Результат интеллектуальной деятельности: РАДИОЛОКАЦИОННАЯ СИСТЕМА
Вид РИД
Изобретение
Изобретение относится к области радиолокации, а именно к активным малогабаритным когерентным твердотельным цифровым радиолокационным системам без механических движущихся частей в своем составе, и может быть использовано в системах безопасности для обнаружения и измерения в режиме реального времени параметров траекторий движущихся объектов (люди, животные, транспортные средства и т.д.) при контроле больших по площади территорий, акваторий и воздушного пространства.
В настоящее время существуют твердотельные радиолокаторы на основе малоэлементных цифровых фазированных антенных решеток с использованием широкополосных когерентных последовательностей модулированных импульсов и моноимпульсными (квазимоноимпульсными) способами измерения угловых координат обнаруженных движущихся объектов.
Наиболее близким к заявленному изобретению является радиолокатор с малоэлементной цифровой фазированной антенной решеткой (патент RU 144519), в котором применяются: малоэлементная цифровая антенная решетка, квазимономоимпульсный способ измерения угловых координат и траекторные фильтры с большой эффективной памятью. Данный радиолокатор выбран в качестве прототипа заявленного изобретения.
Недостатками радиолокатора-прототипа являются меньшая дальность обнаружения, узкий сектор (не более 90 град.) наблюдения, обусловленный плоской формой приемопередающей антенны, и более низкая степень защищенности от внешних активных помех, обусловленная отсутствием возможности кодирования начальной фазы каждого зондирующего импульса по случайному закону (модуляция) с образованием уникального фазового ключа для когерентной последовательности импульсов, который используют для последующей согласованной фильтрации "своих" эхо-сигналов с компенсацией случайной фазы (демодуляция).
Задачей заявленного изобретения является создание цифровой радиолокационной системы с более широким сектором наблюдения (до 360 градусов) за счет наличия нескольких радиолокационных модулей с набором приемопередающих антенн, расположенных в разных плоскостях (конформная антенна); с повышенной степенью защищенности от внешних активных помех за счет того, что каждый из радиолокационных модулей системы выполнен с возможностью кодирования начальной фазы каждого зондирующего импульса по случайному закону (модуляция) с образованием уникального фазового ключа для когерентной последовательности импульсов, который используют для последующей согласованной фильтрации "своих" эхо-сигналов с компенсацией случайной фазы (демодуляция), при этом эхо-сигналы от соседних "чужих" радиолокационных систем, а также внешние гармонические (квазигармонические) активные помехи подвергаются разрушению в цифровом приемном тракте радиолокационного модуля в результате их модуляции по фазе; с увеличенной дальностью обнаружения за счет компенсации ослабления мощности эхо-сигналов в коммутаторе, входящем в состав радиолокационного модуля.
Поставленная задача решена путем создания радиолокационной системы, содержащей, по меньшей мере, два радиолокационных модуля 1, которые соединены с коммутационным модулем 2, который имеет единый информационный выход-выход, при этом приемные и передающие фазированные группы 5 и 7 элементарных излучателей разных радиолокационных модулей 1 расположены в разных плоскостях, причем радиолокационный модуль 1 содержит на антенной плате, по меньшей мере, одну передающую фазированную группу 4 и, по меньшей мере, две приемные фазированные группы 5, состоящие из элементарных излучателей 3, при этом выходы приемных фазированных групп 5 соединены через полосовые фильтры 8 приемного канала и малошумящие усилители 6 приемного канала с входом данных многоканального коммутатора 7, выход данных которого соединен с входом общего малошумящего усилителя 6, выход которого соединен с первым входом аналого-цифрового преобразователя 12, выход которого соединен с первым входом фазовращателя 15 приемного канала, выход которого соединен с первым входом вычислителя 16, причем первый управляющий выход вычислителя 16 соединен с управляющим входом коммутатора 7, второй управляющий выход вычислителя 16 соединен с входом управляемого генератора 14 случайной фазы, третий управляющий выход вычислителя 16 соединен с первым входом фазовращателя 13 передающего канала, второй вход вычислителя 16 соединен с первым выходом опорного генератора 11, первый вход-выход вычислителя 16 соединен с блоком 18 синхронизации радиолокационных модулей, который через шину синхронизации соединен с коммутационным модулем 2, а второй вход-выход вычислителя 16 через шину Ethernet соединен с контроллером 17 сети Ethernet, который через шину Ethernet соединен с коммутационным модулем 2, первый выход управляемого генератора 14 случайной фазы соединен с вторым входом фазовращателя 15 приемного канала, а второй выход управляемого генератора 14 случайной фазы соединен с вторым входом фазовращателя 13 передающего канала, выход которого соединен с первым входом синтезатора 10 зондирующего сигнала, второй вход которого соединен с вторым выходом опорного генератора 11, третий выход которого соединен с вторым входом аналого-цифрового преобразователя 12, а выход синтезатора 10 зондирующего сигнала соединен с входом полосового фильтра 8 передающего канала, выход которого соединен с входом усилителя мощности 9, выход которого соединен с входами элементарных 3 излучателей передающей фазированной группы 4, при этом:
- аналого-цифровой преобразователь 12 выполнен с возможностью дискретизации эхо-сигналов;
- синтезатор 10 зондирующего сигнала и опорный генератор 11 выполнены с возможностью синтеза зондирующих сигналов по командам вычислителя 16, при этом управляемый генератор 14 случайной фазы выполнен с возможностью задания начальной фазы зондирующего импульса через фазовращатель 13 передающего канала;
- передающая фазированная группа 4 выполнена с возможностью излучения в пространство зондирующего сигнала, прошедшего через усилитель мощности 9, при этом зондирующий сигнал выполнен в виде длинных когерентных последовательностей широкополосных зондирующих импульсов со случайной начальной фазой;
- выбранная с помощью управляемого коммутатора 7 приемная фазированная группа 5 выполнена с возможностью приема эхо-сигналов между интервалами излучения эхо-сигналов;
- в течение разделенных по времени циклов передачи и приема сигналов вычислитель 16 выполнен с возможностью осуществления многократного переключения приемных фазированных групп (последовательный сбор сигнальной информации с общей апертуры антенной системы) 5 на первый одноканальный вход вычислителя 16, а также с возможностью обработки эхо-сигналов, при этом демодуляции случайной фазы принимаемых импульсов с помощью фазовращателя 15 приемного канала согласно алгоритму управления, который определяется программой вычислителя 16;
- вычислитель 16 выполнен с возможностью измерения угловых координат обнаруженных объектов с применением квазимоноимпульсного фазового метода на одном приемном канале;
- вычислитель 16 выполнен с возможностью передачи выходной траекторной информации и входной управляющей информации из радиолокационного модуля через контроллер информационной сети;
- блок 18 синхронизации радиолокационных модулей выполнен с возможностью обеспечения работы каждого радиолокационного модуля в составе системы, состоящей, по меньшей мере, из двух радиолокационных модулей 1, соединенных между собой цифровыми шинами синхронизации через коммутационный модуль 2, при этом синхронизации радиолокационных модулей 1 для образования единой радиолокационной системы с помощью цифровых шин синхронизации, причем один из радиолокационных модулей 1 приобретает статус ведущего с правом распределения временных окон для работы остальных ведомых радиолокационных модулей 1;
- коммутационный модуль 2 выполнен с возможностью раздачи сигналов синхронизации для радиолокационных модулей 1, а также с возможностью выполнения функции сетевого устройства типа "свитч" для включения радиолокационных модулей 1 в единую информационную сеть.
В предпочтительном варианте осуществления радиолокационной системы коммутационный модуль 2 имеет единый информационный выход по интерфейсу Ethernet.
В предпочтительном варианте осуществления радиолокационной системы элементарные излучатели 3 выполнены с возможностью передачи и приема радиосигналов, пространственно разнесены, имеют широкую диаграмму направленности и выполнены на плоских печатных платах.
В предпочтительном варианте осуществления радиолокационной системы вычислитель 16 выполнен в виде высокопроизводительного параллельного цифрового вычислителя на ПЛИС (программируемой логической интегральной схеме) с большим объемом внутрикристальной памяти.
В предпочтительном варианте осуществления радиолокационной системы вычислитель 16 выполнен с возможностью цифровой обработки эхо-сигналов, при этом согласованной фильтрации объектов, обнаружения объектов, измерения координат объектов и траекторной фильтрации объектов.
В предпочтительном варианте осуществления радиолокационной системы фазовращатели 13, 14 и коммутатор 7 выполнены цифровыми.
В предпочтительном варианте осуществления радиолокационной системы информационной сетью является сеть Ethernet.
Для лучшего понимания заявляемого изобретения далее приводится его подробное описание с соответствующими графическими материалами.
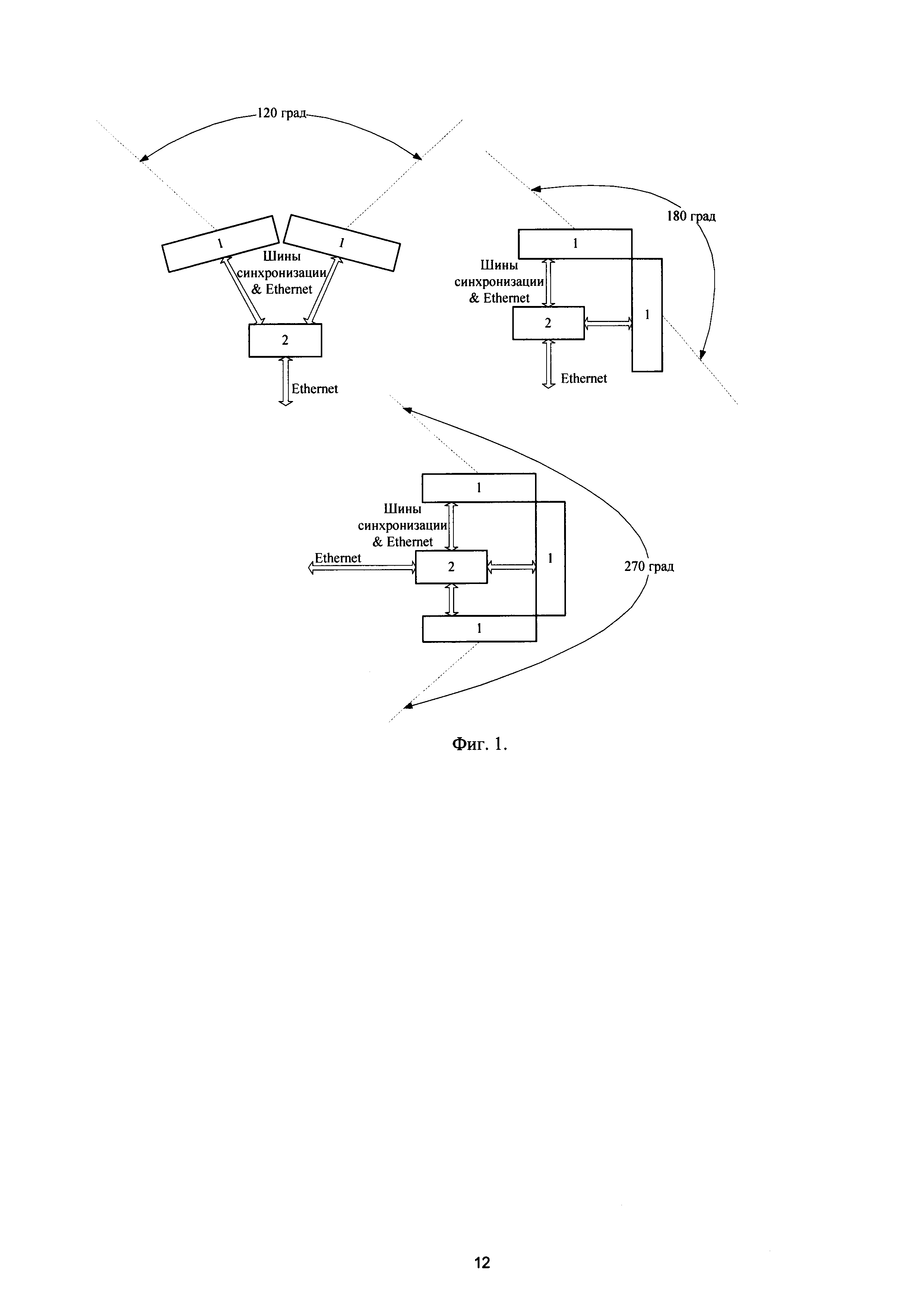
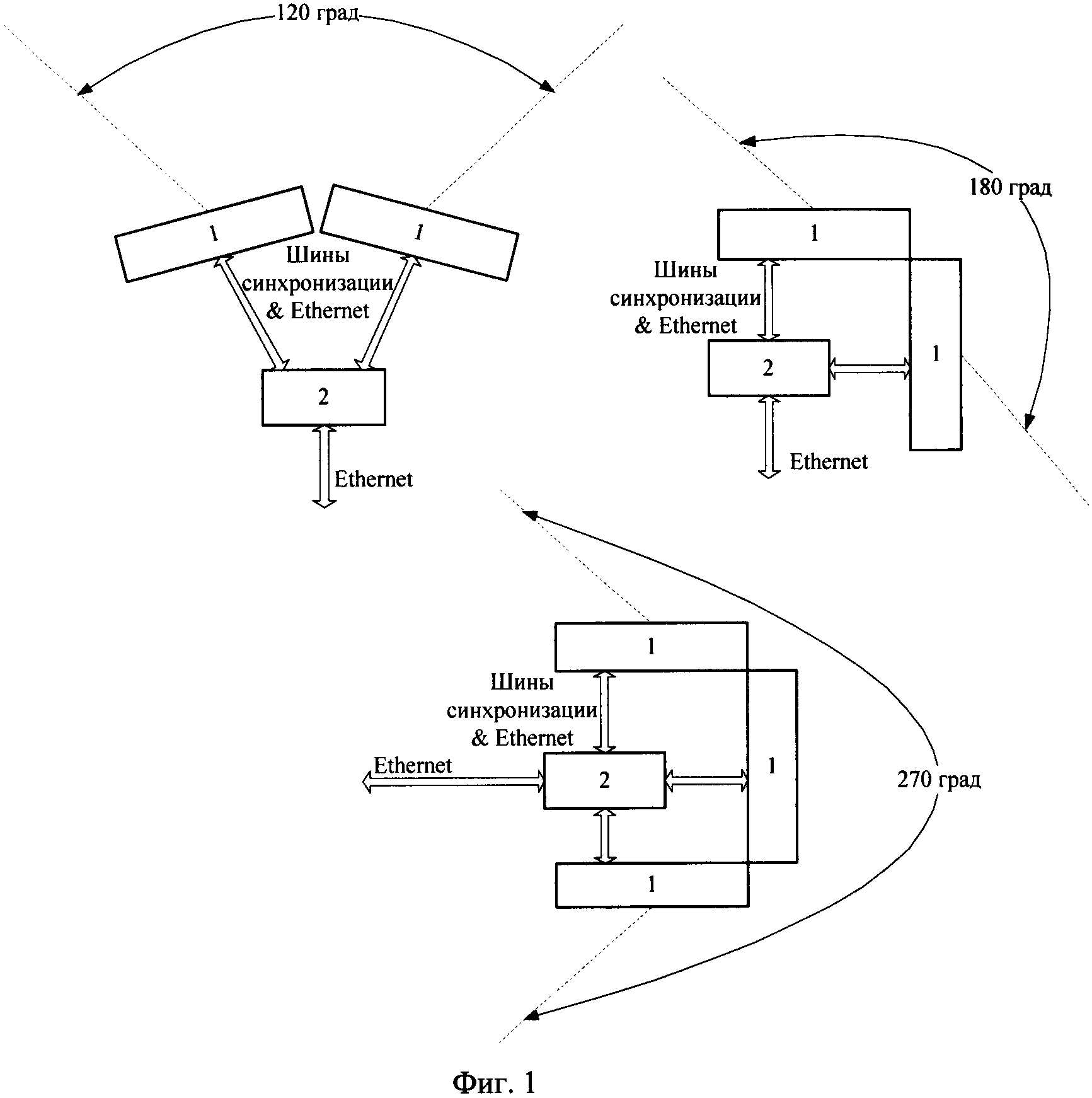
Фиг. 1. Структурные схемы радиолокационных систем, содержащих два и три радиолокационных модуля, имеющих сектора наблюдения 120, 180 и 270 градусов, выполненные согласно изобретению.
Элементы:
1 - радиолокационный модуль;
2 - коммутационный модуль.
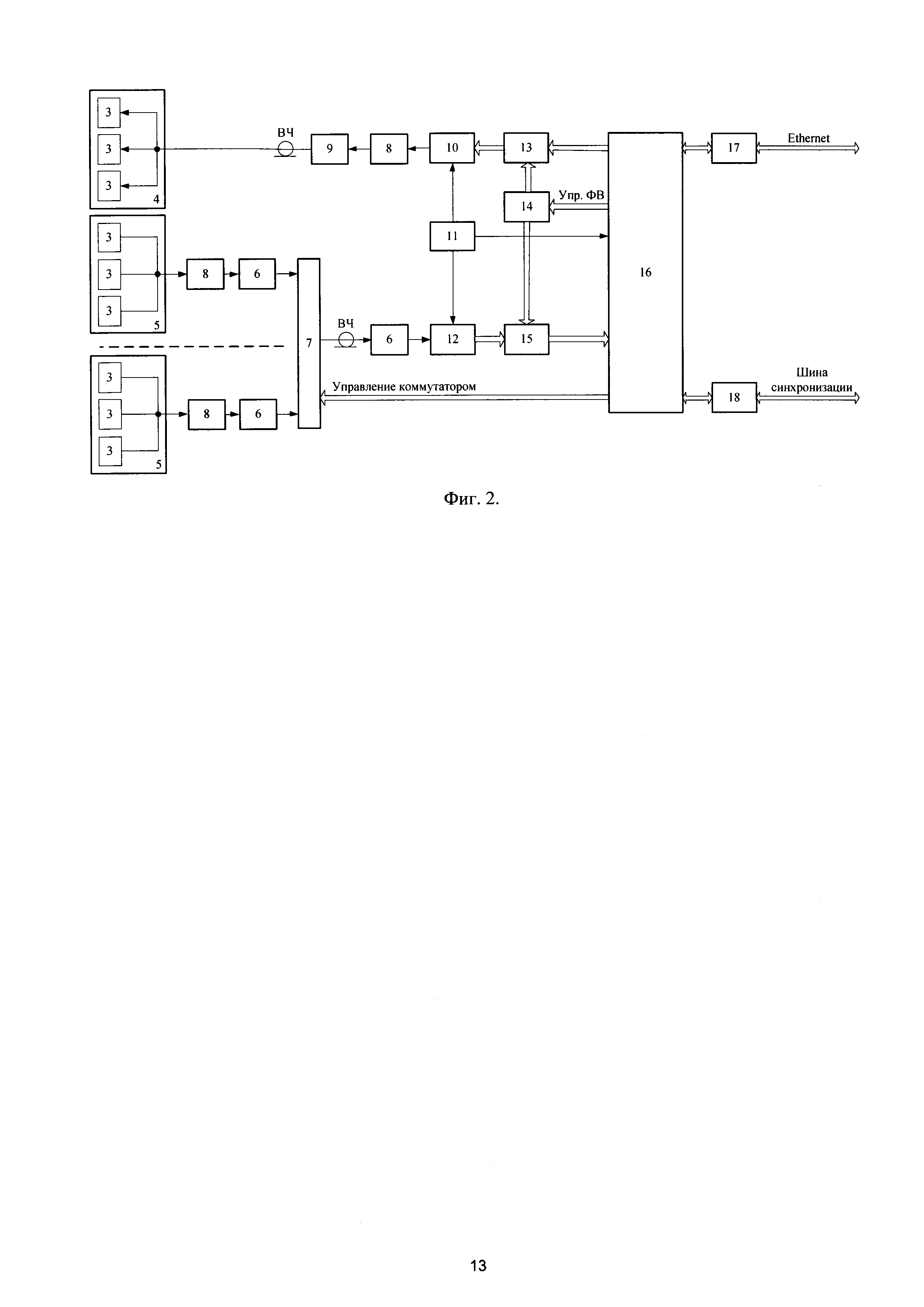
Фиг. 2. Функциональная схема радиолокационного модуля, выполненная согласно изобретению.
Элементы:
3 - элементарный излучатель;
4 - передающая фазированная группа;
5 - приемная фазированная группа;
6 - малошумящий усилитель;
7 - коммутатор;
8 - полосовой фильтр;
9 - усилитель мощности;
10 - синтезатор зондирующего сигнала;
11 - опорный генератор;
12 - аналого-цифровой преобразователь (АЦП);
13 - фазовращатель передающего канала;
14 - управляемый генератор случайной фазы;
15 - фазовращатель приемного канала;
16 - параллельный вычислитель на ПЛИС;
17 - контроллер сети Ethernet;
18 - блок синхронизации радиолокационных модулей.
Рассмотрим основные принципы функционирования заявленной радиолокационной системы (Фиг. 1). Радиолокационная система состоит из нескольких синхронизированных радиолокационных модулей 1, каждый из которых обслуживает свой сектор наблюдения (до 60…90 град.). Синхронизация радиолокационных модулей 1 обеспечивает временную развязку между циклами излучения-приема отдельных радиолокационных модулей 1, при этом происходит автоматическое выделение свободных "временных окон" для каждого из радиолокационных модулей 1 системы, работающих при этом на одной несущей частоте, и таким образом, вся система представляет собой единый радиолокатор с набором приемопередающих антенн, расположенных в разных плоскостях (конформная антенна).
В дополнение к этому, каждый из радиолокационных модулей 1 заявленной радиолокационной системы производит кодирование начальной фазы каждого зондирующего импульса по "случайному закону" (модуляция) с образованием уникального фазового ключа для когерентной последовательности импульсов, который используют для последующей согласованной фильтрации "своих" эхо-сигналов с компенсацией случайной фазы (демодуляция), при этом эхо-сигналы от соседних "чужих" радиолокационных систем, а также внешние гармонические (квазигармонические) активные помехи подвергаются разрушению в цифровом приемном тракте радиолокационного модуля в результате их модуляции по фазе.
Рассмотрим более подробно вариант выполнения заявленной радиолокационной системы (Фиг. 1, 2). Антенна радиолокационного модуля (Фиг. 2) состоит из небольшого числа одинаковых пространственно разнесенных элементарных излучателей 3 с широкой (до 60÷90 град.) диаграммой направленности. Эти излучатели типа «патч» выполнены на основе плоских печатных плат с разделением излучателей на передающие и приемные. Излучатели объединены в группы, внутри которых излучатели фазированы на антенной печатной плате, образуя передающие и приемные фазированные группы 4 и 5. Каждая из приемных фазированных групп 5 подключена к входу цифрового многоканального управляемого коммутатора 7 через полосовые фильтры 8 приемного канала и малошумящие усилители 6 приемного канала. Применение подобной активной на прием антенны позволяет увеличить дальность обнаружения заявленной радиолокационной системы за счет компенсации ослабления мощности эхо-сигналов в коммутаторе 7. Далее сигнал без преобразования несущей частоты с выхода общего малошумящего усилителя 6 подвергается дискретизации в аналого-цифровом преобразователе (АЦП) 12 и через фазовращатель 15 приемного канала поступает на вход цифрового вычислителя 16.
С помощью цифрового вычислителя 16 выполняют цифровую обработку эхо-сигналов (согласованная фильтрация, обнаружение, измерение координат и траекторная фильтрация). Цифровой вычислитель 16 реализован в виде высокопроизводительного параллельного вычислителя на ПЛИС (программируемой логической интегральной схеме) с большим объемом внутрикристальной памяти.
Синтез зондирующих сигналов выполняют по командам цифрового вычислителя 16 с помощью цифрового синтезатора 10 зондирующего сигнала и опорного генератора 11. Начальную фазу зондирующего импульса задают с помощью управляемого генератора 14 случайной фазы через фазовращатель 13 передающего канала. Далее зондирующий сигнал через твердотельный усилитель мощности 9 излучают в пространство с помощью передающей фазированной группы 4.
Таким образом, с помощью радиолокационного модуля 1 излучают длинные когерентные последовательности широкополосных зондирующих импульсов со случайной начальной фазой, при этом между интервалами излучения производят прием эхо-сигналов на выбранную с помощью управляемого коммутатора приемную фазированную группу 5. В течение разделенных по времени циклов передачи и приема выполняют многократное переключение приемных фазированных групп (последовательный сбор сигнальной информации с общей апертуры антенной системы) 5 на одноканальный вход цифрового вычислителя 14 и обработку эхо-сигналов с демодуляцией случайной фазы принимаемых импульсов с помощью цифрового фазовращателя 15 приемного канала, согласно алгоритму управления определяемого программой цифрового вычислителя 16. Для измерения угловых координат обнаруженных объектов применяют квазимоноимпульсный фазовый метод на одном приемном канале. Выходную траекторную информацию и входную управляющую информацию радиолокатора передают через контроллер 17 сети Ethernet. Блок 18 синхронизации радиолокационных модулей обеспечивает работу каждого радиолокационного модуля 1 в составе радиолокационной системы.
Синхронизацию радиолокационных модулей 1 для образования единой радиолокационной системы (Фиг. 1) выполняют с помощью специализированных цифровых шин синхронизации. При этом один из радиолокационных модулей 1 приобретает статус ведущего с правом распределения временных окон для работы остальных ведомых радиолокационных модулей 1 радиолокационной системы. Всего в заявленной радиолокационной системе могут работать до 6-ти радиолокационных модулей 1, реализуя полный сектор наблюдения радиолокационной системы (до 360 градусов). Коммутационный модуль 2 обеспечивает раздачу сигналов синхронизации и выполняет функцию сетевого устройства (типа "свитч") для включения радиолокационных модулей 1 в единую информационную сеть Ethernet.
В заявленной радиолокационной системе:
- в радиолокационном модуле 1, в антенне, между каждой приемной фазированной группой 5 и входом коммутатора 7 установлен малошумящий усилитель 6 для компенсации ослабления мощности эхо-сигналов в коммутаторе 7, образуя активную антенну на прием;
- в радиолокационном модуле 1 происходит прямой цифровой синтез зондирующего сигнала и дискретизация эхо-сигналов на несущей частоте без использования аналоговых конверторов для преобразования частоты;
- в радиолокационном модуле 1 используют цифровые фазовращатели 13 и 15 для модуляции в передающем канале зондирующих импульсов и демодуляции в приемном канале эхоимпульсов по случайному закону;
- в радиолокационном модуле 1 вместо микропроцессорного ядра и внешней динамической памяти используют высокопроизводительный параллельный вычислитель на ПЛИС с внутрикристальной памятью и внешний контроллер сети Ethernet.
- в радиолокационном модуле 1 используют блок синхронизации, позволяющий включать радиолокационный модуль 1 в состав радиолокационной системы с широким (до 360 град.) сектором наблюдения.
В заявленной радиолокационной системе используют коммутационный модуль 2, позволяющий включать в состав системы до шести радиолокационных модулей 1 с единым информационным выходом по интерфейсу Ethernet, в зависимости от необходимого сектора наблюдения, и коммутационного модуля 2. Выходную радиолокационную (траекторную) информацию передают внешним потребителям через интерфейс Ethernet.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.
Способ и система коррекции дефектных пикселей изображения
Способ и система обработки изображения
Система и способ определения государственного регистрационного номера транспортного средства
Опорно-поворотное устройство
Способ и устройство обработки изображения
Устройство и способ приведения к единому формату различных цифровых видеосигналов
Система и способ автоматической фиксации несанкционированного прохода через зону контроля
Опорно-поворотное устройство
Система и способ обнаружения винтокрылых беспилотных летательных аппаратов
Параллельный реконфигурируемый кодер бчх кодов
Способ и система коррекции дефектных пикселей изображения
Способ и система обработки изображения
Система и способ определения государственного регистрационного номера транспортного средства
Опорно-поворотное устройство
Способ и устройство обработки изображения
Устройство и способ приведения к единому формату различных цифровых видеосигналов
Система и способ автоматической фиксации несанкционированного прохода через зону контроля
Опорно-поворотное устройство
Система и способ обнаружения винтокрылых беспилотных летательных аппаратов
Параллельный реконфигурируемый кодер бчх кодов

