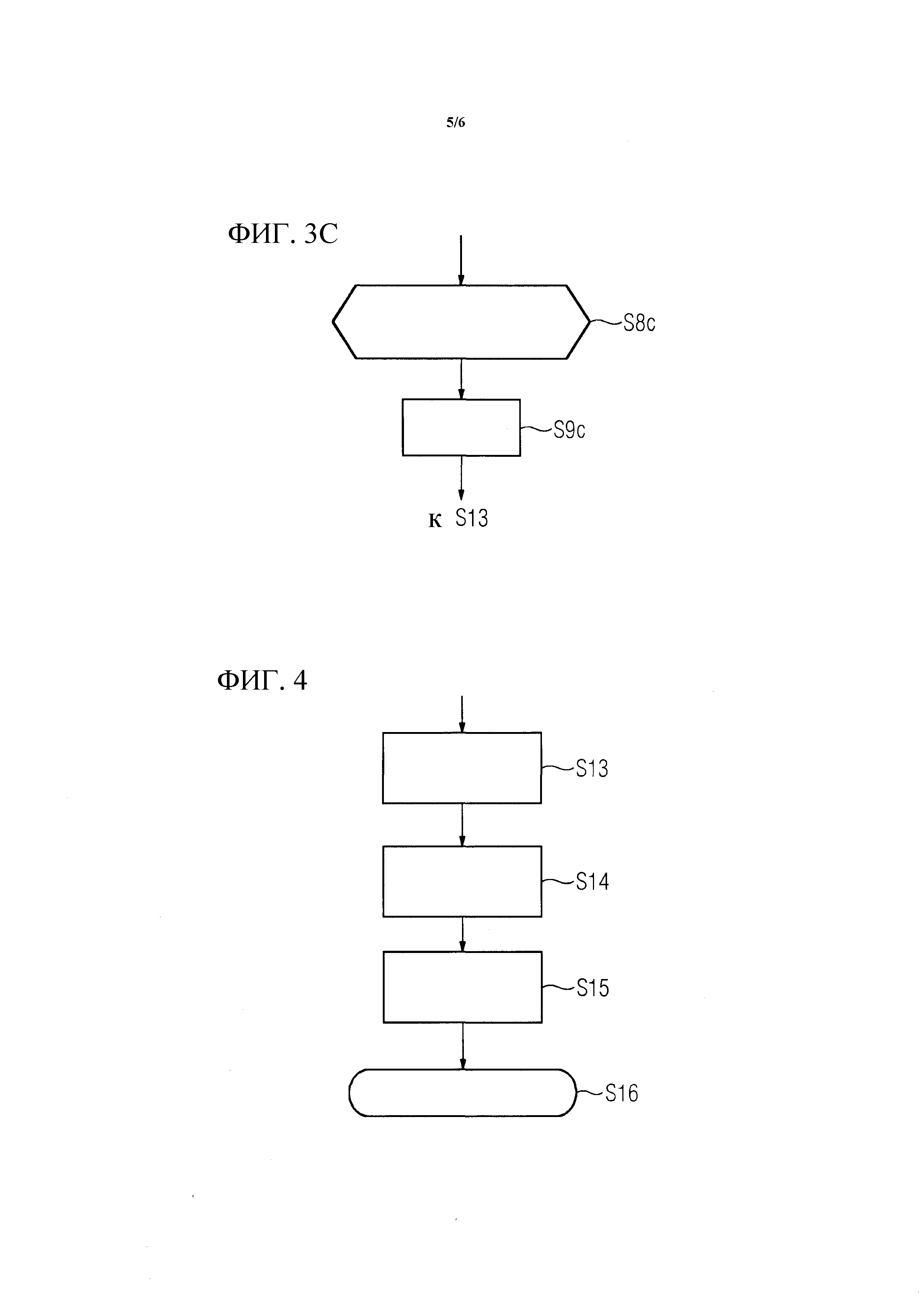
Сценарий III, показанный на чертеже Фиг. 3c:
S8c: в этом сценарии были отведены все те фиксаторы, которые расположены выше и ниже (головной канат над клетью является относительно коротким, или изменение нагрузки является относительно малым);
S9c: грузоподъемная машина автоматически отпускает тормоз;
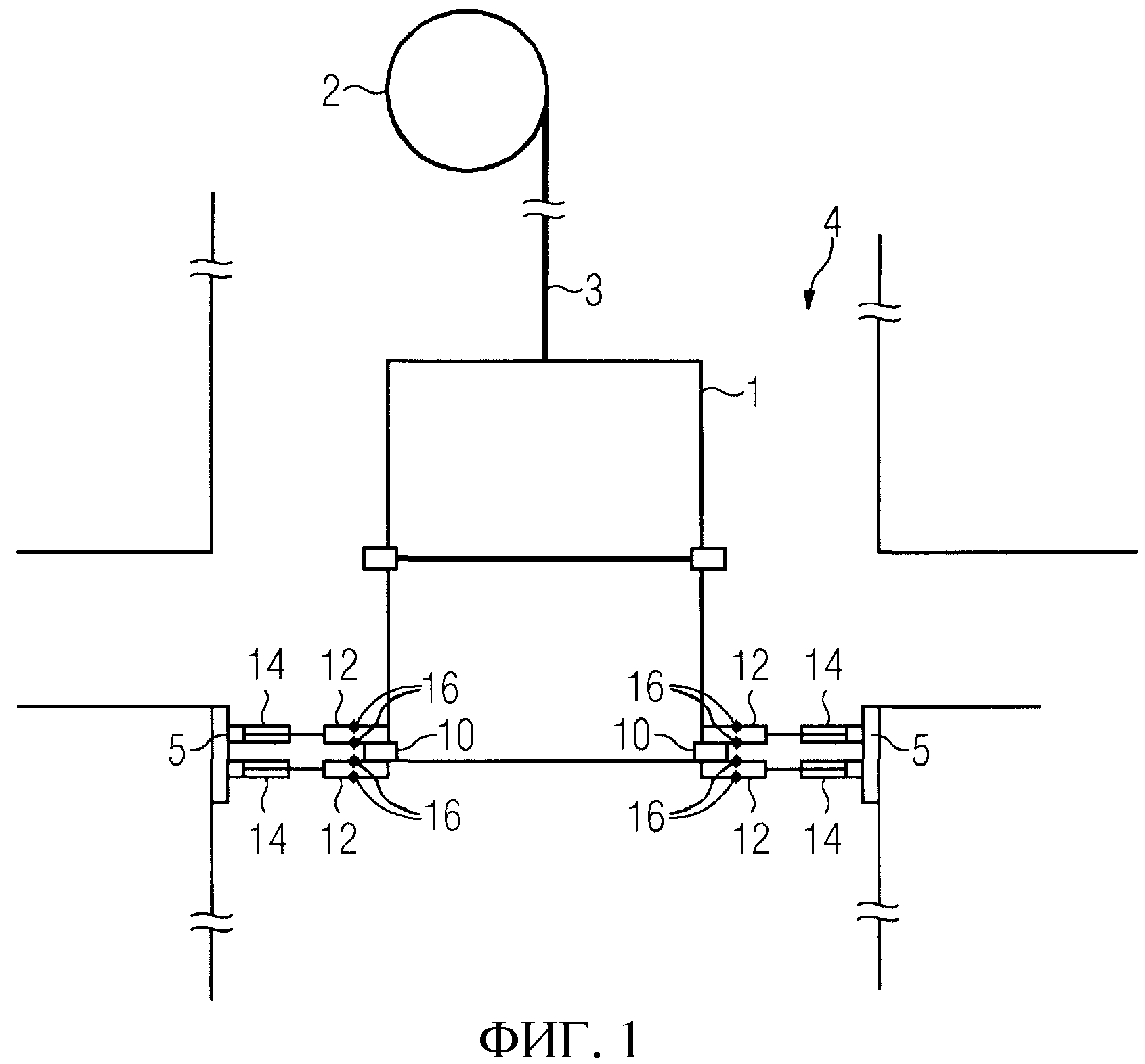
как показано на чертеже Фиг. 4, после каждого из трех вышеупомянутых сценариев, продолжают выполнять следующие операции:
S13: после вышеупомянутого сценария S11a, S11b или S9c грузоподъемная машина начинает выполнять обычное перемещение к ее месту назначения, и величина максимальной скорости при обычном перемещении может быть большей, чем величина максимальной скорости при операции S10a и/или S10b;
S14: когда грузоподъемная машина дошла до места назначения путем обычного перемещения, применяют рабочее торможение;
S15: оператор шахты начинает операцию стопорения клети, выполняемую системой стопорения клети; и
S16: S16 представляет собой конечное состояние, аналогичное исходному состоянию S1, клеть находится на месте, применено торможение, и клеть застопорена устройством стопорения клети, тогда цикл подъема завершен.
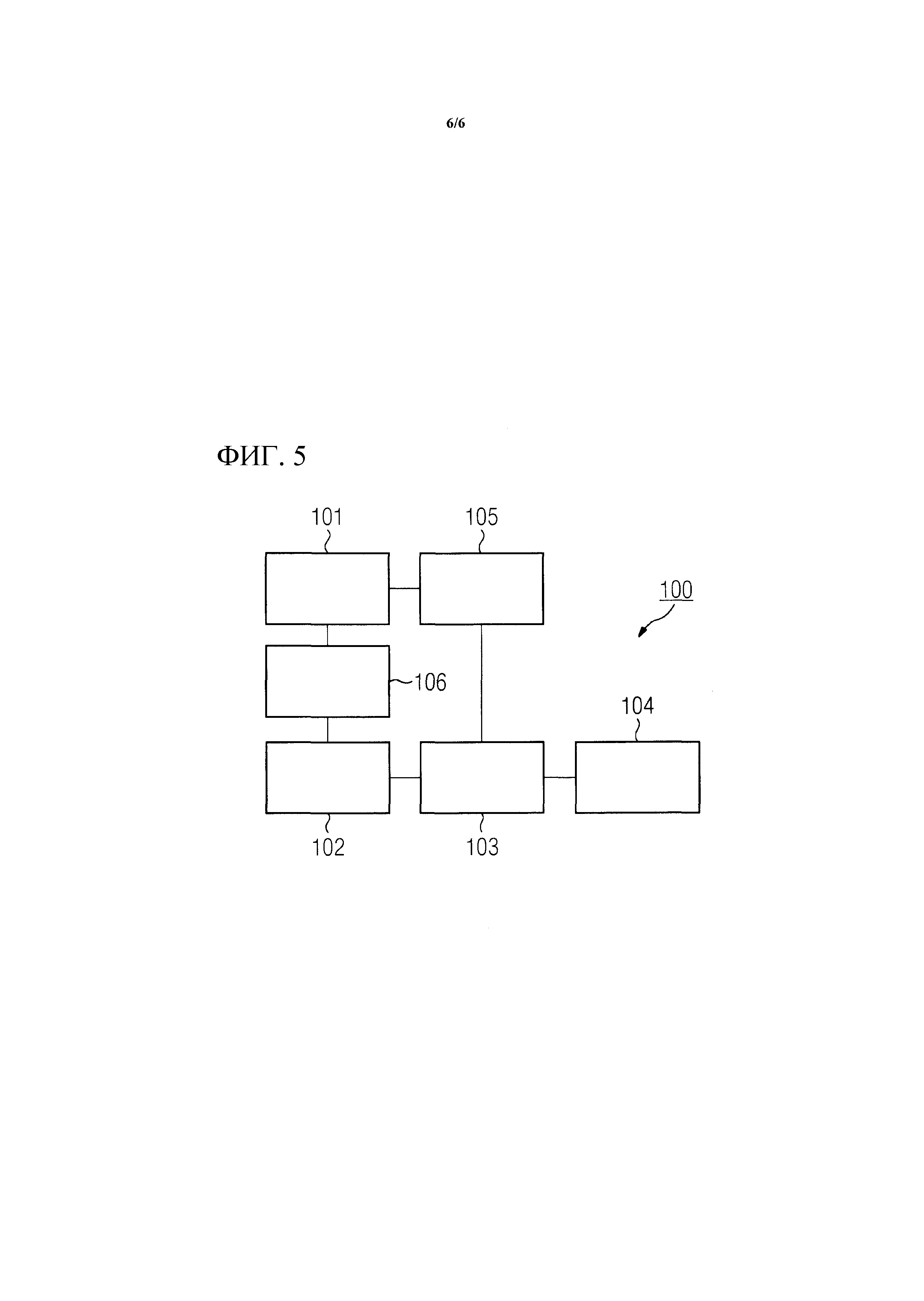
Как показано на чертеже Фиг. 5, в настоящем изобретении также предложено устройство 100 управления грузоподъемной машиной, при этом упомянутая грузоподъемная машина используется для подъема клети, работающей в шахте, дно упомянутой клети снабжено множеством ограничителей хода для стопорения, на основании стены упомянутой шахты размещено множество фиксаторов, причем упомянутые фиксаторы используются для сохранения положения упомянутой клети за счет перемещения в направлениях к упомянутой клети, приближаясь к ней, когда упомянутая клеть остановлена на месте, обеспечивая ее фиксацию выше и ниже упомянутых ограничителей хода для стопорения, и когда необходимо высвободить упомянутую клеть, упомянутые фиксаторы перемещают в направлениях от упомянутой клети, для высвобождения упомянутой клети после того, как все они были отведены, и упомянутое устройство включает в себя:
блок 101 обнаружения состояния фиксатора, предназначенный для обнаружения состояния отведения упомянутых фиксаторов при высвобождении упомянутой клети и для передачи сигнала "фиксатор отведен",
блок 106 сигнала координирующего перемещения, предназначенный для анализа упомянутого сигнала "фиксатор отведен" после его приема и для передачи сигнала шахтной сигнализации для координирующего перемещения в том случае, если упомянутые фиксаторы в одном направлении были отведены, тогда как в другом направлении не все они были отведены,
блок 102 управления координирующим перемещением, предназначенный для приведения в действие упомянутой грузоподъемной машины для вытягивания упомянутой клети для выполнения упомянутого координирующего перемещения после приема упомянутого сигнала шахтной сигнализации для координирующего перемещения;
блок 103 принятия решения, предназначенный для обнаружения состояния отведения упомянутых фиксаторов при заданных условиях после выполнения упомянутого координирующего перемещения и для передачи сигнала обнаружения; и
блок 104 управления обычным перемещением, предназначенный для передачи команды управления упомянутой грузоподъемной машиной для вытягивания упомянутой клети для ее перемещения непосредственно в место назначения, если упомянутым сигналом обнаружения указано, что все фиксаторы были отведены.
В качестве одного из вариантов осуществления изобретения, если все фиксаторы, расположенные выше упомянутых ограничителей хода для стопорения, были отведены, но были отведены не все фиксаторы, расположенные ниже их, то упомянутым переданным сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вверх, если все фиксаторы, расположенные ниже упомянутых ограничителей хода для стопорения, были отведены, но были отведены не все фиксаторы, расположенные выше упомянутых ограничителей хода для стопорения, то упомянутым переданным сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вниз.
В качестве одного из вариантов осуществления изобретения, дополнительно содержится тормозной блок 105 для передачи команды для стопорения упомянутой грузоподъемной машины, когда сигналом "фиксатор отведен" указано, что имеются фиксаторы, которые не были не успешно отведены, расположенные как выше, так и ниже ограничителей хода для стопорения; и/или, для передачи команды, для выполнения рабочего торможения упомянутой грузоподъемной машины, когда сигналом "фиксатор отведен" указано, что не все упомянутые фиксаторы были отведены при заданных условиях.
В качестве одного из вариантов осуществления изобретения, условием полного отведения упомянутых фиксаторов при упомянутых заданных условиях является следующее: все упомянутые фиксаторы были отведены в пределах заданного максимального расстояния после того, как упомянутой клетью выполнено координирующее перемещение, или все упомянутые фиксаторы были отведены в течение заданного промежутка времени после того, как упомянутой клетью было пройдено упомянутое заданное максимальное расстояние.
В качестве одного из вариантов осуществления изобретения, когда упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вверх, максимальной скоростью во время упомянутого перемещения вверх является первая максимальная скорость, а максимальной скоростью во время последующего перемещения непосредственно в место назначения является вторая максимальная скорость, при этом величина упомянутой первой максимальной скорости является меньшей, чем величина упомянутой второй максимальной скорости, и
когда упомянутым сигналом шахтной сигнализации для координирующего перемещения является сигнал для выполнения координирующего перемещения клети вниз, максимальной скоростью во время упомянутого перемещения вниз является третья максимальная скорость, а максимальной скоростью во время последующего перемещения непосредственно в место назначения является четвертая максимальная скорость, при этом величина упомянутой третьей максимальной скорости является меньшей, чем величина упомянутой четвертой максимальной скорости.
В качестве одного из вариантов осуществления изобретения, упомянутые вторая максимальная скорость и четвертая максимальная скорость являются равными по величине, и упомянутые первая максимальная скорость и третья максимальная скорость являются равными по величине.
Кроме того, также предложена такая система грузоподъемной машины, которая включает в себя клеть, грузоподъемную машину для подъема упомянутой клети, дополнительно включающая в себя вышеописанное устройство управления грузоподъемной машиной.
Кроме того, в настоящем изобретении предложена машинно-считываемая запоминающая среда, которая хранит команды для обеспечения возможности выполнения машиной любого из способов управления грузоподъемной машиной согласно описанию из настоящего документа.
В частности, могут быть созданы система или устройство, обеспеченные запоминающей средой, в которой хранятся программные коды, выполняющие функции любого из вышеупомянутых вариантов осуществления изобретения, и которая обеспечивает возможность считывания и исполнения программных кодов, хранящихся в запоминающей среде, компьютером (или центральным процессором (ЦП), или микропроцессором (МП)) системы или устройства.
В этом случае программные коды, считанные с запоминающей среды, по существу, способны выполнять функции любого из вышеупомянутых вариантов осуществления изобретения, следовательно, программные коды и запоминающая среда, хранящая программные коды, составляют часть настоящего изобретения.
Вариантами осуществления запоминающих сред для предоставления программных кодов являются, в том числе, дискеты, накопители на жестких дисках, магнитно-оптические диски, компакт-диски (такие как, например, постоянное запоминающее устройство на компакт-диске (CD-ROM), компакт-диск с возможностью однократной записи (CD-R), компакт-диск с возможностью многократной записи (CD-RW), постоянное запоминающее устройство на универсальном цифровом диске (DVD-ROM), оперативное запоминающее устройство на универсальном цифровом диске (DVD-RAM), универсальный цифровой диск с возможностью многократной записи формата DVD-RW, универсальный цифровой диск с возможностью многократной записи формата DVD+RW), магнитная лента, энергонезависимая карта памяти и постоянное запоминающее устройство (ROM). Возможно, но не обязательно, программные коды могут быть загружены из серверного компьютера через сети связи.
Кроме того, должно быть ясно, что функции любого из вышеупомянутых вариантов осуществления изобретения могут быть выполнены не только за счет выполнения программных кодов, считанных компьютером, но также и за счет предоставления операционной системы, работающей в компьютере, и т.д. возможности выполнять часть или все фактические операции на основании команд из программных кодов.
Кроме того, следует понимать, что программные коды, считанные с запоминающей среды, записывают в запоминающее устройство, предусмотренное в плате расширения в компьютере, или записывают в запоминающее устройство, предусмотренное в блоке расширения, соединенном с компьютером, после чего часть или все фактические операции будут выполняться центральным процессором (ЦП) и т.д., установленным в плате расширения или в блоке расширения, на основании команд из программных кодов для выполнения функций любого из вышеупомянутых вариантов осуществления изобретения.
В настоящем изобретении предложены способ и устройство управления грузоподъемной машиной, в которых при высвобождении клети грузоподъемная машина представляет собой контроллер, который в соответствии с состоянием отведения фиксаторов, расположенных выше или ниже ограничителей хода для стопорения, автоматически завершает координирующее перемещение вверх или вниз и выполняет обычное перемещение в место ее назначения. Способ и устройство из настоящего изобретения могут значительно повысить эффективность эксплуатации грузоподъемной машины, система стопорения клети имеет хороший контроль обеспечения безопасности для предотвращения ошибок при работе, допускаемых человеком, имеют весьма высокую характеристику безопасности, и, в то же самое время, уменьшают износ тормозов в ней.
Посредством способа и устройства управления грузоподъемной машиной, а также системы грузоподъемной машины, предложенной в настоящем изобретении, оператору шахты необходимо выполнять только одну и ту же операцию один раз без передачи сигнала координирующего перемещения в трех различных сценариях (были отведены все фиксаторы, расположенные выше ограничителей хода для стопорения, были отведены все фиксаторы, расположенные ниже их, и были отведены все фиксаторы, расположенные выше их и ниже их), то есть необходимо всего лишь послать обычную команду "пуск" оператору грузоподъемной машины один раз, не принимая во внимание сценарий, в котором находится устройство стопорения клети. Аналогичным образом, оператору грузоподъемной машины также необходимо привести в действие грузоподъемную машину только лишь один раз, и грузоподъемная машина может автоматически завершить необходимое координирующее перемещение и выполнить обычное перемещение в ее место назначения путем высвобождения и применять тормоза за один раз. Для оператора шахты отсутствует необходимость передачи команды оператору грузоподъемной машины два раза, для оператора грузоподъемной машины также отсутствует необходимость приводить ее в действие два раза, и отсутствует необходимость в высвобождении и в применении торможения грузоподъемной машины два раза, то есть перемещение не выполняют дважды. Эффективность эксплуатации грузоподъемной машины значительно улучшена, система стопорения клети имеет хороший контроль обеспечения безопасности для предотвращения ошибок при работе, допускаемых человеком, имеет место довольно высокая характеристика безопасности, и, в то же самое время, уменьшен износ тормозов в ней, и грузоподъемная машина может автоматически высвобождать устройство стопорения клети после завершения загрузки/разгрузки на горизонте околоствольного двора, и может быть автоматически приведена в действие для перемещения на следующий горизонт околоствольного двора, являющийся местом назначения.
Приведенное выше описание приведено просто в качестве иллюстративного примера конкретных вариантов осуществления настоящего изобретения, и подразумевают, что оно не ограничивает объем настоящего изобретения. Любое эквивалентное изменение, видоизменение и объединение, сделанное специалистами в данной области техники, не выходя за пределы концепции и принципов настоящего изобретения, должно подпадать под объем правовой охраны настоящего изобретения.
Способ изготовления отверстия
Горелочное устройство
Система управления, управляющее вычислительное устройство и способ функционирования системы управления
Система регулирования тока и способ для регулирования тока
Проводниковая система для резистивного переключательного элемента по меньшей мере с двумя связками проводников из сверхпроводящих проводниковых лент
Устройство для энергопитания длинной статорной обмотки с несколькими секциями обмотки
Магнитное устройство электрической машины с трубопроводом охладителя
Защищенная от манипулирования передача данных между автоматизированными приборами
Составная часть машины и газовая турбина
Силовой полупроводниковый модуль с боковыми стенками слоистой конструкции
Компрессор для газовой турбины
Элемент горелки и горелка с коррозионно-стойкой вставкой
Плавильная печь
Устройство с телом датчика
Абсорбент, способ его получения и его применение
Способ и устройство для классификации генерирующих звук процессов
Электронный предохранитель блока электропитания
Конструктивный элемент с каталитической поверхностью, способ его изготовления и применение этого конструктивного элемента
Способ сварки и конструктивный элемент
Способ изготовления отверстия

