Результат интеллектуальной деятельности: СПОСОБ КООРДИНАТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области радиоэлектроники и может быть использовано при создании средств комплексной разведки объектов.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ координатной идентификации объектов (см., например, Скрынников В.Г., Терентьев С.В. Навигационно-связной метод идентификации // Радиотехника, 1997. №7. С. 107-111), основанный на двухканальном измерении координат наблюдаемого объекта, запоминании оценок координат в первом канале, экстраполяции оценок координат в обоих каналах, причем экстраполяцию во втором канале осуществляют относительно времени экстраполяции оценок координат в первом канале, запоминании экстраполированных оценок координат, вычислении параметра идентификации и его сравнении с пороговым значением.
К основным недостаткам прототипа относится существенное снижение достоверности идентификации объектов при увеличении интенсивности потока ложных оценок координат в одном из информационных каналов (например, в первом канале), обусловленных действием на его входе неразделяемых по направлению, частоте и времени действия «мешающих» сигналов от других объектов.
Техническим результатом изобретения является повышение достоверности идентификации объектов за счет уточнения экстраполированных оценок координат в обоих каналах и параметра идентификации с использованием дополнительно определяемых вероятностей появления полезных и ложных оценок координат, а также дисперсий отклонения ложных оценок от экстраполированных оценок координат в первом информационном канале.
Указанный результат достигается тем, что в известном способе, основанном на двухканальном измерении координат наблюдаемого объекта, запоминании оценок координат в первом канале, экстраполяции оценок координат в обоих каналах, причем экстраполяцию во втором канале осуществляют относительно времени экстраполяции оценок координат в первом канале, запоминании экстраполированных оценок координат, вычислении параметра идентификации и его сравнении с пороговым значением, дополнительно определяют вероятности появления полезных и ложных оценок координат, а также дисперсии отклонения ложных оценок от экстраполированных оценок координат в первом канале, с использованием которых уточняют экстраполированные оценки координат в обоих каналах и параметр идентификации.
Сущность изобретения заключается в том, что в отличие от известного способа в предлагаемом способе дополнительно определяют вероятности появления полезных и ложных оценок координат, а также дисперсии отклонения ложных оценок от экстраполированных оценок координат в первом канале, которые используют для уточнения экстраполированных оценок координат в обоих каналах и параметра идентификации. Уточнение экстраполированных оценок координат и параметра идентификации достигается в результате весового объединения экстраполированных оценок, рассчитанных при гипотезе о появлении полезных оценок координат, с аналогичными оценками, рассчитанными при гипотезе о появлении ложных оценок координат с известными статистическими характеристиками. Это обеспечивает достижение заданного технического результата, а именно повышение достоверности идентификации объектов.
Определение вероятностей появления полезных и ложных оценок координат, а также дисперсии отклонения ложных оценок от экстраполированных оценок координат может быть выполнено, например, известным способом, приведенным в монографии «Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной разведки. 2-е изд., испр. и доп. М.: Радиотехника, 2004. 432 с.» на 314 странице.
Заявляемый способ включает в себя следующие этапы:
1. Измерение первым каналом в некоторый момент времени τv координат i-го наблюдаемого объекта. В результате формируется вектор  оценок координат, точность которых характеризуется корреляционной матрицей Dy.
оценок координат, точность которых характеризуется корреляционной матрицей Dy.
2. Измерение вторым каналом в некоторый момент времени tk координат j-го наблюдаемого объекта. В результате формируется вектор  оценок координат, точность которых характеризуется корреляционной матрицей Dz.
оценок координат, точность которых характеризуется корреляционной матрицей Dz.
3. Запоминание вектора  оценок координат i-го объекта в первом канале.
оценок координат i-го объекта в первом канале.
4. Определение вероятности Р(А) появления полезных оценок, вероятности Р(В) появления ложных оценок, а также корреляционной матрицы S отклонения ложных оценок от экстраполированных оценок координат в первом канале.
5. Экстраполяция на момент времени τv+1(τv+1≥τv и τv+1≥tk) оценок координат объектов в обоих каналах и вычисление корреляционных матриц ошибок экстраполяции в соответствии с выражениями



где  ,
,  - векторы экстраполированных оценок координат объектов в первом и втором каналах;
- векторы экстраполированных оценок координат объектов в первом и втором каналах;  ,
,  - корреляционные матрицы ошибок экстраполированных оценок координат объектов в первом и втором каналах; Н - матрица коэффициентов связей известного вида;
- корреляционные матрицы ошибок экстраполированных оценок координат объектов в первом и втором каналах; Н - матрица коэффициентов связей известного вида;  ,
,  - динамическая матрица и матрица случайных возмущений известного вида, значения элементов которых зависят от интервала времени
- динамическая матрица и матрица случайных возмущений известного вида, значения элементов которых зависят от интервала времени  ;
;  ,
,  - векторы сглаженных оценок координат объектов в первом и втором каналах, вычисляемые известным способом (см., например, Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991. С. 375);
- векторы сглаженных оценок координат объектов в первом и втором каналах, вычисляемые известным способом (см., например, Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991. С. 375);  ,
,  - корреляционные матрицы ошибок сглаженных оценок координат объектов в первом и втором каналах; т - символ транспонированной матрицы.
- корреляционные матрицы ошибок сглаженных оценок координат объектов в первом и втором каналах; т - символ транспонированной матрицы.
6. Запоминание векторов  ,
,  экстраполированных оценок и корреляционных матриц
экстраполированных оценок и корреляционных матриц  ,
,  ошибок экстраполированных оценок координат i-го объекта в первом и j-го объекта во втором каналах.
ошибок экстраполированных оценок координат i-го объекта в первом и j-го объекта во втором каналах.
7. Вычисление параметра идентификации Parv в соответствии с выражением
где  - запомненный в момент времени τn(τn≤τv) в первом канале вектор оценок координат i-го объекта;
- запомненный в момент времени τn(τn≤τv) в первом канале вектор оценок координат i-го объекта;  ,
,  ,
,  ,
,  - запомненные в первом и втором каналах векторы экстраполированных на момент времени τn оценок координат и корреляционные матрицы ошибок экстраполированных оценок координат объектов.
- запомненные в первом и втором каналах векторы экстраполированных на момент времени τn оценок координат и корреляционные матрицы ошибок экстраполированных оценок координат объектов.
8. Сравнение параметра идентификации Parv с предварительно запомненным пороговым значением  , которое вычисляется в соответствии с выражением
, которое вычисляется в соответствии с выражением


где KV{p(x|Kv);F} - квантиль плотности вероятностей p(x|Kv) случайной величины х по уровню F; F - заданная вероятность ошибки идентификации объектов первого рода; Kv=v·ny - число степеней свободы плотности вероятностей p(х|Kv); ny - размер вектора  Г(…) - гамма функция.
Г(…) - гамма функция.
В результате сравнения параметра идентификации с пороговым значением формируется решение wv об идентификации (wv=1), либо не идентификации (wv=0) i-го и j-го объектов в соответствии с выражением

Описанные этапы циклически повторяются по мере измерения информационными каналами координат i-го и j-го объектов.
Способ может быть реализован, например, с помощью устройства, первым информационным каналом которого является станция радиотехнической разведки, а вторым каналом - радиолокационная станция. Структурная схема данного устройства приведена на фигуре 1, где обозначено: 1 - приемник станции радиотехнической разведки; 2.1 и 2.2 - блоки экстраполяции координат; 3.1 и 3.2 - запоминающие устройства; 4 - синхронизатор; 5 - блок вычисления параметра идентификации; 6 - пороговое устройство; 7 - приемник радиолокационной станции.
Приемник станции радиотехнической разведки 1 предназначен для обнаружения сигналов радиоэлектронных средств, измерения их координат (дальностей и азимутов), вычисления сглаженных оценок координат радиоэлектронных средств, определения вероятностей появления полезных и ложных оценок координат, а также дисперсий отклонения ложных оценок от экстраполированных оценок координат.
Блоки экстраполяции координат 2.1 и 2.2 предназначены для вычисления экстраполированных оценок координат объектов, наблюдаемых станцией радиотехнической разведки и радиолокационной станцией соответственно, а также дисперсий ошибок экстраполированных оценок координат с использованием выражений (1)-(4).
Запоминающее устройство 3.1 предназначено для оперативного запоминания текущих оценок координат, измеряемых станцией радиотехнической разведки, экстраполированных оценок и дисперсий ошибок экстраполированных оценок координат, вычисляемых блоком экстраполяции координат 2.1, а также выдачи указанных величин в блок вычисления параметра идентификации 5, выдачи в пороговое устройство 6 пороговых значений параметра идентификации.
Запоминающее устройство 3.2 предназначено для оперативного запоминания экстраполированных оценок и дисперсий ошибок экстраполированных оценок координат, вычисляемых блоком экстраполяции координат 2.2, и их выдачи в блок вычисления параметра идентификации 5.
Синхронизатор 4 предназначен для обеспечения согласованной во времени работы элементов устройства.
Блок вычисления параметра идентификации 5 предназначен для вычисления значения параметра идентификации с использованием выражения (5).
Пороговое устройство 6 предназначено для формирования решения об идентификации объектов, наблюдаемых станцией радиотехнической разведки и радиолокационной станцией, с использованием выражения (8).
Приемник радиолокационной станции 7 предназначен для обнаружения отраженных от объектов радиолокационных сигналов, измерения координат (дальностей и азимутов) объектов и вычисления сглаженных оценок координат объектов.
Устройство работает следующим образом. В результате обработки входных радиосигналов приемник станции радиотехнической разведки 1 по сигналам синхронизатора 4 формирует текущие и сглаженные оценки координат наблюдаемого объекта, а с использованием экстраполированных оценок координат объекта, поступающих из блока экстраполяции координат 2.1, определяет вероятности появления полезных и ложных оценок координат, а также дисперсии отклонения ложных оценок от экстраполированных оценок координат объекта. С выхода приемника станции радиотехнической разведки 1 текущие и сглаженные оценки координат поступают в блок экстраполяции координат 2.1, а текущие оценки координат еще и в запоминающее устройство 3.1. Вероятности появления полезных и ложных оценок координат, дисперсии отклонения ложных оценок от экстраполированных оценок координат поступают в блоки экстраполяции координат 2.1 и 2.2, а также в блок вычисления параметра идентификации 5, где используются для уточнения экстраполированных оценок координат и параметра идентификации. Вычисленные в блоке экстраполяции координат 2.1 экстраполированные оценки координат поступают в запоминающее устройство 3.1 и в приемник станции радиотехнической разведки 1, а дисперсии ошибок экстраполированных оценок координат - в запоминающее устройство 3.1.
В результате обработки отраженных радиолокационных сигналов приемник радиолокационной станции 7 по сигналам синхронизатора 4 формирует сглаженные оценки координат наблюдаемого объекта. С выхода приемника радиолокационной станции 7 указанные сглаженные оценки координат поступают в блок экстраполяции координат 2.2, где по сигналам синхронизатора 4 с учетом различий темпов обновления информации в станции радиотехнической разведки и радиолокационной станции вычисляются экстраполированные оценки и дисперсии ошибок экстраполированных оценок координат объекта. Вычисленные величины поступают в запоминающее устройство 3.2.
По сигналам синхронизатора 4 в блок вычисления параметра идентификации 5 из запоминающих устройств 3.1 и 3.2 поступают совокупности текущих и экстраполированных оценок координат объектов, а также дисперсии ошибок экстраполированных оценок координат, запомненные на всех тактах функционирования устройства. Указанные совокупности, наряду с вероятностями появления полезных и ложных оценок координат, а также дисперсиями отклонения ложных оценок от экстраполированных оценок координат объекта, используются для вычисления параметра идентификации. С выхода блока вычисления параметра идентификации 5 значение параметра идентификации поступает в пороговое устройство 6, на второй вход которого из запоминающего устройства 3.1 поступает пороговое значение параметра идентификации. В пороговом устройстве 6 в результате сравнения указанных величин формируется решение об идентификации (не идентификации) объектов, наблюдаемых станцией радиотехнической разведки и радиолокационной станцией. На последующих тактах функционирования устройства решение об идентификации этих объектов формируется аналогичным образом.
Для определения эффективности предлагаемого способа оценивались следующие показатели:
- вероятность  ошибки идентификации объектов при использовании прототипа;
ошибки идентификации объектов при использовании прототипа;
- вероятность PE ошибки идентификации объектов при использовании предлагаемого способа;
- относительное уменьшение δРЕ вероятности ошибки идентификации объектов при использовании предлагаемого способа, рассчитываемое в соответствии с выражением
Показатели  и РЕ оценивались путем проведения статистических испытаний с использованием имитационной модели станции радиотехнической разведки, приведенной в монографии «Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной разведки. 2-е изд., испр. и доп. М.: Радиотехника, 2004. 432 с.», и имитационной модели радиолокационной станции, приведенной в учебном пособии «Авиационные радиолокационные комплексы и системы: учеб. для слушателей и курсантов ВУЗов ВВС / под ред. П.И. Дудника. М.: ВВИА им. проф. Н.Е. Жуковского, 2006. 1112 с.», при одинаковых типовых начальных условиях.
и РЕ оценивались путем проведения статистических испытаний с использованием имитационной модели станции радиотехнической разведки, приведенной в монографии «Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной разведки. 2-е изд., испр. и доп. М.: Радиотехника, 2004. 432 с.», и имитационной модели радиолокационной станции, приведенной в учебном пособии «Авиационные радиолокационные комплексы и системы: учеб. для слушателей и курсантов ВУЗов ВВС / под ред. П.И. Дудника. М.: ВВИА им. проф. Н.Е. Жуковского, 2006. 1112 с.», при одинаковых типовых начальных условиях.
На фигуре 2 приведен график зависимости величины δРЕ от числа тактов v измерения станцией радиотехнической разведки координат наблюдаемого объекта для значения интенсивности потока ложных оценок координат в станции радиотехнической разведки 0,1 с-1. Из анализа графика, приведенного на фиг. 2, видно, что применение предлагаемого способа приводит к существенному уменьшению вероятности ошибки идентификации объектов по мере увеличения числа тактов измерения станцией радиотехнической разведки координат наблюдаемого объекта. Так, например, для v>5 тактов вероятность ошибки идентификации объектов при использовании предлагаемого способа уменьшается более чем на 20%.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ координатной идентификации объектов, основанный на дополнительном определении вероятностей появления полезных и ложных оценок координат, а также дисперсии отклонения ложных оценок от экстраполированных оценок координат в первом канале, которые используют для уточнения экстраполированных оценок координат в обоих каналах и параметра идентификации.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что использование дополнительно определяемых вероятностей появления полезных и ложных оценок координат, а также дисперсий отклонения ложных оценок от экстраполированных оценок координат в первом информационном канале, повышает достоверность идентификации объектов.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области радиоэлектроники.
Способ координатной идентификации объектов, основанный на двухканальном измерении координат наблюдаемого объекта, запоминании оценок координат в первом канале, экстраполяции оценок координат в обоих каналах, причем экстраполяцию во втором канале осуществляют относительно времени экстраполяции оценок координат в первом канале, запоминании экстраполированных оценок координат, вычислении параметра идентификации и его сравнении с пороговым значением, отличающийся тем, что дополнительно определяют вероятности появления полезных и ложных оценок координат, а также дисперсии отклонения ложных оценок от экстраполированных оценок координат в первом канале, с использованием которых уточняют экстраполированные оценки координат в обоих каналах и параметр идентификации.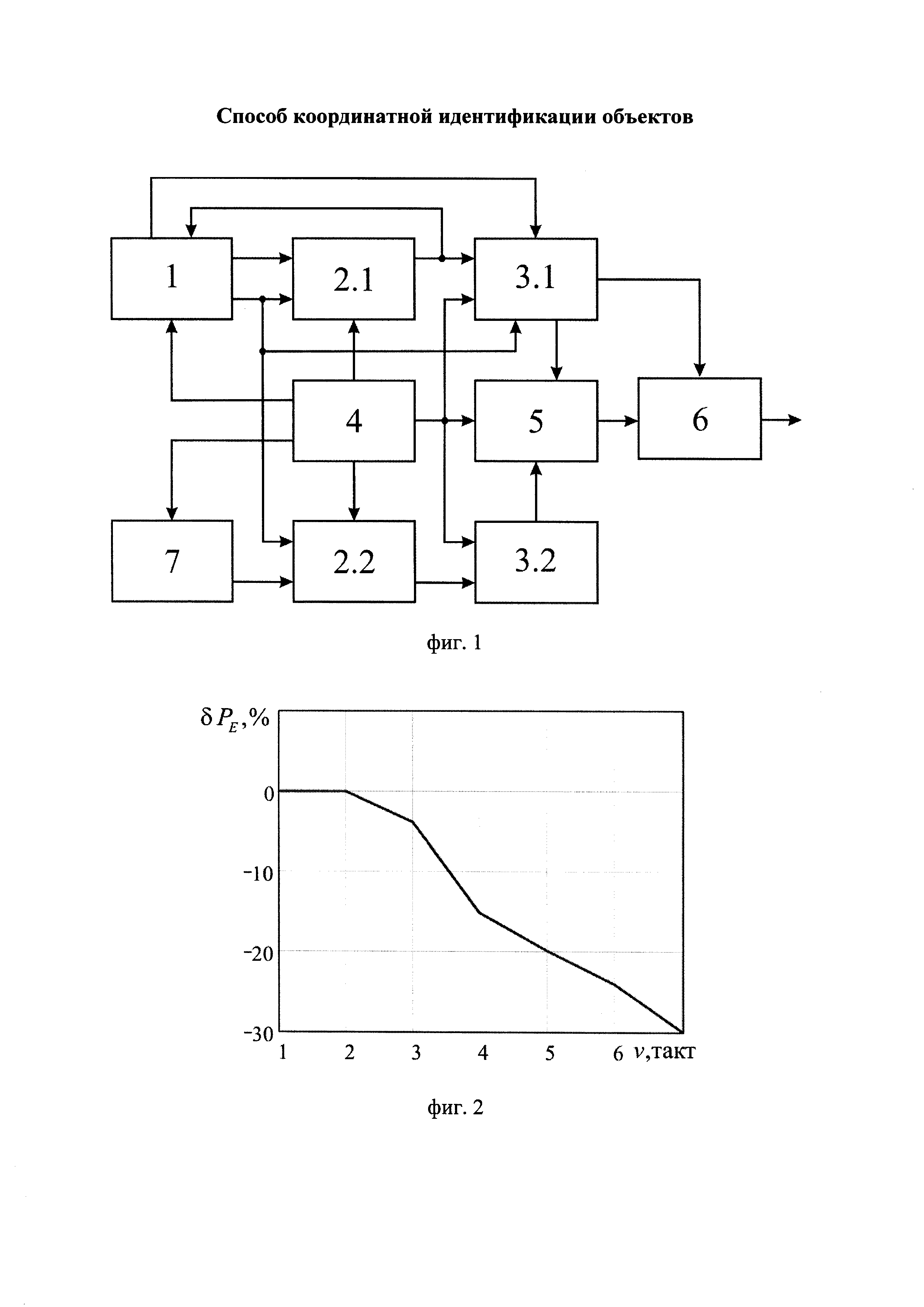
Резервуар для многокомпонентных продуктов
Устройство защиты технических объектов от механического воздействия поражающих элементов
Способ защиты приемника оптического излучения
Малогабаритный буксировщик воздушных судов с дистанционным управлением
Устройство для сжигания топлива в газотурбинном двигателе
Аппаратно-программный комплекс для макетирования и отладки цифровых устройств на базе микроконтроллеров различных архитектур
Способ прямой идентификации воздушных целей
Способ прямой идентификации воздушной цели
Способ определения координат и параметров движения источников радиоизлучений на основе анализа их взаимного расположения
Способ определения условий попадания посторонних предметов в воздухозаборник воздушного судна с турбореактивным двигателем

