Результат интеллектуальной деятельности: МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ
Вид РИД
Изобретение
Изобретение относится к радиолокационной технике и может быть использовано при построении вращающихся многофункциональных радиолокационных станций (РЛС) дальнего обнаружения целей с электронным сканированием луча для обзора воздушного пространства и одновременного точного сопровождения целей.
Класс вращающихся радиолокационных систем с электронным сканированием появился для обеспечения одним радиолокатором функции непрерывного обзора пространства, обнаружения целей и функции одновременного точного сопровождения целей (Д.А. Атингтон, П.Дж. Карилас, Дж.Д. Райт «Многофункциональные вращающиеся РЛС с электронным сканированием для обзора воздушного пространства», ТИИЭР, том 73, №2, февраль, 1985, М., Мир.
Перспективные РЛС должны обладать высокими характеристиками для эффективного решения задач разведки воздушной обстановки и контроля воздушного пространства при работе по перспективным средствам воздушно-космического нападения (СВКН) и необходимы для быстрой и точной оценки изменяющейся воздушной обстановки и точного сопровождения целей.
Эти требования во многом противоречивы (например, большие дальности обнаружения и точное сопровождение современных и перспективных СВКН при высокой мобильности РЛС). Разрешение этого противоречия может заключаться в объединении в одном комплексе радиолокационных средств разного диапазона волн.
Так, например, РЛС метрового диапазона имеют значительные дальности обнаружения всех типов воздушных целей, в том числе малоразмерных и малозаметных (выполненных по технологии «Стелс»), независимо от метеоусловий, однако отличаются низкой разрешающей способностью и недостаточной точностью измерения угловых координат целей (особенно по углу места), что не позволяет осуществлять точное сопровождение целей.
РЛС, работающие в более коротковолновом диапазоне, например в дециметровом, отличаются высокоточным измерением угловых координат целей, однако имеют значительно меньшие дальности обнаружения за счет меньшей площади антенны и меньших значений эффективной площади рассеяния (ЭПР) целей в этом диапазоне, а также имеют значительную зависимость технических характеристик от погодных условий.
Известно построение двухдиапазонного радиолокационного комплекса (РЛК), в котором значительные зоны обнаружения малоразмерных и малозаметных целей, в том числе выполненных по технологии «Стеле», реализованы благодаря электронному сканированию и взаимодействию РЛС разного диапазона волн (патент РФ №2346291). В данном РЛК обзор пространства осуществляется РЛС метрового диапазона волн, а сопровождение целей возлагается на РЛС дециметрового диапазона волн при работе по целеуказанию от РЛС метрового диапазона волн.
Однако этот РЛК содержит два радиолокационных модуля, модуль управления, модули наземного радиозапросчика и вторичного радиолокатора, что приводит к значительному увеличению числа транспортных единиц и удорожанию РЛК.
Известна также мобильная РЛС кругового обзора метрового диапазона волн средних и больших высот дежурного режима с электронным сканированием луча по углу места, имеющая значительные зоны обнаружения малоразмерных и малозаметных целей (патент ЕПВ №007941), которая размещена на одном транспортном средстве и выбрана по технико-экономическим характеристикам и назначению в качестве ближайшего аналога (прототипа).
РЛС-прототип состоит из антенно-мачтового устройства (АМУ), на котором расположены основная и компенсационная антенны, антенны наземного радиозапросчика (НРЗ) и телекодового канала связи, а также приемно-передающего устройства (включающего диаграммообразующее устройство), устройства первичной и вторичной обработки, отображения, управления и контроля, ориентирования и топопривязки, развертывания и свертывания.
Основная антенна выполнена в виде фазированной антенной решетки (ФАР) с приемопередающими модулями (ППМ), устройства первичной и вторичной обработки, отображения, управления и контроля выполнены на основе специальной цифровой вычислительной машины (СЦВМ). Для размещения перечисленных составных частей РЛС используется одно транспортное средство, что обеспечивает ее относительно небольшую стоимость.
РЛС-прототип осуществляет измерение наклонной дальности цели, ее азимута (при круговом вращении антенны) и (в пределах от 5 до 45°) угла места за счет электронного сканирования диаграммы направленности антенны в вертикальной плоскости.
Основным недостатком прототипа являются низкие точность измерения угловых координат и угловая разрешающая способность (в мобильной РЛС метрового диапазона невозможно реализовать антенну с достаточными вертикальными и горизонтальными размерами), что не позволяет осуществить точное сопровождение цели. Другим его недостатком является низкая надежность (время наработки на отказ), связанная с наличием высокочастотного токосъемника.
Кроме того, общим недостатком указанных аналога и прототипа является незащищенность боевого расчета от воздействия электромагнитного излучения и поражения высокоточным оружием, наводящимся по излучению РЛС, т.к. рабочие места операторов (РМО) этих РЛС располагаются на платформах с излучающими антеннами (либо антеннами НРЗ, либо локационными).
Достигаемый технический результат предлагаемого изобретения заключается в улучшении технико-эксплуатационных характеристик РЛС, таких как угловые точность и разрешающая способность, а также безопасность боевого расчета и надежность при сравнительно недорогой реализации мобильной РЛС.
Указанный технический результат достигнут за счет того, что в известную РЛС, содержащую радиолокационный канал дальномера метрового диапазона в составе антенны, приемно-передающего устройства и устройства первичной обработки, а также антенну НРЗ, антенну устройства ориентирования и топопривязки, устройство отображения, управления и контроля и устройство связи с потребителем, в которой дальномер вместе с антеннами НРЗ и устройства ориентирования и топопривязки входит в антенно-аппаратный комплекс, размещенный на первом транспортном средстве и включающий антенно-мачтовое устройство (АМУ), расположенное на вращающейся части ОПУ транспортного средства, гидравлическую систему свертывания-развертывания, при помощи которой АМУ в транспортном положении укладывают на платформу транспортного средства, и аппаратный контейнер (АК), дополнительно введены радиолокационный канал высотомера дециметрового диапазона в составе антенны, приемно-передающего устройства и устройства первичной обработки, устройство управления, контроля и передачи радиолокационной информации, устройство обобщенной вторичной обработки, и кабина управления, размещенная на втором транспортном средстве, при этом аппаратный контейнер расположен, как и АМУ, на вращающейся части ОПУ первого транспортного средства.
На фигуре представлена структурная схема предлагаемой мобильной трехкоординатной РЛС, которая состоит из антенно-аппаратного комплекса (ААК) 1, размещенного на первом транспортном средстве и включающего антенно-мачтовое устройство (АМУ) 2 и аппаратный контейнер (АК) 3, и кабины управления (КУ) 13.
АМУ 2 расположено на вращающейся части опорно-поворотного устройства (ОПУ) транспортного средства и включает в себя антенны канала дальномера (АД) 4 метрового диапазона длин волн и наземного радиозапросчика (АНРЗ) 7, направленные в одну и ту же сторону, антенну многофункционального радионавигационного комплекса (АМРК) 9, а также антенну канала высотомера (АВ) 10 дециметрового диапазона длин волн, развернутую на 180° относительно АД 4, и его приемно-передающее устройство (ППУВ) 11. Все антенны закреплены на вертикальной мачте АМУ 2.
АК 3 включает в себя приемно-передающее устройство и устройство первичной обработки канала дальномера (соответственно ППУД 5 и УПОД 6), устройство первичной обработки канала высотомера (УПОВ) 12, устройство управления, контроля и передачи радиолокационной информации (УУКПИ) 8 и расположен, как и АМУ 2, на вращающейся части ОПУ первого транспортного средства. При этом отпадает необходимость в высокочастотном токосъемнике (для связи АК 3 с АМУ 2), который является одним из основных источников ухудшения надежной работы РЛС-прототипа, а также увеличивает его стоимость.
КУ 13 расположена на втором транспортном средстве, удаленном от ААК 1 на расстояние до 300 м, и включает в себя устройство отображения, управления и контроля (УОУК) 14, устройство обобщенной вторичной обработки (УОВО) 15 и устройство связи с потребителями (УСП) 16.
Удаленность кабины управления, где находится боевой расчет, от излучающей части РЛС и возможность ее маскировки повышают защиту персонала от воздействия электромагнитного излучения и поражения высокоточным оружием, наводящимся по излучению РЛС, что является дополнительным преимуществом предлагаемой РЛС по сравнению с прототипом.
Как показано на структурной схеме предлагаемой РЛС, вход-выход АД 4 через первый и третий входы-выходы ППУД 5 соединен с первым входом-выходом УПОД 6, вход-выход АВ 10 через первый и третий входы-выходы ППУВ 11 соединен с первым входом-выходом УПОВ 12, вход УУКПИ 8 соединен с выходом АМРК 9, выход - с входом ППУВ 11, входы-выходы 1, 2, 3, 4, 5 и 6 УУКПИ 8 соединены соответственно со вторым входом-выходом ППУД 5, вторым входом-выходом УПОД 6, входом-выходом АНРЗ 7, вторым входом-выходом ППУВ 11, вторым входом-выходом УПОВ 12 и первым входом-выходом УОВО 15, второй вход-выход которого соединен с входом-выходом УОУК 14, а выход - со входом УСП 16, выход которого является выходом РЛС.
На структурной схеме для упрощения не показаны устройства электроснабжения, вращения, синхронизации и гидравлической системы свертывания-развертывания РЛС.
Антенны дальномера АД 4 и высотомера АВ 10 являются твердотельными антенными фазированными решетками с электронным сканированием по углу места. Одними из их основных элементов являются приемопередающие модули (ППМ), состоящие из усилителей мощности и малошумящих усилителей.
ППУД 5 и ППУВ 11 содержат диаграммообразующие устройства, обеспечивающие в своих каналах необходимое амплитудно-фазовое распределение сигналов при их приеме и передаче, а также электронное сканирование в угломестной плоскости.
УПОД 6 и УПОВ 12 выполнены на основе специализированных цифровых вычислительных машин (СЦВМ), осуществляющих первичную обработку принятых сигналов, а также управление диаграммообразованием.
УУКПИ 8 включает в себя аппаратуру определения государственной принадлежности, в качестве которой используется наземный радиолокационный запросчик (НРЗ), приемник навигационной аппаратуры МРК, с помощью которой осуществляется ориентирование и топогеодезическая привязка РЛС, аппаратуру управления, контроля работы РЛС и передачи радиолокационной информации на УОВО 15. В нем с помощью ЭМВ программным способом реализуются задачи управления НРЗ, ориентирования и топогеодезической привязки РЛС, управления режимами работы и автоматизированного контроля аппаратуры РЛС (по входам-выходам 1, 2, 3, 4, 5, и 6), а также передачи первичной радиолокационной информации с дальномера и высотомера на УОВО 15.
ААК 1 является необслуживаемым в процессе боевой работы, персонал находится в кабине управления КУ 13, где располагаются рабочие места операторов (РМО).
УОУК 14 и УОВО 15 размещены в РМО и выполнены на основе специализированных ЭВМ, которые программным способом реализуют задачи отображения информации, управления режимами работы РЛС и системой автоматизированного контроля (в УОУК 14), а также вторичной обработки обобщенной информации (дальномера, НРЗ и высотомера), сопряжение с УСП 16, через которую осуществляется связь с комплексами средств автоматизации (КСА) и другими внешними абонентами РЛС (в УОВО 15).
УСП 16 включает в себя аппаратуру сопряжения по телекодовым каналам связи с КСА в виде аппаратуры передачи данных и аппаратуру оперативно-командной связи.
Предлагаемая РЛС работает следующим образом.
В СЦВМ УПОД 6 и УПОВ 12 на промежуточной частоте программным способом формируются импульсы зондирующего сигнала, которые в «своих» ППУ преобразуются в импульсы высокой частоты и подаются на входы АД 4 и АВ 10 соответственно.
В приемно-передающих устройствах ППУД 5 и ППУВ 11, на соответствующей высокой частоте осуществляется фазирование ППМ на передачу и прием и электронное сканирование по углу места с помощью диаграммообразующего устройства, а также преобразование принятых сигналов с высокой частоты на промежуточную. Затем в УПОД 6 и УПОВ 12 при помощи «своих» СЦВМ производится аналого-цифровое преобразование (АЦП) принятых сигналов, а также программным способом реализуются необходимые алгоритмы первичной обработки принятых сигналов, такие как фазово-амплитудная подстройка приемных и передающих трактов, автокомпенсация шумовых активных помех, формирование сигналов угломестных приемных лучей, защита от несинхронных импульсных помех, защита от пассивных помех, сжатие импульса, накопление азимутальной пачки сигналов, подавление боковых лепестков, измерение дальности, азимута и угла места целей, обнаружение и пеленгация постановщиков активных помех и другие.
Выходная информация УПОД 6 и УПОВ 12 о координатах обнаруженных целей, информация об их государственной принадлежности, а также информация о техническом состоянии аппаратуры РЛС через вход-выход 6 УУКПИ 8 передается на вход-выход 1 УОВО 15, где происходит формирование трасс целей, распознавание их классов, отождествление сигналов государственной принадлежности с трассами. Эта информация через УСП 16 передается внешним абонентам, а также отображается на экранах УОУК 14, входящего в РМО, с пульта которого осуществляется управление режимами работы РЛС и контроль ее технического состояния.
Каналы дальномера и высотомера работают в режиме кругового обзора с механическим вращением антенны. Канал дальномера обеспечивает большие дальности обнаружения, а также определение координат дальности и азимута и грубое измерение угла места целей.
Основной режим работы канала высотомера - работа по целеуказанию, когда он лучом шириной по азимуту и углу места порядка 3° облучает только те точки зоны обзора, в которых дальномером обнаружены цели, и решает задачу точного измерения координат (в первую очередь - угла места) и досопровождения в области ионосферы до углов места 50°, где в дальномере проводка цели будет неустойчивой.
Целеуказание для режима сопровождения формируется в УОВО 15 по результатам обобщенной вторичной обработки информации, поступающей с УПОД 6 и УПОВ 12 каналов дальномера и высотомера через УУКПИ 8, и выдается через вход-выход 6 и выход УУКПИ 8 на вход ППУВ 11.
Кроме того, канал высотомера может работать в режиме регулярного обзора (возможна комбинация режимов регулярного обзора и сопровождения, например, через обзор). В режиме регулярного обзора канал высотомера работает как самостоятельная РЛС дециметрового диапазона и решает задачи как обнаружения, так и сопровождения целей с высокоточным измерением трех координат, в том числе в ограниченной зоне малых углов места (ниже кромки диаграммы направленности дальномера). При этом в режиме сопровождения решается задача измерения координат целей за пределами зоны регулярного обзора высостомера, а также осуществляется автономное досопровождение обнаруженных целей, вышедших из зоны устойчивого обнаружения дальномера.
Наличие целеуказания в режиме сопровождения позволяет осуществить концентрацию энергии в высотомере в одном узком луче, за счет чего в РЛС обеспечиваются значительные зоны обнаружения и высокие точности измерения координат при малых энергетических затратах.
Режим сопровождения с концентрацией энергии в узком луче при относительно небольшой мощности передающего устройства высотомера позволяет осуществлять высокоточное измерение координат целей на больших дальностях, получаемых в канале дальномера за счет его более высокого потенциала и больших значений эффективной площади рассеяния (ЭПР) целей в метровом диапазоне волн.
Разделение задач поиска целей и высокоточного сопровождения обнаруженных целей между разными диапазонами позволяет снизить требования к размерам антенн, поскольку перед длинноволновым диапазоном не ставится задача высокоточного измерения угловых координат, а в коротковолновом диапазоне большие дальности работы по целеуказанию от длинноволнового диапазона достигаются за счет концентрации энергии в узком луче при приемлемых размерах антенны и мощности передатчика. Это позволяет разместить дальномер и высотомер на одном транспортном средстве.
Таким образом, введение в известную РЛС, содержащую радиолокационный канал дальномера метрового диапазона, который входит в ААК, размещенный на первом транспортном средстве и включает АМУ, расположенное на вращающейся части ОПУ транспортного средства, и АК, дополнительно радиолокационного канала высотомера дециметрового диапазона с развернутой на 180° антенной относительно антенны дальномера, входящего в ААК, а также КУ, размещенной на втором транспортном средстве, при этом АК расположен на вращающейся части ОПУ первого транспортного средства, с описанными выше связями, позволило достичь необходимого технического результата, а именно улучшить технико-эксплуатационные характеристики РЛС, такие как угловые точность и разрешающую способность, а также безопасность боевого расчета и надежность при сравнительно недорогой реализации мобильной РЛС, содержащей всего два транспортного средства.
Дополнительно, по сравнению с прототипом, предлагаемая РЛС позволяет:
- обеспечить высокую точность сопровождения малоразмерных и малозаметных целей на больших дальностях;
- увеличить в 2 раза темп сопровождения целей и повысить помехозащищенность от активных помех за счет наличия двух антенн разных диапазонов, развернутых на 180° относительно друг друга;
- увеличить дальность обнаружения целей под нижними углами места;
- расширить зону обзора РЛС по углу места;
- повысить экспортный потенциал.
Указанные технические результаты достигнуты в разработанном, изготовленном и испытанном образце РЛС.
Мобильная трехкоординатная радиолокационная станция (РЛС), содержащая радиолокационный канал дальномера метрового диапазона в составе антенны дальномера (АД), приемно-передающего устройства (ППУД) и устройства первичной обработки (УПОД), антенны наземного радиозапросчика (АНРЗ) и антенны многофункционального радионавигационного комплекса (АМРК), а также устройство отображения, управления и контроля (УОУК) и устройство связи с потребителем (УСП), в которой дальномер вместе с АНРЗ и АМРК входит в антенно-аппаратный комплекс (ААК), размещенный на первом транспортном средстве и включающий антенно-мачтовое устройство (АМУ), которое расположено на вращающейся части опорно-поворотного устройства (ОПУ) транспортного средства и на вертикальной мачте которого закреплены АД, АНРЗ, направленные в одну и ту же сторону, и АМРК, гидравлическую систему свертывания-развертывания, при помощи которой АМУ в транспортном положении укладывают на платформу транспортного средства, и аппаратный контейнер (АК) с входящими в него ППУД и УПОД, при этом вход-выход АД через первый и третий входы-выходы ППУД соединен с первым входом-выходом УПОД, отличающаяся тем, что в нее дополнительно введены радиолокационный канал высотомера дециметрового диапазона в составе антенны высотомера (АВ), приемно-передающего устройства (ППУВ) и устройства первичной обработки (УПОВ), а также устройство управления, контроля и передачи радиолокационной информации (УУКПИ), устройство вторичной обработки (УОВО) сигналов дальномера и высотомера, поступающих через УУКПИ, и кабина управления (КУ), размещенная на втором транспортном средстве, при этом АВ и ППУВ входят в АМУ, АВ развернута на 180° относительно АД и закреплена на вертикальной мачте АМУ, УПОВ и УУКПИ входят в АК, расположенный на вращающейся части ОПУ первого транспортного средства, а УОУК, УОВО и УСП расположены в КУ, причем вход-выход АВ через первый и третий входы-выходы ППУВ соединен с первым входом-выходом УПОВ, вход УУКПИ соединен с выходом АМРК, выход - с входом ППУВ, а входы-выходы 1, 2, 3, 4, 5 и 6 УУКПИ соединены соответственно со вторым входом-выходом ППУД, вторым входом-выходом УПОД, входом-выходом АНРЗ, вторым входом-выходом ППУВ, вторым входом-выходом УПОВ и первым входом-выходом УОВО, второй вход-выход которого соединен с входом-выходом УОУК, а выход - с входом УСП, выход которого является выходом РЛС.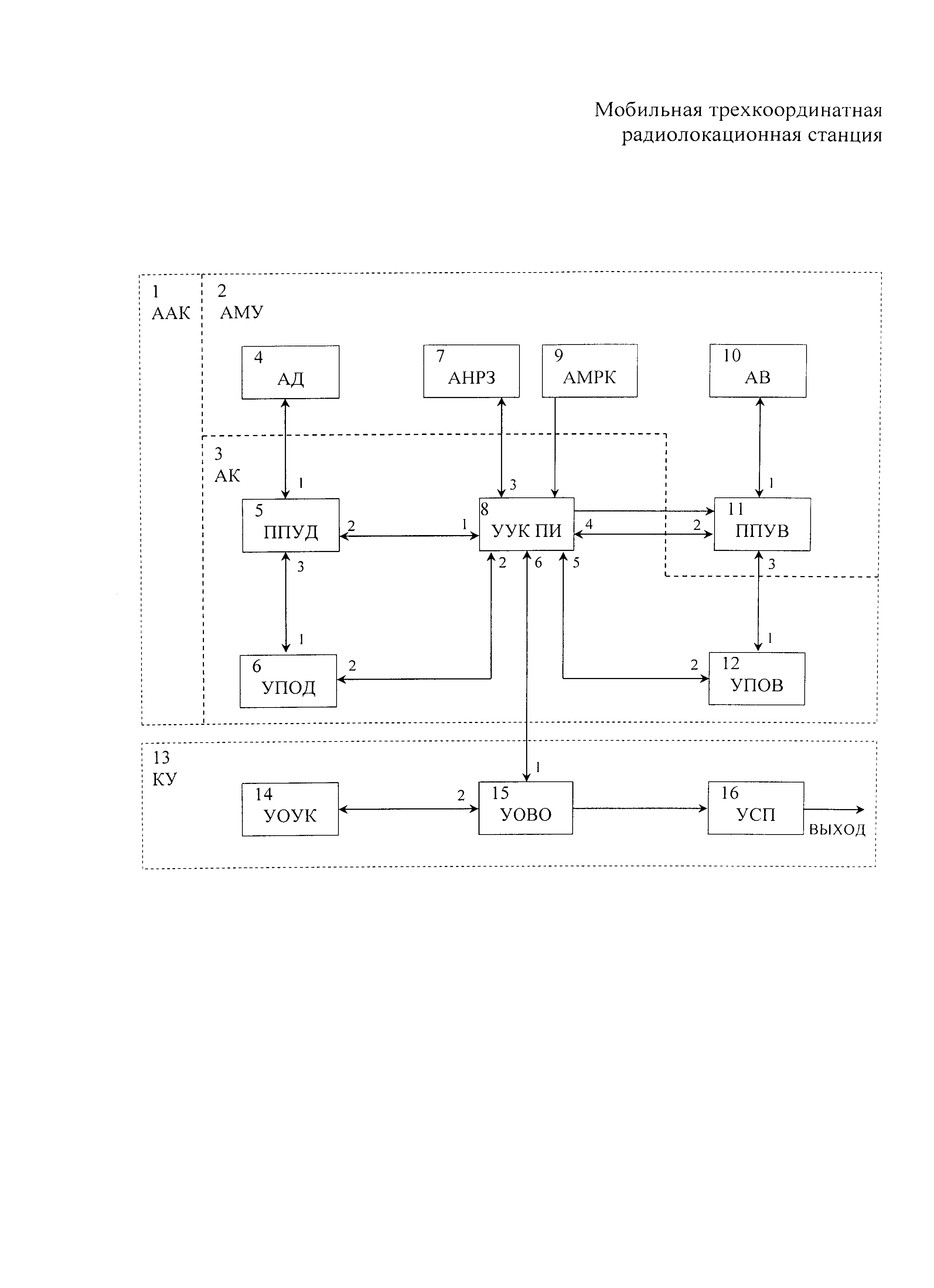
Способ оценки точности геометрической модели местности при ее автоматическом построении
Способ идентификации космических объектов искусственного происхождения в космическом пространстве
Вероятностная спутниковая система для мониторинга лесных пожаров
Способ заряда литий-ионной аккумуляторной батареи
Способ контроля герметичности корпуса космического аппарата
Способ территориального размещения мобильных командно-измерительных приёмопередающих станций
Способ и устройство для калибровки приемно-передающей активной фазированной антенной решетки
Регулятор давления
Устройство для определения местоположения источника электромагнитного излучения
Устройство для мытья колес военной автомобильной техники
Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки
Способ оценки точности геометрической модели местности при ее автоматическом построении
Способ идентификации космических объектов искусственного происхождения в космическом пространстве
Вероятностная спутниковая система для мониторинга лесных пожаров
Способ и устройство определения модуля скорости баллистического объекта с использованием выборки квадратов дальности
Способ радиолокационного сопровождения объектов и рлс для его реализации
Устройство распознавания воздушно-космических объектов в двухдиапазонных радиолокационных комплексах с активными фазированными антенными решетками (афар)
Способ и устройство защиты от "ангелов" при комплексировании рлс разных диапазонов
Способ определения модуля скорости неманеврирующей аэродинамической цели по выборкам измерений дальности
Способ обнаружения и сопровождения воздушных целей радиолокационным комплексом

