Результат интеллектуальной деятельности: СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОВЫМИ И ГАЗОКОНДЕНСАТНЫМИ СКВАЖИНАМИ
Вид РИД
Изобретение
Изобретение относится к области добычи газа, а именно к способам управления режимами работы газодобывающей скважины.
Известен способ управления режимами работы газовой скважины, в котором добычу газа осуществляют с ограничением отбора газа, поступающего из межтрубного пространства, путем дросселирования с поддержанием постоянного перепада давления с помощью автоматического управляющего комплекса, в котором анализируют полученные данные и подают команду на автоматический регулирующий клапан расхода газа, оптимизируя суммарный дебет скважины в соответствии с определенной зависимостью с учетом фильтрационных сопротивлений скважины (см., например, патент RU №345266, A1 01.01.1972).
Недостатком известного способа эксплуатации газовых скважин является то, что он не обеспечивает оптимальный уровень управления режимами работы и имеет невысокий ресурс технических средств элементов автоматики.
В качестве прототипа выбран способ для управления потоками в скважине, описанный в патенте RU №2513942 С2, 27.01.2014.
В известном способе для управления режимами работы газовой скважины с ограничением отбора газа, поступающего из межтрубного пространства, путем дросселирования с поддержанием постоянного перепада давления с помощью автоматического управляющего комплекса, анализируют полученные данные и подают команды на автоматический регулирующий клапан расхода газа, оптимизируя суммарный дебет скважины в соответствии с определенной зависимостью и с учетом фильтрационных сопротивлений скважины.
Достоинством прототипа является более высокая точность поддержания постоянства выходных потоков.
Недостатком прототипа, так же, как и аналога, является невысокий ресурс технических средств элементов автоматики. Кроме того, в процессе эксплуатации газовой скважины меняются физические характеристики добываемого из скважины газа, меняется давление газа и расход (дебет) скважины. Это требует перенастройки системы управления добычей газа. В аналоге и прототипе это не предусмотрено.
Задачей изобретения является повышение ресурса технических средств элементов автоматики.
Техническим результатом изобретения является оптимизация адаптивной системы автоматического управления газодобывающей скважины с поддержанием требуемой высокой точности давления выходного газа в условиях изменяющегося расхода газа и изменяющихся параметров самой газодобывающей скважины и обеспечение высокого ресурса технических средств элементов автоматики.
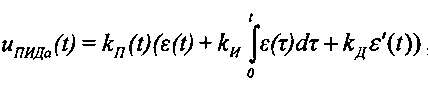
Технический результат достигается за счет того, что в способе управления режимами работы газовой скважины с ограничением отбора газа, поступающего из межтрубного пространства, путем дросселирования с поддержанием постоянства перепада давления с помощью автоматического управляющего комплекса, в котором анализируют полученные данные и подают команды на автоматический регулирующий клапан расхода газа, оптимизируя суммарный дебет скважины в соответствии с определенной зависимостью с учетом фильтрационных сопротивлений скважины, согласно изобретению управление режимами работы газодобывающей скважины формируют на основе адаптивного импульсного регулятора, воздействующего на временной квантователь, в котором происходит фиксация величины управляющего сигнала uимi(t) в течение заданного периода (кванта) времени с последующим воздействием на исполнительный механизм, управляющий регулирующим клапаном, меняющим количество газа, поступающего в коллектор, следя за квантованным сигналом uкв, при этом адаптивный регулятор имеет закон регулирования
 ,
,
где kИ, kД - коэффициенты соответственно интегральной и пропорциональной составляющих ПИД закона регулирования, kП(t) - общий коэффициент передачи, который изменяется в соответствии с уравнениями:
kП(t)=kн+γy(t),
Tay′(t)+y(t)=uПИДа,кв(t),
где время фильтрации Та рассчитывается в условных единицах, а kн>0 и γ>0 - настраиваемые параметры адаптивного регулятора.
Управление режимами работы газодобывающей скважины на основе адаптивного импульсного регулятора, воздействующего на временной квантователь, в котором происходит фиксация величины управляющего сигнала uимi(t) в течение заданного периода (кванта) времени с последующим воздействием на исполнительный механизм, управляющим регулирующим клапаном, меняющим количество газа, поступающего в коллектор, следя за квантованным сигналом икв, при котором адаптивный регулятор имеет закон регулирования ,
где kИ, kД - коэффициенты соответственно интегральной и пропорциональной составляющих ПИД закона регулирования, kП(t) - общий коэффициент передачи, который изменяется в соответствии с уравнениями:
kП(t)=kн+γy(t),
Tay′(t)+y(t)= uПИДа,кв(t),
где время фильтрации Та рассчитывается в условных единицах, а kн>0 и γ>0 - настраиваемые параметры адаптивного регулятора, позволяет поддерживать требуемую высокую точность давления выходного газа в условиях изменяющегося расхода газа и изменяющихся параметров самой газодобывающей скважины и обеспечивает высокий ресурс технических средств элементов автоматики.
Изобретение иллюстрируется 11 фигурами.
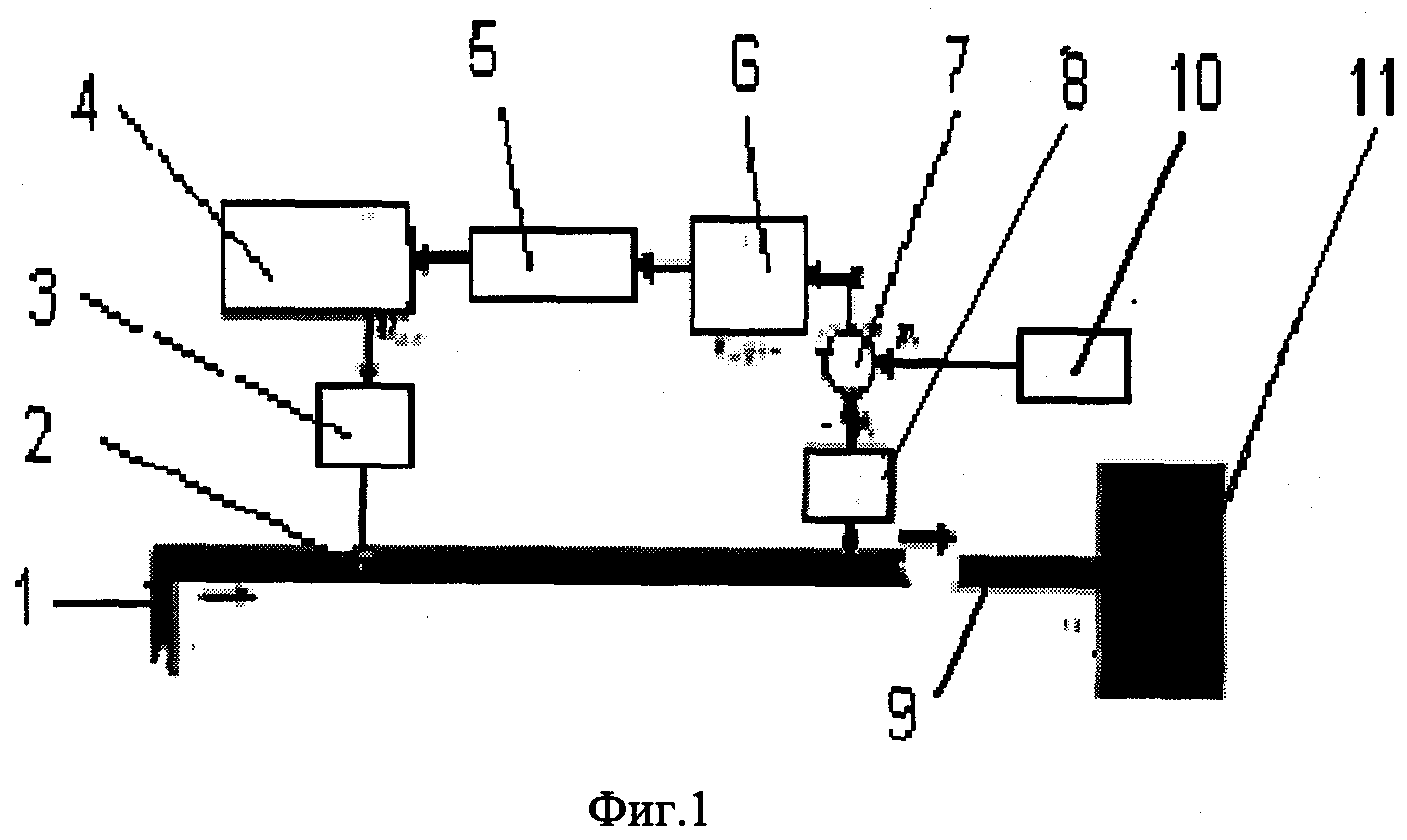
На фиг. 1 изображена структурная схема газодобывающей скважины.
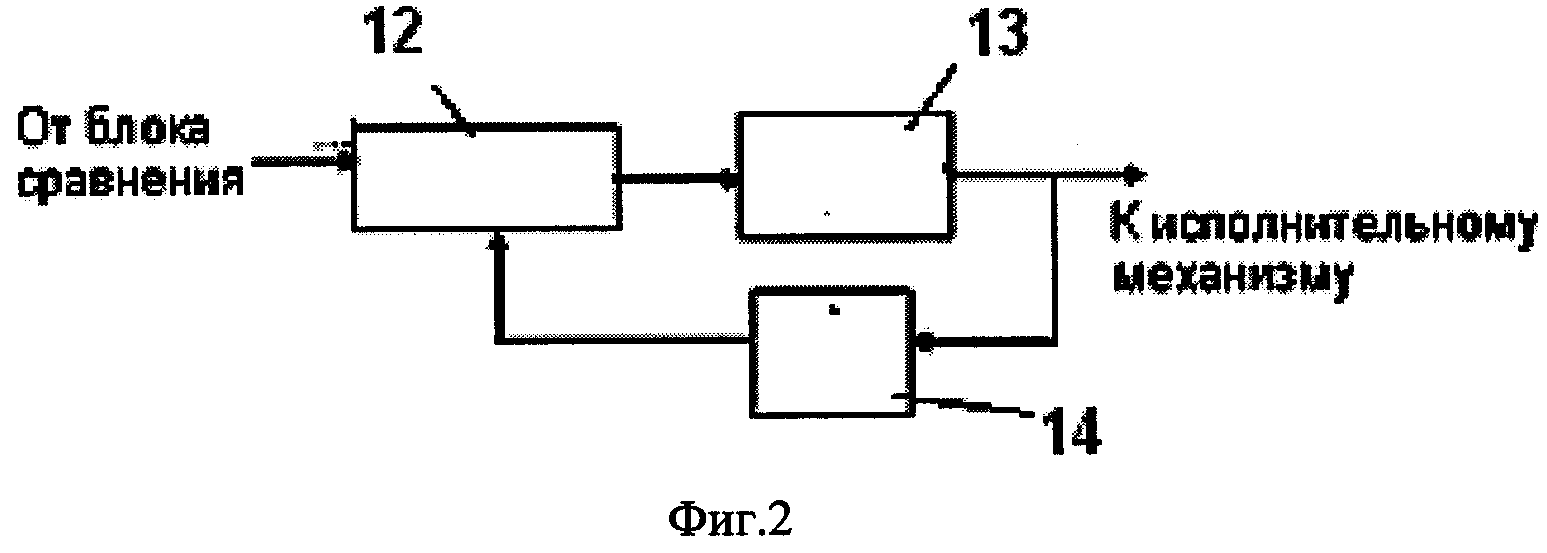
Фиг. 2 демонстрирует принципиальную структурную схему управляющих звеньев.
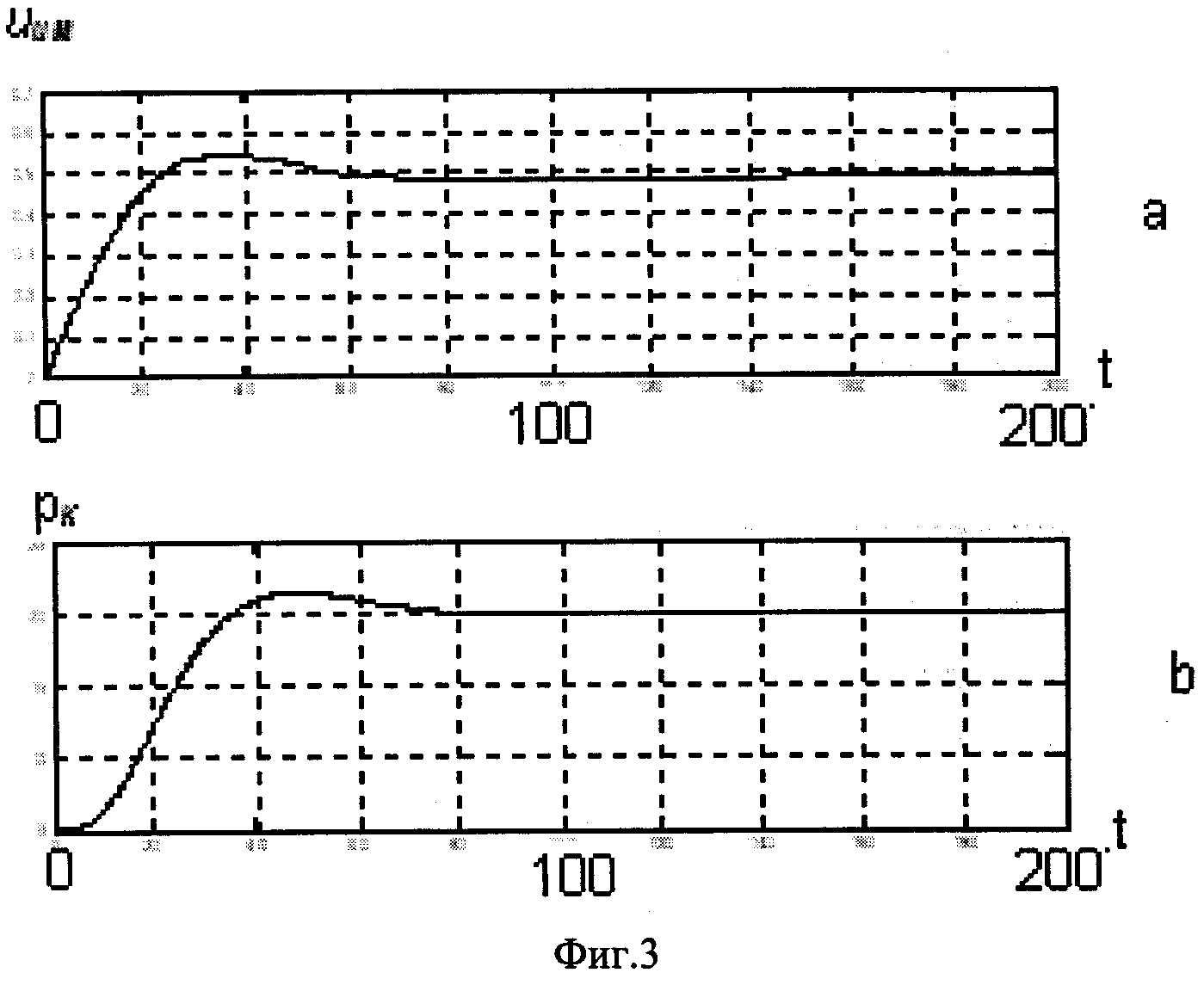
На фиг. 3 представлено: (график а) изменение uим - сигнала управления исполнительным механизмом регулирующего клапана при воздействии обычного адаптивного ПИД-регулятора; переходной процесс изменения давления Рк (график b) с дискретизацией 0,01 с в реальном времени t, с.
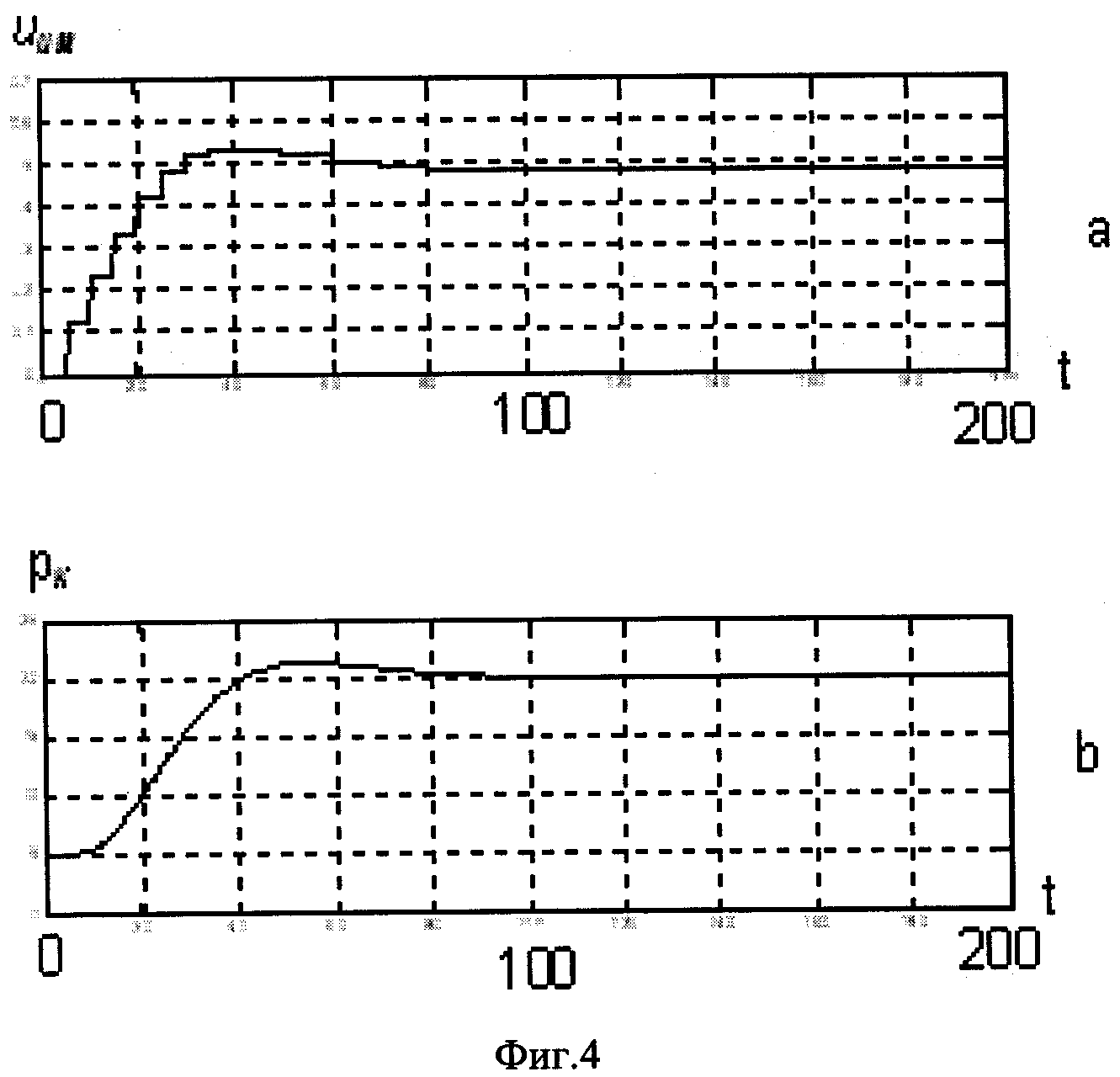
На фиг. 4 имеется график, аналогичный фиг. 3, переходного процесса при использовании обычного адаптивного ПИД-регулятора с дискретизацией 5 с в реальном времени t, с.
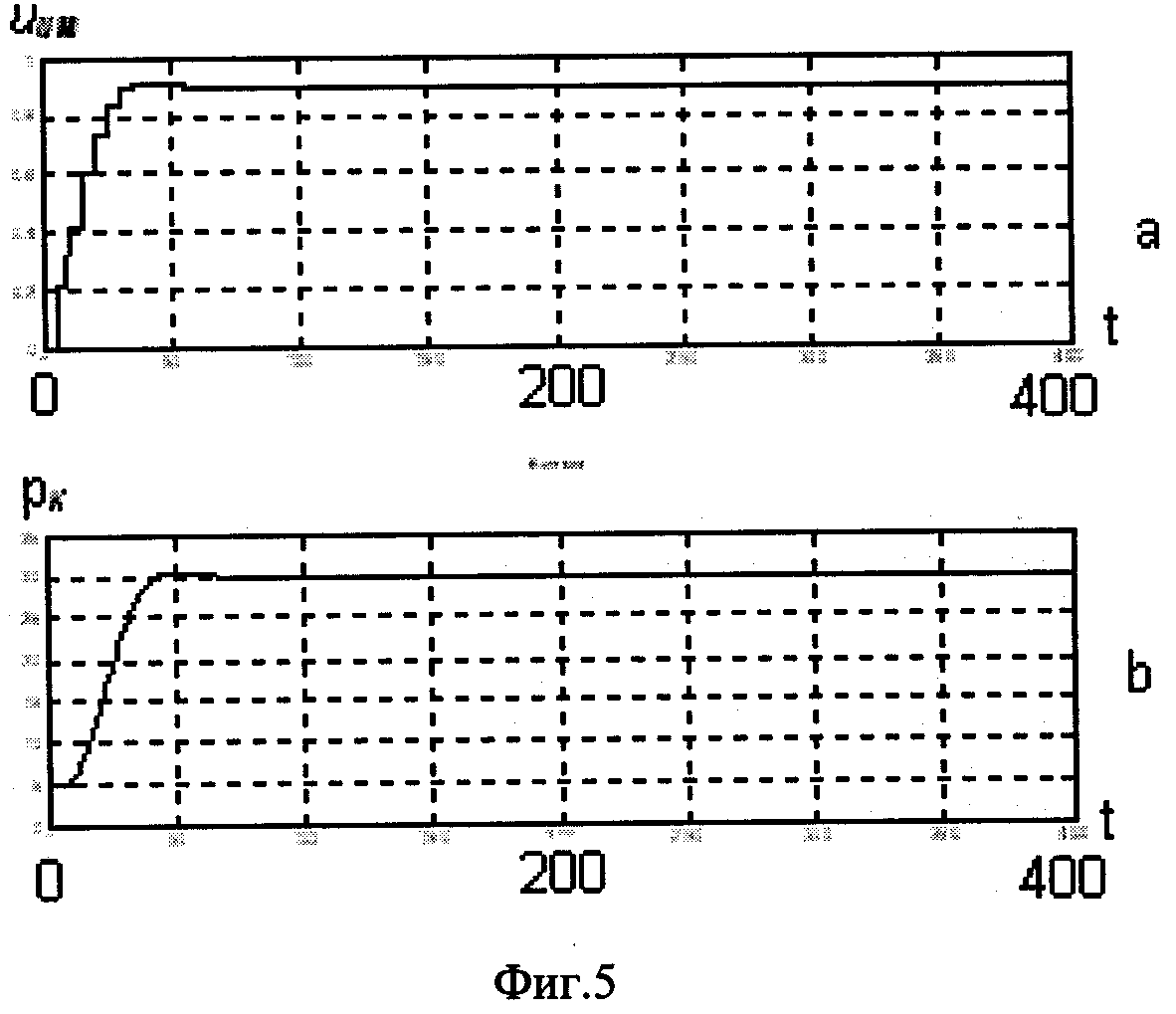
На фиг. 5 виден переходной процесс при измененных параметрах: uим - сигнала управления исполнительным механизмом (график а); обычного адаптивного ПИД-регулятора и переходной процесс изменения давления Рк (график b) с дискретизацией 0,01 с в реальном времени t, с.
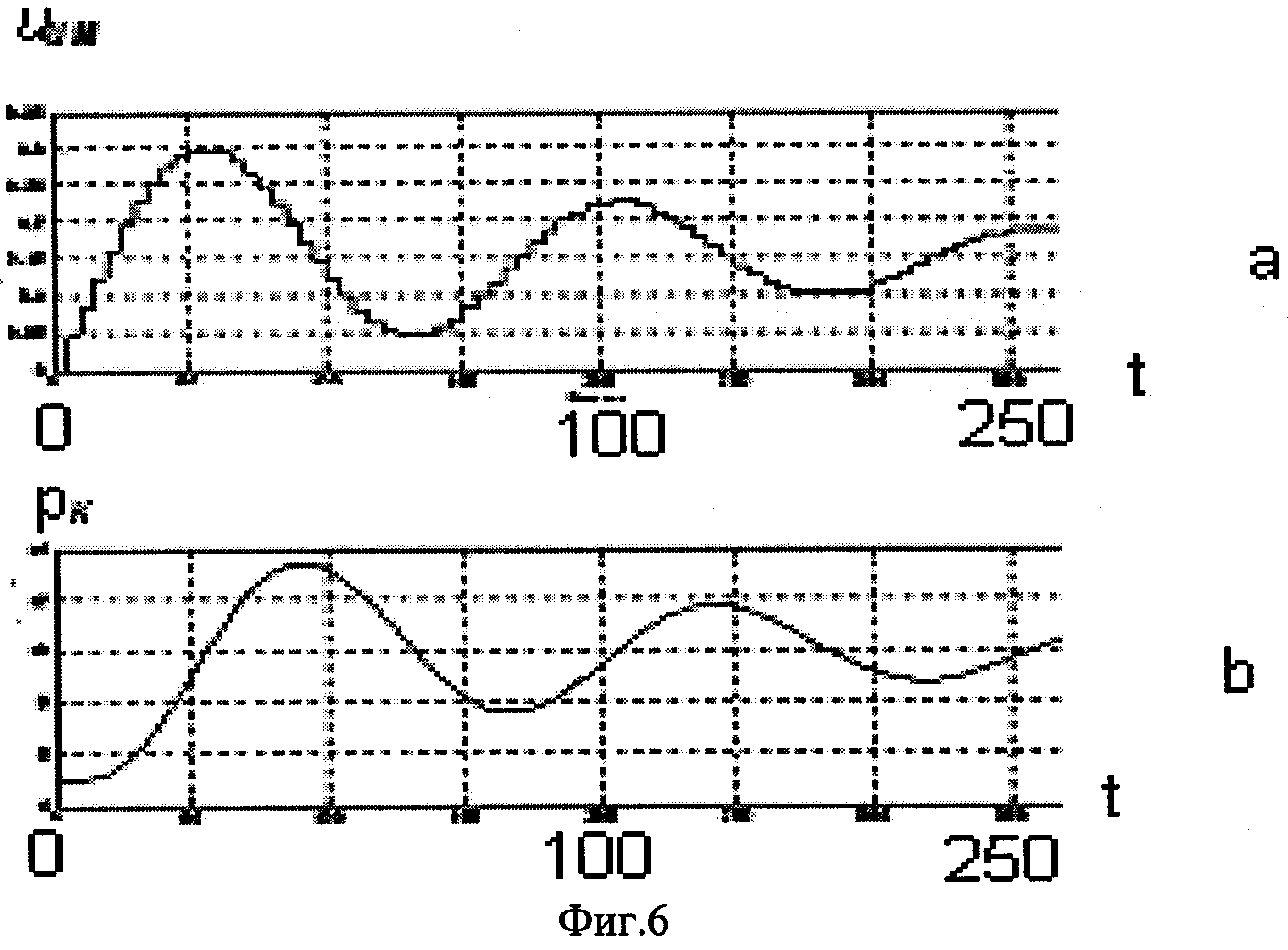
На фиг. 6 имеется переходной процесс изменения давления рЗПА до заданного значения давления ркз=10 (график b) при начальном uим=0 график (а). Настройки ПИД-регулятора те же, что и на фиг. 5. Временной квантователь работал с дискретизацией 5 с.
На фиг. 7 - переходные процессы в реальном времени: (а) для uим при отработке давления (b) рЗПА с измененными параметрами обычного ПИД-регулятора.
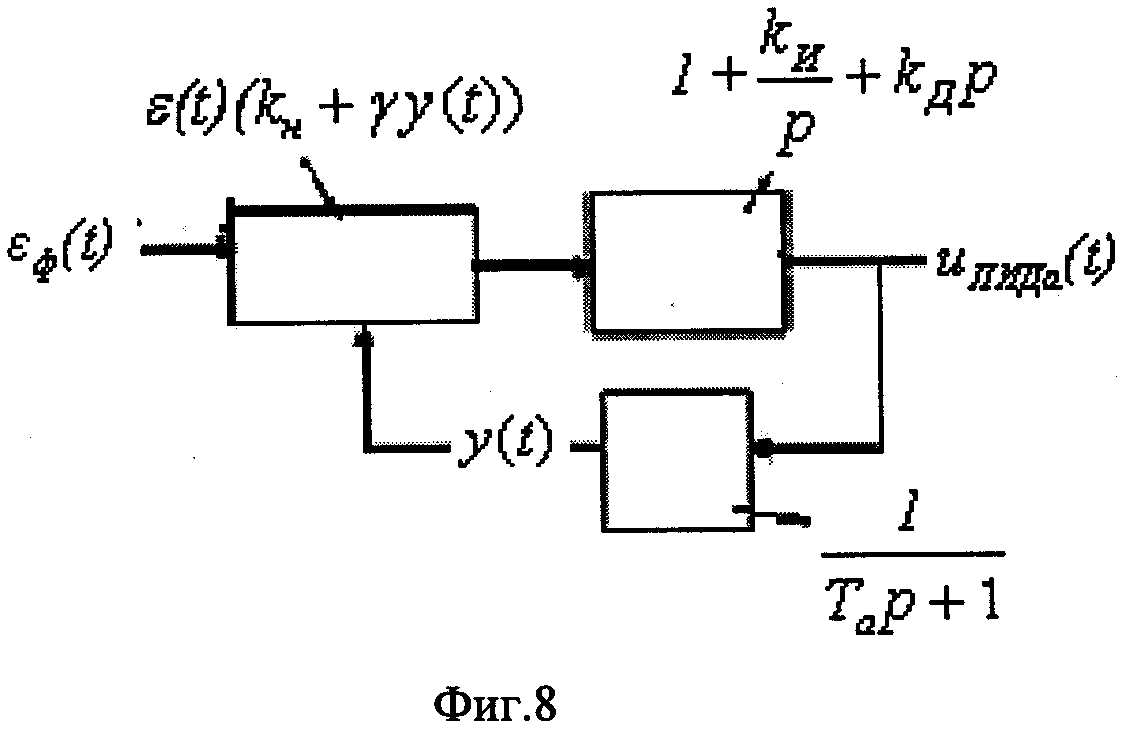
На фиг. 8 имеется структурная схема устройства адаптивного управления с ПИД-регулятором, с предлагаемым в данной заявке законом управления.
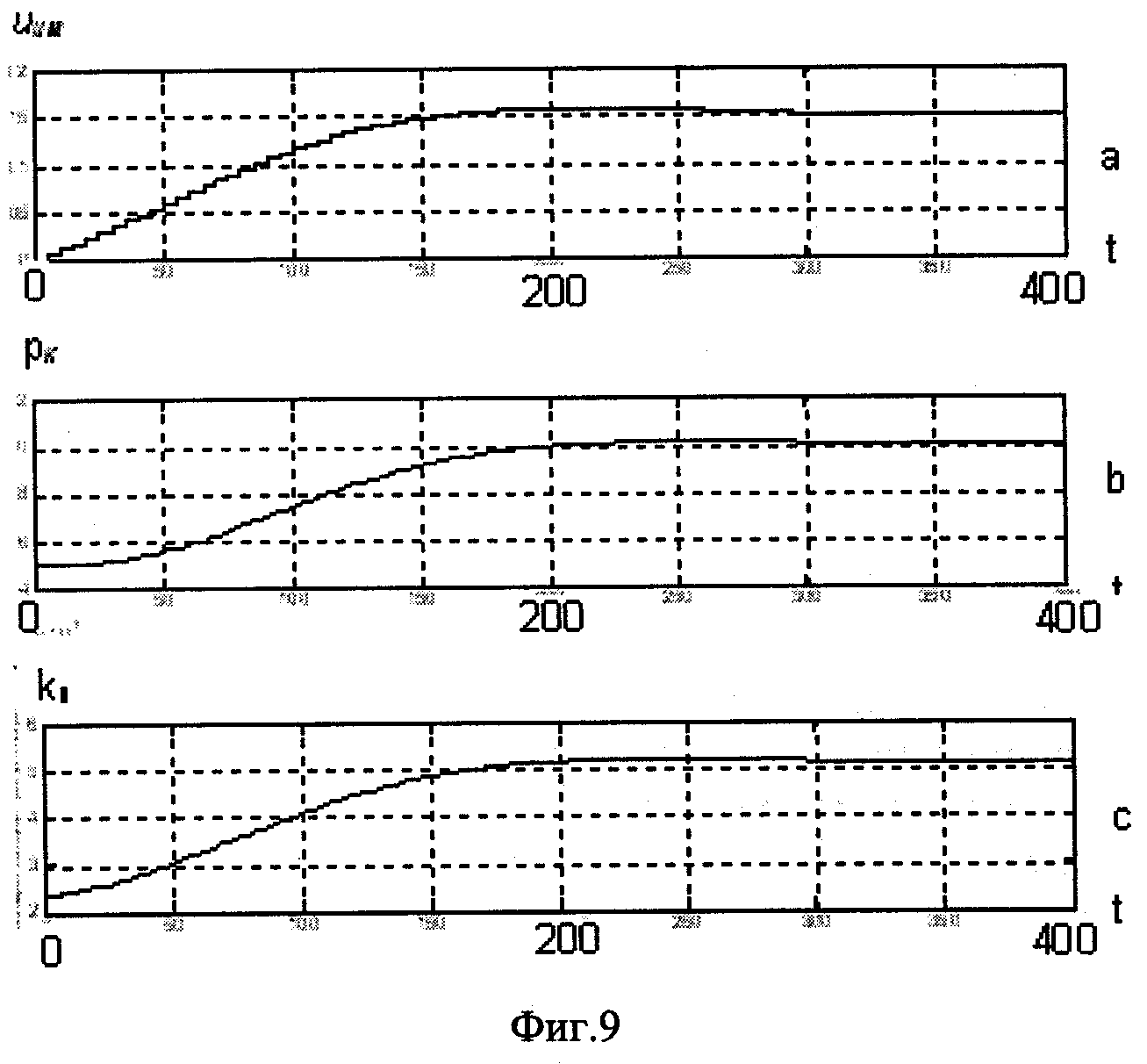
На фиг. 9 дается представление о переходном процессе изменения давления в коллекторе скважины до заданного значения в системе, в которой обычный адаптивный ПИД-регулятор заменен предлагаемым адаптивным регулятором: а) uим - сигнал управления исполнительным механизмом регулирующего клапана; b) Рпд - призабойное давление uим - сигнал управления исполнительным механизмом регулирующего клапана; с) общий коэффициент передачи kп. Процесс показан в реальном времени t, с.
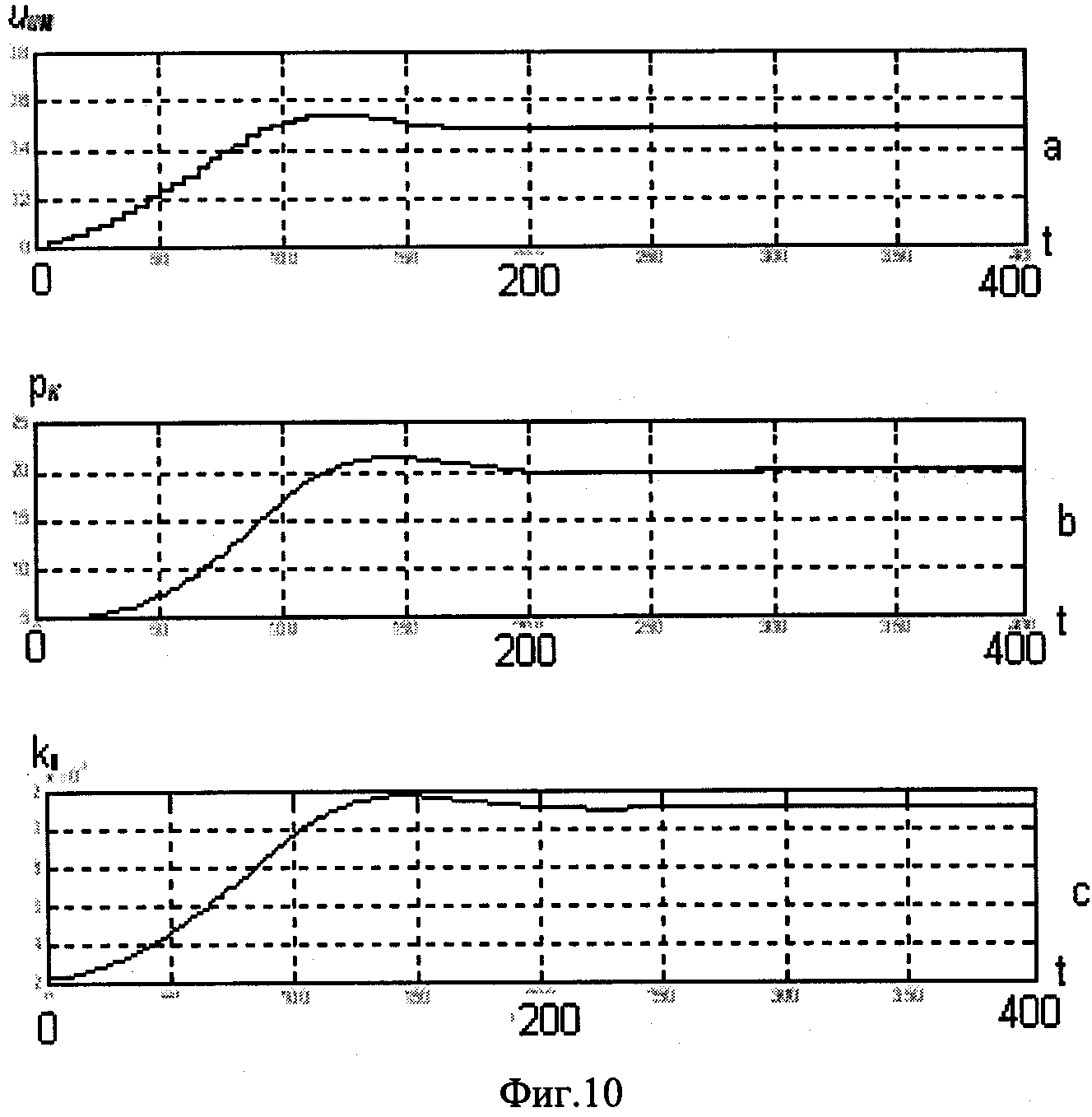
На фиг. 10 показан переходной процесс в реальном времени t, с, аналогичный фиг. 9, при отработке давления рк(b) в коллекторе с другими значениями uим(а), kп(с).
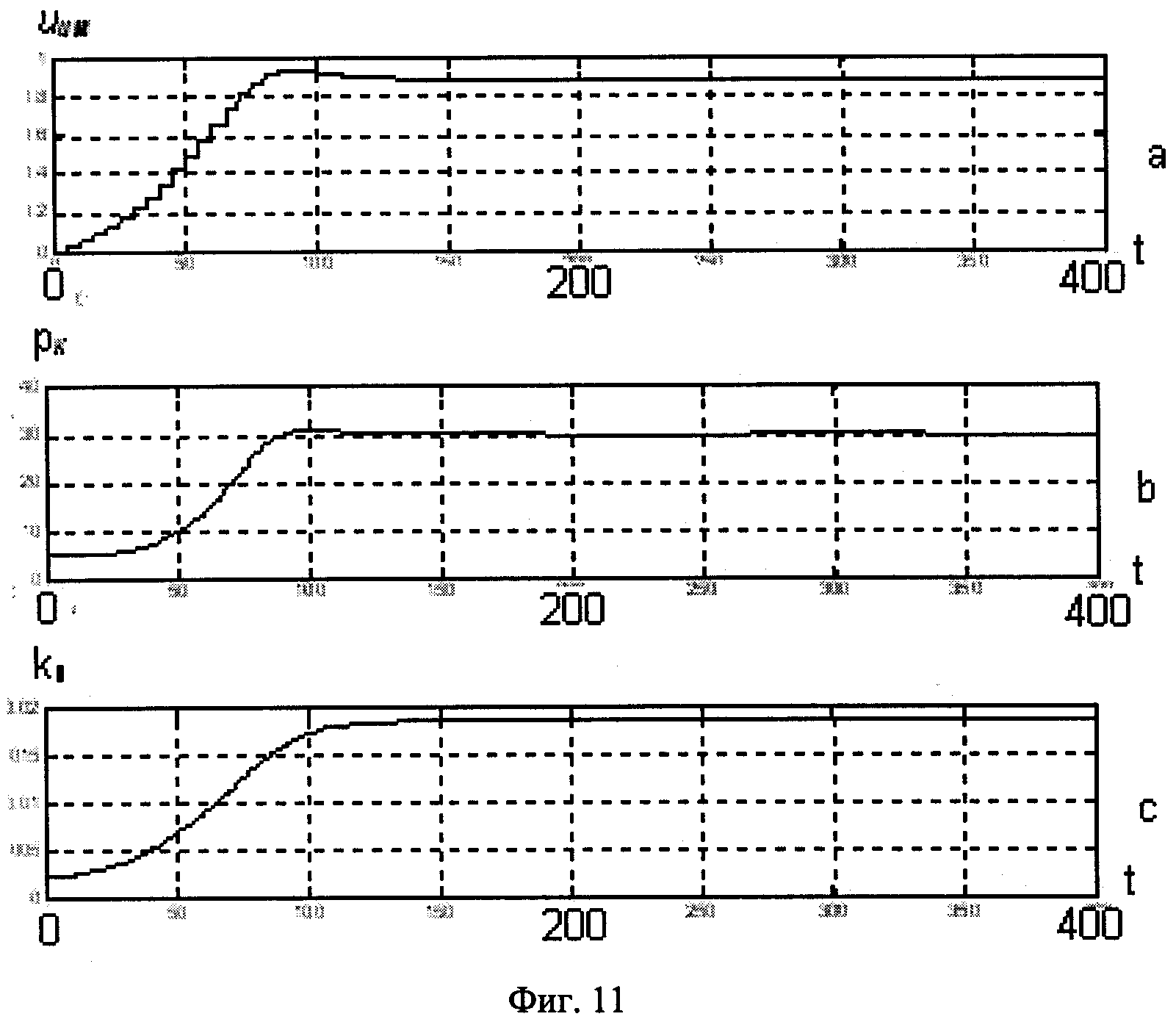
На фиг. 11 представлен переходные процессы изменения давления рк(b) в коллекторе аналогичный фиг. 9 и 10 при измененных начальных значениях uим(а), kп(с).
Оптимальная система адаптивного автоматического управления газовых и газоконденсатных скважин устроена следующим образом. Поток газа 1 (фиг. 1) из скважины проходит через регулирующий клапан 2, который связан с исполнительным механизмом 3. Последний находится под воздействием реле времени с задержкой включения (РВЗВ) 4 адаптивного регулятора 5 и сглаживающего фильтра 6. В свою очередь, сглаживающий фильтр 6 сочленен с блоком сравнения 7, реагирующего на сигнал с датчика давления 8, находящегося в потоке газа в (коллекторе) 9 после регулирующего клапана и задатчика давления 10. После регулирующего клапана 2 газ поступает в блок переключающей аппаратуры 11. Регулирующий клапан 2 может изменять проходное сечение и, тем самым, изменять количество газа, проходящего по коллектору.
Адаптивный регулятор 5, в свою очередь, содержит блок адаптации 12 (фиг. 2), блок вычисления ПИД закона управления 13 и фильтр 14. Первым входом блока адаптации 12 является сигнал адаптивного регулятора 5. Выход блока адаптации 12 соединен с входом блока вычисления ПИД - закона управления 13. Выход блока вычисления ПИД - закона управления 13 является выходом адаптивного регулятора 5 и соединен с входом фильтра 14. Выход фильтра 14 подключен ко второму входу блока адаптации 12. Переходные процессы моделировались при различных параметрах обычной системы регулирования с различными параметрами системы управления и при изменении времени дискретизацией дискредитации (фиг. 4, 5, 6, 7).
Управление системой с адаптивным регулятором с законом регулирования

осуществляется на основе структурной схемы, согласно фиг. 8. Общий коэффициент передачи kП(t) изменяется в соответствии с уравнениями:
kП(t)=kн+γy(t),
Tay′(t)+y(t)=uПИДа,кв(t),
где Ta>50 условных единиц,
kн>0 и γ>0 - настраиваемые параметры адаптивного регулятора, a y(t) - оценка положения исполнительного механизма.
Фигуры 9, 10, 11 дают наглядное представление о том, что переходные процессы проходят более гладко, отсутствуют колебания, а число включений становится на несколько порядков меньше при использовании предлагаемого оптимального адаптивного ПИД-регулятора.
В описании изобретения приняты следующие обозначения:
Рпд - призабойное давление;
Ρс - давление газа перед регулирующим клапаном;
Рк - давление газа после регулирующего клапана;
Ρкз - задание на давление газа;
Pзпа - давление газа во входном коллекторе ЗПА;
qc - расход газа из скважины
qк - расход газа после регулирующего клапана;
uим - сигнал управления исполнительным механизмом регулирующего клапана.
Способ адаптивного автоматического управления газовых и газоконденсатных скважин действует следующим образом. Задатчик давления 10 (фиг. 1, 2) вырабатывает требуемое значение давления газа в коллекторе. В блоке сравнения 7 происходит сравнение заданного значения давления с текущим значением, генерируемым в датчике 8, давления в коллекторе, которое поступает с датчика давления 8, измеряющего давление в коллекторе 9. Сигнал рассогласования (ошибки), полученный в блоке сравнения 7, поступает на сглаживающий фильтр 6, в котором сглаживаются шумы измерения датчика давления 8. Отфильтрованный сигнал рассогласования поступает на вход адаптивного регулятора 5, который вырабатывает сигнал управления. Сигнал управления с выхода адаптивного регулятора 5 поступает на временной квантователь 4, в котором происходит фиксация величины управляющего сигнала в течение заданного периода (кванта) времени. Квантованный управляющий сигнал с выхода временного квантователя 4 поступает на исполнительный механизм 3, который, воздействуя на регулирующий клапан 2, меняет количество газа поступающего в коллектор 9.
Оценка эффективности оптимальной системы адаптивного автоматического управления газовых и газоконденсатных скважин проводилась на основе сопоставления с известным автоматическим управляющим комплексом прототипа. Так, на фиг. 3 представлен переходной процесс при отработке давления рк в коллекторе скважины от значения рЗПА, соответствующего uим=0, до заданного значения давления ркз=20. В качестве регулятора использовался ПИД-регулятор с передаточной функцией вида
 ,
,
где kП=0,019, а kИ=0,1, kД=2.
Временной квантователь работал с дискретизацией 0.01 с. При этом число изменений uим, равнялось 110, интегральная ошибка - 3615, время установления давления - 78 с, коэффициент перерегулирование составил - 1,47.
Фиг. 4 показывает как изменится переходной процесс при отработке давления рк в коллекторе скважины от значения рЗПА при uим=0 до заданного значения давления ркз=20. В качестве регулятора использовался также ПИД-регулятор с настройками kП=0,016, а kИ=0,09, kД=2. Временной квантователь работал с дискретизацией 5 с. При этом число изменений uим равнялось 13, интегральная ошибка - 4463, время установления давления - 88 с, коэффициент перерегулирование - 1,27.
Из сравнения переходных процессов фиг. 3 и фиг. 4 видно, что введение в контур управления временного квантователя позволяет, существенно уменьшив число включений исполнительного органа, практически не ухудшить качественные показатели работы ПИД систем управления.
Моделируется работа системы управления с ПИД-регулятором с постоянными настройками при различных значениях технологических параметров.
На фиг. 5 - переходной процесс при отработке давления рк в коллекторе скважины от значения рЗПА при uим=0 до заданного значения давления ркз=30. Регулятором был ПИД-регулятор с настройками kП=0,018, а kИ=0,08, kД=2,4. Временной квантователь работал с дискретизацией 5 с.
На фиг. 6 - переходной процесс при отработке давления рк в коллекторе скважины от значения рЗПА при uим=0 до заданного значения давления ркз=10. Настройки ПИД-регулятора те же, что и на процессах фиг. 5, т.е. kП=0,018, а kИ=0,08, kД=2,4. Временной квантователь работал с дискретизацией 5 с. Из фиг. 6 следует, что при сохранении настроек регулятора в переходном процессе возникают колебания и качество системы управления становится хуже.
На фиг. 7 переходной процесс отработки давления рк в коллекторе скважины при ркз=10. В этом случае с целью обеспечения устойчивости в контуре управления настроечные параметры регулятора были взяты равными kП=0,005, а kИ=0,09, kД=2,2. Таким образом, для сохранения качества регулирования нужно менять общий коэффициент усиления в регуляторе.
Из графиков фиг. 3-7 можно сделать два вывода:
1) введение квантования по времени практически не ухудшило качественных показателей работы рассмотренной системы управления в сравнении с качественными показателями работы обычного ПИД-регулятора с высокой частотой изменения сигнала управления;
2) при уменьшении давления газа в коллекторе существенным образом меняются параметры технологического объекта управления, которые при постоянстве настроек регулятора приводят к потере устойчивости системы управления.
Из первого вывода следует целесообразность введения в состав системы управления временного квантователя, наличие которого из-за существенного уменьшения числа включений исполнительного механизма, позволит многократно увеличить его ресурс. Из второго вывода следует необходимость использования в контуре управления адаптивного регулятора, который мог бы в процессе эксплуатации технологического процесса оценивать изменяющиеся параметры и по результатам оценок оптимальным образом корректировать настройки регулятора с тем, чтобы во всех возможных режимах работы скважины гарантированно обеспечить устойчивое и качественное регулирование.
Адаптивное управление осуществлялось на основе модели фиг. 8, в которой обычный ПИД-регулятор заменен адаптивным регулятором с законом регулирования

общий коэффициент передачи kП(t), в котором изменяется в соответствии с уравнениями:

Tay′(t)+y(t)=uПИДа,кв(t),
где Та>50 условных единиц,
где kн>0 и γ>0 - настраиваемые параметры адаптивного регулятора, a y(t) - оценка положения исполнительного механизма.
На фиг. 8 изображена блок-схема адаптивного ПИД-регулятора, который входит в качестве регулятора в блок-схему фиг. 1.
Проверка использования блока адаптации проводилась на основе моделирование его работы при различных значениях технологических параметров.
На фиг. 9 изображен переходной процесс при отработке давления рк в коллекторе скважины от значения рЗПА при uим=0 до заданного значения давления ркз=10. Начальное значение kн=0,0024, конечное значение, найденное в режиме адаптации, kП(t)=kн+γuПИДа(t)=0,005125. На верхнем графике фиг. 9 изображен сигнал управления uим, на среднем - давления рк, на нижнем - изменение в переходном процессе общего коэффициента регулятора kП(t). Из графиков фиг. 9 следует, что процесс, который при настройках, соответствующих фиг. 6, был неустойчив, за счет адаптации стал не только устойчивым, но и достаточно качественным.
Время переходного процесса фиг. 9 составляет примерно 170 условных единиц, в то время как оптимально настроенный процесс фиг. 7 длился примерно 200 условных единиц.
На фиг. 10 - переходной процесс при отработке давления рк в коллекторе куста скважин от значения рЗПА при uим=0 до заданного значения давления ркз=20. Начальное значение kн=0,0024, конечное значение, найденное в режиме адаптации, kП(t)=kн+γua(t)=0,01115. На верхнем графике фиг. 10 - сигнал управления uим, на среднем - давление рк, на нижнем - изменение в переходном процессе общего коэффициента регулятора kП(t). Процессы адаптивного управления, имеющиеся на фиг. 10, в этом случае несколько уступают по быстродействию процессам фиг. 4, т.к. в случае фиг. 4 общий коэффициент усиления kП в начальный момент переходного процесса выбирался из расчета высокого быстродействия системы управления и равнялся 0,016, в то время как в случае адаптивного управления начальное значение kП(0)=0,0024, которое затем в процессе работы увеличилось примерно в 5 раз.
На фиг. 11 - переходной процесс при отработке давления рк в коллекторе куста скважин от значения рЗПА при uим=0 до заданного значения давления ркз=30. Начальное значение kн=0,0024, конечное значение, найденное в режиме адаптации, kП(t)=kн+γua(t)=0,0185. На верхнем графике фиг. 11 - сигнал управления uим, на среднем - давление рк, на нижнем - изменение в переходном процессе общего коэффициента регулятора kП(t). Процессы адаптивного управления, как и в предыдущем случае, по быстродействию несколько уступают аналогичным процессам фиг. 5 по тем же причинам, о которых говорилось для случая фиг. 10.
Таким образом, введение в состав системы управления газодобывающей скважиной адаптивного регулятора позволило обеспечить высокую эффективность работы этой системы на всех режимах стабилизации давления в коллекторе скважины. Имеет место оптимизация адаптивной системы автоматического управления газодобывающей скважины с поддержанием требуемой высокой точности давления выходного газа в условиях изменяющегося расхода газа и изменяющихся параметров самой газодобывающей скважины и обеспечение высокого ресурса технических средств элементов автоматики.
Способ управления режимами работы газовой скважины с ограничением отбора газа, поступающего из межтрубного пространства, путем дросселирования с поддержанием постоянства перепада давления с помощью автоматического управляющего комплекса, в котором анализируют полученные данные и подают команды на автоматический регулирующий клапан расхода газа, оптимизируя суммарный дебит скважины в соответствии с определенной зависимостью с учетом фильтрационных сопротивлений скважины, отличающийся тем, что управление режимами работы газодобывающей скважины формируют на основе адаптивного импульсного регулятора, воздействующего на временной квантователь, в котором происходит фиксация величины управляющего сигнала u(t) в течение заданного периода (кванта) времени с последующим воздействием на исполнительный механизм, управляющим регулирующим клапаном, меняющим количество газа, поступающего в коллектор, следя за квантованным сигналом u, при этом адаптивный регулятор имеет закон регулирования где k, k - коэффициенты соответственно интегральной и пропорциональной составляющих ПИД закона регулирования, k(t) - общий коэффициент передачи, который изменяется в соответствии с уравнениями:k(t)=k+γy(t), где время фильтрации Т рассчитывается в условных единицах, а k>0 и γ>0 - настраиваемые параметры адаптивного регулятора.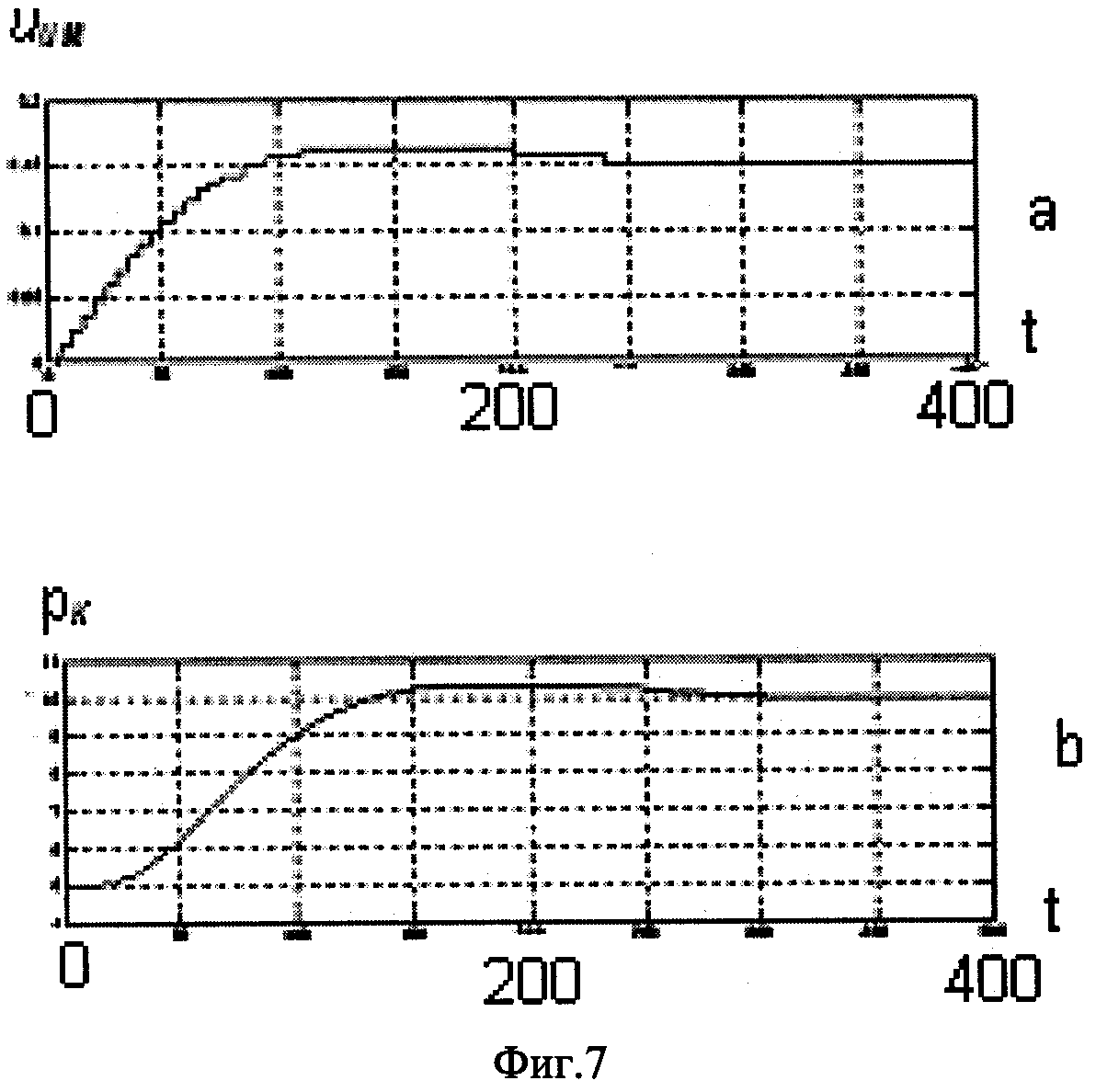


Многопозиционный пневматический модуль линейных перемещений
Измеритель путевой скорости и угла сноса летательного аппарата
Система управления движением судна с дублированием каналов курса и резервным управлением по курсу
Способ определения влагосодержания диэлектрической жидкости
Способ измерения путевой скорости и угла сноса летательного аппарата
Радиоволновый способ измерения путевой скорости
Способ измерения давления
Устройство для ударного воздействия на призабойную зону
Способ ударного воздействия на призабойную зону
Устройство для идентификации уровней междисциплинарного синтеза исследований
Способ преобразования кинетической энергии ветра
Привязной аэростат
Устройство для внутрипластового горения

