СИСТЕМА ДЛЯ ОПИСАНИЯ СТИЛЯ ВОЖДЕНИЯ У ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
ИСПРАШИВАНИЕ ПРИОРИТЕТА
Настоящая заявка является частичным продолжением и по ней испрашивается приоритет на основании заявки на патент США № 13/548716, поданной 13 июля 2012 г., по которой испрашивается приоритет на основании заявки на европейский патент № 12154654.3, поданной 9 февраля 2012 г., все содержимое которых включено в настоящий документ путем ссылки.
УРОВЕНЬ ТЕХНИКИ
Настоящая заявка на патент на промышленное изобретение относится к системе оценки показателя риска, ассоциированного со стилем вождения у водителя транспортного средства.
Настоящая заявка на патент на промышленное изобретение относится к системе оценки показателя риска, ассоциированного со стилем вождения у водителя транспортного средства.
На рынке широко известны спутниковые навигационные системы для транспортных средств, которые работают по протоколу GPS для указания точного положения транспортного средства на территории.
На рынке широко известны устройства спутникового определения местонахождения, которые также используются в качестве противоугонного устройства, чтобы сигнализировать положение похищенного транспортного средства.
Также известны детекторы аварии (датчики столкновения) для транспортных средств, как правило, в виде акселерометров, которые обнаруживают внезапное изменение ускорения транспортного средства, указывающее на столкновение. Упомянутые датчики столкновения обычно соединяют с подушками безопасности транспортного средства.
Также известны мобильные телефоны, встроенные в транспортное средство, которые работают по протоколу GSM или GPRS, чтобы осуществлять телефонные вызовы из транспортного средства.
US2005/037730, WO2009/133450, GB2390208, US202/037707 раскрывают устройства, смонтированные в транспортном средстве, чтобы сигнализировать об аварии в соответствующее учреждение, например аварийную службу, полицию и т.п.
Однако ни один из вышеупомянутых документов известного уровня техники не раскрывает использование упомянутых устройств для оценки показателя риска у водителя транспортного средства.
Как правило, страховые полисы выдаются страховыми компаниями на основании аварийности водителя транспортного средства. Поэтому страховым компаниям было бы желательно иметь систему, способную объективно оценивать аварийность водителя транспортного средства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в создании системы оценки показателя риска у водителя транспортного средства, которая является надежной и простой в создании и использовании.
Эта задача решается в соответствии с изобретением с характеристиками, заявленными в независимом пункте 1 формулы изобретения.
Предпочтительные варианты осуществления охарактеризованы в зависимых пунктах формулы изобретения.
В соответствии с изобретением система оценки показателя риска у водителя транспортного средства использует акселерометр для обнаружения значений ускорения и замедления транспортного средства, GPS для обнаружения положения и скорости транспортного средства и модуль GSM/GPRS для отправки обнаруженных данных в оперативный центр, который вычисляет оценку показателя риска у водителя транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные характеристики изобретения станут очевиднее из нижеследующего описания, которое относится лишь к пояснительному, но не ограничивающему варианту осуществления, проиллюстрированному на приложенных чертежах, на которых:
Фиг. 1 - покомпонентный вид в перспективе корпуса, используемого для размещения устройства для реализации процесса в соответствии с изобретением;
Фиг. 2 - блок-схема, показывающая функциональные блоки и работу устройства для реализации процесса в соответствии с изобретением;
Фиг. 3 - блок-схема, показывающая процесс из изобретения;
Фиг. 4 - блок-схема, показывающая процесс, реализуемый оперативным центром;
Фиг. 5 - блок-схема оперативного центра в соответствии с одним или более вариантами осуществления;
Фиг. 6 - блок-схема способа определения пути транспортного средства в соответствии с одним или более вариантами осуществления;
Фиг. 7 - блок-схема способа определения одной или более уникальных точек привязки GPS для каждой точки GPS в соответствии с одним или более вариантами осуществления;
Фиг. 8 - блок-схема способа ассоциации точек GPS с одной или более точками привязки GPS в соответствии с одним или более вариантами осуществления;
Фиг. 9 - блок-схема способа определения одного или более предполагаемых путей транспортного средства для каждой уникальной точки привязки GPS в соответствии с одним или более вариантами осуществления; и
Фиг. 10 - блок-схема системы сопоставления с картой для определения пути транспортного средства в соответствии с одним или более вариантами осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее описание изобретения предусматривает много различных вариантов осуществления или примеров реализации различных признаков раскрытого объекта изобретения. Конкретные примеры компонентов и схем описаны ниже для упрощения настоящего раскрытия изобретения. Они являются примерами и не предназначены для ограничения.
Это описание вариантов осуществления предназначено для изучения в связи с прилагаемыми чертежами, которые должны считаться частью всего описания. В описании относительные термины, например «до», «после», «выше», «ниже», «вверх», «вниз», «верхний» и «нижний», а также их производные (например, «горизонтально», «вниз», «вверх» и т.п.), следует толковать как относящиеся к ориентации, которая описана в том случае или которая показана на рассматриваемом чертеже. Эти относительные термины служат для удобства описания и не требуют, чтобы система создавалась или управлялась в конкретной ориентации. Термины касательно прикреплений, соединений и т.п., такие как «соединенный» и «взаимосвязанный», относятся к взаимному расположению, в котором компоненты прикрепляются друг к другу либо напрямую, либо опосредованно через промежуточные компоненты, если прямо не описано иное.
Со ссылкой на вышеупомянутые чертежи описано устройство для реализации процесса в соответствии с изобретением, указываемое в общем позицией (1).
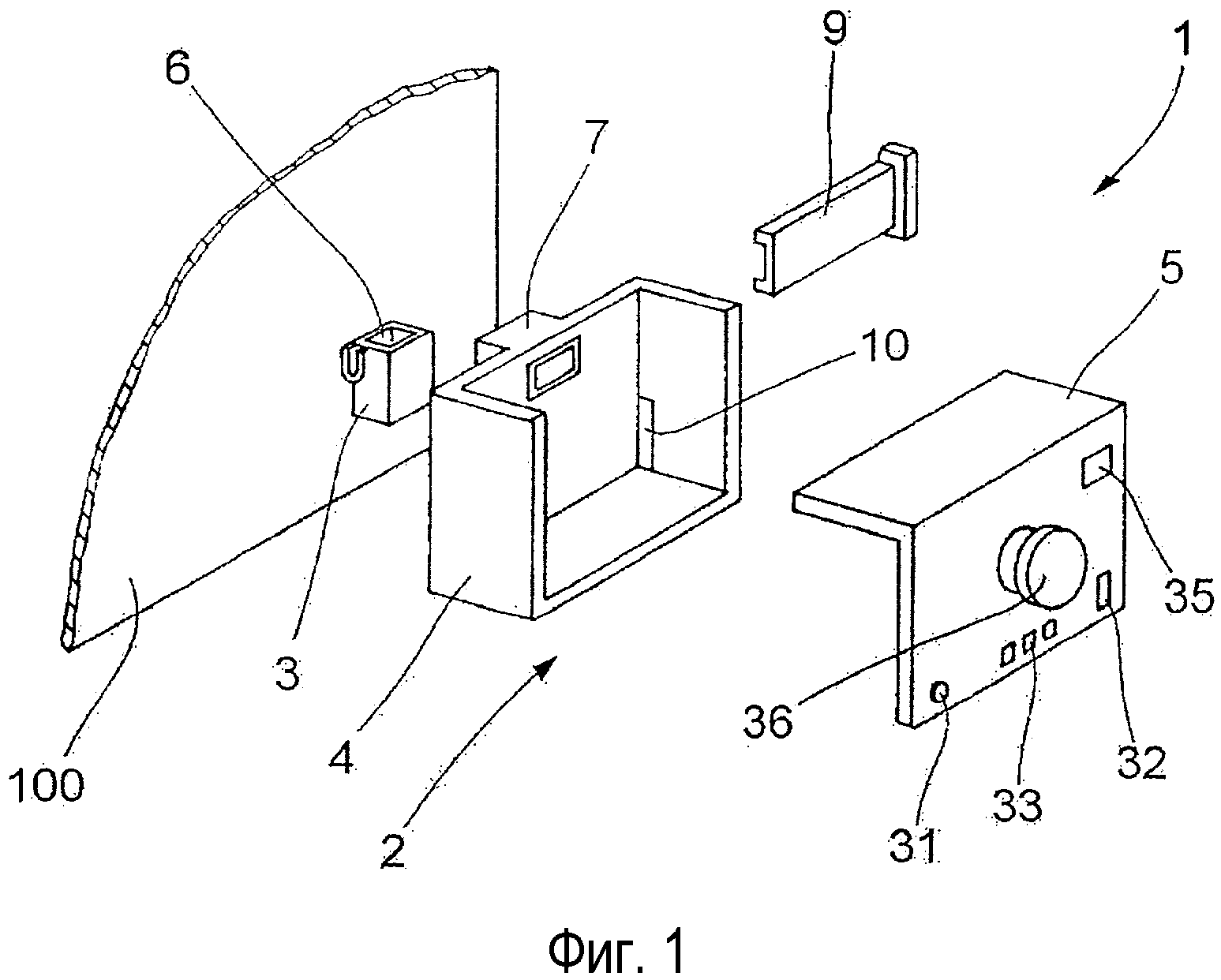
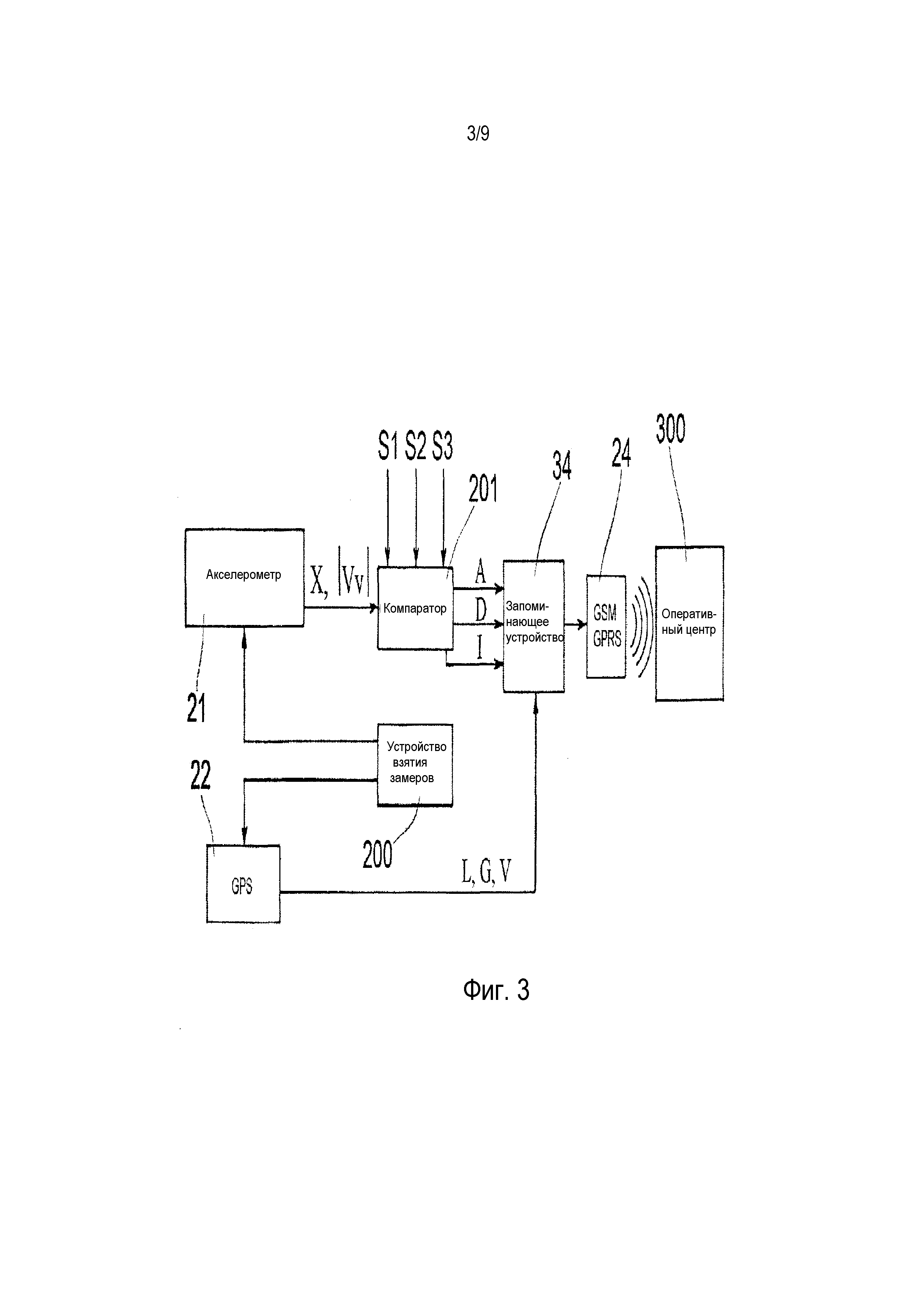
Как показано на Фиг. 1, устройство (1) содержит корпус-контейнер (2) и опорный соединитель (3).
Корпус-контейнер (2) содержит основу (4) и крышку (5) и выполнен с возможностью вмещения всех функциональных блоков, показанных на Фиг. 2, как проиллюстрировано ниже.
Возвращаясь к Фиг. 1, опорный соединитель (3) крепится к ветровому стеклу (100) транспортного средства с помощью клеевой ленты. Как показано на Фиг. 2, электрические контакты (6) предусмотрены в опорном соединителе (3) для контактирования с электрическими контактами (6a) взаимодополняющего соединителя (7), предусмотренного на основе корпуса-контейнера.
Как показано на Фиг. 2, опорный соединитель (3) соединен с батарей (101) транспортного средства посредством электрических кабелей.
Возвращаясь к Фиг. 1, устройство (1) при желании может снабжаться модулем связи Bluetooth (9), который может вставляться в специальный разъем (10) основы корпуса (2).
Как показано на Фиг. 2, модуль связи Bluetooth (9) взаимодействует с модулем (102) передачи по Bluetooth, соединенным с устройством (103) извлечения, выполненным с возможностью извлечения информации о транспортном средстве из блока управления транспортным средством.
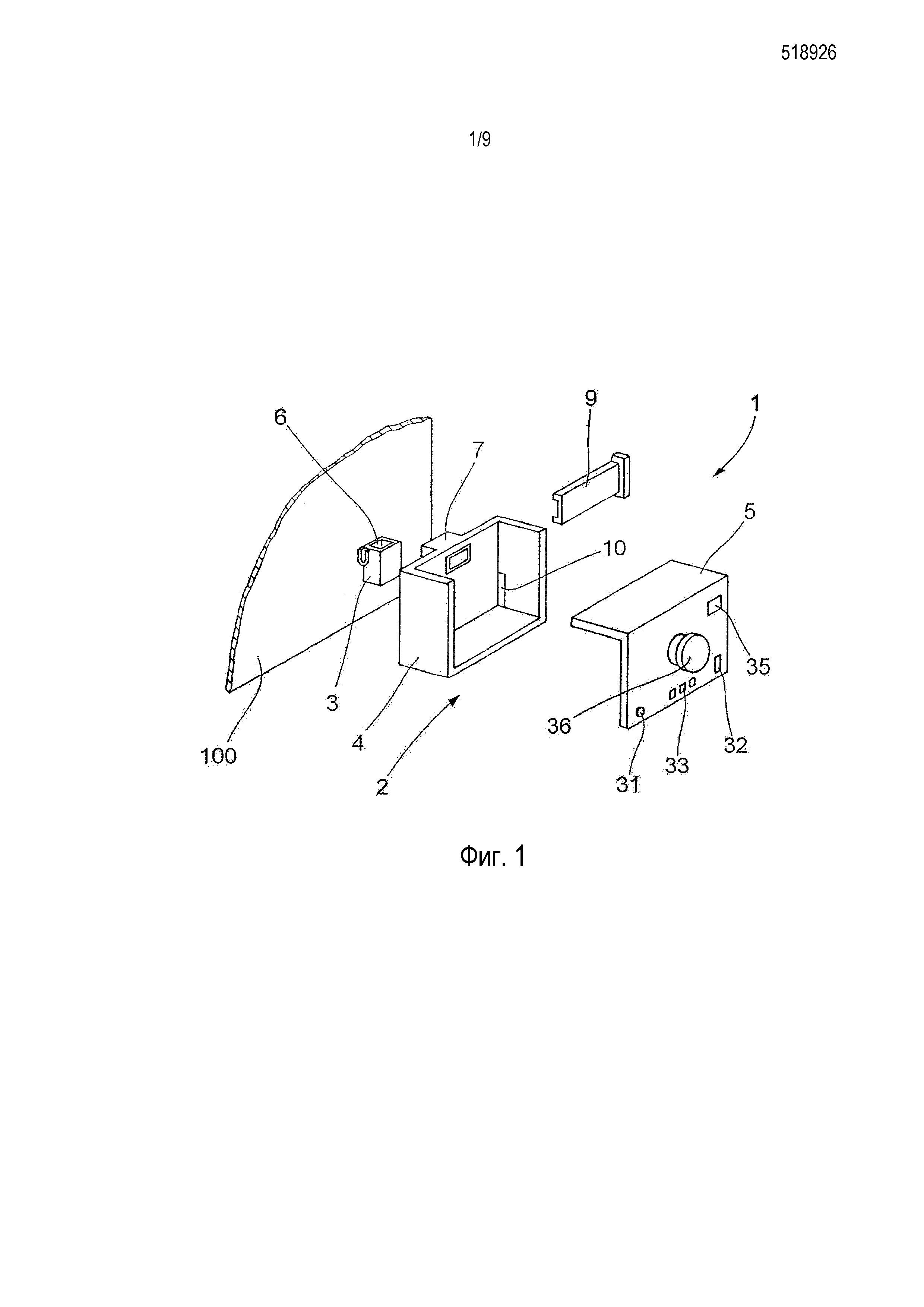
Корпус (2) содержит микроконтроллер (20), акселерометр (21), модуль (22) спутников GPS, блок (23) питания и модуль (24) мобильной телефонии GSM/GPRS.
Микроконтроллер (20) управляет работой всех устройств в устройстве (1).
Акселерометр (21) предпочтительно является трехкоординатным, выполненным с возможностью обнаружения внезапных ускорений или замедлений транспортного средства, указывающих на ненадлежащее вождение либо аварию.
Модуль (22) спутников GPS снабжается встроенной антенной (25) GPS, чтобы обнаруживать точное положение транспортного средства.
Блок (23) питания содержит генератор (26) напряжения, который берет энергию 9-36 В от батареи (101) транспортного средства и преобразует ее для соответствующего питания всех устройств, содержащихся в корпусе устройства. Блок (23) питания также содержит резервную перезаряжаемую батарею (27), содержащуюся в корпусе (2).
Модуль (24) мобильной телефонии GSM/GPRS содержит встроенную антенну (28) GSM для соединения с сетью мобильной телефонии. Модуль (24) мобильной телефонии GSM/GPRS также содержит один аудиовход (29) и один аудиовыход (30) типа «громкой связи». Как показано на Фиг. 1, аудиовход (29) и аудиовыход (30) соединены соответственно с микрофоном (31) и громкоговорителем (32), установленными на стенках крышки (5) корпуса. Модуль (24) мобильной телефонии GSM/GPRS выполнен с возможностью соединения с центром помощи таким образом, чтобы отправлять сообщения и/или связывать водителя транспортного средства с центром помощи.
Установка устройства (1) на ветровом стекле (100) транспортного средства предусматривает размещение микрофона (31) и громкоговорителя (32) в наилучшем положении для использования водителем.
Устройство (1) содержит запоминающее устройство для данных (34). Запоминающее устройство (34) может быть флэш-памятью NAND последовательного типа.
При желании устройство (1) может содержать блок LED (33), зуммер (35) и аварийную кнопку (36).
Блок (33) LED, зуммер (35) и аварийная кнопка (36) устанавливаются на стенке крышки (5) корпуса, чтобы быть доступными для пользователя. Аварийная кнопка (36) соединена с модулем (24) мобильной телефонии для связи водителя с центром помощи.
Возвращаясь к Фиг. 1, нужно принять во внимание, что опорный соединитель (3), основа (4) и крышка (5) корпуса соединены друг с другом посредством ключа или противовзломного винта. Кроме того, микроконтроллер (20) постоянно контролирует электрические контакты (6, 6a) соединителя (3) и корпуса (2), чтобы обнаружить возможную попытку отсоединения корпуса от соединителя или взлом.
Ниже описана работа устройства (1).
Модуль (22) GPS постоянно обнаруживает точное положение транспортного средства. Когда транспортное средство попадает в аварию, акселерометр (21) обнаруживает аварию и отправляет сигнал в микроконтроллер (20). Микроконтроллер (20) активизирует модуль (24) GSM/GPRS, который отправляет сигнал аварии в центр помощи вместе с точным положением транспортного средства, обнаруженным модулем (22) GPS. Поэтому центр помощи может обеспечить транспортному средству быструю помощь. Кроме того, посредством модуля (24) GSM/GPRS водитель связывается с центром помощи.
Устройство (1) согласно изобретению допускает следующие функции:
В случае угона определить местонахождение транспортного средства посредством модуля (22) GPS.
Собрать данные для записи использования транспортного средства (пройденные километры по типу дороги и время использования) и собрать данные для оценки «манеры вождения» у водителя посредством модуля (9) связи Bluetooth.
Отправить упомянутую информацию на удаленную станцию посредством модуля (24) GSM/GPRS.
Обнаружить попытку удаления и/или взлома посредством микроконтроллера (20), соединенного с электрическими контактами.
Сформировать сигнал тревоги в случае удаления и/или взлома посредством зуммера (35) и отправить сигнал тревоги на удаленную станцию посредством модуля (24) GSM/GPRS.
Активировать экстренный вызов посредством аварийной кнопки (36) и модуля (24) GSM/GPRS.
Обнаружить столкновение (определение столкновения: удар с ускорением выше 2,5g) посредством акселерометра (21).
Сформировать сигнал тревоги в случае столкновения посредством зуммера (35); отправить информацию о столкновении на удаленную станцию посредством модуля (24) GSM/GPRS и в случае столкновения установить соединение по громкой связи с операторами внешней поддержки посредством аварийной кнопки (36) и модуля (24) GSM/GPRS.
Программное обеспечение, установленное в устройстве (1), предлагает ряд функциональных возможностей по безопасности и управлению автопарком, которые могут использоваться посредством оперативного центра.
Определение местонахождения и отслеживание транспортных средств по запросу. Периферийный блок может опрашиваться по каналам GSM/GPRS для обновления положения GPS и состояния встроенного устройства.
Обнаружение столкновения. Встроенная система обнаруживает событие столкновения посредством акселерометра (21).
Автоматический экстренный вызов. Система осуществляет автоматический вызов в оперативный центр. Информация включает в себя дату, привязку к местности и тип транспортного средства.
Ручной экстренный вызов. Система снабжается аварийной кнопкой (36), чтобы пользователь осуществил экстренный вызов.
Отправка спасателей. После выполнения необходимых проверок оперативный центр в соответствии с типом аварии отправляет спасательное средство (скорая помощь, пожарная команда, автомобиль технической помощи).
Другие события подачи сигнала тревоги. Периферийный блок управляет другими типами сигнала тревоги, например:
Угон (перемещение и/или поднятие транспортного средства).
Взлом.
Извлечение батареи. Также в этом случае осуществляется экстренный вызов в оперативный центр, включающий в себя информацию о положении транспортного средства.
Отчеты и история передвижения. Записываются отдельные передвижения, выполненные транспортным средством (запуск и глушение). Положение измеряется каждые 2 секунды, и история положений отправляется с конфигурируемой частотой по меньшей мере каждые 7 минут. Каждое измерение включает в себя широту, долготу, скорость и дату. Посредством системы кодирования собственной разработки трафик, формируемый для передачи упомянутых данных, не превышает 300 Кб в месяц при условии среднего использования транспортного средства около 2 часов в день.
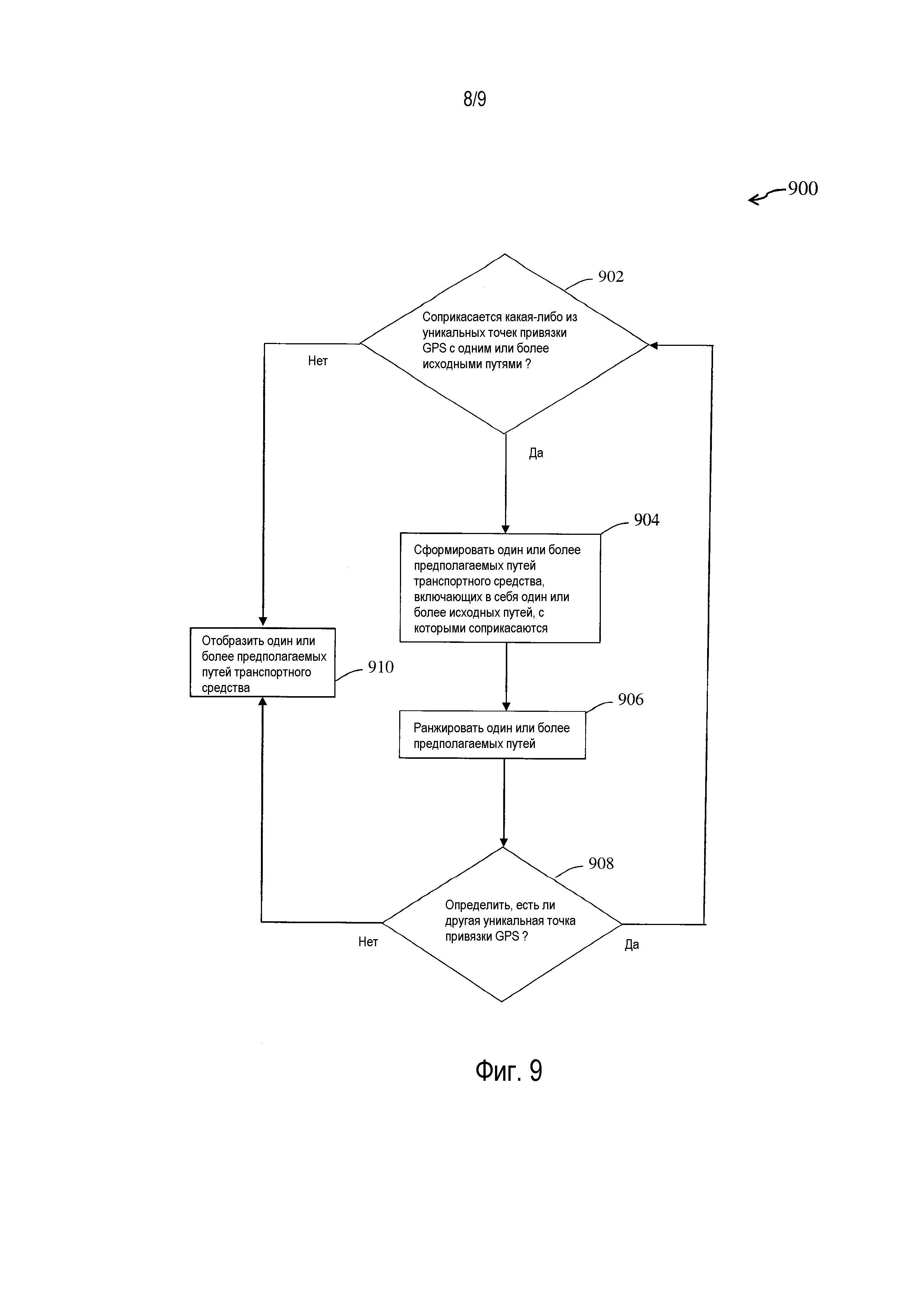
Как показано на Фиг. 3, микропроцессор (20) содержит устройство (200) выборки и компаратор (201). Устройство (200) выборки опрашивает акселерометр (21) с частотой от 800 до 1200 Гц. Измерения ускорений (A), обнаруженных акселерометром (21), обрабатываются микропроцессором (20), который отвечает за идентификацию внезапных ускорений/замедлений, выполненных водителем и указывающих на ненадлежащее вождение, и очень резких ускорений и замедлений, выполненных транспортным средством и указывающих на столкновение.
Во время установки устройства (1) матрица вращения определяется автоматически для перехода из системы отсчета акселерометра (21) в систему отсчета транспортного средства. Матрица вращения необходима для проецирования измерений ускорения из системы отсчета акселерометра (Xa Ya Za) в систему отсчета транспортного средства (X Y Z) при условии, что в системе отсчета транспортного средства ось X соответствует направлению передвижения, а ось Y ортогональна и компланарна оси X. Акселерометр (21) обнаруживает вектор va(x,y,z) ускорения по трем осям в системе XaYaZa отсчета. Вектор va проецируется в систему XYZ отсчета транспортного средства, получая вектор vv(x,y,z). Компонент X вектора vv представляет мгновенное ускорение, записанное по направлению передвижения транспортного средства и полезное для оценки внезапных ускорений и торможений. Обнаруживается ускорение, если компонент X вектора vv является положительным, тогда как обнаруживается замедление, если компонент (X) вектора vv является отрицательным. Чтобы идентифицировать столкновение, система принимает во внимание модуль вектора vv. В компаратор (201) отправляются два элемента, то есть компонент x вектора vv и модуль vv. Компонент X сравнивается с пороговыми значениями S1, S2, а модуль vv сравнивается с пороговым значением S3. Первое пороговое значение (S1) указывает на внезапное ускорение и устанавливается приблизительно в ½g. Второе пороговое значение (S2) указывает на внезапное замедление и устанавливается приблизительно в -½g. Третье пороговое значение (S3) указывает на очень резкое ускорение/замедление, указывающее на возможное столкновение, и устанавливается приблизительно в 2g.
Если компонент X вектора vv больше первого порогового значения (S1), то компаратор (201) отправляет в запоминающее устройство (34) сигнал (A), указывающий на внезапное ускорение. Если компонент X вектора vv меньше второго порогового значения (S2), то компаратор (201) отправляет в запоминающее устройство (34) сигнал (D), указывающий на внезапное замедление. Если модуль вектора vv больше третьего порогового значения (S3), то компаратор (201) отправляет в запоминающее устройство (34) сигнал (I), указывающий на столкновение.
Если компаратор (201) обнаруживает, что модуль вектора vv превышает третье пороговое значение (S3), то микроконтроллер (20) записывает весь набор данных измеренных ускорений в запоминающее устройство (34) в диапазоне между 10 секундами до и 3 секундами после момента, в который превышается пороговая величина. Затем микроконтроллер (20) локально записывает в запоминающее устройство (34) событие, идентифицируя его как событие столкновения (I).
Значения внезапного ускорения (A), значения внезапного замедления (B) и события столкновения (I) отправляются в оперативный центр (300) посредством модуля (24) GSM/GPRS.
Микропроцессор (20) опрашивает GPS (22) с частотой приблизительно 1-10 Гц. GPS (22) обнаруживает три значения: широту (L), долготу (G) и скорость (V) транспортного средства. Измерения широты (L), долготы (G) и скорости (V), полученные GPS (22), записываются в запоминающее устройство (34), чтобы их последовательно отправили в удаленный оперативный центр (300) посредством модуля GSM/GPRS (24).
Если сигнал GPS недоступен, то скорость транспортного средства (V) обнаруживается устройством (103) извлечения информации в блоке управления транспортного средства и отправляется в запоминающее устройство (34) в устройстве посредством модулей (102, 9) Bluetooth.
С программируемыми интервалами или по запросу от удаленного оперативного центра (300) устройство (1) отправляет полученные данные в оперативный центр (300) посредством модуля (24) GSM/GPRS. Удаленный оперативный центр (300) принимает данные от устройства (1) и записывает их в базу данных, чтобы обеспечить их для вычисления показателя риска, ассоциированного со стилем вождения у водителя транспортного средства. Вычисление показателя риска выполняется с равными интервалами, когда оперативный центр (300) собрал значимое количество данных. В некоторых вариантах осуществления база данных хранится на носителе 1004 информации.
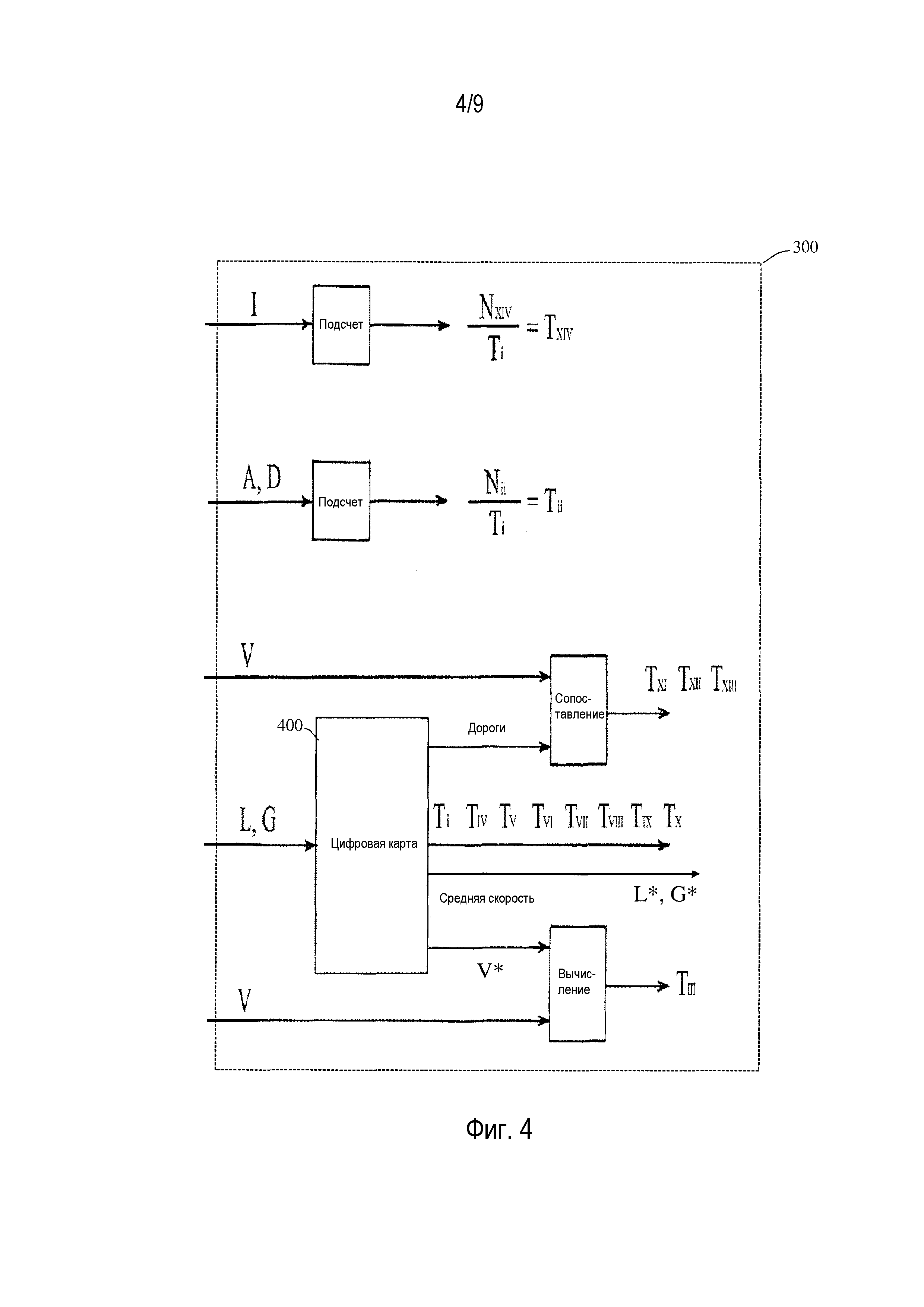
Фиг. 4 - блок-схема процесса, реализуемого оперативным центром 300. Как показано на Фиг. 4, оперативный центр 300 принимает первую широту (L), первую долготу (G) и скорость транспортного средства (V), обнаруженные GPS (22). В некоторых вариантах осуществления каждая точка данных первой широты (L) и первой долготы (G), обнаруженных GPS (22), проецируется на цифровую карту 400 посредством алгоритма сопоставления с картой. В некоторых вариантах осуществления каждая точка данных первой широты (L) и первой долготы (G) ассоциируется с соответствующим узлом GPS. В некоторых вариантах осуществления узел GPS является координатами, соответствующими первой широте (L) и первой долготе (G). В некоторых вариантах осуществления ошибка, внесенная GPS (22), уменьшается путем проецирования каждой точки данных первой широты (L) и первой долготы (G) с помощью цифровой карты 400 и восстановления пути транспортного средства так, что восстановленный путь транспортного средства придерживается одной или более карт дорог, извлеченных из внешней дорожной сети. В некоторых вариантах осуществления каждая точка данных первой широты (L) преобразуется в соответствующую вторую широту (L*). В некоторых вариантах осуществления каждая точка данных первой долготы (G) преобразуется в соответствующую вторую долготу (G*). В некоторых вариантах осуществления каждая из соответствующей второй широты (L*) и соответствующей второй долготы (G*) ассоциируются с соответствующей уникальной точкой привязки GPS. В некоторых вариантах осуществления уникальная точка привязки GPS является координатами, соответствующими второй широте (L*) и второй долготе (G*). В некоторых вариантах осуществления каждый из узлов GPS преобразуется в соответствующий элемент одной или более нескольких уникальных точек привязки GPS. В некоторых вариантах осуществления ошибка, внесенная GPS (22), уменьшается путем преобразования одного или более узлов GPS в одну или более уникальных точек привязки GPS на цифровой карте 400 посредством второго алгоритма сопоставления с картой (например, показанного в виде способа 500 на Фиг. 5).
В некоторых вариантах осуществления данные GPS, спроецированные на карту (например, первая широта (L), первая долгота (G), вторая широта (L*) или вторая долгота (G*), скорость транспортного средства (V), обнаруженная GPS или блоком управления транспортного средства, скорость транспортного средства (V*), определенная цифровой картой 400, внезапные ускорения и замедления (A, D) и события столкновения (I), обнаруженные акселерометром), используются для получения параметров, указывающих на стиль вождения у водителя транспортного средства.
В некоторых вариантах осуществления ускорения (A) и замедления (D) подсчитываются таким образом для получения количества (Nii), и также аварии (I) подсчитываются таким образом для получения количества аварий (Nxiv).
В некоторых вариантах осуществления следующая информация получается из широты (L) и долготы (G), обнаруженных GPS (22), и проецируется на карту, придерживаясь пути транспортного средства на карте: общее количество километров, пройденных транспортным средством, и километры, пройденные транспортным средством по разным типам дорог, например автомагистралям, пригородным дорогам, городским дорогам, улицам с односторонним движением, улицам с двусторонним движением. Также получается информация о проездах транспортного средства, то есть количестве раз, которое транспортное средство проезжает перекресток или перекресток с круговым движением.
В некоторых вариантах осуществления первая широта (L), первая долгота (G) и скорость (V), обнаруженные несколькими устройствами (1), установленными в циркулирующих транспортных средствах, и вторая широта (L*) или вторая долгота (G*) либо скорость транспортного средства (V*) используются системой в оперативном центре (300) для вычисления средней скорости (VM) для каждого участка дороги цифровой карты, то есть скорости, поддерживаемой большинством пользователей на определенном участке дороги. В некоторых вариантах осуществления скорость транспортного средства (V*) определяется между каждой уникальной точкой привязки GPS по меньшей мере из второй широты (L*) и второй долготы (G*). Например, скорость транспортного средства (V*) определяется по формуле 1:

Где V* - скорость транспортного средства между текущей уникальной точкой привязки GPS и предыдущей уникальной точкой привязки GPS, Scurrent - текущая уникальная точка привязки GPS, Sprevious - предыдущая уникальная точка привязки GPS, Tcurrent - время для текущей уникальной точки привязки GPS, и Tprevious - время для предыдущей уникальной точки привязки GPS. В некоторых вариантах осуществления V* является средней скоростью транспортного средства между текущей уникальной точкой привязки GPS и предыдущей уникальной точкой привязки GPS. В некоторых вариантах осуществления средняя скорость транспортного средства (V*) определяется по меньшей мере из пути транспортного средства.
Последовательно, путем сравнения значений скорости (V), обнаруженных GPS (22) или устройством извлечения информации (103), со средней скоростью (VM) на участке дороги, по которому движется транспортное средство, или скоростью транспортного средства (V*), получается информация о количестве раз, которое отдельный водитель превышает скорость (отклонение скорости отдельного пользователя от поведения в среднем). В некоторых вариантах осуществления определяется количество раз, которое одно или более значений средней скорости водителя транспортного средства (V*) превышают среднюю скорость транспортного средства на одном или более участках дороги (VM). В некоторых вариантах осуществления определяется количество раз, которое одно или более значений средней скорости (V), обнаруженных GPS (22), превышают среднюю скорость транспортного средства на одном или более участках дороги (VM). В некоторых вариантах осуществления стиль вождения у водителя транспортного средства описывается по меньшей мере из одного или более значений средней скорости (V*) водителя транспортного средства. В некоторых вариантах осуществления стиль вождения у водителя транспортного средства описывается по меньшей мере из одного или более значений скорости (V), обнаруженных GPS (22).
Кроме того, путем сопоставления значений скорости (V), обнаруженных GPS (22), или значений скорости (V*), обнаруженных устройством (103) извлечения информации, с дорогами, пройденными транспортным средством, обнаруженными из карт, получается информация о средней скорости на различных типах дороги, например автомагистралях, пригородных дорогах, городских дорогах.
Нижеследующие параметры вычисляются компьютерной программой в оперативном центре (300):
i. Общее количество пройденных километров
ii. Количество внезапных ускорений (A) и/или замедлений (D)/общее количество километров
iii. Количество раз, которое превышается скорость
iv. Километры, пройденные по автомагистралям/общее количество километров
v. Километры, пройденные по пригородным дорогам/общее количество километров
vi. Километры, пройденные по городским дорогам/общее количество километров
vii. Количество проездов перекрестка/пройденные километры
viii. Количество проездов перекрестка с круговым движением/пройденные километры
ix. Километры, пройденные по дорогам с односторонним движением/общее количество километров
x. Километры, пройденные по дорогам с двусторонним движением/общее количество километров
xi. Средняя скорость по автомагистрали
xii. Средняя скорость по пригородным дорогам
xiii. Средняя скорость по городским дорогам
xiv. Количество аварий (I)
Эти параметры (Ti…Txiv) представляют собой члены многочлена типа P=K1Ti+K2Tii+…K14Txiv. Результатом многочлена является значение, которое соответствует стилю вождения у водителя.
Коэффициенты (K1…K14) определяются в соответствии с анализом, который должен осуществляться на значимой выборке испытуемых пользователей с заранее установленным известным поведением. Например, можно запланировать калибровочную операцию модели с n типологиями разных пользователей, передвигающихся в течение одной недели: первое подмножество пользователей, придерживающееся манеры вождения с большой осторожностью, второе подмножество, придерживающееся нормального поведения, и третье подмножество, придерживающееся рискованного поведения.
Следовательно, можно будет собрать три подмножества однородных данных, а затем вычислить характерное значение стиля вождения (P) для трех разных классов риска (осторожный, нормальный, рискованный). Поэтому определение коэффициентов K таково, что эти коэффициенты линейно или полиномиально интерполируют промежуточные поведения пользователей, и многочлен обеспечивает число между 0 и 10, представляющее риск пользователя P=0 (низкий риск); P=10 (высокий риск).
Фиг. 5 - блок-схема оперативного центра 500 в соответствии с одним или более вариантами осуществления. В некоторых вариантах осуществления оперативный центр 500 является вариантом осуществления удаленного оперативного центра 300, показанного на Фиг. 3 и 4. Оперативный центр 500 включает в себя систему 502 сопоставления с картой. В некоторых вариантах осуществления система 502 сопоставления с картой определяет путь транспортного средства путем реализации способа 600, 700, 800 или 900. В некоторых вариантах осуществления система 502 сопоставления с картой является вариантом осуществления цифровой карты 400, показанной на Фиг. 4.
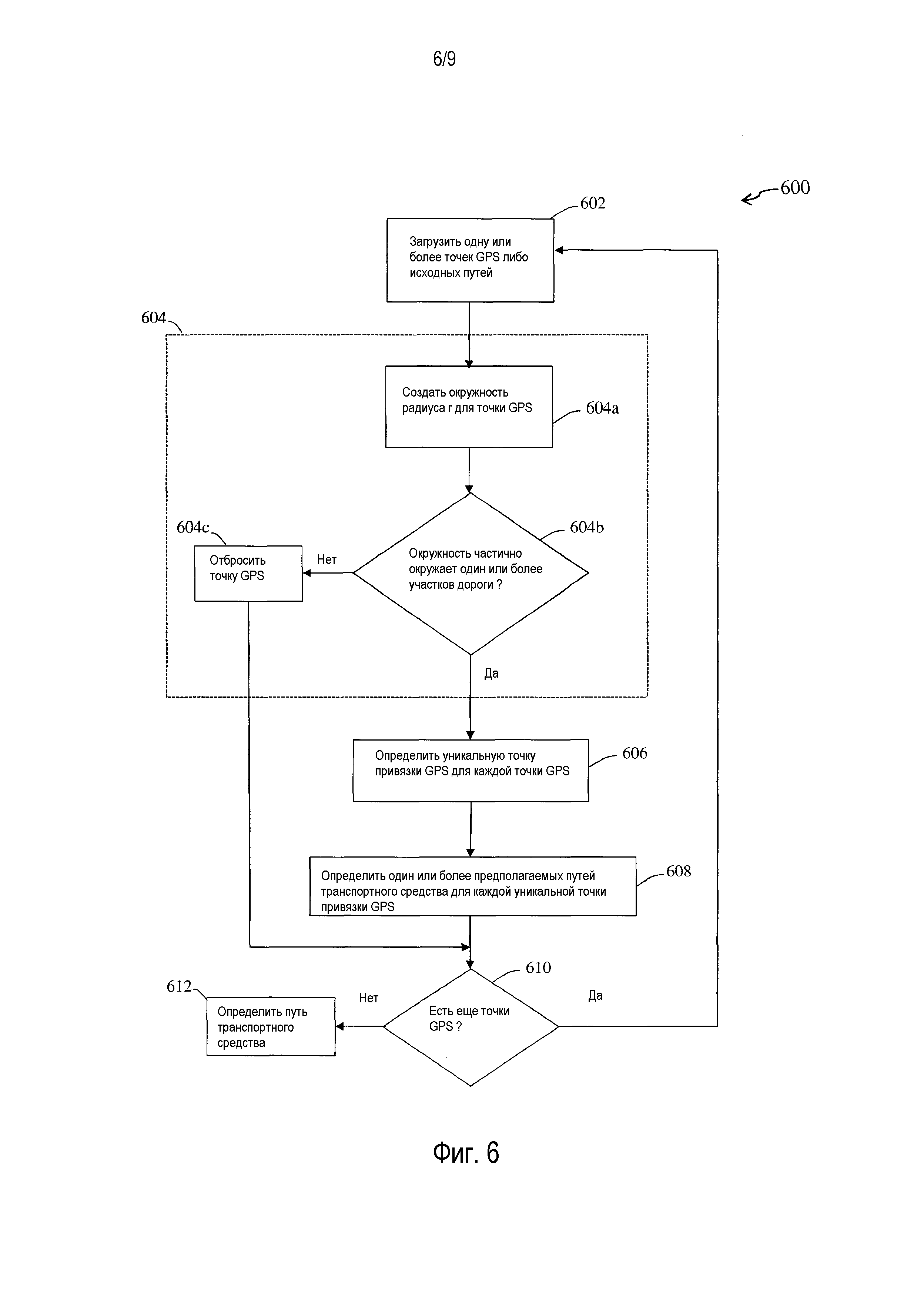
Фиг. 6 - блок-схема способа 600 определения пути транспортного средства в соответствии с одним или более вариантами осуществления. В некоторых вариантах осуществления способ 600 реализуется системой 502 сопоставления с картой. Способ 600 начинается с этапа 602, на котором одна или более точек GPS или один или более исходных путей загружаются в систему 502 сопоставления с картой. В некоторых вариантах осуществления точки GPS принимаются оперативным центром 500. В некоторых вариантах осуществления исходный путь является соединением одного или более участков дороги. В некоторых вариантах осуществления исходный путь содержит один или более предполагаемых путей транспортного средства. В некоторых вариантах осуществления участок дороги является частью дороги. В некоторых вариантах осуществления участок дороги соответствует части дороги, расположенной между двумя или более пересечениями дорог. В некоторых вариантах осуществления дорожная сеть содержит один или более участков дороги.
В некоторых вариантах осуществления каждый из узлов GPS (например, широта (L) и долгота (G)), принятых оперативным центром 300, разделяется на две или более группы. В некоторых вариантах осуществления две или более группы содержат точки GPS и ассоциированные точки GPS.
В некоторых вариантах осуществления точки GPS соответствуют узлам GPS, не ассоциированным с одним или более участками дороги. В некоторых вариантах осуществления узлы GPS, не ассоциированные с одним или более участками дороги, соответствуют узлам GPS, которые не соприкасаются с одним или более участками дороги. В некоторых вариантах осуществления точки GPS были определены блоком (22) GPS не точно. В некоторых вариантах осуществления система 502 сопоставления с картой использует точки GPS для исправления точек GPS, определенных блоком (22) GPS. В некоторых вариантах осуществления система 502 сопоставления с картой использует точки GPS для исправления предполагаемого пути, определенного оперативным центром 500.
В некоторых вариантах осуществления ассоциированные точки GPS соответствуют узлам GPS, ассоциированным с одним или более участками дороги. В некоторых вариантах осуществления узлы GPS, ассоциированные с одним или более участками дороги, соответствуют узлам GPS, которые соприкасаются с одним или более участками дороги. В некоторых вариантах осуществления ассоциированные точки GPS были точно определены блоком (22) GPS.
На этапе 604 выполняется поиск в диапазоне для каждой точки GPS из одной или более точек GPS. В некоторых вариантах осуществления поиск в диапазоне определяет один или более участков дороги в диапазоне каждой точки GPS. В некоторых вариантах осуществления диапазон является неким радиусом от каждой точки GPS. Поиск в диапазоне, выполненный этапом 604, содержит этап 604a, этап 604b и этап 604c.
На этапе 604a создается окружность радиуса r вокруг каждой из точек GPS. В некоторых вариантах осуществления каждая из точек GPS является центром окружности.
На этапе 604b способ определения пути транспортного средства определяет, окружает ли окружность частично один или более участков дороги. Если способ определения пути транспортного средства определяет, что окружность частично окружает один или более участков дороги, то работа переходит к этапу 606. Если способ определения пути транспортного средства определяет, что окружность не окружает по меньшей мере частично один или более участков дороги, то работа переходит к этапу 604c.
На этапе 604c отбрасывается каждая из точек GPS. В некоторых вариантах осуществления каждая из точек GPS отбрасывается, так как точка GPS не ассоциируется с одним или более участками дороги. В некоторых вариантах осуществления отброшенная точка GPS является ошибочной точкой данных. Потом работа переходит к этапу 610.
На этапе 606 определяется одна или более уникальных точек привязки GPS для каждой из одной или более точек GPS. В некоторых вариантах осуществления каждая из одной или более уникальных точек привязки GPS является преобразованием соответствующего элемента одной или более точек GPS в один или более участков дороги. В некоторых вариантах осуществления каждая из одной или более точек GPS ассоциирована с соответствующим элементом одной или более уникальных точек привязки GPS.
На этапе 608 определяется один или более предполагаемых путей транспортного средства для каждой из одной или более уникальных точек привязки GPS. В некоторых вариантах осуществления каждый из одного или более предполагаемых путей транспортного средства является предполагаемым путем для транспортного средства на основании каждой из одной или более уникальных точек привязки GPS.
На этапе 610 способ определения пути транспортного средства определяет, есть ли еще точки GPS. Если способ определения пути транспортного средства определяет, что одна или более точек GPS недоступны, то работа переходит к этапу 612. Если система для способа определения пути транспортного средства определяет, что доступна одна или более точек GPS, то работа переходит к этапу 602.
На этапе 612 путь транспортного средства определяется из одного или более предполагаемых путей транспортного средства. В некоторых вариантах осуществления путь транспортного средства определяется путем выбора пути транспортного средства из одного или более предполагаемых путей транспортного средства в соответствии с первой релевантной информацией. В некоторых вариантах осуществления первая релевантная информация содержит минимальное значение.
В некоторых вариантах осуществления каждый предполагаемый путь транспортного средства из одного или более предполагаемых путей транспортного средства ассоциируется с соответствующим элементом одной или более стоимостей. В некоторых вариантах осуществления минимальное значение является минимальным значением соответствующего элемента одной или более стоимостей. В некоторых вариантах осуществления каждый соответствующий элемент одной или более стоимостей для каждого предполагаемого пути транспортного средства из одного или более предполагаемых путей транспортного средства содержит сумму одного или более расстояний. В некоторых вариантах осуществления каждое расстояние из одного или более расстояний является расстоянием между каждой из точек GPS из одной или более точек GPS и каждой из соответствующих уникальных точек привязки GPS из одной или более уникальных точек привязки GPS, содержащихся на каждом из одного или более предполагаемых путей транспортного средства.
В некоторых вариантах осуществления соответствующий элемент одной или более стоимостей для каждого предполагаемого пути транспортного средства из одного или более предполагаемых путей транспортного средства является вычисленной ошибкой для каждого из одного или более предполагаемых путей. В некоторых вариантах осуществления вычисленная ошибка минимизируется путем выбора одного или более путей, ассоциированных с минимальной вычисленной ошибкой.
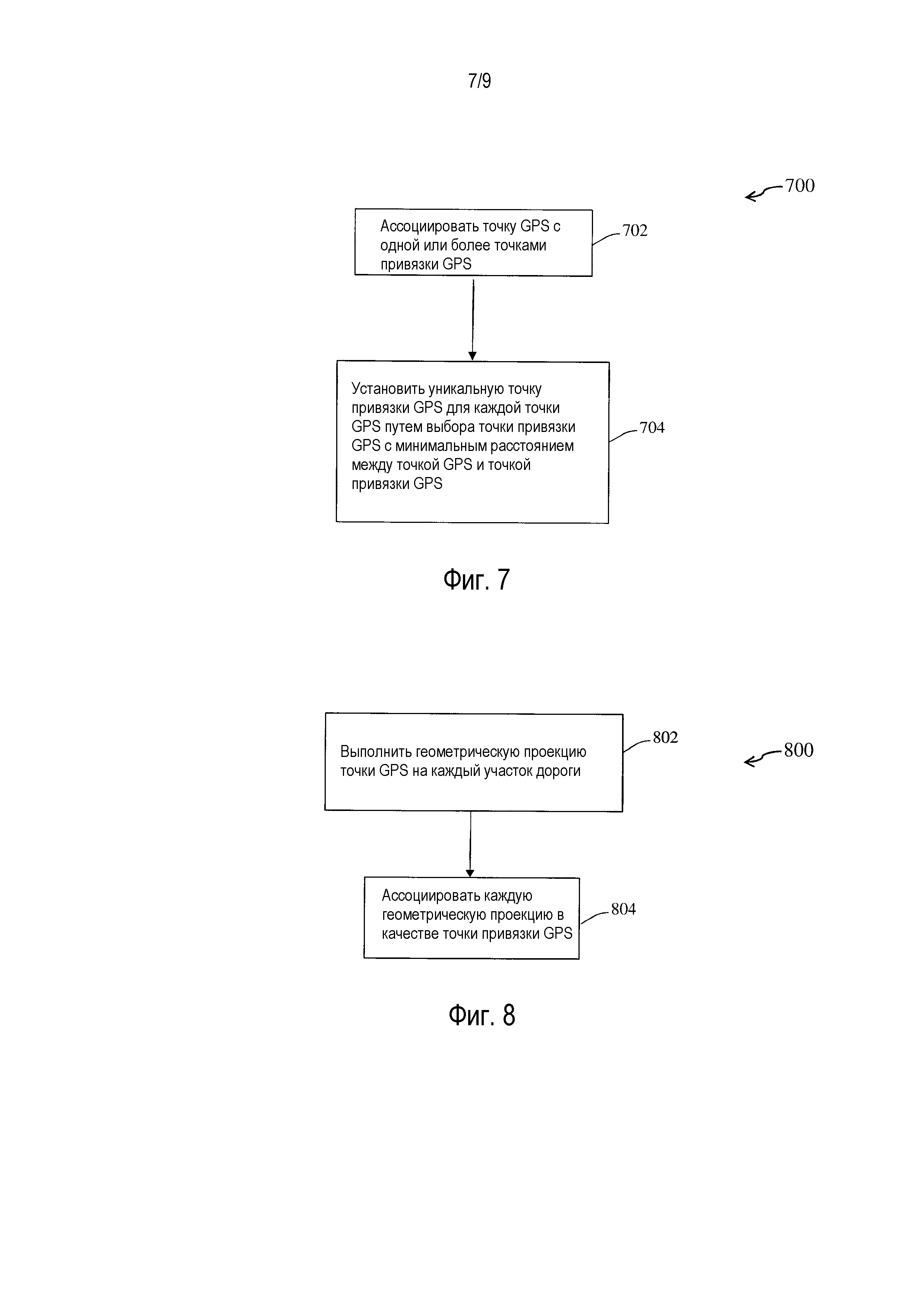
Фиг. 7 - блок-схема способа 700 определения каждой из одной или более уникальных точек привязки GPS для каждой точки GPS из одной или более точек GPS в соответствии с одним или более вариантами осуществления. Способ 700 является вариантом осуществления этапа 606, показанного на Фиг. 6. Способ 700 начинается с этапа 702, на котором каждая из одной или более точек GPS ассоциируется с одной или более точками привязки GPS. В некоторых вариантах осуществления каждая точка привязки GPS из одной или более точек привязки GPS является преобразованием точки GPS из одной или более точек GPS.
На этапе 704 устанавливается каждая из одной или более уникальных точек привязки GPS. В некоторых вариантах осуществления каждая из одной или более уникальных точек привязки GPS устанавливается путем выбора точки привязки GPS из одной или более точек привязки GPS в соответствии со второй релевантной информацией. В некоторых вариантах осуществления вторая релевантная информация содержит минимальное расстояние между каждой точкой GPS из одной или более точек GPS и каждой точкой привязки GPS из одной или более точек привязки GPS.
Фиг. 8 - блок-схема способа 800 ассоциации каждой из одной или более точек GPS с одной или более точками привязки GPS в соответствии с одним или более вариантами осуществления. Способ 800 является вариантом осуществления этапа 702, показанного на Фиг. 7. Способ 800 начинается с этапа 802, на котором выполняется геометрическая проекция каждой точки GPS из одной или более точек GPS на каждый из одного или более участков дороги.
На этапе 804 каждая геометрическая проекция каждой точки GPS из одной или более точек GPS ассоциируется с каждой точкой привязки GPS из одной или более точек привязки GPS.
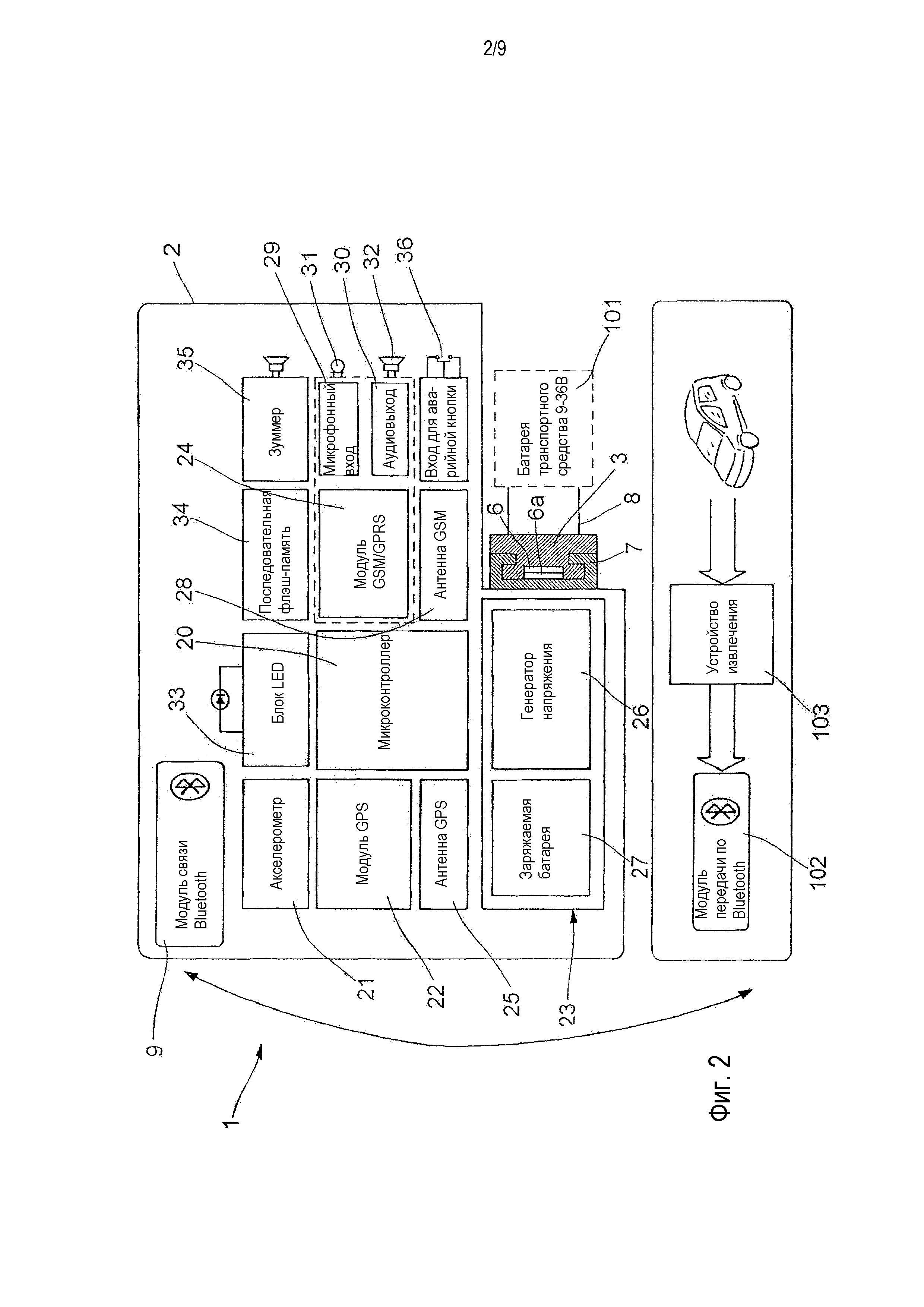
Фиг. 9 - блок-схема способа 900 определения одного или более предполагаемых путей транспортного средства для каждой из одной или более уникальных точек привязки GPS в соответствии с одним или более вариантами осуществления. Способ 900 является вариантом осуществления этапа 608, показанного на Фиг. 6. Способ 900 начинается с этапа 902, на котором способ определения одного или более предполагаемых путей транспортного средства для каждой из одной или более уникальных точек привязки GPS определяет, соприкасается ли каждая из одной или более уникальных точек привязки GPS с одним или более исходными путями. Если способ определения пути транспортного средства определяет, что каждая из одной или более уникальных точек привязки GPS соприкасается с одним или более исходными путями, то работа переходит к этапу 904. Если способ определения пути транспортного средства определяет, что каждая из одной или более уникальных точек привязки GPS не соприкасается с одним или более исходными путями, то работа переходит к этапу 910. В некоторых вариантах осуществления каждый из одного или более исходных путей содержит один или более ранее предполагаемых путей транспортного средства. В некоторых вариантах осуществления один или более ранее предполагаемых путей транспортного средства является предыдущим предполагаемым путем транспортного средства, ассоциированным с другим набором из одной или более точек GPS или другим набором из одной или более уникальных точек привязки GPS.
На этапе 904 формируется один или более предполагаемых путей транспортного средства. В некоторых вариантах осуществления один или более предполагаемых путей транспортного средства содержат один или более исходных путей. В некоторых вариантах осуществления каждый из одного или более предполагаемых путей транспортного средства ассоциирован с соответствующим элементом одной или более стоимостей.
В некоторых вариантах осуществления соответствующий элемент одной или более стоимостей для каждого предполагаемого пути транспортного средства из одного или более предполагаемых путей транспортного средства содержит сумму одного или более расстояний. В некоторых вариантах осуществления каждое расстояние из одного или более расстояний является расстоянием между каждой из точек GPS из одной или более точек GPS и каждой из соответствующих уникальных точек привязки GPS из одной или более уникальных точек привязки GPS, содержащихся на каждом из одного или более предполагаемых путей транспортного средства. В некоторых вариантах осуществления соответствующий элемент одной или более стоимостей для каждого предполагаемого пути транспортного средства из одного или более предполагаемых путей транспортного средства является вычисленной ошибкой для каждого из одного или более предполагаемых путей.
На этапе 906 один или более предполагаемых путей транспортного средства ранжируются в соответствии с третьей релевантной информацией. В некоторых вариантах осуществления третья релевантная информация содержит соответствующий элемент одной или более стоимостей, ассоциированный с каждым предполагаемым путем транспортного средства из одного или более предполагаемых путей транспортного средства. В некоторых вариантах осуществления вычисленная ошибка минимизируется путем ранжирования одного или более предполагаемых путей транспортного средства в соответствии с вычисленной ошибкой и выбора одного или более путей, ассоциированных с минимальной вычисленной ошибкой (например, этап 612 по Фиг. 6).
На этапе 908 способ определения одного или более предполагаемых путей транспортного средства для каждой из одной или более уникальных точек привязки GPS определяет, есть ли еще уникальные точки привязки GPS. Если способ определения одного или более предполагаемых путей транспортного средства для каждой из одной или более уникальных точек привязки GPS определяет, что есть еще уникальные точки привязки GPS, то работа переходит к этапу 902. Если способ определения одного или более предполагаемых путей транспортного средства для каждой из одной или более уникальных точек привязки GPS определяет, что больше нет уникальных точек привязки GPS, то работа переходит к этапу 910.
На этапе 910 отображается один или более предполагаемых путей транспортного средства. В некоторых вариантах осуществления система 502 сопоставления с картой отображает один или более предполагаемых путей транспортного средства в оперативном центре 300.
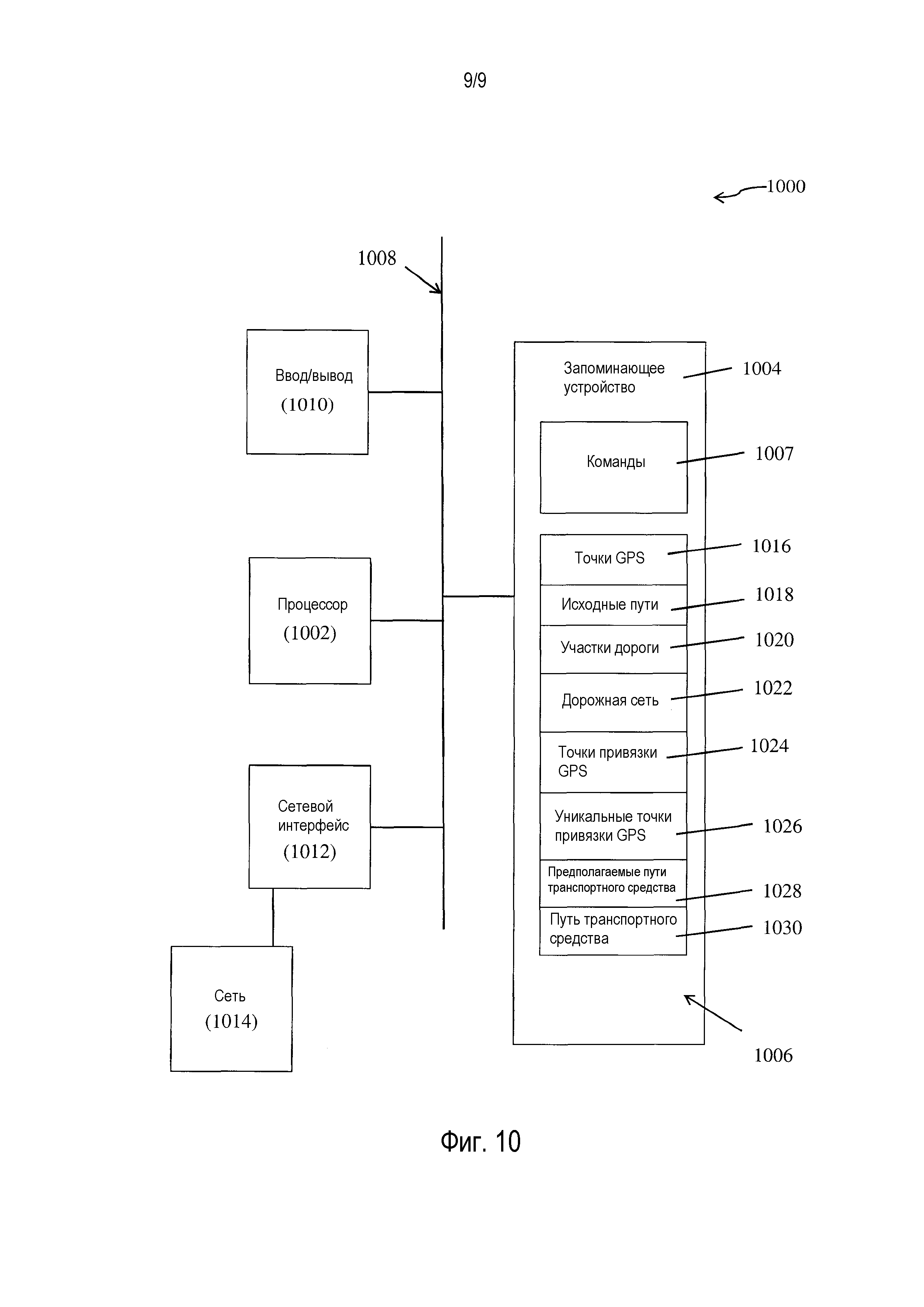
Фиг. 10 - блок-схема системы 1000 сопоставления с картой для определения пути транспортного средства в соответствии с одним или более вариантами осуществления. В некоторых вариантах осуществления система 1000 сопоставления с картой является вариантом осуществления системы 502 сопоставления с картой, показанной на Фиг. 5. В некоторых вариантах осуществления система 1000 сопоставления с картой является универсальным вычислительным устройством, которое реализует способ 600 по Фиг. 6, способ 700 по Фиг. 7, способ 800 по Фиг. 8 или способ 900 по Фиг. 900 в соответствии с одним или более вариантами осуществления. Система 1000 сопоставления с картой включает в себя аппаратный процессор 1002 и постоянный машиночитаемый носитель 1004 информации, кодированный кодом 1006 компьютерной программы (то есть хранящий его), то есть набором исполняемых команд. Машиночитаемый носитель 1004 информации также кодируется командами 1007 для взаимодействия с оперативным центром 500. Процессор 1002 электрически соединяется с машиночитаемым носителем 1004 информации посредством шины 1008. Также процессор 1002 электрически соединяется с интерфейсом 1010 ввода/вывода с помощью шины 1008. Сетевой интерфейс 1012 также электрически соединен с процессором 1002 посредством шины 1008. Сетевой интерфейс 1012 соединен с сетью 1014, чтобы процессор 1002 и машиночитаемый носитель 1004 информации могли соединяться с внешними элементами по сети 1014. Процессор 1002 выполнен с возможностью исполнения кода 1006 компьютерной программы, кодированного на машиночитаемом носителе 1004 информации, чтобы система 1000 сопоставления с картой использовалась для выполнения части или всех этапов, которые описаны, например, в способе 600, способе 700, способе 800 или способе 900.
В одном или более вариантах осуществления процессор 1002 является центральным процессором (CPU), многопроцессорной системой, системой распределенной обработки, специализированной интегральной схемой (ASIC) и/или подходящим блоком обработки.
В одном или более вариантах осуществления машиночитаемый носитель 1004 информации является электронной, магнитной, оптической, электромагнитной, инфракрасной и/или полупроводниковой системой (или устройством). Например, машиночитаемый носитель 1004 информации включает в себя полупроводниковое или твердотельное запоминающее устройство, магнитную ленту, сменную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и/или оптический диск. В одном или более вариантах осуществления, использующих оптический диск, машиночитаемый носитель 1004 информации включает в себя постоянное запоминающее устройство на компакт-диске (CD-ROM), читаемый/записываемый компакт-диск (CD-R/W) и/или цифровой универсальный (DVD).
В одном или более вариантах осуществления носитель 1004 информации хранит код 1006 компьютерной программы, выполненный с возможностью побуждения системы 1000 сопоставления с картой выполнить способ 600, способ 700, способ 800 или способ 900. В одном или более вариантах осуществления носитель 1004 информации также хранит информацию, нужную для выполнения способа 600, способа 700, способа 800 или способа 900, а также информацию, сформированную во время выполнения способа 600, способа 700, способа 800 или способа 900, например точки 1016 GPS, исходные пути 1018, участки 1020 дороги, дорожную сеть 1022, точки 1024 привязки GPS, уникальные точки 1026 привязки GPS, предполагаемые пути 1028 транспортного средства и путь 1030 транспортного средства, и/или набор исполняемых команд для выполнения работы в способе 600, способе 700, способе 800 или способе 900.
В одном или более вариантах осуществления носитель 1004 информации хранит команды 1007 для взаимодействия с внешними машинами. Команды 1007 дают процессору 1002 возможность сформировать команды, читаемые внешними машинами, чтобы эффективно реализовать способ 600, способ 700, способ 800 или способ 900 во время процесса определения пути транспортного средства.
Система 1000 сопоставления с картой включает в себя интерфейс 1010 ввода/вывода. Интерфейс 1010 ввода/вывода соединяется с внешними схемами. В одном или более вариантах осуществления интерфейс 1010 ввода/вывода включает в себя клавиатуру, клавишную панель, мышь, шаровой манипулятор, сенсорную площадку, сенсорный экран и/или клавиши управления курсором для передачи информации и команд процессору 1002.
Система 1000 сопоставления с картой также включает в себя сетевой интерфейс 1012, соединенный с процессором 1002. Сетевой интерфейс 1012 позволяет системе 1000 обмениваться информацией с сетью 1014, с которой соединена одна или более других компьютерных систем. Сетевой интерфейс 1012 включает в себя интерфейсы беспроводных сетей, например Bluetooth, WiFi, WiMAX, GPRS или WCDMA; или интерфейсы проводных сетей, например Ethernet, USB или IEEE-1394. В одном или более вариантах осуществления способ 600, способ 700, способ 800 или способ 900 реализуются в двух или более системах 1000, и информация, например точки 1016 GPS, исходные пути 1018, участки 1020 дороги, дорожная сеть 1022, точки 1024 привязки GPS, уникальные точки 1026 привязки GPS, предполагаемые пути 1028 транспортного средства и путь 1030 транспортного средства, обменивается между разными системами 1000 по сети 1014.
Система 1000 выполнена с возможностью приема информации, связанной с одной или более точками 1016 GPS, посредством интерфейса 1010 ввода/вывода. Информация передается процессору 1002 по шине 1008 для формирования одной или более точек 1016 GPS. Одна или более точек 1016 GPS затем сохраняются на машиночитаемом носителе 1004 в качестве точек 1016 GPS. Система 1000 выполнена с возможностью приема информации, связанной с одним или более исходными путями 1018, посредством интерфейса 1010 ввода/вывода. Информация передается процессору 1002 по шине 1008 для формирования одного или более исходных путей 1018. Один или более исходных путей 1018 затем сохраняются на машиночитаемом носителе 1004 в качестве исходных путей 1018. Система 1000 сопоставления с картой выполнена с возможностью приема информации, связанной с одним или более участками 1020 дороги, посредством интерфейса 1010 ввода/вывода. Информация сохраняется на машиночитаемом носителе 1004 в качестве участков 1020 дороги. Система 1000 сопоставления с картой выполнена с возможностью приема информации, связанной с одной или более дорожными сетями, посредством интерфейса 1010 ввода/вывода. Информация сохраняется на машиночитаемом носителе 1004 в качестве дорожной сети 1022. Система 1000 сопоставления с картой выполнена с возможностью приема информации, связанной с одной или более точками привязки GPS, посредством интерфейса 1010 ввода/вывода. Информация сохраняется на машиночитаемом носителе 1004 в качестве точки 1024 привязки GPS. Система 1000 сопоставления с картой выполнена с возможностью приема информации, связанной с одной или более уникальными точками привязки GPS, посредством интерфейса 1010 ввода/вывода. Информация сохраняется на машиночитаемом носителе 1004 в качестве уникальных точек 1026 привязки GPS. Система 1000 сопоставления с картой выполнена с возможностью приема информации, связанной с одним или более предполагаемыми путями транспортного средства, посредством интерфейса 1010 ввода/вывода. Информация сохраняется на машиночитаемом носителе 1004 в качестве предполагаемых путей 1028 транспортного средства. Система 1000 сопоставления с картой выполнена с возможностью приема информации, связанной с путем транспортного средства, посредством интерфейса 1010 ввода/вывода. Информация сохраняется на машиночитаемом носителе 1004 в качестве пути 1030 транспортного средства.
Специалисту в данной области техники будет понятно, что порядок этапов в способе 600, способе 700, способе 800 или способе 900 является регулируемым. Кроме того, специалисту в данной области техники будет понятно, что в способ 600, способ 700, способ 800 или способ 900 можно включить дополнительные этапы без отклонения от объема этого описания.
Специалисту в данной области техники будет с легкостью понятно, что раскрытые варианты осуществления реализуют одно или более изложенных выше преимуществ. После прочтения вышеприведенного описания изобретения специалист в данной области техники сможет предусмотреть различные изменения, эквивалентные замены и различные другие варианты осуществления, которые в общих чертах раскрыты в этом документе. Поэтому подразумевается, что обеспечиваемая правовая охрана ограничивается только определением, содержащимся в прилагаемой формуле изобретения и ее эквивалентах.
Один аспект данного описания относится к способу описания стиля вождения у водителя транспортного средства, содержащему определение пути водителя транспортного средства с помощью процессора, определение одного или более значений средней скорости у водителя транспортного средства по меньшей мере из пути транспортного средства, определение количества раз, которое одно или более значений средней скорости у водителя транспортного средства превышают среднюю скорость транспортного средства в одном или более направлениях, и описание стиля вождения у водителя транспортного средства по меньшей мере из одного или более значений средней скорости у водителя транспортного средства. Определение пути водителя транспортного средства содержит загрузку одной или более точек GPS или одного или более исходных путей, выполнение поиска в диапазоне для каждой точки GPS из одной или более точек GPS, определение одной или более уникальных точек привязки GPS для каждой точки GPS из одной или более точек GPS, определение одного или более предполагаемых путей транспортного средства для каждой уникальной точки привязки GPS из одной или более уникальных точек привязки GPS и определение пути транспортного средства из одного или более предполагаемых путей транспортного средства, причем путь транспортного средства является путем водителя транспортного средства. Кроме того, каждая уникальная точка привязки GPS из одной или более уникальных точек привязки GPS является преобразованием соответствующей точки GPS из одной или более точек GPS. Поиск в диапазоне определяет один или более участков дороги в диапазоне каждой точки GPS из одной или более точек GPS. Также каждый исходный путь из одного или более исходных путей является соединением одного или более исходных участков дороги в дорожной сети.