Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ УСТРОЙСТВОМ СЕНСОРНОГО ВВОДА И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ СЕНСОРНОГО ВВОДА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу управления устройством сенсорного ввода.
Уровень техники
Устройство интерфейса, такое как сенсорная панель или сенсорная площадка, используя которое человек может непосредственно прикасаться к экрану отображения пальцем для ввода данных, широко используется в персональных компьютерах, различных портативных устройствах и портативных телефонах, и т.д. В последнее время также появились устройства, которые могут получать, в дополнение к координатам точки прикосновения, информацию атрибута, относящуюся к точке прикосновения, такую как сила (степень нажима) при прикосновении или направление пальца.
В патентной литературе 1 раскрыто портативное устройство отображения изображения, которое включает в себя экран отображения как на передней, так и на задней его сторонах.
Список литературы
Патентная литература
PTL1-JP 2010-26064 А.
Раскрытие изобретения
Техническая задача
В последние годы, в основном, используется многоточечная панель такого типа, которая называется панелью проекционного типа (проецируемого типа), в которой точки обнаружения располагаются в структуре решетки X-Y для выполнения развертки с разделением по времени, для обнаружения состояния многоточечного прикосновения. Когда выполняют многоточечный ввод данных, состоящий в прикосновении к множеству мест положений на сенсорной панели или сенсорной площадке такого проекционного типа, как описано выше, трудно обнаруживать положение и степень нажатия во множестве точек прикосновения с высокой степенью точности. Кроме того, возникает проблема "ложного прикосновения", состоящая в том, что, когда прикасаются к множеству местоположений одновременно, в зависимости от электрического состояния, обнаруживают напряжение из места положения, к котором фактически отсутствует прикосновение, и в результате может казаться, что присутствует фиксированное давление, когда местоположение, в котором фактически отсутствует прикосновение, выглядит, как местоположение прикосновения.
Настоящее изобретение было выполнено с учетом такой проблемы, как описано выше, и цель настоящего изобретения состоит в том, чтобы обеспечить технологию, с помощью которой можно обнаруживать многоточечный ввод данных с высокой степенью точности.
Решение задачи
Для решения описанной выше задачи, устройство управления устройством сенсорного ввода, в соответствии с аспектом изобретения, включает в себя: устройство сенсорного ввода, включающее в себя множество линий проводников, расположенных в каждом из первого направления и второго направления, и чувствительный к давлению резистивный элемент, предусмотренный в местоположении, в котором две из линий проводника пересекаются друг с другом; модуль привода, выполненный с возможностью последовательного выбора одной линии привода из множества линий привода, предусмотренных, как линии проводника, расположенные в первом направлении, и приложения напряжения привода к выбранной линии привода; модуль обнаружения напряжения, выполненный с возможностью последовательного выбора одной чувствительной линии из множества чувствительных линий, предусмотренных, как линии проводника, расположенных во втором направлении, и обнаружения выходного напряжения выбранной чувствительной линии; и модуль арифметической операции, выполненный с возможностью определять значение сопротивления чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором выбранная линия привода и выбранная чувствительная линия пересекают друг друга, на основе напряжения привода и выходного напряжения. Модуль привода прикладывает 0 вольт или напряжение смещения, равное или меньше, чем напряжение привода, к другим линиям привода, кроме выбранной линии привода.
Также другой аспект настоящего изобретения направлен на устройство управления устройством сенсорного ввода. Устройство включает в себя: устройство сенсорного ввода, включающее в себя множество линий проводника, расположенных в каждом из первого направления и второго направления, и чувствительный к давлению резистивный элемент, предусмотренный в местоположении, в котором две из линий проводника пересекают друг друга; модуль привода, выполненный с возможностью последовательного выбора одной линии привода из множества линий привода, предусмотренных, как линии проводника, расположенные в первом направлении, и приложения напряжения привода к выбранной линии привода; модуль обнаружения напряжения, выполненный с возможностью последовательного выбора одной чувствительной линии из множества чувствительных линий, предусмотренных, как линии проводника, расположенные во втором направлении, и обнаружения выходного напряжения выбранной чувствительной пинии; и модуль арифметической операции, выполненный с возможностью определения значения сопротивления чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором выбранная линия привода и выбранная чувствительная линия пересекают друг друга, на основе напряжения привода и выходного напряжения. Операцию развертки, которая включает в себя подачу напряжения привода к линии привода с помощью модуля привода и обнаружения выходного напряжения из чувствительной линии с помощью модуля обнаружения напряжения, выполняют за два этапа так, что электрическое состояние, подлежащее приложению к другим линиям привода, кроме линии привода, выбранной модулем привода, отличается между операцией развертки на первом этапе и операцией развертки на втором этапе. Модуль арифметической операции выполняет арифметическое управление в отношении первого выходного напряжения, обнаруживаемого модулем обнаружения напряжения при операции развертки на первом этапе, и вторым выходным напряжением, обнаруживаемым модулем обнаружения напряжения при операции развертки на втором этапе для определения конечного выходного напряжения, и определяет значение сопротивления чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором выбранная линия привода и выбранная чувствительная линия пересекаются друг с другом, на основе напряжения привода и конечного выходного напряжения.
Дополнительный аспект настоящего изобретения обеспечивает способ управления устройством сенсорного ввода. Способ включает в себя: этап привода, состоящий в последовательном выборе, из устройства сенсорного ввода, включающего в себя множество линий проводника, расположенных в каждом из первого направления и второго направления, и чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором две из линий проводника пересекаются друг с другом, одной линии привода из множества линий привода, предусмотренных, как линии проводника, расположенные в первом направлении, и приложения напряжения привода к выбранной линии привода; этап обнаружения напряжения, состоящий в последовательном выборе одной чувствительной линии из множества чувствительных линий, предусмотренных, в качестве линий проводника, расположенных во втором направлении, и обнаружения выходного напряжения в выбранной чувствительной линии; и этап арифметической операции, состоящий в определении значения сопротивления чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором выбранная линия привода и выбранная чувствительная линия пересекаются друг с другом, на основе напряжения привода и выходного напряжения. На этапе привода прикладывают 0 вольт или напряжение смещения, равное или меньшее, чем напряжение привода, к другим линиям привода, кроме выбранной линии привода.
Также, в еще одном дополнительном аспекте настоящего изобретения, обеспечивается способ управления устройством сенсорного ввода. Способ включает в себя: этап привода, состоящий в последовательном выборе из устройства сенсорного ввода, включающего в себя множество линий проводника, расположенных в каждом из первого направления и второго направления, и чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором две из линий проводника пересекаются друг с другом, одной линии привода из множества линий привода, предусмотренных, в качестве линий проводника, расположенных в первом направлении, и приложения напряжения привода к выбранной линии привода; этап обнаружения напряжения, состоящий в последовательном выборе одной чувствительной линии из множества чувствительных линий, предусмотренных, в качестве линий проводника, расположенных во втором направлении, и обнаружения выходного напряжения выбранной чувствительной линии; и этап арифметической операции, состоящий в определении значения сопротивления чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором выбранная линия привода и выбранная чувствительная линия пересекаются друг с другом, на основе напряжения привода и выходного напряжения. Операцию развертки, которая включает в себя подачу напряжения привода к линии привода на этапе привода, и обнаружение выходного напряжения из чувствительной линии на этапе обнаружения напряжения, выполняют в два этапа таким образом, что электрическое состояние, которое должно быть приложено к другим линиям привода, кроме линии привода, выбранной на этапе привода, отличается между операцией развертки на первом этапе и операцией развертки на втором этапе. Этап арифметической операции выполняет арифметические операции в отношении первого выходного напряжения, обнаруживаемого на этапе обнаружения напряжения, при операции развертки на первом этапе, и второго выходного напряжения, обнаруживаемого на этапе обнаружения напряжения во время операции развертки на втором этапе для определения конечного выходного напряжения, и определяет значение сопротивления чувствительного к давлению резистивного элемента, предусмотренного в местоположении, в котором выбранная линия привода и выбранная чувствительная линия пересекают друг друга на основе управляющего напряжения и конечного выходного напряжения.
Следует также отметить, что произвольная комбинация компонентов, описанных выше и представление настоящего изобретения, где его преобразуют между способом, устройствами, системой, компьютерной программой, структурой данных, носителем записи и т.д., являются эффективными, как режимы выполнения настоящего изобретения.
Предпочтительный эффект изобретения
В настоящем изобретении многоточечный ввод может быть обнаружен с высокой степенью точности.
Краткое описание чертежей
На фиг. 1 показана блок-схема устройства обработки сенсорного ввода в соответствии с вариантом осуществления.
На фиг. 2 показана функциональная блок-схема контроллера устройства сенсорного ввода по фиг. 1.
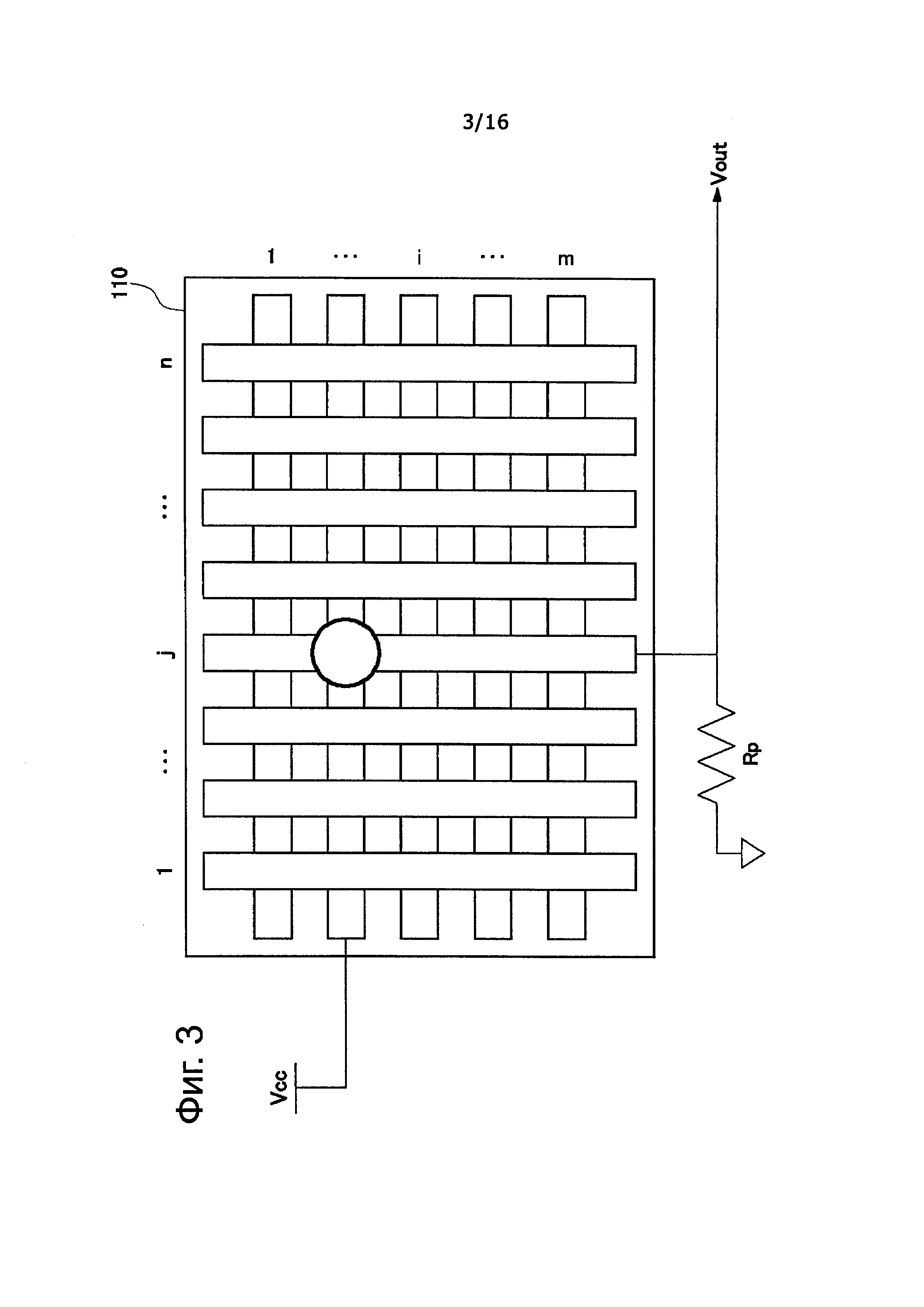
На фиг. 3 показан вид, иллюстрирующий внутреннюю структуру устройства сенсорного ввода по фиг. 1.
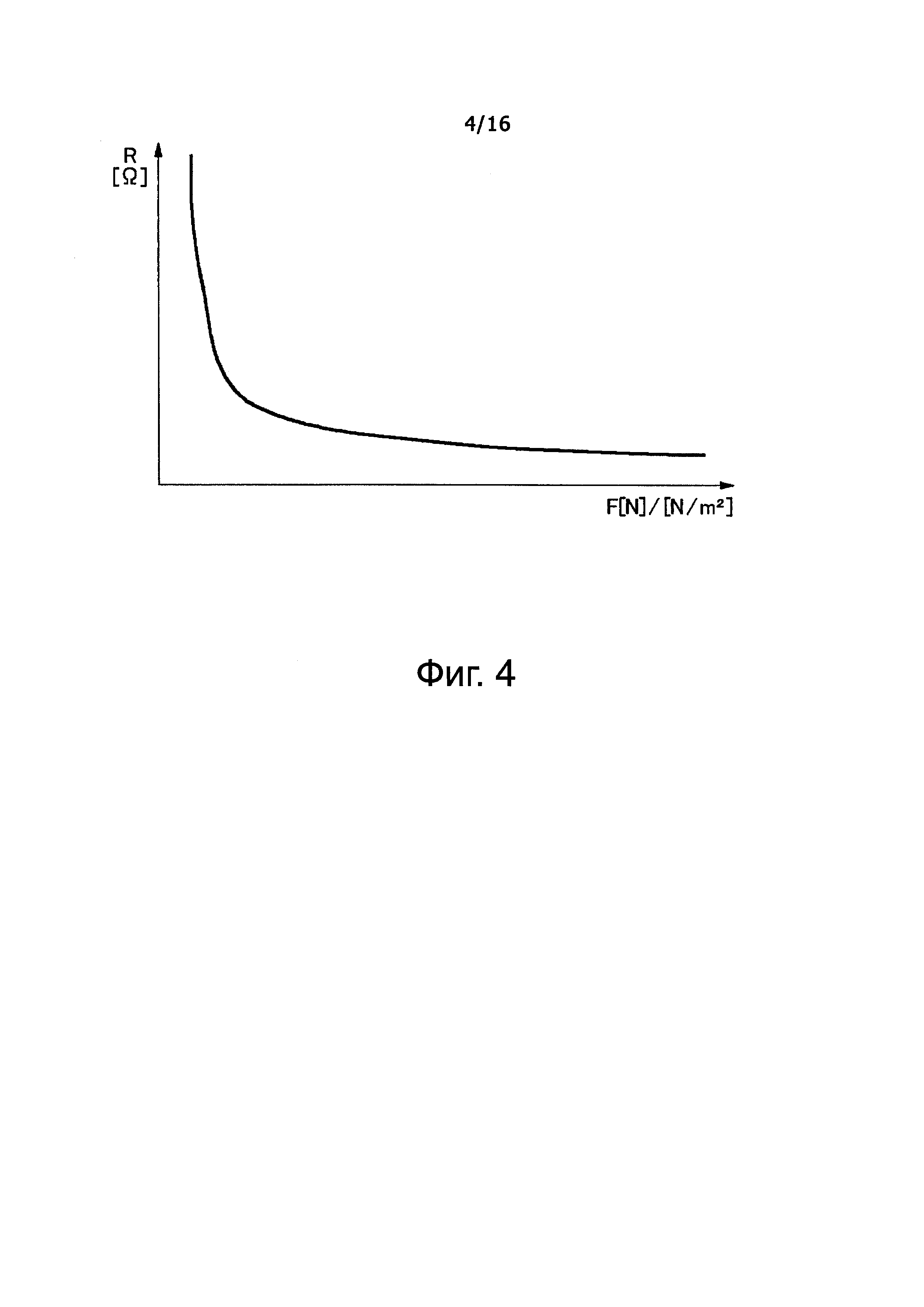
На фиг. 4 показан график, иллюстрирующий взаимосвязь между давлением, приложенным к чувствительному к давлению резистивному элементу, и значением сопротивления чувствительного к напряжению резистивного элемента.
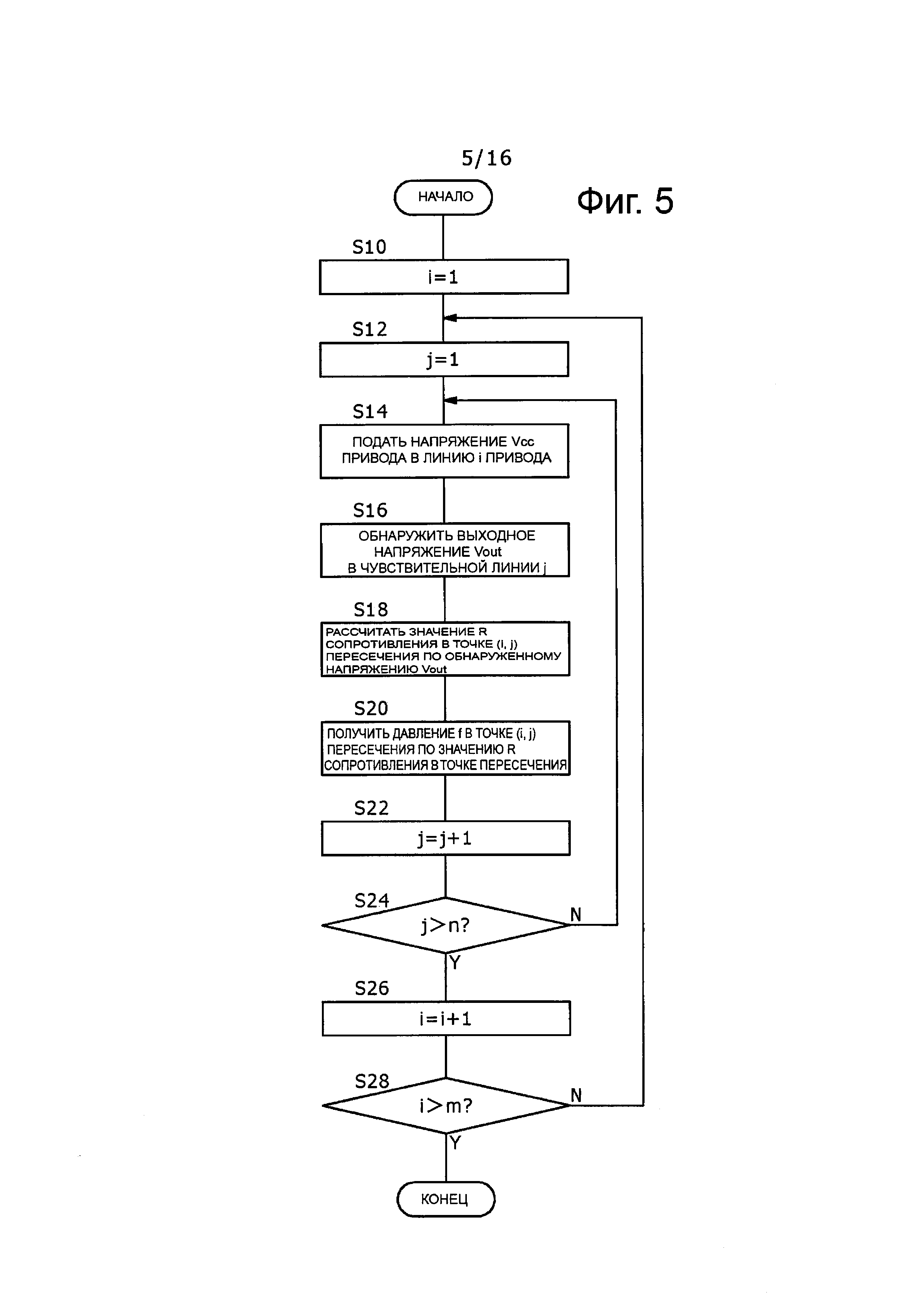
На фиг. 5 показана блок-схема последовательности операций, иллюстрирующая процедуру определения чувствительной к давлению многоточечной сенсорной панели.
На фиг. 6А показан вид, иллюстрирующий ложное прикосновение, которое возникает при многоточечном сенсорном вводе.
На фиг. 6В показан вид, иллюстрирующий ложное прикосновение, которое появляется при многоточечном сенсорном вводе.
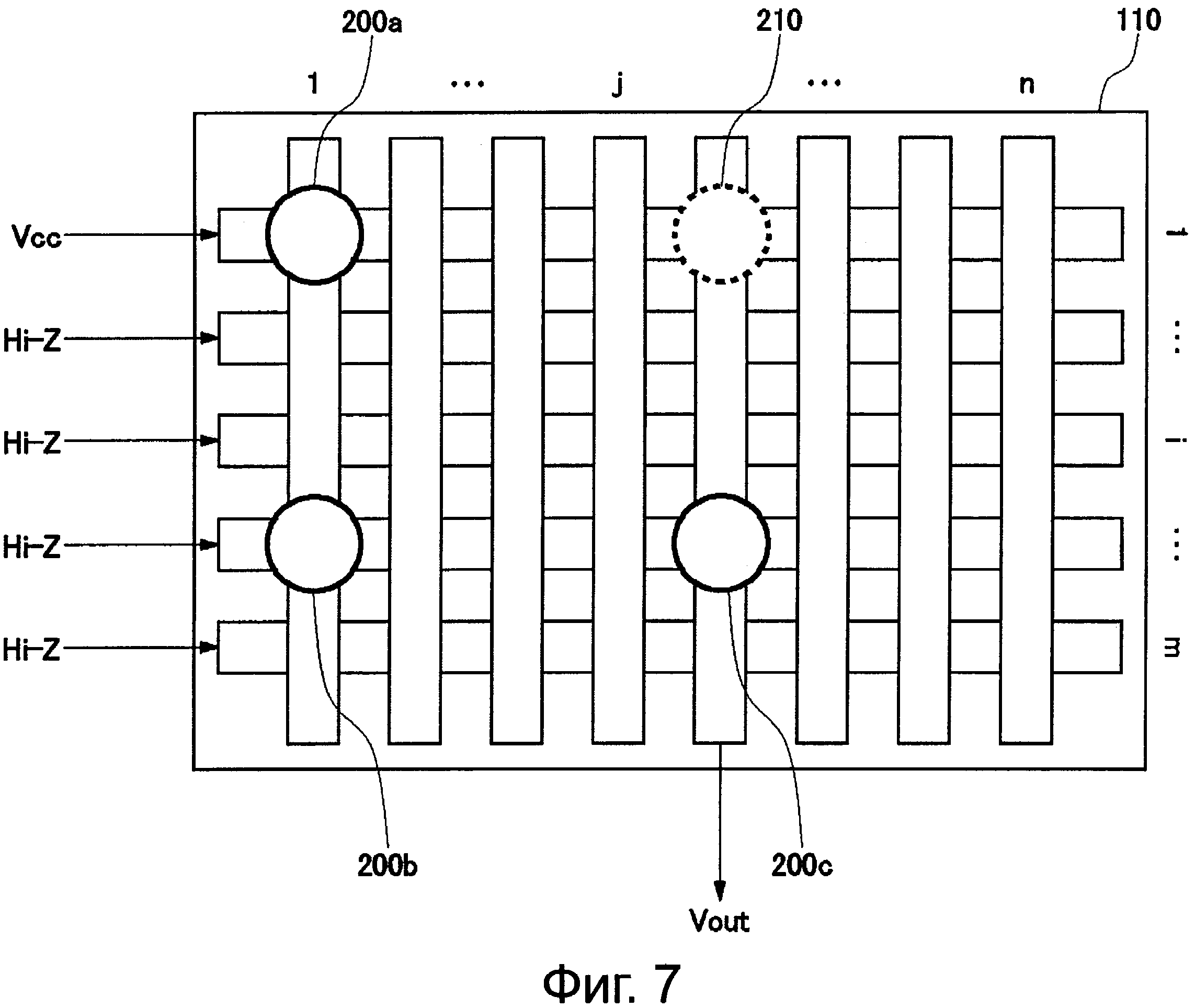
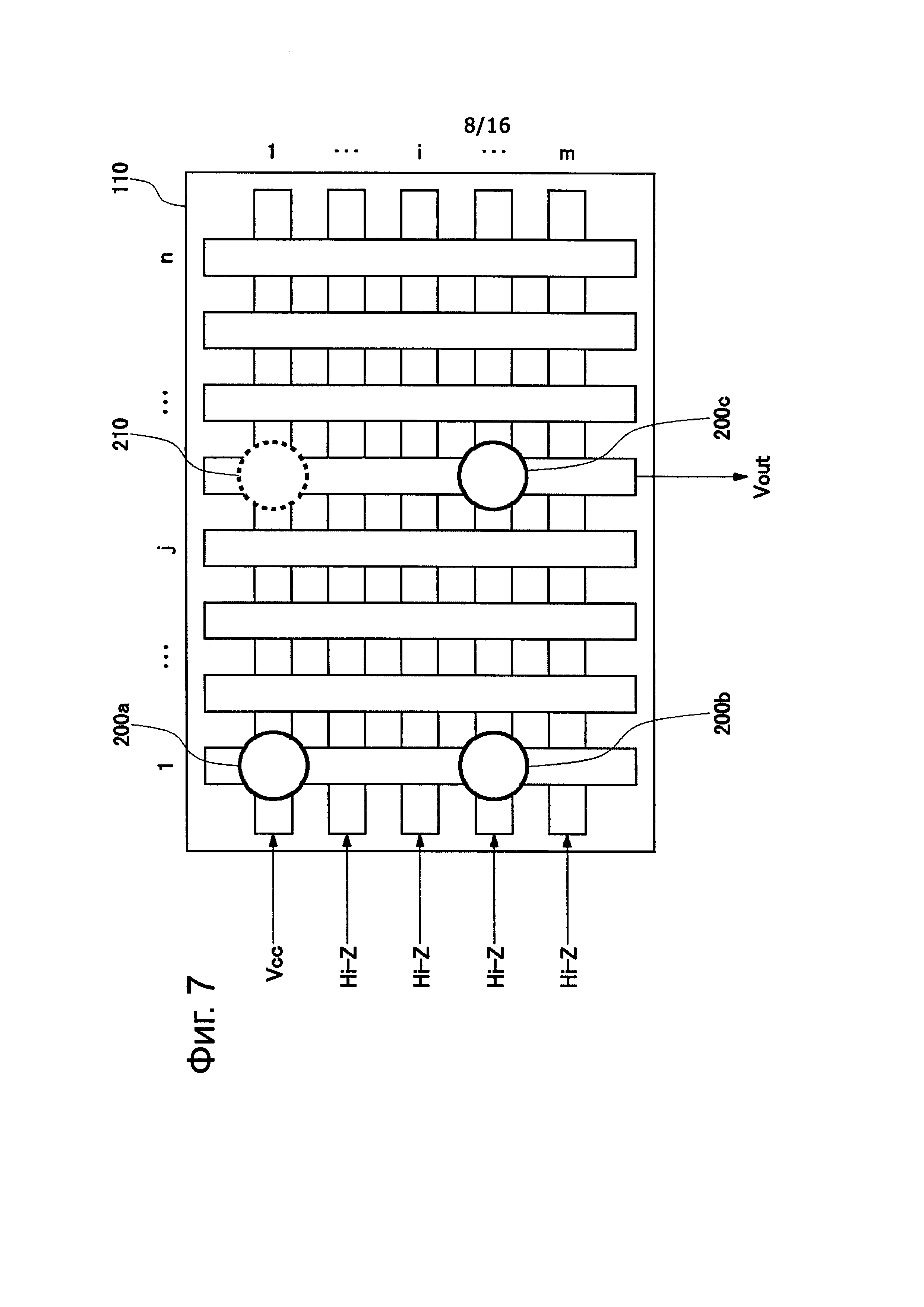
На фиг. 7 показан вид, иллюстрирующий способ развертки обычной чувствительной к давлению многоточечной панели сенсорного ввода.
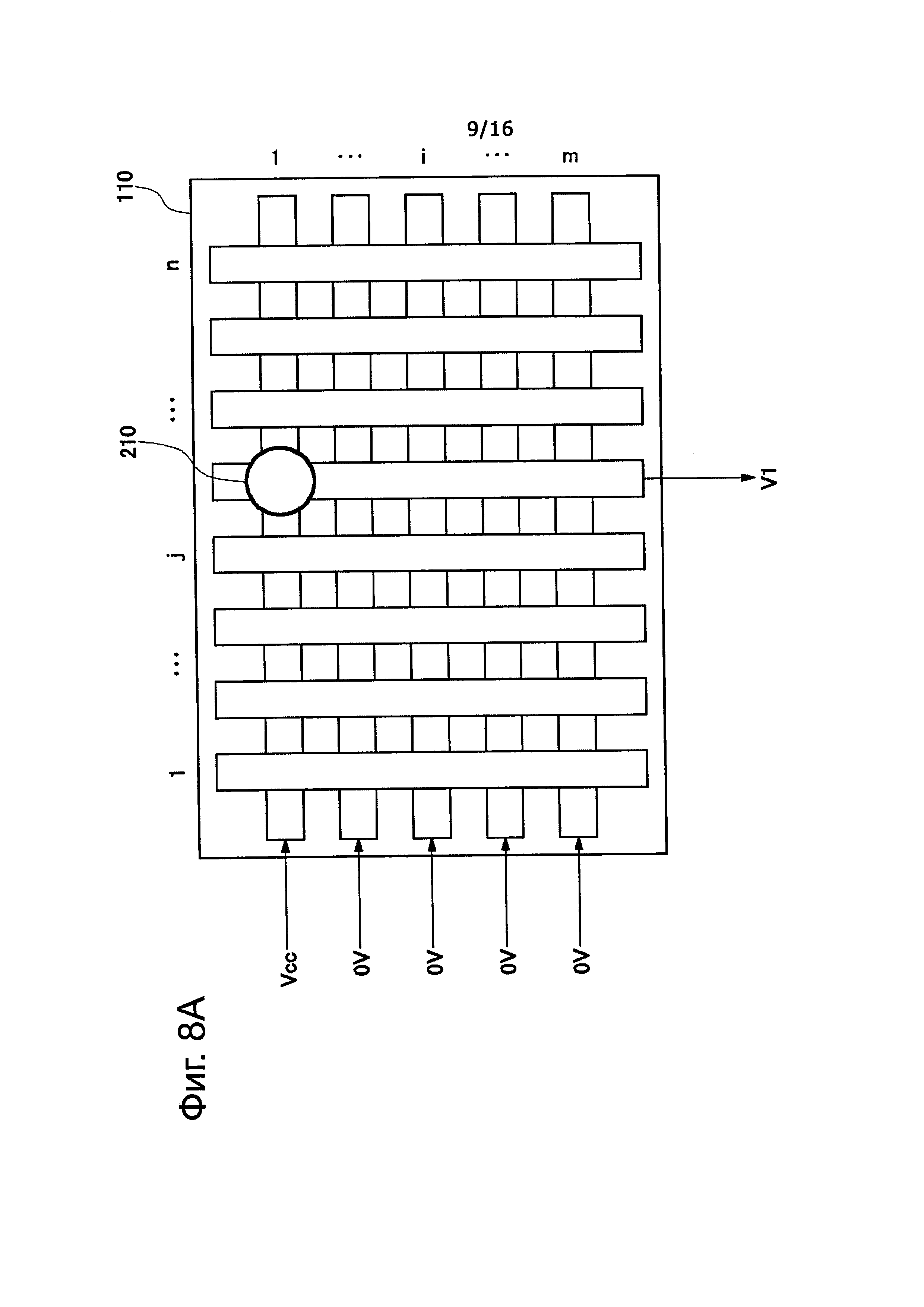
На фиг. 8А показан вид, иллюстрирующий развертку на первом этапе устройства сенсорного ввода, в соответствии с настоящим вариантом осуществления.
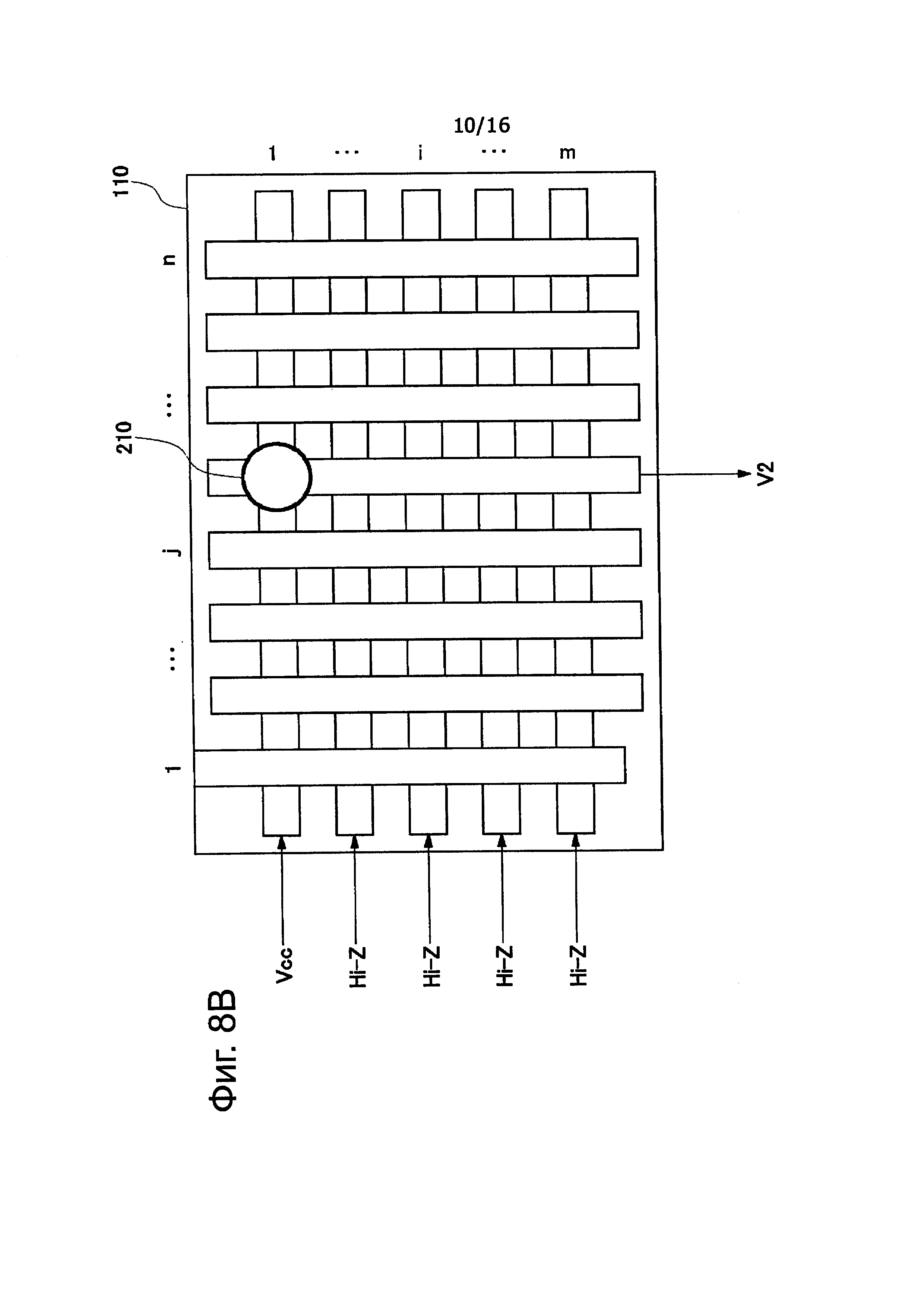
На фиг. 8В показан вид, иллюстрирующий развертку на втором этапе устройства сенсорного ввода, в соответствии с настоящим вариантом осуществления.
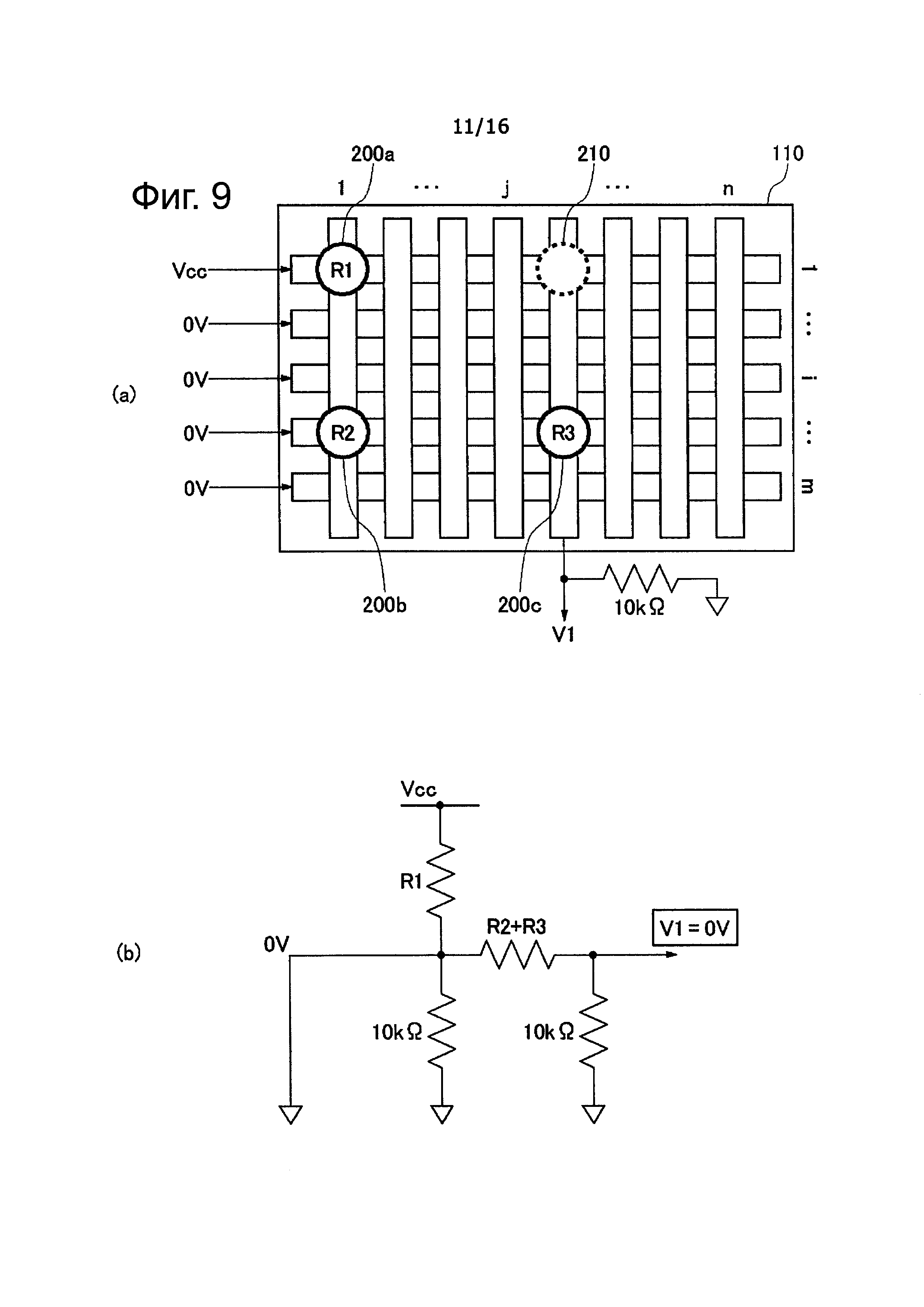
На фиг. 9 показан набор видов, иллюстрирующих принцип, в соответствии с которым исключают ложное прикосновение с помощью двухэтапного способа развертки устройства сенсорного ввода, в соответствии с настоящим вариантом осуществления.
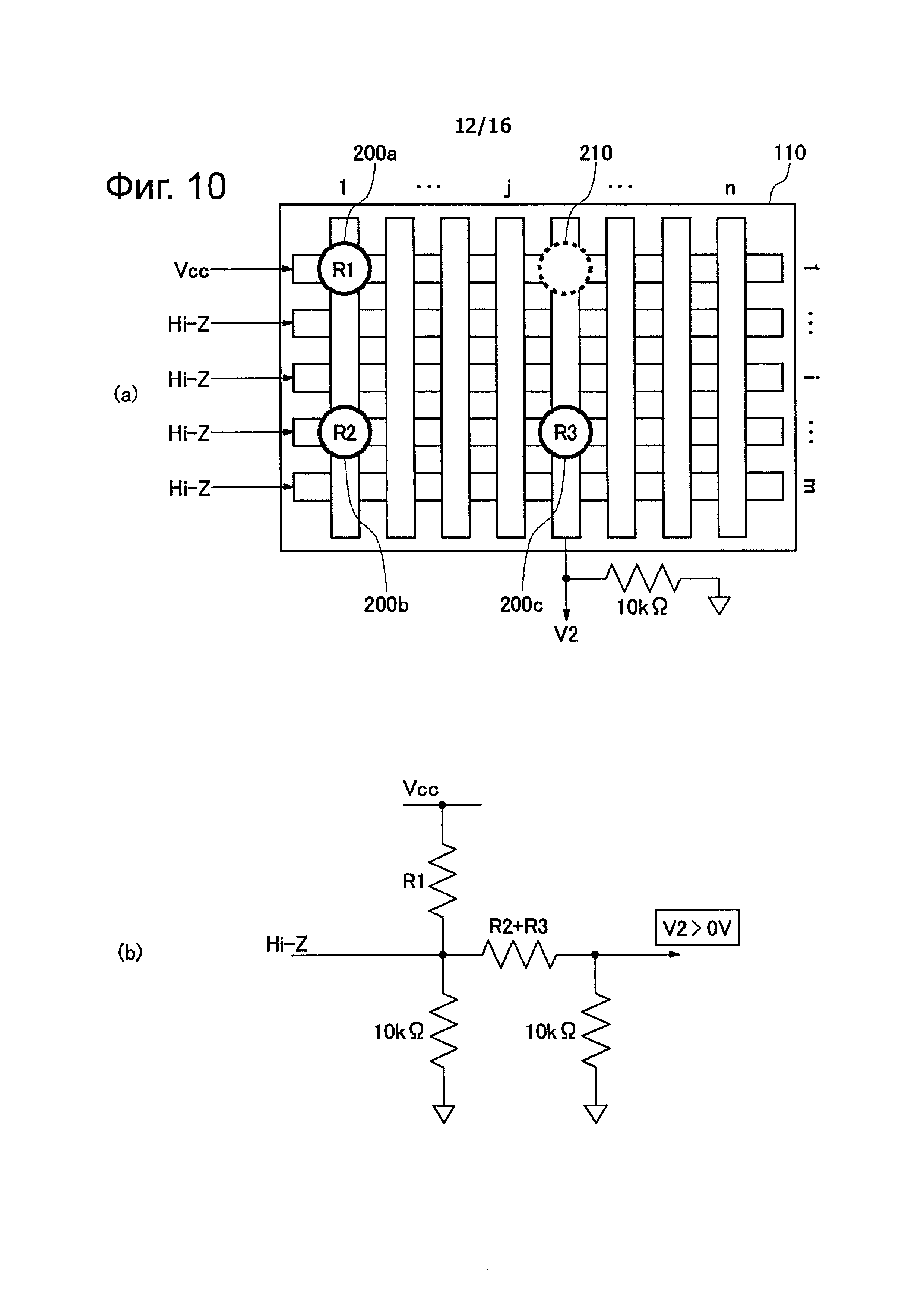
На фиг. 10 показан набор видов, иллюстрирующий принцип, в соответствии с которым исключают ложное прикосновение с помощью двухэтапного способа развертки устройства сенсорного ввода, в соответствии с настоящим вариантом осуществления.
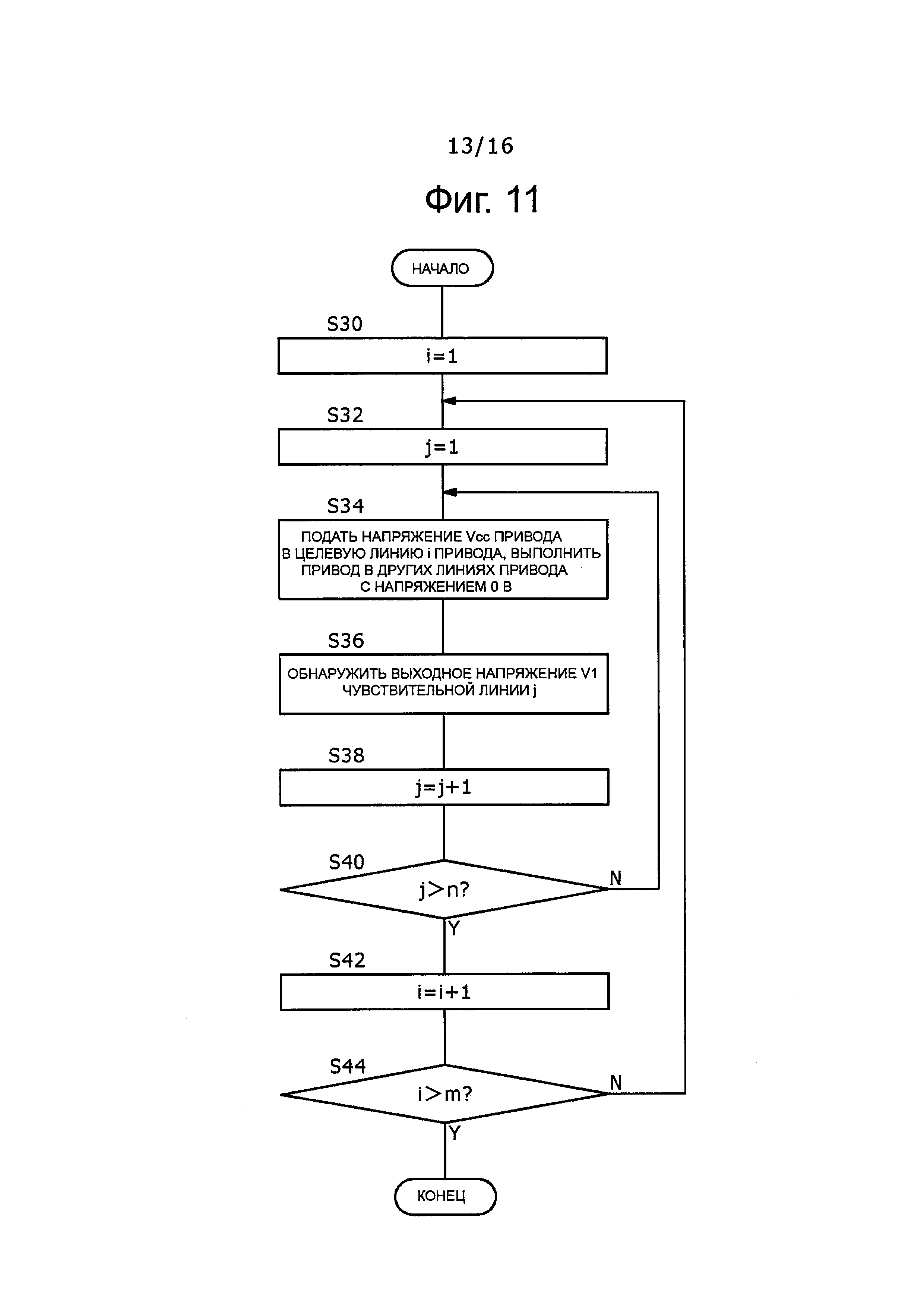
На фиг. 11 показана блок-схема последовательности операций, иллюстрирующая процедуру развертки на первом этапе.
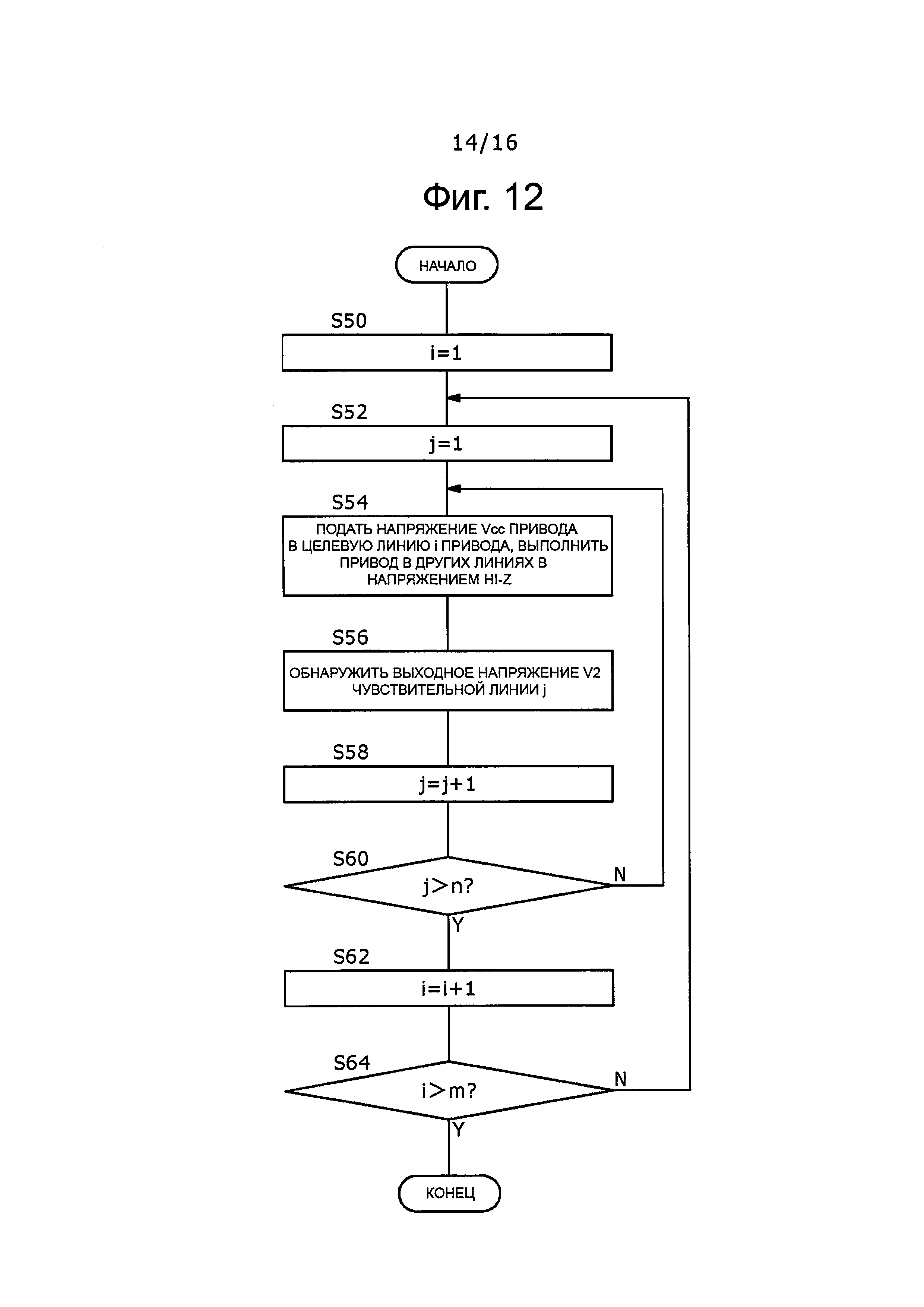
На фиг. 12 показана блок-схема последовательности операций, иллюстрирующей процедуру развертки на втором этапе.
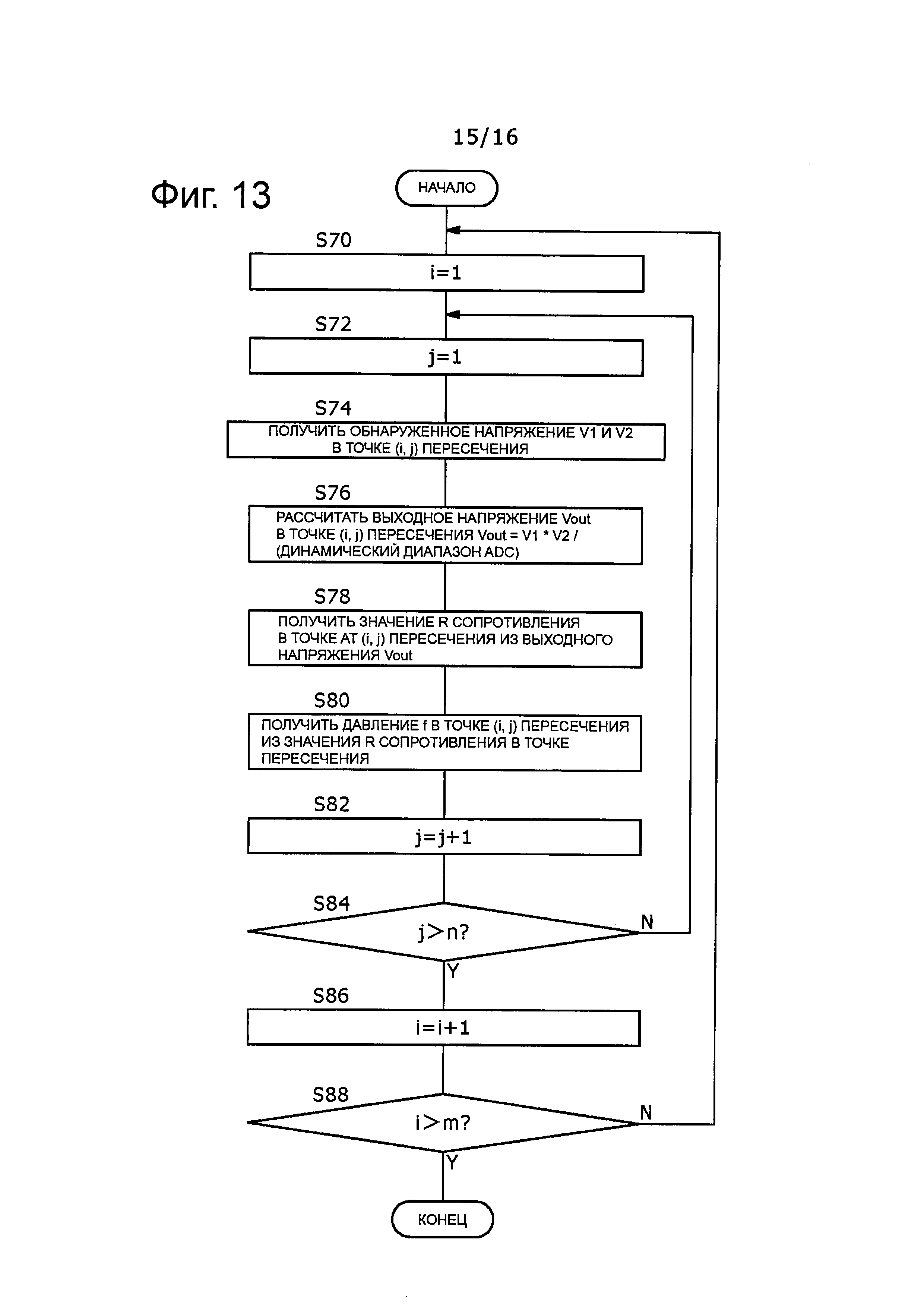
На фиг. 13 показана блок-схема последовательности операций, иллюстрирующая процедуру арифметической операции, выполняемой для выходного напряжения, обнаруживаемого в результате развертки на первом этапе, и выходного напряжения, обнаруживаемого в результате развертки на втором этапе, для определения значения сопротивления, в соответствии с давлением в целевой точке пересечения развертки.
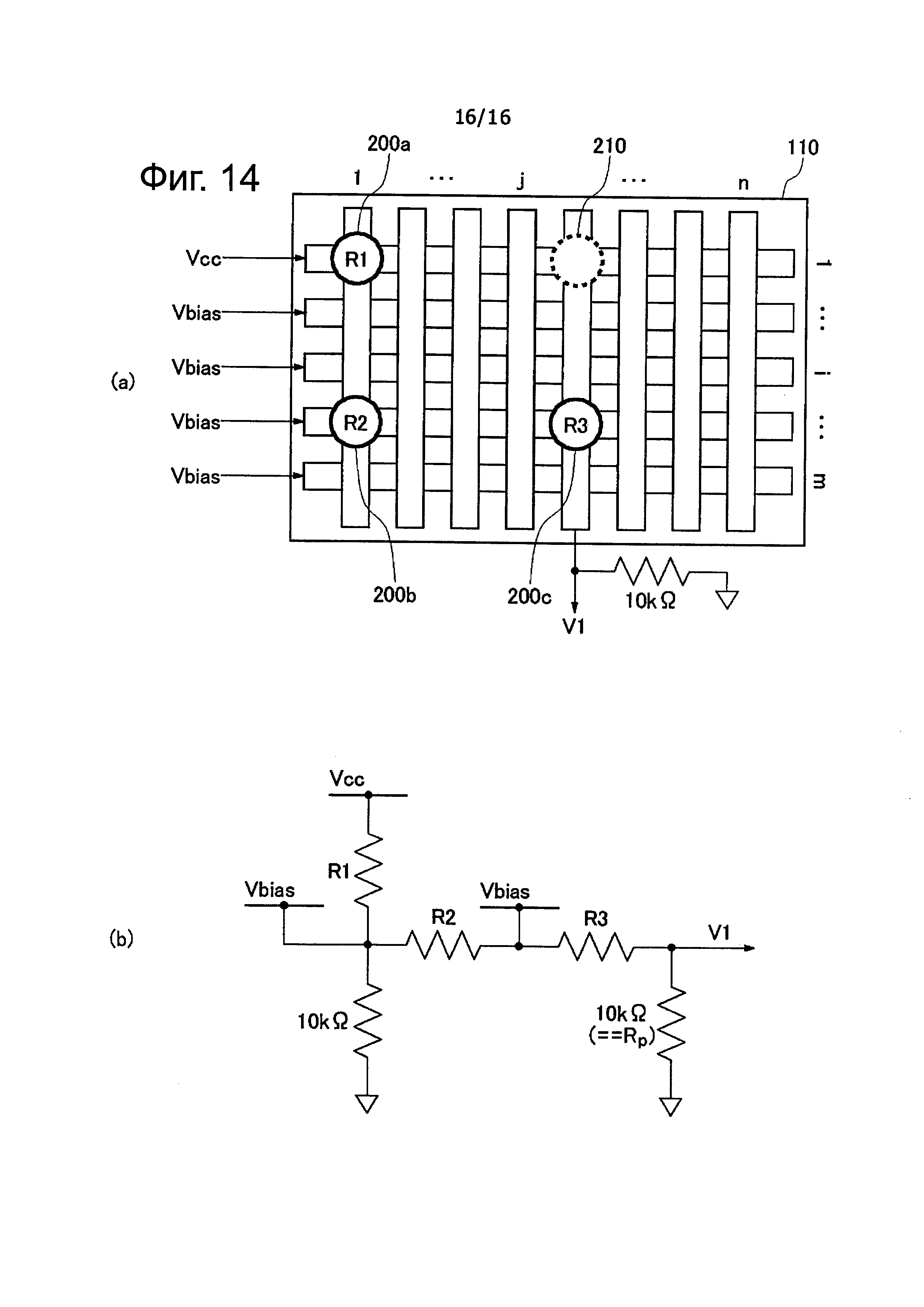
На фиг. 14 показан набор видов, иллюстрирующий модификацию, в которой напряжение привода прикладывают к линии привода, которая составляет цель развертки, и напряжение смещения прикладывают к другим линиям привода при развертке на первом этапе.
Осуществление изобретения
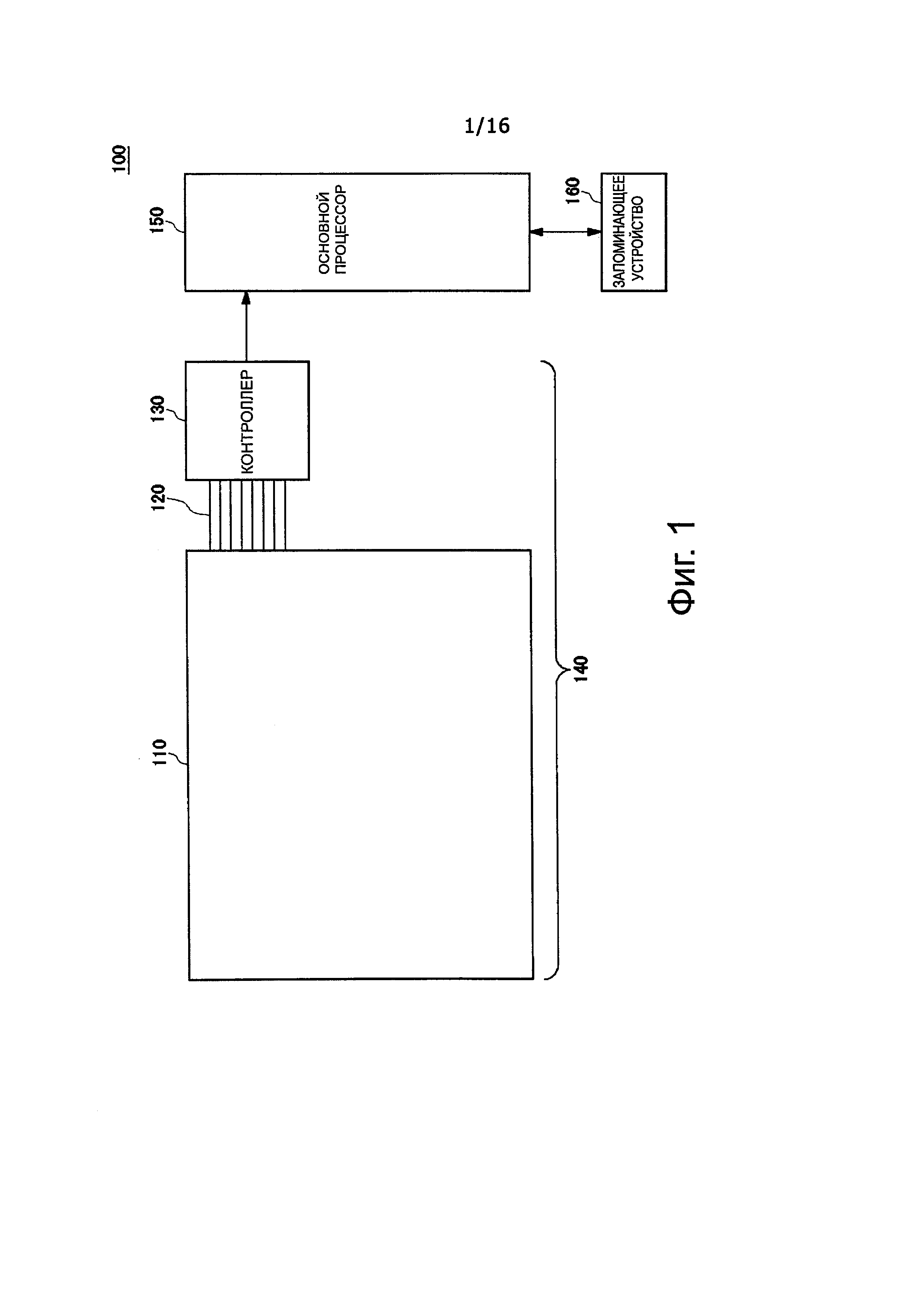
На фиг. 1 показана блок-схема устройства 100 обработки сенсорного ввода в соответствии с вариантом осуществления. Некоторые или все из функциональных компонентов устройства 100 обработки сенсорного ввода, показанного на фиг. 1, могут быть воплощены, как пример, используя аппаратные средства, программное средство или комбинацию аппаратных и программных средств, в персональном компьютере, игровом устройстве, портативном устройстве, портативном терминале и т.п.
Устройство 100 обработки сенсорного ввода включает в себя модуль 140 устройства сенсорного ввода, основной процессор 150 и запоминающее устройство 160. Модуль 140 устройства сенсорного ввода включает в себя устройство 110 сенсорного ввода и контроллер 130 устройства сенсорного ввода, соединенный с устройством 110 сенсорного ввода с помощью гибкой печатной платы 120.
Устройство 110 сенсорного ввода представляет собой устройство ввода данных, предназначенное для обнаружения точки контакта (положения пальца и т.п. (положение ниже называется "точкой (положением) прикосновения)"), и величины обнаружения ("ниже называется величиной состояния прикосновения"), такой как емкость или сопротивление, обозначающей состояние контакта в точке (положении) прикосновения.
Пример устройства 110 сенсорного ввода представляет собой сенсорную панель. Сенсорная панель представляет собой устройство в виде прозрачной панели и расположено так, что оно наложено на устройство отображения, такое как модуль жидкокристаллического дисплея или модуль органического EL (электролюминесцентного) дисплея. Следовательно, пользователь может вводить операцию на экране путем непосредственного прикосновения к сенсорной панели, при наблюдении экрана модуля отображения. Другой пример устройства 110 сенсорного ввода представляет собой сенсорную площадку. Сенсорная площадка представляет собой непрозрачное устройство сенсорного ввода, и модуль отображения не предусмотрен для сенсорной площадки.
В качестве способа обнаружения для точки прикосновения и величины состояния прикосновения для устройства 110 сенсорного ввода, доступны способ определения емкости и способ определения давления. В случае емкостного способа, контроллер 130 устройства сенсорного ввода измеряет величину вариации емкости в отдельных точках устройства 110 сенсорного ввода, для обнаружения положения точки прикосновения и величины емкости в точке прикосновения. В случае способа определения давления, контроллер 130 устройства сенсорного ввода измеряет величину вариации давления в отдельных точках устройства 110 сенсорного ввода для обнаружения положения точки прикосновения и величины давления в точке прикосновения. В настоящем варианте осуществления описан рабочий пример, в котором предполагается устройство 110 сенсорного ввода, в котором используется способ определения давления.
В качестве примера сенсорной панели такого типа, который чувствителен к давлению, доступна сенсорная площадка, на котором специальный чувствительный к давлению материал напечатан на пленке ПЭТ. Сенсорная панель такого типа, как описано выше, может обеспечивать измерение давления в пределах широкого динамического диапазона от прикосновения с очень малым давлением, таким давлением, как будто к сенсорной панели прикасаются пером, до прикосновения с очень высоким давлением, когда к сенсорной площадке прикасаются с силой, приложенной кончиком пальца.
Основной процессор 150 получает временную последовательность данных положения и величины состояния точки прикосновения, обнаруживаемой контроллером 130 устройства сенсорного ввода, и считывает и записывает эти данные в и из запоминающего устройства 160.
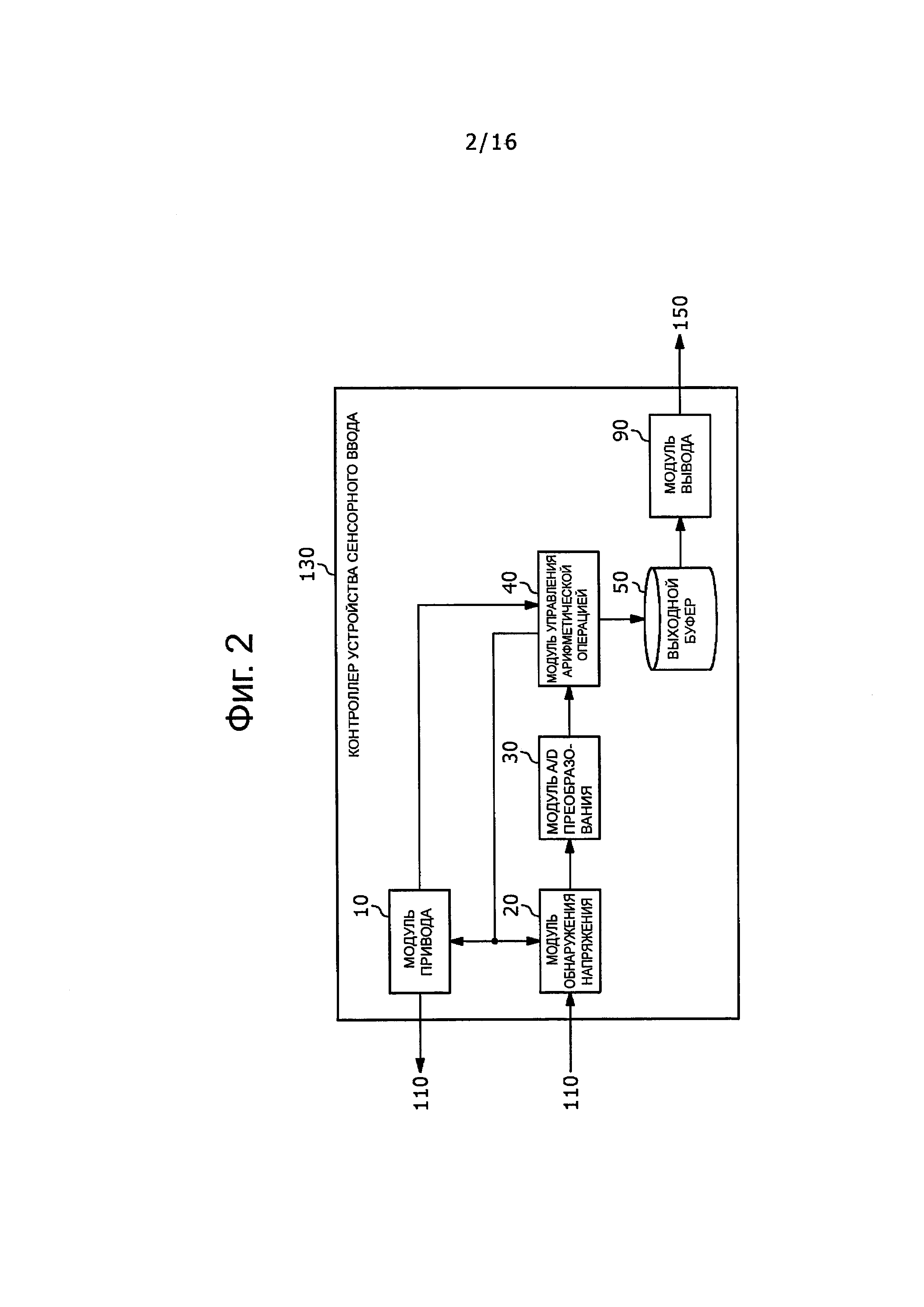
На фиг. 2 показана функциональная блок-схема контроллера 130 устройства сенсорного ввода. Контроллер 130 устройства сенсорного ввода включает в себя модуль 10 привода, модуль 20 обнаружения напряжения, модуль 30 A/D преобразования, модуль 40 управления арифметической операцией, выходной буфер 50 и выходной модуль 90.
Модуль 10 привода прикладывает напряжение привода к линии привода устройства 110 сенсорного ввода, и модуль 20 обнаружения напряжения обнаруживает выходное напряжение из чувствительной линии устройства 110 сенсорного ввода. Модуль 30 A/D преобразования выполняет A/D преобразование, обнаруживаемого выходного напряжения.
Модуль 40 управления арифметической операцией определяет, из напряжения привода и выходного напряжения, величину сопротивления резистивного элемента, чувствительного к давлению, который предусмотрен в местоположении, в котором линия привода и чувствительная линия пересекаются друг с другом. Модуль 40 управления арифметической операцией дополнительно определяет давление, приложенное к резистивному элементу, чувствительному к давлению, из характеристики резистивного элемента, чувствительного к давлению, и содержит определенное значение сопротивления и давление в выходном буфере 50. Кроме того, модуль 40 управления арифметической операцией управляет моментом времени, в который модуль 10 привода должен выполнять привод линии привода, и моментом времени, в который модуль 20 обнаружения напряжения должен выполнять развертку чувствительных линий. Выходной модуль 90 считывает данные, представляющие давление в каждой из точек пересечения между линиями привода и чувствительными линиями, из выходного буфера 50, и передает эти данные в основной процессор 150.
На фиг. 3 показан вид, представляющий внутреннюю структуру устройства 110 сенсорного ввода. Как показано на фиг. 3, в многоточечной сенсорной панели проекционного типа, линии проводника в форме полоски расположены в горизонтальном направлении и в вертикальном направлении, и чувствительный к давлению резистивный элемент нанесен в каждой из точек пересечения линий проводника. Линии проводника формируются из материала, такого как серебро, медь или углерод. Чувствительный к давлению резистивный элемент изготовлен из материала, имеющего значение сопротивления, которое в значительной степени изменяется в ответ на приложенное к нему давление.
m линий проводника (горизонтальные линии), расположенные в горизонтальном направлении устройства 110 сенсорного ввода, представляют собой линии привода для приложения напряжения, и n линий проводника (вертикальные линии), расположенные в вертикальном направлении, представляют собой чувствительные линии, для считывания значения напряжения.
Модуль 10 привода прикладывает напряжение Vcc привода к i-й одной из m линий привода, и модуль 20 обнаружения напряжения обнаруживает выходное напряжение Vout в j-й одной из n чувствительных линий. Модуль 30 A/D преобразования выполняет A/D преобразование обнаруженного выходного напряжения Vout. Модуль 40 управления арифметической операцией определяет значение R сопротивления чувствительного к давлению резистивного элемента в точке (i, j) пересечения i-й линии привода и j-й чувствительной линии из напряжения Vcc привода и выходного напряжения Vout.
Значение R сопротивления чувствительного к давлению резистивного элемента в точке (i, j) пересечения, в которой требуется определить давление, представляет собой функцию давления f, приложенного к чувствительному к давлению резистивному элементу. Поэтому, если его представить, как R(f), тогда выходное напряжение Vout может быть представлено следующим выражением, используя напряжение Vcc привода и значение R(f) сопротивления чувствительного к давлению резистивного элемента в точке пересечения:

Здесь, Rp представляет собой резистор утечки Rp, соединенный с каждой из чувствительных линий. Это обеспечивает действие стабилизации значения напряжения чувствительной линии, когда к точке пересечения не прикасаются при 0 вольт. Значение резистора утечки Rp устанавливается в соответствии с диапазоном вариации значения сопротивления чувствительного к давлению резистивного элемента. Резистор Rp утечки имеет сопротивление, установленное как большая величина относительно максимального значения обнаруживаемого сопротивления R(f). Например, значение резистора утечки Rp обычно устанавливают, как значение, например, равное от 1 кОм до 100 кОм.
Когда к точке пересечения не прикасаются, поскольку R(f)→∞, Vout→0. Если к точке пересечения легко прикасаются, тогда R(f)→0 и, поэтому, Vout→Vcc.
Если решить представленное выше уравнение для R(f), тогда будет получено следующее выражение:

Следовательно, если выходное напряжение, Vout, будет обнаружено при напряжении Vcc привода, то может быть определена величина R(f) сопротивления чувствительного к давлению резистивного элемента в точке пересечения.
Если линия привода и чувствительная линия последовательно изменяются для выполнения измерения выходного напряжения Vout, тогда может быть получена величина R(f) сопротивления чувствительного к давлению резистивного элемента во всех точках пересечения. В случае, когда количество линий привода равно m, и количество чувствительных линий равно n, обнаружение и A/D преобразование выходного напряжения выполняются m×n раз.
На фиг. 4 показан график, иллюстрирующий взаимосвязь между давлением f, приложенным к резистивному элементу, определяющему напряжение, и значением R сопротивления элемента, чувствительного к давлению. Единица давления f представляет собой Н/м2, и единица величины R сопротивления представляет собой ом. Сила, единица измерения которой представляет собой Н, может использоваться вместо давления. Кривая f-R, обычно представляется как монотонно понижающаяся кривая, как представлено на фиг. 4, и по мере увеличения давления величина сопротивления уменьшается. Числа порядка и форма кривой различаются в зависимости от материала чувствительного к давлению резистивного элемента. Таблица, представляющая график f-R характеристики чувствительного к давлению резистивного элемента, содержится в выходном буфере 50.
Модуль 40 управления арифметической операцией определяет давление f, соответствующее величине R сопротивления чувствительного к давлению резистивного элемента на основе графика или таблицы, представляющей характеристику f-R чувствительного к давлению резистивного элемента, и сохраняет давление f в определенной точке пересечения, в выходном буфере 50. Если давление f равно 0 или равно, или больше, чем заданное пороговое значение, тогда можно рассматривать, что произошло прикосновение в точке пересечения. Выходной модуль 90 считывает данные, представляющие давление в каждой точке пересечения, из выходного буфера 50, и выводит эти данные.
На фиг. 5 показана блок-схема последовательности операций, иллюстрирующая процедуру определения чувствительной к давлению многоточечной сенсорной панели.
Переменную i для обозначения линии привода инициируют в 1 (S10). Другую переменную j, для обозначения чувствительной линии, инициируют в 1 (S12).
Модуль 10 привода подает напряжение Vcc привода в линию i привода устройства 110 сенсорного ввода (S14). Модуль 20 обнаружения напряжения обнаруживает выходное напряжение Vout чувствительной линии j устройства 110 сенсорного ввода, и модуль 30 A/D преобразования выполняет A/D преобразование обнаруживаемого выходного напряжения Vout (S16). Модуль 40 управления арифметической операцией вычисляет значение R сопротивления чувствительного к давлению резистивного элемента в точке (i, j) пересечения из напряжения привода Vcc и выходного напряжения Vout в соответствии с выражением (2), представленным выше (S18). Модуль 40 управления арифметической операцией определяет давление f, приложенное к точке (i, j) пересечения из значения R сопротивления чувствительного к давлению резистивного элемента на основе кривой (S20) f-R.
Переменную j для обозначения чувствительной линии последовательно увеличивают на 1 (S22), и если переменная j равна или меньше, чем n (Ν на этапе S24), тогда обработка возвращается на этап S14, и затем этапы S14-S22 повторяются. Если переменная j больше, чем n (Y на этапе S24), тогда переменная i для обозначения линии привода последовательно увеличивается на 1 (S26). Если переменная i равна или меньше, чем m (Ν на этапе S28), тогда обработка возвращается на этап S12 и затем этапы S12-S26 повторяются. Если переменная i больше, чем m (Y на этапе S28), тогда обработка заканчивается.
Многоточечный сенсорный ввод может быть обнаружен, используя такую сенсорную процедуру, как описано выше. Однако, в частности, в случае сенсорной панели/сенсорной площадки чувствительного к давлению типа, при обнаружении многоточечного сенсорного ввода, иногда возникает проблема "ложного прикосновения", состоящая в том, что давление f обнаруживается в точке пересечения, в которой фактически отсутствует прикосновение.
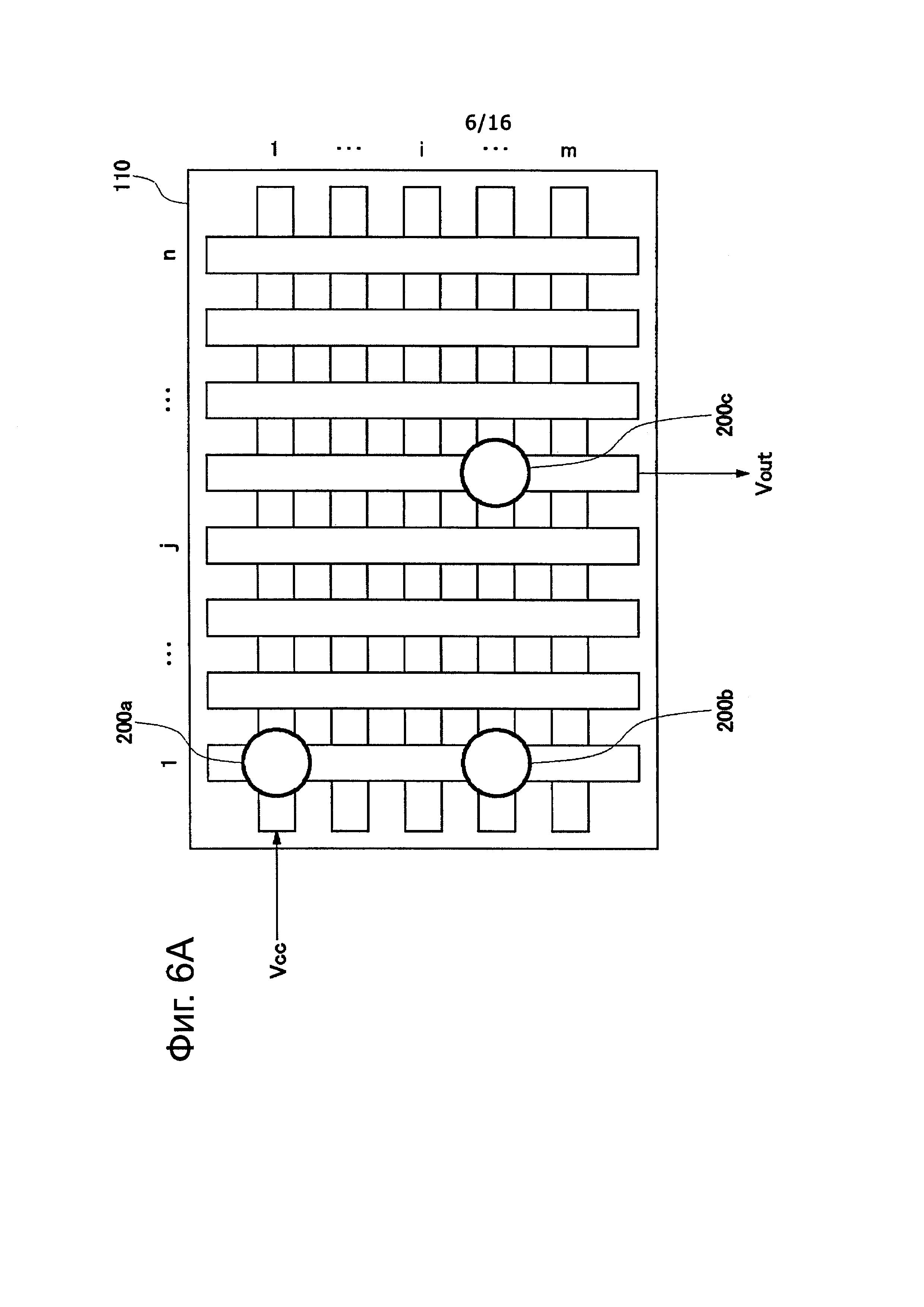
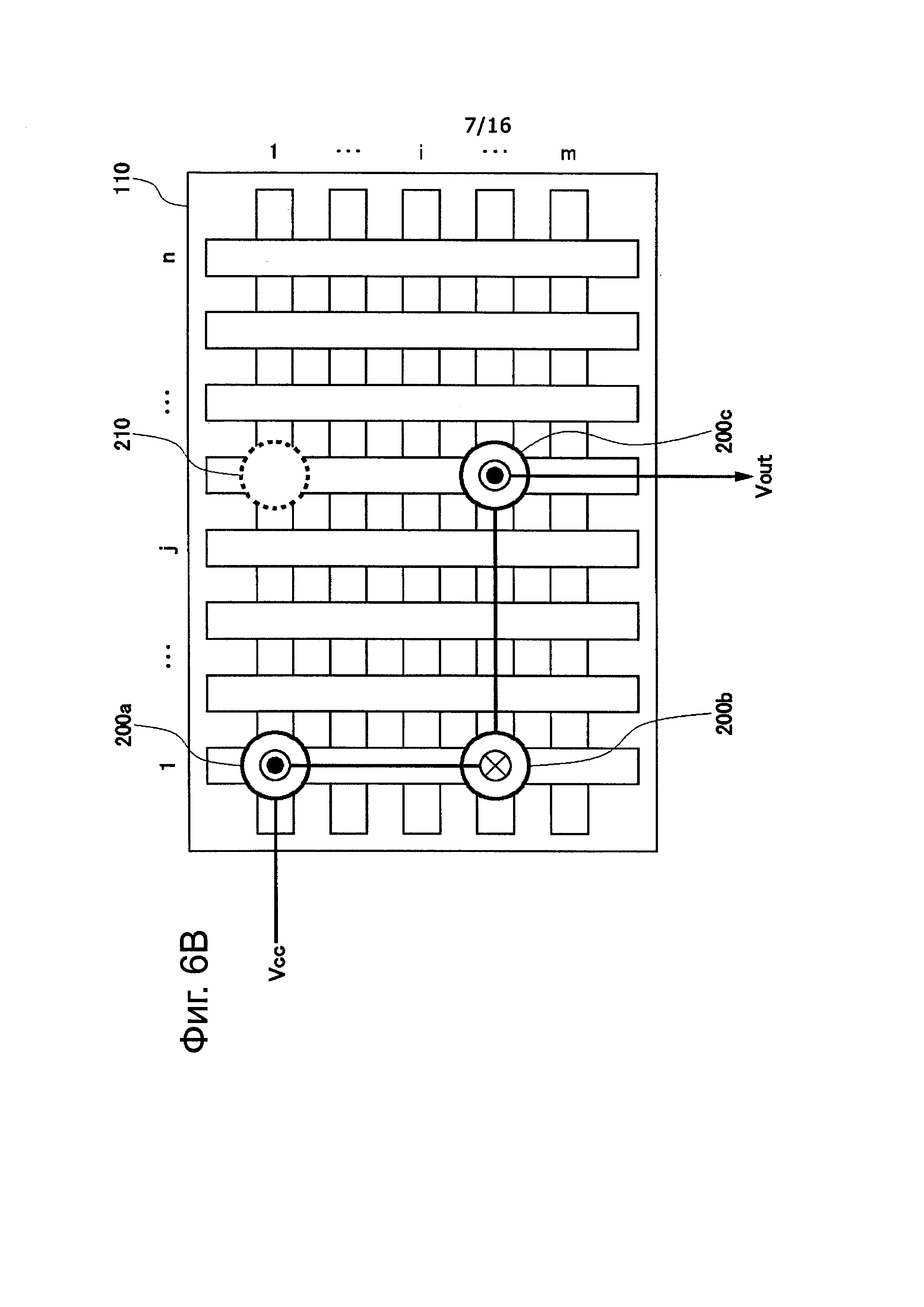
На фиг. 6А и 6В показаны виды, иллюстрирующие ложное прикосновение, которое возникает при многоточечном сенсорном вводе.
Предполагается, что в устройстве 110 сенсорного ввода точка (1, 1) пересечения (номер 200а ссылочной позиции), другая точка (4, 1) пересечения (номер 200b ссылочной позиции) и дополнительная точка (4, 5) пересечения (номер 200с ссылочной позиции) фактически прикасаются, как представлено на фиг. 6А. Предполагается, что, в то время, как к трем точкам прикоснулись одновременно, напряжение Vcc привода поступает в линию 1 привода, и обнаруживают выходное напряжение Vout в чувствительной линии 5. Поскольку в точке пересечения (1, 5) прикосновение отсутствует в принципе, значение R сопротивления чувствительного к давлению резистивного элемента в точке (1, 5) пересечения будет бесконечным, и считается, что выходное напряжение Vout равно 0.
Однако, поскольку нажатие произошло в трех точках прикосновения, если выходное напряжение Vout будет обнаружено в чувствительной линии 5, в состоянии, в котором напряжение Vcc привода приложено к линии 1 привода, тогда ток протекает, как обозначено сплошными линиями, представленными на фиг. 6В. В частности, ток поступает через линию 1 привода, протекает через чувствительный к давлению резистивный элемент в точке (1, 1) пересечения, входит в чувствительную линию 1 и проходит через чувствительный к давлению резистивный элемент в точке (4, 1) пересечения, дополнительно поступает в линию 4 привода и протекает через чувствительный к давлению резистивный элемент в точке (4, 5) пересечения и, в конечном итоге, выходит через чувствительную линию 5. Следовательно, хотя в точке (1, 5) пересечения (номер 210 ссылки) фактически отсутствует прикосновение, когда напряжение Vcc привода подают в линию 1 привода, выходное напряжение Vout, которое не равно 0, обнаруживается в чувствительной линии 5. В результате, считается, что давление f, которое не равно 0, приложено к чувствительному к давлению резистивному элементу в точке (1, 5) пересечения. Эта проблема называется "ложным прикосновением".
На фиг. 7 показан вид, иллюстрирующий способ развертки обычной чувствительной к давлению многоточечной сенсорной панели. Обычно, когда выполняют развертку точек пересечения линий проводника, напряжение Vcc привода прикладывают только к линии привода, которая представляет собой цель развертки, в то время, как другие линии привода переводят в состояние высокого импеданса (hi-Z). Следовательно, другие линии, кроме линии, в которой должен быть обнаружен сигнал, могут быть электрически изолированными, и чувствительность, и динамический диапазон при измерении давления могут быть увеличены. Однако, поскольку другие линии привода, кроме линии привода, которая представляет собой цель развертки, могут принимать любой потенциал, протекает такой ток, как описано выше, со ссылкой на фиг. 6В. Поэтому, невозможно избежать того, что возникает ложное прикосновение в точке пересечения (номер 210 ссылочной позиции) между линией привода, которая представляет собой цель развертки, и чувствительной линией.
Поэтому, в настоящем варианте осуществления, применяется двухкаскадный способ развертки; описанный со ссылкой на фиг. 8А и 8В. На фиг. 8А иллюстрируется развертка на первом этапе, и на фиг. 8В иллюстрируется развертка на втором этапе.
На первом этапе выполняют развертку в точке (1, 5) пересечения, модуль 10 привода прикладывает напряжение Vcc привода к линии 1 привода и прикладывает к другим линиям 2-5 привода напряжение 0 вольт, в то время как модуль 20 обнаружения напряжения обнаруживает выходное напряжение V1 в чувствительной линии 5, как представлено на фиг. 8А, и модуль 30 A/D преобразования выполняет A/D преобразование обнаруживаемого выходного напряжения V1. В ходе развертки точки (1, 5) пересечения, как описано здесь, также в отношении других точек пересечения, напряжение Vcc привода прикладывают к целевой линии 1 привода развертки, в то время, как к другим линиям привода - прикладывают 0 вольт, и выходное напряжение V1 обнаруживают аналогично в чувствительной линии.
На втором этапе, когда требуется выполнить развертку точки (1, 5) пересечения, модуль 10 привода прикладывает напряжение Vcc привода к линии 1 привода и помещает другие линии 2-5 привода в состояние высокого напряжения, в то время как модуль 20 обнаружения напряжения обнаруживает выходное напряжение V2 в чувствительной линии 5, как представлено на фиг. 8В, и модуль 30 A/D преобразования выполняет A/D преобразование обнаруживаемого выходного напряжения V2. Способ развертки на втором этапе является таким же, как и обычный способ развертки на фиг. 7.
Модуль 40 управления арифметической операцией умножает выходное напряжение V1, обнаруживаемое на первом этапе, и выходное напряжение V2, обнаруживаемое на втором этапе, и делит произведение на динамический диапазон A/D преобразования для определения конечного выходного напряжения Vout:
Vout=V2×V1/(динамический диапазон ADC)
Далее, модуль 40 управления арифметической операцией определяет значение R сопротивления в точке пересечения из напряжения Vcc привода и выходного напряжения Vout, в соответствии с выражением (2), и определяет давление f в точке пересечения из графика f-R.
Со ссылкой на фиг. 9 и 10 будет описано, что ложное прикосновение устраняют, используя технологию двойной развертки, представленную на фиг. 8А и 8В.
Вначале рассматривают случай, в котором фактически прикасаются к трем точкам, таким как точка (1, 1) пересечения (номер 200а ссылочной позиции), другая точка (4, 1) пересечения (номер 200b ссылочной позиции) и дополнительная точка (4, 5) пересечения (номер 200 с ссылочной позиции), в то время как в дополнительной точке (1, 5) пересечения фактически отсутствует прикосновение. Значения сопротивления чувствительных к давлению резистивных элементов в точках (1, 1), (4, 1) и (4, 5) пересечения представлены, как R1, R2 и R3, соответственно.
На фиг. 9(а) показан вид, иллюстрирующий выходное напряжение V1, обнаруживаемое с помощью развертки на первом этапе, и на фиг. 9(b) представлена эквивалентная схема для фиг. 9(а). Как представлено на фиг. 9(а), напряжение Vcc привода прикладывают к линии 1 привода, и к линии 4 привода прикладывается напряжение 0 вольт, и резистор 10 кОм подключен, как резистор Rp утечки к чувствительной линии 5. В это. время, когда к линии привода приложено напряжение 0 вольт, как представлено на фиг. 9(b), когда к точке (1, 5) пересечения фактически не прикасаются, выходное напряжение V1 составляет 0 вольт без ошибки.
Если напряжение Vcc привода приложено к линии 1 привода, которая представляет собой цель развертки, и 0 вольт приложено к другим линиям 2-5 привода таким же образом, тогда не обнаруживается ложное прикосновение. Даже если только выполняется развертка на первом этапе, в принципе, выполняется устранение ложного прикосновения. Однако, при фактическом прикосновении пальцем, палец прикасается не только к чувствительному к давлению резистивному элементу в положении прикосновения, но также и к проводникам вокруг положения прикосновения, в зависимости от толщины пальца. Поскольку к окружающим линиям привода приложено напряжение 0 вольт, происходит падение напряжения. Поэтому, если в точке (1, 5) пересечения фактически отсутствует ложное прикосновение, тогда значение выходного напряжения V1 падает до 0 вольт в окружающих линиях привода, в результате чего, происходит деградация разрешения значения давления. Поэтому, более предпочтительно комбинировать результат развертки на втором этапе для повышения чувствительности обнаружения.
На фиг. 10(а) показан вид, иллюстрирующий выходное напряжение V2, обнаруживаемое в результате развертки на втором этапе, и на фиг. 10(b) показана эквивалентная схема для фиг. 10(а). Как представлено на фиг. 10(а), напряжение Vcc привода прикладывают к линии 1 привода, линия 4 привода переводится в состояние высокого импеданса, и резистор 10 кОм подключен, как резистор Rp утечки к чувствительной линии 5. В это время, поскольку линия 4 привода находится в состоянии высокого импеданса, когда к точке (1, 5) пересечения фактически не прикасаются, выходное напряжение V2 проявляет положительное значение (не равно нулю), как представлено на фиг. 10(b). Другими словами, поскольку развертка на втором этапе является такой же, как обычная развертка, обнаруживается ложное прикосновение.
Когда в точке (1, 5) пересечения фактически отсутствует прикосновение, если выходное напряжение V1, обнаруживаемое на первом этапе, и выходное напряжение V2, обнаруживаемое на втором этапе, умножить и затем разделить на динамический диапазон A/D преобразования, для определения конечного выходного напряжения Vout, то поскольку V1=0 и V2>0, Vout=V2×V1/(динамический диапазон ADC)=0. Другими словами, поскольку V1=0, ложное прикосновение устраняется и не обнаруживается.
Теперь будет исследован случай, в котором, в точке (1, 5) пересечения, фактически произошло прикосновение. В этом случае, при развертке на первом этапе, когда значение сопротивления чувствительного к давлению резистивного элемента в точке (1, 5) пересечения представлено, как R0, поскольку в точке (1, 5) пересечения фактически произошло прикосновение, выходное напряжение V1=Vcc×Rp/(R0+Rp) обнаруживается в соответствии с выражением (1), представленным выше. Другими словами, V1≠0. Также при развертке на втором этапе, аналогично обнаруживается выходное напряжение V2=Vcc×Rp/(R0+Rp). Однако, обнаруживается более низкое выходное напряжение V1, чем выходное напряжение V2 (V1<V2), в связи с таким падением напряжения, как описано выше. Следовательно, когда в точке (1, 5) пересечения фактически отсутствует прикосновение, если определяется конечное напряжение Vout, тогда Vout=V2×V1/(динамический диапазон ADC)≠0. Другими словами, поскольку V1≠0, в случае, когда фактически происходит прикосновение к точке (1, 5) пересечения, выходное напряжение Vout получают с высокой чувствительностью.
Как описано выше, в результате умножения выходного напряжения V1, обнаруживаемого при развертке на первом этапе, и выходного напряжения V2, обнаруживаемого при развертке на втором этапе, для определения конечного выходного напряжения Vout, в случае ложного прикосновения, выходное напряжение Vout равно 0 и ложное прикосновение устраняется. Однако, в случае фактического прикосновения, выходное напряжение Vout обнаруживают с высокой чувствительностью.
Используя способ определения, в соответствии с настоящим вариантом осуществления, развертку требуется выполнить два раза. Однако если микрокомпьютер и встроенный A/D преобразователь имеют достаточно высокие характеристики, тогда не возникает каких-либо проблем при использовании на практике. Кроме того, хотя необходимо управлять линиями привода в трех электрических состояниях Vcc, 0 вольт и Hi-Z, поскольку портом I/O общего микрокомпьютера можно управлять для трех этапов, используя программное обеспечение, также при установке, не требуется дополнительный аппаратный компонент.
На фиг. 11-13 показаны блок-схемы последовательности операций, иллюстрирующие процедуру определения устройства 110 сенсорного ввода, в соответствии с настоящим вариантом осуществления.
На фиг. 11 показана блок-схема последовательности операций, иллюстрирующая процедуру развертки на первом этапе.
Переменную i для обозначения линии привода инициализируют в 1 (S30). Другую переменную j, для обозначения чувствительной линии инициализируют в 1 (S32).
Модуль 10 привода подает напряжение Vcc привода в линию i привода и выполняет привод других линий привода, используя напряжение 0 В (S34). Модуль 20 обнаружения напряжения обнаруживает выходное напряжение V1 чувствительной линии j, и модуль 30 A/D преобразования выполняет A/D преобразование для обнаруженного выходного напряжения V1 (S36). Обнаруженное выходное напряжение V1 содержится в выходном буфере 50.
Переменную j, для обозначения чувствительной линии последовательно увеличивают на 1 (S38), и если переменная j будет равна или меньше, чем n (Ν на этапе S40), тогда обработка возвращается на S34 для повторения этапов с этапа S34 по этап S38. Если переменная j больше, чем n (Y на этапе S40), тогда линию i привода, для обозначения линии привода последовательно увеличивают на 1 (S42), и если переменная i равна или меньше, чем m (Ν на этапе S44), тогда обработка возвращается на этап S32, для повторения этапов с этапа S32 по этап S42. Если переменная i больше, чем m (Y на этапе S44), тогда обработка заканчивается.
На фиг. 12 показана блок-схема последовательности операций, иллюстрирующая процедуру развертки на втором этапе.
Переменную i, для обозначения линии привода, инициализируют в 1 (S50). Переменную j, для обозначения чувствительной линии, инициализируют в 1 (S52).
Модуль 10 привода подает напряжение Vcc привода в линию i привода и устанавливает другие линии привода в состояние Hi-Z (S54). Модуль 20 обнаружения напряжения обнаруживает выходное напряжение V2 чувствительной линии j, и модуль 30 A/D преобразования выполняет A/D преобразование обнаруженного выходного напряжения V2 (S56). Обнаруженное выходное напряжение V2 содержится в выходном буфере 50.
Переменную j для обозначения чувствительной линии последовательно увеличивают на 1 (S58), и если переменная j равна или меньше, чем n (Ν на этапе S60), тогда обработка возвращается на этап S54, для повторения этапов с этапа S54 до этапа S58. Если переменная j больше, чем n (Y на этапе S60), тогда переменную i для обозначения линии привода последовательно увеличивают на 1 (S62), и если переменная i равна или меньше, чем m (Ν на этапе S64), тогда обработка возвращается на этап S52 для повторения этапов с этапа S52 по этап S62. Если переменная I больше, чем m (Y на этапе S64), тогда обработка заканчивается.
На фиг. 13 показана блок-схема последовательности операций, иллюстрирующая процедуру арифметической операции в отношении выходного напряжения V1, обнаруживаемого при развертке на первом этапе, и выходного напряжения V2, обнаруживаемого при развертке на втором этапе, для определения конечного выходного напряжения Vout, и определения значения сопротивления и давления в точке пересечения цели развертки.
Переменную i для обозначения линии привода инициализируют в 1 (S70). Переменную j, для обозначения чувствительной линии, инициализируют в 1 (S72).
Модуль 40 управления арифметической операцией получает выходное напряжение V1, обнаруживаемое при развертке на первом этапе, и выходное напряжение V2, обнаруживаемое при развертке на втором этапе точки (i, j) пересечения из выходного буфера 50 (S74). Модуль 40 управления арифметической операцией умножает напряжение V1 обнаружения на первом этапе и напряжение V2 обнаружения на втором этапе, и затем делит произведение на динамический диапазон A/D преобразования, для расчета конечного выходного напряжения Vout из точки (i, j) пересечения (S76).
Модуль 40 управления арифметической операцией рассчитывает значение R сопротивления чувствительного к давлению резистивного элемента в точке (i, j) пересечения из напряжения Vcc привода, и конечное выходное напряжение Vout, в соответствии с выражением (2), представленным выше (S78). Модуль 40 управления арифметической операцией определяет давление f, приложенное к точке (i, j) пересечения, из значения R сопротивления чувствительного к давлению резистивного элемента на основе кривой f-R (S80).
Переменную j, для обозначения чувствительной линии последовательно увеличивают на 1 (S82), и если переменная j равна или меньше, чем n (Ν на этапе S 84), тогда обработка возвращается на этап S74 для повторения обработки с этапа S74 по этап S82. Если переменная j больше, чем n (Y на этапе S84), тогда переменную i, для обозначения линии привода последовательно увеличивают на 1 (S86), и если переменная i равна или меньше, чем m (Ν на этапе S88), тогда обработка возвращается на этап S72 для повторения этапов с этапа S72 по этап S86. Если переменная i больше, чем m (Y на этапе S88), тогда обработка заканчивается.
В представленном выше описании, при развертке на первом этапе, напряжение Vcc привода прикладывают к целевой линии привода развертки, в то время, как выполняют привод других линий привода, используя напряжение 0 вольт. Однако, даже если напряжение Vbias смещения, которое меньше, чем напряжение Vcc привода, но не равно 0, приложено к другим линиям привода, может быть воплощено аналогичное восприятие. Модификация, в которой напряжение Vbias смещения прикладывается к другим линиям привода, описана со ссылкой на фиг. 14.
На фиг. 14(а) показан вид, иллюстрирующий выходное напряжение V1, обнаруживаемое при развертке на первом этапе, в модификации, в которой напряжение Vcc привода прикладывают к линии привода, которая представляет собой цель развертки, и напряжение Vbias смещения, которое не равно нулю, прикладывают к другим линиям привода. На фиг. 14(b) показана эквивалентная схема для фиг. 14(а).
Как представлено на фиг. 14(а), напряжение Vcc привода прикладывают к линии 1 привода и напряжение смещения Vbias прикладывают к линии 4 привода, и резистор 10 кОм подключен, как резистор Rp утечки к чувствительной линии 5. В это время, поскольку привод линии 4 привода осуществляют, используя напряжение Vbias смещения, как представлено на фиг. 14(b), когда в точке (1, 5) пересечения прикосновение фактически отсутствует, выходное напряжение V1-V1=Vbias×Rp/(Rp+R3). Здесь, если Vcc>Vbias, тогда выходное напряжение V1 не проявляет значение, равное или большее, чем напряжение смещения Vbias. В соответствии с этим, даже если ложное прикосновение будет обнаружено в точке (i, j) пересечения (номер 210 ссылочной позиции), выходное напряжение V1 будет подавлено до напряжения Vbias смещения или меньше.
Напряжение VR(f1)=Vcc×Rp/(Rp+R(f1)), обнаруживаемое, когда чувствительный к давлению резистивный элемент, соответствующий самому низкому давлению f1, которое должно быть обнаружено, имеет значение R (f1) сопротивления, определяют заранее. Если напряжение Vbias смещения других линий привода, кроме линии привода, которая представляет собой цель развертки, будет установлено равным или меньше, чем это напряжение VR(f1), тогда, когда выходное напряжение V1 равно или ниже, чем напряжение Vbias смещения, выходное напряжение V1 получается в результате ложного прикосновения, и процесс отмены, для отмены выходного напряжения V1, может быть выполнен. Способ обнаружения выходного напряжения V2 при развертке на втором этапе является таким же, как и способ, описанный выше со ссылкой на фиг. 10. Конечное выходное напряжение Vout может быть определено в соответствии со следующим выражением:
Vout=V2×(V1-Vbias)/(динамический диапазон ADC)
Следует отметить, однако, что в случае, когда удовлетворяется Vout<0 (а именно, удовлетворяется V1<Vbias), Vout=0.
Таким образом, также в случае модификации, в котором напряжение Vbias смещения, которое не равно нулю, будет приложено к другим линиям привода, кроме линии привода, которая представляет собой цель развертки, ложное прикосновение может быть исключено. Однако следует отметить, что слабое прикосновение, давление которого составляет вплоть до самого низкого представленного выше давления f1, которое обнаруживается, рассматривается, как ложное прикосновение, хотя фактически прикосновение было выполнено, и, следовательно, выходное напряжение V1 будет исключено. Поскольку сенсорный ввод при таком низком давлении, как было только что описано выше, обычно имеет плохое отношение S/N, когда отношение S/N является не соответствующим, в зависимости от использования окружающей среды устройства, например, когда высоки шумы источника питания, эффективно выполняют модификацию описанного выше.
Настоящее изобретение было описано со ссылкой на его вариант осуществления. Этот вариант осуществления является примерным, и специалисты в данной области техники могут понять, что различные модификации могут использоваться, как комбинация компонентов или процессов и что также такие модификации попадают в пределы объема настоящего изобретения.
Среди функциональных компонентов, представленных в контроллере 130 устройства сенсорного ввода, по меньшей мере, часть функциональных компонентов могут быть встроены, используя основной процессор 150 и запоминающее устройство 160. Например, функция модуля 40 управления арифметической операцией может быть встроена в основной процессор 150, и выходной буфер 50 может быть обеспечен в запоминающем устройстве 160. В этом случае модуль 90 вывода передает выходное напряжение V1, обнаруживаемое при развертке на первом этапе, и выходное напряжение V2, обнаруживаемое при развертке на втором этапе, в основной процессор 150. Основной процессор 150 выполняет: арифметическую операцию для определения конечного выходного напряжения Vout из обнаруживаемых напряжений V1 и V2 на первом этапе, и втором этапе, соответственно; арифметическая операция по определению значения R сопротивления чувствительного к давлению резистивного элемента в точке пересечения из напряжения Vcc привода и конечного выходного напряжения Vout; и арифметическая операция по определению давления f, приложенного к точке пересечения, из значения R сопротивления чувствительного к давлению резистивного элемента на основе кривой f-R.
Список номеров ссылочных позиций
10 модуль привода,
20 модуль обнаружения напряжения,
30 модуль A/D преобразования,
40 модуль управления арифметической операцией,
50 выходной буфер,
90 модуль вывода,
100 устройство обработки сенсорного ввода,
110 устройство сенсорного ввода,
120 гибкая печатная плата,
130 контроллер устройства сенсорного ввода,
140 модуль устройства сенсорного ввода,
150 основной процессор,
160 запоминающее устройство.
Промышленная применимость
Настоящее изобретение можно использовать для технологии управления устройством сенсорного ввода.
Электронное устройство
Устройство просмотра стереоскопических видеоизображений и способ управления коэффициентом пропускания
Устройство обработки информации и устройство ввода
Система обработки информации
Устройство управления
Устройство для обработки информации, способ обработки информации, программа и носитель для хранения информации
Устройство обработки информации
Устройство управления
Механизмы обеспечения безопасности на основе камеры для пользователей установленных на голове дисплеев
Устройство управления
Электронное устройство
Устройство просмотра стереоскопических видеоизображений и способ управления коэффициентом пропускания
Устройство обработки информации и устройство ввода
Система обработки информации
Устройство управления
Устройство для обработки информации, способ обработки информации, программа и носитель для хранения информации
Устройство обработки информации

