Результат интеллектуальной деятельности: УСТАНОВКА СООТВЕТСТВИЯ ФАЗЫ АМПЛИТУДЕ/НАКЛОНУ
Вид РИД
Изобретение
Нижеследующее, в целом, относится к установке соответствия фазы амплитуде/наклону и описывается здесь с конкретным применением к циклическому сигналу, имеющему нерегулярную периодичность; здесь также рассматриваются другие применения.
При формировании изображений стробирование на основе фазы дыхания для дыхательного сигнала, которое получают одновременно со сканированием пациента, использовалось для идентификации проекционных данных, соответствующих конкретной интересующей фазе дыхания (например, полный вдох, полный выдох или где-либо в промежутке между ними) для процедур, где пациент дышит свободно, а не задерживает дыхание. При этом подходе дыхательный сигнал разделялся на индивидуальные дыхательные циклы (основываясь на максимумах и минимумах сигнала), и каждый цикл делится на фазы в диапазоне от начала цикла (0%) (например, полный вдох или выдох) до конца цикла (99%).
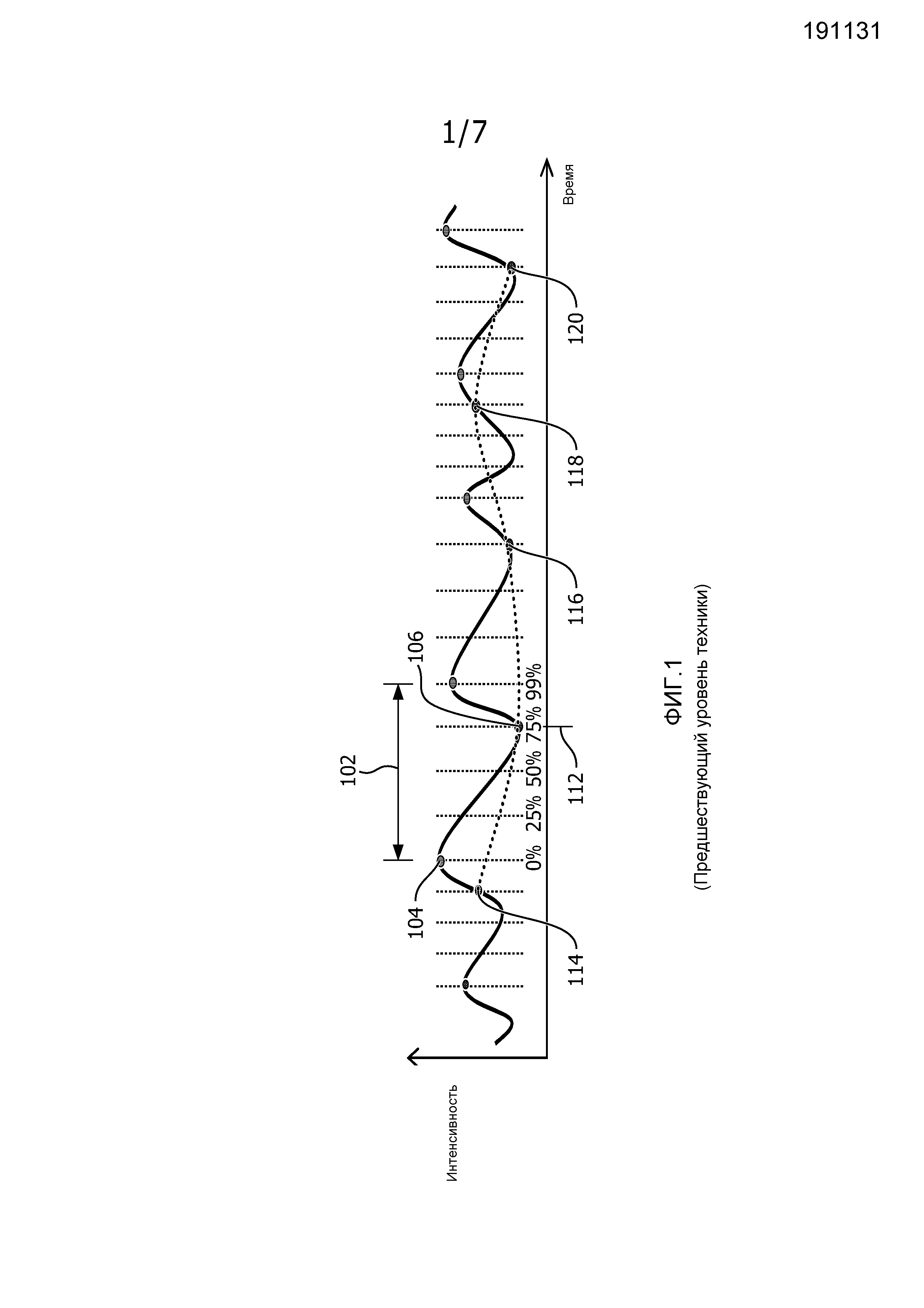
На фиг. 1 представлен пример вышесказанного. На фиг. 1 по оси Y представляется амплитуда сигнала (то есть механическое состояние легких, включая расширение и сжатие) и по оси X представляется время. В этом примере дыхательный цикл 102 определяется началом полного вдоха или расширения легких, соответствующих максимуму 104 сигнала в цикле 102. В этом примере фаза 0% присваивается максимуму 104. Остальной участок цикла 102 линейно делится на множество фаз, таких как 25%, 50%, 75% и 99% цикла 102 относительно максимума 104.
Для реконструкции набор меток времени для конкретной интересующей фазы идентифицируется на основании процента от цикла и передается на блок реконструкции, использующий метку времени (временную метку) для идентификации проекционных данных для реконструкции. Например, на фиг. 1, где интересующей фазой является фаза 75%, метка 112 времени для цикла 102 идентифицируется и передается на блок реконструктора. Для других циклов на фиг. 1 метки 112, 114, 116, 118 и 120 времени идентифицируются как соответствующие фазе 75% и передаются на блок реконструкции. К сожалению, существуют несколько проблем, связанных с этим допущением: (а) скорость выдоха обычно меньше, чем скорость вдоха, таким образом, фазы распределяются в цикле нелинейно; (b) форма дыхательного цикла может различаться от цикла к циклу (как можно видеть на фиг. 1); и (с) невозможно гарантировать, что механическое состояние (амплитуда) легких во время вдоха будет таким же, как во время выдоха. Например, на фиг. 1 метки времени, соответствующие точкам 112, 116 и 120, находятся ближе к полному выдоху или соответствуют полному выдоху, при котором легкие сжаты и амплитуда имеет минимум, тогда как метки 114 и 118 времени соответствуют механическим состояниям во время вдоха, когда легкие частично расширены и имеют большую амплитуду. Как следствие, анатомия в данных реконструированного изображения может быть не выровнена, что может вводить артефакт движения в данные реконструированного изображения.
Аспекты настоящей заявки обращены к упомянутым выше и другим проблемам.
В соответствии с одним аспектом, способ включает в себя этапы, на которых получают сигнал, включающий в себя множество циклов, и формируют соответствие, которое устанавливает соответствие фазы движения сигналу на основании амплитуды и наклона (крутизны) сигнала.
В соответствии с другим аспектом, система включает в себя процессор, идентифицирующий набор меток времени сигнала движения для множества циклов движения в сигнале движения, показывающем циклическое движение движущегося объекта, на основании предварительно определенной интересующей фазы движения и соответствия фазы амплитуде/наклону, причем набор меток времени сигнала движения соответствует обычной амплитуде сигнала.
В соответствии с другим аспектом, способ включает в себя этапы, на которых идентифицируют пик из числа множества пиков в цикле движения шумового циклического сигнала, имеющего нерегулярную периодичность, причем пик соответствует точке, лежащей между двумя точками с амплитудами ниже предварительно определенного порога, сравнивают точки перед и после пика с самим пиком и идентифицируют пик как локальный максимум, когда пик больше, чем окружающие точки.
Изобретение может принимать форму различных компонентов и компоновок компонентов, а также различных этапов и компоновок этапов. Чертежи приводятся только для целей иллюстрации предпочтительных вариантов осуществления и не должны рассматриваться как ограничение изобретения.
Фиг. 1 изображает предшествующий уровень техники.
Фиг. 2 изображает пример системы формирования изображений в сочетании с коррелятором фазы движения.
Фиг. 3 изображает пример коррелятора фазы движения.
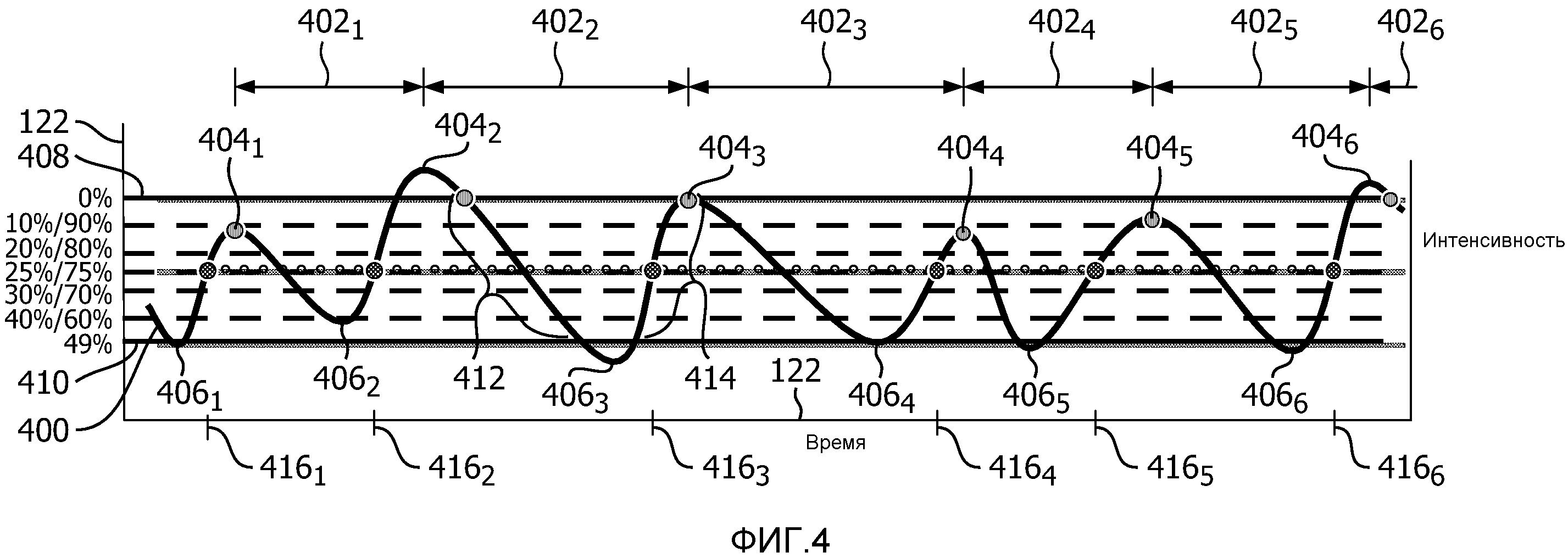
Фиг. 4 изображает пример подхода для установки соответствия фазы движения амплитуде и наклону цикла в сигнале движения.
Фиг. 5 изображает пример изображения, сгенерированного без использования коррелятора фазы движения.
Фиг. 6 изображает пример изображения, сгенерированного с помощью проекционных данных, выбранных коррелятором фазы движения.
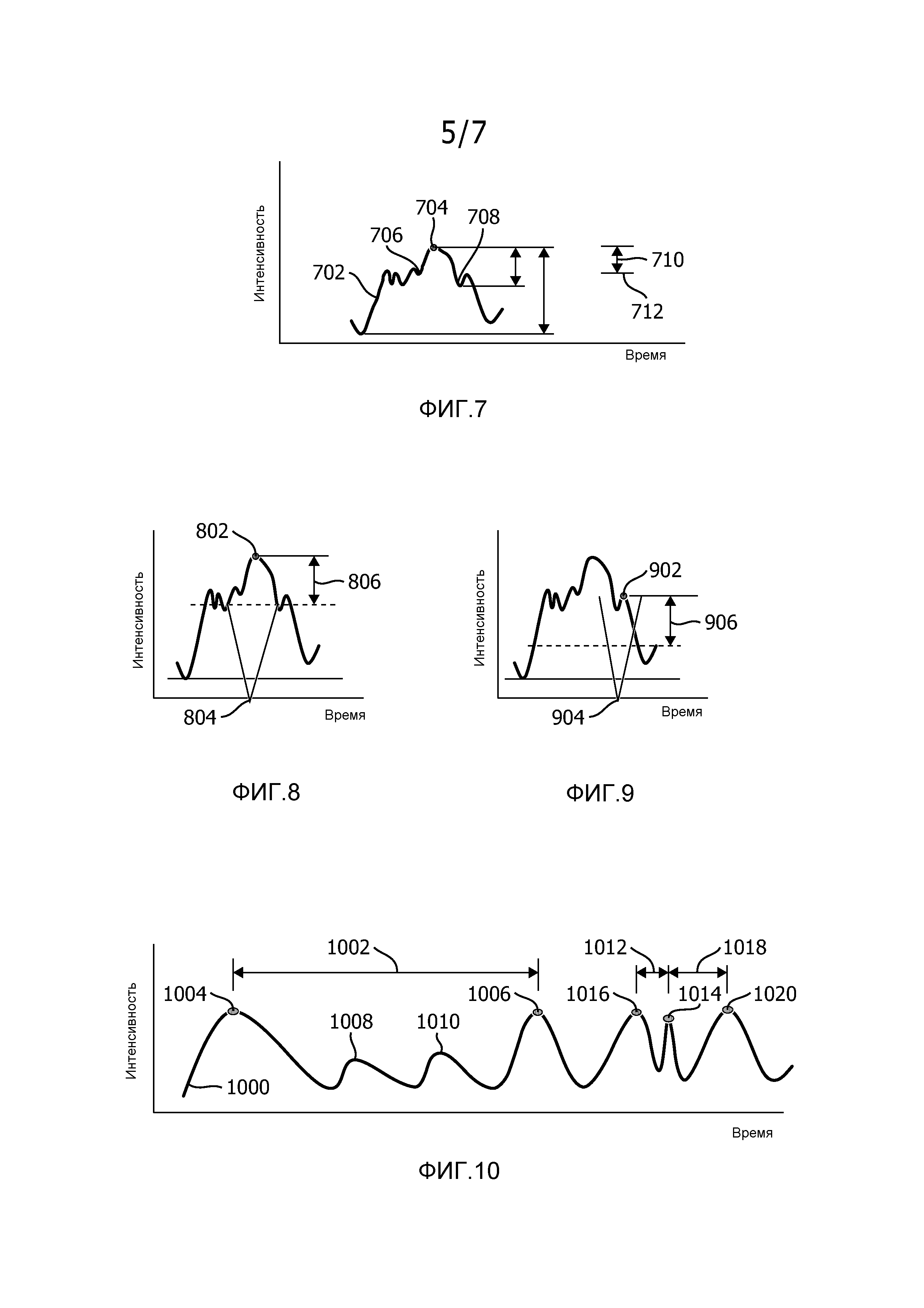
Фиг. 7 изображает пример подхода для идентификации максимумов в сигнале движения.
Фиг. 8 изображает пример подхода для идентификации локального максимума среди множества максимумов в цикле.
Фиг. 9 изображает пример подхода для исключения максимумов из числа многочисленных возможных максимумов в цикле.
Фиг. 10 изображает пример подхода для увеличения сигнала движения.
Фиг. 11 изображает пример способа идентификации проекционных данных для интересующей фазы движения для реконструкции.
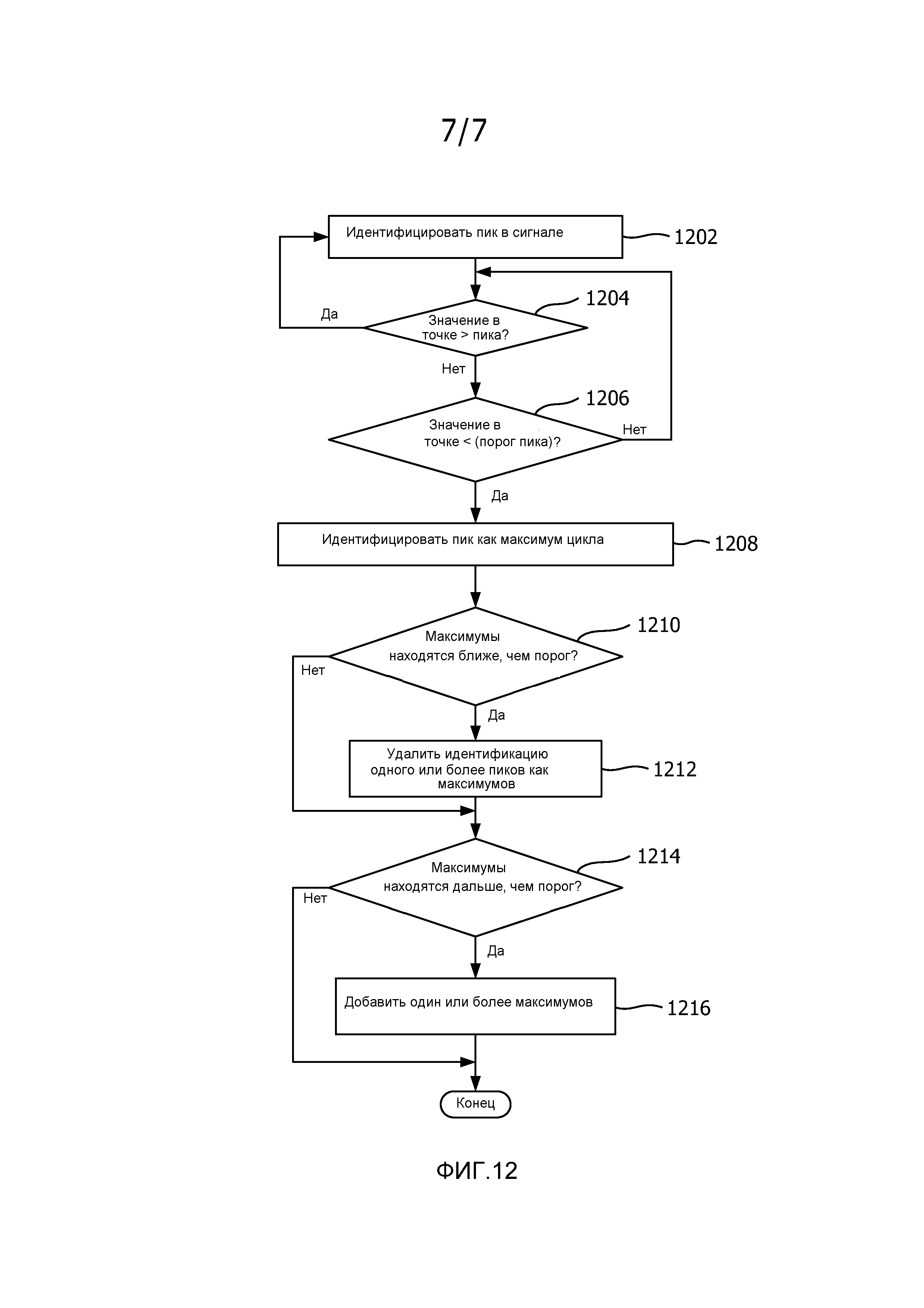
Фиг. 12 изображает пример способа определения набора локальных максимумов в сигнале.
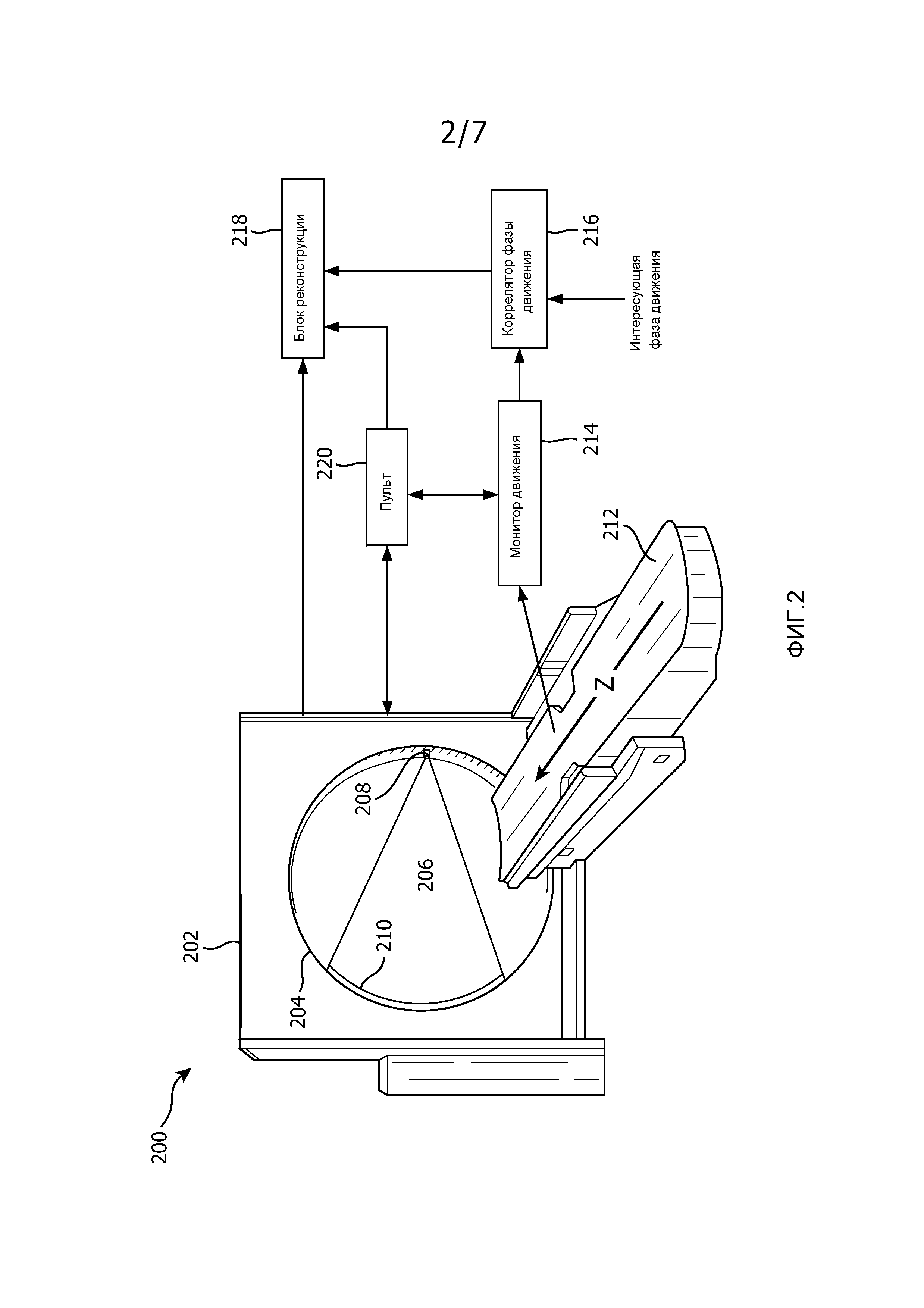
На фиг. 2 представлена система 200 формирования изображений, такая как сканер компьютерной томографии (СТ). Однако в других вариантах осуществления система 200 формирования изображений может содержать один или более других способов формирования изображений, таких как рентгеновское излучение, позитронно-эмиссионная томография (PET), однофотонная эмиссионная компьютерная томография (SPECT), магнитно-резонансная томография (MRI), ультразвук (US) и/или другие способы формирования изображений. Система 200 формирования изображений включает в себя неподвижный гентри 202 и вращающийся гентри 204, поддерживаемый неподвижным гентри 202. Вращающийся гентри 204 вращается вокруг области 206 исследования вокруг продольной оси или оси Z.
Источник 208 излучения, такой как рентгеновская трубка, поддерживается вращающимся гентри 204, вращается вместе с вращающимся гентри 204 и испускает излучение. Чувствительная к излучению матрица 210 детекторов, расположенная напротив источника 208 так, что излучение проходит через область 206 исследования, обнаруживает излучение, которое пересекает область 206 исследования, и создает проекционные данные, соответствующие обнаруженному излучению.
Опора 212, такая как кушетка, поддерживает объект или предмет в области 206 исследования. Монитор 214 движения контролирует состояние движения движущегося объекта во время сканирования и создает индицирующий его сигнал движения. Примерами движущихся объектов являются, в частности, легкое(ие) или сердце пациента или другой объект с повторяющимся регулярным или нерегулярным циклическим движением.
Коррелятор 216 фазы движения коррелирует фазы движения с метками времени при формировании изображений или получении данных сканирования. Как описано ниже более подробно, в одном случае это достигается путем коррелирования фаз движения с сигналом движения, основываясь как на амплитуде, так и на наклоне циклов в сигнале движения. Результирующая корреляция может использоваться для идентификации меток времени проекционных данных для различных циклов, которые соответствуют одной и той же фазе движения и которые имеют общую или одну и ту же механическую амплитуду или состояние. Это может облегчить смягчение артефакта движения вследствие неточного совмещения структуры в различных циклах.
Блок 218 реконструкции реконструирует проекционные данные и генерирует объемные данные изображения, индицирующие область 206 исследования. Блок 218 реконструкции сконфигурирован с возможностью выборочной реконструкции проекционных данных на основе меток времени, идентифицированных коррелятором 216 фазы движения для интересующей фазы. Блок 218 реконструкции может использовать различные алгоритмы реконструкции и проекционные данные, полученные при одиночном или многочисленных сборах данных, могут быть реконструированы, чтобы создать единое изображение.
Универсальная компьютерная система служит пультом 220 оператора, содержащим удобочитаемые для человека устройства вывода, такие как дисплей и/или принтер, и устройства ввода данных, такие как клавиатура и/или мышь. Программное обеспечение, постоянно присутствующее в пульте 220 управления, позволяет оператору управлять работой системы 200, например, позволяя оператору выбрать протокол сканирования, начать сканирование, выбрать алгоритм реконструкции (например, реконструкция со стробированием движения) и т.д.
Следует понимать, что коррелятор 216 фазы движения может быть частью системы 100, например, частью пульта 220 или чего-то другого, или может быть удаленным от системы 100, являясь, например, частью рабочих станций, распределенных по сети, и/или чем-либо другим.
Дополнительно, коррелятор 216 фазы движения может быть реализован одним или более процессорами, обрабатывающими считываемые компьютером команды, встроенные или закодированные на считываемом компьютером носителе, таком как память.
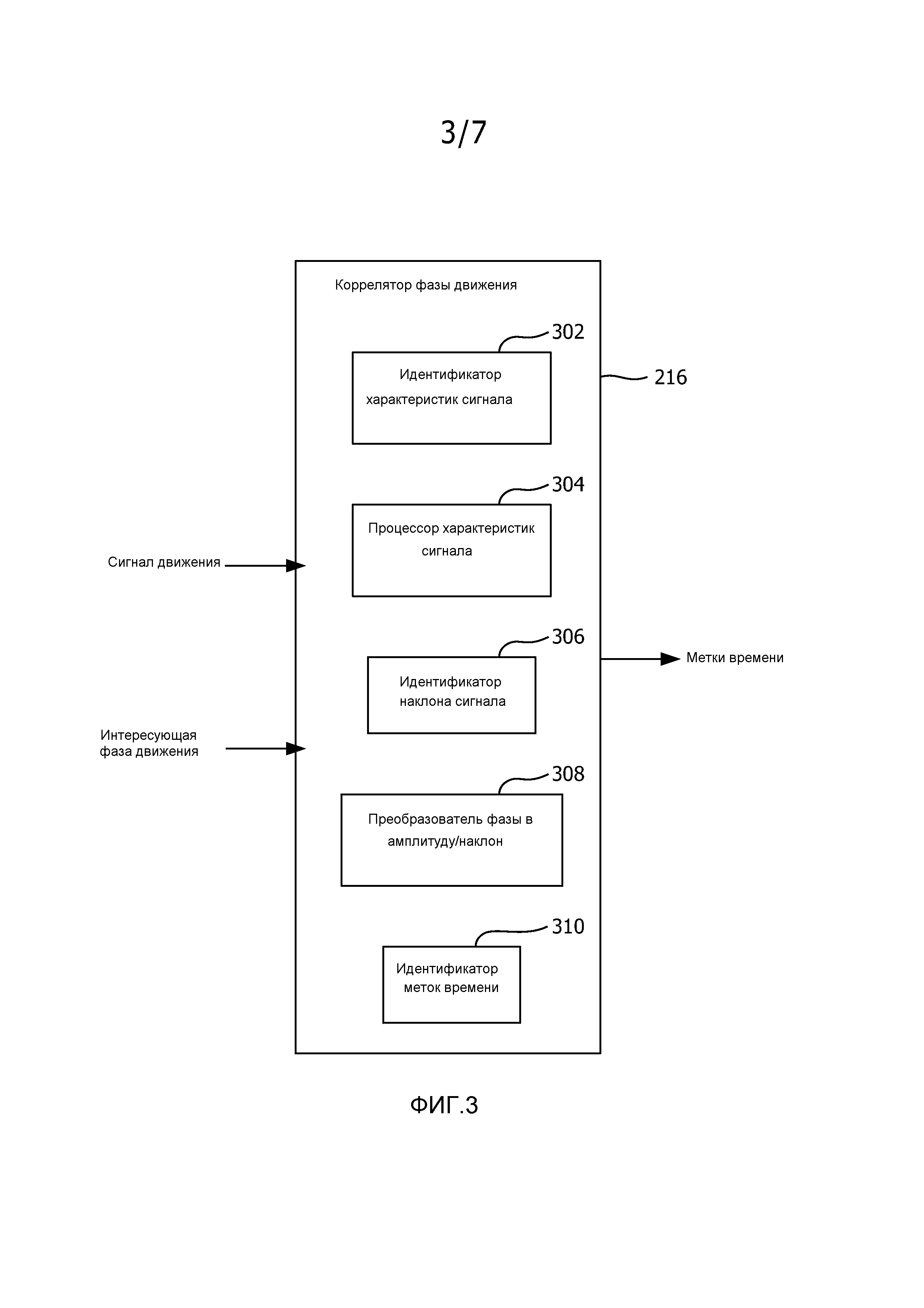
На фиг. 3 представлен пример коррелятора 216 фазы движения.
Идентификатор 302 характеристик сигнала идентифицирует одну или более характеристик сигнала движения. К этому может относиться идентификация одной или более характеристик для одного или более циклов сигнала движения. Примерами таких характеристик являются, в частности, максимумы и минимумы и/или другие точки данных.
Процессор 304 характеристик сигнала обрабатывает идентифицированную(ые) характеристику(и) сигнала. К этому может относиться определение одного или более статистических параметров (например, среднее значение, медианное значение, максимум, минимум и т.д.) и/или другая информация для идентифицированной характеристики сигнала. В одном случае статистические параметры относятся к амплитуде сигнала для одного или более циклов.
Идентификатор 306 наклона сигнала идентифицирует области уменьшения и области увеличения в циклах в сигнале движения.
Блок 308 установки соответствия фазы амплитуде/наклону устанавливает соответствие фазы движения сигналу движения, основываясь на обработанной идентифицированной характеристике сигнала и идентифицированных наклонах.
Идентификатор 310 меток времени идентифицирует метки времени в сигнале движения, которые соответствуют интересующей фазе движения и имеют схожую амплитуду сигнала, основываясь на результате установки соответствия.
Коррелятор 216 фазы движения теперь описывается совместно с обработкой циклического сигнала с нерегулярной периодичностью, такого как сигнал дыхания, полученный одновременно с формированием изображений объекта. Другие соответствующие сигналы содержат другой циклический сигнал, в том числе, в частности, шумовые циклические сигналы с нерегулярной периодичностью.
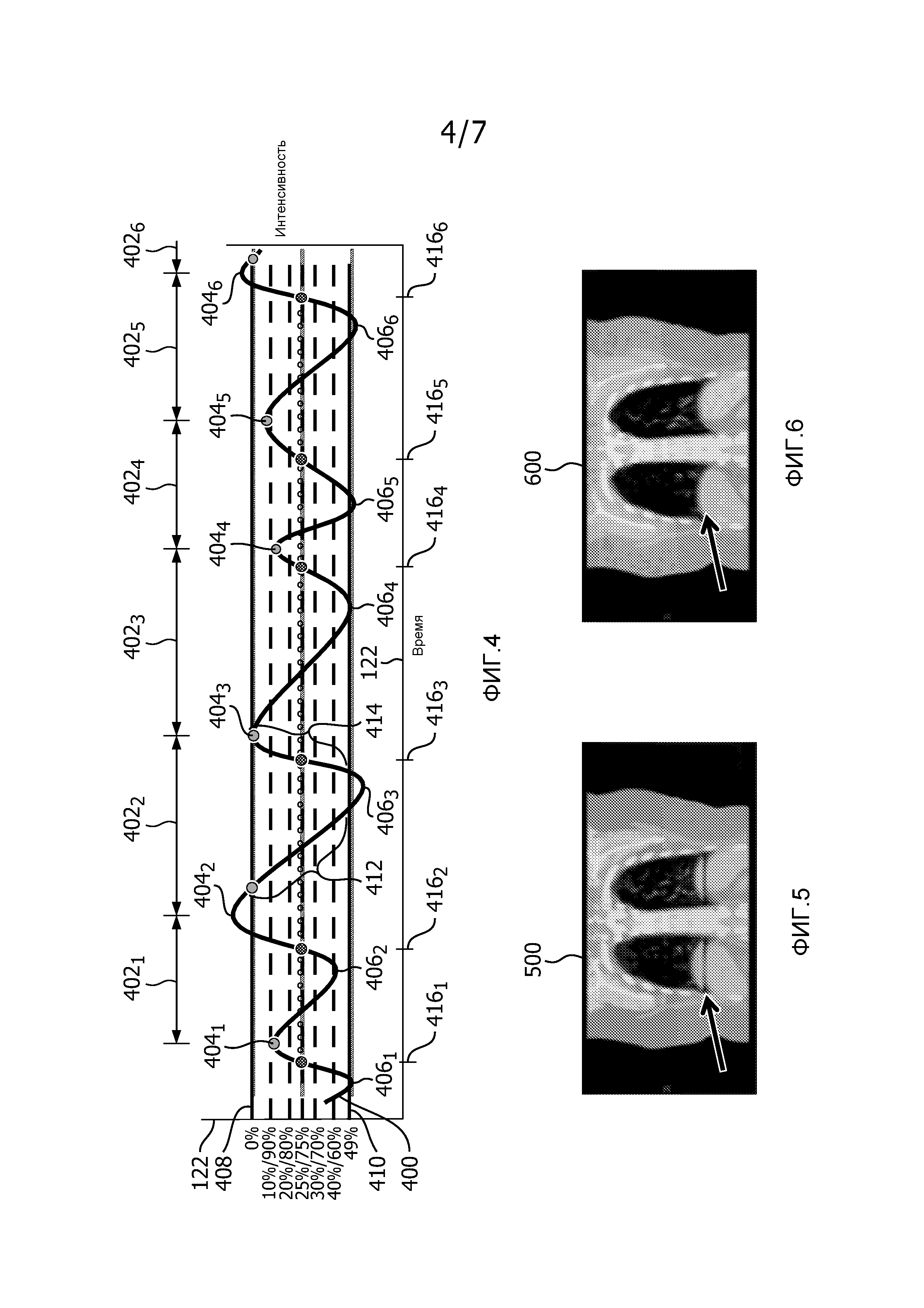
Обращаясь к фиг. 4, сигнал 400 включает в себя множество циклов 4021-4026 дыхания (вдохов и выдохов), имеющих меняющиеся амплитуды и длительности. На фиг. 4 по оси Y представляется амплитуда сигнала (механическая амплитуда), а по оси X представляется время.
Идентификатор 302 характеристик сигнала идентифицирует максимумы 4041-4046 и минимумы 4061-4066 дыхательных циклов 4021-4026 дыхательного сигнала 400. В этом примере для конкретного цикла максимум (или амплитуда максимума) соответствует полному вдоху, при котором легкие расширяются или надуваются, а минимум (или амплитуда минимума) соответствует полному выдоху, при котором легкие сжимаются или спадают.
Процессор 304 характеристик сигнала определяет средний (усредненный) максимум 408 и средний (усредненный) минимум 410, соответственно, для идентифицированных максимумов 4041-4046 и минимумов 4061-4066.
Идентификатор 306 наклона идентифицирует области уменьшения (выдоха или вдоха) и увеличения (вдоха или выдоха) или наклоны для каждого цикла, основываясь на максимумах 4041-4046 и минимумах 4061-4066. Для ясности, на фиг. 4 посредством условных обозначений идентифицируются только наклоны 412 и 414 для цикла 4022. Заметим, что на фиг. 4 скорость выдоха (наклон 412) меньше, чем скорость вдоха (наклон 414).
Блок 308 установки соответствия фазы амплитуде/наклону отображает фазы движения соответственно наклонам 412 и 414 вдоха и вдоха между средним максимумом 408 и средним минимумом 410. Например, цикл 4022 имеет длительность от максимума 4042 до следующего максимума 4043, и устанавливается соответствие фазы 0% среднему максимуму 408 и устанавливается соответствие фазы 49% среднему минимуму 410.
Выдох, который происходит между фазой 0% и фазой 49% цикла 4022, устанавливается в соответствие наклону 412 выдоха, а вдох, который происходит между фазой 49% и фазой 99% цикла 4022, устанавливается в соответствие наклону 414 вдоха. По существу, фазы для выдоха и вдоха определяются отдельно с учетом того, что средняя скорость выдоха обычно меньше, чем средняя скорость вдоха. Также гарантируется, что каждый цикл будет иметь точки данных, соответствующие фазам между 0% и 99%.
Некоторые циклы могут иметь больше, чем одну точку, которая соответствует определенной фазе. В этих случаях выбирается первая или другая возможная точка. Когда цикл (например, цикл 4021) включает в себя максимум, который меньше, чем средний максимум (например, максимум 4041), максимумом цикла считают 0%. Таким образом, на фиг. 4 установка соответствия фазы может быть должным образом масштабирована, чтобы охватывать длительность от максимума 4041 до минимума 4061.
Идентификатор 310 меток времени идентифицирует метки времени при формировании изображения или сборе данных сканирования для фаз движения. Например, на фиг. 4 идентификатор 310 меток времени используется для идентификации меток 4161-4166 времени, соответствующих фазе 25% циклов 4021-4026 движения. Конечно, метки времени, соответствующие фазам, отличным от 25%, также могут быть идентифицированы. Идентификатор 310 меток времени генерирует сигнал, индицирующий метки времени, и передает сигнал блоку 218 реконструкции (фиг. 2), который может выбрать проекционные данные для реконструкции, основываясь на нем.
Поскольку эти метки времени коррелируются, по существу, с подобной механической амплитудой движущегося объекта, структура движущегося объекта в реконструированных данных изображения будет, вероятно, хорошо совпадающей. Это можно видеть на фиг. 5 и 6.
На фиг. 5 показано изображение 500, реконструированное, когда такие метки времени не используются для выбора проекционных данных для реконструкции, и анатомическая структура в проекционных данных не соответствует или не совпадает, вводя при этом в изображение 500 артефакт 502, как показано стрелкой в изображении. Артефакт на фиг. 5 предназначен для целей объяснения, и в изображении может присутствовать артефакт, другой или отличный от показанного.
На фиг. 6 представлено изображение 600, реконструированное, основываясь на проекционных данных, соответствующих меткам времени, идентифицированным коррелятором 216 фазы движения для конкретной фазы движения. Здесь анатомическая структура в проекционных данных совпадает, и артефакт в изображении 500 отсутствует, как показано стрелкой в изображении.
Как обсуждалось выше, идентификатор 302 характеристик сигнала идентифицирует одну или более характеристик сигнала движения, таких как максимумы и минимумы для циклов в сигнале движения. Следует понимать, что сигнал движения может содержать шум, который может давать ложные максимумы и/или минимумы в сигнале и/или маскировать истинные максимумы и/или минимумы.
На фиг.7-9 представлен подход для определения максимумов и минимумов в присутствии шума. Примеры таких сигналов включают в себя дыхательные, сердечные и/или другие сигналы.
Сначала обратимся к фиг.7, где показана часть участка шумового сигнала 702. Пики или максимумы идентифицируются в сигнале 702 для предварительно определенного диапазона оценки. В показанном примере пик 704 идентифицируется как одиночная самая высокая точка между двумя точками 706 и 708, которые меньше на предварительно определенный порог 710 обнаружения. В этом примере порог 710 определяется как одна десятая (1/10) от всего динамического диапазона сигнала или разности между глобальным максимумом и глобальным минимумом. В других вариантах осуществления порог 710 может быть определен иначе.
Затем оценивается каждая точка данных сигнала 702 в диапазоне оценки. Точки данных сигнала 702 в диапазоне оценки перед точкой 704 данных ищутся до тех пор, пока точка данных не опустится ниже второго порога 712, который соответствует амплитуде от минимума до максимума, меньшего порога 710. Аналогично, точки данных сигнала 702 в диапазоне оценки после точки 704 данных ищутся, пока точка данных не опустится ниже второго порога 712. Все точки данных в диапазоне оценки затем сравниваются с точкой 704 данных.
Если пик 704 в диапазоне оценки является максимумом, он идентифицируется как локальный максимум. В противном случае, поиск продолжается со следующей точкой. Это дополнительно показано на фиг.8 и 9. На фиг.8 пик 802, идентифицированный в диапазоне 804 оценки, основываясь на пороге 806, идентифицируется как локальный максимум, поскольку он является наивысшей точкой в диапазоне 804. На фиг.9 пик 902, идентифицированный в диапазоне 904 оценки, основываясь на пороге 906, не идентифицируется как локальный максимум, поскольку он не является наивысшей точкой в диапазоне 904.
На фиг.10 показан не предназначенный для создания ограничений способ увеличения сигнала.
При этом способе, когда расстояние 1002 по времени между двумя пиками 1004 и 1006 сигнала 1000 движения превышает добавленный пиковый порог, один или более пиков 1008 и 1010 добавляются к сигналу 1000. Когда расстояние 1012 по времени между пиком 1014 и предыдущим пиком 1016 и расстояние 1018 по времени между максимумом 1014 и последующим пиком 1020 оба являются меньшими, чем выделенный порог пика, пик 1014 исключается из сигнала 1000. Пороги могут быть основаны на среднем интервале между пиками или на чем-либо ином. На фиг.11 показан способ идентификации проекционных данных для интересующей фазы движения для реконструкции.
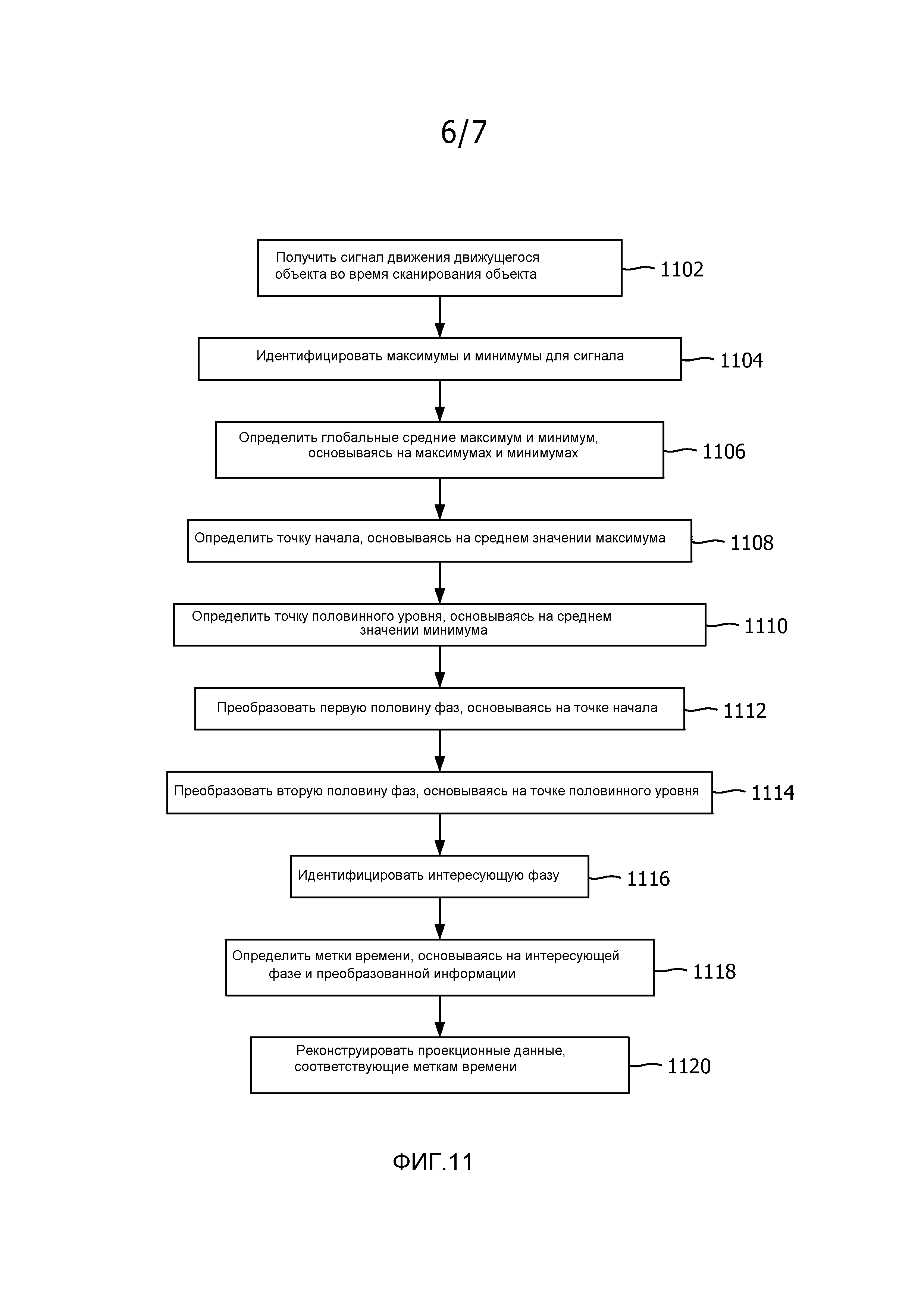
На этапе 1102 сигнал движения в настоящий момент получается во время сканирования, когда движущийся объект имеет повторяющееся циклическое движение. Движение может быть связано с дыханием, сердцебиением или другим циклическим движением.
На этапе 1104 в сигнале движения идентифицируются амплитуды максимумов и минимумов.
На этапе 1106 определяются амплитуда глобального среднего максимума и амплитуда глобального среднего минимума, основываясь на идентифицированных максимумах и минимумах.
На этапе 1108 амплитуда глобального среднего максимума используется для определения начала или точки 0% для первой области каждого цикла, длящегося от максимума цикла до минимума цикла. Там, где глобальный максимум больше, чем максимум цикла, в максимуме цикла определяются начало или точка 0%. Там, где глобальный максимум меньше, чем максимум цикла, начало или точка 0% определяются в точке, следующей после максимума цикла, амплитуда которого наилучшим образом совпадает с глобальным максимумом.
На этапе 1110 амплитуда глобального среднего минимума используется для определения точки 50% для второй области каждого цикла, длящейся от минимума цикла до максимума следующего цикла. Когда глобальный средний минимум меньше, чем минимум цикла, точка 50% определяется в минимуме цикла. Когда глобальный минимум больше, чем минимум цикла, точка 50% определяется в точке после минимума цикла, амплитуда которого наилучшим образом совпадает с глобальным минимумом.
На этапе 1112 устанавливается соответствие фазы движения от 0% до 49% первой области.
На этапе 1114 устанавливается соответствие фазы движения от 50% до 99% второй области.
На этапе 1116 идентифицируется интересующая фаза.
На этапе 1118 установка соответствия между идентифицированной фазой и амплитудами/наклонами используется для определения метки времени сканирующего сбора данных в цикле, который соответствует амплитуде, в отношении которой установлено упомянутое соответствие.
На этапе 1120 проекционные данные, собранные в идентифицированных метках времени, реконструируются в объем изображения.
На фиг. 12 представлен способ определения максимума сигнала.
На этапе 1202 пик определяется как первая точка, амплитуда в которой больше, чем амплитуда в любой предыдущей точке до максимума в предыдущем цикле, на предварительно определенный порог.
На этапе 1204 определяется, превышает ли пик значение в точке, следующей за пиком.
Если да, то этап 1202 повторяется для следующей точки.
В противном случае, на этапе 1206 определяется, является ли значение в точке после пика меньшим, чем пик, на предварительно определенный порог.
Если да, то тогда на этапе 1208 пик идентифицируется как максимум цикла.
В противном случае, этап 1204 повторяется для следующей точки.
На этапе 1210 определяется, располагаются ли максимумы ближе друг к другу, чем предварительно определенный порог.
Если да, то тогда на этапе 1212 один или более из этих максимумов перестают идентифицироваться (удаляются) как максимумы. В одном не создающем ограничений варианте осуществления вычисляется среднее значение и стандартное отклонение для интервала между максимумами, и один или более максимумов, которые ближе друг к другу, чем среднее значение - x*стандартное отклонение (где x - входной параметр), перестают идентифицироваться как максимумы.
Если да или если нет, то тогда на этапе 1214 определяется, находятся ли максимумы дальше, чем предварительно определенный порог.
Если да, то тогда на этапе 1216 добавляются один или более из этих максимумов. В этом не создающем ограничений варианте осуществления вычисляется среднее значение и стандартное отклонение интервала между максимумами, и если один или более максимумов находятся дальше, чем среднее значение+x*стандартное отклонение (где x - входной параметр), то тогда один или более максимумов добавляются между ограничивающими пиками, используя этапы 1202-1208, на которых порог классификации итеративно уменьшается, пока не будут идентифицированы соответствующие максимумы.
Упомянутые выше действия могут реализовываться посредством считываемых компьютером команд, которые, когда выполняются процессором(ами) компьютера, заставляют процессор(ы) совершать описанные здесь действия. В таком случае команды хранятся на считываемом компьютером носителе, таком как память, связанная с соответствующим компьютером и/или как-либо иначе доступная для соответствующего компьютера.
Хотя вышесказанное обсуждалось в контексте компьютерной томографии и дыхательных сигналов, следует понимать, что раскрытый здесь подход может использоваться для идентификации по существу эквивалентных точек данных в другом шумовом циклическом сигнале с нерегулярной периодичностью.
Изобретение было описано со ссылкой на предпочтительные варианты осуществления. После прочтения и понимания предшествующего подробного описания в голову могут прийти различные модификации и изменения. Подразумевается, что изобретение должно истолковываться содержащим все такие модификации и изменения, насколько они попадают в пределы объема приложенной формулы изобретения или ее эквивалентов.
Автоматическая трехмерная сегментация изображения сердца по короткой оси, полученного методом магнитно-резонансной томографии с отложенным контрастированием
Способ и система для кодирования сигнала трехмерного видео, кодер для кодирования сигнала трехмерного видео, кодированный сигнал трехмерного видео, способ и система для декодирования сигнала трехмерного видео, декодер для декодирования сигнала трехмерного видео
Светоизлучающее устройство с покрытием и способ нанесения покрытия на него
Сид-модуль
Управление энергопотреблением принимающего модуля
Устройство и способ разматывания и сматывания шнура электропитания
Способ определения уровня жидкости в бойлере
Светодиодный (сид) источник света, подобный gls
Устройство и способ управления цифровыми правами
Сид с управляемой угловой неравномерностью

