СПОСОБ КАЛИБРОВКИ ИНЕРЦИОННОГО ДАТЧИКА, УСТАНОВЛЕННОГО В ПРОИЗВОЛЬНОЙ ПОЗИЦИИ НА БОРТУ ТРАНСПОРТНОГО СРЕДСТВА, И СИСТЕМА ДАТЧИКОВ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ ТРАНСПОРТНОГО СРЕДСТВА, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ УСТАНОВКИ НА БОРТУ В ПРОИЗВОЛЬНОЙ ПОЗИЦИИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается, в целом, установки и работы инерционных датчиков, таких как, например, датчики пространственного положения (гироскопы) или датчики движения (акселерометры) на борту транспортного средства.
Более конкретно, изобретение касается способа калибровки инерционного датчика пространственного положения или движения, установленного в произвольной позиции на борту транспортного средства, согласно ограничительной части пункта 1 формулы изобретения.
Изобретение также касается системы датчиков динамических параметров транспортного средства согласно ограничительной части пункта 15 формулы изобретения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Все более привычным становится использование транспортных средств, которые имеют инерционные датчики, такие как датчики пространственного положения или ускорения, установленные на борту для того, чтобы предоставлять точные указания по ориентации транспортного средства в пространстве и динамические параметры его движения. Такие устройства не только помогают в работе бортовых систем помощи при вождении, но являются необходимыми для функциональности других вспомогательных систем, включающих в себя, только в качестве одного из примеров, системы для отслеживания и записи передвижений транспортного средства, используемые в противоугонных устройствах или в устройствах, известных под термином "черный ящик", для обнаружения нарушений правил движения или динамических параметров дорожно-транспортных происшествий.
С этой целью транспортные средства могут прямо с момента производства включать в себя устройства датчиков ориентации типа, например, трехосного гироскопа и устройства датчиков движения, таких как, например, трехосный акселерометр, приспособленный точно обнаруживать и измерять пространственное положение и движение транспортного средства в трех измерениях. Если эти устройства не предусмотрены во время производства транспортного средства, они могут преимущественно быть установлены в более позднее время в качестве послепродажных установок. Как в первом, так и, главным образом, во втором случае, однако, нелегко во всех моделях транспортных средств задавать позиционные ограничения устройства датчика, так чтобы его локальные оси измерений были выровнены с основными осями транспортного средства. Ограничение установки такого устройства датчика для его правильной ориентации относительно основных осей транспортного средства потребует излишнего времени установки для точной установки и для проверки того, что ограничения и соответствие измерений соблюдаются, и в любом случае это не предотвратит возможные погрешности в конфигурации и измерении, например, что приводит к риску неправильной работой системы, которая использует данные измерений такого датчика.
По этой причине известно заранее произвольное размещение устройства датчика на борту транспортного средства в наиболее удобном месте в моторном отсеке или на приборной панели, например в наиболее легкодоступном свободном месте, и затем выполнение его калибровки относительно осей транспортного средства, вычисляющей матрицу преобразования (или матрицу преобразования координат, или даже матрицу вращения), приспособленную для того, чтобы связывать характеристики, измеренные в локальной системе координат, с требуемыми в основной системе координат транспортного средства.
WO 02/18873 описывает технологию калибровки акселерометрического датчика, установленного в произвольной позиции на борту транспортного средства, на основе непосредственного определения шести коэффициентов матрицы и вычисления оставшихся трех. Непосредственное определение шести коэффициентов матрицы имеет место посредством сравнения между соответствующими значениями ускорения, обнаруженными датчиком в локальной системе координат, и соответствующими измерениями реального ускорения, ссылающимися на систему координат транспортного средства, полученными через спутниковую систему позиционирования, интегрированную в транспортное средство. Вычисление оставшихся трех коэффициентов матрицы получается посредством математического наложения ограничений ортогональности между направлениями осей систем координат.
Недостатком является то, что этот смешанный подход, который уменьшает физические измерения до минимума и наполняется данными матрицы преобразования координат на основе чисто математических соотношений ортогональности, существующих между осями систем координат, приводит к распространению погрешностей измерения, вносимых шестью измерениями также на три элемента накопленных данных, и вызывает риск концентрации погрешности, превышающей допустимую, на одной из осей измерения, которая будет значительно компрометировать функциональность применения, которое будет основываться на данных акселерометра транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение имеет цель облегчения установки инерционного датчика, такого как датчик пространственного положения или движения, и, предпочтительно, трехосного датчика, на борту транспортного средства в соответствии с произвольной ориентацией, но делает возможным обнаружение данных пространственного положения или движения транспортного средства, которые могут быть связаны с основными осями самого транспортного средства, с тем, чтобы использоваться для существенных применений только в контексте базовой системы координат, размещенной в центре транспортного средства.
В частности, настоящее изобретение имеет цель предоставления удовлетворительного решения проблемы, кратко изложенной выше, избегая недостатков предшествующего уровня техники.
Более конкретно, настоящее изобретение имеет целью получение способа калибровки устройства инерционного датчика пространственного положения или движения, установленного на борту транспортного средства в произвольной позиции, который является настолько точным, насколько возможно, с незначительными погрешностями в определении коэффициентов матрицы преобразования координат между локальной системой координат устройства датчика и системой координат транспортного средства.
Дополнительной целью изобретения является получение способа автоматической калибровки, который требует простой реализации, минимальных вычислительных нагрузок и низкого потребления энергии, приемлемой скорости и точности выполнения.
Согласно настоящему изобретению такая цель достигается благодаря способу калибровки инерционного датчика, установленного в произвольной позиции на борту транспортного средства, имеющего отличительные признаки, упомянутые в пункте 1 формулы изобретения.
Дополнительной целью изобретения является система инерционных датчиков, выполненная с возможностью установки в произвольной позиции на борту транспортного средства, как заявлено в формуле изобретения.
Конкретные варианты осуществления формируют предмет зависимых пунктов формулы изобретения, содержимое которых должно восприниматься как неотъемлемая часть настоящего описания.
Вкратце, настоящее изобретение основывается на принципе определения пространственного положения или передвижения транспортного средства, обращаясь к системе координат транспортного средства из данных пространственного положения или движения, измеренных устройством инерционного датчика, установленного на борту транспортного средства в произвольной позиции, и, следовательно, обращаясь к собственной системе координат устройства датчика (локальной системе координат), посредством матрицы преобразования координат.
Матрица преобразования вычисляется из реальных измеренных данных характеристик, указывающих пространственное положение или перемещение транспортного средства, полученных с бортового устройства датчика, и из соответствующих реальных опорных измеренных данных динамических параметров транспортного средства, по отношению к системе координат транспортного средства, полученных другим средством калибровки детектора, например, через спутниковую систему позиционирования, интегрированную в транспортное средство.
Все коэффициенты матрицы преобразования вычисляются посредством сравнения вышеупомянутых реальных измеренных данных, посредством некоторого числа измерений независимо от характеристик, указывающих пространственное положение или перемещение транспортного средства, равного числу столбцов матрицы.
Погрешность в коэффициентах матрицы преобразования, вычисленных из реальных измеренных данных, распределяется по всем коэффициентам, накладывая ограничение ортогональности на саму матрицу, получая матрицу вращения, ближайшую к вычисленной матрице.
Предпочтительно, способ калибровки согласно изобретению использует реальные измеренные опорные данные динамических параметров транспортного средства, полученные через GPS-приемник, преимущественно после фильтрации, чтобы гарантировать оптимальные условия измерения динамического параметра и точность принятого сигнала.
Другие источники измеренных данных динамических параметров транспортного средства могут рассматриваться, для справки, как альтернатива данным GPS-приемника или другой системы позиционирования, например, датчиков угловой скорости или дифференциальных одометрических датчиков, интегрированных на борту транспортного средства для автономного измерения пройденных расстояний посредством измерений вращения колес транспортного средства.
Существенные признаки способа калибровки согласно изобретению, описанные в качестве примера со ссылкой на акселерометрический датчик, могут быть полезно применены для калибровки других типов инерционных датчиков положения в пространстве и движения, данные измерений которых должны ссылаться на одну, две или более осей транспортного средства, например трехосный гироскоп.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные характеристики и преимущества изобретения будут описаны более подробно в последующем подробном описании варианта его осуществления, приведенного в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, на которых:
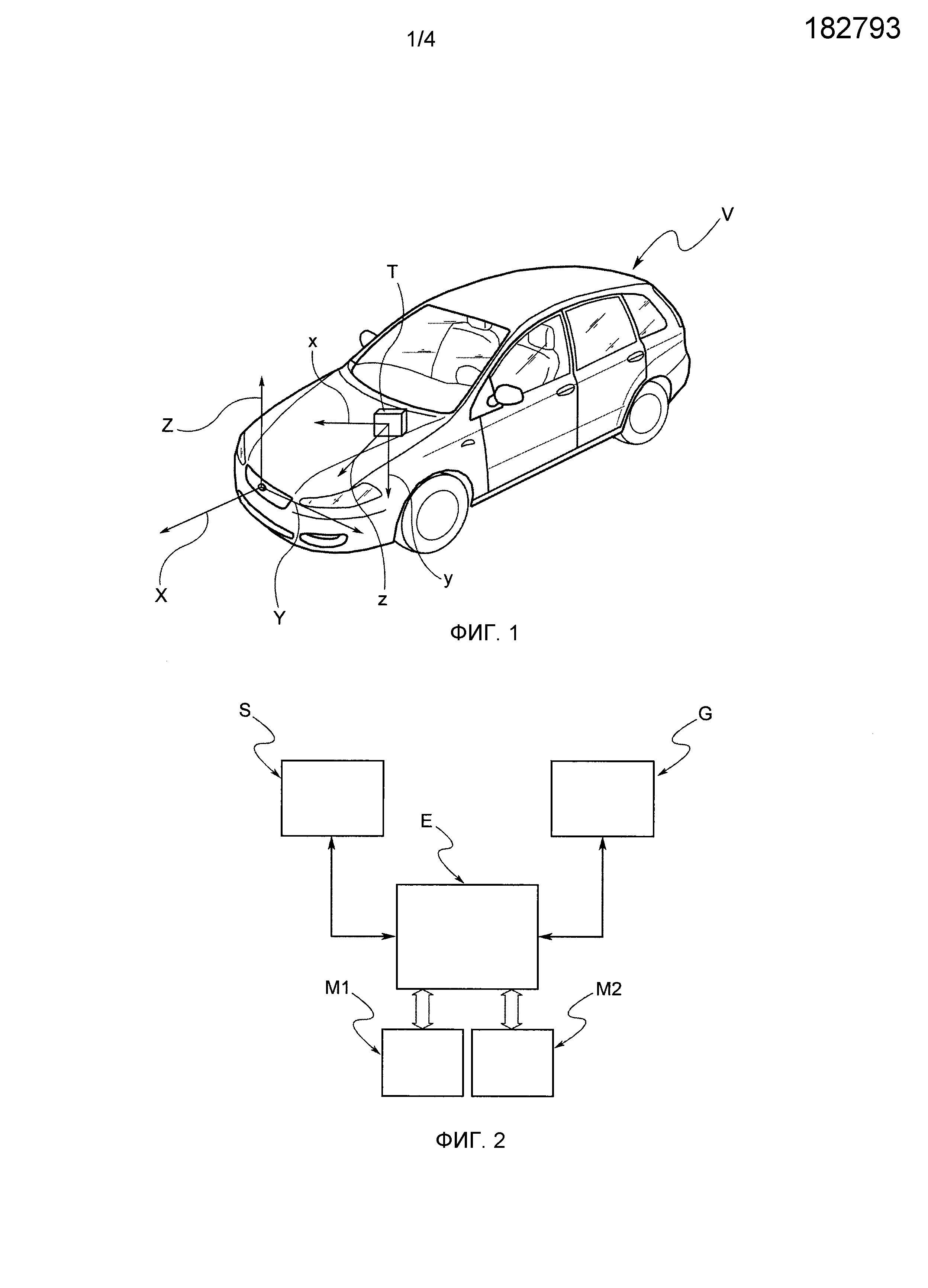
фиг. 1 - это схематическое представление транспортного средства, оборудованного акселерометрическим устройством, используемым в произвольной позиции, в котором основные оси базовой системы координат, размещенной в центре транспортного средства, и оси базовой системы координат, локальной по отношению к акселерометрическому устройству, совпадают;
фиг. 2 - это структурная схема бортового телематического блока, объединяющего акселерометрическое устройство, показанное на фиг. 1, выполненного с возможностью выполнять способ калибровки согласно изобретению;
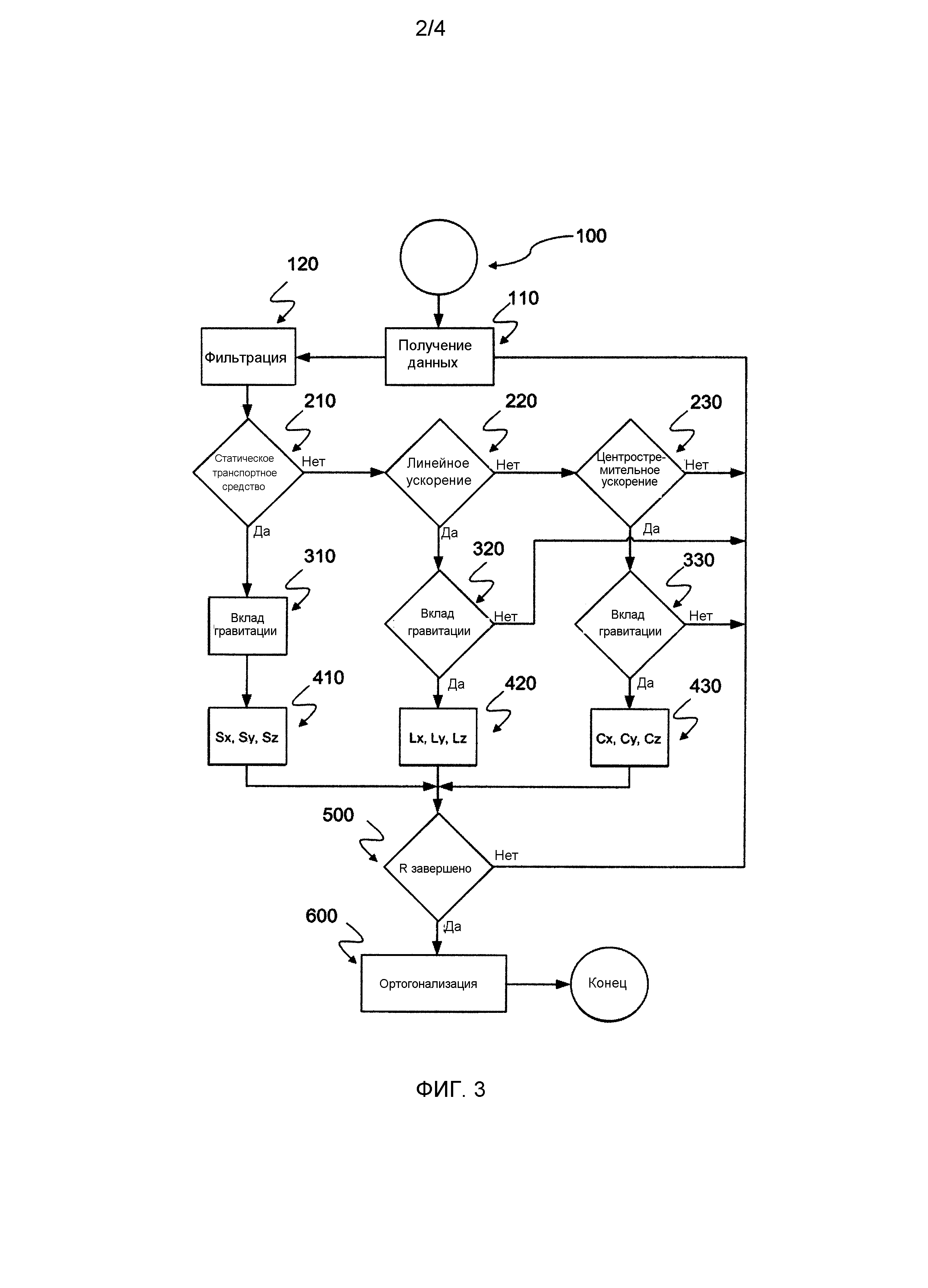
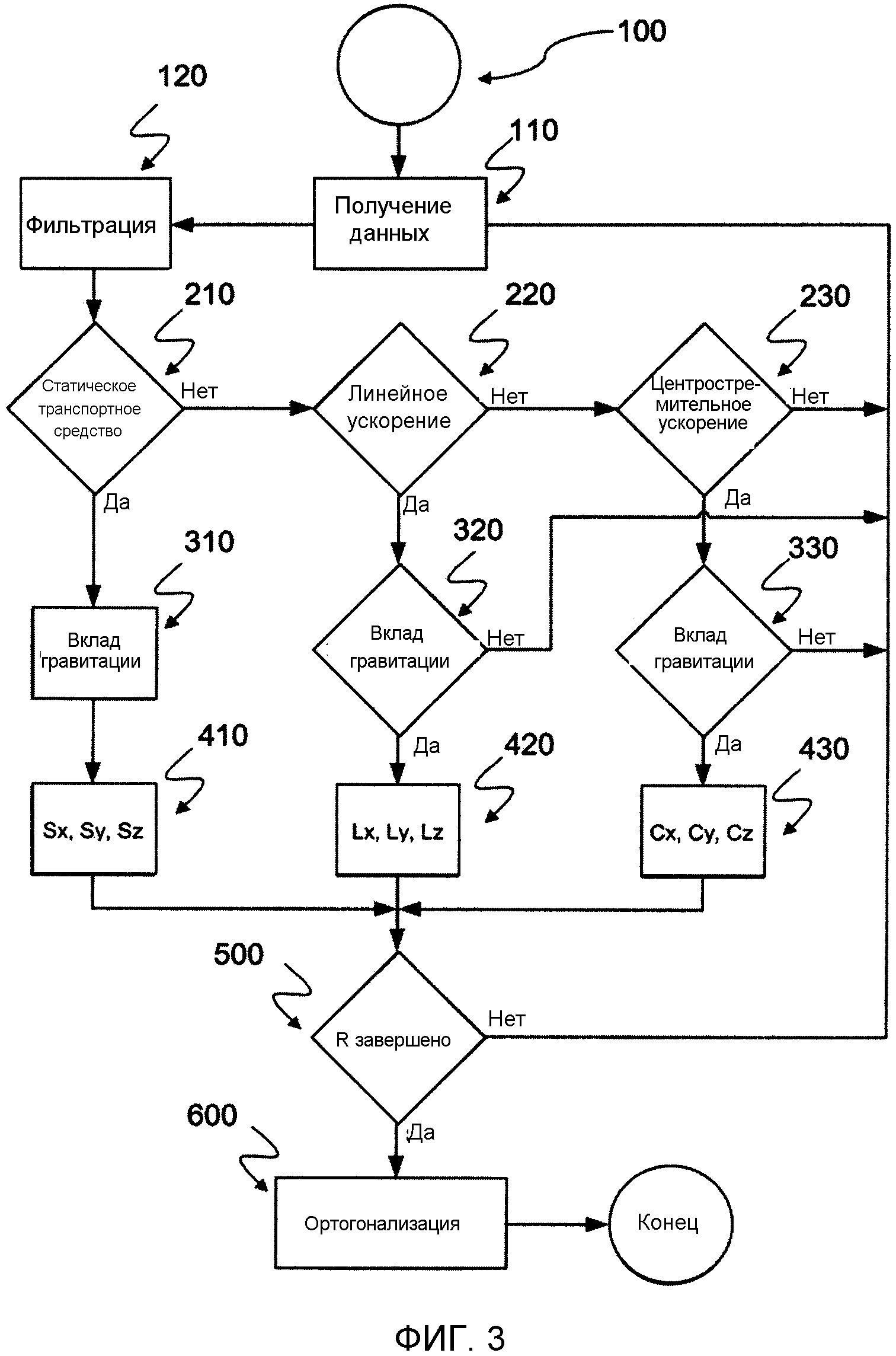
фиг. 3 - это блок-схема последовательности операций способа калибровки акселерометрического устройства, показанного на фиг. 1, согласно изобретению;
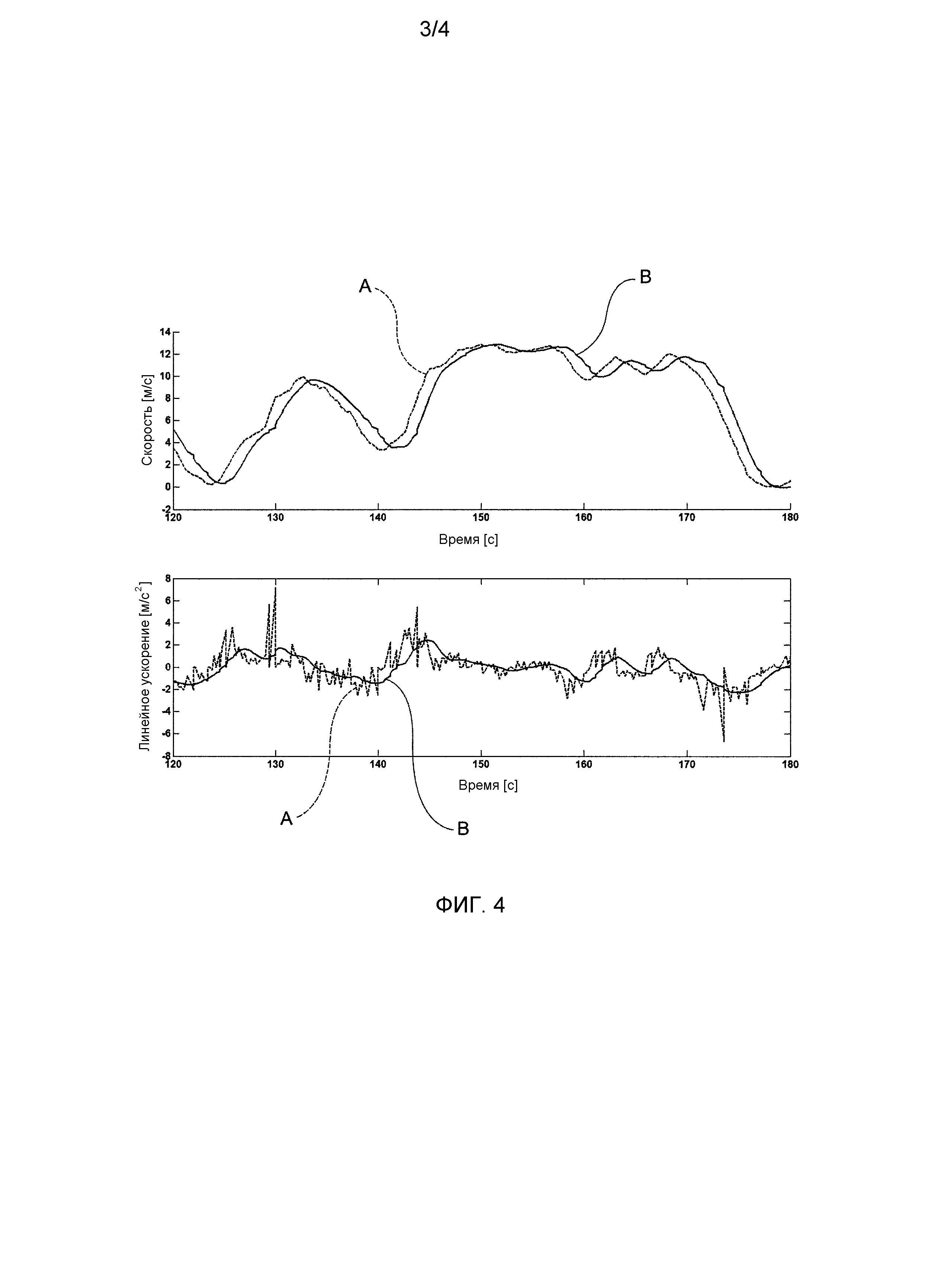
фиг. 4 показывает два графика, представляющие динамику скорости и линейного ускорения транспортного средства во времени, выведенные из данных спутникового позиционирования транспортного средства и подвергнувшиеся фильтрации; и
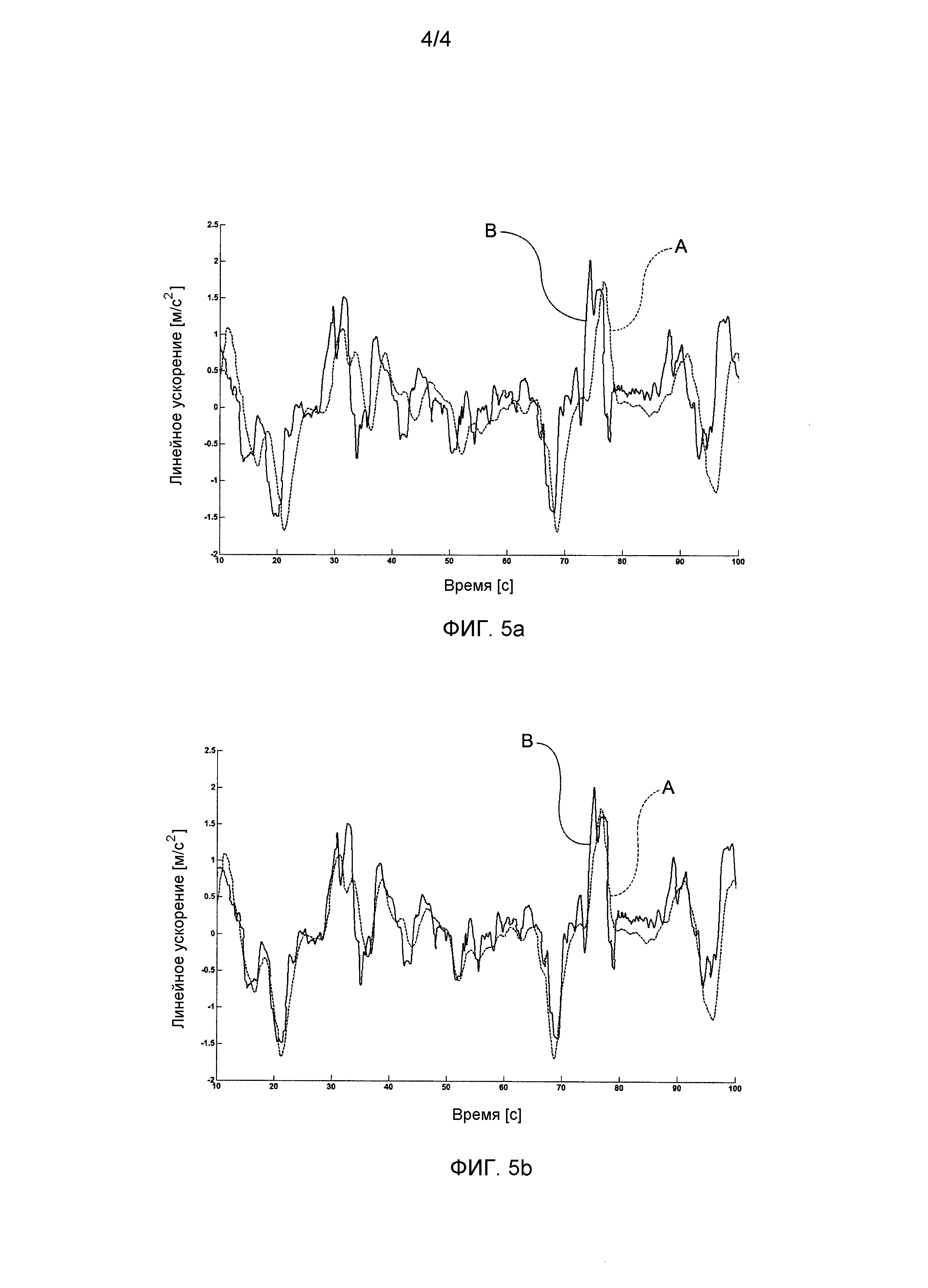
фиг. 5a и 5b показывают сравнение на временной шкале между изменением опорных данных ускорения и данных ускорения, измеренных бортовым устройством, до и после операции синхронизации соответственно.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
На фиг. 1, буква V, в общем, указывает транспортное средство, оснащенное телематическим блоком T, выполненным с возможностью обнаружения динамических режимов транспортного средства, в частности приспособленным измерять ускорения, испытываемые транспортным средством во время движения, в зависимости от различных режимов движения.
Телематический блок T содержит устройство S датчика пространственного положения или движения, такого как, например, но не исключительно, трехосное акселерометрическое устройство, установленное в произвольной позиции и приспособленное измерять линейное и центростремительное ускорения, испытываемые датчиком, в компонентах, направленных согласно локальным осям устройства, обозначенным на чертежах как x, y, z.
Кроме того, на фиг. 1, буквы X, Y, Z указывают основные оси транспортного средства, обычно идентифицируемые как продольная, поперечная и вертикальная ось, и относительно которых определяются параметры движения транспортного средства, например скорости, ускорения и углы его отклонения во всех режимах движения.
Телематический блок T может быть установлен на борту транспортного средства во время производства и связан с линией связи, интегрированной на борту, например, CAN-шиной, чтобы передавать измеренные данные другим блокам обработки транспортного средства. Альтернативно, блок устанавливается на борту транспортного средства после его производства и соединяется с другими блоками обработки через специализированную линию связи, причем не имеющую возможности осуществлять доступ к CAN-сети.
Как указано подробно в структурной схеме на фиг. 2, аналогично устройству S датчика, телематический блок содержит электронный блок E обработки, в свою очередь связанный с GPS-приемником, в целом, указанный буквой G, или эквивалентным образом с другим бортовым датчиком, приспособленным получать опорные данные динамических параметров транспортного средства, для выполнения способа калибровки, который будет описан позже в данном документе. Модули M1 и M2 памяти, типично модуль M1 оперативного запоминающего устройства для временного хранения данных и для вычислительного процесса и модуль M2 флэш-памяти для постоянного хранения данных, также связываются с блоком E обработки.
Блок E обработки - это блок вычислений, выполненный с возможностью получения данных ускорения, обнаруженных устройством S датчика в своей собственной базовой системе (x, y, z), и преобразования их в систему координат транспортного средства (X, Y, Z) посредством предварительно определенной матрицы R преобразования. Блок E преимущественно выполнен с возможностью обработки инерционных данных, относящихся к транспортному средству, т.е. идентифицирующих ориентацию транспортного средства в пространстве и его динамические параметры движения для того, чтобы получать систему помощи при вождении.
Блок E обработки также выполнен с возможностью согласно изобретению выполнения калибровки устройства S датчика, т.е. определения коэффициентов матрицы R преобразования, по меньшей мере, однократно после установки устройства или согласно предпочтительному варианту осуществления с периодическим обновлением таких коэффициентов неоднократно, например, согласно предварительно определенной регулярной частоте или в зависимости от активации системы помощи при вождении, которая использует измеренные данные.
Например, но не исключительно, телематический блок T может быть установлен на борту транспортного средства и предназначен для создания системы отслеживания и записи передвижений транспортного средства, например вспомогательной системы для противоугонного устройства или системы для обнаружения передвижений транспортного средства, принадлежащего парку, или даже системы для обнаружения нарушений правил движения или динамических параметров дорожно-транспортных происшествий.
Способ калибровки описывается подробно далее в данном документе со ссылкой на блок-схему последовательности операций на фиг. 3.
После подготовительного этапа 100 инициализации, блок E обработки на этапе 110 получает данные, указывающие динамические параметры транспортного средства, от GPS-приемника G. Такие данные, типично изменение позиционных данных транспортного средства по времени, делают возможным определение соответствующих опорных данных ускорений транспортного средства по основным осям X, Y, Z.
С помощью GPS-данных могут быть идентифицированы следующие динамические режимы транспортного средства:
(1) транспортное средство в состоянии покоя (нулевая скорость, v~=0);
(2) транспортное средство тормозит или ускоряется без изменения направления (линейное ускорение, отличное от нуля, нулевой компонент центростремительного ускорения);
(3) изменение в направлении транспортного средства, движущегося с постоянной скоростью (компонент центростремительного ускорения отличен от нуля);
(4) другое динамическое поведение, отличное от предыдущих.
Режимы (1), (2), (3) делают возможным выполнение способа калибровки и определение матрицы преобразования посредством объединения данных, измеренных акселерометрическим устройством, и опорных данных, полученных из позиционных данных, как будет упомянуто подробно в оставшейся части описании. Режим (4) не допускает калибровку, и, в таком случае, способ автоматически приостанавливается, ожидая новых пригодных данных.
Режим (1) транспортного средства в состоянии покоя может легко быть определен также на основе лишь данных бортового акселерометрического устройства посредством вычисления изменения измеренных данных ускорения и сравнения их с предварительно определенным порогом так, чтобы сделать способ калибровки более быстрым. Альтернативно, когда данные акселерометрического устройства известны в комбинации с позиционными данными, первые содействуют улучшению определения режимов транспортного средства в состоянии покоя, обнаруженных посредством вторых.
В действительности, в отношении динамических параметров транспортного средства, режим транспортного средства в состоянии покоя может рассматриваться аналогично режиму, в котором транспортное средство находится в постоянном и равномерном движении. Следовательно, режим транспортного средства в движении с постоянной скоростью и направлением может также быть использован в способе калибровки как эквивалент режиму (1), с тем чтобы увеличивать число доступных значений измерений.
Поскольку позиционные данные, например данные GPS спутникового позиционирования, не включают в себя предварительную обработку данных ускорения, необходимо получать информацию, касающуюся динамических параметров транспортного средства.
Во-первых, позиционные данные фильтруются, чтобы устранять ошибочные данные, т.е. данные, полученные приемником G в режиме позиционирования изменчивого или плохого качества. По этой причине, параметры достоверности позиционных данных сравниваются с предварительно определенными порогами, и данные отвергаются, если, по меньшей мере, один из параметров не соблюдает соответствующий порог. Пример, указывающий пороги параметров достоверности, приведен ниже:
- 3D-позиционирование
- HDOP<5
- Число спутников в пределах видимости >5
- Минимальный CN0 из 3 спутников с более сильным сигналом >35 дБГц
Когда позиционирование считается достоверным, из позиционных данных возможно определять скорость и направление движения транспортного средства.
Линейное ускорение ACCL может быть определено посредством применения известной формулы:
AccL=(V(t)-V(t-τ))/τ
где τ - это период выборки GPS.
Центростремительное ускорение Accc определяется из угловой скорости (выведенной из направления движения) и из скорости движения согласно формуле:
Accc=V*ω[m/s2]
где V - это линейная скорость, выраженная в [м/с], а ω - это угловая скорость, выраженная в [рад/с], которая выводится из направления движения (θ), предоставленного приемником G согласно соотношению:
ω=(θ(t)-θ(t-τ))/τ
где τ - это период выборки GPS.
Позиционные данные предпочтительно фильтруются на этапе 120, чтобы устранять шум, учитывая пределы динамических параметров транспортного средства. Экспериментальным путем было установлено, что фильтр, который обеспечивает правильный баланс между производительностью и сложностью (вычислительные затраты), является фильтром Баттерворта второго порядка, реализующим соотношение:
OutData(i)=Input(i)*a(1)+Input(i-1)*a(2)+
+Input(i-2)*a(3)-OutData(i-1)*b(2)+
-OutData(i-2)*b(3)
где Input и Outdata, как правило, являются входными и выходными характеристиками (в частности, Input представляет измерения V и ω, Outdata представляет значения V и ω после фильтрации), и
a(1)=0,0134, a(2)=0,0267, a(3)=0,0134
b(2)=-1,6475, b(3)=0,7009
и в случае ошибочных позиционных данных фильтр повторно инициализируется с помощью первых доступных действительных данных согласно соотношениям:
OutData(i)=Input(i);
OutData(i-1)=Input(i);
OutData(i-2)=Input(i);
Фиг. 4 показывает два графика, соответственно представляющих динамику скорости и линейного ускорения транспортного средства во времени, на которых кривая, указанная символом A, представляет динамику обнаруженной характеристики, а кривая, указанная символом B, представляет динамику характеристики после фильтрации. Преимущество фильтрации ясно при определении линейного ускорения.
В то же самое время, что и получение позиционных данных, блок E обработки на этапе 110 получает динамические параметры транспортного средства от акселерометрического устройства S, по отношению к локальным осям x, y, z.
Получение реальных данных ускорения от бортового акселерометрического устройства, по существу, быстрее, чем получение опорных данных ускорения, приблизительно на два порядка величин (например, получение данных от акселерометрического устройства происходит каждые 2,5 мс, тогда как позиционные данные доступны каждые 200 мс). По этой причине, и поскольку, вследствие этого, способ калибровки не может происходить с большей частотой, чем частота обновления позиционных данных, данные акселерометрического устройства обрабатываются заранее. Преимущественно, используя скорость дискретизации 2,5 мс, возможно накапливать четыре выборки данных каждые 10 мс и, таким образом, усреднять их значение и подвергать результат фильтрации шума, на этапе 120, согласно технологии, аналогичной описанной ранее в обработке позиционных данных. Коэффициенты фильтра Баттеруота второго порядка, реализующие соотношение:
OutData(i)=Input(i)*a(1)+Input(i-1)*a(2)+
Input(i-2)*a(3)-OutData(i-1)*b(2)+
-OutData(i-2)*b(3)
полученные экспериментальным путем для данных акселерометра, равны:
a(1)=0,0009, a(2)=0,0019, a(3)=0,0009
b(2)=-1,9112, b(3)=0,9150
где Input и Outdata, как правило, представляют входные и выходные характеристики фильтра (в частности, Input представляет измерения ускорения по трем осям (x, y, z), выданные датчиком, а Outdata представляет ускорения после фильтрации).
Наконец, данные акселерометрического устройства отбираются в течение временного периода в 200 мс, чтобы получать тот же момент времени, что и данные, выведенные из позиционных данных.
Однако, следует отметить, что каждая операция фильтрации добавляет задержку к распространению обрабатываемых данных. Например, повторное применение фильтра, описанного выше, к данным ускорения вносит задержку в распространение данных, приблизительно равную 1 секунде. После того как измеренные данные ускорения были получены от бортового акселерометрического устройства, и опорные данные ускорения были вычислены из позиционных данных, два элемента данных должны затем быть синхронизированы. Поскольку данные, выведенные из GPS-информации, являются результатом двух операций фильтрации (фильтр GPS-данных и дополнительная фильтрация), тогда как данные акселерометрического устройства получаются посредством выборки в реальном времени, синхронизации необходимо принимать во внимание задержку в доступности опорных данных вследствие задержек, вносимых фильтрами. Поскольку опорные данные необходимы, чтобы определять условия калибровки, как будет более ясно далее, реальные данные ускорения временно сохраняются в модулях буферной памяти банка M1 памяти. Глубина буфера, используемого для хранения данных, будет определять примененную задержку синхронизации.
График на фиг. 5a показывает сравнение в реальном времени на шкале времени между задержанным изменением опорных данных, выведенных из данных GPS-позиционирования (кривая, указанная символом A на чертежах), и ожидаемым изменением реальных данных ускорения (кривая, указанная символом B на чертежах).
Фиг. 5b показывает сравнительный график между изменением опорных данных, выведенных из данных GPS-позиционирования (кривая A), и изменением реальных данных ускорения (кривая B) после синхронизации через буферную память с задержкой 1000 мс (соответствующей 5 выборкам GPS-данных).
Обращаясь еще раз к схеме на фиг. 3, после того как получение реальных данных ускорения и опорных данных ускорения было выполнено, преимущественно подвергнуто фильтрации и синхронизировано, блок E обработки выполняет операции вычисления коэффициентов матрицы преобразования.
На уровне 200 текущий динамический режим транспортного средства проверяется посредством сравнения позиционных данных и опорных данных ускорения, полученных из них, с предварительно определенными пороговыми значениями. В частности, режим (1) транспортного средства в состоянии покоя определяется, если удовлетворяются следующие соотношения:
GPS Speed<TH.STATIC_SPD
abs (GPS Acc L )<TH.STATIC_ACC
т.е. если обнаруженная скорость меньше, чем первый порог скорости, а линейное ускорение по модулю меньше, чем первый порог линейного ускорения.
Предпочтительно, пороговые значения устанавливаются как следующие:
TH.STATIC_SPD=0,5 м/с
TH.STATIC_ACC=0,7 м/с 2
Режим (2) линейного ускорения определяется, если удовлетворяются следующие соотношения:
GPS Speed>TH.LINEAR_SPD
abs(GPS Acc L )>TH.LINEAR_ACC
abs(GPS Acc C /GPS Acc L )<TH.LIN_RATIO
т.е., если обнаруженная скорость больше, чем второй порог скорости, линейное ускорение, в своем абсолютном значении, больше, чем второй порог линейного ускорения, и абсолютное соотношение между центростремительным ускорением и линейным ускорением меньше, чем пороговое значение сравнения.
Предпочтительно, пороговые значения устанавливаются как следующие:
TH.LINEAR_SPD=3 м/с
TH.LINEAR_ACC=1,2 м/с 2
TH.LIN_RATIO=0,25
Режим (3) центростремительного ускорения определяется, если удовлетворяются следующие соотношения:
GPS Speed>TH.CENTR_SPD
abs(GPS Acc C )>TH.CENTR_ACC_C
abs(GPS Acc L /GPS Acc C )<TH.CENTR_RATIO
т.е., если обнаруженная скорость больше, чем третий порог скорости, центростремительное ускорение, в своем абсолютном значении, больше, чем первый порог центростремительного ускорения, и абсолютное соотношение между линейным ускорением и центростремительным ускорением меньше, чем упомянутое пороговое значение сравнения.
Предпочтительно, пороговые значения устанавливаются как следующие:
TH.CENTR_SPD=5 м/с
TH.CENTR_RATIO=0,25
TH.CENTR_ACC_C=1,3 м/с 2
Следует отметить, что для того, чтобы определять динамические режимы линейного и центростремительного ускорения транспортного средства, необходимо для последнего двигаться со скоростью, большей, чем соответствующее пороговое значение, поскольку иначе измерения скорости и направления, сделанные с помощью GPS-приемника, не будут достоверными.
Больший вклад линейного или центростремительного ускорения распознается посредством вычисления соотношения между двумя характеристиками. Пороговое значение 0,25 определяет максимальную допустимую погрешность, равную 25%, для каждого измерения.
Если режим (1) транспортного средства в состоянии покоя распознается на этапе 210 сравнения с порогом, способ переходит к этапу 310, на котором определяется вклад гравитационного ускорения устройства акселератора. Этот этап очень важен, поскольку вклад гравитационного ускорения должен быть известен для вычисления калибровки в режимах линейного и центростремительного ускорения. Следовательно, необходимо получать предварительно определенное минимальное число реально измеренных выборок данных с транспортным средством в состоянии покоя, например 50, для того чтобы иметь возможность также выполнять калибровки в режимах ускорения транспортного средства.
Если итогом проверки динамических режимов транспортного средства на этапе 200 является распознавание линейного ускорения (или замедления) на этапе 220 сравнения с порогом, способ переходит к этапу 320, на котором проверяется, было ли закончено вычисление вклада гравитационного ускорения акселерометрического устройства.
Аналогичным образом, если итогом проверки динамических режимов транспортного средства на этапе 200 является распознавание режима центростремительного ускорения (или замедления) на этапе 230 сравнения с порогом, способ переходит к этапу 330, на котором проверяется, было ли закончено вычисление вклада гравитационного ускорения акселерометрического устройства.
Как только вклад гравитационного ускорения был вычислен, в зависимости от текущего динамического режима блок E обработки на уровне 400 обновляет элементы матрицы преобразования, соотнесенные с ней.
Структура вещественной матрицы R преобразования представлена ниже:
с обозначением элементов, которые делают возможной идентификацию каждого из них в зависимости от динамического режима калибровки, во время которого она определяется (L = линейное ускорение, C = центростремительное ускорение, S = статический режим или транспортное средство в состоянии покоя), и оси локальной системы координат (x, y, z), к которой она относится.
Например, Lx - это элемент матрицы, определенный в динамическом режиме линейного ускорения транспортного средства и относительно измерения акселерометрического устройства по оси x.
Выражение преобразования между вектором ускорений, измеренным в локальной системе координат акселерометра (axs, ays, azs), и вектором ускорений в базовой системе транспортного средства (aXV, aYV, aZV) является следующим:
Предпочтительно, на каждой итерации способа калибровки значения элементов матрицы присваиваются посредством применения операции фильтрации, которая принимает во внимание множество предыдущих результатов измерений, например, согласно формуле:
Output=(Output*n step +New_Value)/(n step +1)
где Output - это общий рассматриваемый параметр, и в которой после каждой итерации счетчик nstep итераций (инициализированный в значении 0 на этапе 100) увеличивается: n step =n step +1.
Эта операция фильтрации, по мнению изобретателей, является лучшим компромиссом между производительностью, простой реализацией и низкими требованиями памяти и вычислений. Для того чтобы избегать замедления вычислений, когда число измерений увеличивается, и в то же время избегать присвоения чрезмерно низких весов новым измерениям, фильтр предпочтительно ограничивается минимальным весом, равным 1/400.
В динамическом режиме транспортного средства в состоянии покоя на этапе 410 блок обработки обновляет элементы третьего столбца матрицы Sx, Sy, Sz преобразования в зависимости от средних значений реально измеренных данных Acc_x, Acc_y, Acc_z акселерометрического устройства и значений элементов матрицы, вычисленных на предыдущей итерации, согласно соотношениям:
Sx=(Sx*n step +Acc_xS)/(n step +1)
Sy=(Sy*n step +Acc_yS)/(n step +1)
Sz=(Sz*n step +Acc_zS)/(n step +1)
где
Acc_xS=Acc_x/sqrt(Acc_x 2 +Acc_y 2 +Acc_z 2 )
Acc_yS=Acc_y/sqrt(Acc_x 2 +Acc_y 2 +Acc_z 2 )
Acc_zS=Acc_z/sqrt(Acc_x 2 +Acc_y 2 +Acc_z 2 )
и значения вкладов гравитационного ускорения:
G X =(G X *n step +Acc_x)/(n step +1)
G Y =(G Y *n step +Acc_y)/(n step +1)
G Z =(G Z *n step +Acc_z)/(n step +1)
В динамическом режиме транспортного средства, подверженного линейным ускорениям, на этапе 420 блок обработки обновляет элементы первого столбца матрицы Lx, Ly, Lz преобразования в зависимости от средних значений реально измеренных данных Acc_x, Acc_y, Acc_z акселерометрического устройства и вычисленных вкладов гравитационного ускорения согласно соотношениям:
Lx=(Lx*n step +Acc_xL)/(n step +1)
Ly=(Ly*n step +Acc_yL)/(n step +1)
Lz=(Lz*n step +Acc_zL)/(n step +1)
где:
Acc_xL=(Acc_xl/sqrt(Acc_xl 2 +Acc_yl 2 +Acc_zl 2 ))*sign (GPS_Acc)
Acc_yL=(Acc_yl/sqrt(Acc_xl 2 +Acc_yl 2 +Acc_zl 2 ))*sign (GPS_Acc)
Acc_zL=(Acc_zl/sqrt(Acc_xl 2 +Acc_yl 2 +Acc_zl 2 ))*sign (GPS_Acc)
и
Acc_xl=Acc_x-G X
Acc_yl=Acc_y-G Y
Acc_zl=Acc_z-G Z
в которых GPS_Acc - это значение линейного ускорения, выведенное из данных GPS-позиционирования.
В динамическом режиме транспортного средства, подверженного центростремительному ускорению, на этапе 430 блок обработки обновляет элементы второго столбца матрицы преобразования Cx, Cy, Cz в зависимости от средних значений реально измеренных данных Acc_x, Acc_y, Acc_z акселерометрического устройства и вычисленных вкладов гравитационного ускорения согласно соотношениям:
Cx=(Cx*n step +Acc_xC)/(n step +1)
Cy=(Cy*n step +Acc_yC)/(n step +1)
Cz=(Cz*n step +Acc_zC)/(n step +1)
где:
Acc_xC=(Acc_xc/sqrt(Acc_xc 2 +Acc_yc 2 +Acc_zc 2 ))*sign (GPS_Acc_C)
Acc_yC=(Acc_yc/sqrt(Acc_xc 2 +Acc_yc 2 +Acc_zc 2 ))*sign (GPS_Acc_C)
Acc_zC=(Acc_ZC/sqrt(Acc_xc 2 +Acc_yc 2 +Acc_zc 2 ))*sign (GPS_Acc_C)
и
Acc_xc=Acc_x-G X
Acc_yc=Acc_y-G Y
Acc_zc=Acc_z-G Z
в которых GPS_Acc_C - это значение центростремительного ускорения, выведенного из данных GPS-позиционирования.
Если способ калибровки не завершен, т.е. все элементы матрицы преобразования не были вычислены, или, иначе, если вычисление вкладов гравитационного ускорения не закончено, вследствие чего блок обработки не может продолжать вычисление элементов матрицы, соответствующих рабочим режимам, в которых транспортное средство подвергается линейному или центростремительному ускорению, существует другая итерация нового цикла получения позиционных данных, измерения данных акселерометра, синхронизации и вычисления элементов матрицы из этапов 110 и 120.
Способ калибровки считается адекватно завершенным на этапе 500, когда число выборок, рассматриваемых для каждого динамического режима, больше, чем пороговое значение, например, 300. Конечно, другой порог законченности может быть установлен. Там где пороговое значение больше, время, необходимое для выполнения калибровки, также будет более длительным, но результат будет более точным.
Когда калибровка завершена, возможно выполнять уточнение матрицы преобразования посредством выполнения снова способа калибровки и периодического обновления значений элементов матрицы.
Матрица R преобразования, полученная в конце способа калибровки на основе полученных данных, является вещественной матрицей преобразования, на элементы которых оказывают влияние погрешности измерений, вследствие чего они не удовлетворяют требованиям ортогональности векторов строк и векторов столбцов. Матрица преобразования поэтому подвергается ортогонализации на этапе 600, т.е. вычислению матрицы ортогонального вращения, ближайшей к матрице преобразования, вычисленной посредством измерений.
Вкратце, ортогональная матрица определяется как матрица, транспонирование которой эквивалентно инверсии (QTQ=QQT=I или в альтернативном обозначении QT=Q-1). Дополнительным ограничением для матрицы вращения является то, что определитель равен единице. Det(Q)=1.
Для того чтобы определять ортогональную матрицу Ro вращения, ближайшую к вычисленной реальной матрице R преобразования, применяется следующая формула:
Ro=R (RTR)(-1/2)
Ортогональная матрица преобразования, ближайшая к вышеупомянутой вычисленной вещественной матрице преобразования, преимущественно делает возможным перераспределение погрешностей измерений, которым подвергается вещественная матрица преобразования, по всей ортогональной матрице, т.е. по всем элементам матрицы вращения, и получение матрицы вращения.
Преимущественно, поскольку вычисление ортогональной матрицы является довольно трудной задачей с точки зрения вычисления для блока E обработки, оно не может выполняться для каждого периодического обновления матрицы преобразования, а только периодически, например каждые 150 обновлений.
С вычислением матрицы ортогонального вращения способ калибровки завершается, и матрица сохраняется в энергонезависимой памяти M2.
Описанный способ калибровки может выполняться только один раз, когда транспортное средство запускается, или при активации системы помощи при вождении, которая объединяет измерения акселерометра, или может выполняться циклически, после того как транспортное средство запускается или после активации системы помощи при вождении. В этом случае ожидается, что будет первый быстрый цикл грубой калибровки и последующие циклы точной калибровки.
Преимущественно, как может быть понятно из прочтения вышеизложенного описания, способ калибровки согласно изобретению ведет к формированию матрицы преобразования координат между локальной системой координат устройства датчика и базовой системой транспортного средства, в которой каждый коэффициент определяется с большей точностью относительно предшествующего уровня техники.
Конечно, без влияния на принцип изобретения варианты осуществления и детали могут широко варьироваться относительно того, что было описано и иллюстрировано исключительно в качестве неограничивающих примеров, без отступления, в виду этого, от рамок защиты изобретения, определенных прилагаемой формулой изобретения.
Механизм переключения передач с двойным сцеплением
Механизм переключения передач с двойным сцеплением

