Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ЕГО ШУМОИЗЛУЧЕНИЮ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для измерения параметров движения объектов.
Известны методы измерения радиальной скорости цели при использовании излучения тонального сигнала и измерении смещения спектра принятого эхосигнала, величина которого пропорциональна радиальной скорости цели в соответствии с эффектом Доплера. (Дж Хортон. Основы гидролокации. Л.: Судостроение. 1961 г., стр. 450). Этот способ нельзя использовать для определения радиальной скорости объекта по его шумоизлучению.
Известны способы, в которых измеряют расстояние в пассивном режиме при многолучевом распространении и, казалось бы, можно измерить радиальную скорость по изменению дистанции (B.C. Бурдик. Анализ гидроакустических систем. Л.: Судостроение,. 1988 г, стр. 377).
Однако, как указывается там же, сложность оценки лучевой структуры делает способ пассивного измерения дистанции практически невыполнимым.
Известен способ «Определения радиальной скорости объекта» по патенту РФ №2191405. В соответствии с этим способом принимают сигнал двумя разнесенными в пространстве антеннами в дальнем поле шумящего объекта, дискретизацию принятого входного сигнала с интервалом дискретизации D, измеряют взаимный спектра между сигналами, принятыми этими антеннами в моменты времени t1 и t2 на основе быстрого преобразования Фурье и получение автокорреляционной функции на основе обратного преобразования Фурье измеренных взаимных спектров в моменты времени t1 и t2, измеряют периоды средних частот заполнения несущей автокорреляционной функции Τ1 и Т2 в моменты времени t1 и t2, измеряют величину изменения периода ΔΤ=Τ1-Т2 за время Δt=t1-t2, при том, что Δt больше времени измерения периода взаимного спектра, а в качестве параметра шумящего объекта выбирают его радиальную скорость, которую вычисляют по формуле Vp=KvΔT, где Kv - коэффициент пропорциональности, определяемый экспериментально в полосе обработки принятого сигнала, причем направление вектора скорости определяют по знаку ΔΤ.
Недостатком этого способа является необходимость использования двух разнесенных в пространстве антенн и низкая точность измерения периода. Низкая точность измерения периода объясняется тем, что используется вторичный спектр с выхода измерителя спектра. Если ширина спектра входного сигнала узкая, то еще можно оценить период по измеренной частоте вторичного спектра. Если ширина спектра большая, основной максимум вторичного спектра является функцией короткой длительности и определить период затруднительно.
Техническим результатом от использования предлагаемого технического решения является обеспечение автоматического измерения радиальной скорости при работе с одной антенной и повышение точности измерения периода несущей частоты автокорреляционной функции, и как следствие, повышение точности определения радиальной скорости.
Указанный технический результат достигается тем, что в способ, содержащий прием сигнала шумоизлучения объекта, дискретизацию принятого входного сигнала с интервалом дискретизации D, спектральный анализ принятого сигнала на основе быстрого преобразования Фурье и получение автокорреляционной функции на основе обратного преобразования Фурье, измерение периода несущей частоты автокорреляционной функции и измерение радиальной скорости с учетом Kv - коэффициента пропорциональности, определяемого экспериментально в полосе обработки принятого сигнала, введены новые операции, а именно: прием сигнала осуществляют одной антенной, взаимный спектр определяют между двумя последовательными временными наборами, а автокорреляционную функцию измеряют от измеренного взаимного спектра, определяют зону положительных отсчетов максимума автокорреляционной функции, определяют зону отрицательных отсчетов до начала зоны положительных отсчетов и зону отрицательных отсчетов после зоны положительных отсчетов, определяют граничные отсчеты, имеющие разную полярность, измеряют амплитуду A1 отсчета, имеющего отрицательную полярность, измеряют значение времени этого отсчета t1, измеряют амплитуду отсчета А2, имеющего положительную полярность, следующую за отрицательным отсчетом, измеряют значение времени, принадлежащего этому отсчету t2, вычисляют значение времени нулевой амплитуды сигнала несущей автокорреляционной функцию по формуле Τ1=A2D/(Α1+А2), измеряют амплитуду А3 отсчета, имеющую отрицательную полярность, из зоны, следующей за положительной зоной, измеряют значение времени этого отсчета t3, измеряют амплитуда отсчета А4, имеющего положительную полярность, предшествующего отрицательному отсчету, измеряют значение времени, принадлежащее этому отсчету t4, вычисляют временное положение нулевой амплитуды сигнала несущей автокорреляционной функции по формуле Т2=A3D/(А3+А4), вычисляют полупериод несущей частоты автокорреляционной функции по формуле П1=Т2-T1, повторяют процедуру измерения полупериода несущей частоты автокорреляционной функции для взаимных спектров между N очередными последовательными временными реализациями, вычисляют полупериод несущей частоты очередной автокорреляционной функции ПN, определяют разность между измерениями полупериодов ПN-П1, если разность положительная, то объект удаляется, если разность отрицательная, то объект приближается, а радиальную скорость объекта определяют по формуле Vr=Kv(ПN-П1).
Сущность предлагаемого технического решения заключается в следующем. Автокорреляционная функция (АКФ), определяемая как спектр от спектра (Л. Рабинер, Б. Гоулд. Теория и применение цифровой обработки сигналов. - М.: Мир, 1878 г., стр. 441), является кратковременной функцией, длительность которой определяется шириной полосы спектра шумоизлучения объекта. Известно, что ширина спектра однозначным соотношением связана с автокорреляционной функцией, ширина АКФ обратно пропорциональна ширине спектра. (Дж. Бендат, А. Пирсол. Применения корреляционного и спектрального анализа. Пер. с англ. - М.: Мир, 1983, с 71).
Пусть с выхода антенны поступают временные реализации сигналов X1(t) и X2(t).
Спектр по каждому процессу определяться через быстрое преобразование Фурье:

а взаимный энергетический спектр 
Если считать автокорреляционную функцию как преобразование Фурье от взаимного энергетического спектра, то  и тогда АКФ будет выражаться как
и тогда АКФ будет выражаться как

Таким образом, автокорреляционная функция содержат две составляющие, одна из которых определяется полосой сигнала шумоизлучения  а другая составляющая - средней частотой сигнала шумоизлучения
а другая составляющая - средней частотой сигнала шумоизлучения 
Составляющая, определяемая шириной полосы, является огибающей функции В(τ), а составляющая, определяемая средней частотой, является несущей частотой АКФ. Та и другая определяются в процессе измерений. При движении шумящего объекта, ширина полосы его шумоизлучения изменяется в зависимости от пройденного расстояния. При увеличении расстояния верхняя частота принимаемого сигнала шумоизлучения будет снижаться быстрее, чем нижняя частота. (В.Н. Матвиенко, Ю.Ф. Тарасюк. Дальность действия гидроакустических средств. - Л.: Судостроение, 1981 г., стр. 36). В момент времени первого и второго наборов временной реализации, которые соответствует началу измерения, имеем  . В момент времени, который соответствует для N-го набора временной реализации tN и tN+1, имеем
. В момент времени, который соответствует для N-го набора временной реализации tN и tN+1, имеем . Тогда для начального набора временной реализации период будет равен
. Тогда для начального набора временной реализации период будет равен  , а для N-го набора временной реализации tN и tN+1 →
, а для N-го набора временной реализации tN и tN+1 → 
Измерить само значение частоты автокорреляционной функции с помощью процедуры БПФ представляет значительные трудности, поскольку длительность автокорреляционной функции мала, а разрешающая способность процедуры БПФ определяется длительностью временной реализации входного процесса, поэтому для широкополосных шумовых сигналов точность измерения частоты и соответственно периода будет низкой. Предлагается измерить не саму несущую частоту автокорреляционной функции, а длительность полупериода несущей автокорреляционной функции и по изменении этого периода за фиксированное время рассчитывать радиальную скорость.
На фиг. 2 представлена процедура измерения полупериода несущей частоты АКФ.
Несущая частота АКФ является периодической функцией времени, которая имеет четко выраженный максимум положительных отсчетов и симметрично уменьшающихся периодов отрицательных и положительных отсчетов. Эти отсчеты расположены равномерно по оси времени через фиксированный интервал, который определяется частотой дискретизации входного процесса. Для вычисления периода несущей частоты выбирается отсчеты основного положительного максимума и двух симметрично расположенных отрицательных максимумов. По измеренным значениям A1, t1, А2, t2, A3, t3, A4, t4 производится вычисление временных положений Τ1 и Т2, которые определяют время перехода несущей частоты через нуль. Этот временной интервал и является положительным полупериодом несущей частоты автокорреляционной функции. В зависимости от изменения расстояния ширина полосы шумоизлучения объекта будет изменяться, что изменит полупериод автокорреляционной функции, а величина изменения полупериода за фиксированное время и определяет радиальную скорость движения источника шумоизлучения.
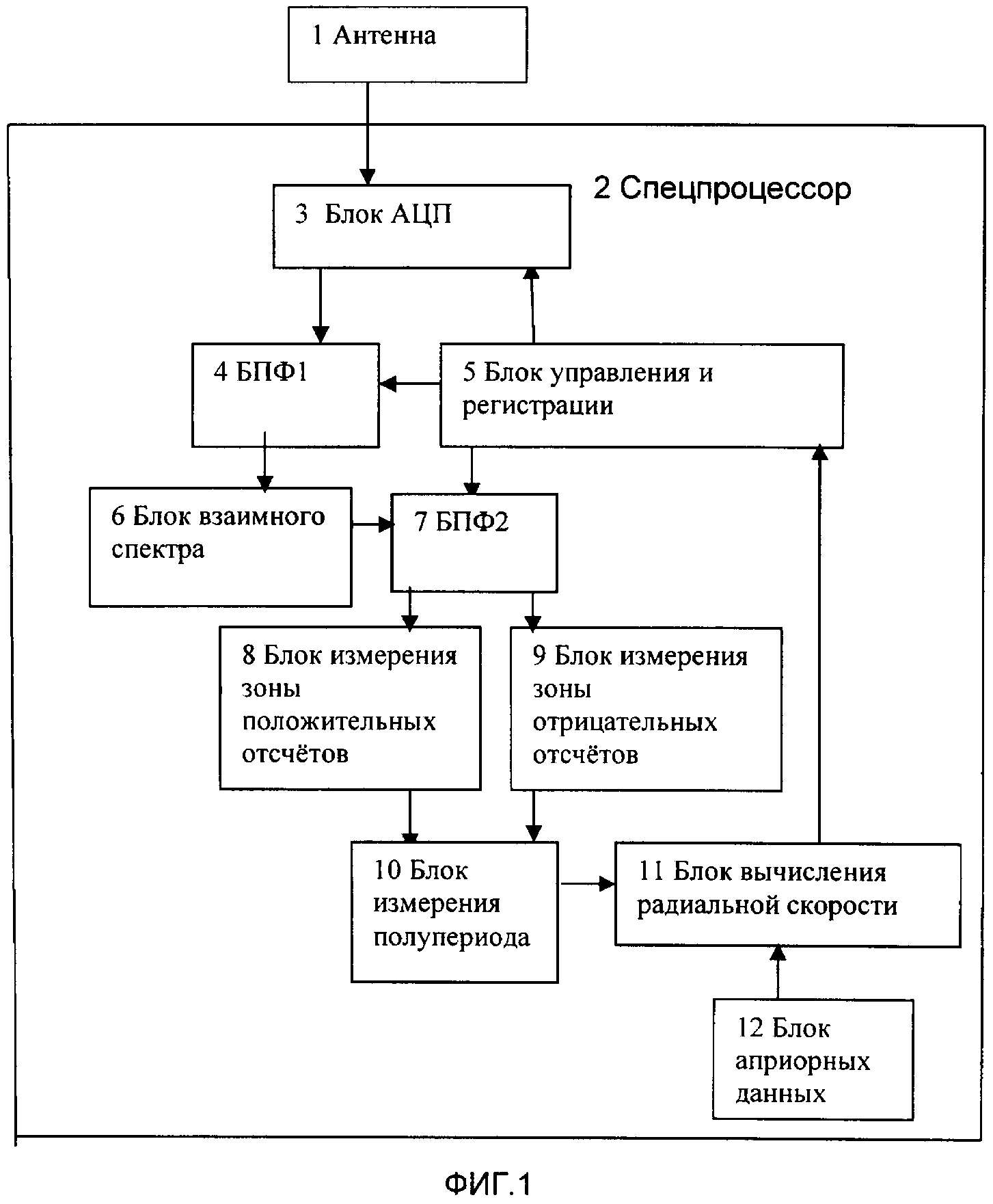
Сущность изобретения поясняется фиг. 1 и фиг. 2, где на фиг. 1 представлена блок схема устройства реализующего способ, на фиг. 2 - последовательность измерений полупериода несущей автокорреляционной функции.
На фиг 1 антенна 1 соединена со спецпроцессором 2, в который входят последовательно соединенные аналого-цифровой преобразователь АЦП 3, блок 4 спектрального анализа БПФ1, блок 6 определения взаимного спектра, блок 7 спектрального анализа БПФ2. Первый вход блока 8 определения зоны положительных отсчетов соединен с первым входом блока 10 измерения полупериода и через первый вход блока11 вычисления радиальной скорости, через первый вход блока 5 управления и регистрации соединен со вторым входом блока 3 АЦП. Второй выход блока 5 управления и регистрации через второй вход блока 7 БПФ2, через первый вход блока 9 измерения зоны отрицательных отсчетов соединен со вторым входом блока 10 измерения полупериода, а третий выход блока 5 соединен со вторым входом блока 4 БПФ1. Блок априорных данных соединен со вторым входом блока 11 вычисления скорости.
Пример осуществления предлагаемого способа целесообразно рассмотреть на примере работы устройства, реализующего способ.
Работа устройства в соответствии с представленной схемой происходит следующим образом.
Сигнал шумоизлучения объекта принимается антенной 1 и передается на блок АЦП 3 спецпроцессора 2, где происходит преобразование аналогового сигнала принятого антенной 1 в цифровой вид и последовательными временными порциями временные реализации передаются в блок 4 БПФ1. В блоке 4 происходит измерение спектра входного процесса по набранной временной реализации. С выхода блока 4 спектр первой реализации поступает в блок 6 определения взаимного спектра, где запоминается и при поступлении следующего спектра очередного набора временной реализации определяется взаимный спектр между первой и второй реализациями. Определение взаимного спектра производится по стандартным процедурам, которые реализованы в любых цифровых процессорах. Взаимный спектр представляет собой спектр, который содержится одновременно в двух набранных временных последовательностях, что повышает достоверность измерения. Если эти два соседних процесса не будут иметь одинаковый спектр, то взаимный спектр не сформируется. С выхода блока 6 взаимный спектр поступает в блок 7 БПФ2, где происходит вторичная обработка спектра и на выходе вырабатывается автокорреляционная функция сигнала шумоизлучения входного процесса между двумя последовательными временными реализациями.
Полученная автокорреляционная функция передается в блок 8 измерения зоны положительных отсчетов, где выбираются максимальные положительные отсчеты, определяются крайние положительные отсчеты, измеряются их временное положении t2, t4 и амплитуды А2 и A4 и передаются в блок 10 измерения полупериода. Одновременно эта же автокорреляционная функция передается в блок 9 определения зоны отрицательных отсчетов, где определяются амплитудные значения Α1 и А3 и временные положения t1, t3 крайних отрицательных отсчетов соседних с зоной положительных отсчетов и передаются на второй вход блока 10 измерения полупериода. По измеренным значениям A1, t1, А2, t2, A3, t3, A4, t4 производится вычисление временных положений Τ1 и Т2 и определение положительного полупериода несущей автокорреляционной функции. Полученное значение полупериода передается в блок 11 вычисления радиальной скорости, где запоминается. Через определенный интервал времени выбирается N-й временной интервал и N+1-й временной интервал и повторяется процедура измерения полупериода. В блоке 11 определяется разность полупериодов и на основе априорных данных из блока 12 тех же, что и рассматривались в прототипе вводится коэффициент Κv и определяется радиальная скорость перемещения объекта шумоизлучения. Оценка полученной радиальной скорости передается в блок 5 управления и регистрации. Скорость изменения периода определяется за время между измерениями взаимного спектра между 1-м набором временной реализации и N-м набором временной реализации, что напрямую связано с изменением дистанции за это время.
Принципы цифрового преобразование и обработки достаточно подробно приведены в работе (Применение цифровой обработки сигналов. Под ред. Оппенгейма, М.: Мир, 1980 г., стр. 389-436) При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса.(там же стр. 296.) В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение спектров сигнала шумоизлучения, автокорреляционную обработку и процедуры анализа спектров. Вопросы реализации спецпроцессоров достаточно подробно рассмотрены в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» С-Пб. Наука, 2004 г., стр. 281.
Таким образом, измеряя взаимный спектр между последовательными временными наборами временной реализации и определяя изменение периода средней частоты спектра шумоизлучения объекта через непосредственное измерение периода несущей автокорреляционной функции принятого сигнала шумоизлучения можно повысить точность определения радиальной скорости объекта шумоизлучения.
Способ измерения радиальной скорости объекта по его шумоизлучению, содержащий прием сигнала шумоизлучения объекта, дискретизацию принятого входного сигнала с интервалом дискретизации D, спектральный анализ принятого сигнала на основе быстрого преобразования Фурье и получение автокорреляционной функции на основе обратного преобразования Фурье, измерение периода несущей частоты автокорреляционной функции и измерение радиальной скорости с учетом Kv - коэффициента пропорциональности, определяемого экспериментально в полосе обработки принятого сигнала, отличающийся тем, что прием сигнала осуществляют одной антенной, взаимный спектр определяют между двумя последовательными временными наборами, а автокорреляционную функцию измеряют от измеренного взаимного спектра, определяют зону положительных отсчетов максимума автокорреляционной функции, определяют зону отрицательных отсчетов до начала зоны положительных отсчетов и зону отрицательных отсчетов после зоны положительных отсчетов, определяют граничные отсчеты, имеющие разную полярность, измеряют амплитуду A отсчета, имеющего отрицательную полярность, измеряют значение времени этого отсчета t, измеряют амплитуду отсчета А, имеющего положительную полярность, следующую за отрицательным отсчетом, измеряют значение времени, принадлежащего этому отсчету t, вычисляют значение времени нулевой амплитуды сигнала несущей автокорреляционной функцию по формуле T=AD/(A+А), измеряют амплитуду А отсчета, имеющую отрицательную полярность, из зоны, следующей за положительной зоной, измеряют значение времени этого отсчета t, измеряют амплитуда отсчета А, имеющего положительную полярность, предшествующего отрицательному отсчету, измеряют значение времени, принадлежащее этому отсчету t, вычисляют временное положение нулевой амплитуды сигнала несущей автокорреляционной функции по формуле Т=AD/(A+А), вычисляют полупериод несущей частоты автокорреляционной функции по формуле П=Т-T, повторяют процедуру измерения полупериода несущей частоты автокорреляционной функции для взаимных спектров между N очередными последовательными временными реализациями, вычисляют полупериод несущей частоты очередной автокорреляционной функции П, определяют разность между измерениями полупериодов П-П, если разность положительная, то объект удаляется, если разность отрицательная, то объект приближается, а радиальную скорость объекта определяют по формуле Vr=Kv(П-П).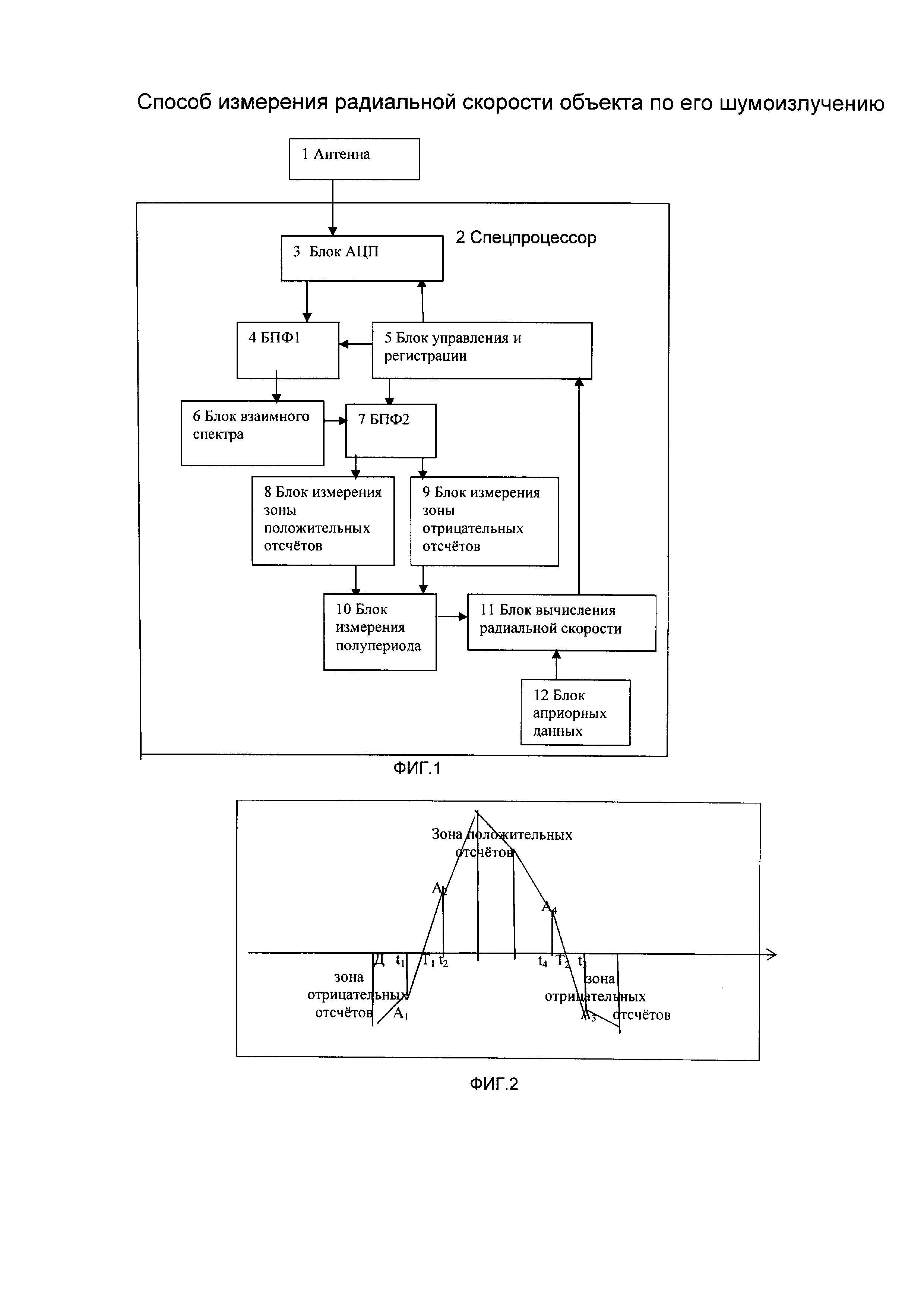
Система шумопеленгования гидроакустического комплекса подводной лодки
Система противоторпедной защиты гидроакустического комплекса подводной лодки
Устройство и способ контроля и регулировки плавучести гидрофонного модуля сейсмокосы
Гидроакустическая станция для обнаружения малоразмерных объектов
Способ пассивного определения координат источников гидроакустического излучения
Способ отождествления объектов, обнаруженных несколькими системами
Способ панорамной классификации шумящих объектов
Устройство измерения коэффициента корреляции
Способ классификации морских объектов в типовой шумопеленгаторной станции
Устройство для измерения характеристики направленности гидроакустической антенны
Способ определения параметров маневрирования источника зондирующих сигналов
Способ отображения гидроакустической информации

