Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Изобретение относится к области регулирования движения дорожного транспорта, а именно способам и системам определения скорости транспортного средства, и может быть использовано для контроля соблюдения скоростного режима водителями транспортных средств.
Известен способ определения скорости транспортного средства с помощью локаторов, описанный в патенте RU 2237266, в котором испускают электромагнитное излучение в сторону движущихся транспортных средств и принимают отраженный сигнал с измененной частотой в силу эффекта Доплера. По изменению сигнала вычисляют скорость транспортного средства.
Недостатком этого способа является то, что его нельзя использовать в полностью автоматизированных комплексах фиксации нарушений правил дорожного движения, поскольку измерение скорости в нем не сопровождается автоматической идентификацией транспортного средства: локаторы используют сотрудники дорожно-патрульных служб, которые самостоятельно принимают решение, к какому из транспортных средств относится выполненное с помощью данного способа измерение скорости.
Известна система определения скорости транспортного средства, состоящая из локаторов и видеокамер, описанная в патенте RU 2382416, в которой локаторы используют для определения скорости и положения на дорожном полотне транспортных средств, а видеокамеры используют в комплексе с электронно-вычислительным устройством для идентификации государственных регистрационных знаков транспортных средств. В этой системе автоматически сопоставляют показания локаторов с изображениями транспортных средств, сформированными с помощью видеокамер, тем самым идентифицируют транспортные средства - нарушители скоростного режима.
Недостатком этой системы с использованием видеокамер и локатора является то, что хотя она и способна работать автоматически без участия оператора для идентификации нарушителей скоростного режима, но при этом является сложной и, соответственно, недостаточно точной, поскольку сопряжение зон радиолокации на дороге с изображением транспортных средств - сложная задача, и на практике, в случае пересекающихся траекторий транспортных средств, измеренная скорость может неверно сопоставиться с идентифицированным автомобилем.
Общим недостатком описанных выше аналогов, использующих радиолокацию для определения скорости транспортного средства, является наличие доступных детекторов, которые заранее подают сигнал водителям транспортных средств о том, что по ходу движения функционируют измерительно-контрольный комплекс. Это снижает степень контроля соблюдения правил дорожного движения.
Известен способ определения скорости транспортного средства с помощью одной видеокамеры и электронно-вычислительного устройства, описанный в патенте RU 2419884, в котором автоматически выделяют положение государственного регистрационного знака транспортного средства на изображении с видеокамеры при выполнении процедуры идентификации регистрационного номера транспортного средства. Способ основан на сопоставлении пространства координат изображения, формируемого с помощью видеокамеры, с пространством координат дорожного полотна, по которому движется транспортное средство. Поскольку положение регистрационных знаков фиксируют на последовательных кадрах видеопотока, то скорость определяют как смещение вдоль дорожного полотна, полученное после преобразования смещения государственного регистрационного знака транспортного средства из пространства изображения камеры в пространство дорожного полотна, деленное на время, прошедшее между регистрацией кадров смещения.
Этот способ определения скорости транспортного средства с помощью одной видеокамеры является пассивным с точки зрения радиоизлучения, поэтому расположение измерительной системы не может быть детектировано дистанционно с помощью бытовых автомобильных антирадаров. Кроме того, идентификация по номерной пластине транспортного средства позволяет почти со 100%-ной вероятностью идентифицировать транспортное средство нарушителя, даже если в поле зрения видеокамеры присутствует несколько транспортных средств. Однако данный способ опирается на ряд предположений, изложенных в формуле изобретения, которые выполняются не для всех транспортных средств, что может привести к существенной ошибке измерения скорости для таких транспортных средств в сторону увеличения. Этот способ опирается на предположение, что пластина государственного регистрационного знака транспортного средства не деформирована и не загрязнена, что позволяет точно определить прямоугольную область рамки пластины, и на основе выделенного четырехугольника точно определить положение проекции транспортного средства на плоскость дорожного полотна. На практике возникают примеры, когда определение точного положения рамки пластины государственного регистрационного знака транспортного средства затруднено вследствие деформации пластины в результате ДТП. Чаще всего это возникает из-за отклонений от регламентов и ГОСТов, которые обязывают водителей ТС следить за чистотой и исправностью номерной пластины с государственным регистрационным знаком. В частности, в Российской Федерации крепление пластин с государственными регистрационными знаками к транспортным средствам регулируется ГОСТом Р 50577-93. Однако нарушения правил и ГОСТов для внешнего вида и крепления номерных пластин юридически никак не связаны с нарушениями скоростного режима и не должны так трактоваться контрольно-измерительными комплексами для фиксации превышения допустимой скорости движения. Другим недостатком этого способа является то, что в нем не применяют статистическую обработку данных о положении номерной пластины транспортного средства, полученных на множестве кадров видеопотока, которые фиксируют проезд транспортного средства в поле зрения видеокамеры. Используют лишь первый и последний кадр, что снижает точность измерения скорости транспортного средства.
Наиболее близким к заявленному изобретению является способ определения скорости транспортного средства, описанный в патенте GB 2503328, который похож на способ предыдущего аналога, описанный RU 2419884, однако отличается от него тем, что для определения скорости транспортного средства в поле зрения видеокамеры должна присутствовать точка соприкосновения колес транспортного средства с дорожным полотном. Данный способ выбран в качестве прототипа заявленного изобретения.
Недостатком способа-прототипа является то, что не во всех ракурсах обзора транспортного средства видна точка соприкосновения транспортного средства с дорожным полотном (например, см. Фиг. 3.) Другой существенный недостаток этого способа заключается в том, что относительная погрешность измерения скорости в нем достигает 8%, судя по графику на рисунке, т.е. при скорости транспортного средства 100 км/ч абсолютная погрешность равна 8 км/ч, что является недопустимым при сертификации современных измерительных средств скорости транспортного средства в рамках законодательства РФ.
Кроме того, способ-прототип, в котором предлагают использовать стереосистему из двух видеокамер для измерения скорости, позволяет более точно оценивать положение проекции номерной пластины на плоскость дорожного полотна по сравнению со способом-аналогом, описанном в патенте RU 2419884, соответственно, более точными получаются осуществляемые стереокамерами измерения скорости. Однако использование двух камер вместо одной приводит к тому, что измерительный комплекс становится существенно сложнее с технической точки зрения, что приводит к его удорожанию как в производстве, так и в эксплуатации. Также следует отметить, что в способе-прототипе, как и в способе-аналоге, описанном в патенте RU 2419884, не используют статистику измерений по множеству кадров видеоизображения, что снижает точность определения скорости.
Задачей заявленного изобретения является создание способа и системы определения скорости транспортного средства с повышенной точностью определения скорости; без ограничений на ракурс наблюдения транспортного средства; а также с более простой и, следовательно, более дешевой конструкцией за счет использования единственной видеокамеры и отсутствия активных излучателей.
Поставленная задача решена путем создания способа определения скорости транспортного средства, в котором с помощью видеокамеры формируют изображение дорожного полотна и находящихся на нем транспортных средств, а с помощью электронно-вычислительного устройства:
- на предварительном этапе калибровки устанавливают соответствие между пиксельными координатами точек изображения, формируемого видеокамерой, и метрическими координатами точек дорожного полотна, при этом для нескольких точек изображения и соответствующих им точек дорожного полотна получают и используют данные об измеренном расстоянии от точки изображения до соответствующей ей точки дорожного полотна;
- на предварительном этапе калибровки также вычисляют высоту подвеса камеры над плоскостью дорожного полотна и координаты точки проекции положения видеокамеры на дорожное полотно;
- определяют время фиксации для каждого кадра изображения, сформированного видеокамерой;
используя соответствие между координатами точек изображения, формируемого видеокамерой, и координатами точек дорожного полотна, а также используя высоту подвеса камеры над плоскостью дорожного полотна и координаты точки проекции положения видеокамеры на дорожное полотно с помощью электронно-вычислительного устройства:
на каждом кадре видеопоследовательности, содержащей транспортное средство, определяют положение элементов государственного регистрационного знака транспортного средства и координаты характерных элементов транспортного средства в окрестности номерной пластины;
определяют модель транспортного средства, по которой определяют координаты характерных элементов транспортного средства этой модели друг относительно друга и высоту характерных элементов транспортного средства этой модели над плоскостью дорожного полотна;
статистически определяют характерные точки транспортного средства, с помощью которых можно наиболее точно определить положение транспортного средства на плоскости дорожного полотна;
производят перерасчет координат изображения характерных точек транспортного средства в координаты ортогональной проекции характерных точек на плоскость дорожного полотна, используя информацию о высоте характерных точек над дорожным полотном;
статистически выделяют траектории характерных точек, движение которых наиболее точно соответствует модели твердого тела, и формируют из этих траекторий усредненную траекторию движения транспортного средства, снижая случайную погрешность позиционирования;
с помощью статистического анализа данных о положении транспортного средства в проекции на плоскость дорожного полотна в моменты времени фиксации кадров изображения оценивают результирующую скорость транспортного средства, компенсируя случайную погрешность многократным позиционированием на последовательных кадрах видеопотока.
В предпочтительном варианте осуществления способа на этапе калибровки устанавливают соответствие между пиксельными координатами точек изображения, формируемого видеокамерой, и метрическими координатами точек дорожного полотна, при этом для нескольких точек изображения и соответствующих им точек дорожного полотна с помощью лазерного дальномера измеряют расстояние от точки изображения до соответствующей ей точки дорожного полотна; на этапе калибровки с помощью лазерного дальномера измеряют высоту подвеса камеры над плоскостью дорожного полотна и координаты точки проекции положения видеокамеры на дорожное полотно.
В предпочтительном варианте осуществления способа определяют модель транспортного средства, при этом определяют на номерной пластине государственный номер транспортного средства и отправляют запрос на него в базу данных зарегистрированных в ГИБДД транспортных средств, соединенную с электронно-вычислительным устройством, а в ответ на запрос получают из базы данных данные о модели транспортного средства.
В предпочтительном варианте осуществления способа определяют модель транспортного средства, при этом отправляют запрос в базу данных транспортных средств, находящуюся в памяти электронно-вычислительного устройства и содержащую данные о моделях транспортных средств и соответствующих им координатах характерных элементов транспортных средств в окрестности номерной пластины, а в ответ на запрос получают из базы данных данные о модели транспортного средства.
Поставленная задача решена также путем создания системы определения скорости транспортного средства, содержащая соединенные между собой видеокамеру и электронно-вычислительное устройство, причем видеокамера выполнена с возможностью формирования изображения дорожного полотна и находящихся на нем транспортных средств; а электронно-вычислительное устройство выполнено с возможностью:
- на предварительном этапе калибровки установки соответствия между пиксельными координатами точек изображения, формируемого видеокамерой, и метрическими координатами точек дорожного полотна, при этом для нескольких точек изображения и соответствующих им точек дорожного полотна получения и использования данных об измеренном расстоянии от точки изображения до соответствующей ей точки дорожного полотна;
- на предварительном этапе калибровки также вычисления высоты подвеса камеры над плоскостью дорожного полотна и координат точки проекции положения видеокамеры на дорожное полотно;
определения времени фиксации для каждого кадра изображения, сформированного видеокамерой; кроме того, электронно-вычислительное устройство выполнено с возможностью:
на каждом кадре видеопоследовательности, содержащей транспортное средство, определения положения элементов государственного регистрационного знака транспортного средства и координат характерных элементов транспортного средства в окрестности номерной пластины;
определения модели транспортного средства, и по ней определения координат характерных элементов транспортного средства этой модели друг относительно друга и высоты характерных элементов транспортного средства этой модели над плоскостью дорожного полотна;
статистически определения характерных точек транспортного средства, с помощью которых можно наиболее точно определить положение транспортного средства на плоскости дорожного полотна;
выполнения перерасчета координат изображения характерных точек транспортного средства в координаты ортогональной проекции характерных точек на плоскость дорожного полотна, используя информацию о высоте характерных точек над дорожным полотном;
статистически выделения траекторий характерных точек, движение которых наиболее точно соответствует модели твердого тела, и формирования из этих траекторий усредненной траектории движения транспортного средства, снижая случайную погрешность позиционирования;
с помощью статистического анализа данных о положении транспортного средства в проекции на плоскость дорожного полотна в моменты времени фиксации кадров изображения оценки результирующей скорости транспортного средства, при этом компенсации случайной погрешности многократным позиционированием на последовательных кадрах видеопотока.
В предпочтительном варианте осуществления системы электронно-вычислительное устройство выполнено с возможностью определения модели транспортного средства, при этом определения на номерной пластине государственного номера транспортного средства и отправки запроса на него в базу данных зарегистрированных в ГИБДД транспортных средств, соединенную с электронно-вычислительным устройством, а в ответ на запрос получения данных о модели транспортного средства из базы данных зарегистрированных в ГИБДД транспортных средств.
В предпочтительном варианте осуществления системы электронно-вычислительное устройство выполнено с возможностью определения модели транспортного средства, при этом отправки запроса в базу данных транспортных средств, находящуюся в памяти электронно-вычислительного устройства и содержащую данные о моделях транспортных средств и соответствующих им координатах характерных элементов транспортных средств в окрестности номерной пластины, а в ответ на запрос получения из базы данных данных о модели транспортного средства.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
Фиг. 1. Блок-схема системы определения скорости транспортного средства, выполненная согласно изобретению.
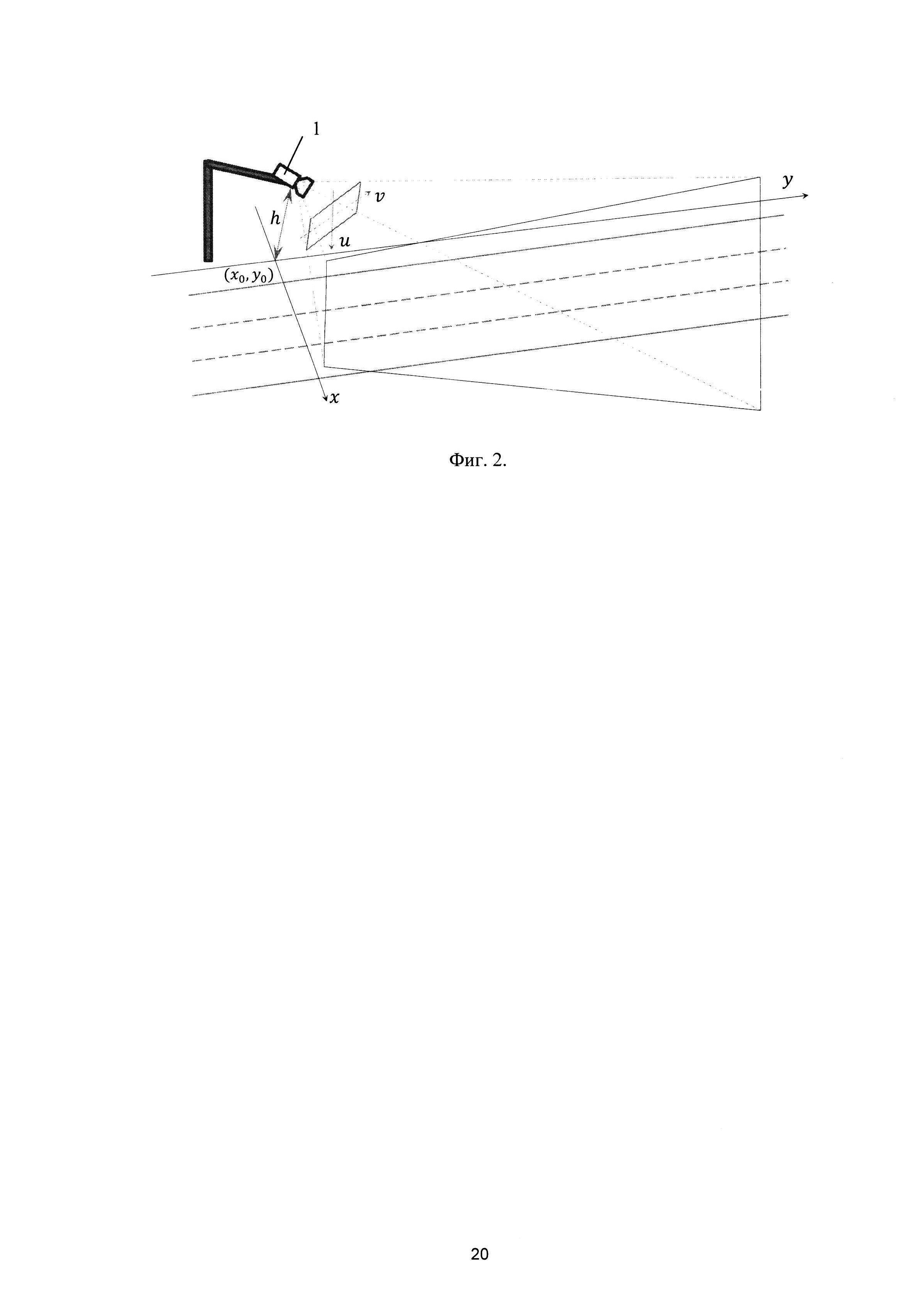
Фиг. 2. Схема проекции координат (x, y) дорожного полотна на пиксельные координаты (u, ν) изображения, формируемого видеокамерой, выполненная согласно изобретению.
Фиг. 3. Пример выделения характерных точек на изображении транспортного средства, выполненный согласно изобретению.
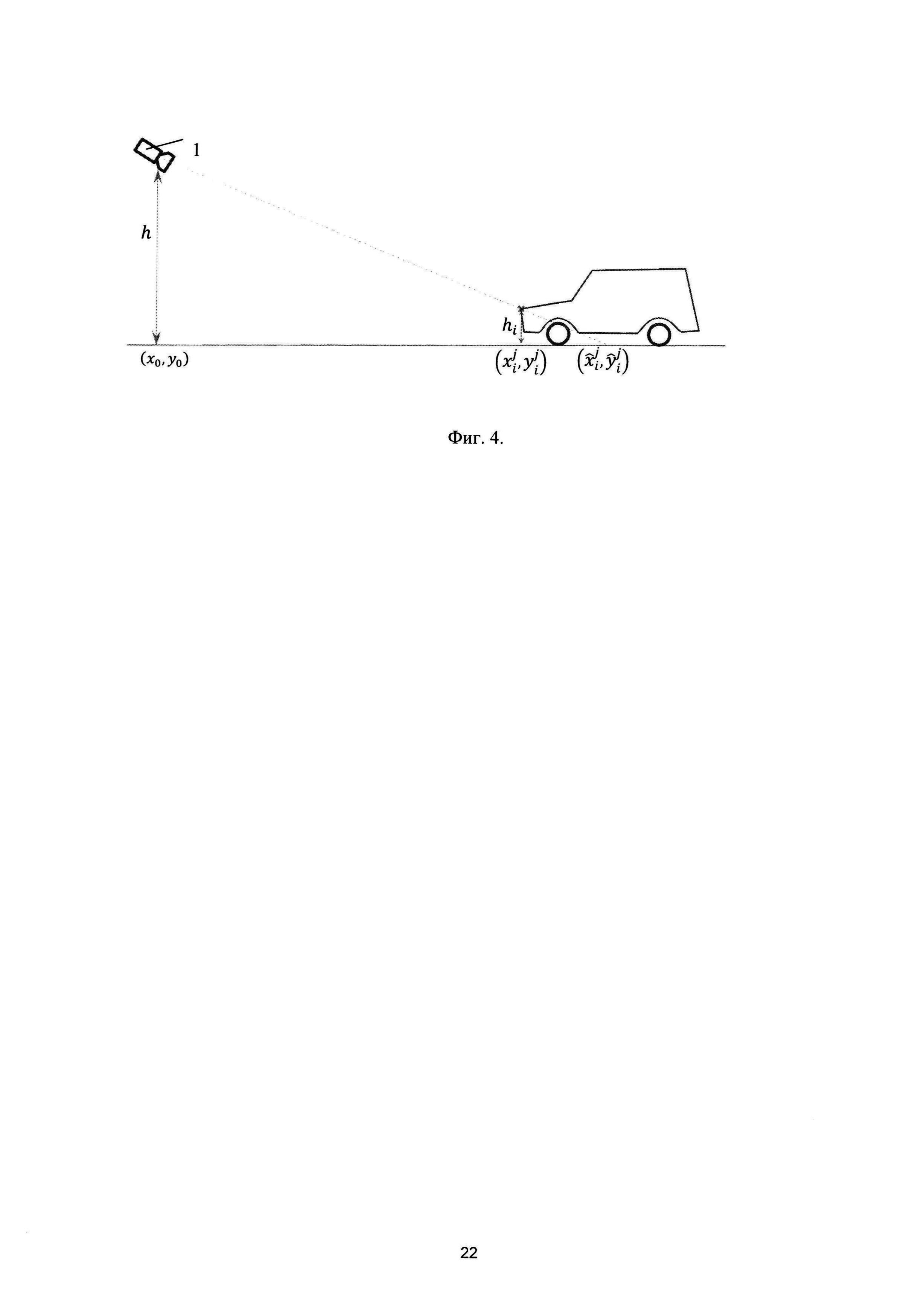
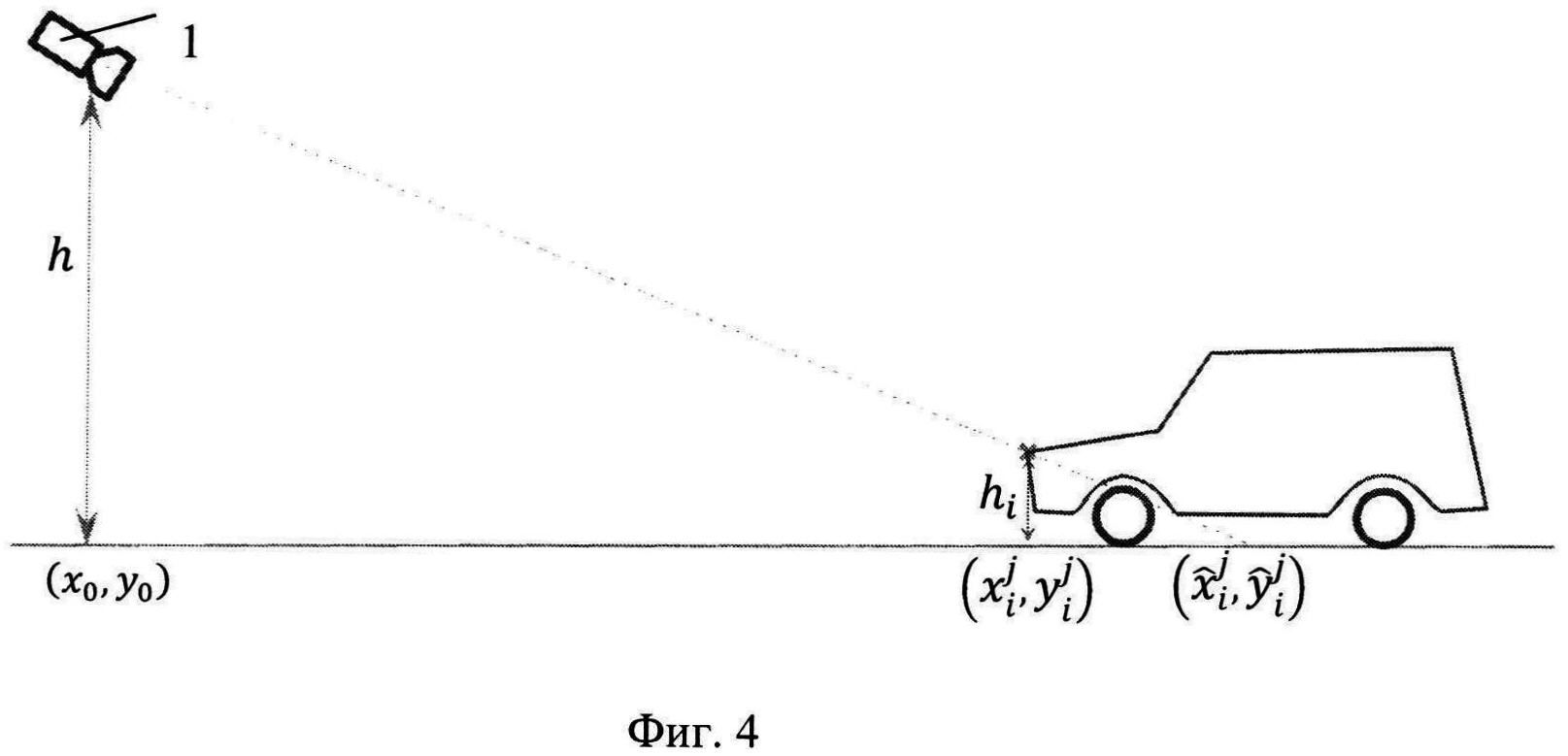
Фиг. 4. Иллюстрация перерасчета центральной проекции  в ортогональную
в ортогональную  выполненная согласно изобретению.
выполненная согласно изобретению.
Элементы:
1 - видеокамера;
2 - электронно-вычислительное устройство.
Рассмотрим более подробно функционирование заявленных системы и способа определения скорости транспортного средства (Фиг. 1-4).
Заявленная система состоит из соединенных между собой видеокамеры 1 и электронно-вычислительного устройства 2.
На этапе калибровки заявленной системы устанавливают соответствие между координатами точек изображения (u, ν) в пикселах и метрическими координатами (x, y) точек дорожного полотна, а также измеряют высоту подвеса h видеокамеры 1 над плоскостью дорожного полотна и определяют проекцию положения видеокамеры 1 на дорогу (x0, y0). В приближении геометрической оптики в рамках модели тонкой линзы (модель тонкой линзы предполагает оптическую систему видеокамеры 1 по оптическим свойствам равной тонкой линзе) преобразование координат (u, ν)→(x, y) выполняют с помощью электронно-вычислительного устройства 2 в соответствии с формулами
где А, В, С, D, Е, F, G, H - коэффициенты, определяемые фокусным расстоянием видеокамеры 1, высотой установки видеокамеры 1 и проекцией точки установки видеокамеры 1 на дорожное полотно, а также углом поворота видеокамеры 1 относительно ее оптической оси, относительно оси подвеса и углом наклона видеокамеры 1 по отношению к дорожному полотну.
В более общем виде преобразование координат определяют с помощью функций
x=f(u,ν),
y=g(u,ν),
где функции f, g могут быть определены на этапе калибровки при вводе заявленной системы в эксплуатацию, например, табличным способом: пространство изображения (u, ν) покрывают сеткой, и в каждой точке сетки геодезическими методами измеряют соответствующие координаты в плоскости дорожного полотна. Плотность сетки и, таким образом, сложность определения калибровочных функций зависит от модели объектива видеокамеры 1 и от степени оптических искажений изображений, получаемых с помощью видеокамеры 1. Для видеокамер с объективами, отвечающими модели тонкой линзы, достаточно четырех точек в сетке, не лежащих на одной прямой, для того чтобы восстановить значения функций f, g в других точках.
Исходные данные в виде (x0, y0), h, x=f(u, ν), y=g(u, ν) используют для оценки скорости, выполняя следующие операции с помощью электронно-вычислительного устройства 2.
На первом шаге на каждом изображении j, сформированном видеокамерой 1, в котором фиксируют номер транспортного средства, выделяют множество точек  , которые соответствуют характерным элементам транспортного средства, где i - индекс характерной точки транспортного средства. В первую очередь к таким точкам относятся элементы автоматически локализуемой и идентифицируемой номерной пластины: координаты отдельных символов, угловые точки рамки номерной пластины. Также к характерным точкам относятся точки контуров элементов конструкции транспортного средства, например фары, решетки радиаторов, лобовые стекла, контуры капотов и т.д., в которых линии контуров пересекаются под значительным углом, что позволяет точнее определять положение этих точек в любых ракурсах. Сам алгоритм выделения характерных точек строится на принципах машинного обучения: параметры критериев отбора, является ли рассматриваемая характерная точка изображения удачной, формируют при подготовке программного обеспечения на основе статистического анализа и оптимизации.
, которые соответствуют характерным элементам транспортного средства, где i - индекс характерной точки транспортного средства. В первую очередь к таким точкам относятся элементы автоматически локализуемой и идентифицируемой номерной пластины: координаты отдельных символов, угловые точки рамки номерной пластины. Также к характерным точкам относятся точки контуров элементов конструкции транспортного средства, например фары, решетки радиаторов, лобовые стекла, контуры капотов и т.д., в которых линии контуров пересекаются под значительным углом, что позволяет точнее определять положение этих точек в любых ракурсах. Сам алгоритм выделения характерных точек строится на принципах машинного обучения: параметры критериев отбора, является ли рассматриваемая характерная точка изображения удачной, формируют при подготовке программного обеспечения на основе статистического анализа и оптимизации.
На втором шаге на основе изображения транспортного средства, формируемого видеокамерой 1, в окрестности характерных точек транспортного средства определяют модель транспортного средства. Если заявленная система и способ имеют доступ к базе данных зарегистрированных в ГИБДД транспортных средств, тогда тип транспортного средства определяют с помощью запроса в эту базу данных. Если заявленная система и способ не имеют доступа к базе данных зарегистрированных в ГИБДД транспортных средств, тогда тип транспортного средства определяют с помощью запроса в базу данных транспортных средств, находящуюся в памяти электронно-вычислительного устройства 2 и содержащую данные о моделях транспортных средств и соответствующих им координатах характерных элементов транспортных средств в окрестности номерной пластины, а в ответ на запрос получают из базы данных в памяти электронно-вычислительного устройства 2 данные о модели транспортного средства. Автоматически оценивают апостериорную вероятность корректности определения модели транспортного средства. Если она достаточно высока, то на основании конструктивных особенностей транспортного средства и справочных данных некоторым из характерных точек  транспортного средства приписывают высоту над дорожным полотном, а для некоторых симметричных элементов кузова транспортного средства, соответствующих парам характерных точек
транспортного средства приписывают высоту над дорожным полотном, а для некоторых симметричных элементов кузова транспортного средства, соответствующих парам характерных точек 
 в силу симметрии расположенных на одной высоте, приписывают расстояние между точками
в силу симметрии расположенных на одной высоте, приписывают расстояние между точками  . Тип информации, приписываемый характерным точкам и парам характерных точек, выбирают по критерию оптимальности решения конечной задачи по оценке скорости с минимальной погрешностью. Это означает, что критерии выбора определяют заранее на этапе машинного обучения перед вводом заявленной системы в эксплуатацию.
. Тип информации, приписываемый характерным точкам и парам характерных точек, выбирают по критерию оптимальности решения конечной задачи по оценке скорости с минимальной погрешностью. Это означает, что критерии выбора определяют заранее на этапе машинного обучения перед вводом заявленной системы в эксплуатацию.
На третьем шаге для каждой из характерных точек  с помощью формул x=f(u,ν), y=g(u,ν) определяют центральные проекции
с помощью формул x=f(u,ν), y=g(u,ν) определяют центральные проекции  этих характерных точек на плоскость дороги относительно точки крепления видеокамеры 1.
этих характерных точек на плоскость дороги относительно точки крепления видеокамеры 1.
На четвертом шаге для характерных точек  с известной высотой hi ортогональную проекцию на плоскость дорожного полотна определяют по формулам
с известной высотой hi ортогональную проекцию на плоскость дорожного полотна определяют по формулам
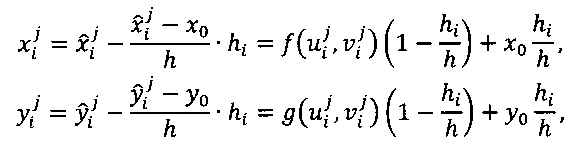
которые следуют из подобия треугольников, показанных на Фиг. 4.
На пятом шаге для симметричных пар характерных точек 
 между которыми известно расстояние
между которыми известно расстояние  в мировом пространстве и которые в силу симметрии расположены на одной высоте
в мировом пространстве и которые в силу симметрии расположены на одной высоте  над плоскостью дорожного полотна, соответствующие ортогональные проекции на плоскость дороги
над плоскостью дорожного полотна, соответствующие ортогональные проекции на плоскость дороги 
 определяют на основании системы уравнений, составленной из соотношений, выведенных в на предыдущем шаге:
определяют на основании системы уравнений, составленной из соотношений, выведенных в на предыдущем шаге:
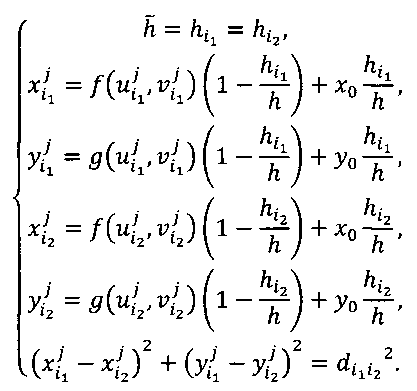
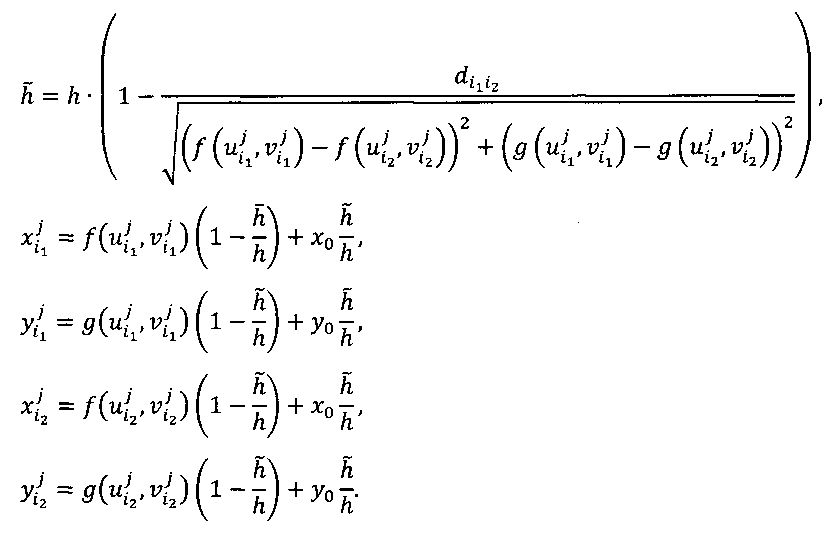
Предполагая, что точка крепления видеокамеры 1 располагается выше транспортного средства, т.е.  в результате решения данной системы получают следующий результат:
в результате решения данной системы получают следующий результат:
На шестом шаге после выделения характерных точек изображения  и вычисления соответствующих им ортогональных проекций
и вычисления соответствующих им ортогональных проекций  сопоставляют одинаковые характерные точки на последовательных кадрах видеоизображения, при этом выделяют набор траекторий {Tk} движения характерных точек транспортного средства, где Tk на каждом кадре j соответствует проекция одной из характерных точек на плоскость дорожного полотна. Проводят статистический анализ данных для траекторий {Tk}, при этом удаляют из данного множества траекторий те траектории, которые не соответствуют модели движения твердого тела. В результате выделяют множество траекторий {Tl}, являющихся подмножеством {Tk}, движение которых согласовано в рамках модели движения твердого тела.
сопоставляют одинаковые характерные точки на последовательных кадрах видеоизображения, при этом выделяют набор траекторий {Tk} движения характерных точек транспортного средства, где Tk на каждом кадре j соответствует проекция одной из характерных точек на плоскость дорожного полотна. Проводят статистический анализ данных для траекторий {Tk}, при этом удаляют из данного множества траекторий те траектории, которые не соответствуют модели движения твердого тела. В результате выделяют множество траекторий {Tl}, являющихся подмножеством {Tk}, движение которых согласовано в рамках модели движения твердого тела.
На седьмом шаге из всех траекторий {Tl} движения характерных точек транспортного средства формируют одну траекторию Т движения транспортного средства на плоскости дорожного полотна, которая в каждом кадре j составлена из точек, соответствующих геометрическому центру точек траекторий {Tl} на данном кадре. Усреднение позволяет уменьшить случайную погрешность позиционирования транспортного средства на дорожном полотне в  раз, где
раз, где  - количество отобранных на предыдущем шаге траекторий. В среднем для транспортных средств выделяют более четырех характерных точек, которые можно с высокой степенью надежности отследить на множестве кадров видеоизображения, поэтому данный шаг позволяет более чем в 2 раза уменьшить погрешность конечной оценки скорости.
- количество отобранных на предыдущем шаге траекторий. В среднем для транспортных средств выделяют более четырех характерных точек, которые можно с высокой степенью надежности отследить на множестве кадров видеоизображения, поэтому данный шаг позволяет более чем в 2 раза уменьшить погрешность конечной оценки скорости.
На восьмом шаге для геометрических центров {(-Xj, Yj)}, соответствующих траектории T, проводят операцию статистического анализа, при этом оценивают скорость транспортного средства ν на основе данных (Xj, Yj) и временных метках кадров tj. Одним из способов такого анализа является нахождение коэффициентов линейной регрессии (νx, νy) для соответствующих последовательностей значений {{Xj, tj)} и {(Yj, tj)} методом наименьших квадратов, который позволяет уменьшить случайную погрешность оценки проекции скорости (νx, νy) на плоскость дорожного полотна в  раз по сравнению с разностной формулой на основе лишь первого и последнего отсчетов, где N - количество точек в траектории T. Соответственно, в
раз по сравнению с разностной формулой на основе лишь первого и последнего отсчетов, где N - количество точек в траектории T. Соответственно, в  раз уменьшится случайная погрешность оценки модуля скорости, вычисляемой по формуле
раз уменьшится случайная погрешность оценки модуля скорости, вычисляемой по формуле
При типичной установке заявленной системы транспортное средство находится в поле зрения N=10 кадров видеоизображения даже при высокой скорости движения транспортного средства, т.е погрешность определения скорости дополнительно уменьшается в 3 раза.
Точность оценки высоты характерных точек транспортного средства над дорожным полотном, определенной на основе распознавания марки транспортного средства, может быть в два раза выше по сравнению со способами оценки высоты, применяемыми в аналоге и прототипе, описанных соответственно в патентах RU 2419884 и GB 2503328. С учетом дополнительного выигрыша, получаемого с помощью вычисления центра масс выявленных характерных точек (от 2 раз) и с помощью статистической обработки, например, методом наименьших квадратов (от 3 раз) итоговый выигрыш в точности по сравнению с аналогом и прототипом, описанным соответственно в патентах RU 2419884 и GB 2503328, превышает 10, т.е. относительная погрешность оценки скорости с помощью заявленного способа менее 1%, если принять за данность, что относительная погрешность оценки скорости методом прототипа, описанного в патенте GB 2503328, достигает 8%.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.

Устройство коммуникационного интерфейса для сети spacewire
Устройство видеонаблюдения
Система и способ трехмерной визуализации яркостной радиолокационной карты местности
Система и способ идентификации транспортных средств, противоправно вторгшихся на выделенную полосу
Рлс с программируемой временной диаграммой и способ ее функционирования
Система и способ определения нарушений правил дорожного движения при проезде перекрестка
Ядро сопроцессора быстрого преобразования фурье реального времени
Радиационно-стойкая библиотека элементов на комплементарных металл-окисел-полупроводник транзисторах
Способ и устройство ввода, обработки и вывода видеоизображения
Система регулирования уличного освещения и определения правонарушений и внештатных происшествий
Устройство коммуникационного интерфейса для сети spacewire
Устройство видеонаблюдения
Система и способ трехмерной визуализации яркостной радиолокационной карты местности
Система и способ идентификации транспортных средств, противоправно вторгшихся на выделенную полосу
Рлс с программируемой временной диаграммой и способ ее функционирования
Система и способ определения нарушений правил дорожного движения при проезде перекрестка
Ядро сопроцессора быстрого преобразования фурье реального времени
Радиационно-стойкая библиотека элементов на комплементарных металл-окисел-полупроводник транзисторах
Способ и устройство ввода, обработки и вывода видеоизображения
Система регулирования уличного освещения и определения правонарушений и внештатных происшествий

