ЧАСОВОЙ МЕХАНИЗМ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к часовому механизму, более конкретно к часовому механизму, содержащему подпружиненный балансир. Такие часовые механизмы содержат нижнюю сторону и отображающее средство и могут быть расположены между первой и второй эталонными плоскостями, параллельными друг другу, причем первая эталонная плоскость является касательной к указанной нижней стороне, а вторая эталонная плоскость расположена на стороне указанного отображающего средства. Указанные часовые механизмы содержат кинематический узел, содержащий корпус.
УРОВЕНЬ ТЕХНИКИ
[0002] Корпус содержит колеса, в целом расположенные таким образом, что их оси вращения являются параллельными друг другу и перпендикулярными указанным эталонным плоскостям. Указанные колеса, имеющие дискообразную форму, могут быть расположены друг над другом полностью или частично в зависимости от их положения относительно корпуса. Одно из них, выполненное с возможностью поддерживания органов индикации времени, расположено рядом с второй эталонной плоскостью. Обычно колеса, такие как ассортиментные колеса (включая анкерное колесо, анкерные вилки и двойной ролик), а также осциллятор, установлены непосредственно в кинематическом узле рядом с первой эталонной плоскостью. После установки кинематического узла указанные элементы обычно настраивают, для чего требуется регулировка всего кинематического узла. Эта регулировка является относительно трудновыполнимой и сложной.
[0003] Кроме того, известным является использование наклонного балансира для минимизации неравномерности хода часов. В результате чего сложность выполнения (изготовления и сборки) балансира и ассортиментных колес еще более увеличивается.
[0004] Другие решения сводятся к установке балансира в турбийоне или двойном турбийоне, например, описанном в патенте CH 698622, но конструкция такого типа не является частью изобретения, которое относится к "простым" балансирам, в которых ось балансира устанавливается на элементе корпуса часового механизма, а не элементе корпуса турбийона.
[0005] Кроме того, угол наклона балансира, установленного на корпусе, выбран для минимизации неравномерности хода часов во время их ношения, т.е., когда часы используются и находятся либо на запястье владельца в случае наручных часов, либо в кармане владельца в случае карманных часов.
[0006] Однако часы носят не всегда, например, их не носят ночью, или когда владелец носит другие часы. Из-за большой длительности периода времени, в течение которого положение часов не изменяется, ход часов может измениться. Таким образом, имеется потребность в минимизации неравномерности хода часового механизма также и в те периоды времени, когда часами не пользуются, или когда они остаются в одном и том же положении некоторое количество времени.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0007] Задача настоящего изобретения состоит в создании часового механизма, позволяющего минимизировать изменение хода, когда часами не пользуются или когда они остаются в одном и том же положении длительное время, в результате чего может измениться их ход.
[0008] Настоящее изобретение также позволяет минимизировать неравномерность хода и свести ее до постоянной величины насколько возможно независимо от положения часового механизма, когда им не пользуются, однако без ухудшения неравномерности хода указанного часового механизма во время ношения.
[0009] Согласно одному варианту реализации часовой механизм содержит:
нижнюю сторону и отображающее средство, причем указанный часовой механизм расположен между первой и второй эталонными плоскостями, которые являются параллельными друг другу, при этом первая эталонная плоскость является касательной к указанной нижней стороне, а вторая эталонная плоскость расположена на стороне отображающего средства, причем указанный часовой механизм содержит кинематический узел, содержащий:
корпус;
по меньшей мере два балансира;
по меньшей мере два анкера, соответственно кинематически связанных с балансирами;
по меньшей мере один источник энергии; и
колеса кинематической цепи, соединяющие указанный по меньшей мере один источник энергии с анкером.
[0010] Согласно настоящему изобретению корпус содержит по меньшей мере два органа, расположенные с обеих сторон базисной оси, перпендикулярной первой и второй эталонным плоскостям, причем на каждом из указанных органов установлены балансир и анкер, которые вместе соответственно формируют модульный анкерный механизм, при этом каждый балансир установлен с возможностью поворота вокруг оси вращения соответствующего органа,
и корпус дополнительно содержит по меньшей мере один опорный элемент, имеющий по меньшей мере одну опорную поверхность, на которой расположен по меньшей мере один из указанных модульных анкерных механизмов, так что ось вращения балансира указанного модульного анкерного механизма имеет наклон относительно указанных эталонных плоскостей и пересекает их, причем точка пересечения указанной оси вращения с первой эталонной плоскостью находится ближе к базисной оси, чем точка пересечения указанной оси вращения со второй эталонной плоскостью.
[0011] Согласно одному варианту реализации модульные анкерные механизмы расположены таким образом, что оси вращения их балансиров имеют наклон относительно друг друга.
[0012] Согласно одному варианту реализации корпус может содержать по меньшей мере два опорных элемента, соответственно имеющих опорную поверхность, причем модульные анкерные механизмы расположены соответственно на указанных опорных поверхностях таким образом, что ось вращения каждого балансира имеет наклон относительно указанных эталонных плоскостей и пересекает их, причем точка пересечения соответствующих указанных осей вращения с первой эталонной плоскостью находится ближе к базисной оси, чем точка пересечения указанной оси вращения со второй эталонной плоскостью.
[0013] Предпочтительно опорный элемент содержит опорную поверхность, которая имеет наклон относительно указанных эталонных плоскостей и пересекает их, причем точка пересечения плоскости указанной опорной поверхности с первой эталонной плоскостью находится дальше от базисной оси, чем точка пересечения указанной плоскости опорной поверхности со второй эталонной плоскостью, и на которой расположен модульный анкерный механизм, так что угол между осью вращения его балансира и первой эталонной плоскостью строго меньше 90°.
[0014] Опорный элемент представляет собой мост, закрепленный на плате, или выполнен за одно целое с платой.
[0015] Предпочтительно по меньшей мере один из модульных анкерных механизмов содержит основание, имеющее прямоугольное поперечное сечение.
[0016] Предпочтительно каждый модульный анкерный механизм содержит балансный мост и связанный с ним балансир, установленный между основанием и указанным балансным мостом с возможностью вращения, и каждый модульный анкерный механизм содержит по меньшей мере один анкерный мост и связанный с ним анкер, установленный между основанием и указанным анкерным мостом с возможностью вращения.
[0017] Согласно одному варианту реализации оси вращения колес кинематической цепи могут иметь наклон относительно эталонных плоскостей.
[0018] Согласно другому варианту реализации оси вращения колес кинематических цепей могут быть перпендикулярными эталонным плоскостям.
[0019] Предпочтительно указанный по меньшей мере один источник энергии может быть образован по меньшей мере одним барабаном, причем каждый балансир и указанный барабан имеют наклон относительно эталонных плоскостей и относительно друг друга.
[0020] Для минимизации неравномерности хода между различными положениями часового механизм при наличии балансира с достаточно большим диаметром, обеспечивающим достаточный момент инерции для улучшения качества регулирования кинематического узла, ось вращения по меньшей мере одного балансира образует с перпендикуляром к эталонным плоскостям угол между 10° и 80°, предпочтительно между 30° и 60°.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] Изобретение может быть более понятным после прочтения следующего описания вариантов реализации настоящего изобретения, приведенных в качестве примера, и ознакомления с сопроводительными чертежами, на которых:
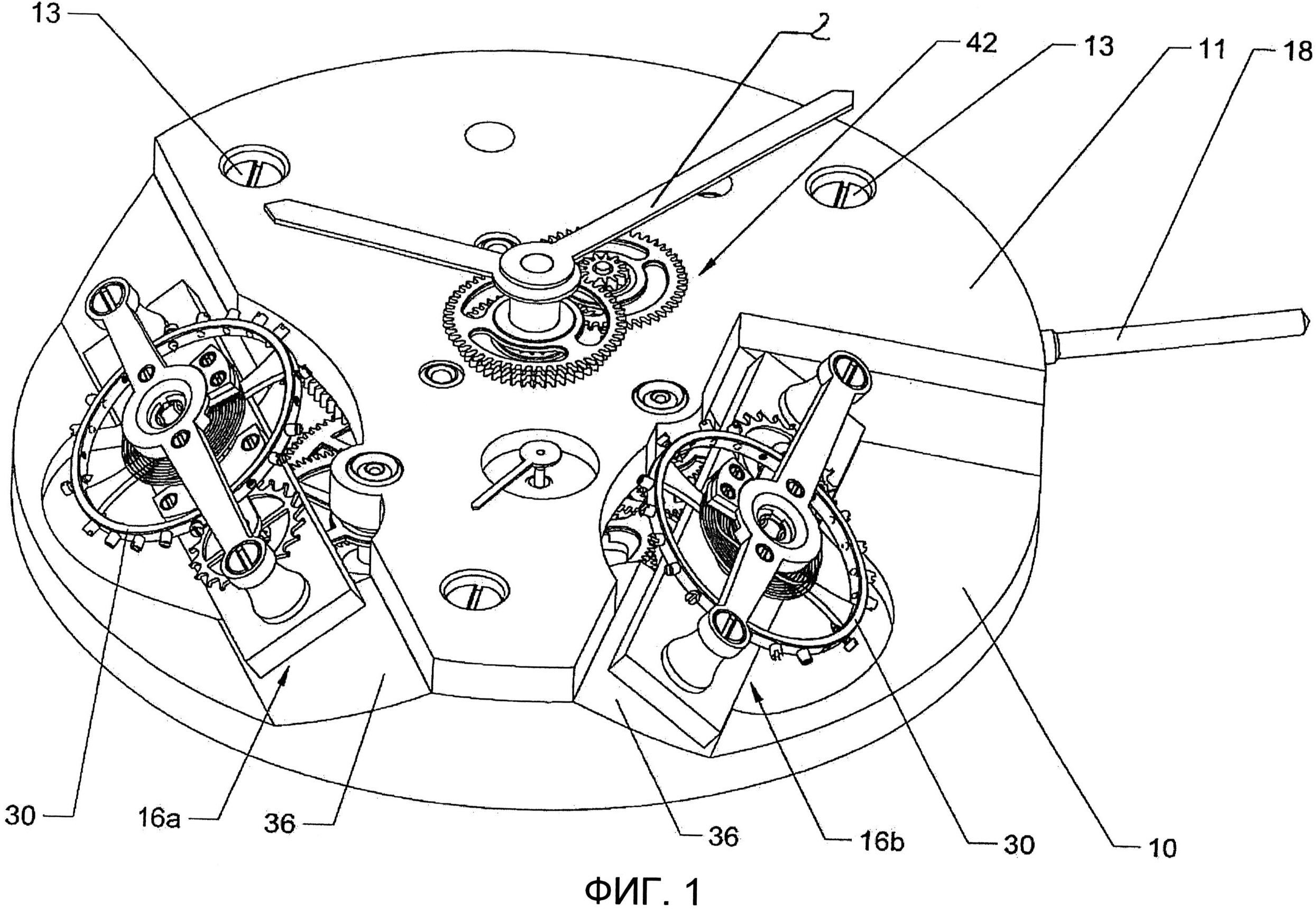
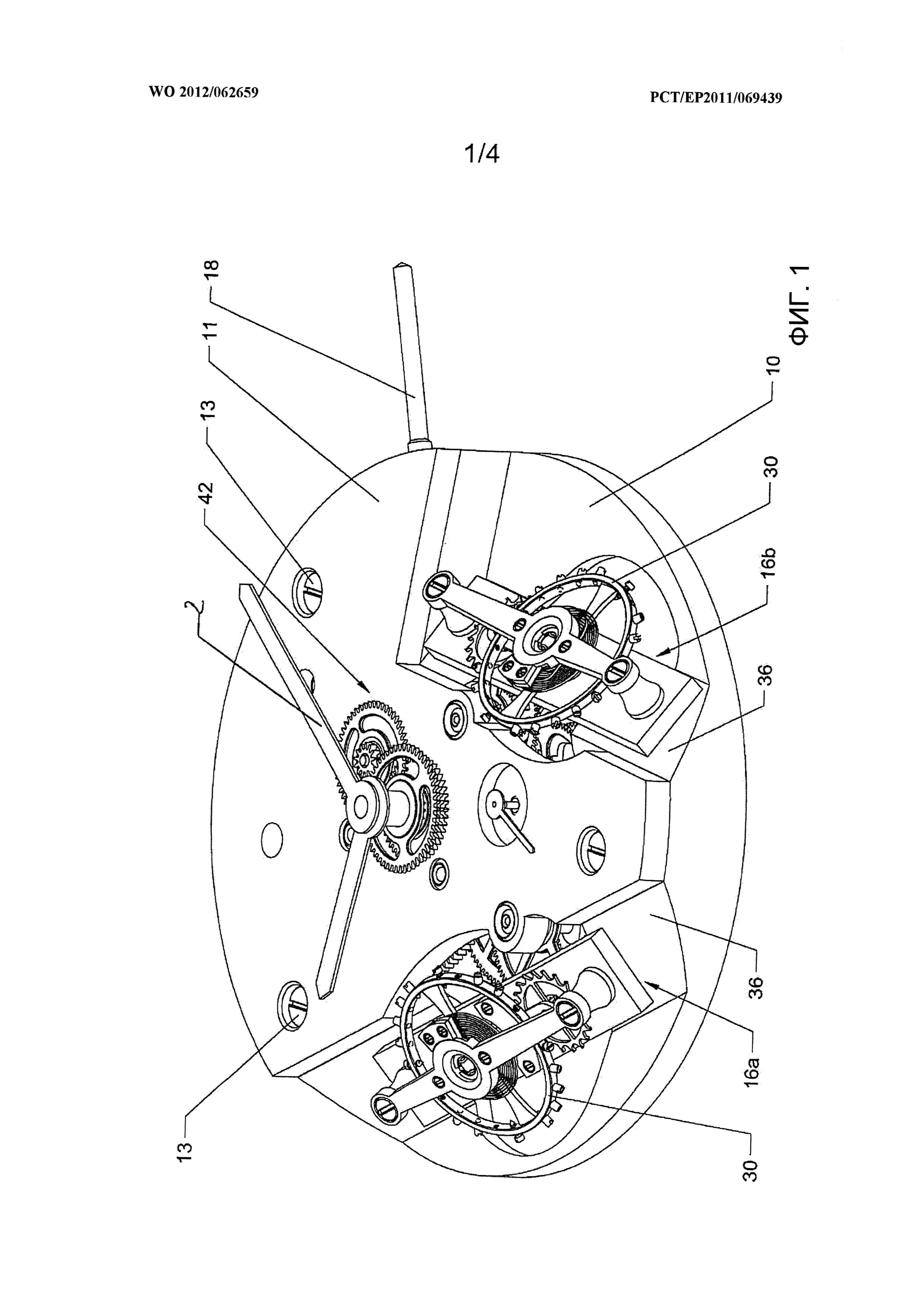
на фиг.1 показан перспективный вид кинематического узла часового механизма согласно настоящему изобретению;
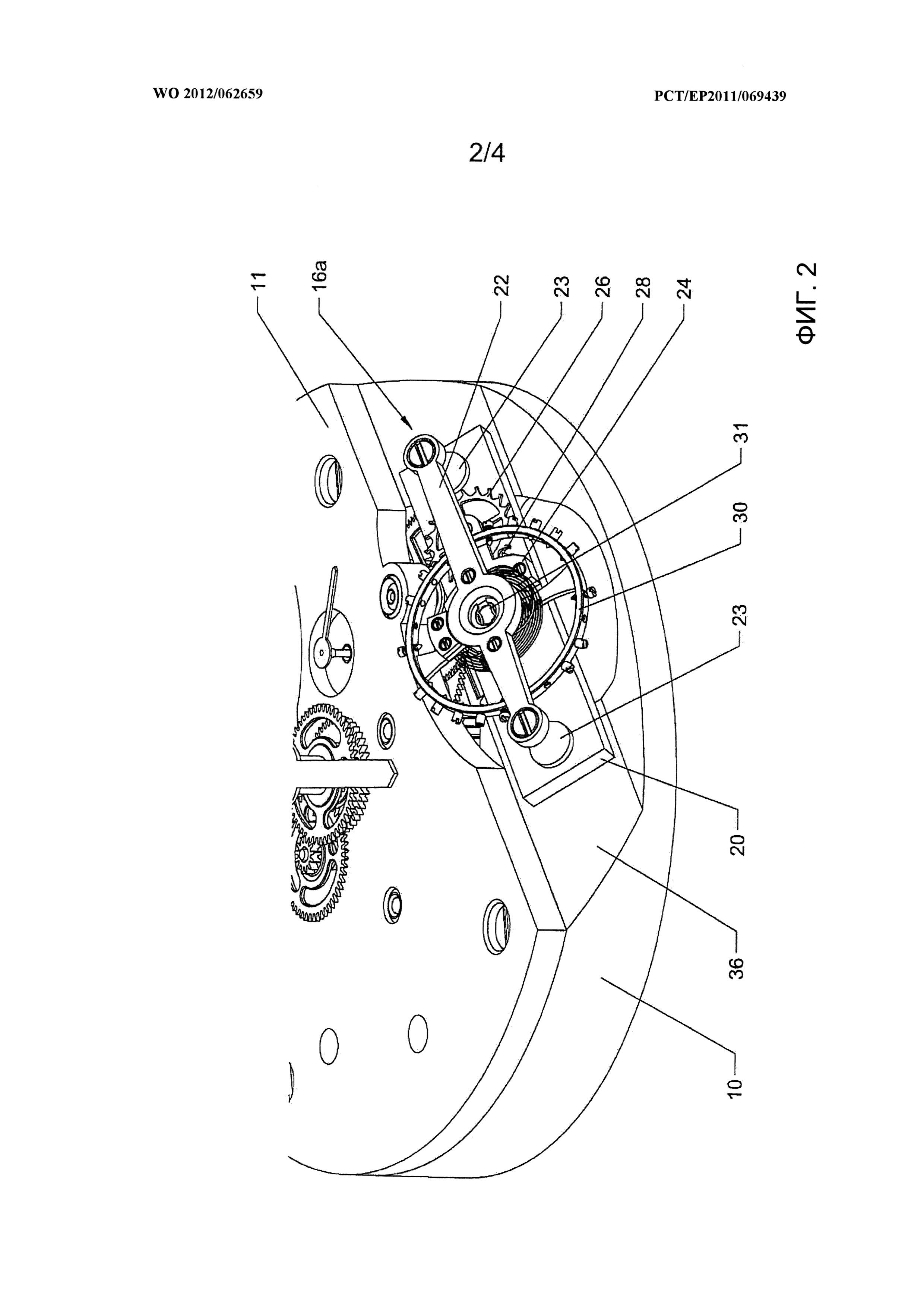
на фиг.2 показан подробный вид кинематического узла, показанного на фиг.1;
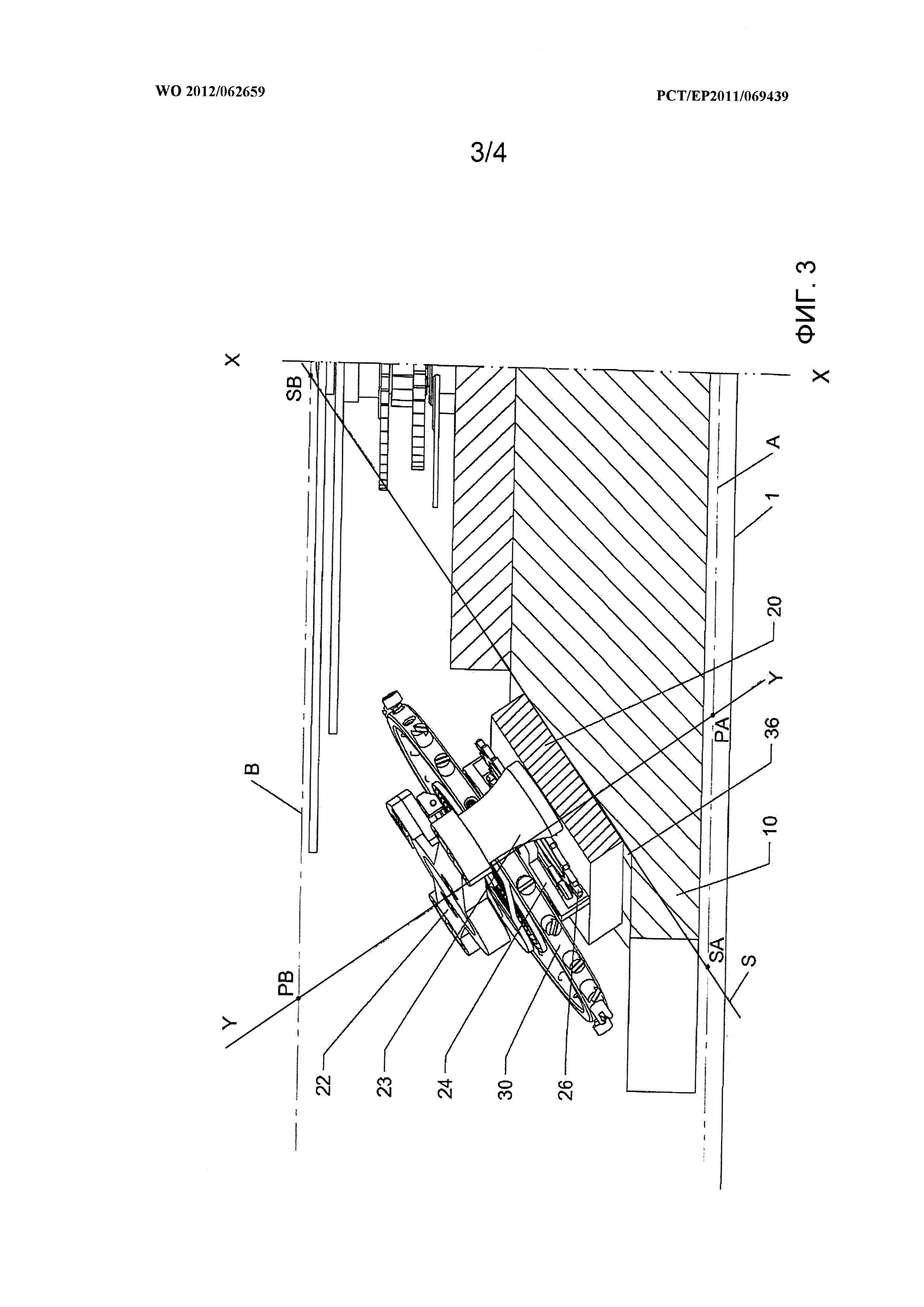
на фиг.3 показан разрез кинематического узла, показанного на фиг.2; и
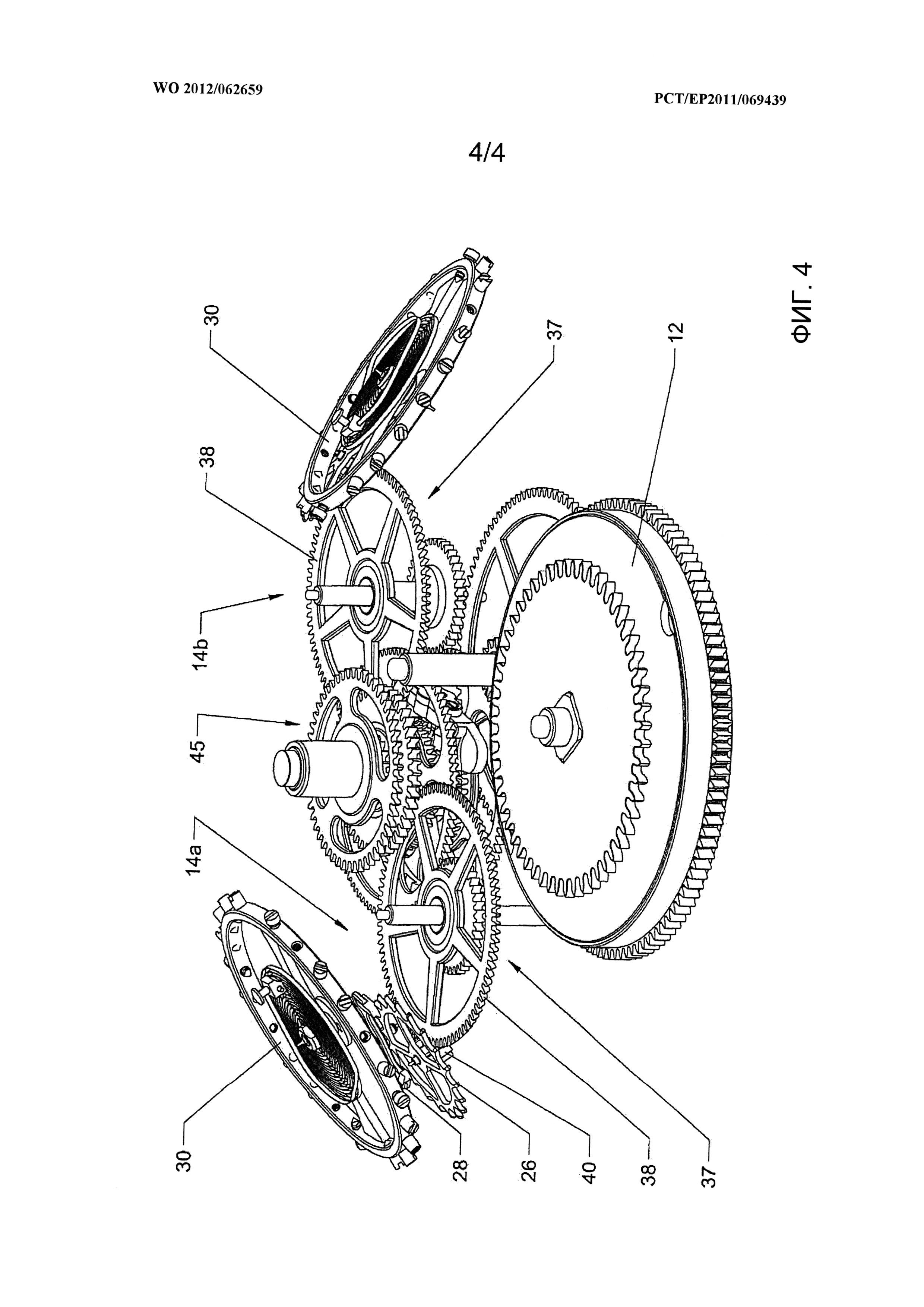
на фиг.4 схематически показан поэлементный вид кинематического узла часового механизма согласно настоящему изобретению без корпуса.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0022] Настоящее изобретение, показанное на фиг.1-4, относится к часовому механизму, содержащему нижнюю сторону, схематически обозначенную линией 1 на фиг.3, и отображающее средство 2, в качестве которого в настоящей заявке используются стрелки. На чертеже показаны первая эталонная плоскость A и вторая эталонная плоскость B, между которыми расположен часовой механизм. Первая и вторая эталонные плоскости A и B являются параллельными друг другу, причем первая эталонная плоскость A проходит по касательной к поверхности нижней стороны 1 часового механизма. Если нижняя сторона является по существу плоской и по существу образует плоскую поверхность, это означает, что эталонная плоскость A параллельна указанной плоской поверхности. Если нижняя сторона не является плоской, эталонная плоскость A является параллельной плоскости, сформированной точками поверхности нижней стороны, которые могут находиться в контакте с плоской поверхностью, на которой размещен часовой механизм, причем отображающее средство 2 обращено к пользователю. Вторая эталонная плоскость B расположена со стороны отображающего средства 2.
[0023] Таким образом, в конкретном случае наручных часов, эталонные плоскости A и B являются параллельными поверхности запястья владельца часов, причем плоскость A по существу расположена рядом с запястьем владельца часов, а плоскость B является самой дальней от его запястья.
[0024] Часовой механизм также содержит кинематический узел, в частности содержащий, согласно одному варианту реализации, показанному на чертеже: плату 10, основной мост 11, закрепленный на плате 10 посредством винтов 13 барабан 12 (как показано на фиг.4), который является источником энергии, две кинематические цепи 14a, 14b (как показано на фиг.4), два регулятора, соответственно образованные модульными анкерными механизмами 16a, 16b, и заводной и установочный механизм, в частности содержащий заводной вал 18, единственный компонент, видимый на указанных чертежах. Плата 10 имеет в целом дискообразную форму и задает базисную ось XX (как показано на фиг.3). Базисная ось XX в целом может быть осью симметрии или осью, проходящей через центр тяжести часового механизм, например, и является перпендикулярной эталонным плоскостям A и B.
[0025] В указанном кинематическом узле барабан 12 и компоненты кинематических цепей 14a, 14b вращаются вокруг осей, которые являются параллельными оси XX.
[0026] Для упрощения описания одни и те же ссылки будут использоваться одинаково для элементов любого из модульных анкерных механизмов 16a, 16b, кроме случаев, когда необходимо указать различие между элементами этих различных модульных анкерных механизмов.
[0027] Как показано на фиг.2 и 3, каждый модульный анкерный механизм 16a или 16b содержит основание 20 и закрепленный на нем посредством винтов (не обозначены) прямой балансный мост 22, две колонки 23, вставленные между основанием 20 и балансным мостом 22, и анкерный механизм 24. Количество колонок может быть различным. Очевидно, что указанный балансный мост может быть не прямым балансным мостом и может поддерживаться посредством одной колонки. Аналогично, анкерный мост может не быть прямым анкерным мостом. Анкерное колесо 26 и анкерная вилка 28, вместе формирующие анкерный механизм часов, с возможностью шарнирного поворота установлены между основанием 20 и анкерным мостом 24. Может быть использован анкер любого другого типа. Указанный механизм обеспечивает поддержку подпружиненного балансира 30, содержащего ось балансира, установленную между основанием 20 и балансным мостом 22 с возможностью вращения вокруг оси YY вращения (как показано на фиг. 3) в подшипниках 31, соответственно установленных в основании 20 и балансном мосте 22, причем на чертеже виден только один подшипник, установленный в балансном мосте 22. Указанные подшипники предпочтительно являются противоударными.
[0028] Плата 10, основной мост 11, основание 20, балансный мост 22 и анкерный мост 24 являются основными компонентами корпуса кинематического узла, причем основание 20, балансный мост 22 и анкерный мост 24 являются элементами модульного анкерного механизма.
[0029] Наружные поверхности платы 10 и основного моста 11 являются параллельными эталонным плоскостям A и B (как показано на фиг.3) и перпендикулярными базисной оси XX.
[0030] Согласно настоящему изобретению, корпус содержит расположенные с обеих сторон базисной оси XX два опорных элемента, каждый из которых имеет опорную поверхность 36. В показанном на чертеже варианте реализации указанные опорные элементы выполнены за одно целое с платой 10. Согласно другому варианту реализации (не показан) опорный элемент может состоять из одиночного моста, закрепленного на корпусе и имеющего опорную поверхность, как описано ниже. Также может быть использована комбинация мост/плата, имеющая наклонную поверхность.
[0031] На каждой опорной поверхности 36 расположены модульные анкерные механизмы 16a, 16b, так что ось YY вращения балансира 30 указанного модульного анкерного механизма 16a, 16b имеет наклон относительно указанных эталонных плоскостей A, B и пересекает их, причем точка PA пересечения оси YY с первой эталонной плоскостью по существу находится ближе к базисной оси XX, чем точка PB пересечения указанной оси YY со второй эталонной плоскостью B, при этом оси вращения балансиров 30 имеют наклон относительно друг друга.
[0032] Более конкретно, опорная поверхность 36 имеет наклон относительно эталонных плоскостей A и B и пересекает их, причем точка SA пересечения плоскости S, образованной опорной поверхностью 36, с первой эталонной плоскостью A по существу находится дальше от центральной оси XX, чем точка SB пересечения указанной плоскости S опорной поверхности 36 со второй эталонной плоскостью B, при этом углом между осью YY каждого балансира 30 и первой эталонной плоскостью по существу обязательно является немного меньше 90°.
[0033] Обычно по меньшей мере одна из осей YY имеет наклон от 10° до 80° предпочтительно от 30° до 60° относительно перпендикуляра к плоскостям A и B, причем указанный наклон зависит от характеристик данного кинематического узла. Например, одна из осей YY может иметь наклон 45°± 5° относительно перпендикуляра к плоскостям A и B. Разумеется, указанная конструкция также может иметь другие параметры для формирования указанного наклона, например, иметь выпуклую форму.
[0034] Согласно одному предпочтительному варианту реализации на каждой опорной поверхности 36 расположен модульный анкерный механизм 16a или 16b, так что ось YY вращения балансира 30 является перпендикулярной плоскости S указанной опорной поверхности 36, причем модульные анкерные механизмы расположены таким образом, что оси YY вращения балансиров 30 имеют наклон относительно друг друга.
[0035] Это означает, что в данном случае балансир 30 и компоненты 26 и 28 анкерного механизма вращаются вокруг своих осей, которые имеют наклон относительно плоскостей A и B кинематического узла, причем угол между осью YY и плоскостью B равен углу между плоскостью S, образованной опорной поверхностью 36, и перпендикуляром к плоскостям A и B.
[0036] Согласно другим вариантам реализации (не показаны) оси вращения балансира 30 и модульного анкерного механизма могут быть не перпендикулярны плоскости S опорной поверхности 36, однако условия ориентации согласно настоящему изобретению соблюдаются.
[0037] Как показано на фиг.2, основание 20 имеет прямоугольное поперечное сечение. Это означает, что основание 20 содержит верхнюю поверхность, обращенную к балансиру 30, и нижнюю поверхность, выполненную с возможностью опоры на опорную поверхность 36, причем указанная верхняя поверхность является параллельной нижней поверхности. Оси вращения балансира 30 и анкерного колеса 26 являются параллельными друг другу и перпендикулярными верхней и нижней поверхностям основания 20. Основание 20 может быть твердым телом, имеющим форму параллелепипеда. Согласно другим вариантам реализации (не показаны) основание может иметь вырезы для формирования центральной опоры для балансира и других элементов и боковые кронштейны для крепления модульного анкерного механизма на опорной поверхности.
[0038] Основание 20 прикреплено к опорной поверхности 36 с использованием направляющих и элементов крепления, расположенных в отверстиях, которые служат в качестве гнезд, выполненных в указанной опорной поверхности 36.
[0039] Элементы корпуса, такие как плата 10 и основной мост 11, имеют полости и вырезы, обеспечивающие, в частности, возможность вращения балансиров 30.
[0040] Сборка кинематического узла, описанного выше, начинается с размещения подшипников и направляющих и фиксирующих элементов. Затем на плате 10 устанавливаются механизмы и кинематические цепи. Одновременно собираются и настраиваются компоненты модульного анкерного механизма 16. Затем, в качестве завершающей операции, указанный модульный анкерный механизм размещают на плате 10. В случае необходимости, также может быть отрегулирован ход часового механизм.
[0041] Согласно настоящему изобретению элементы регулятора, расположенные в их соответствующем модульном анкерном механизме, могут быть извлечены из кинематического узла для настройки, при этом оси балансира и элементов регулятора по существу ориентированы вертикально. Это позволяет устранить наклон балансиров путем их размещения на внешних опорных поверхностях для настройки.
[0042] На фиг.3 показано другое преимущество, вытекающее из конфигурации, подобной конфигурации описанного выше кинематического узла. Благодаря размещению балансиров 30 с наклоном согласно настоящему изобретению направляющая и крепежные элементы основания модульного анкерного механизма расположены в направлении к внутренней части кинематического узла. Таким образом, могут быть расположены модульные анкерные механизмы, и таким образом балансиры 30 могут быть расположены рядом с периферийной областью платы без ограничения со стороны расположенных рядом в плате направляющей и крепежных элементов. В результате, центр кинематического узла является доступным для размещения других элементов.
[0043] Кроме того, поскольку балансиры 30 имеют наклон относительно плоскостей A и B, изменения между вертикальными положениями и горизонтальными положениями уменьшаются. Фактически, если часы находятся в горизонтальном положении, т.е., плоскости A и B являются горизонтальными, оси балансиров имеют наклон. Далее, если часы размещены в вертикальном положении, оси балансиров также имеют наклон и не являются горизонтальными, как в традиционных часах.
Кроме того, если часами не пользуются и они находятся в фиксированном положении, неблагоприятное положение одного из балансиров компенсируется благоприятным положением другого балансира, и таким образом уменьшается неравномерность хода часов. Таким образом, измеренные моментные показатели являются улучшенными независимо от положения часов (ношения или не ношения).
[0044] Кроме того, использование модульного анкерного механизма позволяет обеспечить целесообразную взаимозаменяемость.
[0045] Кроме того, основание модульного анкерного механизма имеет прямоугольное поперечное сечение, в результате чего упрощается его конструкция. Наклон балансиров может быть обеспечен, например, путем формирования наклонных опорных поверхностей на плате, для чего в целом потребуется больше операций по сравнению с другими частями кинематического узла.
[0046] Как показано на фиг.4, правильное соединение каждой из кинематических цепей 14a, 14b соответственно, в частности, с их вторичными колесами 38 и с анкерным трибом 40 анкерного колеса 26 обеспечено благодаря тому, что диск вторичного колеса 38 имеет наклонные зубцы. Также может быть использована противоположная конфигурация зубчатого соединения, т.е., наклонные зубцы, выполненные на трибе анкерной шестерни. Также может быть использована комбинация указанных конфигураций, т.е., наклонные зубцы на анкерной шестерне и наклонные зубцы на диске вторичного колеса.
[0047] Согласно другому варианту реализации, показанному на чертеже, кинематический узел содержит одиночный источник энергии, и кинематические цепи 14a и 14b содержат дифференциальный механизм 45, который приводит в действие указанные два вторичные колеса и трибы 37, которые соответственно приводят в действие анкерный триб 40.
[0048] Согласно другому варианту реализации (не показан) кинематический узел может быть несколько источников энергии, по числу кинематических цепей, каждая из которых связана со своим источником энергии, и таким образом, кинематические цепи являются независимыми друг от друга.
[0049] Кроме того, колеса кинематической цепи могут прямо или косвенно соединять источник или источники энергии с анкерами. В частности между кинематической цепью и источником энергии могут быть использованы другие промежуточные кинематические цепи.
[0050] В указанном кинематическом узле два балансира 30 имеют наклон относительно осей вращения колес кинематической цепи в частности. Согласно одному варианту реализации (не показан) только один из балансиров может иметь наклон, причем корпус в этом случае содержит одиночный опорный элемент, на который расположен модульный анкерный механизм с наклонным балансиром.
[0051] Такая конфигурация позволяет уменьшить неравномерность хода при различных положениях кинематического узла, в частности, если часы не находятся в положении ношения, два балансира не могут одновременно находиться в горизонтальном положении.
[0052] Кроме того, конструкция согласно изобретению позволяет поддерживать постоянную глубину нарезания зубцов вторичного колеса и анкерного триба даже в случае изменения высоты модульного анкерного механизма в кинематическом узле.
[0053] Как показано на фиг.1, отображающее средство выполнено с использованием колес, ось которых является перпендикулярной плоскости A. К тому же, кинематический узел содержит стрелочный механизм 42, который является известным и не будет описан подробно в настоящей заявке. Кроме того, отображающее средство может быть выполнено не только в форме стрелок, т.е., оно может быть выполнено в форме барабанов, дисков или может быть любым другим известным отображающим средством.
[0054] Кинематический узел согласно настоящему изобретению может быть выполнен в любой другой форме без выхода за пределы объема защиты настоящего изобретения.
[0055] В частности, описанные примеры показывают, что опорная поверхность 36 имеет наклон относительно эталонных плоскостей A и B с желательным углом, основание 20 модульного анкерного механизма имеет прямоугольное поперечное сечение. Однако согласно другим вариантам реализации (не показаны) опорная поверхность опорного элемента может быть плоской, модульный анкерный механизм и в частности его основание может иметь геометрию, позволяющую оси (YY) вращения балансира указанного модульного анкерного механизма иметь наклон относительно эталонных плоскостей (A, B) и пересекать их, причем точка пересечения оси (YY) вращения с первой эталонной плоскостью (A) находится ближе к базисной оси (XX), чем точка пересечения указанной оси (YY) вращения со второй эталонной плоскостью (B). Аналогично, опорная поверхность опорного элемента может иметь наклон, причем модульный анкерный механизм и в частности его основание могут иметь геометрию, позволяющую оси (YY) вращения балансира указанного модульного анкерного механизма иметь наклон относительно эталонных плоскостей (A, B) на желательный конечный угол и пересекать их, причем точка пересечения оси (YY) вращения с первой эталонной плоскостью (A) находится ближе к базисной оси (XX), чем точка пересечения указанной оси (YY) вращения со второй эталонной плоскостью (B).
[0056] Кроме того, источник энергии может содержать несколько барабанов, соединенных друг с другом последовательно или параллельно. Как описано выше, кинематический узел может содержать по меньшей мере два балансира. Указанные балансиры могут быть расположены рядом или наложены друг на друга полностью или частично.
[0057] Кроме того, согласно другим вариантам реализации (не показаны) оси вращения колес кинематических цепей 14a и/или 14b, а также ось вращения барабана могут иметь наклон относительно эталонных плоскостей A и B. В частности, они могут иметь наклон, обеспечивающий их параллельность с осями YY вращения балансиров 30.
[0058] Использование общей платы и/или общего основного моста относится только к одному возможному варианту реализации, и таким образом могут быть использованы отдельные платы и мосты.
[0059] Таким образом, благодаря особенностям различных вариантов выполнения кинематического узла согласно настоящему изобретению, может быть изготовлен часовой механизм, в частности предлагающий интересные технические решения и оригинальную эстетическую конструкцию.
Часовой механизм
Механизм турбийона для часов
Часовой механизм
Механизм турбийона для часов

