Результат интеллектуальной деятельности: ПРИЕМНОЕ УСТРОЙСТВО, СПОСОБ ПРИЕМА И ПРОГРАММА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящая технология относится к приемному устройству, способу приема и программе, и, более конкретно, к приемному устройству, способу приема и программе для реализации быстрого начала демодуляции данных.
Уровень техники
OFDM
При передаче данных посредством OFDM (мультиплексирование с ортогональным частотным разделением сигналов) большое количество ортогональных поднесущих используют в полосе частоты передачи, и данные распределены по амплитуде и фазе каждой поднесущей. И передают данные каждого символа, называемого символом OFDM. Во время передачи выполняют IFFT (быстрое обратное преобразование Фурье) для каждого символа OFDM.
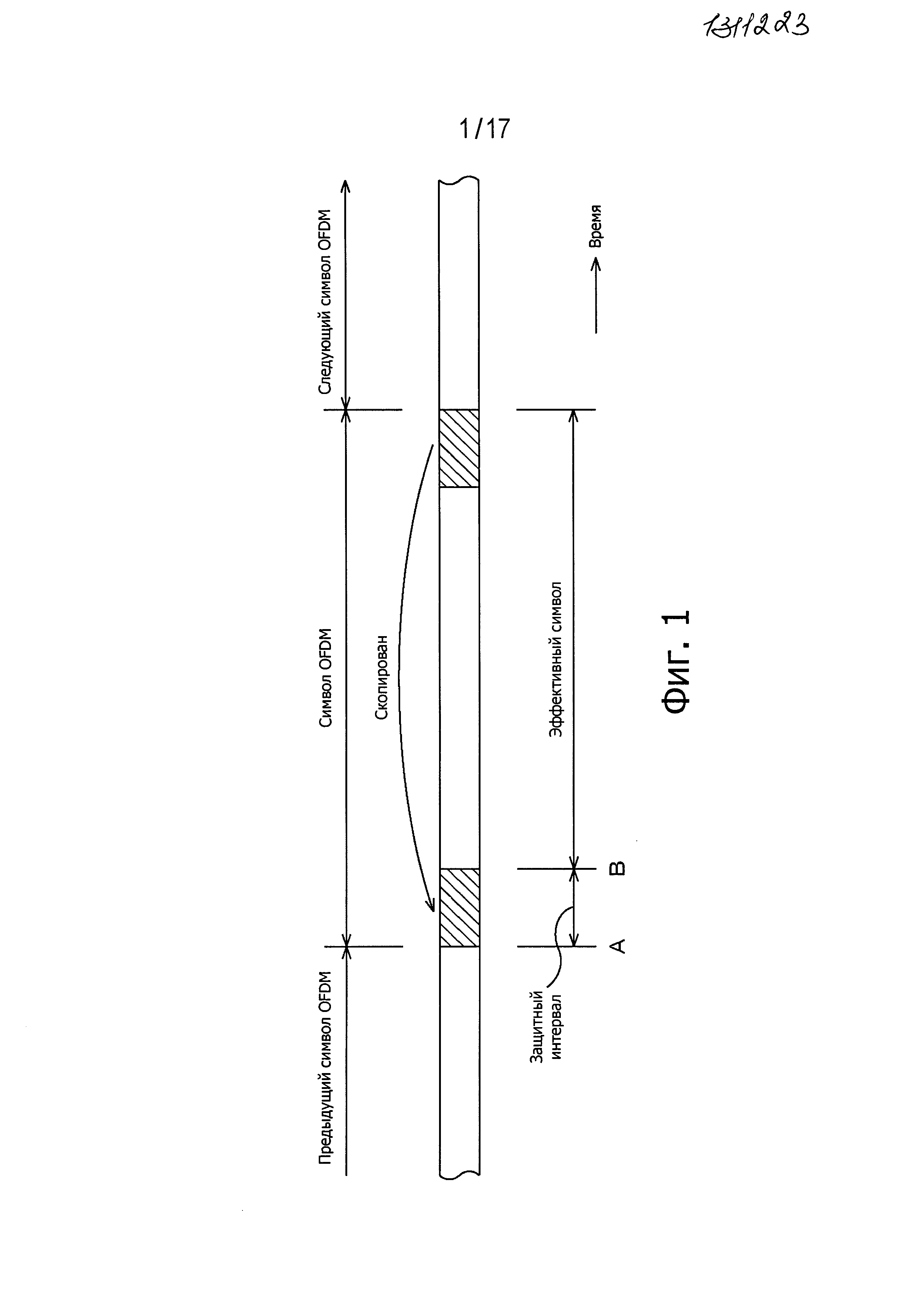
Фиг.1 является диаграммой, на которой показаны символы OFDM. Символ OFDM обычно сформирован из эффективного символа, являющимся сигнальным интервалом, для которого во время передачи выполняют IFFT, и защитного интервала (GI), формируемого копированием формы сигнала части последней половины эффективного символа, и расположение копии в начале эффективного символа.
Поскольку защитный интервал сформирован в начале символа OFDM, может быть увеличена устойчивость к многолучевости. Такие символы образуют один кадр передачи OFDM.
Сигнализация в DVB-T2
DVB-T2 (второе поколение стандартов цифрового ТВ-вещания в Европе) является стандартами цифрового ТВ-вещания с использованием OFDM. В соответствии с DVB-T2, определены кадры, называемые кадрами Т2, и данные передают посредством кадра Т2.
Каждый кадр Т2 содержит два типа сигналов преамбулы, называемых Т1 и Т2, и эти сигналы преамбулы содержат информацию, необходимую для выполнения операций, таких как демодуляция сигнала OFDM.
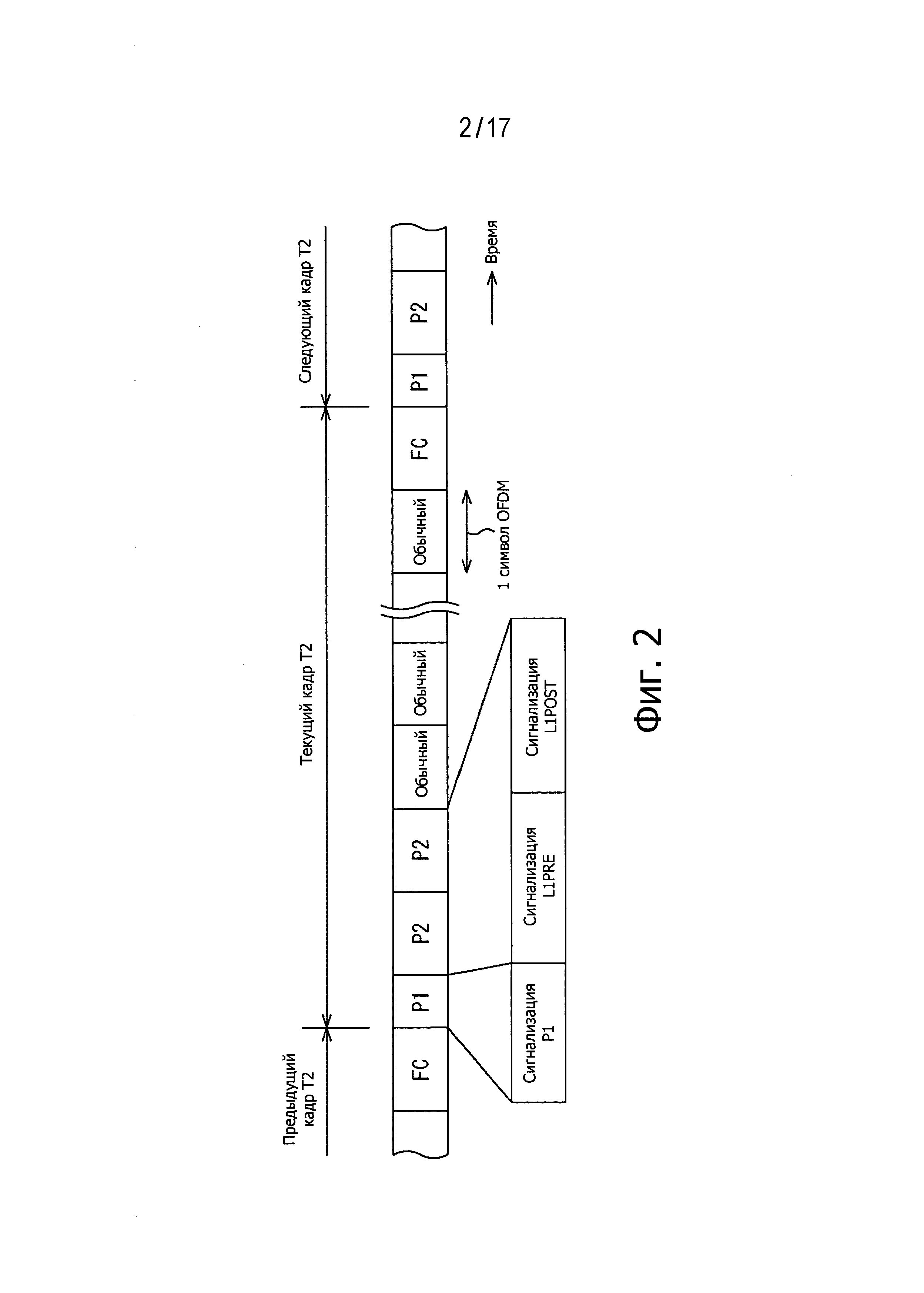
Фиг.2 является диаграммой, показывающей структуру кадра Т2. Как показано на фиг.2, один кадр Т2 включает в себя символ Р1, символы Р2 и символы данных (Обычный или FC) в данном порядке.
Символ Р1 является символом для передачи сигнализации Р1 и содержит следующую информацию с а по d.
a. Идентификация кадра
b. Способ передачи
c. Размер FFT
d. Частичная длина GI
Идентификация кадра указывает, является ли кадр кадром передачи или FEF (кадр для будущих расширений). Способ передачи указывает, является ли способ передачи SISO (единственный ввод, единственный вывод) или MISO (множественный ввод, единственный вывод). Размер указывает количество точек в одной операции IFFT на передающей стороне. Частичная длина GI указывает, к какой группе принадлежит длина GI, используемой при передаче символа, и семь типов длин разделены на две группы. То есть только группа длины может быть распознана из сигнализации Р1, и для распознавания длины GI должна быть декодирована сигнализация, содержащаяся в символе Р2.
Символы Р2 являются символами для передачи сигнализации L1PRE и сигнализации L1POST. В дальнейшем, там, где это уместно, сигнализация L1PRE будет называться L1PRE, и сигнализация L1POST будет называться L1POST. L1PRE содержит информацию, необходимую для декодирования L1POST, и следующую управляющую информацию с е по g, необходимую для демодуляции символа данных. L1POST содержит параметры, необходимые приемнику для доступа к физическому уровню.
e. Длина GI
f. Время для опознавания сигнала, называемого Рассеянным Пилот-сигналом (8Р)/шаблоном интервала в частотном направлении
g. Количество символов в одном кадре
Если информация с е по g в L1PRE может быть декодирована, приемное устройство может оценить характеристики канала, используя SP, и может выполнить коррекцию символа данных выполнением интерполяции во временном направлении/частотном направлении.
В качестве размеров FFT в символах определены шесть типов размеров 1 К, 2 К, 4 К, 8 К, 16 К и 32 К. В качестве длин GI в символах Р2 определены семь типов размеров 1/128, 1/32, 1/16, 19/256, 1/8, 19/128 и 1/4. Такой же размер FFT и такую же длину GI, что и размер FFT и длина символов (Обычный, FCS), отличных от Р1 и Р2, выбирают для символов Р2.
Список документов
Непатентная литература
Непатентная литература 1: ″Структура кадра кодирования и модуляции канала для второго поколения системы цифрового наземного телевизионного вещания (DVB-T2)″, Документ DVB А122, июнь 2008 г.
Раскрытие изобретения
Задачи, решаемые изобретением
Последовательность синхронизации
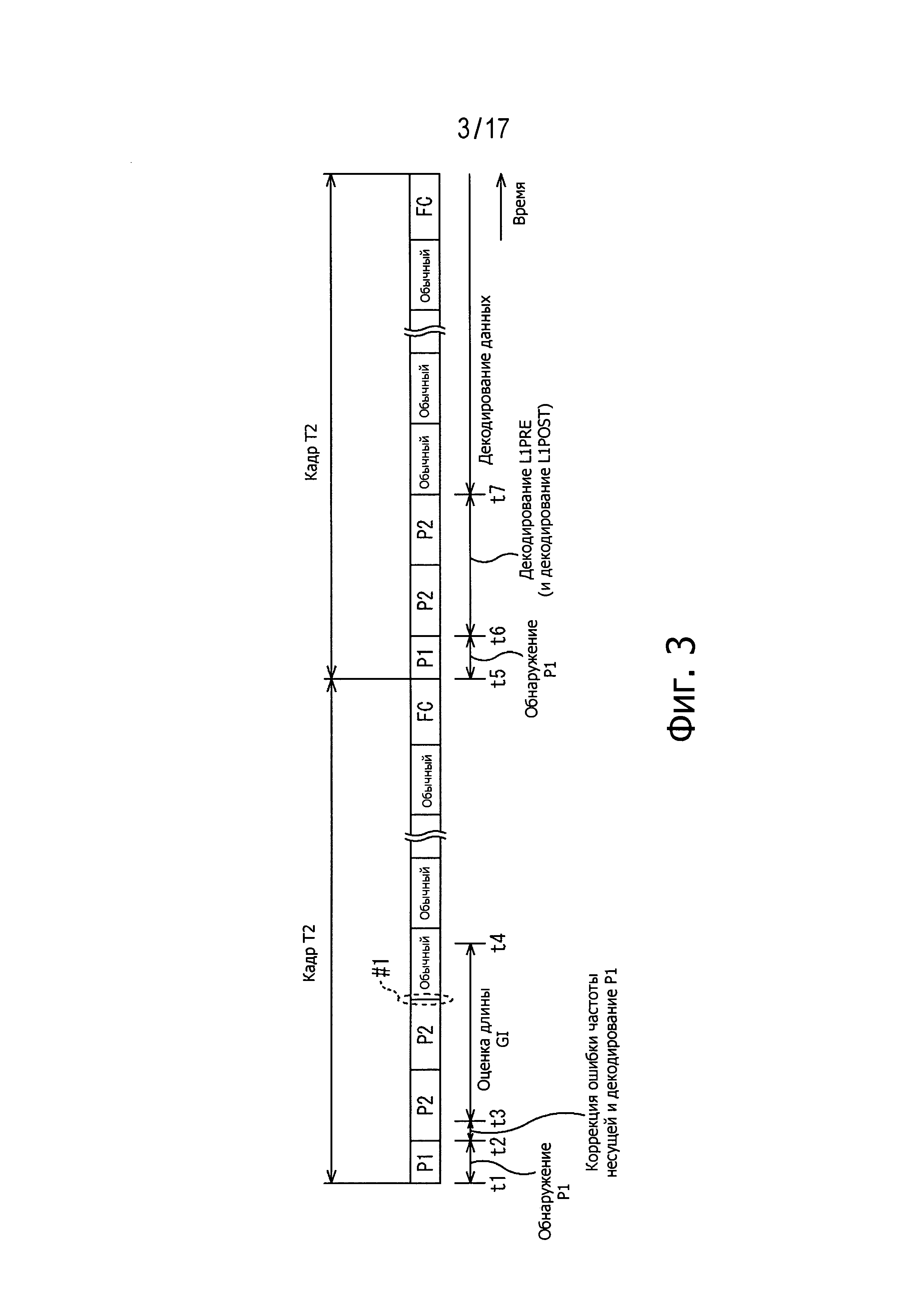
Руководство по реализации (IG) вводит в использование последовательность синхронизации, учитывающую ошибки частоты несущей Сигнализации Р1 и Р2 и сигналов OFDM. Фиг.3 является диаграммой для пояснения последовательности синхронизации в соответствии с GI. Поперечное направление на фиг.3 представляет время.
В последовательности синхронизации в соответствии с IG приемное устройство обнаруживает символ Р1 в начале операции.
После обнаружения символа Р1 приемное устройство оценивает ошибку частоты несущей. Для сигнала символа Р1 приемное устройство корректирует так называемую ″Точную″ ошибку частоты несущей, которая меньше интервала несущей, и корректирует так называемую ″Грубую″ ошибку частоты несущей, которая равна интервалу несущей. После корректировки ошибки частоты несущей, приемное устройство декодирует Сигнализацию Р1 из скорректированного сигнала символа Р1.
Декодируя Сигнализацию Р1, приемное устройство может распознать размеры FFT символов Р2 и символов данных (Обычный, FC).
Что касается длины GI, Сигнализация Р1 содержит только часть информации о длине GI, как это было описано выше. Следовательно, приемное устройство не может определить длину символов Р2, и распознать конец символов Р2. Конец символов Р2 расположен в позиции границы между последним символом Р2 и первым символом данных в кадре Т2, как это обозначено пунктирной линией #1 на фиг.3.
Поскольку оценка ошибки частоты несущей и декодирование Сигнализации Р1 требует времени, сигнал между временем t2 и временем t3, который является сигналом части символа Р2, не подвергают корректировке ошибки частоты несущей до его прохождения.
Следовательно, приемное устройство не может демодулировать символ Р2, содержащийся в кадре Т2. Используя оставшиеся символы в первом кадре, приемное устройство оценивает длину GI, необходимую для демодуляции символов Р2.
После оценки длины GI приемное устройство ожидает следующий кадр Т2 и обнаруживает начало символа Р1. Приемное устройство декодирует символ Р2, который непосредственно следует за символом Р1. При демодуляции символа Р2 используют размер FFT, распознанный из Сигнализации Р1 в первом кадре Т2, и длину GI, оцененную из символов в первом кадре Т2. Приемное устройство может декодировать L1PRE демодуляцией символа Р2. После декодирования L1PRE, приемное устройство декодирует L1POST и может демодулировать символы данных, используя декодированный L1PRE и информацию L1POST.
В приведенном выше описании последовательности синхронизации по IG символ Р2, содержащийся в первом кадре Т2, не может быть демодулирован, и, следовательно, возникает задержка, эквивалентная одному Т2 кадру, до установки синхронизации. В соответствии с DVB-T2, время одного кадра Т2 в максимуме равно 250 мс, и возникают потери максимум в 250 мс между началом демодуляции и концом демодуляции символов данных. Когда синхронизация установлена, декодирование L1PRE и L1POST завершено, и, символы данных могут быть демодулированы.
Настоящая технология была разработана с учетом этих обстоятельств, и ее задачей является реализация быстрого начала демодуляции данных.
Решение задачи
Приемное устройство в одном аспекте настоящей технологии включает в себя: блок обнаружения для обнаружения первого сигнала преамбулы в сигнале кадра, имеющего структуру, содержащую первый сигнал преамбулы, указывающий раздел кадра, второй сигнал преамбулы, содержащий управляющую информацию для использования при обработке сигнала данных, и сигнал данных, при этом второй сигнал преамбулы передают после первого сигнала преамбулы; блок накопления для накопления второго сигнала преамбулы при обнаружении первого сигнала преамбулы; и блок обработки для обработки сигнала данных на основе управляющей информации, содержащейся во втором сигнале преамбулы, накопленного в блоке накопления, при этом сигнал данных, содержится в том же кадре, что и второй сигнал преамбулы, накопленный в блоке накопления.
Первый сигнал преамбулы может быть расположен в начале кадра или может быть расположен в позиции, отличной от начала.
Блок накопления выполнен с возможностью накопления количества данных, эквивалентном наибольшему возможному количеству данных, в качестве количества данных во втором сигнале преамбулы, при этом данные расположены непосредственно после первого сигнала преамбулы.
Сигнал кадра может быть сигналом кадра Т2, совместимым с DVB-T2, сигнал первой преамбулы может быть сигналом символа Р1, сигнал второй преамбулы может быть сигналом символа Р2, и сигнал данных может быть сигналом символа данных.
Приемное устройство может дополнительно включать в себя: блок оценки для оценки длины GI символов, образующих кадр Т2, на основе участка сигнала кадра Т2; блок управления для определения количества данных символа Р2 на основе размера FFT, указанного информацией, содержащей в символе Р1, длину GI, оцененную блоком оценки, и считывания из блока накопления сигнала, имеющего определенное количество данных, в качестве символа Р2.
Блок обработки может включать в себя: блок выполнения операции FFT для выполнения операции FFT для сигнала символа Р2, считываемого из блока накопления, начальная позиция операции является позицией, которая находится за позицией символа Р1 на величину длины GI, оцененную блоком оценки, интервал FFT является интервалом, начинающимся с начальной позиции, и имеет размер, эквивалентный размеру FFT, блок выравнивания для выполнения выравнивания сигнала символа Р2 в частотном диапазоне, полученного посредством операции FFT, и блок декодирования для декодирования Сигнализации L1PRE и Сигнализации L1POST из выровненного сигнала символа Р2.
Блок обработки может быть образован не только блоком выполнения операции FFT, блоком выравнивания и блоком декодирования, но и быть образованным по меньшей мере одним из блоков выполнения операции FFT, блоков выравнивания и блоков декодирования.
Приемное устройство может дополнительно включать в себя блок поиска для поиска интервала FFT на основе сигнала символа Р2 в частотном диапазоне. В этом случае, когда поиск, выполняемый блоком поиска, завершен, блок управления может заново считать сигнал символа Р2 из блока накопления, и блок выполнения операции FFT может выполнить операцию FFT для сигнала в интервале FFT, обнаруженным при поиске, сигнал в интервале FFT является заново считанным сигналом символа Р2.
Блок выравнивания может включать в себя: блок оценки характеристик канала для извлечения пилот-сигнала из сигнала символа в частотном диапазоне, и оценки характеристики канала поднесущей в местоположении пилот-сигнала; блок интерполяции для выполнения интерполяции, с использованием фильтра интерполяции, характеристик канала, оцененных блоком оценки характеристик канала; блок корректировки, корректирующий искажение сигнала символа в частотном диапазоне на основе характеристик канала всех поднесущих, определенных посредством интерполяции, выполненной блоком интерполяции. В данном случае приемное устройство может дополнительно включать в себя блок поиска для поиска центральной позиции полосы пропускания фильтра интерполяции на основе сигнала символа Р2 в частотном диапазоне. Когда поиск посредством блока поиска завершен, блок управления может заново считать из блока накопления сигнал символа Р2, блок выполнения операции FFT может выполнить операцию FFT для заново считанного сигнала символа Р2, и блок интерполяции может выполнить интерполяцию характеристик канала с центральной позицией полосы пропускания фильтра интерполяции, которая является центральной позицией, обнаруженной блоком поиска.
В первом аспекте настоящей технологии сигнал первой преамбулы обнаруживают из сигнала кадра, имеющего структуру кадра, содержащую сигнал первой преамбулы, указывающей раздел кадра, сигнал второй преамбулы, передаваемый после сигнала первой преамбулы и содержащий управляющую информацию, используемую при обработке сигнала данных, и сигнал данных. Когда обнаружен сигнал первой преамбулы, накапливают сигнал второй преамбулы. Сигнал данных, содержащийся в том же кадре, что и накопленный сигнал второй преамбулы, обрабатывают на основе управляющей информации, содержащейся в сигнале второй преамбулы.
Эффекты изобретения
Согласно настоящей технологии может быть быстро начата демодуляция данных.
Краткое описание чертежей
Фиг.1 является диаграммой, на которой показаны символы OFDM.
Фиг.2 является диаграммой, на которой показаны структуры кадров Т2.
Фиг.3 является диаграммой для пояснения последовательности синхронизации согласно IG.
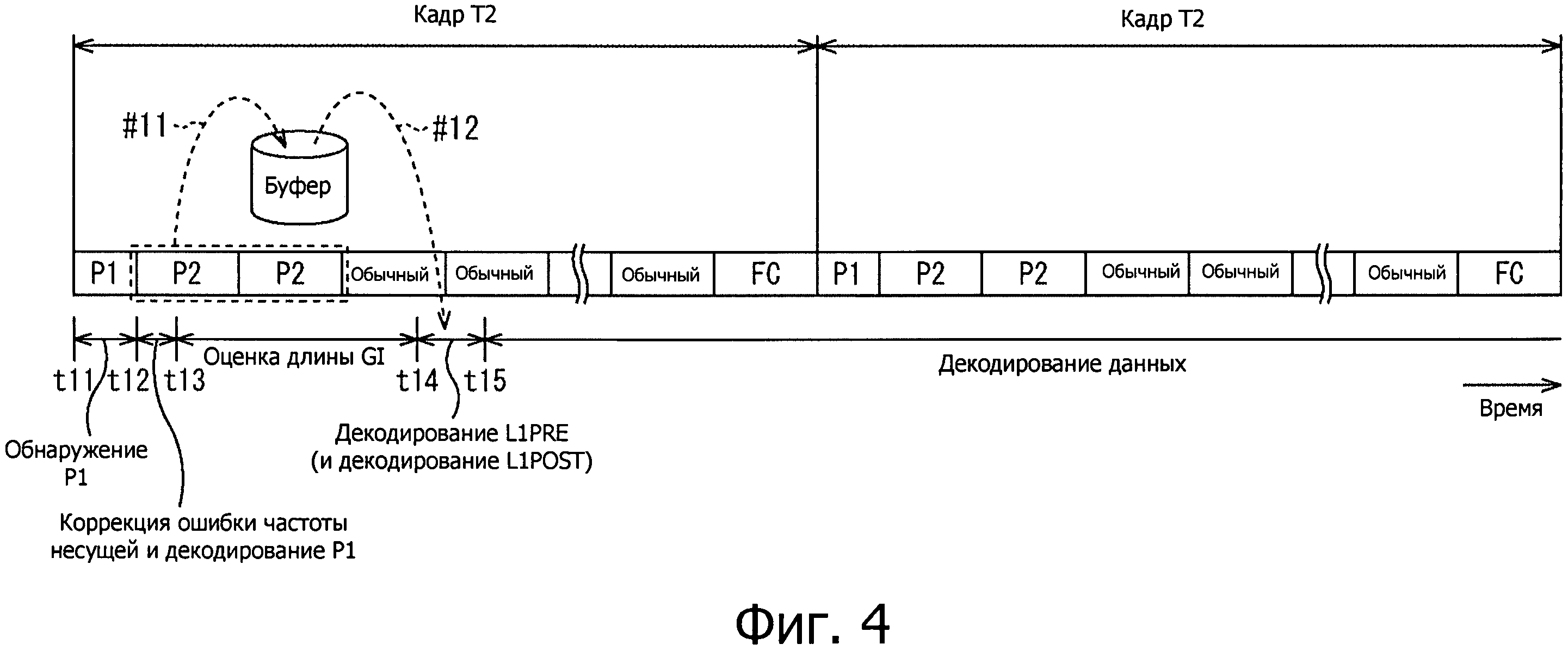
Фиг.4 является диаграммой для пояснения последовательности синхронизации в приемном устройстве согласно варианту осуществления настоящей технологии.
Фиг.5 является блок-схемой, на которой показан пример структуры приемного устройства согласно варианту осуществления настоящей технологии.
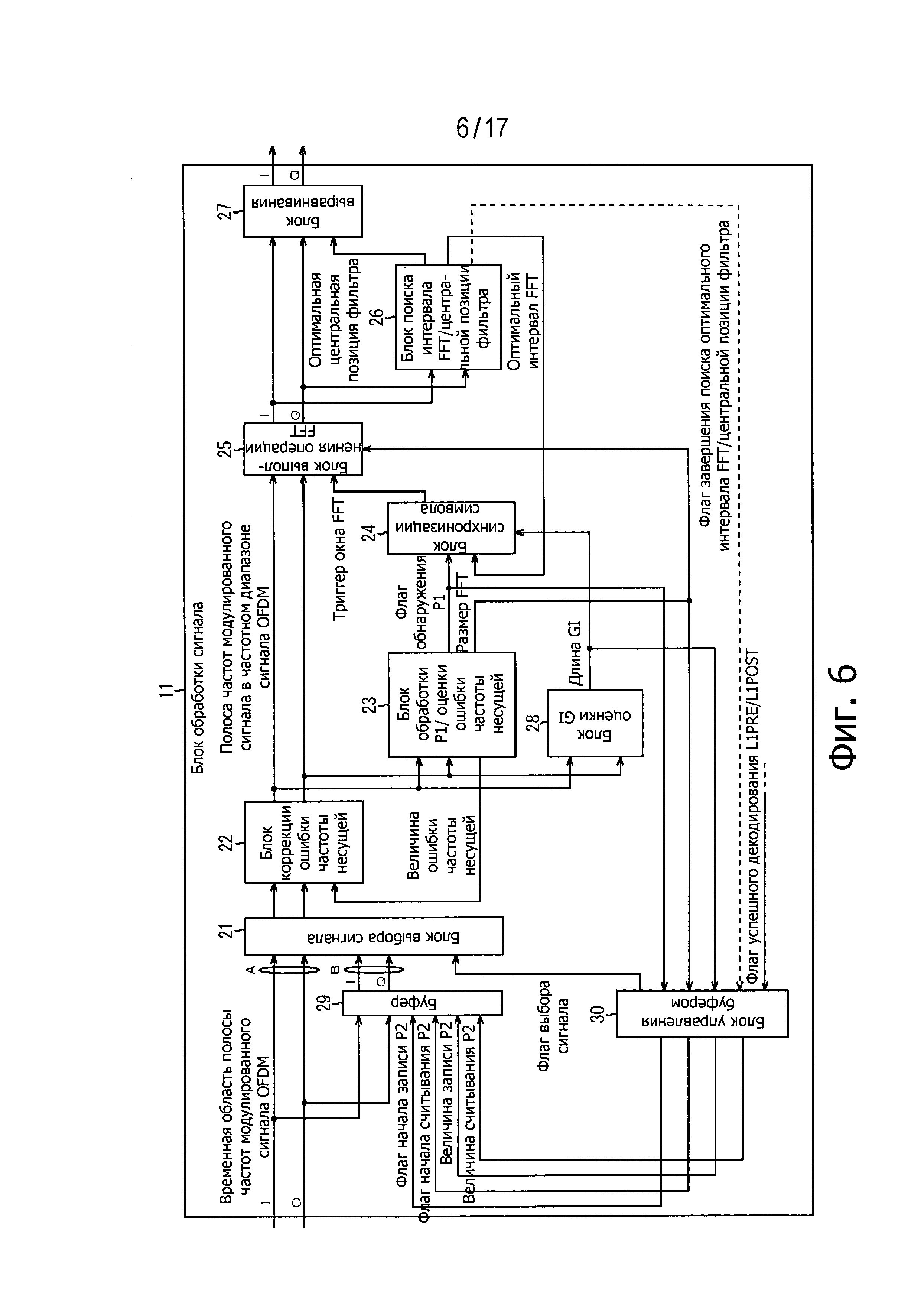
Фиг.6 является блок-схемой, на которой показан пример структуры блока обработки сигнала.
Фиг.7 является блок-схемой для пояснения операций в приемном устройстве. Фиг.8 является блок-схемой для пояснения операций в приемном устройстве, продолжение фиг.7.
Фиг.9 является диаграммой для пояснения другой последовательности синхронизации.
Фиг.10 является диаграммой, на которой показан пример интервала и полосы пропускания фильтра в фильтре интерполяции.
Фиг.11 является блок-схемой, на которой показан пример структуры блока выравнивания.
Фиг.12 является блок-схемой для пояснения других операций в приемном устройстве.
Фиг.13 является блок-схемой для пояснения других операций в приемном устройстве, продолжение фиг.12.
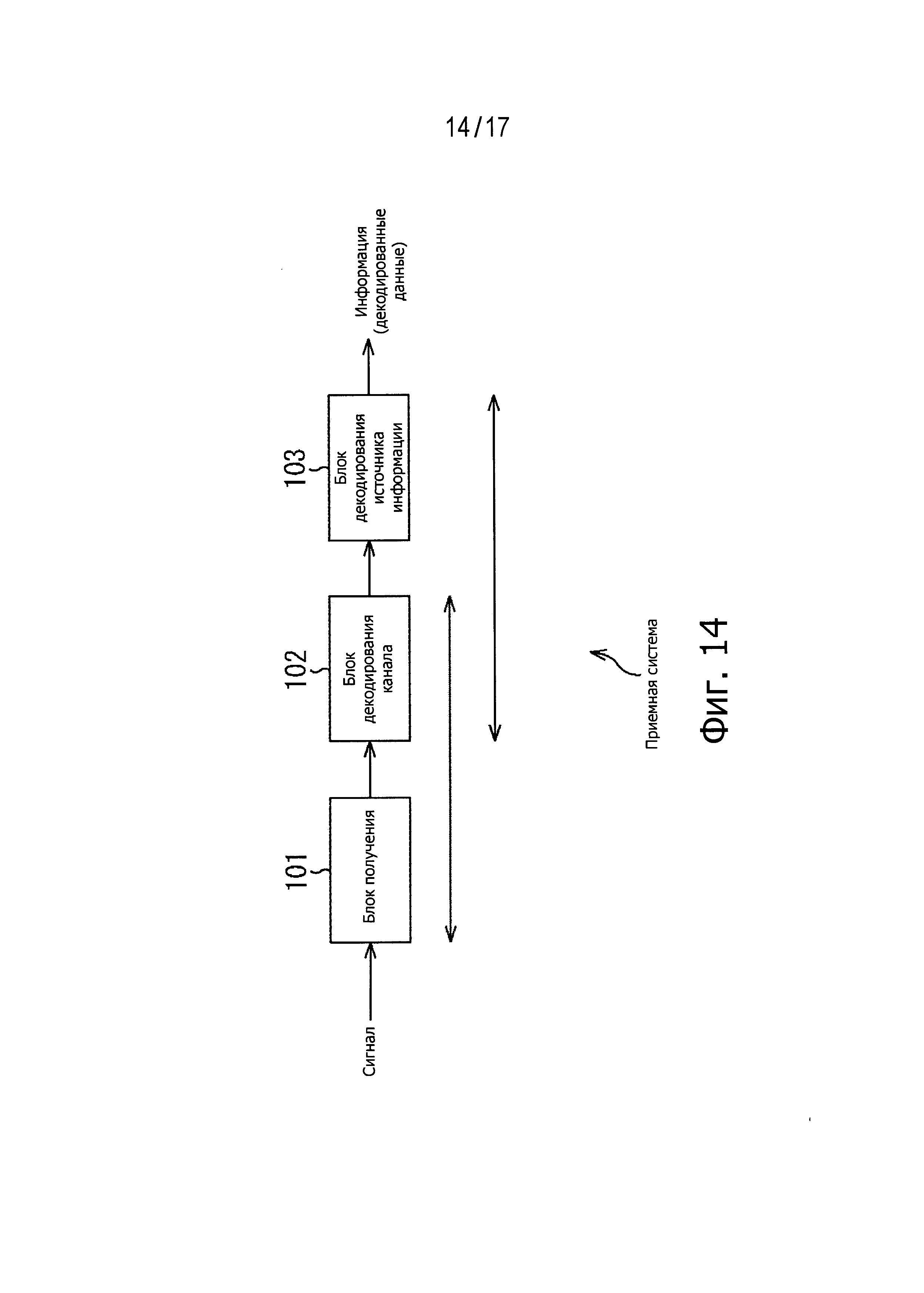
Фиг.14 является блок-схемой, на которой показан пример первого варианта осуществления приемной системы.
Фиг.15 является блок-схемой, на которой показан пример второго варианта осуществления приемной системы.
Фиг.16 является блок-схемой, на которой показан пример третьего варианта осуществления приемной системы.
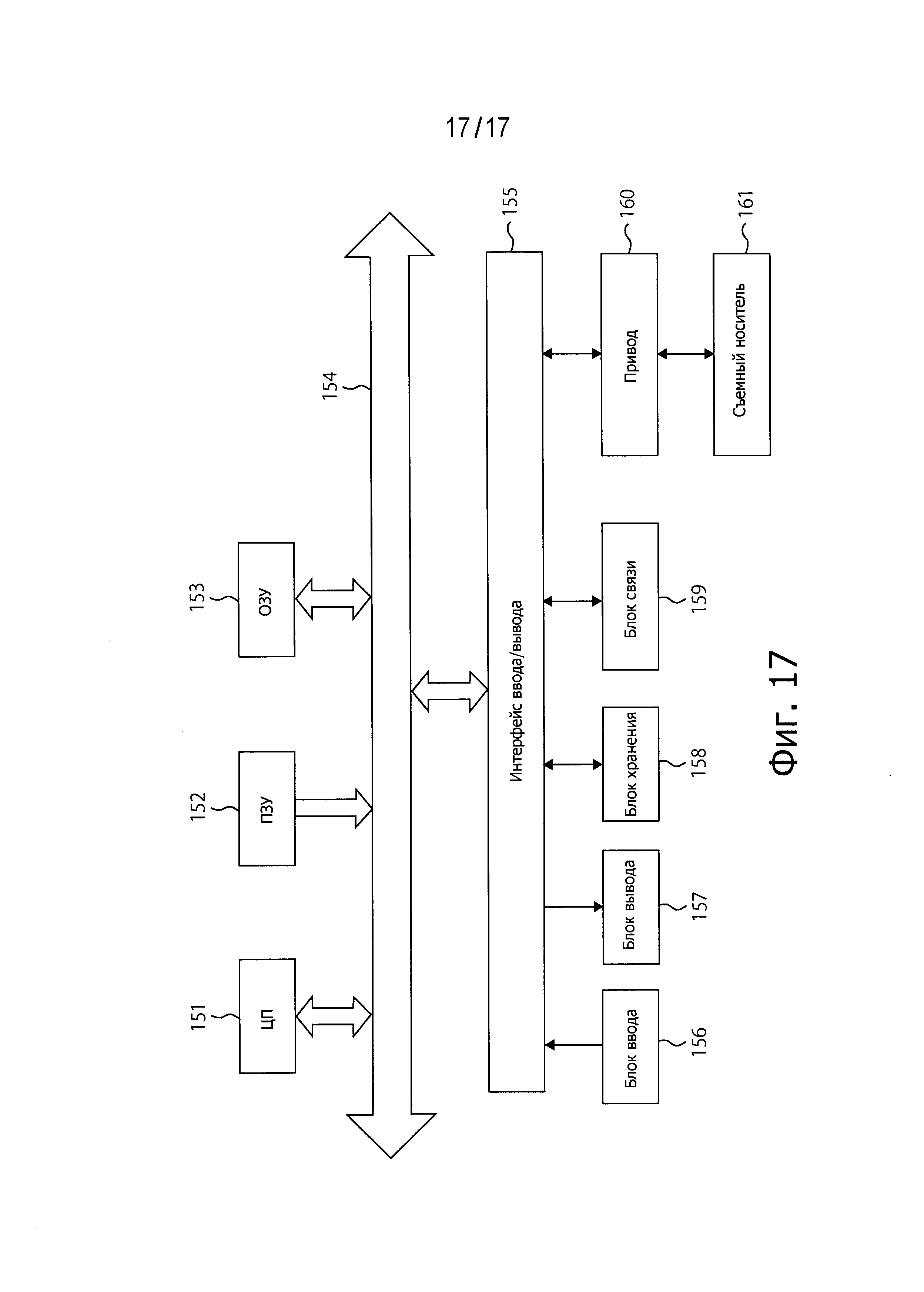
Фиг.17 является блок-схемой, показывающей пример аппаратной структуры компьютера.
Осуществление изобретения
Далее приведено описание вариантов осуществления для реализации настоящей технологии. Объяснение будет сделано в следующем порядке.
Первый вариант осуществления (пример реализации высокоскоростной установки синхронизации)
Второй вариант осуществления (пример реализации высокоскоростной установки синхронизации и улучшенная эффективность синхронизации)
Первый вариант осуществления
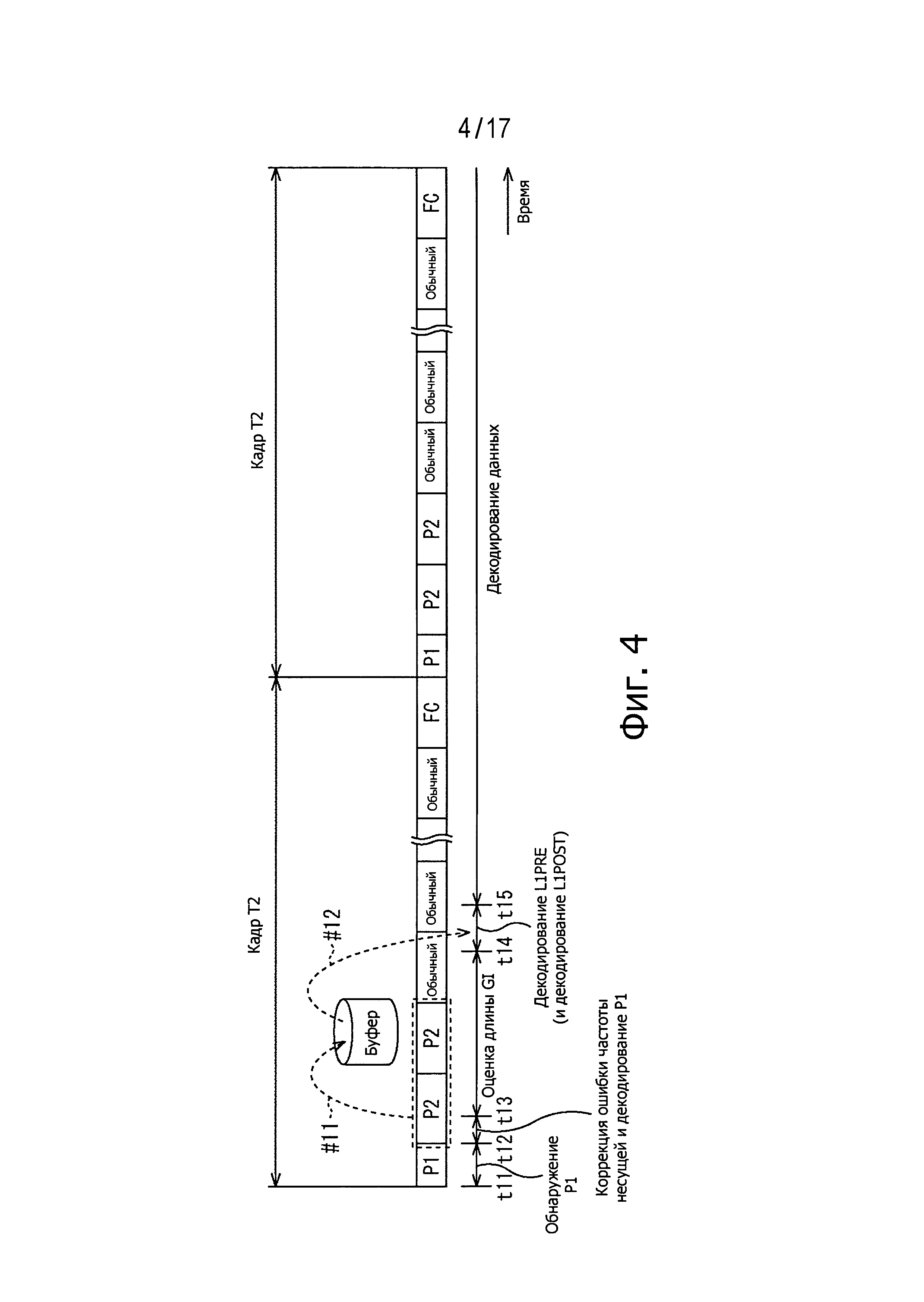
Фиг.4 является диаграммой для пояснения последовательности синхронизации в приемном устройстве согласно варианту осуществления настоящей технологии.
Приемное устройство обнаруживает в начале операции символ Р1. В примере, проиллюстрированном на фиг.4, символ Р1 обнаруживают в период между временем t11 и временем t12.
Во время t12 после обнаружения символа Р1 приемное устройство начинает накопление данных, эквивалентных символам Р2 сразу после символа Р1, в буфере, как это указано стрелкой #11. В то же самое время, что и накопление данных в буфере, приемное устройство также корректирует ошибку частоты несущей и декодирует сигнализацию Р1, как и в последовательности синхронизации в соответствии с IG.
А именно, приемное устройство оценивает ошибку частоты несущей. Для сигнала символа Р1 приемное устройство корректирует так называемую ″Точную″ ошибку частоты несущей, которая меньше интервала несущей, и корректирует так называемую ″Грубую″ ошибку частоты несущей, которая равна интервалу несущей. После корректировки ошибки частоты несущей приемное устройство декодирует Сигнализацию Р1, имеющую скорректированную ошибку частоты несущей. В примере, проиллюстрированном на фиг.4, в то же самое время, что и при накоплении данных в буфере, коррекцию ошибки частоты несущей и декодирование Сигнализации Р1 выполняют в период между временем t12 и временем t13.
После декодирования Сигнализации Р1 приемное устройство определяет количество данных, эквивалентных символам Р2, на основе размера FFT, распознанного из декодированной сигнализации Р1. Способ определения количества Р2 для записи, представляющего количество данных, эквивалентных символам Р2, будет описан позже. При накоплении количества данных для записи Р2 данных в буфере, приемное устройство прекращает накопление данных в буфере.
После декодирования Сигнализации Р1 в то же самое время, что и накопление данных в буфере, приемное устройство оценивает длину GI, используя оставшиеся символы. В примере, проиллюстрированном на фиг.4, оценку длины GI выполняют в период между временем t13 и временем t14.
Во время, когда завершена оценка длины GI, приемное устройство считывает данные, накопленные в буфере, как это указано стрелкой #12. Как будет подробно описано позже, величину считывания Р2, представляющую количество считываемых данных, определяют, используя оцененную длину GI.
Приемное устройство выполняет коррекцию ошибки частоты несущей для сигнала символа Р2, который является данными, считанными из буфера, и выполняет операцию FFT и выравнивание. Приемное устройство также декодирует L1PRE и L1POST из выровненного сигнала символа Р2. В примере, проиллюстрированном на фиг.4, декодирование L1PRE и L1POST выполняют в период между временем t14 и временем t15.
При успешном декодировании L1PRE и L1POST приемное устройство начинает демодуляцию символов данных после времени t15, когда декодирование L1PRE и L1POST завершено, используя информацию, содержащуюся в декодированных L1PRE и L1POST. В случае сбоя при декодировании L1PRE и L1POST приемное устройство выполняет те же операции, что и описанные выше, для следующего кадра Т2.
Соответственно, не ожидая следующего кадра Т2, приемное устройство может декодировать L1PRE и L1POST на основе данных, накопленных в буфере, и начать демодуляцию символов данных, содержащихся в первом кадре Т2. То есть может быть реализована высокоскоростная синхронизация.
Структура приемного устройства
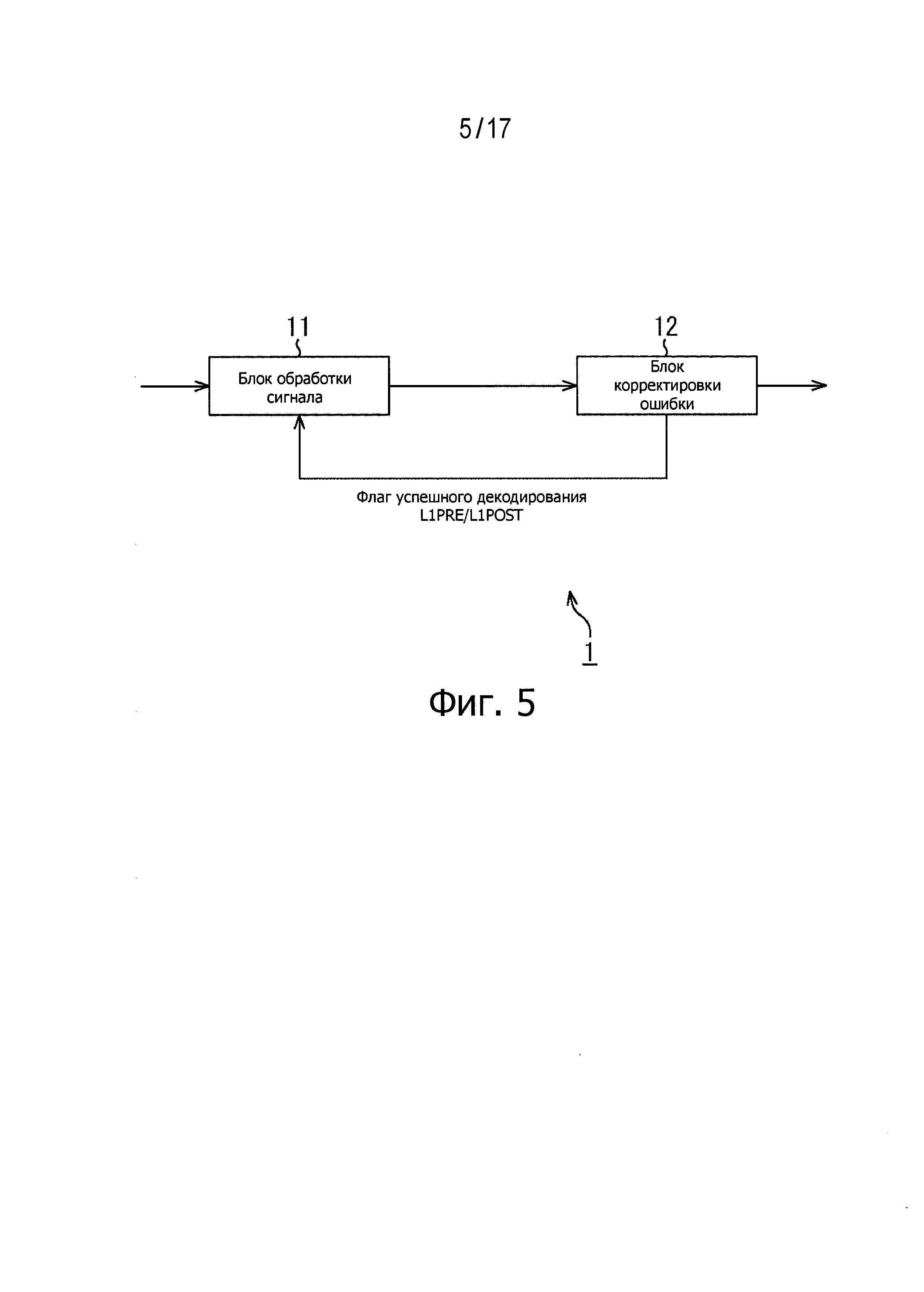
Фиг.5 является блок схемой, на которой показано приемное устройство согласно варианту осуществления настоящей технологии.
Приемное устройство 1, показанное на фиг.5, образовано блоком 11 обработки сигнала и блоком 12 корректировки ошибки. Сигнал OFDM, совместимый с DVB-T2 и полученный посредством выполнения цифро-аналогового преобразования и ортогональной демодуляции принятого сигнала, вводят в блок 11 обработки сигнала. Сигнал OFDM, который вводят в блок 11 обработки сигнала, является демодулированным сигналом во временной области до операции FFT, и содержит компоненту действительной оси (компоненту I) и компоненту мнимой оси (компоненту Q).
Блок 11 обработки сигнала устанавливает синхронизацию выполнением операций в соответствии с последовательностью синхронизации, описанной со ссылкой на фиг.4. Блок 11 обработки сигнала выполняет операции, такие как корректировка ошибки частоты несущей, операцию FFT для скорректированного сигнала OFDM, и выравнивание сигнала OFDM в диапазоне частот, полученного посредством операции FFT. Блок 11 обработки сигнала выводит выровненный сигнал OFDM на блок 12 корректировки ошибки.
Блок 12 корректировки ошибки выполняет корректировку ошибки декодирования выровненного сигнала OFDM, подаваемого от блока 11 обработки сигнала. При успешном декодировании L1PRE и L1POST, передаваемых через символы Р2, блок 12 корректировки ошибки выводит флаг успешного декодирования L1PRE/L1POST, который указывает на успешное декодирование L1PRE и L1POST, на блок 11 обработки сигнала.
В нижеследующем описании ″демодуляция″ означает операции, заканчивая выравниванием, выполняемые блоком 11 обработки сигнала, и ″декодирование″ означает корректировку ошибки декодирования, выполняемую блоком 12 корректировки ошибки, исключая декодирование Сигнализации P1.
Фиг.6 является блок-схемой, на которой показан пример структуры блока 11 обработки сигнала.
Блок 11 обработки сигнала включает в себя блок 21 выбора сигнала, блок 22 корректировки ошибки частоты несущей, блок 23 оценки ошибки частоты несущей/обработки Р1, блок 24 синхронизации символа, блок 25 выполнения операции FFT, блок 26 поиска центральной позиции фильтра/интервала FFT, блок 27 выравнивания, блок 28 оценки GI, буфер 29 и блок 30 управления буфером. Временную область сигнала OFDM вводят в блок 21 выбора сигнала и буфер 29.
В начале операции демодуляции блок 21 выбора сигнала выбирает временную область сигнала OFDM (сигнал А), который вводят извне блока 11 обработки сигнала, и выводит временную область сигнала OFDM на блок 22 корректировки частоты несущей.
В случае когда флаг выбора сигнала, указывающий выбор подачи временной области сигнала OFDM, считанного из буфера 29, блок 21 выбора выбирает временную область сигнала OFDM (сигнал В), считанного из буфера 29, и выводит временную область сигнала OFDM на блок 22 корректировки ошибки частоты несущей. Флаг выбора сигнала, указывающий на выбор временной области сигнала OFDM, считанного из буфера 29, подают от блока 30 управления буфером, когда оценка длины GI с использованием символов, содержащихся в первом кадре Т2, завершена.
В соответствии величиной ошибки частоты несущей, оцененной блоком 23 оценки ошибки частоты несущей/обработки Р1, блок корректировки ошибки частоты несущей 22 корректирует ошибку частоты несущей, содержащейся во временной области сигнала OFDM, подаваемого от блока 21 выбора сигнала. Скорректированную временную область сигнала OFDM, выведенную блоком 22 корректировки ошибки частоты несущей, подают на блок 23 оценки ошибки частоты несущей/обработки Р1, блок 25 выполнения операции FFT и блок 28 оценки GI.
Блок 23 оценки ошибки частоты несущей/обработки Р1 обнаруживает символ Р1 из временной области сигнала OFDM подаваемой от блока 22 корректировки ошибки частоты несущей. Когда обнаружен символ Р1, блок 23 оценки ошибки частоты несущей/обработки Р1 выводит флаг обнаружения Р1, указывающий позицию символа Р1, в блок 24 синхронизации и блок 30 управления буфером. Блок 23 оценки ошибки частоты несущей/обработки Р1 также декодирует Сигнализацию Р1 и выводит информацию о размере FFT, содержащуюся в Сигнализации Р1, на блок 25 выполнения операции FFT и блок 30 управления буфером.
Блок 23 оценки ошибки частоты несущей/обработки Р1 оценивает ошибку частоты несущей на основе временной области сигнала OFDM, подаваемого от блока 22 корректировки ошибки частоты несущей. Например, блок 23 оценки ошибки частоты несущей/обработки Р1 определяет автокорреляцию, которая является средним значением произведения временной области сигнала OFDM, поданного от блока 22 корректировки ошибки частоты несущей, и задержанного сигнала, сгенерированного задержкой временной области сигнала OFDM на длину эффективного сигнала во время заданного периода времени. Автокорреляция, определенная подобным образом, имеет пиковое значение на границе между символами OFDM.
Фаза автокорреляции имеет пиковое значение равное 0, в случае когда частота несущих, которые будут использованы в цифровой ортогональной демодуляции, является точно такой же, что и центральная частота сигнала OFDM (принятого сигнала OFDM), подвергаемого цифровой ортогональной демодуляции. Однако в случае когда частота несущих, которые будут использованы в цифровой ортогональной демодуляции, отличается от центральной частоты сигнала OFDM, подвергаемого цифровой ортогональной демодуляции, фазу автокорреляции, имеющую пиковое значение, поворачивают на величину, эквивалентную различию.
Ввиду вышесказанного фаза автокорреляции, имеющая пиковое значение, представляет собой разницу между частотой несущих, используемую при цифровой ортогональной демодуляции, и центральной частотой сигнала OFDM, подвергаемого цифровой ортогональной демодуляции. Блок 23 оценки ошибки частоты несущей/обработки Р1 оценивает ошибку частоты несущей на основе фазы автокорреляции, имеющей пиковое значение, и выводит величину ошибки частоты несущей на блок 22 корректировки ошибки частоты несущей.
До установки синхронизации блок 24 синхронизации символа определяет начало эффективных символов в позиции, которая расположена впереди позиции, представляющей флаг обнаружения Р1, подаваемый от блока 23 оценки ошибки частоты несущей/обработки Р1, на длину GI, оцененную блоком 28 оценки GI. Блок 24 синхронизации символа устанавливает начало эффективных символов как начальную позицию операции, выполняемую для символов, и выводит триггер Окна FFT, указывающий данную позицию, на блок 25 выполнения операции FFT. Как было описано выше, когда синхронизация установлена, то декодирование L1PRE и L1POST завершено, и символы данных могут быть демодулированы.
После установки синхронизации блок 24 синхронизации символа определяет начальную позицию интервала FFT, подвергаемого операции FFT, для сигнала каждого символа на основе позиции, указанной флагом обнаружения Р1, подаваемого от блока 23 оценки ошибки частоты несущей/обработки Р1. Информацию, такую как длина GI, содержащуюся в L1PRE, декодированную блоком 12 корректировки ошибки, подают на блок 24 синхронизации символа через цепь (не показана), и используют при определении начальной позиции интервала FFT. Блок 24 синхронизации символа выводит триггер Окна FFT, указывающий определенную позицию, на блок 25 выполнения операции FFT. Когда это уместно, блок 24 синхронизации символа выводит триггер Окна FFT, указывающий начальную позицию, определенную блоком 26 поиска центральной позиции фильтра/интервала FFT, на блок 25 выполнения операции FFT.
Блок 25 выполнения операции FFT выполняет операцию FFT для временной области сигнала OFDM, подаваемого от блока 22 корректировки ошибки частоты несущей. Интервал FFT, подвергаемый операции FFT, определяют, например, на основе триггера Окна FFT, подаваемого от блока 24 синхронизации символа и размера FFT, распознанного блоком 23 оценки ошибки частоты несущей/обработки Р1 на основе Сигнализации Р1. Блок 25 выполнения операции выводит сигнал OFDM частотного диапазона, полученного посредством операции FFT, на блок 26 поиска центральной позиции фильтра/интервала FFT на блок 27 выравнивания.
На основе частотного диапазона сигнала OFDM, подаваемого от блока 25 выполнения операции, блок 26 поиска центральной позиции фильтра/интервала FFT ищет интервал FFT и выводит информацию об интервале FFT, определенного поиском, на блок 24 синхронизации символа. Блок 26 поиска центральной позиции фильтра/интервала FFT также ищет центральную позицию полосы пропускания фильтра для фильтра интерполяции, используемой блоком 27 выравнивания, и выводит информацию о центральной позиции, определенной при поиске, на блок 27 выравнивания.
Например, блок 26 поиска центральной позиции фильтра/интервала FFT выполняет выравнивание частотного диапазона сигнала OFDM так же, как и блок 27 выравнивания, и обнаруживает качество сигнала после выравнивания. Если обнаруженное качество сигнала больше или равно пороговому значению, блок 26 поиска центральной позиции фильтра/интервала FFT определяет центральную позицию фильтра интерполяции, используемую при выравнивании, как оптимальную центральную позицию, и определяет текущий установленный интервал FFT как оптимальный интервал FFT.
С другой стороны, если обнаруженное качество сигнала меньше порогового значения, блок 26 поиска центральной позиции фильтра/интервала FFT устанавливает новый интервал, отличающийся от текущего установленного интервала, и выводит информацию на блок 24 синхронизации символа для отдачи команды блоку 25 выполнения операции FFT на выполнение операции FFT. В соответствии с измененной центральной позицией фильтра интерполяции блок 26 поиска центральной позиции фильтра/интервала FFT также выполняет выравнивание для частотного диапазона сигнала OFDM, полученного посредством операции FFT, выполненной для нового интервала FFT, и обнаруживает качество сигнала после выравнивания. Повторно выполняя вышеприведенную операцию, блок 26 поиска центральной позиции фильтра/интервала FFT определяет оптимальный интервал FFT и оптимальную центральную позицию полосы пропускания фильтра для фильтра интерполяции.
Поиск интервала FFT и поиск центральной позицию полосы пропускания фильтра для фильтра интерполяции, используемых для выравнивания, раскрыты, например, в выложенных заявках на патент Японии №2009-232439 и 2010-74578.
Блок 27 выравнивания выполняет выравнивание частотного диапазона сигнала OFDM, подаваемого от блока 25 выполнения операции FFT. Например, блок 27 выравнивания извлекает SP (рассеянный пилот-сигнал) из частотного диапазона сигнала OFDM, и оценивает характеристики поднесущей в местоположении сигнала SP. Блок 27 выравнивания оценивает характеристики канала каждой несущей сигнала OFDM, выполняя интерполяцию оцененных характеристик канала во временном направлении и частотном направлении. Центральную позицию, определенную блок 26 поиска центральной позиции фильтра/интервала FFT, используют как центральную позицию полосы пропускания фильтра в фильтре интерполяции, используемого при интерполяции, выполняемой для характеристик канала в частотном направлении.
На основе оцененных характеристик канала блок 27 выравнивания корректирует ошибки амплитуды и фазы, содержащиеся в частотной области сигнала OFDM, и выполняет выравнивание.
До установки синхронизации блок 28 оценки GI оценивает длину GI на основе временной области сигнала OFDM, подаваемого от блока 22 корректировки ошибки частоты несущей. Например, блок 28 оценки GI определяет значение корреляции между частью последующей половины эффективного символа, используемой как исходный GI, и каждой компонентой символа GI, и обнаруживает участок с большим значением корреляции как GI. Блок 28 оценки GI выводит информацию о длине GI, указывающей длину GI, на блок 24 синхронизации символа и блок 30 управления буфером.
Когда флаг начала записи Р2 подают от блока 30 управления буфером, буфер 29 начинает накапливать сигнал OFDM временной области, который является данными символов Р2 и вводимыми извне блока 11 обработки сигнала. Буфер 29 продолжает накапливать временную область сигнала OFDM до тех пор, пока не будет накоплено количество данных, эквивалентное величине записи Р2, подаваемых от блока 30 управления буфером после подачи флага начала записи Р2.
Когда флаг начала считывания Р2 подают от блока 30 управления буфером, буфер 29 начинает считывание накопленного сигнала OFDM временной области и выводит сигнал OFDM временной области на блок 21 выбора сигнала. Буфер 29 продолжает считывать и выводить сигнал OFDM временной области до тех пор, пока не будет выведено количество данных, эквивалентное величине записи Р2, подаваемой вместе с флагом считывания Р2, от блока 30 управления буфером.
Когда флаг обнаружения Р1 подают от блока 23 оценки ошибки частоты несущей/обработки Р1, блок 30 управления буфером выводит флаг начала записи Р2 в буфер 29.
Когда декодирование Сигнализации Р1 завершено в блоке 23 оценки ошибки частоты несущей/обработки Р1, и подана информация о размере FFT, блок 30 управления буфером определяет величину записи Р2 в соответствии со следующим уравнением (1).

В случае примера, проиллюстрированного на фиг.4, количество символов Р2 равно двум. Размер FFT в уравнении (1) является размером FFT, распознанным блоком 23 оценки ошибки частоты несущей/обработки Р1 из Сигнализации Р1. Максимальная длина GI в уравнении (1) является наибольшей возможной длиной GI.
В соответствии с DVB-T2, если способом передачи является SISO, максимальная длина GI равна 19/128, когда размер FFT равен 32 К, и максимальная длина GI равна 1/4, когда размер FFT равен 16 К, 8 К, 4 К, 2 К или 1 К. В соответствии с данным способом, наибольшую возможную длину GI указывают в соответствии с размером FFT. Если способом передачи является MISO, максимальная длина GI равна 19/256, когда размер FFT равен 32 К, максимальная длина GI равна 19/128, когда размер FFT равен 16 К или 8 К, и максимальная длина GI равна 1/8, когда размер FFT равен 4 К или 1 К.
Поскольку длина GI по-прежнему неизвестна даже после завершения декодирования Сигнализации Р1, блок 30 управления буфером определяет величину записи Р2 на основе предположения, что длина GI символов Р2 равна максимальной длине GI. Например, в случае когда 32 К распознано блоком 23 оценки ошибки частоты несущей/обработки Р1 как размер FFT, блок 30 управления использует 19/128 как длину GI, и определяет величину записи Р2 на основе уравнения (1).
Когда максимальная длина GI или наибольшее возможное количество данных как величина данных символов Р2 оценена вышеприведенным способом, по меньшей мере данные символов Р2 сохраняют в буфере 29 независимо от фактической длины GI, распознанной из L1PRE. Блок 30 управления буфером выводит информацию о величине записи Р2, определенную вышеприведенным способом, в буфер 29.
Когда информацию о длине подают от блока 28 оценки GI, блок 30 управления буфером 30 определяет величину считывания Р2 в соответствии в нижеследующим уравнением (2).


Размер FFT в уравнении (2) является размером FFT, распознанным блоком 23 оценки ошибки частоты несущей/обработки Р1 из Сигнализации PL Длина GI в уравнении (2) является длиной GI, оцененной блоком 28 оценки GI. Блок 30 управления буфером выводит информацию о величине считывания Р2, определенной вышеуказанным способом, вместе с флагом начала считывания Р2, в буфер 29.
Когда информацию о длине GI подают от блока 28 оценки GI, блок 30 управления буфером выводит флаг выбора сигнала, указывающий выбор временной области сигнала OFDM, который считан из буфера 29. Когда флаг успешного декодирования L1PRE/L1POST подают от блока 12 корректирования ошибки, блок 30 управления буфером выводит в блок 21 выбора сигнала флаг выбора сигнала, указывающий выбор временной области сигнала OFDM, введенного извне.
Операции в приемном устройстве
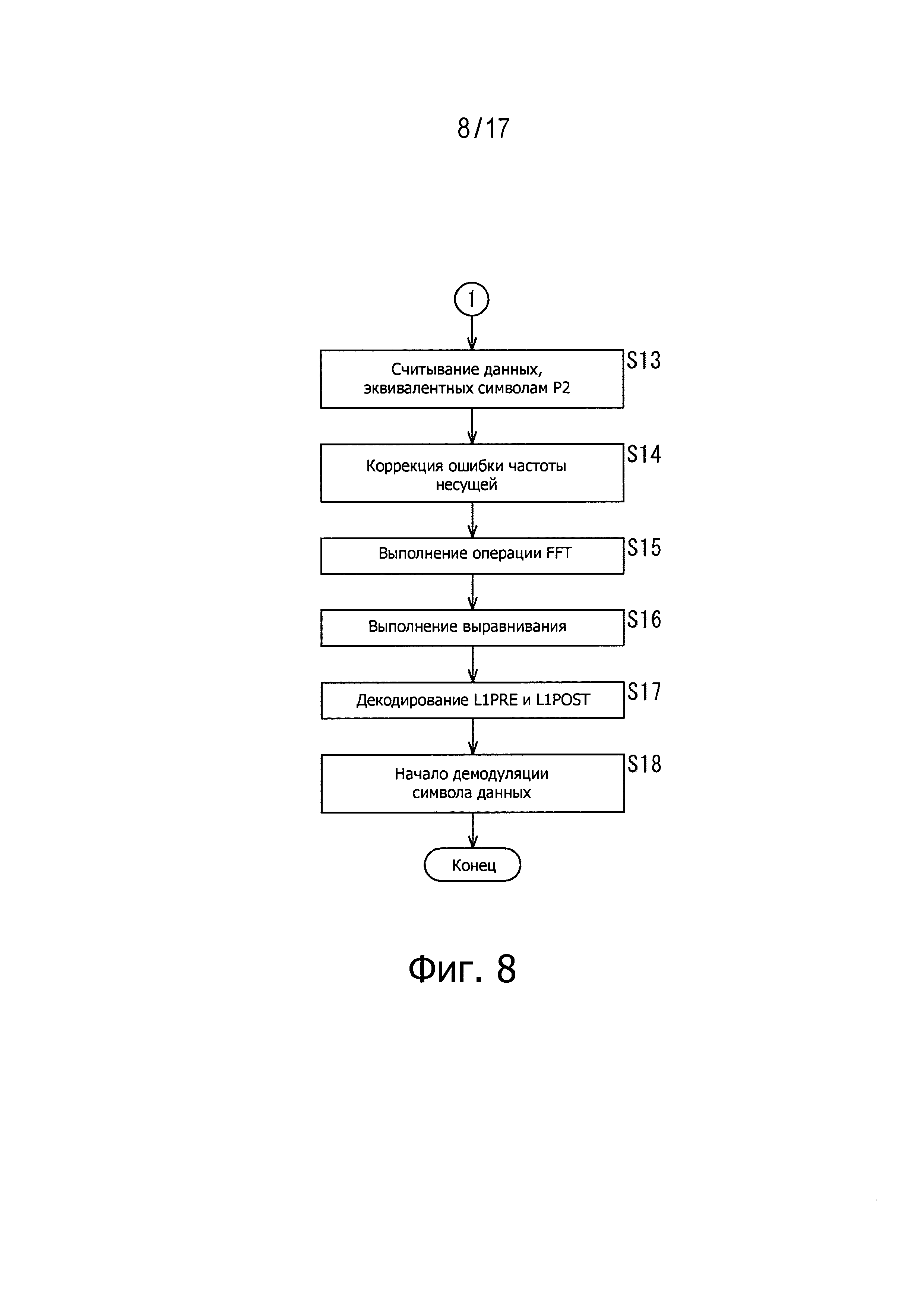
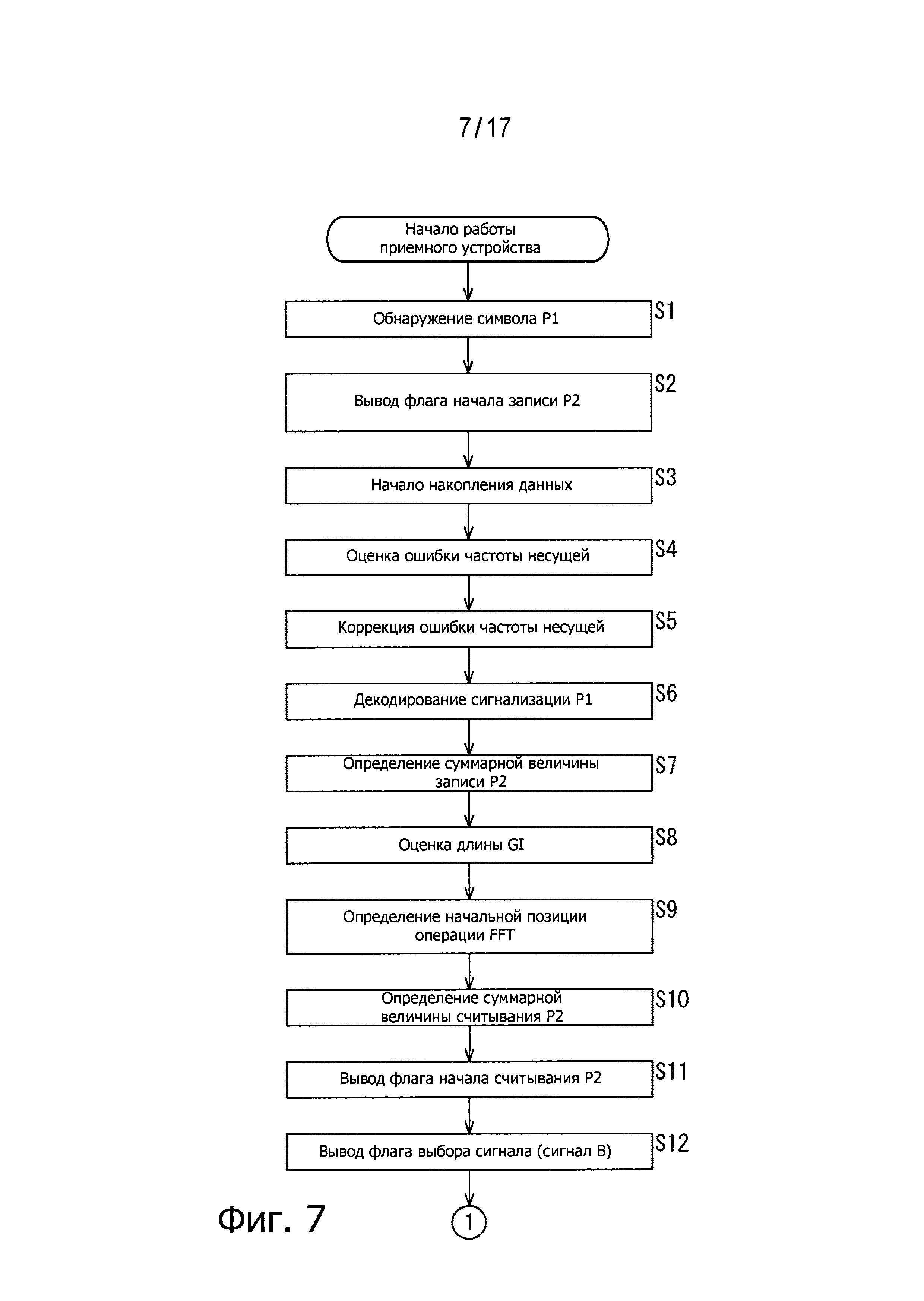
В дальнейшем ссылки будут даны на фиг.7 и 8, и будут описаны операции, выполняемые приемным устройством 1. Операцию на каждом этапе выполняют параллельно с операцией на другом этапе, или выполняют до или после операции на другом этапе, когда это уместно.
Операции начинаются, когда временную область сигнала OFDM первого кадра Т2 после начала операции демодуляции, вводят в блок 11 обработки сигнала. В начале операции демодуляции блок 21 выбора сигнала выбирает вводимый временную область сигнала OFDM. Временную область сигнала OFDM, выбранного блоком 21 выбора сигнала, подают на блок 23 оценки ошибки частоты несущей/обработки Р1 через блок 22 корректировки ошибки частоты несущей.
На этапе S1 блок 23 оценки ошибки частоты несущей/обработки Р1 обнаруживает символ Р1 во временной области сигнала OFDM и выводит флаг обнаружения P1.
На этапе S2 блок 30 управления буфером, в ответ на поданный флаг обнаружения Р1, выводит в буфер 29 флаг начала записи Р2.
На этапе S3 буфер 29 начинает накапливать сигнал OFDM временной области, вводимый извне.
На этапе S4 блок 23 оценки ошибки частоты несущей/обработки Р1 оценивает ошибку частоты несущей на основе сигнала OFDM временной области, и выводит величину ошибки частоты несущей на блок 22 корректировки ошибки частоты несущей.
На этапе S5 блок 22 корректирования ошибки частоты несущей корректирует ошибку частоты несущей, содержащейся в сигнале OFDM временной области, в соответствии с величиной ошибки частоты несущей, подаваемой от блока 23 оценки ошибки частоты несущей/обработки Р1.
На этапе S6 блок 23 оценки ошибки частоты несущей/обработки Р1 декодирует Сигнализацию Р1 из обнаруженного символа Р1 первого кадра Т2 и выводит информацию о размере FFT.
На этапе S7 блок 30 управления буфером определяет величину записи Р2 в соответствии с уравнением (1), используя размер FFT, распознанный блоком 23 оценки ошибки частоты несущей/обработки Р1, и выводит величину записи Р2 в буфер 29. Накопление сигнала OFDM временной области буфером 29 продолжается, пока количество данных, эквивалентное величине записи Р2, не будет накоплено.
На этапе S8 блок 30 оценки GI оценивает длину GI на основе сигнала OFDM временной области, подаваемого от блока 22 корректировки ошибки частоты несущей.
На этапе S9 блок 24 синхронизации символа определяет начальную позицию операции FFT для сигнала символа Р2 на основе позиции символа Р1, обнаруженной блоком 23 оценки ошибки частоты несущей/обработки Р1, и длины GI, оцененной блоком 28 оценки GI. Блок 24 синхронизации символа выводит триггер Окна FFT, указывающий начальную позицию операции FFT, на блок 25 выполнения операции FFT.
На этапе S10 на основе размера FFT, распознанного блоком 23 оценки ошибки частоты несущей/обработки Р1, и длины GI, оцененной блоком 28 оценки GI, блок 30 управления буфером определяет величину считывания Р2 в соответствии с уравнением (2).
На этапе S11 блок 30 управления буфером выводит информацию о величине считывания Р2 вместе с флагом начала считывания Р2 в буфер 29.
На этапе S12 блок 30 управления буфером выводит флаг выбора сигнала, указывающий выбор временной области сигнала OFDM, считываемого из буфера 29, на блок 21 выбора сигнала.
На этапе S13 буфер 29 начинает считывать накопленный сигнал OFDM временной области. Считывание сигнала OFDM временной области из буфера 29 продолжается пока сигнал OFDM, эквивалентный величине считывания Р2, не будет считан. Сигнал символа Р2, который является сигналом OFDM временной области, выбранного блоком 21 выбора сигнала, считывают из буфера 29, и подают на блок 22 корректировки ошибки частоты несущей.
На этапе S14 блок 22 корректировки ошибки частоты несущей корректирует ошибку частоты несущей, содержащуюся в сигнале символа Р2, считанного из буфера 29.
На этапе S15 блок 25 выполнения операции FFT выполняет операцию FFT для сигнала символа Р2 со скорректированной ошибкой частоты несущей и выводит сигнал символа Р2 частотной области.
На этапе S16 блок 27 выравнивания выполняет выравнивание сигнала символа, подаваемого от блока 25 выполнения операции FFT.
На этапе S17 блок 12 корректировки ошибки декодирует L1PRE и L1POST из выровненного сигнала символа Р2. При успешном декодировании L1PRE и L1POST, блок 12 корректировки ошибки выводит флаг успешного декодирования L1PRE и L1POST. Флаг успешного декодирования L1PRE и L1POST вводят в блок 30 управления буфером.
На этапе S18 блок 11 обработки сигнала начинает демодуляцию символов данных, содержащихся в первом кадре Т2, с использованием информации, полученной при декодировании L1PRE и L1POST. А именно, в соответствии с флагом выбора сигнала, подаваемого от блока 30 управления буфером, блок 21 выбора сигнала выбирает сигнал символа данных, который вводят извне. Блок 22 корректировки ошибки частоты несущей корректирует ошибку частоты несущей, содержащейся в сигнале символа данных, выбранного блоком 21 выбора сигнала.
Блок 24 синхронизации символа определяет начальную позицию интервала FFT на основе, например, позиции обнаруженного символа Р1 и длины GI, распознанных из L1PRE, и выводит триггер Окна FFT на блок 25 выполнения операции FFT. Блок 25 выполнения операции FFT устанавливает интервал FFT, начиная с начальной позиции, определенной блоком 24 синхронизации символа. Интервал FFT имеет размер FFT, распознанный из Сигнализации Р1. Затем блок 25 выполнения операции выполняет операцию FFT для символа данных, поданного от блока 22 корректировки ошибки частоты несущей. Блок 27 выравнивания выполняет выравнивание частотной области сигнала символа данных, полученного при выполнении операции FFT. Блок 12 корректировки ошибки декодирует данные на основе выровненного сигнала символа данных. Например по меньшей мере один из блока 25 выполнения операции FFT, блока 27 выравнивания и блока 12 корректировки ошибки образуют блок обработки, который обрабатывает символы данных, содержащиеся в кадре Т2, который содержит символы Р2, накопленные в буфере 29.
При вышеописанных операциях синхронизация может быть быстро установлена и демодуляция может быть начата с символов данных, содержащихся в первом кадре Т2.
В приведенном выше описании демодуляцию начинают с символа данных, имеющего декодированные L1PRE и L1POST из символов данных в первом кадре Т2. Однако данные первого символа данных в кадре и символы, передаваемые до завершения декодирования L1PRE и L1POST, могут быть накоплены в буфере 29, и накопленные данные могут быть считаны из буфера 29 при завершении декодирования L1PRE и L1POST, так что демодуляция может быть начата с первого символа данных.
В этом случае данные первого символа данных и второго символа данных, содержащиеся в первом кадре Т2, накоплены в буфере 29, как это проиллюстрировано на фиг.4. После времени t15, в которое завершено декодирование L1PRE и L1POST, данные последовательно считывают из буфера 29 и демодуляцию начинают с первого символа данных. Несмотря на то, что емкость буфера 29 должна быть сделана большой, в данной компоновке демодуляция может быть начата с первого символа данных, содержащимся в кадре Т2.
В случае когда спектральная инверсия может быть обнаружена в то же время, что и оценка ошибки несущей, спектральная инверсия также может быть скорректирована при корректировке ошибки частоты несущей. Таким образом, даже в случае возникновения спектральной инверсии синхронизация может быть установлена с тем же самым временным соотношением, что и при отсутствии спектральной инверсии.
Второй вариант осуществления
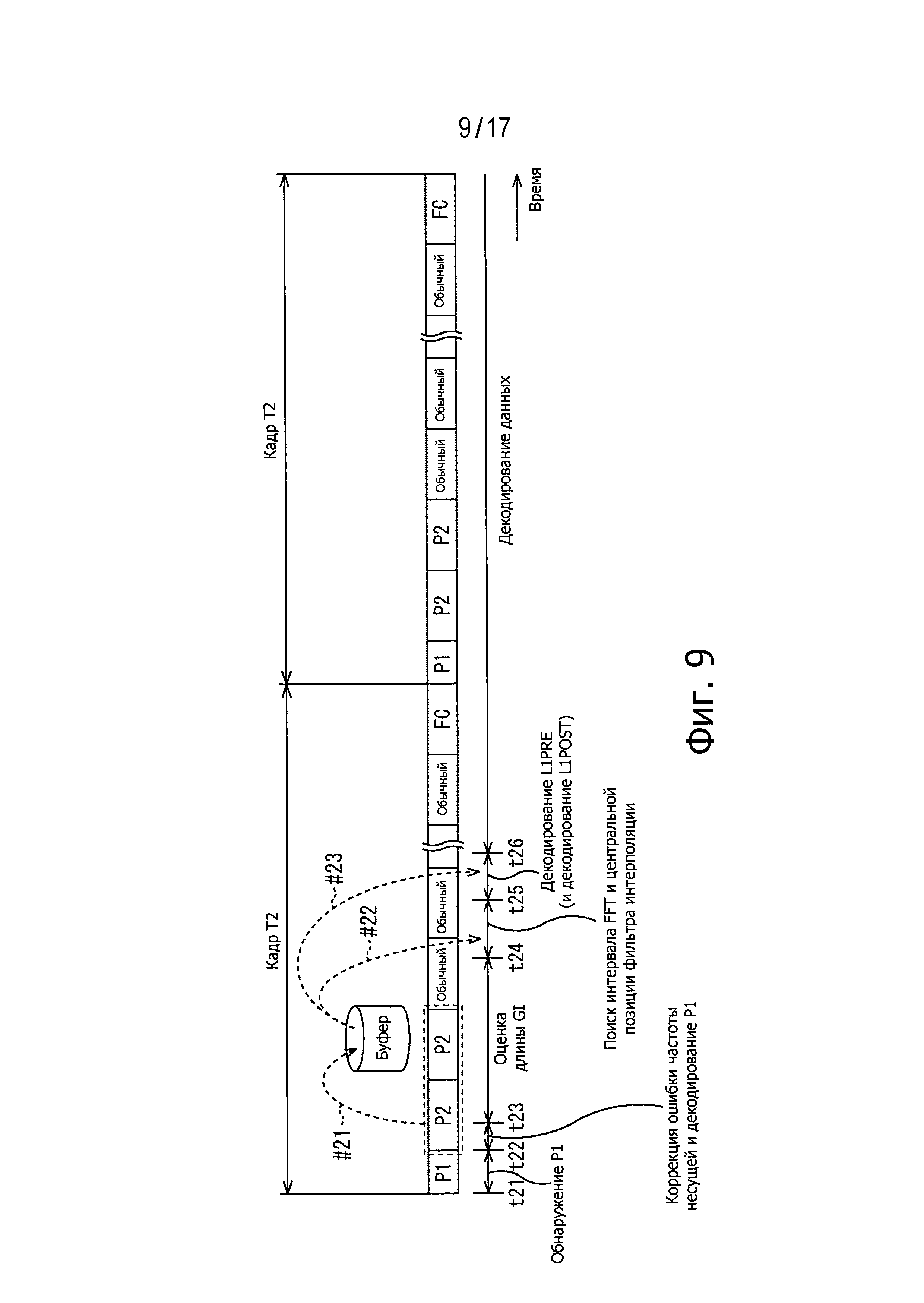
Фиг.9 является диаграммой для пояснения другой последовательности операций синхронизации, выполняемых приемным устройством 1. Повторное описание тех же самых операций, которые были описаны со ссылкой на фиг.4, будет опущено.
Приемное устройство 1 обнаруживает символ Р1 в начале операции. В примере, проиллюстрированном на фиг.9, символ Р1 обнаруживают в период между временем t21 и временем t22.
Во время t22 после обнаружения символа Р1 приемное устройство 1 начинает накапливать в буфере 29 данные, эквивалентные символам Р2, непосредственно следующими за символом Р1, как это указано стрелкой #21. В то же самое время, что и накопление данных в буфере 29, приемное устройство 1 также корректирует ошибку частоты несущей и декодирует сигнализацию Р1. В примере, проиллюстрированном на фиг.9, в то же время, что и выполнение операции накопления данных в буфере 29, выполняют коррекцию ошибки частоты несущей и декодирование Сигнализации Р1 в период между временем t22 и временем t23.
После декодирования Сигнализации Р1 приемное устройство 1 определяет количество данных, эквивалентных символам, на основе размера FFT, распознанного при декодировании сигнализации Р1. При накоплении в буфере количества данных записи Р2, приемное устройство заканчивает накопление данных в буфере.
После декодирования Сигнализации Р1 приемное устройство 1 также оценивает во время выполнении операции накопления данных в буфере 29 длину GI с использованием оставшихся символов. В примере, проиллюстрированном на фиг.9, оценку длины GI выполняют в период между временем t23 и временем t24.
Во время t24, когда оценка GI завершена, приемное устройство 1 считывает данные символа Р2, накопленные в буфере 29, как это указано стрелкой #22. На основе сигнала символа Р2, считанного из буфера 29, приемное устройство 1 также ищет оптимальный интервал FFT и оптимальную центральную позицию полосы пропускания фильтра в фильтре интерполяции, используя выравнивание. В примере, проиллюстрированном на фиг.9, поиск оптимального интервала FFT и оптимальной центральной позиции полосы пропускания фильтра в фильтре интерполяции проводят в период между временем t24 и временем t25.
Во время t25, в которое поиск оптимального интервала FFT и оптимальной центральной позиции полосы пропускания фильтра в фильтре интерполяции завершен, приемное устройство 1 заново считывает данные символа Р2, накопленные в буфере 29, как это указано стрелкой #23.
Приемное устройство 1 выполняет коррекцию ошибки частоты несущей для сигнала символа Р2, повторно считанного из буфера 29, и выполняет операцию FFT и выравнивания. Приемное устройство 1 выполняет операцию FFT для повторно считанного сигнала символа Р2, используя оптимальный интервал FFT, определенный при поиске. Приемное устройство 1 также выполняет выравнивание повторно считанного сигнала символа Р2 (частотной области сигнала OFDM, подвергаемого операции FFT), используя оптимальную центральную позицию полосы пропускания фильтра, определенную при поиске.
То есть приемное устройство 1 выполняет операцию FFT для сигналов, находящихся в оптимальном интервале FFT для повторно считанного сигнала символа Р2. Приемное устройство 1 также оценивает характеристики канала каждой заданной поднесущей посредством извлечения сигнала SP. При выполнении интерполяции для оцененных характеристик канала в частотном направлении, приемное устройство 1 устанавливает оптимальную центральную позицию в центральной позиции полосы пропускания фильтра в фильтре интерполяции, и затем выполняет интерполяцию характеристик канала.
Приемное устройство 1 также декодирует L1PRE и L1POST из выровненного сигнала символа Р2. В примере, проиллюстрированном на фиг.9, декодирование L1PRE и L1POST выполняют в период между временем t25 и временем t26.
При успешном декодировании L1PRE и L1POST приемное устройство 1 начинает демодулирование символов данных после времени t26, в которое было завершено декодирование L1PRE и L1POST, используя информацию, содержащуюся в декодированных L1PRE и L1POST.
Соответственно, без необходимости ожидания следующего кадра Т2, L1PRE и L1POST могут быть декодированы на основе данных, накопленных в буфере 29, и может быть реализована высокоскоростная синхронизация.
Также демодуляция символа Р2 может быть выполнена с использованием оптимального интервала FFT и оптимальной центральной позиции полосы пропускания фильтра, что улучшает производительность синхронизации. При демодуляции символа OFDM, интервал FFT, подвергаемый операции FFT, и центральная позиция полосы пропускания фильтра в фильтре интерполяции, используемых при выполнении интерполяции характеристик канала являются параметрами, определяющими производительность приема.
В вышеописанной последовательности синхронизации демодуляцию символов Р2 начинают сразу после обнаружения символа Р1. То есть демодуляцию символов Р2, подлежащих демодуляции в состоянии, когда декодирована Сигнализация Р1, которая является информацией, необходимой для декодирования L1PRE.
Поиск интервала FFT и центральной позиции полосы пропускания фильтра в фильтре интерполяции обычно требует времени выполнения операции, эквивалентному нескольким символам. Следовательно, в случае когда демодуляцию символов Р2 начинают сразу после обнаружения символа Р1, такие параметры не могут быть установлены в оптимальные значения в начале демодуляции символа Р2, и производительность приема ухудшается, когда, например, присутствует интерференция многолучевого излучения. Результатом этого является неудачное декодирование L1PRE. Неудачное декодирование L1PRE означает плохую производительность синхронизации.
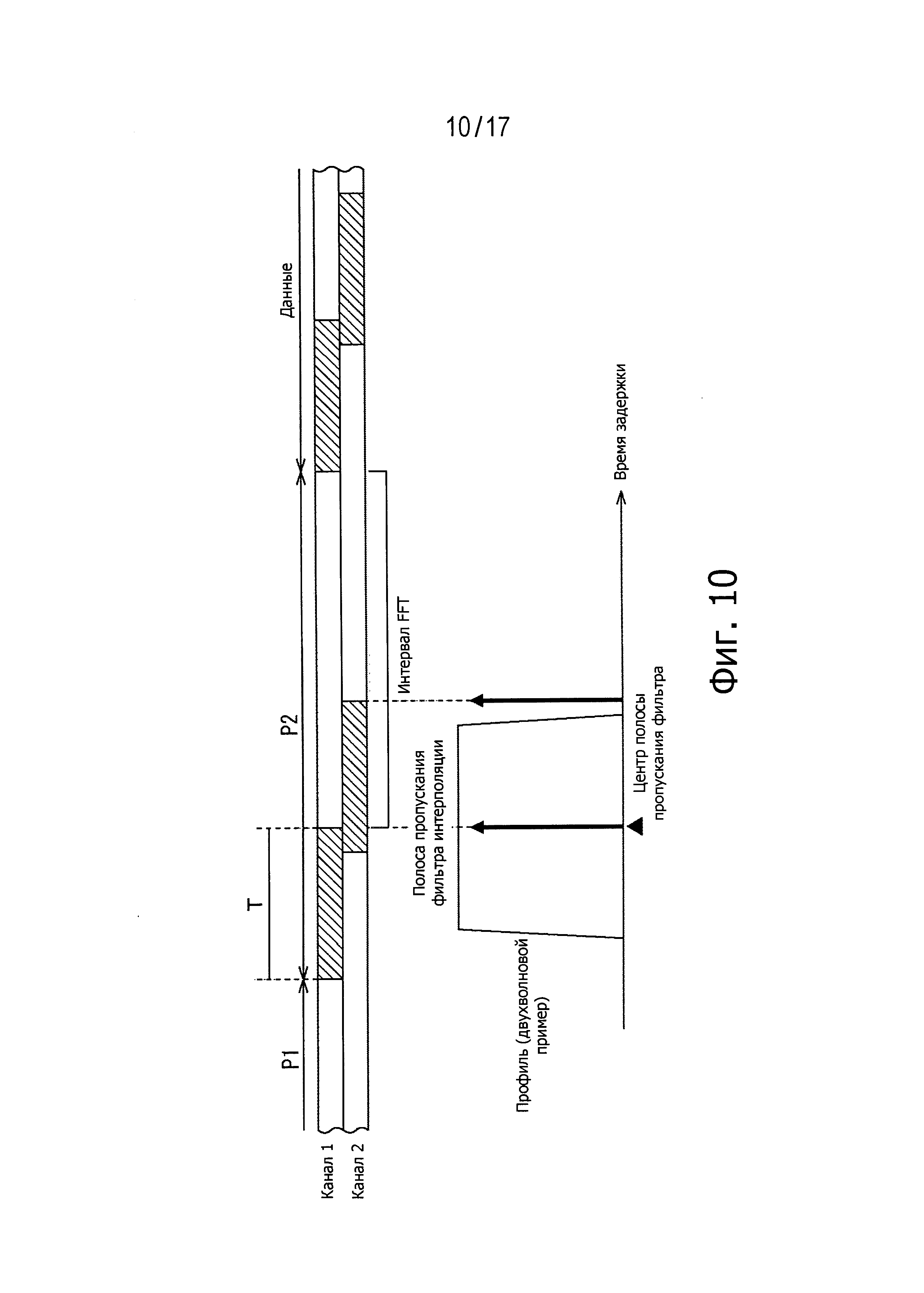
Фиг.10 является диаграммой, на которой показан пример настроек интервала FFT и центральной позиции полосы пропускания фильтра в фильтре интерполяции.
В верхней половине фиг.10 показана временная область символа Р2, передаваемого по каналу 1, и временная область символа Р2, передаваемого по каналу 2. Интервалы, указанные заштрихованными участками, являются интервалами GI. Поперечное направление представляет время.
В нижней половине фиг.10 показана полоса пропускания фильтра интерполяции. По оси абсцисс указано время задержки. Левая верхняя стрелка, показанная на оси абсцисс, представляет канал 1, и правая верхняя стрелка, показанная на оси абсцисс, представляет канал 2. Расстояние между каналом 1 и каналом 2 эквивалентно времени задержки, показанном в верхней половине фиг.10.
Как показано в нижней половине фиг.10, в случае когда центральная позиция полосы пропускания в фильтре интерполяции установлена в соответствии с позицией для канала 1, полоса пропускания фильтра не будет включать в себя канал 2, и, следовательно, корректная интерполяция не может быть выполнена для характеристик канала во время выравнивания.
Как было описано выше, оптимальный интервал FFT и оптимальную центральную позицию полосы пропускания фильтра в фильтре интерполяции определяют на основе данных, накопленных в буфере 29, и точная демодуляция символа Р2 может быть выполнена с использованием интервала FFT и центральной позиции.
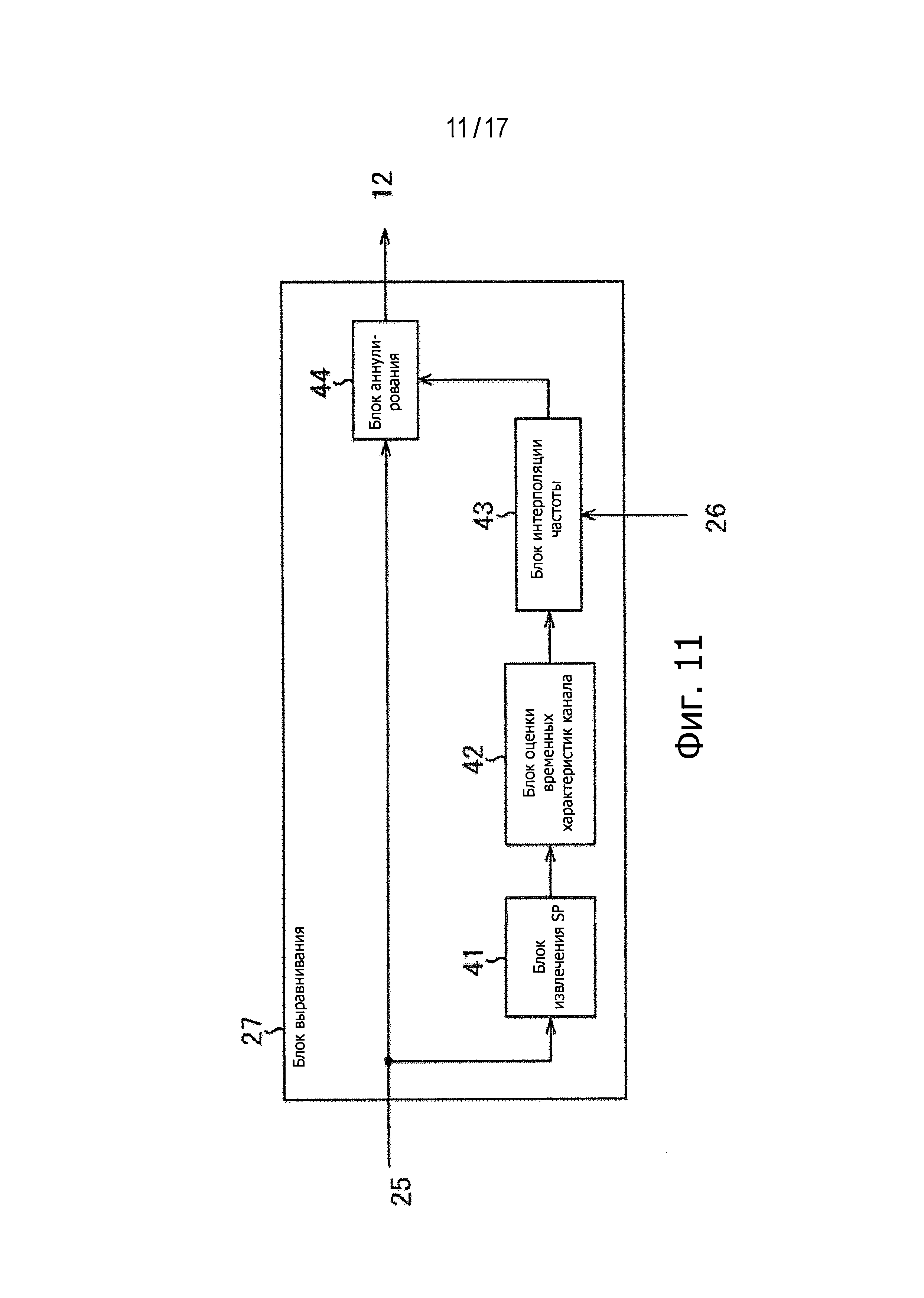
Фиг.11 является блок-схемой, на которой показан пример структуры блока 27 выравнивания.
Блок 27 выравнивания включает в себя блок 41 извлечения SP, блок 42 оценки временных характеристик канала, блок 43 интерполяции частоты и блок 44 аннулирования.
Блок 41 извлечения SP извлекает сигнал SP из частотной области сигнала OFDM, подаваемого от блока 25 выполнения операции FFT, и оценивает характеристики канала поднесущей в местоположении сигнала SP, аннулируя модулированную компоненту сигнала SP. Блок 41 извлечения сигнала выводит сигнал, указывающий оцененные характеристики канала на блок 42 оценки временных характеристик канала.
На основе характеристик канала, оцененных блоком 41 извлечения SP, блок 42 оценки временных характеристик канала оценивает характеристики поднесущей, сопровождающих сигнал SP в местоположении каждого символа OFDM, выровненного во временном направлении (направлении символа OFDM). Блок 42 оценки характеристик временного канала выводит сигнал, указывающий оцененные характеристики канала, на блок 43 интерполяции частоты.
Блок 43 интерполяции частоты выполняет операцию интерполяции для характеристики канала в частотном направлении и оценивает характеристики поднесущей в местоположении каждого символа OFDM, выровненного в частотном направлении, от характеристик канала, подаваемых от блока 42 оценки характеристик временного канала. Блок 43 снабжен фильтром интерполяции, имеющим заданную полосу частот, и выполняет операцию интерполяции с использованием данного фильтра. Центральную позицию полосы пропускания фильтра в фильтре интерполяции устанавливают блоком 26 поиска интервала FFT/центральной позиции фильтра.
В результате оценивают характеристики канала всех поднесущих в местоположениях, соответствующих символов OFDM. Блок 43 интерполяции частоты выводит сигнал, указывающий результаты оценки характеристик канала, на блок 44 аннулирования.
Блок 44 аннулирования аннулирует компоненту сигнала, указывающую характеристики канала всех поднесущих, подаваемых от блока 43 интерполяции частоты, из частотной области сигнала OFDM, подаваемого от блока 25 выполнения операции FFT. Таким образом, компоненты искажений, вызываемых передачей каналов, удаляют из частотного диапазона сигнала OFDM. Блок 44 выводит выровненный частотный диапазон сигнала OFDM с удаленными компонентами искажения на блок 12 корректирования ошибки.
Далее будут описаны со ссылками на фиг.12 и 13 операции, выполняемые приемным устройством 1, для установки синхронизации в соответствии последовательностью синхронизации, показанной на фиг.9.
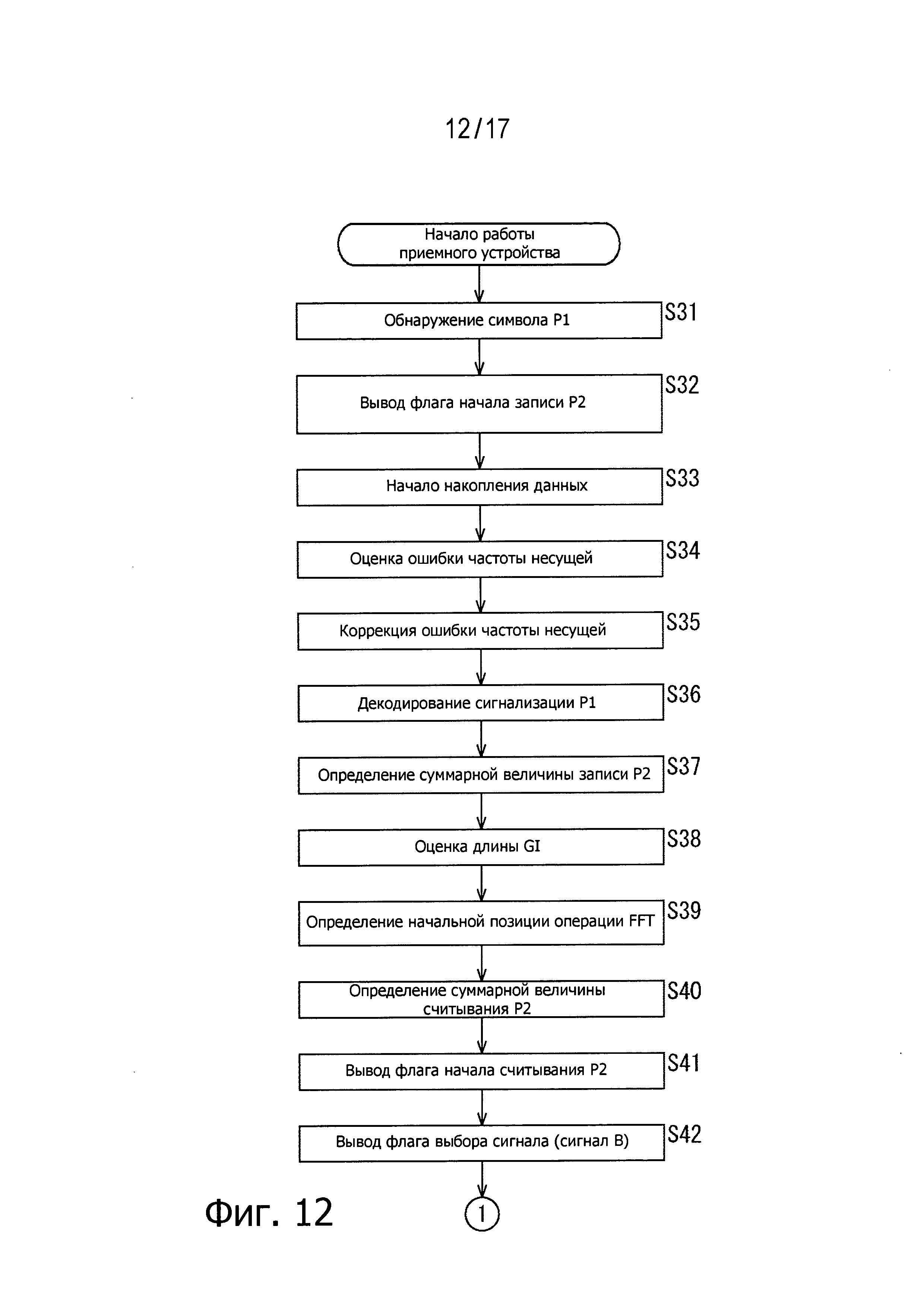
Операции на этапах с S31 по S45 аналогичны операциям на этапах с S1 по S15, показанным на фиг.7 и 8. Пояснения, которые уже были сделаны, повторены не будут. Операцию на каждом этапе выполняют параллельно с операцией на другом этапе, или выполняют до или после операции на другом этапе, когда это уместно.
На этапе S31 блок 23 оценки ошибки частоты несущей/обработки Р1 обнаруживает символ Р1 из временной области сигнала OFDM.
На этапе S32 блок 30 управления буфером выводит флаг начала записи Р2 в буфер 29.
На этапе S33 буфер 29 начинает накапливать сигнал OFDM временной области, введенный извне.
На этапе S34 блок 23 оценки ошибки частоты несущей/обработки Р1 оценивает ошибку частоты несущей на основе временной области сигнала OFDM, и выводит величину ошибки частоты несущей на блок 22 корректировки ошибки частоты несущей.
На этапе S35 блок 22 корректировки ошибки частоты несущей корректирует частоту несущей, содержащуюся во временной области сигнала OFDM, в соответствии с величиной ошибки частоты несущей, подаваемой от блока 23 оценки ошибки частоты несущей/обработки Р1.
На этапе S36 блок 23 оценки ошибки частоты несущей/обработки Р1 декодирует Сигнализацию Р1 из обнаруженного символа Р1 первого кадра Т2, и выводит информацию о размере FFT.
На этапе S37 блок 30 управления буфером определяет величину записи Р2, используя размер FFT, распознанный блоком 23 оценки ошибки частоты несущей/обработки Р1, и выводит информацию о величине записи Р2 в буфер 29. Накопление временной области сигнала OFDM буфером 29 продолжают до тех пор, пока не будет накоплено количество данных, эквивалентное величине записи Р2.
На этапе S38 блок 28 оценки GI оценивает длину GI на основе временной области сигнала OFDM, подаваемого от блока 22 корректировки ошибки частоты несущей.
На этапе S39 блок 24 синхронизации символа определяет начальную позицию выполнения операции FFT для символа Р2 на основе позиции символа Р1, обнаруженного блоком 23 оценки ошибки частоты несущей/обработки Р1, и длины GI, оцененной блоком 28 оценки GI.
На этапе S40 блок 30 управления буфером определяет величину считывания Р2 на основе размера FFT, распознанного блоком 23 оценки ошибки частоты несущей/обработки Р1, и длины GI, оцененной блоком 28 оценки GI.
На этапе S41 блок 30 управления буфером выводит информацию о величине считывания Р2 вместе с флагом начала считывания Р2 в буфер 29.
На этапе S42 блок 30 управления буфером выводит флаг выбора сигнала, указывающий временную область сигнала OFDM, который считывают из буфера 29, на блок 21 выбора сигнала.
На этапе S43 буфер 29 начинает считывать сигнал OFDM временной области. Считывание сигнала OFDM временной области буфером 29 продолжают до тех пор, пока сигнал OFDM, эквивалентный величине считывания Р2, не будет считан.
На этапе S44 блок 22 корректировки ошибки частоты несущей корректирует ошибку частоты несущей, содержащейся в сигнале символа Р2, считанного из буфера 29.
На этапе S45 блок 25 выполнения операции FFT выполняет операцию FFT для сигнала символа Р2, имеющего скорректированную ошибку частоты несущей, и выводит частотную область сигнала символа Р2.
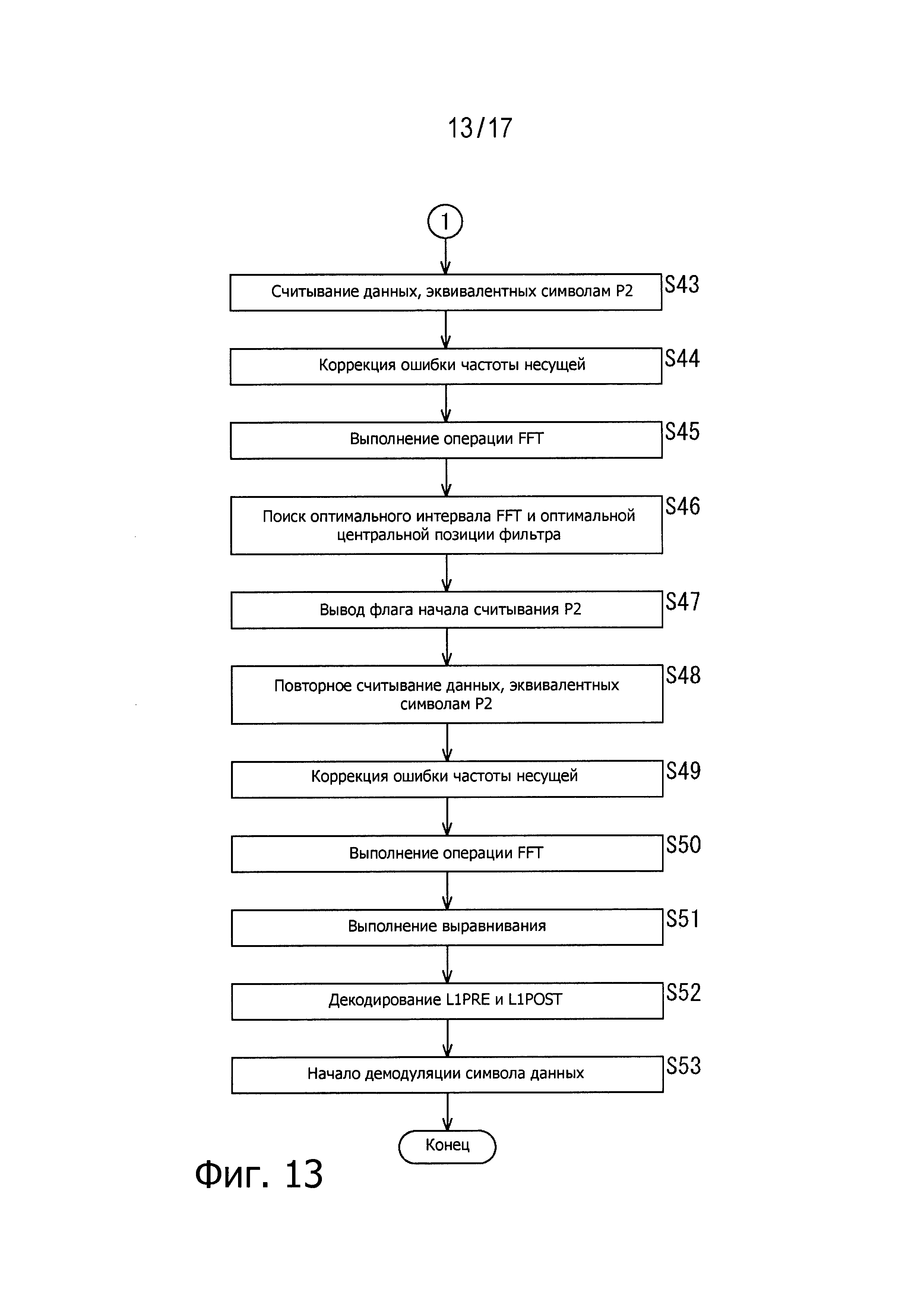
На этапе S46 на основе сигнала символа Р2, подаваемого от блока 25 выполнения операции FFT, блок 26 поиска центральной позиции фильтра/интервала FFT ищет оптимальный интервал FFT и оптимальную позицию полосы пропускания фильтра для фильтра интерполяции. Блок 26 поиска центральной позиции фильтра/интервала FFT выводит информацию об интервале FFT, определенную при поиске блоком 24 синхронизации символа, и выводит информацию о центральной позиции полосы частот фильтра для фильтра интерполяции на блок 27 выравнивания. Когда завершен поиск оптимального интервала FFT и оптимальной центральной позиции полосы пропускания фильтра для фильтра интерполяции, блок 26 поиска центральной позиции фильтра/интервала FFT выводит флаг завершения поиска центральной позиции фильтра/интервала FFT на блок 30 управления буфером, как это указано пунктирной стрелкой на фиг.6.
На этапе S47 в ответ на флаг завершения поиска центральной позиции фильтра/интервала FFT, подаваемого от блока 26 поиска центральной позиции фильтра/интервала FFT, блок 30 управления буфером заново выводит в буфер 29 информацию о величине считывания Р2 вместе флагом начала считывания Р2.
На этапе S48 буфер 29 начинает считывание накопленного сигнала OFDM временной области. Считывание сигнала OFDM временной области продолжают до тех пор, пока не будет считан сигнал OFDM, эквивалентный величине считывания Р2.
На этапе S49 блок 22 корректировки ошибки частоты несущей корректирует ошибку частоты несущей сигнала символа Р2, считанного из буфера 29.
На этапе S50 блок 25 выполнения операции FFT выполняет операцию FFT для сигнала символа Р2, имеющего скорректированную ошибку частоты несущей, и выводит сигнал символа Р2 частотного диапазона. В данном случае блок 25 выполнения операции FFT устанавливает оптимальный интервал FFT, определенный при поиске, проведенном блоком 26 поиска центральной позиции фильтра/интервала FFT, и затем выполняет операцию FFT.
На этапе S51 блок 27 выравнивания выполняет выравнивание сигнала символа Р2, подаваемого от блока 25 выполнения операции FFT. В данном случае блок 27 выравнивания устанавливает центральную позицию полосы пропускания фильтра для фильтра интерполяции, которая является оптимальной центральной позицией, определенной поиском, произведенным блоком 26 поиска центральной позиции фильтра/интервала FFT. Затем блок 27 выравнивания выполняет интерполяцию характеристик канала и выполняет выравнивание.
На этапе S52 блок 12 корректировки ошибки декодирует L1PRE и L1POST из выровненного сигнала символа Р2. При успешном декодировании L1PRE и L1POST блок 12 корректировки ошибки выводит флаг успешного декодирования L1PRE/L1POST.
На этапе S53 блок 11 обработки сигнала начинает демодуляцию символов данных, содержащихся в первом кадре Т2, используя информацию, полученную при декодировании L1PRE и L1POST.
При выполнении вышеописанных операций может быть быстро установлена синхронизация, и производительность синхронизации может быть улучшена.
В вышеприведенном описании выполняют поиск оптимального интервала FFT и поиск оптимальной центральной позиции полосы пропускания фильтра для фильтра интерполяции. Однако только один из поисков может быть произведен блоком 26 поиска центральной позиции фильтра/интервала FFT.
Данные, накопленные в буфере 29, используют для поиска оптимального интервала FFT и поиска оптимальной центральной позиции полосы пропускания фильтра для фильтра интерполяции, но и могут быть использованы при других операциях. Количество раз, когда считывают данные, накопленные в буфере 29, не является фиксированным, и данные, например, могут быть вычислены каждый раз при выполнении операции.
Примеры применения в приемной системе
Фиг.14 является блок-схемой, на которой показан пример структуры первого варианта осуществления приемной системы, в которой использован блок 11 обработки сигнала.
Приемная система, показанная на фиг.14, включает в себя блок получения 101, блок 102 декодирования канала и блок 103 декодирования источника информации.
Блок 101 получения получает сигнал через канал передачи (не показан) по сети, такой как цифровое наземное ТВ-вещание, цифровое спутниковое ТВ-вещание, сеть CATV (кабельное телевидение) или Интернет, и подает сигнал на блок 102 декодирования канала. Блок 11 обработки сигнала, показанный на фиг.6, включает в себя, например, блок 101 получения сигнала.
Блок 102 декодирования канала выполняет операцию декодирования канала, включающую в себя коррекцию ошибки сигнала, полученного блоком 101 получения сигнала через канал передачи, и подает результирующий сигнал на блок 103 декодирования источника информации.
Блок 103 декодирования источника информации выполняет операцию декодирования источника информации для сигнала, подвергаемого операции декодирования канала. Операция декодирования источника информации включает в себя восстановление сжатой информации до начальной информации и получение данных, подлежащих передаче.
А именно, сигнал, полученный блоком 101 получения сигнала через канал передачи, может быть подвергнут кодированию со сжатием для уменьшения суммарного количества информации для изображений или звука. В этом случае блок 103 декодирования источника информации выполняет операцию декодирования источника информации, например, восстановление сжатой информации до начальной информации, для сигнала, подвергаемого декодированию канала.
В случае когда сигнал, полученный блоком 101 получения сигнала через канал передачи, не был подвергнут кодированию со сжатием, блок 103 декодирования источника информации не выполняет восстановление сжатой информации до начальной информации. В данном случае например, операцией восстановления может быть декодирование MPEG. Операция декодирования также может включать в себя, как и операцию декодирования, дескрамблинование.
Приемная система, показанная на фиг.14, может быть использована, например, в телевизионном приемнике, принимающем сигнал цифрового ТВ-вещания. Каждый из блока 101 получения, блока 102 декодирования канала и блока 103 декодирования источника информации могут быть выполнены как одно независимое устройство (аппаратно (например, как ИС (Интегральная Схема)) или как программный модуль).
В качестве альтернативы блок 101 получения, блок 102 декодирования канала и блок 103 декодирования источника информации могут быть выполнены как независимые устройства. Блок 101 получения и блок 102 декодирования канала также могут быть выполнены как одно независимое устройство, а также блок 102 декодирования канала и блок 103 декодирования источника информации могут быть выполнены как одно независимое устройство.
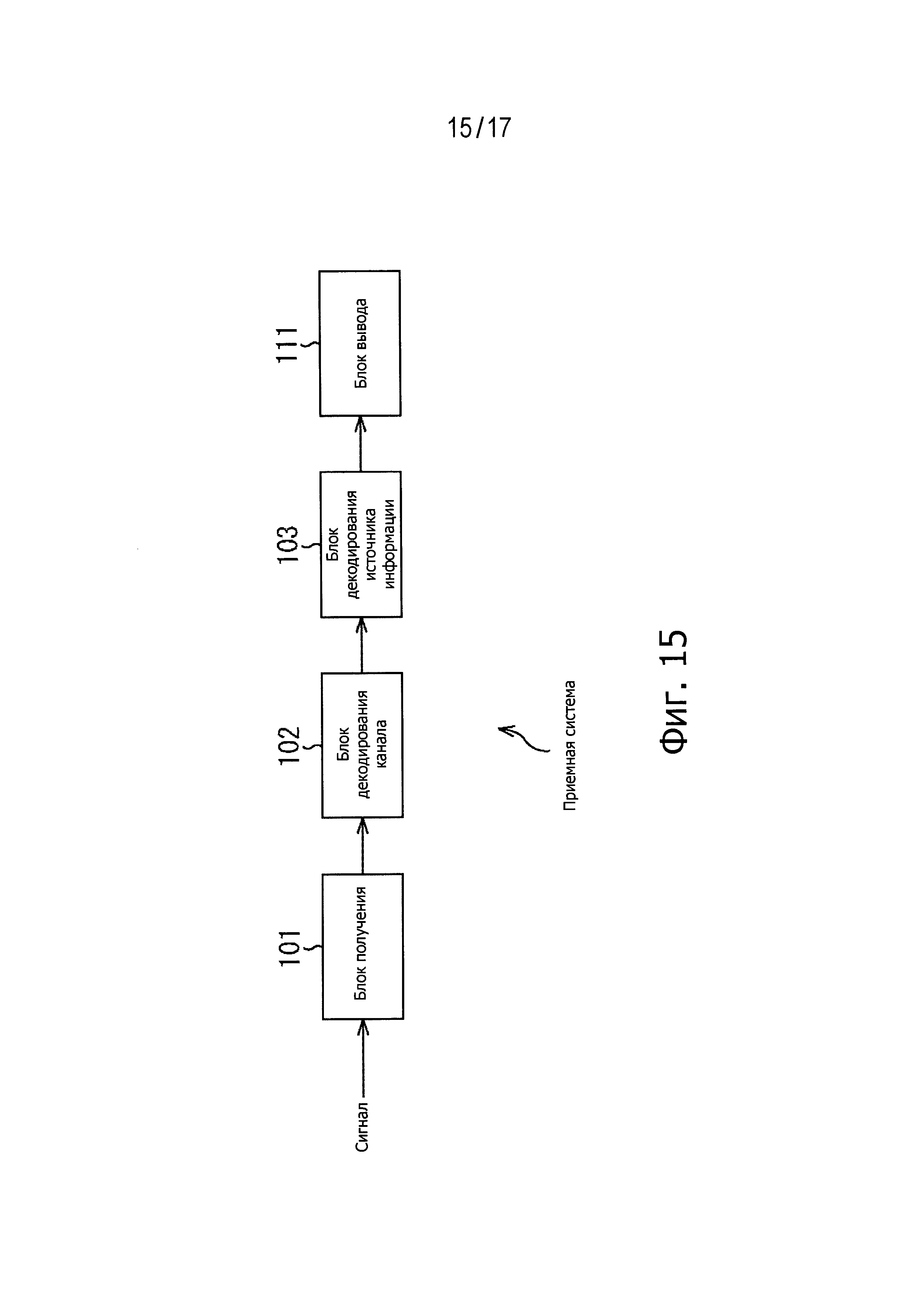
Фиг.15 является блок-схемой, на которой показан пример структуры второго варианта осуществления приемной системы, в которой используют блок 11 обработки сигнала.
В структуре, показанной на фиг.15, компоненты, показанные на фиг.14, обозначены одинаковыми номерами ссылочных позиций, что и на фиг.14, и их повторное описание будет опущено.
Структура приемной системы, показанной на фиг.15, аналогична структуре, показанной на фиг.14, тем, что включает в себя блок 101 получения, блок 102 декодирования канала и блок 103 декодирования источника информации, но отличается от структуры, показанной на фиг.14, тем, что дополнительно включает в себя блок 111 вывода.
Блок 111 вывода является, например, устройством отображения, отображающим изображения, или громкоговорителем, выводящим звук. Блок 111 вывода выводит изображения или звук в качестве сигнала, выводимого от блока 103 декодирования источника информации. То есть блок 111 вывода отображает изображения или выводит звук.
Приемная система, показанная на фиг.15, может быть использована, например, как телевизионный приемник, принимающий телевизионный сигнал цифрового ТВ-вещания, или радиоприемником, принимающим радиопередачи.
В случае когда сигнал, получаемый блоком 101 получения, не подвергают декодированию сжатия, сигнал, выводимый от блока 102 декодирования сигнала, подают напрямую на блок 111 вывода.
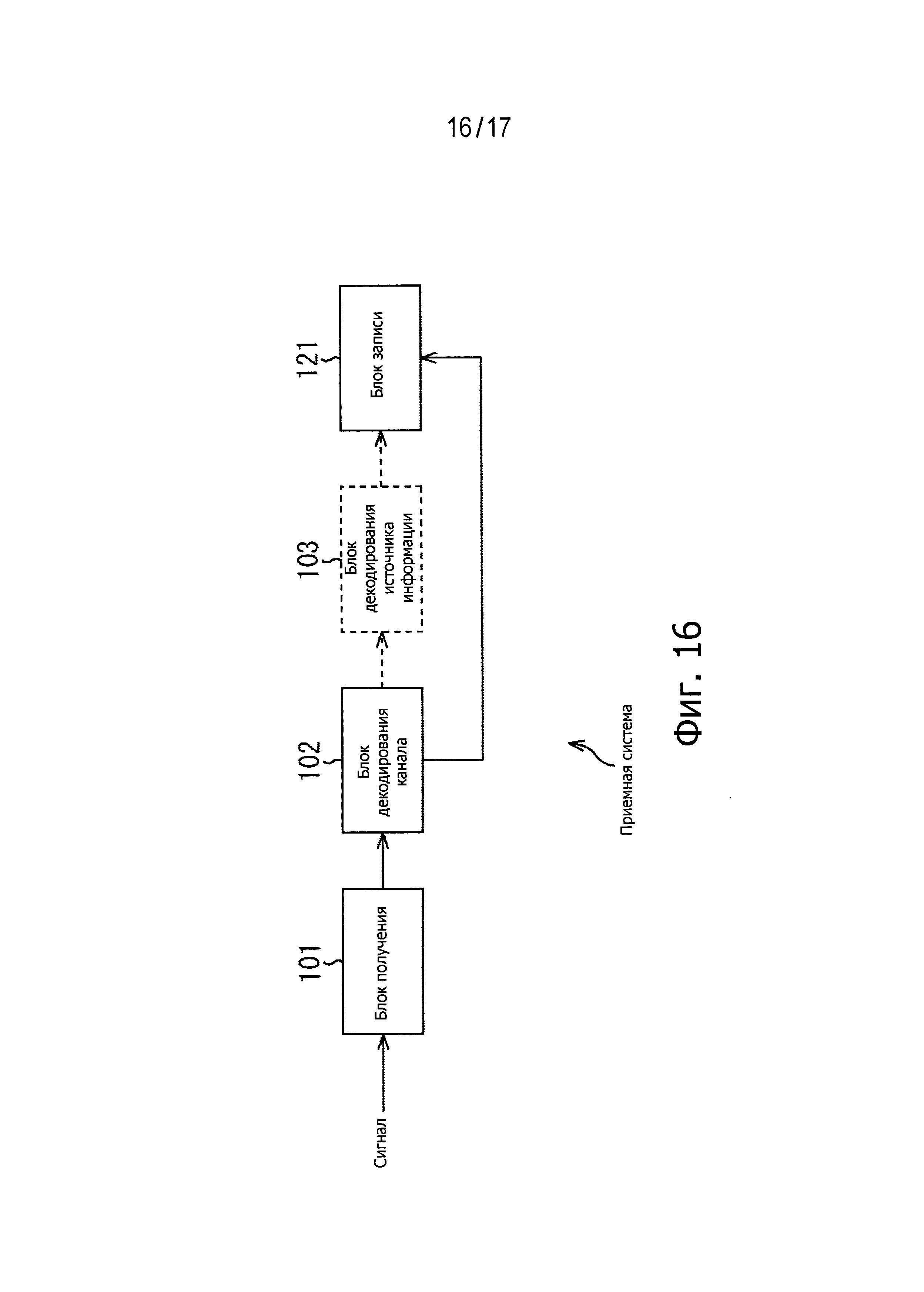
Фиг.16 является блок-схемой, на которой показана структура третьего варианта осуществления приемной системы, в которой используют блок 11 обработки сигнала.
В структуре, показанной на фиг.16, компоненты, аналогичные компонентам, показанным на фиг.14, обозначены одинаковыми номерами ссылочных позиций, что и на фиг.14, и их описание повторено не будет.
Структура приемной системы, показанной на фиг.16, аналогична структуре, показанной на фиг.14, тем, что включает в себя блок 101 получения и блок 102 декодирования канала, но отличается от структуры, показанной на фиг.14 тем, что не включает в себя блок 103 декодирования источника информации, однако дополнительно включает в себя блок 121 записи.
Блок 121 записывает (сохраняет) сигналы (например, пакеты TS (поток данных) MPEG TS), которые выводит блок 102 декодирования, на носитель информации, такой как оптический диск, жесткий диск (магнитный диск) или флэш-память.
Вышеописанная приемная система, показанная на фиг.16, может быть использована в записывающем устройстве и т.п., которое записывает ТВ-вещание.
Блок 103 декодирования источника информации может быть добавлен и сигналы, подвергаемые операции декодирования в модуле 103 декодирования источника информации, или изображения и звук могут быть записаны блоком 121 записи.
Пример структуры компьютера
Вышеописанная последовательность операций может быть реализована аппаратно, или быть выполнена с помощью программного обеспечения. В случае когда последовательность операций выполняют программным способом, программное обеспечение устанавливают с носителя записи на компьютер, например, со специализированным оборудованием или персональный компьютер общего назначения.
Фиг.17 является блок-схемой, на которой показан пример структуры аппаратного обеспечения компьютера, выполняющего вышеописанную последовательность операций в соответствии с программой.
ЦП (Центральный Процессор) 151, ПЗУ (Постоянное Запоминающее Устройство) 152 и ОЗУ (Оперативное Запоминающее Устройство) 153 соединены друг с другом шиной 154.
Дополнительно к шине 154 подключен интерфейс 155 ввода/вывода. Блок 156 ввода содержит клавиатуру, мышь и т.п., и блок 157 содержит устройство отображения, громкоговоритель и т.п., подключенные к интерфейсу 155 ввода/вывода. Блок 158 хранения содержит жесткий диск или энергонезависимую память, блок 159 связи содержит сетевой интерфейс и т.п., и привод 160 съемного носителя 161 информации также подключен к интерфейсу 155 ввода/вывода.
В компьютере, имеющем вышеописанную структуру, ЦП 151 загружает программу, сохраненную в блоке 158 хранения в ОЗУ 153, через, например, интерфейс 155 ввода/вывода и шину 154, и запускает программу для выполнения вышеописанной последовательности операций.
Программа, выполняемая ЦП 151, записана, например, на съемном носителе 161, или ее предоставляют посредством проводной или беспроводной передачи, такой как локальная вычислительная сеть, Интернет или цифровое вещание, и ее устанавливают в блок 151 записи.
Программа, выполняемая компьютером, может быть программой для выполнения процессов в хронологическом порядке в соответствии с последовательностью, описанной в соответствии с данным описанием изобретения, или программой, выполняющей процессы параллельно или при необходимости в ответ на запросы.
Необходимо отметить, что варианты осуществления настоящей технологии не ограничены вышеописанными вариантами осуществления, и могут быть сделаны различные модификации без отклонения от объема и сущности настоящей технологии.
Другие модификации
Настоящая технология может быть реализована следующими способами.
(1). Приемное устройство, включающее в себя:
блок обнаружения для обнаружения сигнала первой преамбулы из сигнала кадра, имеющего структуру кадра, содержащую сигнал первой преамбулы, указывающей раздел кадра, сигнал второй преамбулы, содержащий управляющую информацию, используемую при обработке сигнала данных, и сигнал данных, при этом сигнал второй преамбулы передают после сигнала первой преамбулы;
блок накопления для накопления сигнала второй преамбулы после обнаружения сигнала первой преамбулы; и
блок обработки для обработки сигнала данных на основе управляющей информации, содержащейся в сигнале второй преамбулы, накопленном блоком накопления, и сигнала данных, содержащегося в том же кадре, что и сигнал второй преамбулы, накопленный блоком накопления.
(2). Приемное устройство по (1), в котором блок накопления выполнен с возможностью накопления суммарного количества данных, эквивалентных наибольшему возможному суммарному количеству данных, в качестве суммарного количества данных сигнала второй преамбулы, и данных расположенных сразу после сигнала первой преамбулы.
(3). Приемное устройство по (1) или (2), в котором
сигнал кадра является сигналом кадра Т2, совместимым с DVB-T2,
сигнал первой преамбулы является символом Р1,
сигнал второй преамбулы является символом Р2, и
сигнал данных является сигналом символа данных.
(4). Приемное устройство по (3), дополнительно включающее в себя:
блок оценки, выполненный с возможностью оценки длины GI символов, образующих кадр Т2, на основе части сигнала кадра Т2; и
блок управления, выполненный с возможностью определения суммарного количества данных символа Р2 на основе размера FFT, указанного в информации, содержащейся в символе Р1, и длины GI, оцененной блоком оценки, и считывания сигнала, имеющего определенное количество данных в качестве символа Р2 из блока накопления.
(5). Приемное устройство по (4), в котором блок обработки включает в себя:
блок выполнения операции FFT, выполненный с возможностью осуществления операции FFT для сигнала символа Р2, считанного из блока накопления, при этом начальная позиция операции FFT расположена после позиции символа Р1 на длину GI, оцененную блоком оценки, и интервал FFT является интервалом, начинающимся с начальной позиции, и имеющим размер, эквивалентный размеру FFT;
блок выравнивания, выполненный с возможностью выравнивания сигнала символа Р2 в частотном диапазоне, полученным при операции FFT; и
блок декодирования, выполненный с возможностью декодирования Сигнализации L1PRE и Сигнализации L1POST из выровненного сигнала символа Р2.
(6). Приемное устройство по (5), дополнительно включающее в себя
блок поиска, выполненный с возможностью поиска интервала FFT на основе сигнала символа Р2 в частотном диапазоне,
при этом:
блок управления выполнен с возможностью повторного считывания, когда завершен поиск, выполняемый блоком поиска сигнала символа Р2 из блока накопления, и
блок выполнения операции FFT выполнен с возможностью осуществления операции FFT для сигнала в интервале FFT, обнаруженном при поиске, при этом сигнал в интервале FFT является повторно считанным сигналом символа Р2.
(7). Приемное устройство по (5) или (6), в котором
блок выравнивания включает в себя:
блок оценки характеристик канала для извлечения пилот-сигнала из сигнала символа Р2 в частотном диапазоне, и оценки характеристики канала поднесущей в местоположении пилот-сигнала;
блок интерполяции для выполнения интерполяции характеристик канала, оцененных блоком оценки характеристик канала, с использованием фильтра интерполяции; и
блок корректировки для корректировки искажения сигнала символа Р2 в частотном диапазоне на основе характеристик канала всех поднесущих, определенных при интерполяции, выполненной блоком интерполяции,
приемное устройство дополнительно включает в себя блок поиска для поиска центральной позиции полосы пропускания фильтра для фильтра интерполяции на основе сигнала символа Р2 в частотном диапазоне, при этом,
когда поиск, выполняемый блоком поиска, завершен, блок управления выполнен с возможностью повторного считывания сигнала символа Р2 из блока накопления,
блок выполнения операции FFT для осуществления операции FFT для повторно считанного сигнала символа Р2, и
блок интерполяции для выполнения интерполяции характеристик канала с центральной позицией полосы пропускания фильтра для фильтра интерполяции, где центральная позиция обнаружена блоком поиска.
(8). Способ приема, включающий в себя этапы, на которых:
обнаруживают сигнал первой преамбулы в сигнале кадра, имеющего структуру, содержащую сигнал первой преамбулы, указывающий раздел кадра, сигнал второй преамбулы, содержащий управляющую информацию, используемую при обработке сигнала данных, и сигнал данных, при этом сигнал второй преамбулы передают после сигнала первой преамбулы;
выполняют накопления сигнала второй преамбулы, при обнаружении сигнала первой преамбулы; и
выполняют обработку сигнала данных на основе управляющей информации, содержащейся в сигнале второй преамбулы, при этом сигнал данных содержится в том же кадре, что и накопленный сигнал второй преамбулы.
(9). Программа, вызывающая выполнение компьютером операций, содержащих этапы, на которых:
обнаруживают сигнал первой преамбулы в сигнале кадра, имеющего структуру, содержащую сигнал первой преамбулы, указывающий раздел кадра, сигнал второй преамбулы, содержащий управляющую информацию, используемую при обработке сигнала данных, и сигнал данных, при этом сигнал второй преамбулы передают после сигнала первой преамбулы;
выполняют накопление сигнала второй преамбулы, при обнаружении сигнала первой преамбулы; и
выполняют обработку сигнала данных на основе управляющей информации, содержащейся в сигнале второй преамбулы, при этом сигнал данных содержится в том же кадре, что и накопленный сигнал второй преамбулы.
Список ссылочных позиций
1 Приемное устройство
11 Блок обработки сигнала
12 Блок корректировки ошибки
21 Блок выбора сигнала
22 Блок корректировки ошибки частоты несущей
23 Блок оценки корректировки ошибки частоты несущей/обработки Р1
24 Блок синхронизации символа
25 Блок выполнения операции FFT
26 Блок поиска центральной позиции фильтра/интервала FFT
27 Блок выравнивания
28 Блок оценки GI
29 Буфер
30 Блок управления буфером
Устройство дисплея, способ обработки сигнала изображения и программа
Приемное устройство, способ приема, программа и приемная система
Лекарственное средство с замедленным высвобождением, адсорбент, функциональный пищевой продукт, маска и поглощающий слой
Устройство для передачи волны через диэлектрик, способ изготовления устройства и способ передачи волны миллиметрового диапазона через диэлектрик
Система и способ для эффективной передачи пакетов содержания в электронные устройства
Система топливного элемента и электронное устройство
Адсорбент, моющее средство, лекарственное средство при почечной недостаточности и функциональное питание
Устройство обработки информации, диск, способ обработки информации и программа
Система и способ для упрощения передачи контента между клиентскими устройствами в электронной сети
Неводный электролитический раствор, содержащий ионы магния, и электрохимическое устройство с использованием этого раствора
Устройство дисплея, способ обработки сигнала изображения и программа
Топливный элемент и способ изготовления топливного элемента
Приемное устройство, способ приема, программа и приемная система
Лекарственное средство с замедленным высвобождением, адсорбент, функциональный пищевой продукт, маска и поглощающий слой
Модуль камеры
Устройство для передачи волны через диэлектрик, способ изготовления устройства и способ передачи волны миллиметрового диапазона через диэлектрик
Система и способ для эффективной передачи пакетов содержания в электронные устройства
Система топливного элемента и электронное устройство
Адсорбент, моющее средство, лекарственное средство при почечной недостаточности и функциональное питание
Устройство обработки информации, диск, способ обработки информации и программа

