Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Группа изобретений относится к области механических измерений, а именно к определению тензора инерции летательных аппаратов и других тел цилиндрической формы, и может быть использована в авиации, космической технике, машиностроении и других отраслях промышленности.
Решение многих задач в различных областях науки и техники требует знания тензора инерции тела, например, при решении задач управления движением тела, при решении динамических задач, при контроле распределения масс, изучении степени износа механизмов и т.д.
В правой системе координат OXYZ с началом в какой-либо точке тела тензором инерции называется величина:
где JXX, JYY, JZZ - осевые моменты инерции;
JXY=JYX, JXZ=JZX, JYZ=JZY - центробежные моменты инерции.
Таким образом, задача определения тензора инерции сводится к определению трех осевых и трех центробежных моментов инерции тела.
Известен способ определения моментов инерции из описания изобретения под названием «Устройство для измерения моментов инерции транспортных машин» [Авторское свидетельство СССР №1185138, G01M 1/10, опубл. 15.10.1985]. Согласно способу изделие устанавливают на платформу, затем поочередно меняют взаимное положение осей изделия и оси колебания платформы относительно друг друга, при этом в каждом положении возбуждают колебательные движения платформы.
Поочередное изменение взаимного положения осей изделия и оси колебания платформы в данном способе меняют путем поочередной установки опор платформы, образующих ось колебания, в двух взаимно перпендикулярных плоскостях. Данные действия позволяют осуществить колебания изделия относительно двух его взаимно перпендикулярных осей, лежащих в горизонтальной плоскости. Для того чтобы осуществить колебания изделия относительно его третьей оси, расположенной в вертикальной плоскости, необходимо переустановить изделие на платформе в новое положение, при котором данная ось изделия примет горизонтальное положение и будет параллельна оси колебаний. При осуществлении колебаний в опорных элементах определяют момент трения, по которому аналитическим путем определяют моменты инерции изделия.
Данный способ позволяет с высокой точностью определять моменты инерции относительно трех ортогональных осей изделия при помощи простых и доступных средств.
Однако к недостаткам способа можно отнести снижение точности при определении моментов инерции изделия, обусловленное большой вероятностью рассогласования осей при переустановке изделия, и значительные трудозатраты, связанные с перестановкой опорных элементов и изделия.
Известен способ определения тензора инерции из описания изобретения под названием «Стенд для измерения массы, координат центра масс и тензора инерции изделия» [Патент РФ №2368880, G01M 1/10, опубл. 27.09.2009]. Согласно способу изделие устанавливают на платформу, затем поочередно меняют взаимное положение осей изделия и оси колебания платформы относительно друг друга, при этом в каждом положении возбуждают колебательные движения платформы, которые регистрируют датчиком колебаний и, по зарегистрированным датчиком значениям, определяют тензор инерции изделия.
В этом способе взаимное положение осей изделия и оси колебания платформы (выполненной в виде внутренней рамы) относительно друг друга изменяют путем последовательного возбуждения трех колебательных систем. Для этого внутренней, внешней и нижней рамам последовательно задают начальные угловые отклонения, под действием которых рамы с изделием совершают свободные затухающие колебания вокруг осей соответствующих шарниров. Таким образом, получается, что в любой момент времени в состоянии колебаний находится какая-либо одна рама. Далее, при помощи динамометрической платформы, измеряют три составляющие вектора инерционного момента вдоль соответствующих осей и определяют аналитическим путем моменты, входящие в состав тензора инерции.
Данный способ позволяет повысить точность определения тензора инерции за счет исключения возможности рассогласования осей стенда и изделия.
Недостатком этого способа является то, что для его реализации необходимо устройство, обладающее довольно сложной конструкцией, наличие которой может негативно сказаться на конечной точности определения тензора инерции данным способом.
Известен способ определения тензора инерции из описания изобретения под названием «Стенд для измерения массы, координат центра масс и тензора инерции изделия» [Патент РФ №2434213, G01M 1/10, опубл. 20.11.2011]. Согласно способу изделие устанавливают на позиционер, закрепленный на платформе, затем поочередно меняют взаимное положение осей изделия и оси колебания платформы относительно друг друга, при этом в каждом положении возбуждают колебательные движения платформы, которые регистрируют датчиком колебаний и, по зарегистрированным датчиком значениям, определяют тензор инерции изделия.
Для определения тензора инерции в данном способе изделие устанавливают на позиционер, закрепленный на платформе. Платформа выполнена в виде качалки, которую отклоняют при помощи второго винтового механизма на некоторый угол, выводят из зацепления с упором, в результате чего качалка вместе с изделием начинает совершать угловые затухающие колебания вокруг оси вращения шарниров. Далее изделие при помощи позиционера поворачивают «n» раз на угол «γ» вокруг вертикальной оси изделия и производят «n» последовательных возбуждений колебаний качалки. В процессе колебания качалки, при помощи датчиков колебаний и динамометрических элементов, измеряют амплитуды моментов и угловых ускорений, в результате чего получают две избыточные системы из «n» уравнений, которые решают методом наименьших квадратов и получают значения трех центробежных и двух осевых моментов, входящих в состав тензора инерции. Для определения третьего осевого момента качалку крепят фиксаторами к станине, освобождают вал позиционера и при помощи первого винтового механизма возбуждают крутильные колебания изделия вокруг вертикальной оси. В процессе колебаний, при помощи динамометрических элементов, измеряют значения моментов, по которым аналитическим путем определяют значение третьего осевого момента инерции.
Таким образом, данный способ позволяет определить три осевых и три центробежных момента, входящих в состав тензора инерции изделия, и предполагает использование двухстепенной колебательной системы, позволяя тем самым исключить, в некоторой степени, недостатки предыдущего аналога.
Данный способ выбран в качестве прототипа, так как он имеет наибольшее количество общих существенных признаков с заявляемым способом.
К недостаткам данного способа можно отнести значительные материальные и технологические затраты, связанные с изготовлением двух колебательных систем, а также ограниченную область применения, которая обусловлена тем, что изделие должно размещаться на качалке между опорами и свободно при этом поворачиваться вокруг вертикальной оси, что при значительных габаритах изделия не всегда возможно.
Известно устройство для определения тензора инерции под названием: «Устройство для измерения моментов инерции транспортных машин» (Авторское свидетельство СССР №1185138, МПК G01M 1/10, опубл. 15.10.1985). Оно содержит основание, установленные на нем опоры, на которых смонтирована платформа, механизм создания колебаний, кинематически связанный с платформой.
Причем опоры, в процессе измерения, жестко соединены с платформой при помощи крепежных элементов и расположены попарно в двух взаимно перпендикулярных плоскостях. Механизм создания колебаний выполнен в виде цилиндрического корпуса со штоком и фиксатором, а также снабжен упругим элементом и измерителем нагрузки. Кроме того, механизм создания колебаний шарнирно соединен с платформой и основанием, а места его установки находятся в плоскостях расположения опор. Для определения момента инерции изделия устройство, помимо измерителя нагрузки, снабжено аппаратурой для регистрации колебательного процесса.
Таким образом, конструкция данного устройства позволяет определять моменты инерции изделия относительно двух взаимно перпендикулярных осей, расположенных в горизонтальной плоскости, путем поочередной установки и снятия, соответственно, механизма создания колебаний и опор в обеих взаимно перпендикулярных плоскостях.
Однако конструкцией устройства не предусмотрено определение момента инерции относительно третьей вертикальной оси изделия. А заявитель, предположительно для этого, предлагает переустановить изделие на платформе в новое положение, при котором вертикальная ось изделия примет горизонтальное положение и после этого, по аналогии с предыдущими осями, определить момент инерции относительно данной оси. Следовательно, конструкция данного устройства не позволяет определить все три осевых момента инерции изделия, не прибегая к переустановке изделия. Кроме того, определение тензора инерции включает в себя определение еще и трех центробежных моментов, определение которых с помощью данного устройства приведет к необходимости неоднократной переустановки изделия. Поэтому к недостаткам данного устройства можно отнести необходимость в неоднократной переустановке изделия, что непременно приведет к рассогласованию осей изделия с измерительными осями устройства и, следовательно, к снижению точности определения всего тензора инерции.
Известен стенд для определения тензора инерции под названием: «Стенд для измерения массы, координат центра масс и тензора инерции изделия» (Патент РФ №2368880, МПК G01M 1/10, опубл. 27.09.2009). Он содержит основание, установленные на нем опоры с шарнирами, на которых смонтирована платформа, механизм создания колебаний, кинематически связанный с платформой, датчик колебаний, установленный с возможностью регистрации поворота платформы.
Платформа в данном стенде представляет собой поворотную раму, кинематически связанную с механизмом создания колебаний, выполненным в виде узла поворота. Помимо этого, поворотная рама установлена на динамометрической платформе, которая соединена посредством четырех вертикальных и двух горизонтальных динамометров с внутренней рамой, которая установлена на внешней раме с помощью опор с шарнирами, выполненными в виде двух кронштейнов с горизонтальными шарнирами. Внешняя рама также, при помощи двух кронштейнов с горизонтальными шарнирами, установлена на нижней раме, которая в свою очередь установлена с помощью вертикального шарнира на основании, выполненном в виде станины. Кроме шарниров рамы соединены между собой и станиной системой пружин, образуя три независимые колебательные системы, колебания которых регистрируют датчики колебаний, выполненные в виде датчиков углов, соединенных с осями шарниров и осью узла поворота.
Наличие трех независимых колебательных систем в данном стенде, в отличие от предыдущего аналога, позволяет определять тензор инерции путем однократной установки изделия на платформу, предотвращая возможность рассогласования осей изделия с осями колебательных систем, повышая тем самым точность определения тензора инерции.
Недостатками данного стенда являются сложность конструкции стенда и сравнительно низкая точность измерения моментов инерции. Сложность конструкции стенда вытекает из методики измерений, согласно которой колебания изделия осуществляются вокруг трех взаимно перпендикулярных осей, а служащая для этого система рам, в сочетании с удерживающими их опорами, не обеспечивает требуемой жесткости конструкции, что негативно сказывается на точности измерения моментов инерции. Также к недостаткам можно отнести большое удаление центра масс от оси вращения и динамометрической платформы, что также сказывается на точности определения тензора инерции.
Известен стенд под названием: «Стенд для измерения массы, координат центра масс и тензора инерции изделия» (Патент РФ №2434213, G01M 1/10, 20.11.2011). Он содержит основание, жестко установленные на нем опоры с шарнирами, на которых смонтирована платформа, механизм создания колебаний, кинематически связанный с платформой, датчик колебаний, установленный с возможностью регистрации поворота платформы, и позиционер.
Причем платформа выполнена в виде качалки и кинематически связана с механизмом создания колебаний, который представляет собой механизм отклонения качалки и две пары пружин, жестко установленные на основании и связанные с качалкой. Также на основании установлены два фиксатора, предназначенных для фиксации качалки в вертикальном положении. На качалке установлен позиционер, который выполнен в виде механического адаптера, механизма вертикального перемещения, поворотной и неподвижной платформ, которые, посредством динамометрических элементов и вала, установлены на динамометрической платформе. На валу имеются рычаги, кинематически связанные с двумя парами пружин, винтовым механизмом и фиксатором, обеспечивающими соответственно вращательные колебания и фиксацию позиционера вместе с изделием относительно вертикальной оси. Для регистрации колебаний, в данном устройстве, использованы датчики колебаний, выполненные в виде датчиков угла и соединенные с осями шарниров качалки и вала позиционера.
Таким образом, конструкция данного стенда позволяет поочередно возбуждать вращательные колебания изделия в двух независимых колебательных системах, исключая возможность рассогласования осей изделия и осей колебательных систем, обеспечивая при этом измерение всех параметров, необходимых для определения тензора инерции.
Известное устройство является наиболее близким аналогом к заявляемому стенду и выбрано в качестве прототипа, так как имеет наибольшее количество общих существенных признаков.
Недостатком данного стенда является относительная сложность конструкции, это связано с тем, что в стенде использованы две независимые колебательные системы. Также особенность взаимного расположения изделия, относительно горизонтальной оси колебания платформы, препятствует измерению моментов инерции габаритных изделий, снижая функциональные возможности стенда.
Анализ известных способов и устройств для определения тензора инерции позволяет сделать вывод, что известный уровень техники не обеспечивает создания способа, позволяющего с высокой точностью определять тензор инерции и использовать для этого устройство, обладающее относительно несложной конструкцией.
Задачей данной группы изобретений является создание способа, позволяющего с высокой точностью определять тензор инерции на стенде, обладающем относительно несложной конструкцией.
Техническим результатом заявляемой группы изобретений является повышение точности определения тензора инерции изделия и упрощение конструкции стенда, достигаемые за счет исключения возможности рассогласования осей изделия и оси колебания платформы, а также использование для этого одной независимой колебательной системы.
Для получения указанного технического результата в способе определения тензора инерции изделие устанавливают на позиционер, закрепленный на платформе, затем поочередно меняют взаимное положение осей изделия и оси колебания платформы относительно друг друга, при этом в каждом положении возбуждают колебательные движения платформы, которые регистрируют датчиком колебаний и по зарегистрированным датчиком значениям определяют тензор инерции изделия, согласно изобретению, положение осей изделия изменяют относительно оси колебания платформы, при этом взаимно перпендикулярные оси изделия и оси, образованные биссектрисами углов между этими осями, поочередно устанавливают параллельно оси колебания платформы.
Указанный технический результат достигается тем, что стенд для определения тензора инерции, содержащий основание, жестко установленные на нем опоры с шарнирами, на которых смонтирована платформа, механизм создания колебаний, кинематически связанный с платформой, датчик колебаний, установленный с возможностью регистрации поворота платформы, и позиционер, согласно изобретению снабжен центрирующим узлом, расположенным в точке сопряжения позиционера и платформы, которая смонтирована на шарнирах, оси вращения которых образуют ось колебания платформы, а позиционер установлен на платформе с возможностью фиксации и поворота в плоскости платформы вокруг центрирующего узла и выполнен в виде рамы и ложементов, в которых установлены бандажи, жестко закрепленные на изделии и выполненные с возможностью фиксации и поворота в ложементах вместе с изделием относительно одной из его осей.
Изобретения, заявляемые в составе группы изобретений, содержат признаки, отличающие их от наиболее близких аналогов, что позволяет считать их соответствующим условию «новизна».
Новые признаки, которые содержат отличительные части формулы изобретений, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
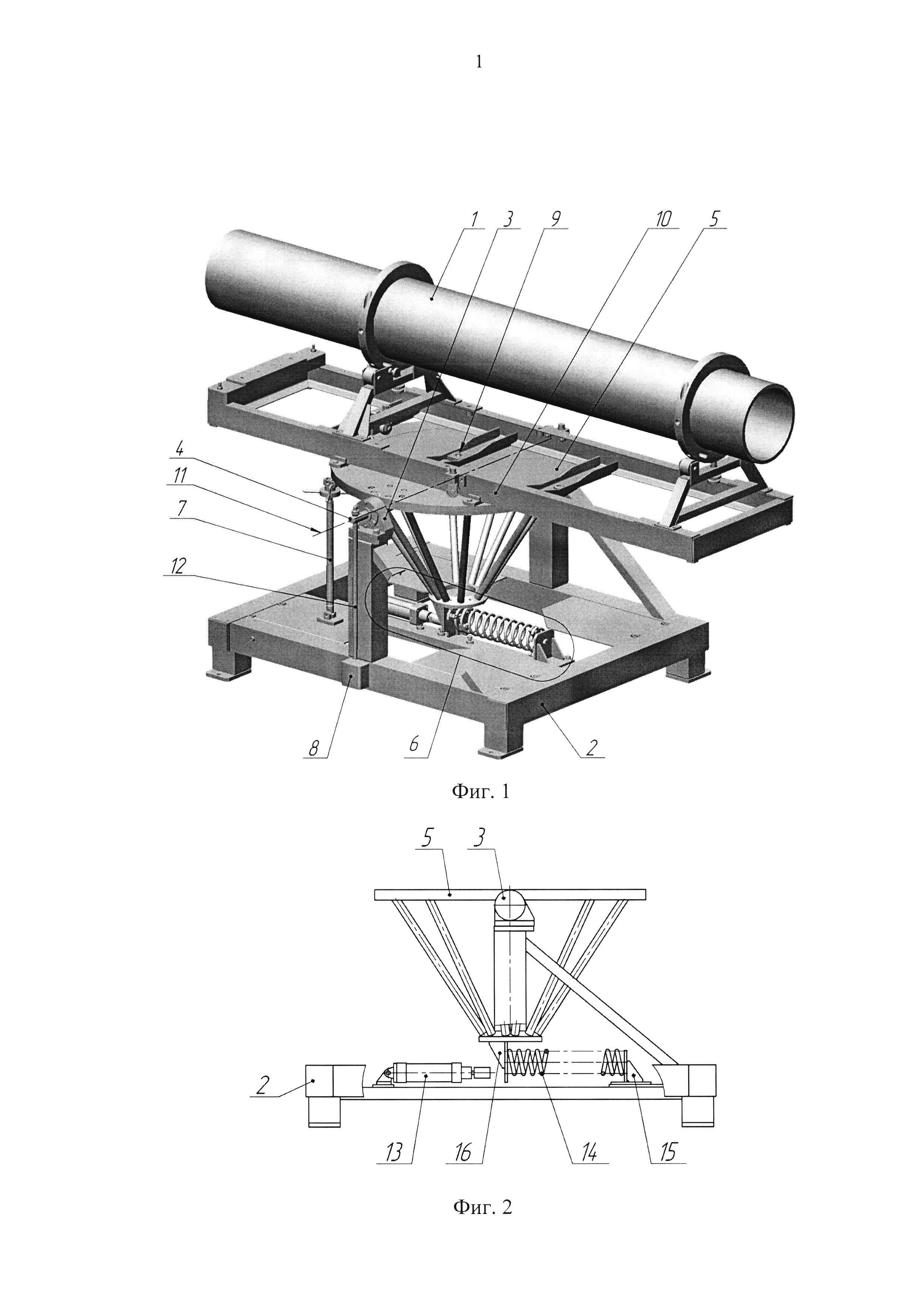
На фиг. 1 показана аксонометрическая проекция стенда для определения тензора инерции изделия.
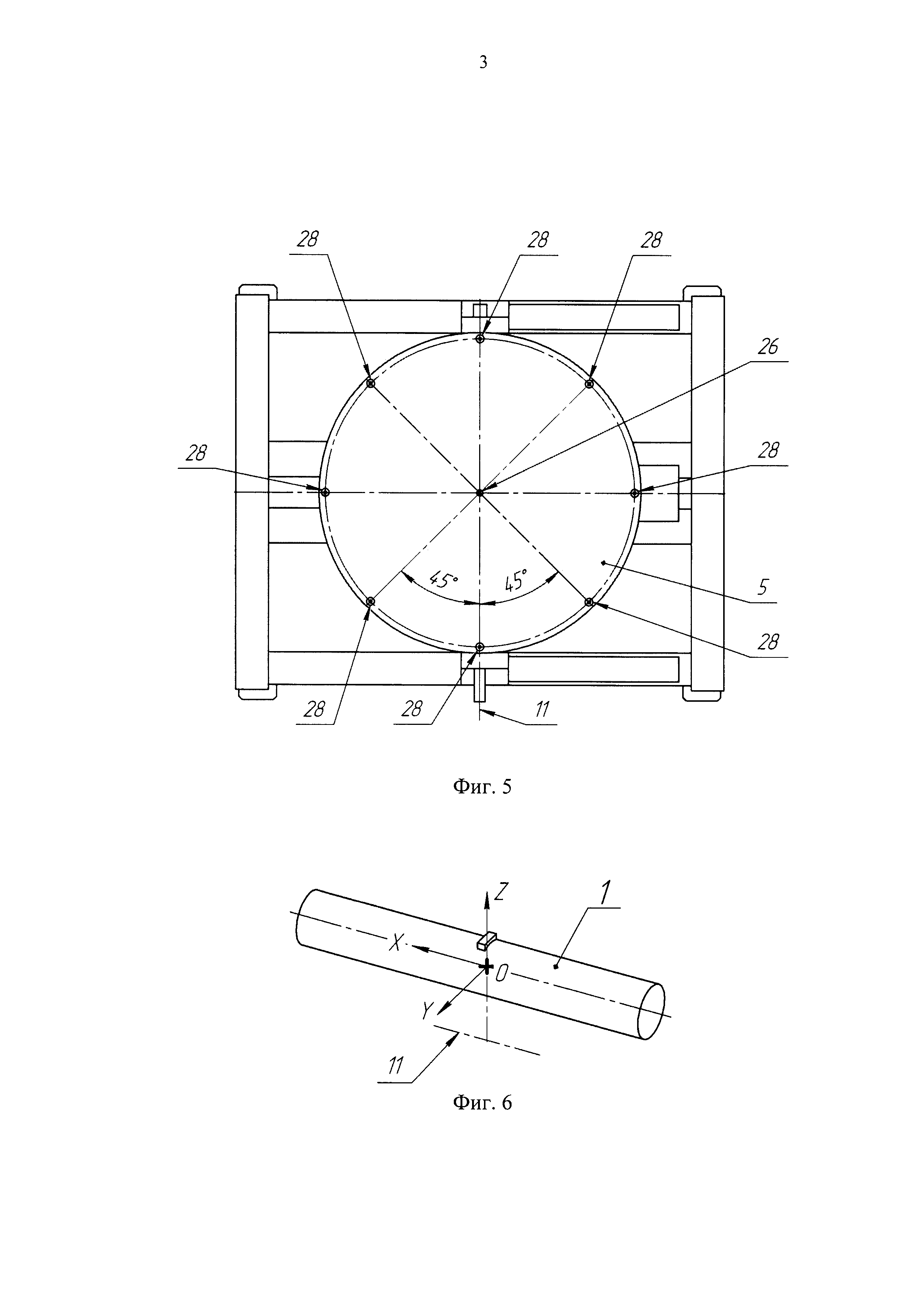
На фиг. 2 показана конструктивная схема механизма создания колебаний.
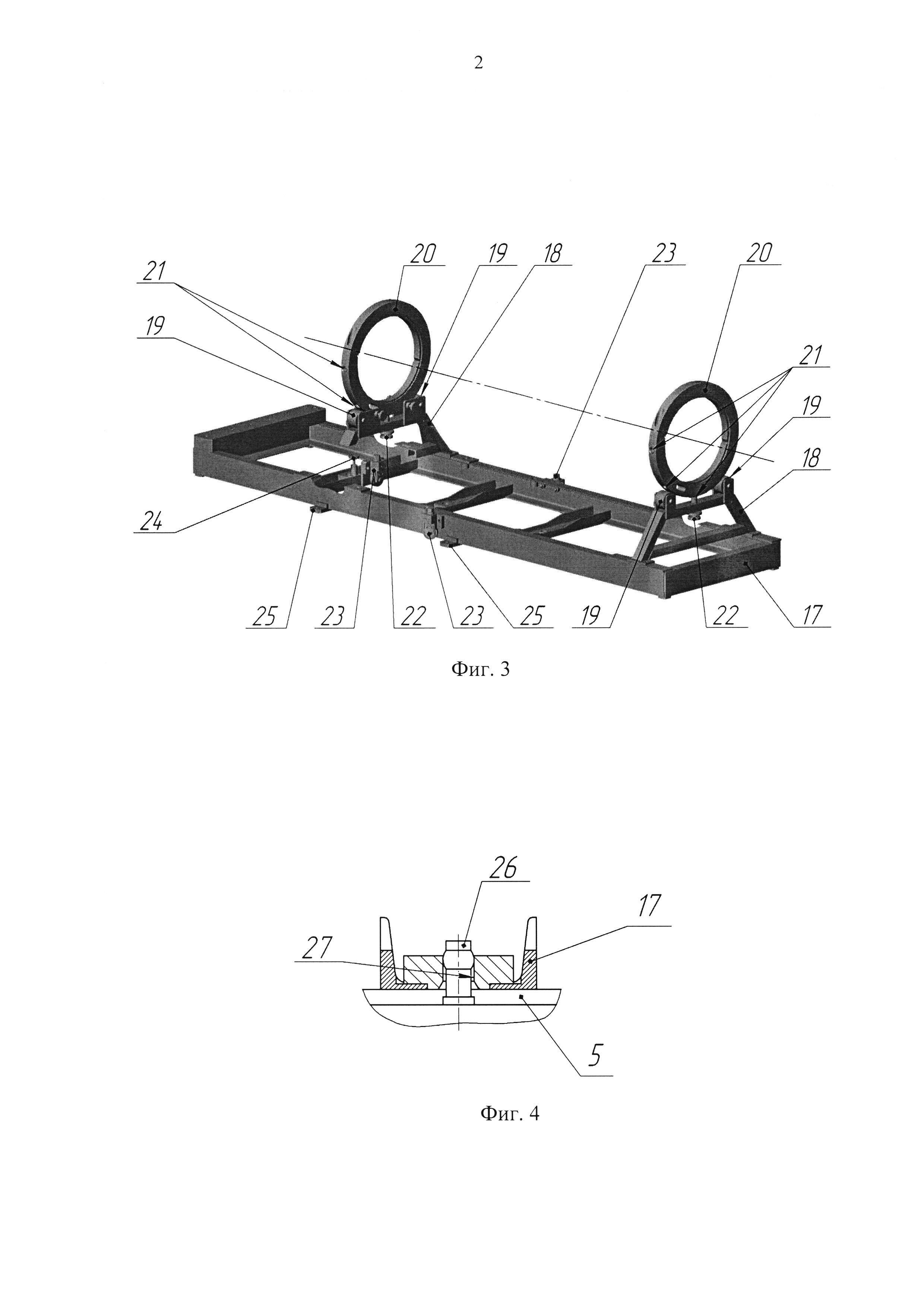
На фиг. 3 показана аксонометрическая проекция позиционера.
На фиг. 4 показана конструктивная схема центрирующего узла.
На фиг. 5 показана платформа, вид сверху.
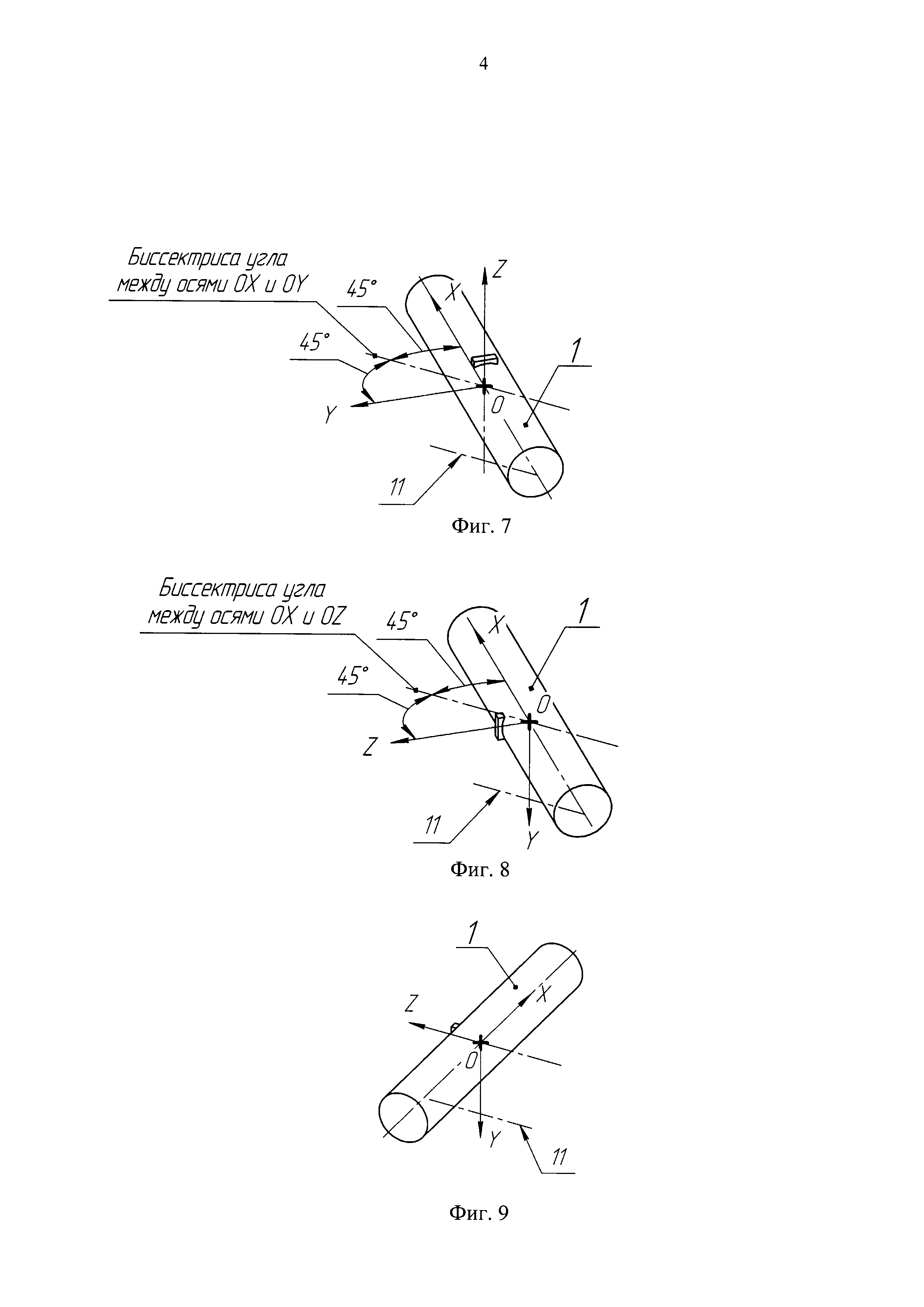
На фиг. 6 показано положение изделия, в котором ось OX изделия параллельна оси колебания платформы.
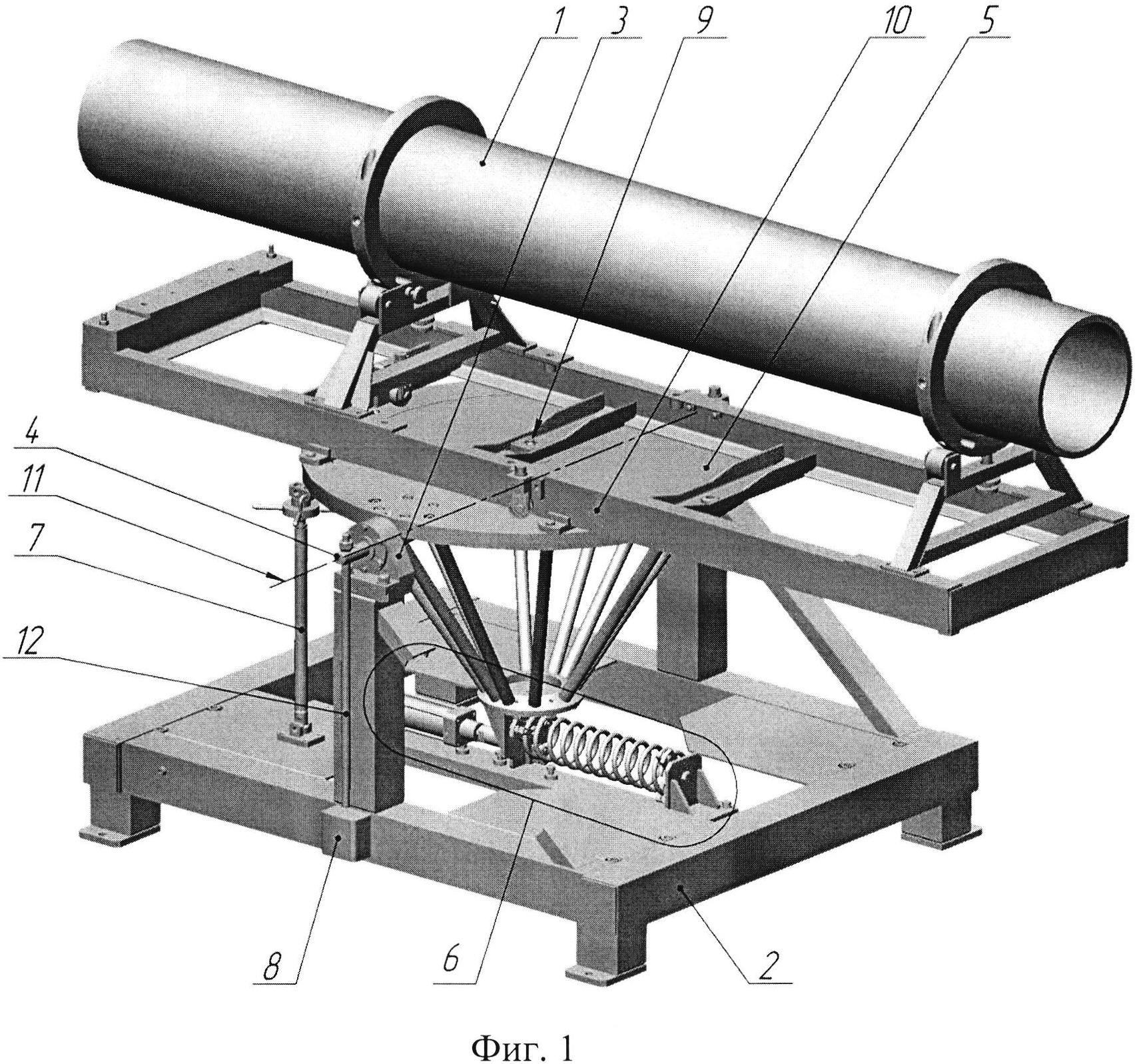
На фиг. 7 показано положение изделия, в котором ось, образованная биссектрисой угла между осями ОХ и OY изделия, параллельна оси колебания платформы.
На фиг. 8 показано положение изделия, в котором ось, образованная биссектрисой угла между осями ОХ и OZ изделия, параллельна оси колебания платформы.
На фиг. 9 показано положение изделия, в котором ось OZ изделия параллельна оси колебания платформы.
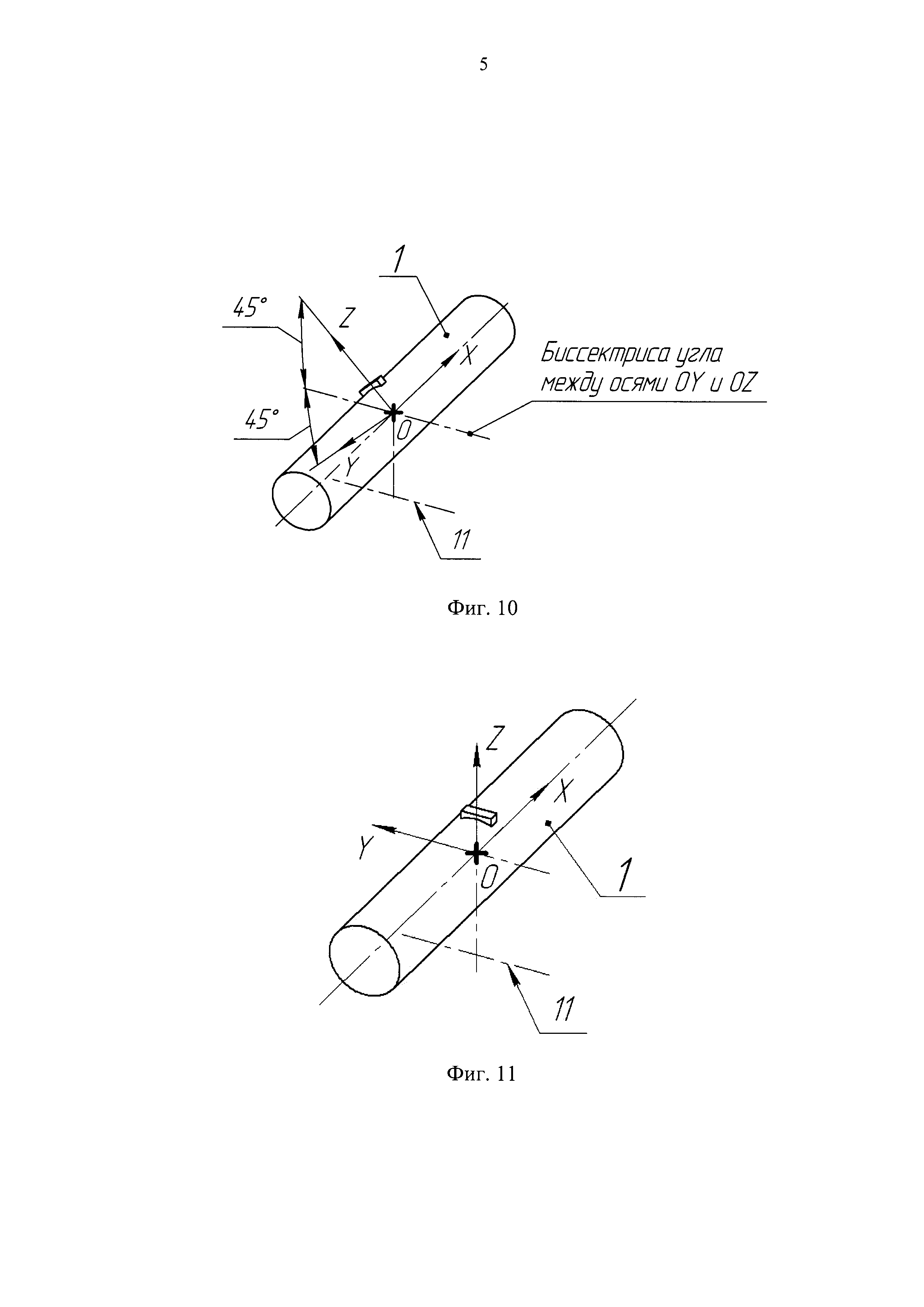
На фиг. 10 показано положение изделия, в котором ось, образованная биссектрисой угла между осями OY и OZ изделия, параллельна оси колебания платформы.
На фиг. 11 показано положение изделия, в котором ось OY изделия параллельна оси колебания платформы.
Стенд для определения тензора инерции изделия 1 (фиг. 1) содержит основание 2, опоры 3 с шарнирами 4, платформу 5, механизм создания колебаний 6, фиксатор 7, датчик колебаний 8, центрирующий узел 9 и позиционер 10.
На основании 2 жестко установлены опоры 3 с шарнирами 4, на которых смонтирована платформа 5, при этом ось поворота шарниров 4 образует ось колебания 11 (фиг. 1) платформы 5. Также на основании 2 установлены механизм создания колебаний 6 и фиксатор 7, при этом механизм создания колебаний 6 кинематически связан с платформой 5, а фиксатор 7 выполнен с возможностью фиксации платформы 5 в горизонтальном положении. Кроме того, на одном из шарниров 4 установлена штанга 12 (фиг. 1), которая обеспечивает регистрацию поворота платформы 5, путем взаимодействия с датчиком колебаний 8 в момент прохождения платформой 5 горизонтального положения.
Механизм создания колебаний 6 (фиг. 2) представляет собой пневмоцилиндр 13, закрепленный на основании 2 и расположенный в одной плоскости с пружиной 14, которая закреплена на кронштейнах 15 и 16, жестко установленных, соответственно, на основании 2 и платформе 5. Помимо этого, пневмоцилиндр 13 установлен напротив кронштейна 16 с возможностью отклонения платформы 5 от горизонтального положения.
Позиционер 10 (фиг. 3) состоит из рамы 17, двух жестко закрепленных на ней ложементов 18 с роликами 19, на которые установлены разъемные бандажи 20 для установки изделия 1. На наружной опорной поверхности бандажей 20 выполнены резьбовые отверстия 21, которые равноудалены друг от друга на угол 45° и предназначены для фиксации бандажей 20, путем ввинчивания в них стопоров 22, расположенных на ложементах 18. Кроме того, на раме 17 установлены выдвижные роликовые опоры 23 и стопор 24, предназначенные соответственно для перемещения и фиксации позиционера 10 в заданных угловых положениях. Также на раме 17 имеются крепежные пластины 25, предназначенные для крепления позиционера 10 к платформе 5.
Позиционер 10 установлен на платформе 5 с возможностью фиксации и поворота в плоскости платформы 5 вокруг центрирующего узла 9 (фиг. 4), выполненного в виде направляющего штыря 26, расположенного в центральной части платформы 5, и направляющего отверстия 27, выполненного в раме 17 позиционера 10.
Для установки позиционера 10 в заданные положения при повороте вокруг центрирующего узла 9 и его фиксации в этих положениях в платформе 5 вокруг направляющего штыря 26 через 45° выполнены отверстия 28 (фиг. 5). При этом два отверстия 28 расположены в плоскости оси колебания 11, а расстояния от отверстий 28 до направляющего штыря 26 равны расстоянию от стопора 24 до направляющего отверстия 27.
Для осуществления способа определения тензора инерции изделия 1 позиционер 10 устанавливают на платформу 5, стопор 24 вводят в одно из двух отверстий 28, расположенных в плоскости оси колебания 11, а затем фиксируют позиционер 10 в этом положении при помощи крепежных пластин 25. Далее разъемные бандажи 20 устанавливают на ложементы 18, ввинчивают стопоры 22 в резьбовые отверстия 21, разъединяют разъемные части бандажей 20, загружают изделие 1 между разъемными частями и жестко крепят бандажи 20 на изделии 1. Таким образом, изделие 1 занимает положение (фиг. 6), в котором его ось ОХ параллельна оси колебания 11.
Убедившись в надежности крепления позиционера 10, бандажей 20 и изделия 1, платформу 5 освобождают от фиксатора 7 и отклоняют платформу 5 от горизонтального положения, путем воздействия пневмоцилиндра 13 на кронштейн 16. В результате чего, под действием пружины 14, платформа 5 вместе с позиционером 20 и изделием 1 начинает совершать вращательные колебательные движения вокруг оси колебания 11. Колебания платформы 5 передаются через один из шарниров 4 на штангу 12, которая взаимодействует с датчиком колебаний 8. В результате их взаимодействия датчик колебаний 8 регистрирует значение периода колебаний платформы 5. Далее, используя полученное значение, определяют момент инерции изделия 1 относительно оси ОХ по формуле:

где JXX - момент инерции изделия 1 относительно оси ОХ;
TXX - период колебаний платформы 5 с позиционером 10 и изделием 1;
c - жесткость пружины 14;
L - расстояние от оси колебания 11 до оси пружины 14;
m - суммарная масса платформы 5 с позиционером 10 и изделием 1;
g - ускорение свободного падения;
r - расстояние от оси колебания 11 до суммарного центра масс платформы 5 с позиционером 10 и изделием 1;
JXXосн - момент инерции платформы 5 с позиционером 10 без изделия 1 относительно оси ОХ;
mизд - масса изделия 1;
rизд - расстояние от оси колебания 11 до центра масс изделия 1.
После того как платформа 5 совершит необходимое количество колебательных движений, ее останавливают и фиксируют при помощи фиксатора 7 в горизонтальном положении.
Затем раскрепляют крепежные пластины 25, выводят стопор 24 из отверстия 28, выдвигают роликовые опоры 23 и поворачивают позиционер 10 в плоскости платформы 5 вокруг центрирующего узла 9 на угол 45°. После этого задвигают роликовые опоры 23, вводят стопор 24 в отверстие 28 и закрепляют позиционер 10 при помощи крепежных пластин 25. В результате проделанных операций изделие 1 займет положение (фиг. 7), в котором его ось, образованная биссектрисой угла между осями ОХ и OY изделия 1, параллельна оси колебания 11. Далее платформу 5 освобождают от фиксатора 7 и снова задают вращательные колебательные движения платформы 5 вокруг оси колебания 11. Аналогичным образом определяют значение периода колебаний платформы 5 и, используя полученное значение, определяют момент инерции изделия 1 относительно биссектрисы угла между осями ОX и OY по формуле:

где JБXY - момент инерции изделия 1 относительно оси, образованной биссектрисой угла между осями ОХ и OY;
ТБXY - период колебаний платформы 5 с позиционером 10 и изделием 1;
с - жесткость пружины 14;
L - расстояние от оси колебания 11 до оси пружины 14;
m - суммарная масса платформы 5 с позиционером 10 и изделием 1;
g - ускорение свободного падения;
r - расстояние от оси колебания 11 до суммарного центра масс платформы 5 с позиционером 10 и изделием 1;
JБXYосн - момент инерции платформы 5 с позиционером 10 без изделия 1 относительно оси, образованной биссектрисой угла между осями ОX и OY;
mизд - масса изделия 1;
rизд - расстояние от оси колебания 11 до центра масс изделия 1.
Затем платформу 5 снова останавливают, фиксируют в горизонтальном положении, вывинчивают стопоры 22 из резьбовых отверстий 21, поворачивают бандажи 20 вместе с изделием 1 на угол 90°, путем перекатывания бандажей по роликам 19, после чего снова ввинчивают стопоры 22 в резьбовые отверстия 21. В результате проделанных операций изделие 1 займет положение (фиг. 8), в котором его ось, образованная биссектрисой угла между осями ОX и OZ, будет параллельна оси колебания 11. После этого по аналогии с предшествующими этапами определяют значение периода колебаний платформы 5 и, используя полученное значение, определяют момент инерции изделия 1 относительно оси, образованной биссектрисой угла между осями ОX и OZ, по формуле:

где JБXZ - момент инерции изделия 1 относительно оси, образованной биссектрисой угла осями ОХ и OZ;
ТБXZ - период колебаний платформы 5 с позиционером 10 и изделием 1;
с - жесткость пружины 14;
L - расстояние от оси колебания 11 до оси пружины 14;
m - суммарная масса платформы 5 с позиционером 10 и изделием 1;
g - ускорение свободного падения;
r - расстояние от оси колебания 11 до суммарного центра масс платформы 5 с позиционером 10 и изделием 1;
JБXZосн - момент инерции платформы 5 с позиционером 10 без изделия 1 относительно оси, образованной биссектрисой угла осями ОX и OZ;
mизд - масса изделия 1;
rизд - расстояние от оси колебания 11 до центра масс изделия 1.
Далее изделие 1 перемещают в новое положение (фиг. 9), в котором ось OZ изделия 1 будет параллельна оси колебания 11. Для этого раскрепляют крепежные пластины 25, выводят стопор 24 из отверстия 28, выдвигают роликовые опоры 23, поворачивают позиционер 10 в плоскости платформы 5 вокруг центрирующего узла 9 на угол 45°, задвигают роликовые опоры 23, вводят стопор 24 в отверстие 28 и закрепляют позиционер 10 при помощи крепежных пластин 25.
После этого по аналогии с предшествующими этапами определяют значение периода колебаний платформы 5 и, используя полученное значение, определяют момент инерции изделия 1 относительно оси OZ по формуле:

где JZZ - момент инерции изделия 1 относительно оси OZ;
TZZ - период колебаний платформы 5 с позиционером 10 и изделием 1;
c - жесткость пружины 14;
L - расстояние от оси колебания 11 до оси пружины 14;
m - суммарная масса платформы 5 с позиционером 10 и изделием 1;
g - ускорение свободного падения;
r - расстояние от оси колебания 11 до суммарного центра масс платформы 5 с позиционером 10 и изделием 1;
JZZосн - момент инерции платформы 5 с позиционером 10 без изделия 1 относительно оси OZ;
mизд - масса изделия 1;
rизд - расстояние от оси колебания 11 до центра масс изделия 1.
Для перевода изделия 1 в следующее положение (фиг. 10) вывинчивают стопоры 22 из резьбовых отверстий 21, поворачивают бандажи 20 вместе с изделием 1 на угол 45°, путем перекатывания бандажей по роликам 19, после чего снова ввинчивают стопоры 22 в резьбовые отверстия 21. В результате проделанных операций изделие 1 займет положение, в котором его ось, образованная биссектрисой угла между осями OY и OZ изделия 1, будет параллельна оси колебания 11. После этого по аналогии с предшествующими этапами определяют значение периода колебаний платформы 5 и, используя полученное значение, определяют момент инерции изделия 1 относительно оси, образованной биссектрисой угла между осями OY и OZ, по формуле:

где JБYZ - момент инерции изделия 1 относительно оси, образованной биссектрисой угла между положительными направлениями осей OY и OZ, проходящей через его центр масс параллельно оси колебания 11;
TБYZ - период колебаний платформы 5 с позиционером 10 и изделием 1;
с - жесткость пружины 14;
L - расстояние от оси колебания 11 до оси пружины 14;
m - суммарная масса платформы 5 с позиционером 10 и изделием 1;
g - ускорение свободного падения;
r - расстояние от оси колебания 11 до суммарного центра масс платформы 5 с позиционером 10 и изделием 1;
JБYZосн - момент инерции платформы 5 с позиционером 10 без изделия 1 относительно оси, образованной биссектрисой угла между осями OY и OZ;
mизд - масса изделия 1;
rизд - расстояние от оси колебания 11 до центра масс изделия 1.
После изделие 1 переводят в новое положение (фиг. 11). Для этого вывинчивают стопоры 22 из резьбовых отверстий 21, поворачивают бандажи 20 вместе с изделием 1 на угол 45°, путем перекатывания бандажей по роликам 19, после чего снова ввинчивают стопоры 22 в резьбовые отверстия 21. В результате проделанных операций изделие 1 займет положение, в котором его ось OY будет параллельна оси колебания 11. После этого по аналогии с предшествующими этапами определяют значение периода колебаний платформы 5 и, используя полученное значение, определяют момент инерции изделия 1 относительно оси OY по формуле:

где JYY - момент инерции изделия 1 относительно оси OY;
TYY - период колебаний платформы 5 с позиционером 10 и изделием 1;
с - жесткость пружины 14;
L - расстояние от оси колебания 11 до оси пружины 14;
m - суммарная масса платформы 5 с позиционером 10 и изделием 1;
g - ускорение свободного падения;
r - расстояние от оси колебания 11 до суммарного центра масс платформы 5 с позиционером 10 и изделием 1;
Jосн - момент инерции платформы 5 с позиционером 10 без изделия 1 относительно оси OY;
mизд - масса изделия 1;
rизд - расстояние от оси колебания 11 до центра масс изделия 1.
Значения параметров с, L, m, r, Jосн, mизд, rизд, входящих в состав формул (2)…(7), являются постоянными характеристиками стенда и изделия и определяются в процессе их изготовления.
В результате проделанных операций получаем значения трех осевых моментов инерции изделия 1 и трех моментов инерции изделия 1 относительно осей, образованных биссектрисами угла между осями OX, OY и OZ. Используя полученные значения, определяем центробежные моменты инерции изделия 1 по следующим формулам.
Центробежный момент инерции JXY=JYX изделия 1 определяют по формуле:

где JXY - центробежный момент инерции изделия 1;
JXX - момент инерции изделия 1, вычисленный по формуле (2);
JYY - момент инерции изделия 1, вычисленный по формуле (7);
JБXY - момент инерции изделия 1, вычисленный по формуле (3).
Центробежный момент инерции JXZ=JZX изделия 1 определяют по формуле:
где JXZ - центробежный момент инерции изделия 1;
JXX - момент инерции изделия 1, вычисленный по формуле (2);
JZZ - момент инерции изделия 1, вычисленный по формуле (5);
JБXZ - момент инерции изделия 1, вычисленный по формуле (4).
Центробежный момент инерции JYZ=JZY изделия 1 определяют по формуле:

где JYZ - центробежный момент инерции изделия 1;
JYY - момент инерции изделия 1, вычисленный по формуле (7);
JZZ - момент инерции изделия 1, вычисленный по формуле (5);
JБYZ - момент инерции изделия 1, вычисленный по формуле (6).
Таким образом, для определения осевых (JXX, JYY, JZZ) моментов инерции необходимо расположить изделие 1 относительно оси колебания 11 в трех положениях, при которых оси OX, OY, OZ поочередно будут параллельны оси колебания 11, определить значения периодов колебаний (JXX, ТYY, TZZ) и вычислить осевые моменты по формулам (2), (5) и (7) соответственно. Для определения центробежных моментов (JXY=JYX, JXZ=JZX, JYZ=JZY) необходимо расположить изделие 1 относительно оси колебания 11 в трех положениях, при которых оси, образованные биссектрисами угла между осями OX, OY, OZ, поочередно будут параллельны оси колебания 11, замерить периоды колебаний (ТБXY, TБXZ, TБYZ) и вычислить моменты инерции относительно осей, образованных биссектрисами, по формулам (3), (4) и (6) соответственно, затем вычислить центробежные моменты инерции изделия 1 по формулам (8), (9) и (10).
При определении трех осевых и трех центробежных моментов инерции в полном объеме была решена задача определения тензора инерции изделия с высокой точностью, исключением рассогласования осей и использованием одной независимой колебательной системы.
Заявляемая группа изобретений была промышленно применена для определения тензора инерции эталонной меры моментов инерции, представляющей собой цилиндрическое тело с точно рассчитанными осевыми и центробежными моментами инерции. В результате чего были получены значения, отличающиеся не более чем на 1% от расчетных значений осевых и центробежных моментов инерции. Данный факт указывает на то, что заявляемая группа изобретений соответствует критерию патентоспособности «промышленная применимость» и обеспечивает высокую точность при определении тензора инерции.
Стенд для моделирования воздействия аэродинамической нагрузки на раскрывающиеся элементы летательных аппаратов
Способ автоматического считывания показаний стрелочных приборов
Способ управления воздушной установкой пожаротушения и устройство для его реализации
Спринклер с контролем срабатывания
Грузозахватное устройство
Устройство для прессования изделий из порошка
Модульный центр обработки данных
Разветвитель детонации в ударно-волновых трубках
Пластичный взрывчатый состав
Устройство защиты
Стенд для моделирования воздействия аэродинамической нагрузки на раскрывающиеся элементы летательных аппаратов
Способ автоматического считывания показаний стрелочных приборов
Способ управления воздушной установкой пожаротушения и устройство для его реализации
Спринклер с контролем срабатывания
Грузозахватное устройство
Устройство для прессования изделий из порошка
Модульный центр обработки данных
Разветвитель детонации в ударно-волновых трубках
Способ управления и устройство спринклерной воздушной установки пожаротушения
Устройство комплексного обследования элементов системы управления и защиты ядерного реактора

