Результат интеллектуальной деятельности: САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД
Вид РИД
Изобретение
Изобретение относится к области автоматического управления электроприводами при возникновении дефектов в их датчиках положения.
Известен самонастраивающийся электропривод, содержащий последовательно соединенные измеритель рассогласования, регулятор, усилитель, электродвигатель с редуктором, выходной вал которого соединен с датчиком скорости и датчиком положения, выход которого подключен к первому входу измерителя рассогласования, второй вход которого соединен с входом электропривода, последовательно соединенные первый релейный элемент, первый сумматор, второй вход которого соединен с выходом датчика скорости и входом первого релейного элемента, а его третий вход с выходом датчика тока якорной обмотки электродвигателя, первый интегратор, первый выпрямитель, блок деления, второй вход которого через второй выпрямитель подключен к выходу датчика скорости, элемент выборки-хранения, второй вход которого через второй релейный элемент соединен с выходом датчика скорости, а его выход с вторым входом регулятора, последовательно соединенные второй и третий сумматоры, второй интегратор, четвертый сумматор, второй вход которого подключен к выходу датчика тока, первый блок умножения, третий интегратор и второй блок умножения, второй вход которого подключен к второму входу регулятора, а его выход к третьему входу этого регулятора, последовательно соединенные третий блок умножения, первый вход которого соединен с выходом второго сумматора, а его второй вход с вторым входом первого блока умножения и через функциональный преобразователь с выходом второго интегратора, пятый сумматор, второй вход которого подключен к выходу источника постоянного напряжения, и четвертый блок умножения, второй вход которого соединен с выходом четвертого сумматора, а его выход с вторым входом третьего сумматора, третий вход которого подключен к выходу пятого блока умножения, соединенного первым входом с выходом второго интегратора, а вторым входом с выходом третьего интегратора, причем первый и второй входы второго сумматора подключены соответственно к выходам датчика скорости и усилителя (см. патент РФ № 2060530, МПК G05В13/02, 1996 г.).
Недостатком данного устройства является то, что оно позволяет улучшить точность и качество процесса управления, когда значительно изменяются инерционность объекта управления и активное сопротивление якорной обмотки электродвигателя, но при этом не обеспечивается аккомодация к дефектам в датчике положения привода.
Известен также самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, инерционное дифференцирующее звено, блок умножения, второй сумматор, второй вход которого через апериодическое звено подключен к выходу первого сумматора, усилитель, электродвигатель, редуктор, на выходном валу которого установлен датчик положения, выход которого подключен ко второму входу первого сумматора, первый вход которого соединен со входом электропривода, а также датчик скорости, установленный на выходном валу электродвигателя, последовательно соединенные датчик тока электродвигателя, третий сумматор и интегратор, а также блок деления, второй вход третьего сумматора через первый релейный элемент подключен к выходу датчика скорости, а также к входам первого выпрямителя и второго релейного элемента, первый вход блока деления через второй выпрямитель соединен с выходом интегратора, его второй вход подключен к выходу первого выпрямителя, а выход - к первому входу элемента выборки-хранения, второй вход которого соединен с выходом второго релейного элемента, а выход через функциональный преобразователь, реализующий кусочно-линейную аппроксимацию нелинейной функции, обратной частоте среза амплитудно-частотной характеристики электропривода и зависящей от изменяющегося суммарного приведенного момента инерции ротора электродвигателя и вращающихся частей редуктора с объектом управления - со вторым входом блока умножения (см. патент РФ № 2397529, МПК G05В13/00, 2010 г.).
Указанное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению. Но его недостатком является то, что оно, обеспечивая высокое качество управления при любом значении его суммарного момента инерции, не позволяет сохранить высокую динамическую точность при появлении ошибок в работе датчика положения выходного вала редуктора.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение неизменно точной работы электропривода при возникновении дефектов в датчике положения.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в обеспечении нечувствительности работы электропривода к появляющимся дефектам в датчике положения за счет формирования дополнительного управляющего воздействия, подаваемого на его вход. Это сохраняет работоспособность электропривода в процессе его эксплуатации.
Поставленная задача решается тем, что в самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, электродвигатель, связанный с датчиком скорости непосредственно и через редуктор - с датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с входом устройства, дополнительно вводятся последовательно соединенные второй сумматор, первый вход которого соединен с выходом датчика скорости, первый интегратор, третий сумматор, второй вход которого подключен к выходу датчика положения, а выход - ко второму входу второго сумматора и входу второго интегратора, выход которого соединен с третьим входом первого сумматора.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения обеспечивают инвариантность электропривода к ошибкам в работе его датчика положения, что обеспечивает неизменное качество в процессе его эксплуатации.
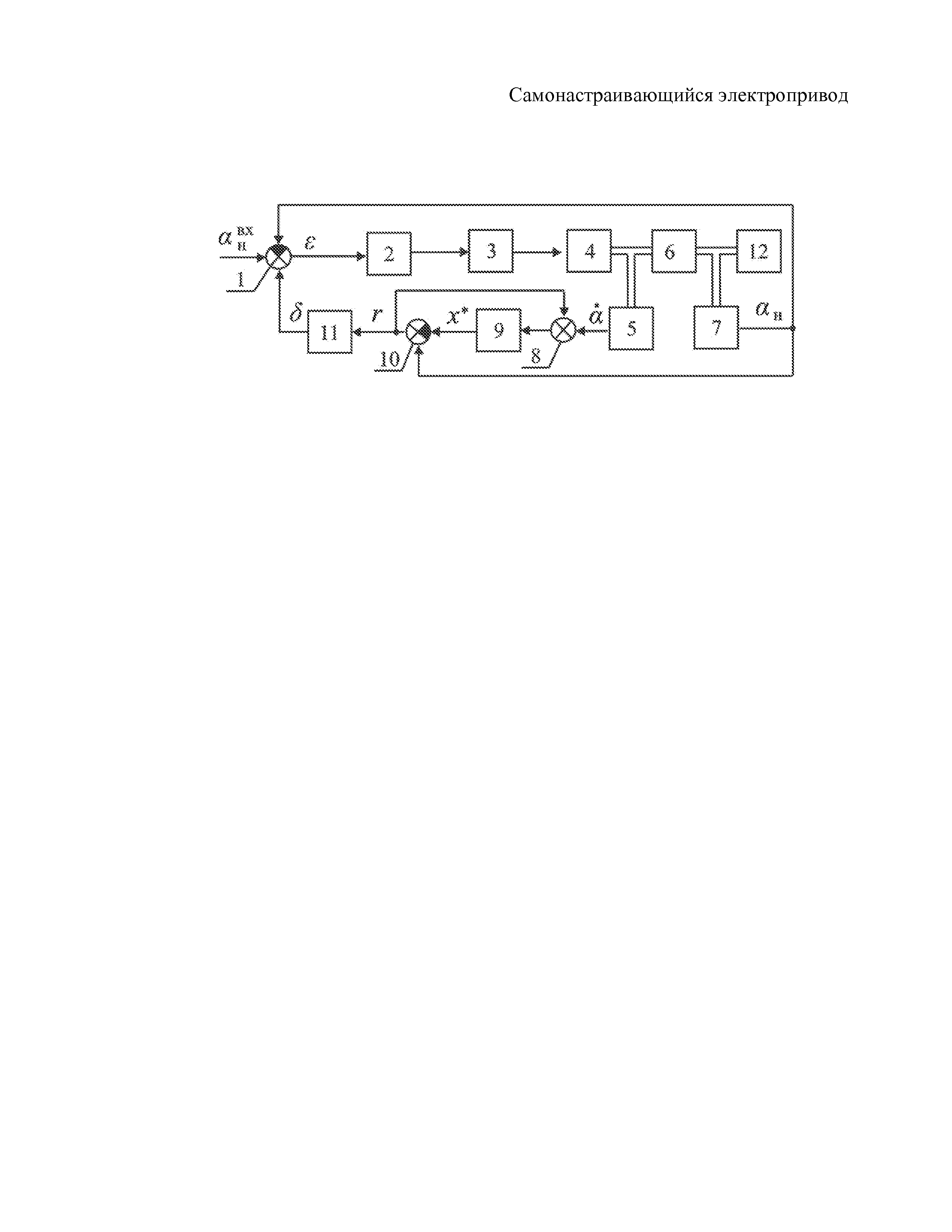
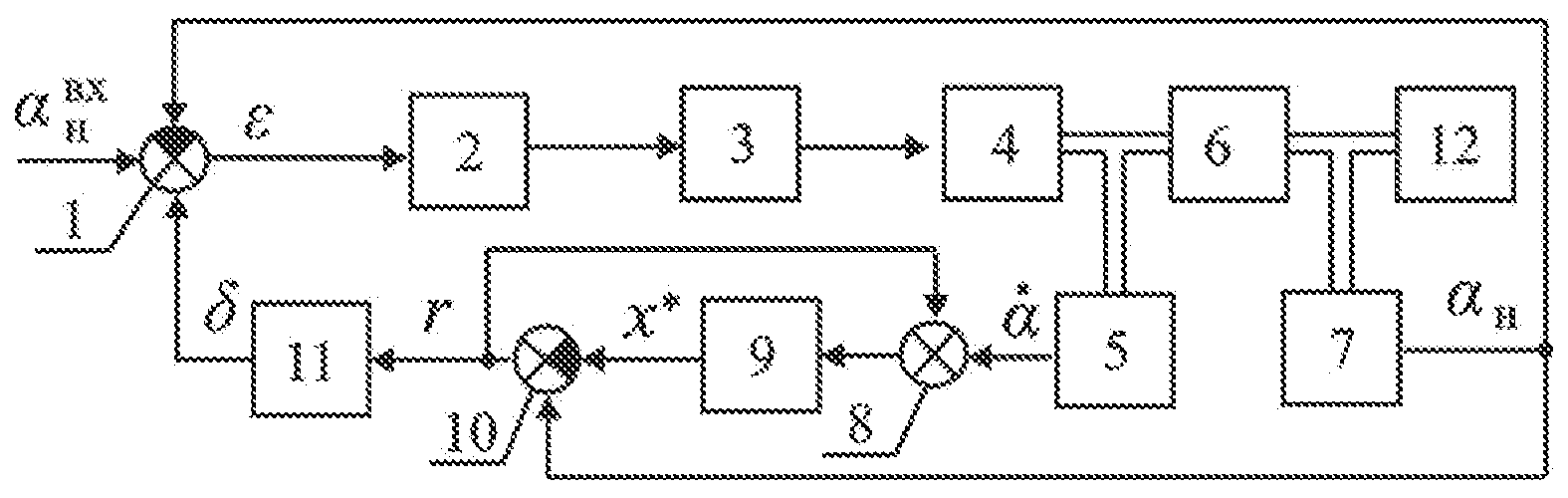
Изобретение поясняется чертежом, на котором представлена структурная схема самонастраивающегося электропривода и введены следующие обозначения:  - угол поворота выходного вала редуктора;
- угол поворота выходного вала редуктора;  - задающий (входной) сигнал,
- задающий (входной) сигнал,  - скорость вращения вала электродвигателя,
- скорость вращения вала электродвигателя,  - ошибка электропривода.
- ошибка электропривода.
Самонастраивающийся электропривод содержит последовательно соединенные первый сумматор 1, корректирующее устройство 2, усилитель 3, электродвигатель 4, связанный с датчиком скорости 5 непосредственно и через редуктор 6 - с датчиком положения 7, выход которого подключен к первому входу первого сумматора 1, второй вход которого соединен с входом устройства, последовательно соединенные второй сумматор 8, первый вход которого соединен с выходом датчика скорости 5, первый интегратор 9, третий сумматор 10, второй вход которого подключен к выходу датчика положения 7, а выход - ко второму входу второго сумматора 8 и входу второго интегратора 11, выход которого соединен с третьим входом первого сумматора 1, объект управления 12.
Электропривод работает следующим образом. На его вход подается управляющее воздействие  , обеспечивающее требуемый закон изменения угла
. На выходе первого сумматора 1, все положительные входы которого имеют единичные коэффициенты усиления, вырабатывается сигнал
, обеспечивающее требуемый закон изменения угла
. На выходе первого сумматора 1, все положительные входы которого имеют единичные коэффициенты усиления, вырабатывается сигнал  , который после коррекции в корректирующем устройстве 2, усиливаясь, поступает на электродвигатель 4, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящим от величины поступающего напряжения.
, который после коррекции в корректирующем устройстве 2, усиливаясь, поступает на электродвигатель 4, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящим от величины поступающего напряжения.
При возникновении дефекта в датчике положения 7 его выходной сигнал будет содержать ошибку  , снижающую точность работы электропривода в процессе выполнения им конкретных технологических операций.
, снижающую точность работы электропривода в процессе выполнения им конкретных технологических операций.
Первый положительный вход второго сумматора 8 (со стороны датчика скорости 5) имеет коэффициент усиления  (где
(где  - передаточное отношение редуктора 8), а его второй положительный вход - коэффициент усиления
- передаточное отношение редуктора 8), а его второй положительный вход - коэффициент усиления  . В результате на выходе этого сумматора формируется сигнал
. В результате на выходе этого сумматора формируется сигнал
 , (1)
, (1)
а на выходе первого интегратора 9, имеющего единичный коэффициент усиления, - сигнал  , который является некоторой оценкой выходного сигнала датчика положения 7, где
, который является некоторой оценкой выходного сигнала датчика положения 7, где
 (2)
(2)
- выходной сигнал третьего сумматора 10, имеющего первый отрицательный (со стороны первого интегратора 9) и второй положительный входы с единичными коэффициентами усиления.
Взяв производные от левой и правой частей выражения (2), с учетом выражения (1), а также того, что при отсутствии дефектов в датчике положения 7 имеет место выражение  , несложно получить:
, несложно получить:  если дефекты в датчике положения 7 отсутствуют. Если же они присутствуют, то имеет место выражение
если дефекты в датчике положения 7 отсутствуют. Если же они присутствуют, то имеет место выражение
 , (3)
, (3)
где  - величина, характеризующая ошибку измерения датчиком положения 7 угла
(она является производной от ошибки измерения
- величина, характеризующая ошибку измерения датчиком положения 7 угла
(она является производной от ошибки измерения  ).
).
Решение уравнения (3) имеет вид:  . Поскольку положительная величина ω может быть выбрана достаточно большой, то в быстро наступающем установившемся режиме работы системы (спустя малое время t) имеет место соотношение
. Поскольку положительная величина ω может быть выбрана достаточно большой, то в быстро наступающем установившемся режиме работы системы (спустя малое время t) имеет место соотношение  В результате на выходе второго интегратора 11, имеющего коэффициент усиления
В результате на выходе второго интегратора 11, имеющего коэффициент усиления  , формируется искомый сигнал ошибки измерения
, формируется искомый сигнал ошибки измерения  , который присутствует в показаниях датчика положения 7. В первом сумматоре 1 происходит вычитание найденного сигнала ошибки
из выходного сигнала датчика положения 7, в котором присутствует эта ошибка. В результате удается получить точное (искомое) значение угла поворота выходного вала электропривода
и тем самым сохранить высокую точность его работы.
, который присутствует в показаниях датчика положения 7. В первом сумматоре 1 происходит вычитание найденного сигнала ошибки
из выходного сигнала датчика положения 7, в котором присутствует эта ошибка. В результате удается получить точное (искомое) значение угла поворота выходного вала электропривода
и тем самым сохранить высокую точность его работы.
Система коррекции траектории движения манипулятора
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипуляционного робота
Способ управления манипулятором
Устройство для управления приводом робота
Система коррекции траектории движения манипулятора
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипулятора
Устройство для очистки корпусов судов

